1. Introduction
Underwater noise radiated from ships on the water is a significant component of low-frequency ambient noise (<100 Hz) in the ocean [
1]. During actual navigation, the vibrations of the rotating machinery of a ship’s power system and propeller blades will inevitably result in the radiation of periodic noise that will spread to surrounding sea areas [
2]. Usually, the noise radiated from a ship consists of a combination of a line spectrum and a continuum spectrum [
3,
4]. The line spectrum is an important part of this noise, and it describes the periodic part of the target radiated noise signal, such as the periodic noise generated by propellers and auxiliary machines [
5,
6]. A ship’s line spectrum is stable and can improve the detection distance of passive sonar [
7]. Therefore, in passive-sonar signal processing, the detection and extraction of a ship’s line-spectrum features has always been a topic of intensive research in the field of underwater acoustics; it has important application value in the field of ocean observation and national defense. With the development of vibration- and noise-reduction technology, the noise levels radiated from ships have been greatly reduced and they continue to decrease. Improving the detection ability for weak signals is thus of great significance for detecting such quiet underwater targets [
8]. The frequency characteristics of the line spectrum are related to the physical characteristics of the targets, which means it is an important feature for passive sonar target detection. Burenkov et al. [
9] conducted an experimental study for the propagation characteristics of the line spectrum, and their results showed that a continuous wave (CW) signal with the features of a line spectrum can propagate for 9000 km and still retain a stable phase.
Generally, when attempting to enhance the signal-to-noise (SNR) ratios of sonar signals, designers target spatial or time processing gains [
10]. Passive detection systems based on modern spectral-estimation algorithms (such as MUSIC [
11] and ESPRIT [
12]) all use array-processing methods. This approach can result in spatial processing gains, but it has problems such as high system overhead, difficult array design, and inflexible deployment, and these systems cannot be installed in the case of limited platform size. Small underwater platforms such as underwater gliders, unmanned underwater vehicles, and submersible buoy systems have the advantages of small size, flexibility, and easy concealment, and they are widely used in the field of underwater target detection. Generally, only a single hydrophone can be carried on these small platforms. Underwater target-detection methods based on a single hydrophone mainly use the line spectrum. The SNR of the line spectrum thus directly affects the detection capability of such passive sonar systems.
Researchers around the world have invested significant efforts to improve the line-spectrum detection capability of passive sonar. Firstly, the average periodogram method was proposed [
13], which divides the received signal sequence into several segments, calculates the periodogram for each segment separately, and then takes the average of each periodogram as an estimate of the power spectrum. This method reduces the random fluctuations of the traditional periodogram method. Then, the Welch method [
14], which combines windowing and average processing, was proposed. In the Welch method, the segmented data are multiplied by a window function, their periodograms are calculated separately, and then they are averaged. The spectral-estimation curve obtained by this method is smoother and has less variance, which is beneficial for the extraction of the line spectrum.
Background-equalization technology can effectively filter the random fluctuations of background noise, and it is widely used to smooth the background noise on a power spectrum curve. Struzinski and Lowe [
15] studied four background-equalization algorithms—the two-pass mean, the split three-pass mean (also called the two-pass split-window [
16,
17]), the order truncate average, and the split average exclude average method—and compared their performances. Using the differences in the autocorrelation function between the line spectrum and the background noise, the adaptive background-equalization algorithm can be applied to estimate the mean value of the background noise in a shallow sea multipath channel [
18]. This algorithm improves the detection ability of the line spectrum under background noise. For detection in a high-clutter environment, an efficient constant false-alarm rate normalizer has been proposed [
19] and this has excellent detection performance. Passive detection of targets under ice has been studied and an α-comparator [
20] based on a one-dimensional Kalman filter was proposed. This smooths the background noise and improves the detection ability. In addition, the use of a Kalman filter combined with fast-Fourier-transform processing [
21] has been shown to improve the weak line spectrum of ships.
Most of the above methods smooth the continuous spectrum from the perspective of background equalization to extract the line spectrum. However, their performance is poor in the case of a low input SNR. Under a low input SNR, adaptive line enhancement (ALE) is usually used to preprocess received passive-sonar signals [
22]. The basic idea of adaptive line-spectrum enhancement is to extract the periodic line spectrum from the broadband noise by using the difference in correlation length between the narrowband line spectrum and the broadband noise. Initially, a traditional ALE [
23,
24] based on a least-mean-square algorithm was designed to process the time-domain signal and obtain a certain gain. In the ideal case, the SNR gain obtained by traditional ALE is proportional to the number of filter taps [
25]; at low input SNR, a larger gain can be obtained by increasing the number of filter taps. However, each adaptive weighting of the traditional ALE technique will have an impact on the weight-noise component: the larger the number of taps, the greater the mean-square error of the traditional ALE output, and this will affect the SNR gain. More recently, a sparsity-induced frequency-domain ALE technique was developed [
26,
27], and this incorporates a sparsity penalty into the frequency-domain adaptation, suppressing the weight-noise component and improving the SNR gain.
In summary, in single-hydrophone passive detection, there are currently two main methods for improving the line-spectrum SNR: background equalization and ALE. Background equalization techniques are generally suitable for normal SNR. Additionally, background equalization techniques are less effective when the signal amplitude is not significant relative to the noise amplitude. The ALE is an adaptive spectrum estimation technique for detecting single-frequency signals or narrowband signals in the background of broadband noise, but the method converges slowly under the low SNR. Moreover, when there are multiple line spectra in the frequency spectrum, the enhancement range of the weak line spectrum is smaller than that of the strong line spectrum. In this paper, to improve the line-spectrum detection ability of a single hydrophone, the SHCS method is proposed. This method uses the coherence of the line spectrum and the non-coherence of the continuum spectrum noise. Compared with the two methods, the SHCS method has its own advantages. It is suitable for extremely low SNR conditions where the line spectrum is almost submerged in noise. When there are multiple line spectra in the power spectrum, after SHCS processing, the gains obtained by the strong and weak line spectrum are basically same. This method divides the received signal into segments in the time domain, letting the segment from 1 to n be signal 1 and the segment from (1 + m) to (n + m) be signal m, where is the offset. In addition, this approach uses the Welch method to calculate the cross-power spectrum of signal 1 and signal m. After the offset of m, the line spectrum is still coherent, and the continuous spectrum noise is incoherent between signal 1 and signal m. Therefore, the level of the line spectrum on the calculated cross-power spectrum is basically unchanged, and the level of the continuous spectrum noise decreases, thus improving the SNR of the line spectrum.
The contributions of this paper are as follows:
(1) We propose the SHCS method based on time-domain coherence. This method uses the coherence of the line spectrum and the non-coherence of the continuous spectrum noise to obtain coherent gain and improve the SNR of the line spectrum.
(2) The CW signal is used to simulate line spectrum in ship radiated noise, the effects of the input SNR, the number of averaging operations, and the overlap ratio on the performance of the SHCS method under a background of Gaussian white noise were analyzed.
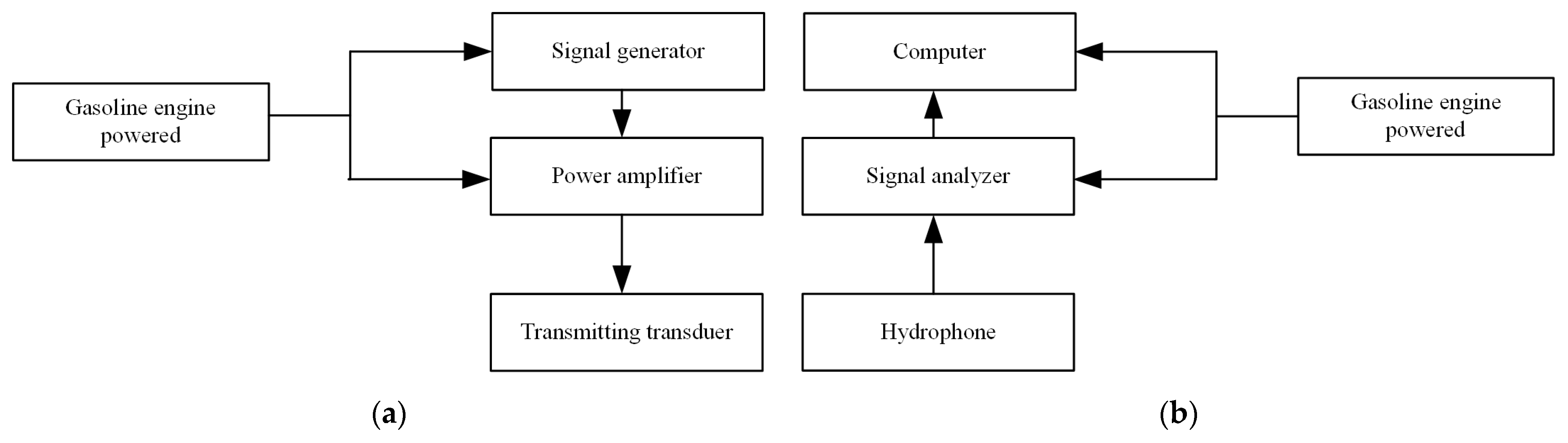
(3) We use the SHCS method to process the CW signals propagating in a long distance in the actual marine environment and the line spectrum signals of sailing cargo ships. The experimental results show that under the condition of an extremely low input SNR (In-band SNR < 3 dB), the proposed SHCS method have a good performance and a coherence gain of about 10 dB can be obtained. The processing results of the radiated noise of sailing cargo ships also prove the effectiveness of SHCS.
(4) Compared with the array signal processing method, the SHCS method improves the detection capability of a small underwater platform and results in better detection and observation of industrial devices in the ocean such as ships. This method is suitable for observing not only ship-radiated noise but also any signal in the ocean with line-spectrum characteristics.
The remainder of this paper is structured as follows. The theoretical approach is described in
Section 2. The simulation results and experimental results are presented in
Section 3. The Discussion is presented in
Section 4. Finally, the conclusions obtained during the study are given in
Section 5.
2. Methods
In the SHCS method, we first need to segment the received signal. The segmentation process is shown in
Figure 1, in which
is the signal received by the single hydrophone,
and
(
) can be regarded as two received signal channels after segmentation.
In general, the received signals
and
can be expressed as:
where
and
are the line spectrum,
and
are the continuous spectrum noise. The auto-power spectrum of the two signals is, respectively, defined as:
For convenience, Equations (2) and (3) can be abbreviated as:
The cross-power spectrum of the two signals can be defined as:
where
,
,
,
,
, and
are the Fourier transforms of
,
,
,
,
, and
, respectively, and * represents the complex conjugate. For convenience, Equation (6) can be abbreviated as:
Coherent averaging of
calculated for different segments gives us:
For the
and
signals, the formula for calculating the coherence coefficient is:
Substituting Equation (9) into Equation (8), we obtain:
where
is the coherence coefficient of the line spectrum in the two received signals,
is the coherence coefficient of the continuum noise in the two received signals, and
and
represent the average power spectrum of the line spectrum and the continuum noise, respectively. Before the SHCS processing, the input SNR (the original power-spectrum SNR) can be defined as:
After SHCS processing, the SNR becomes:
After the signal received by the single hydrophone is divided into signal 1 and signal m, the coherence coefficient of the line spectrum in the two signals is much larger than the coherence coefficient of the continuous spectrum noise; that is, . Therefore, the SNR of the line spectrum is improved and the gain obtained by the SHCS method on the original power spectrum can be expressed as .
When
m takes different values, an SHCS matrix
P can be constructed, in which different columns represent the SHCS results under different offsets
m:
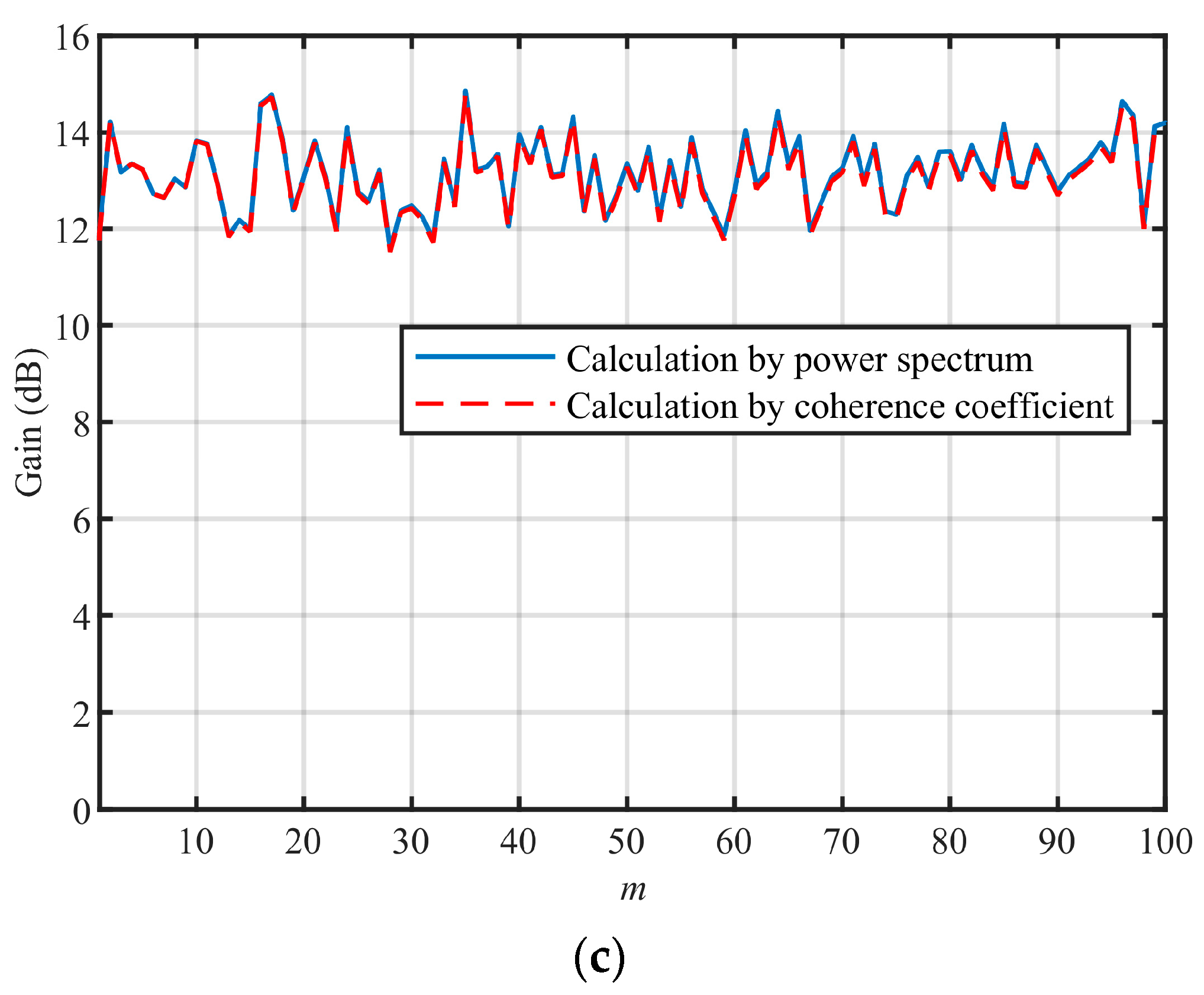
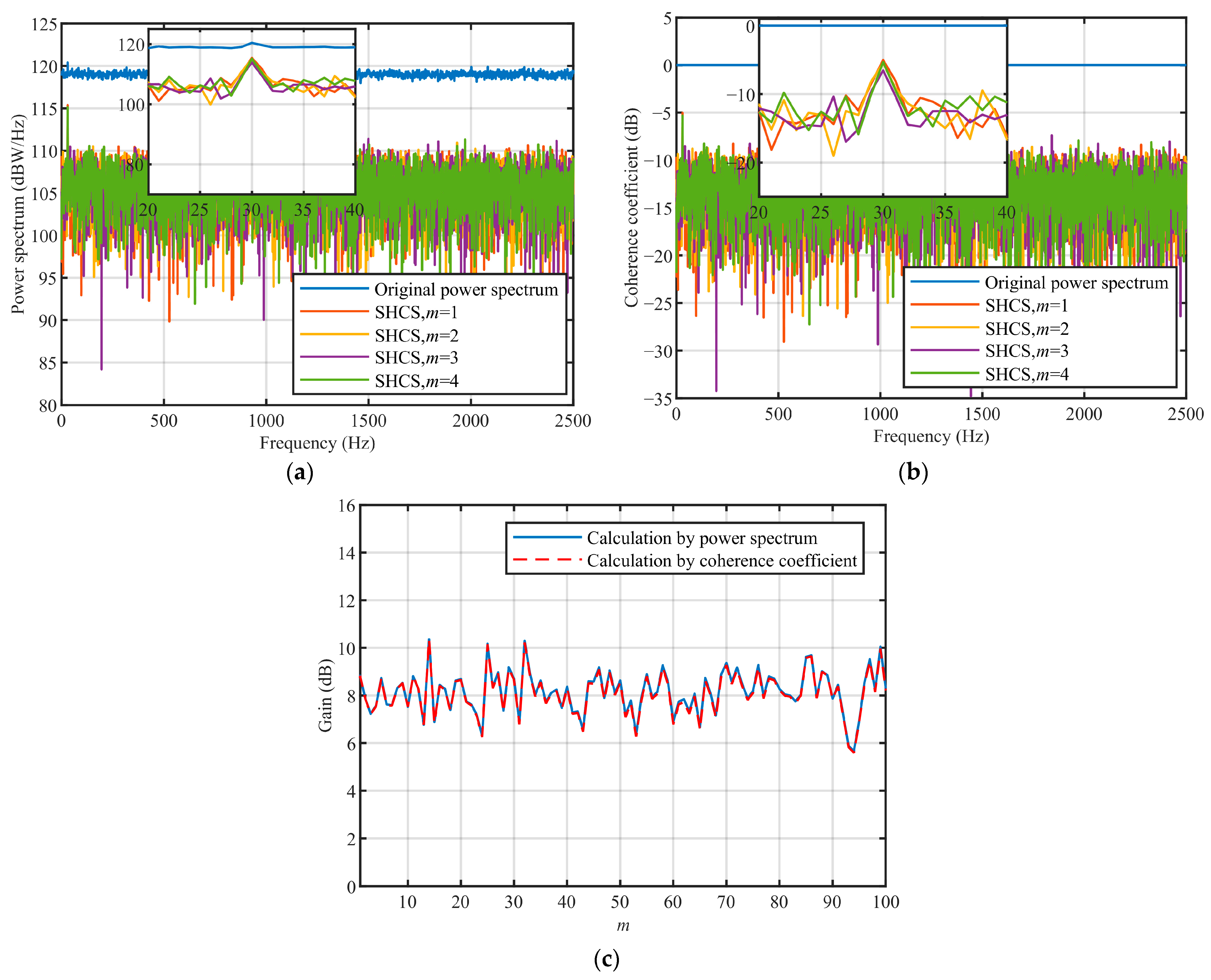
When
m takes different values, the gain
G obtained by the SHCS is:
Through theoretical derivation, it can be found that the origin of the gain of the SHCS is mainly the coherence of the line spectrum in signal 1 and signal m and the non-coherence of the continuum noise.
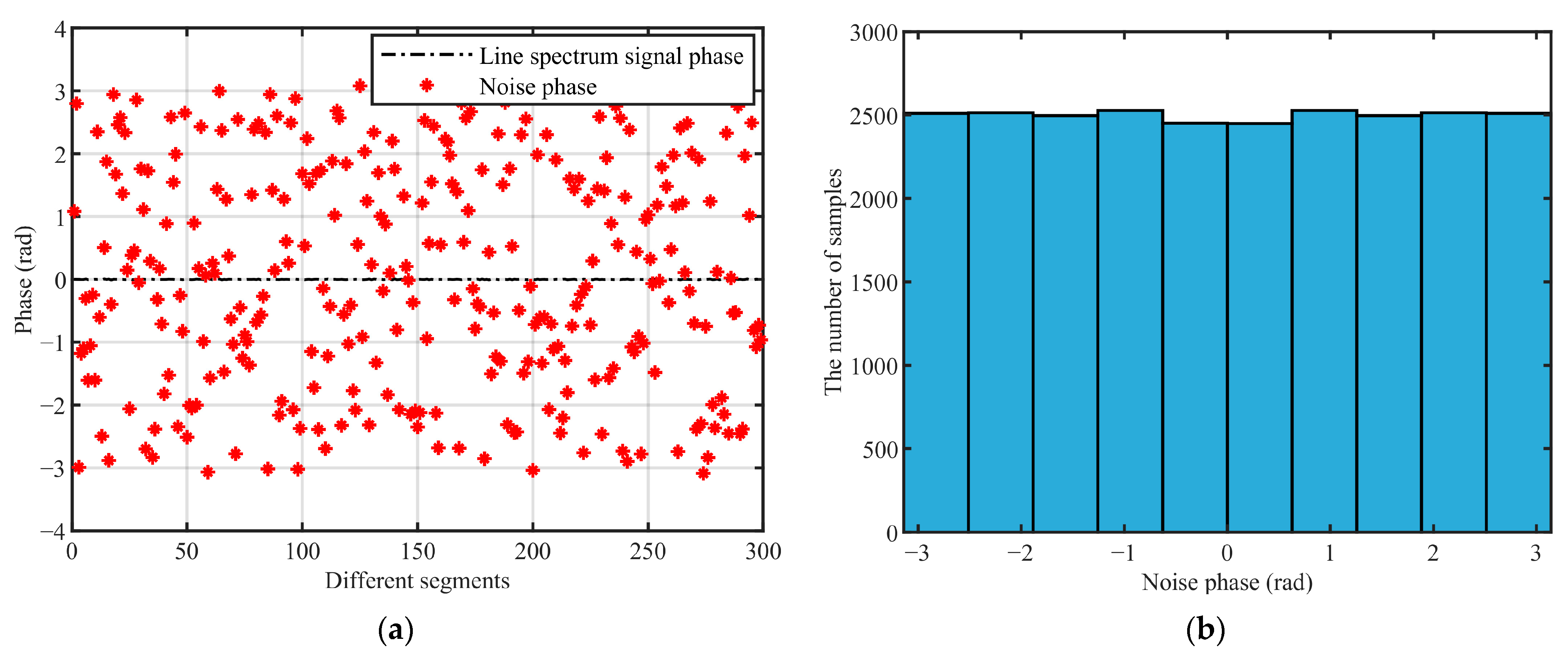
In the process of obtaining the cross-power spectrum between signal 1 and signal
m, the cross-power spectrum
corresponding to different segments are obtained, and then coherent averaging is used in Equation (8). Due to the coherence of the line spectrum, the phase of
obtained from different segments will be constant, while the continuous spectrum noise will be incoherent; the phase of
obtained from different segments will obey a uniform distribution of
. In the coherent averaging process, the line spectrum is unchanged, the noise is canceled, and the coherent gain is obtained (see
Appendix A for the coherent averaging process).
4. Discussion
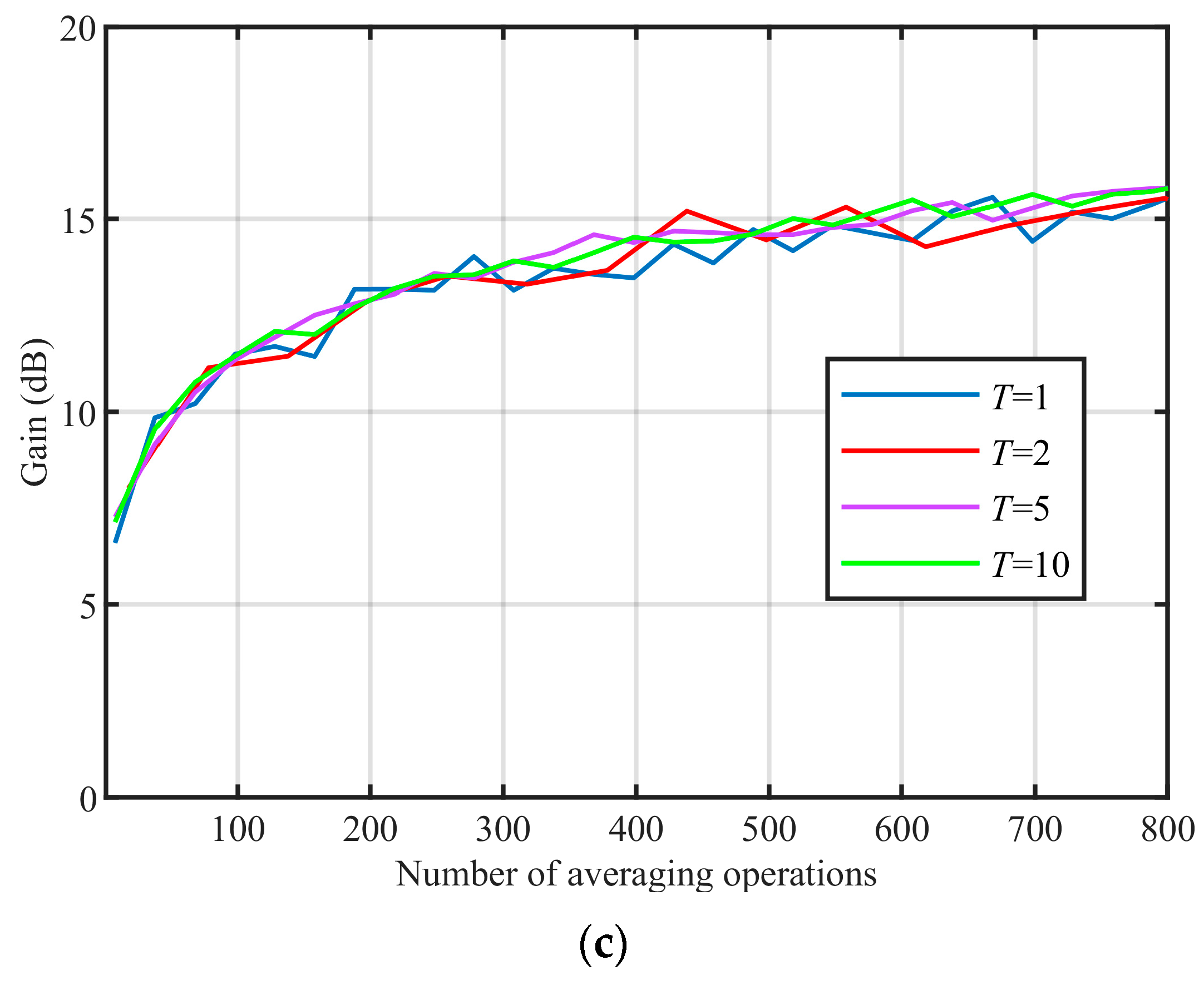
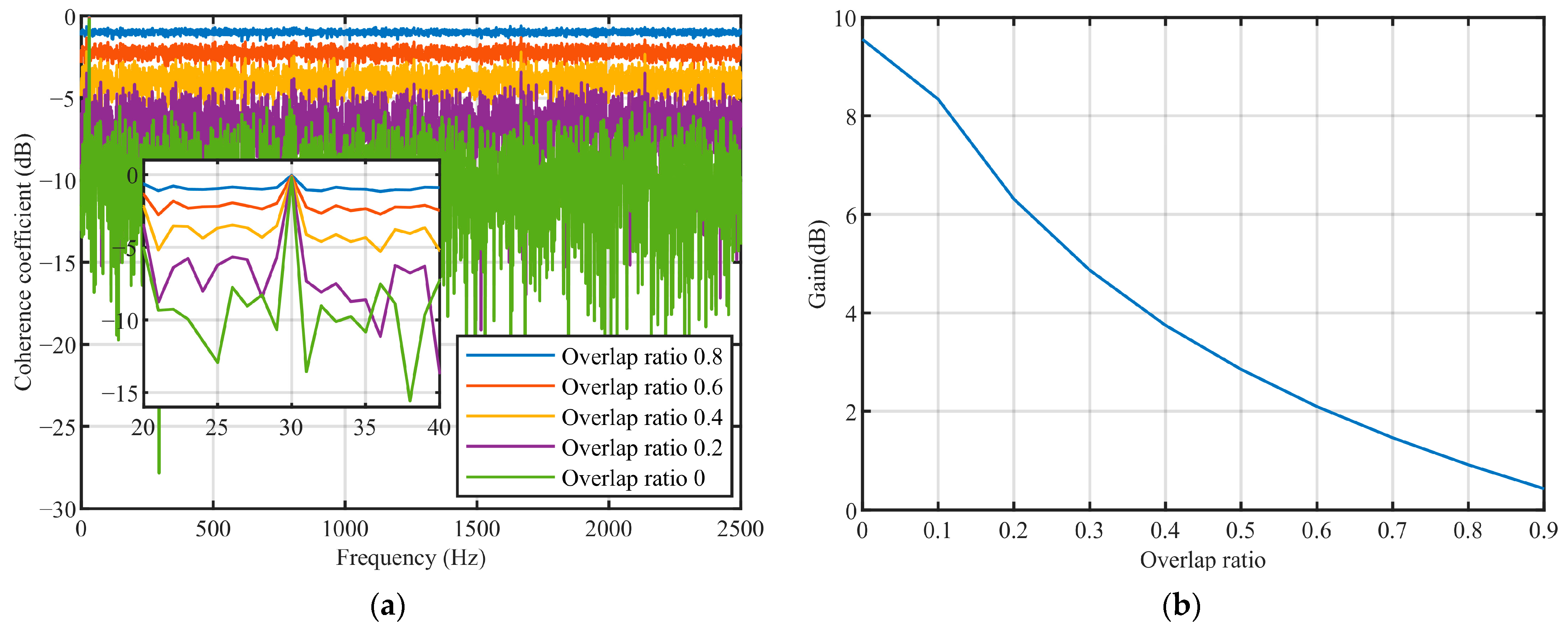
Simulation results show that the SHCS method has excellent performance under the different input SNR conditions. When the overlap ratio is 0 and m = 1, the noise coherence coefficient decreases to a minimum and no additional gain can be obtained by continuing to increase m. The gain obtained by the SHCS method increases with the increase in the number of averaging operations and gradually tends to a stable value. With the increase in overlap ratio, the coherence coefficient of the noise increases, the coherence coefficient of the line spectrum does not change, and the gain obtained by the SHCS method decreases.
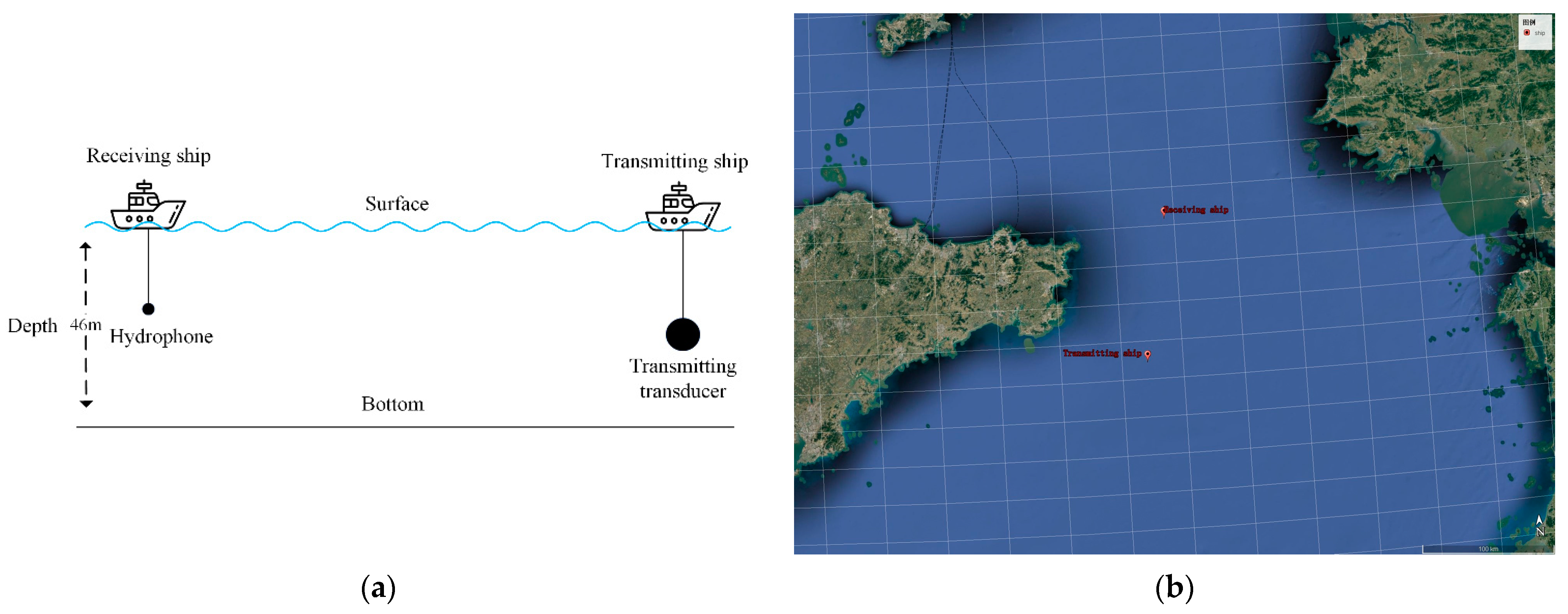
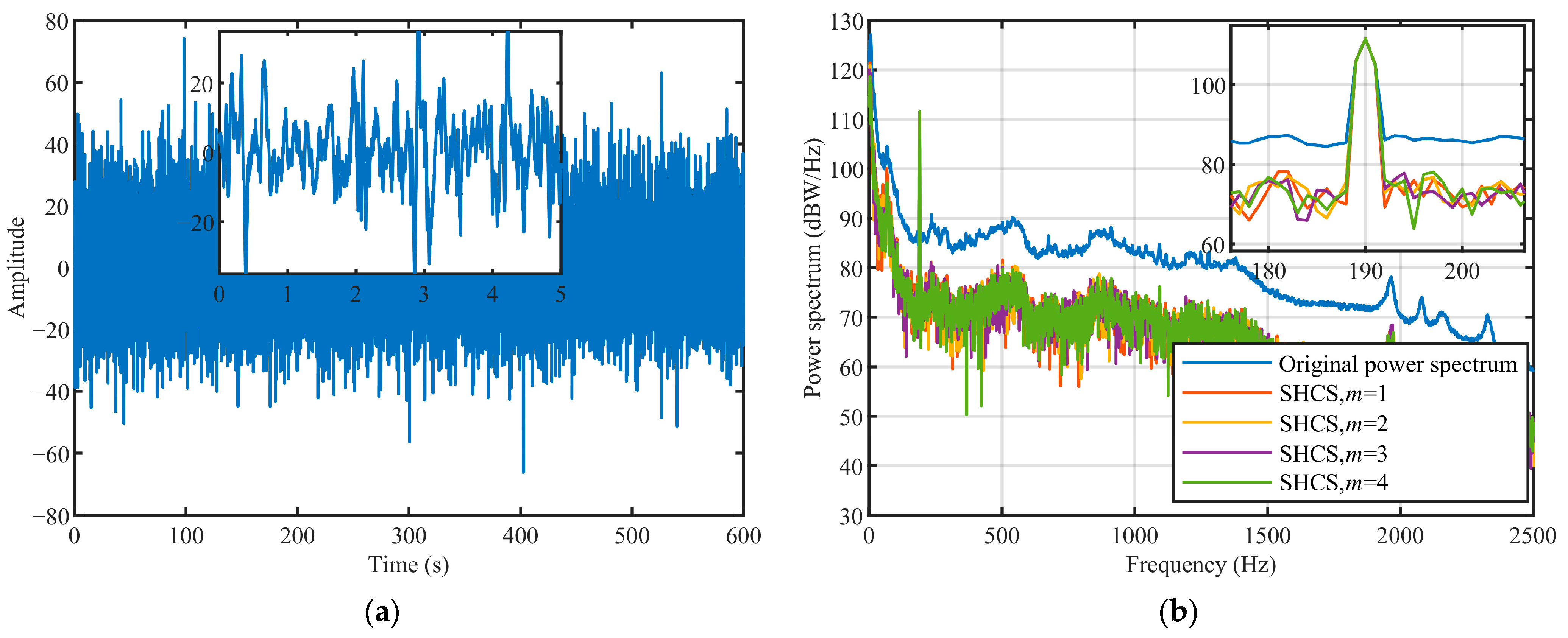
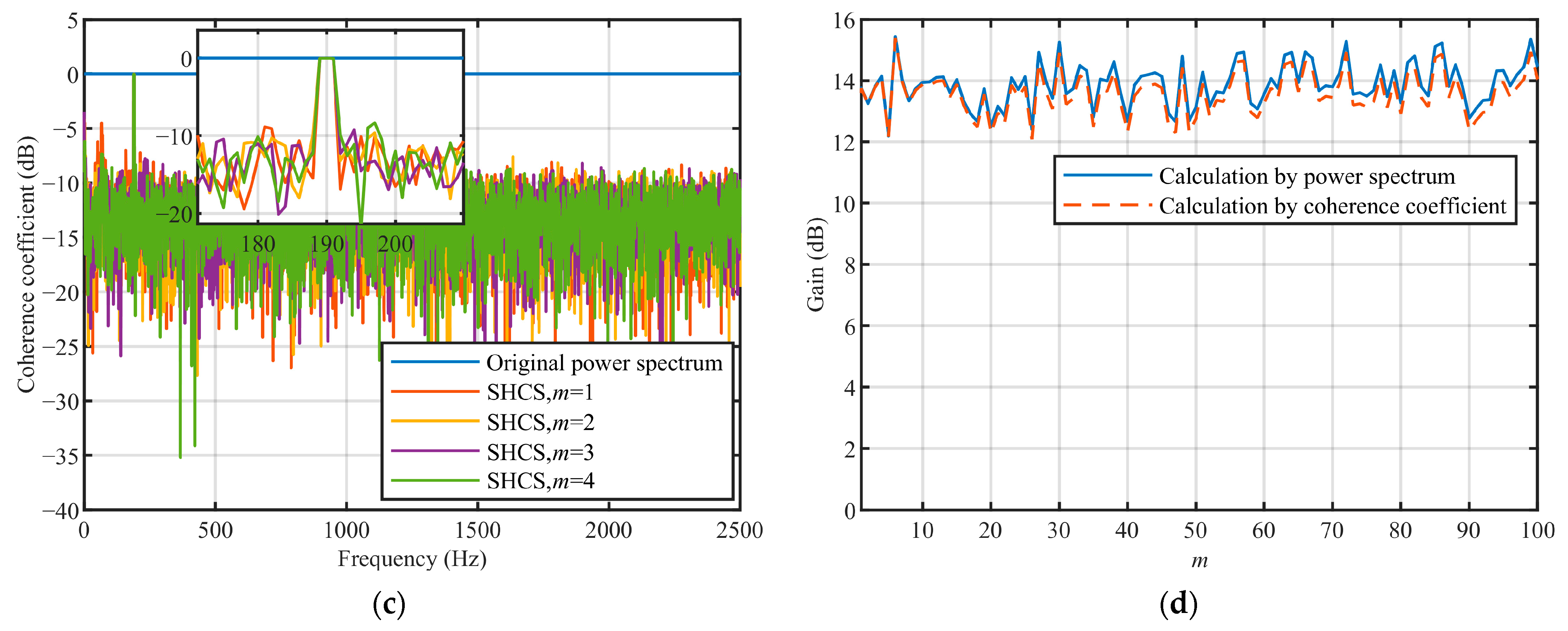
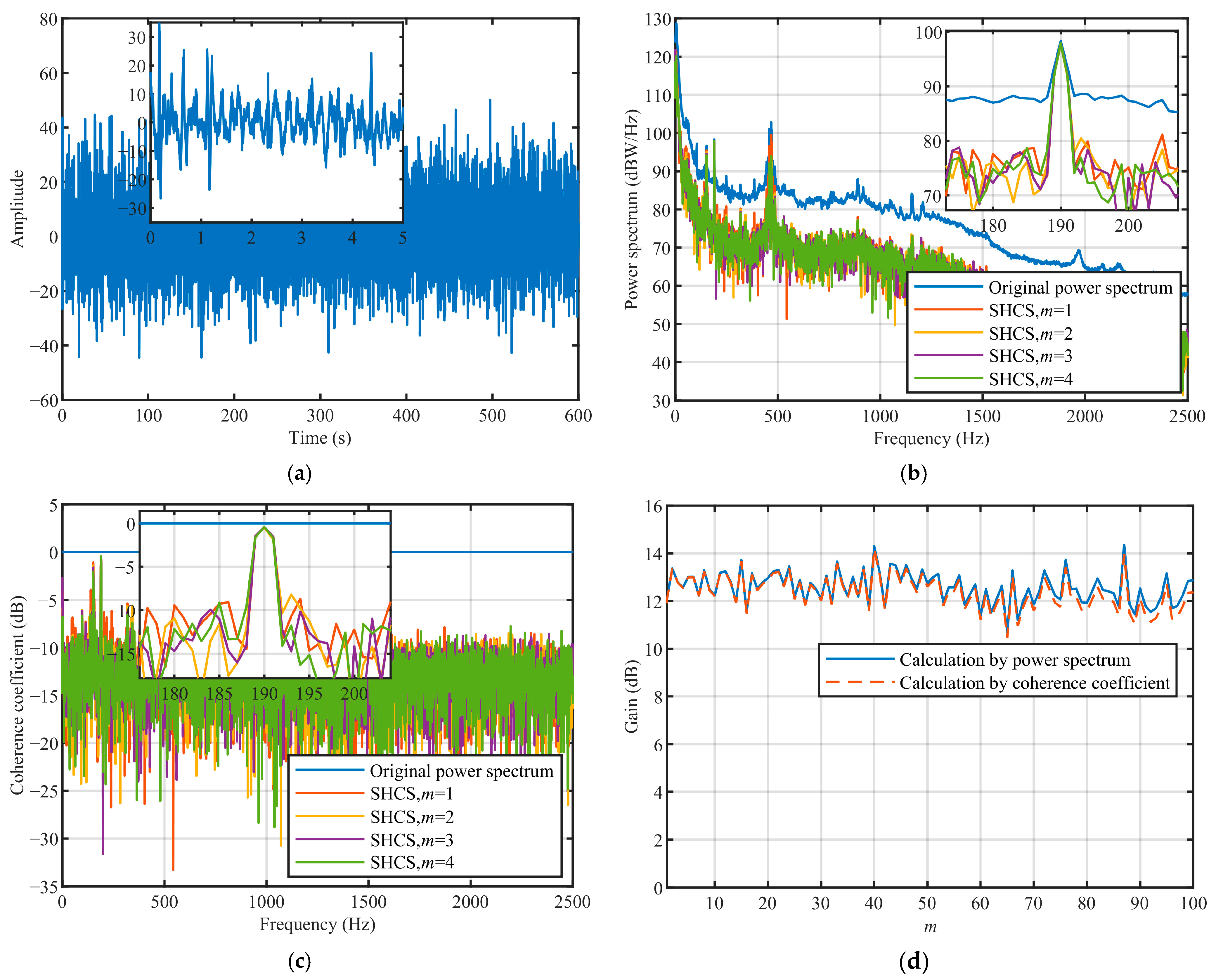
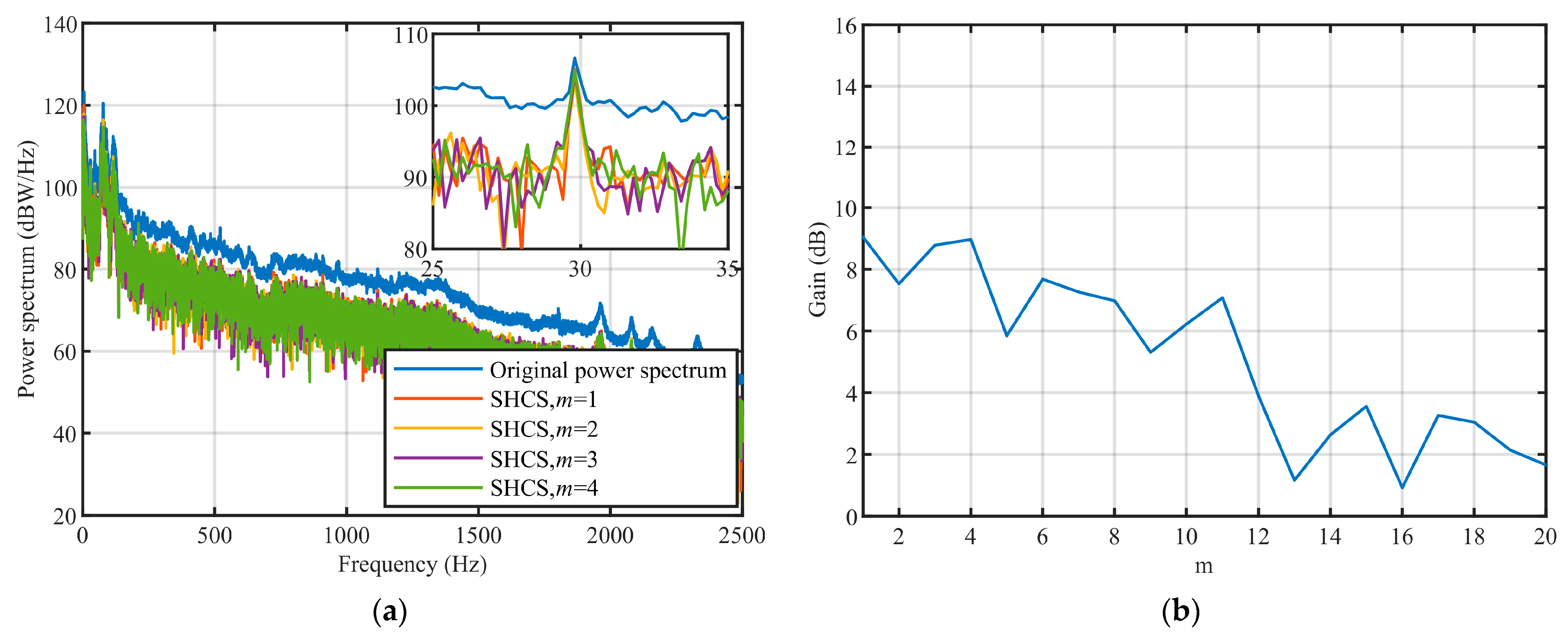
Experimental results show that the SHCS method has excellent performance in actual marine environments. Under the extremely low input SNR, in which the line spectrum was almost completely submerged in the marine environmental noise, the SHCS method was found to obtain a coherence gain of about 10 dB. Under the conventional input SNR, in which the line spectrum could be observed, the SHCS method was found to obtain a coherence gain of about 13 dB. The results of processing the radiated noise from an actual cargo ship also demonstrate the effectiveness of the SHCS method.
Our study shows that the SHCS method has excellent performance and can significantly improve the SNR of weak line spectrum. The SHCS method improves the line spectrum SNR through the coherence of the signal and the non-coherence of the noise, which is essentially different from the background equalization and ALE method. The background equalization technology [
15,
16,
17,
18] is based on the difference between the signal and the noise amplitude. This technology sets an appropriate threshold, filters the signal, and filters out the background noise and protects the signal. However, at low SNR, where the signal is almost buried in the noise, background equalization techniques usually work poorly. The ALE method [
22,
23,
24,
25,
26,
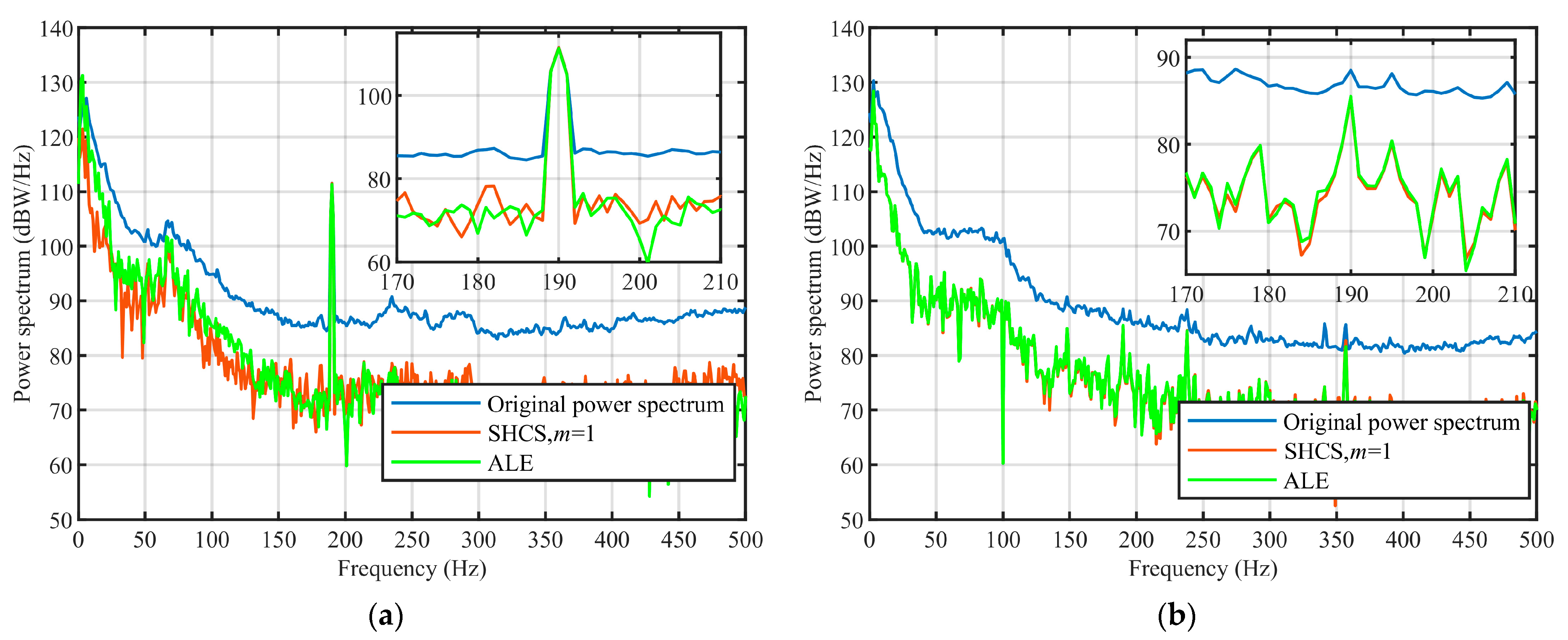
27] is an essentially adaptive filter that enhances the signal by self-adjusting the errors between the desired signal and the output signal, but the method converges slowly under low SNR. Moreover, when there are multiple line spectra in the frequency spectrum, the enhancement range of the weak line spectrum is smaller than that of the strong line spectrum. Next, the SHCS method and ALE method were used to process experimental data, respectively, and the results are shown in
Figure 12. The results show that the SHCS method, as a new method, can achieve roughly the same gain as the ALE method and can significantly improve the line spectrum SNR. Compared with the ALE method, the SHCS method has its own advantages. It can quickly process signals with different SNR when there are multiple line spectra in the power spectrum and after SHCS processing, the strong and weak line spectrum obtained basically same gains.
After SHCS processing, the detection range of passive sonar is improved and this increases the ability of small-sized platforms to observe surface ships and underwater submarines in the ocean at long distances. The SHCS method is suitable for observing not only radiated ship noise but also any signals with line-spectrum characteristics. In future work, we hope to use the SHCS method to observe other industrial activities in the ocean, and we hope that it can be applied to a vector hydrophone.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















