

Clutter Covariance Matrix Estimation for Radar Adaptive Detection Based on a Complex-Valued Convolutional Neural Network


Abstract
:1. Introduction
- A CV covariance matrix estimation network (CVCENet) is proposed to estimate the clutter covariance matrix. Moreover, an RV natural competitor named RVCENet is constructed with the same framework as the CVCENet.
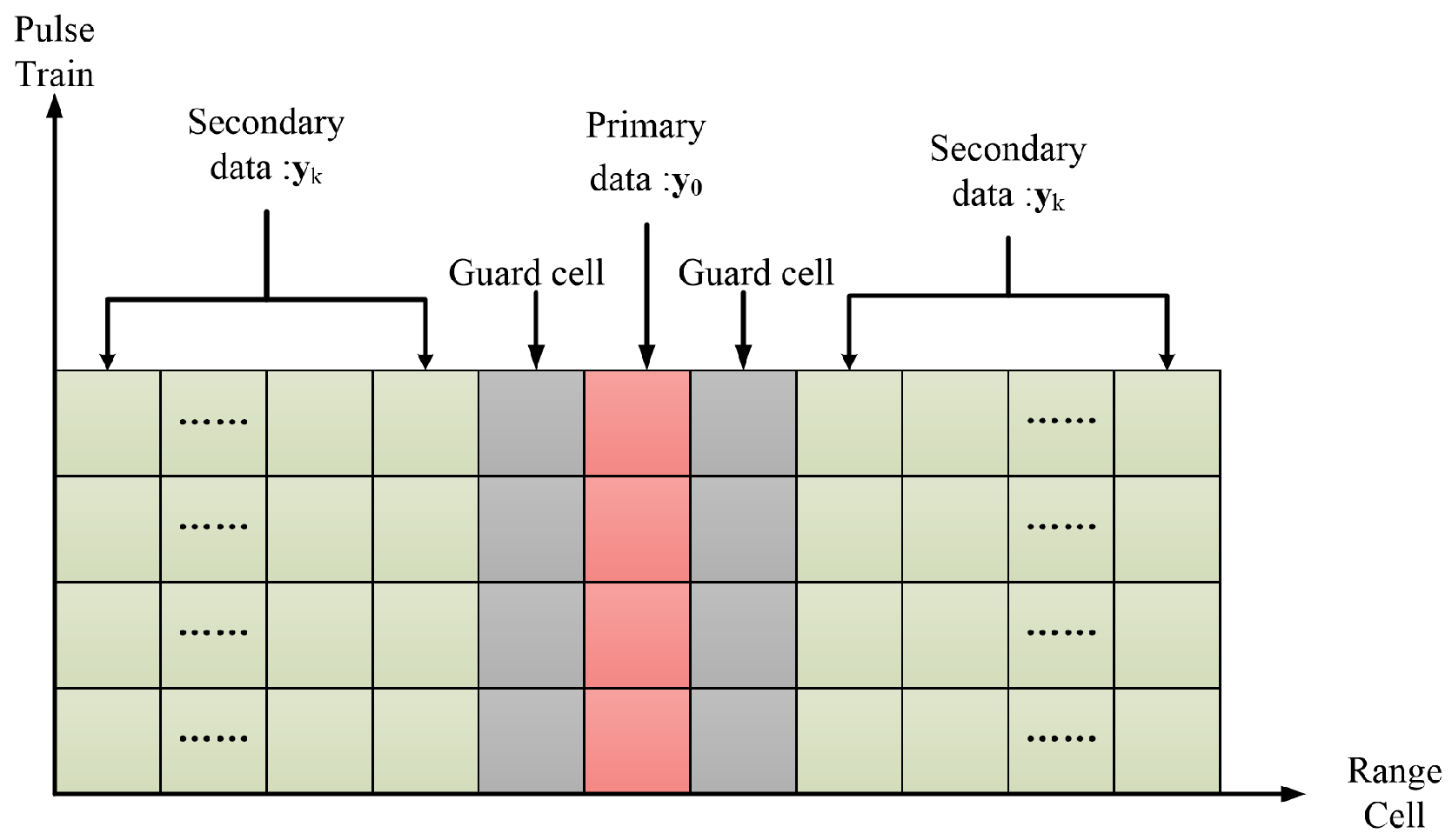
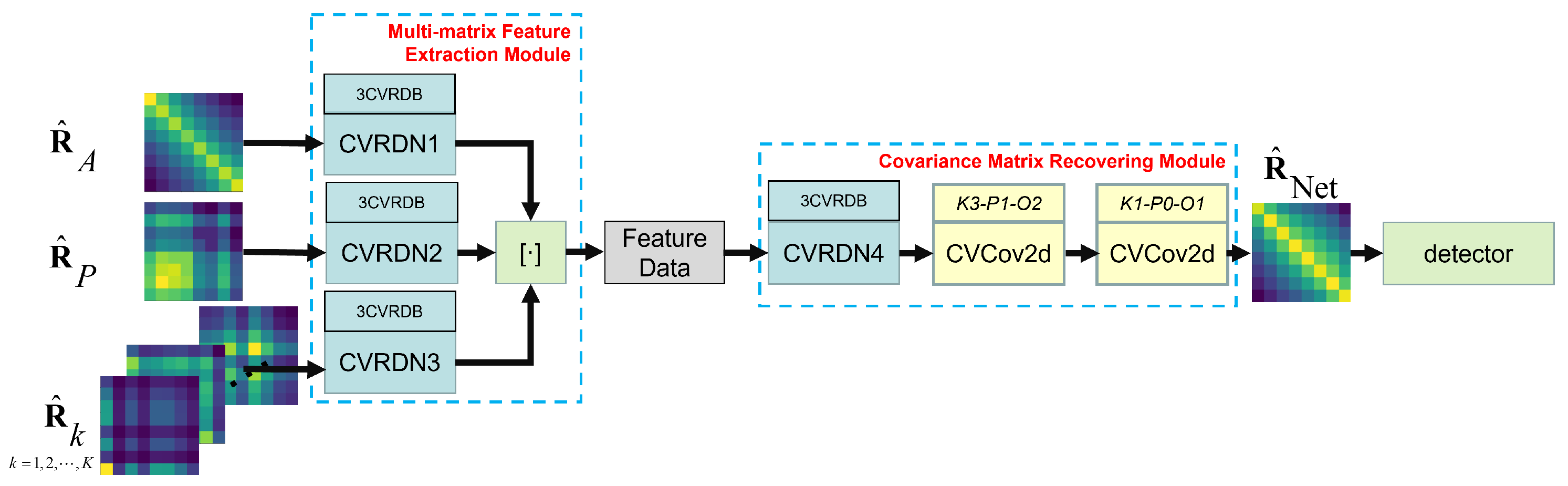
- Multiple data resources are exploited from three input channels in the network, including the primary data, secondary data, and regularization data, to raise the estimation accuracy of the clutter covariance matrix. The obtained estimation of the clutter covariance matrix is applied to the ANMF detector for target detection.
- Performance assessment is gained via both simulated and real sea clutter, illustrating the effectiveness and advancement of the estimator via CVCENet, compared with RVCENet and traditional model-based covariance matrix estimators.
2. Problem Formulation
3. Covariance Matrix Estimation Network
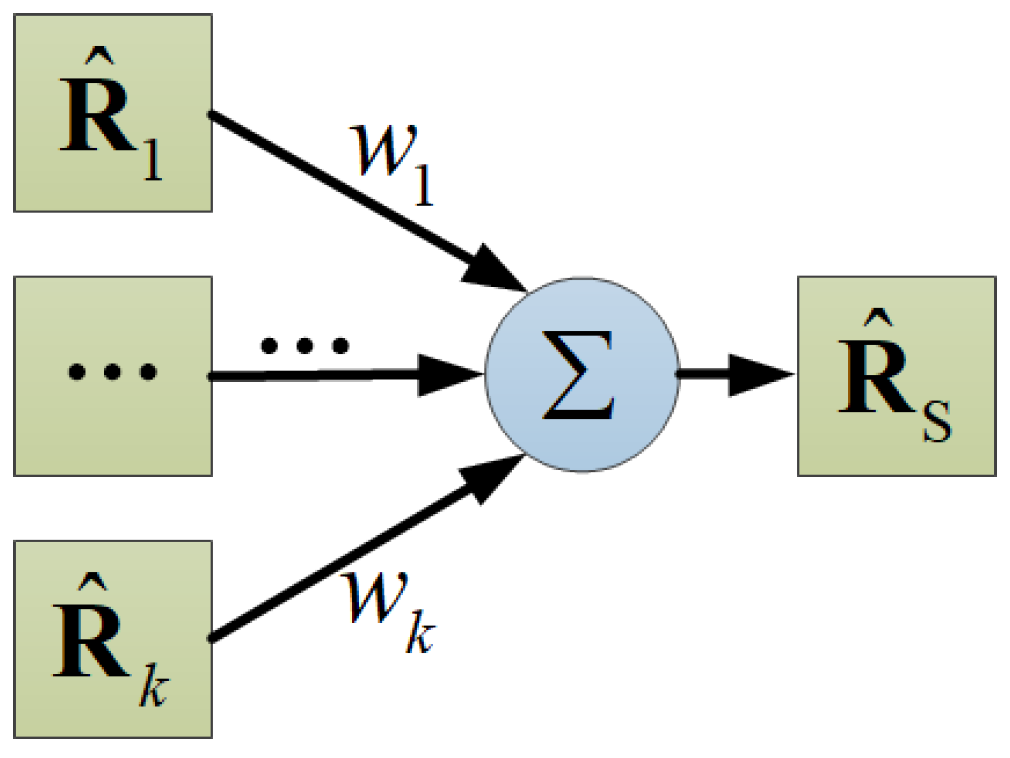
3.1. Linear Covariance Matrix Estimator
3.2. CVCENet
3.3. Training Process
3.3.1. Simulated Data Configuration
3.3.2. Training Process Description
4. Experimental Results and Analysis
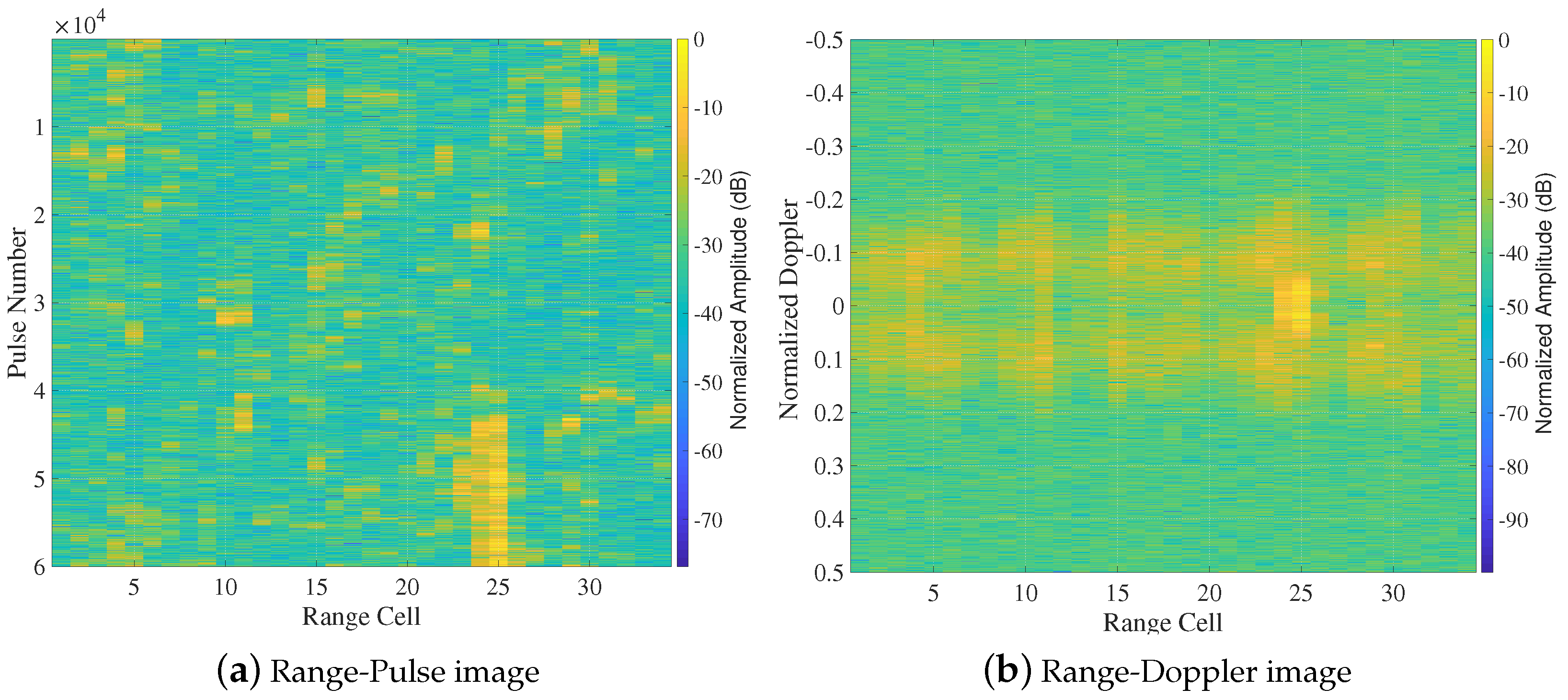
4.1. Measured Data Configuration
4.2. Experimental Results
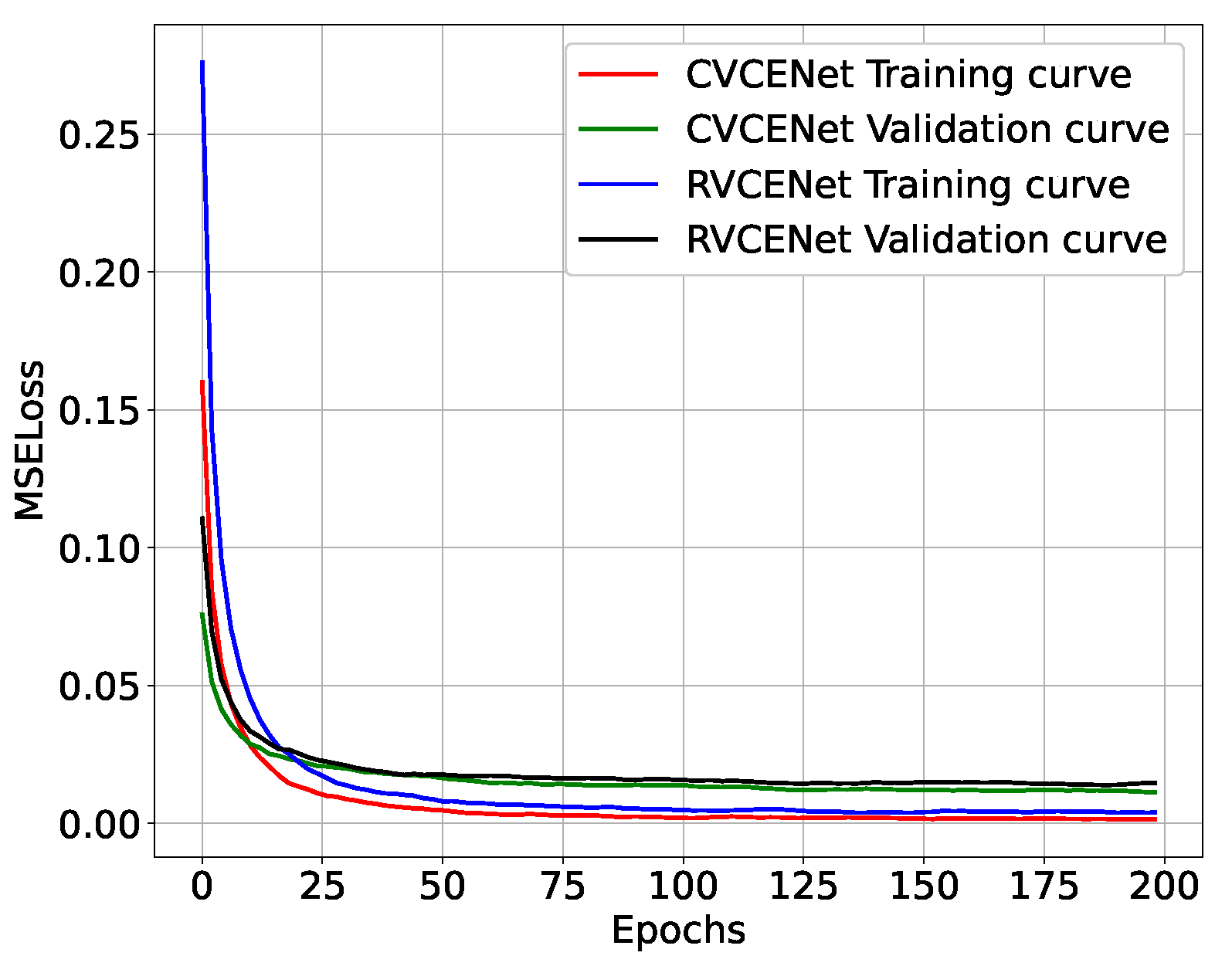
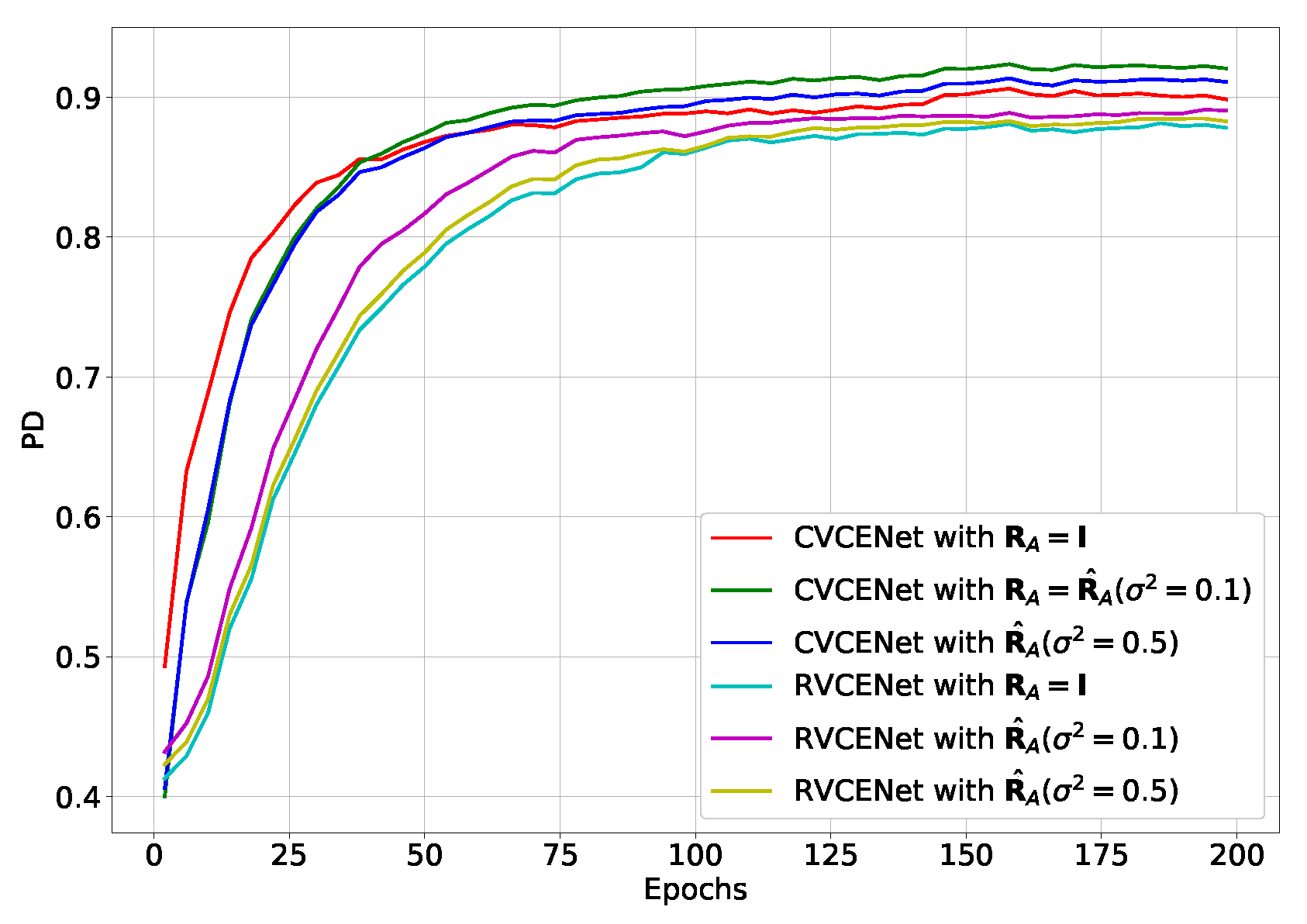
4.2.1. Training Results
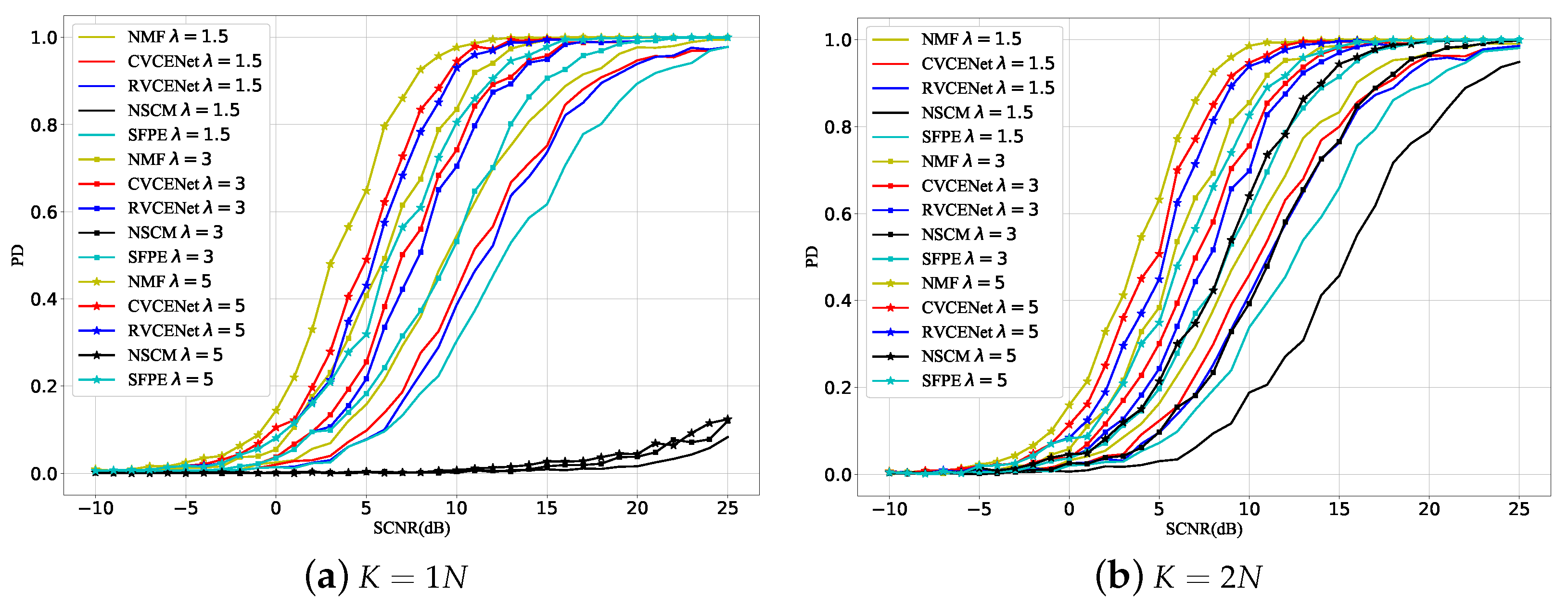
4.2.2. Detection Results with Simulated Data
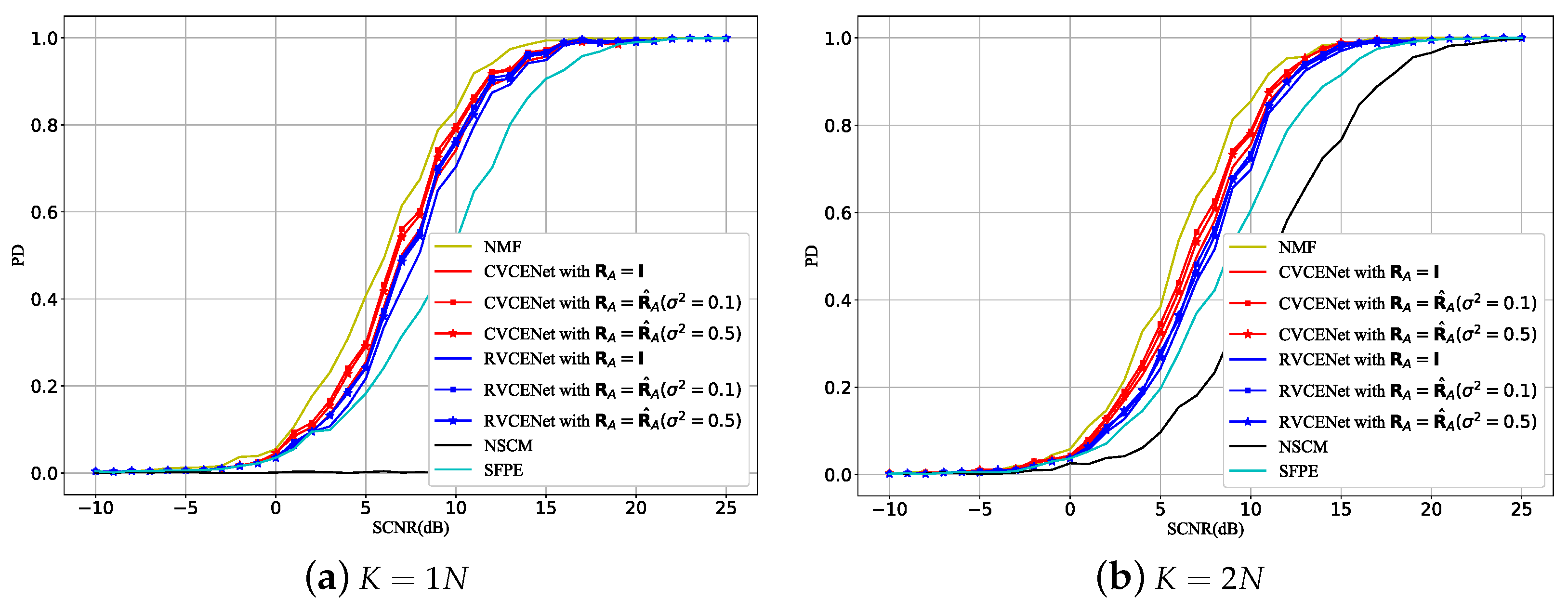
4.2.3. Detection Results with IPIX Radar Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Conte, E.; De Maio, A. Mitigation techniques for non-Gaussian sea clutter. IEEE J. Ocean. Eng. 2004, 29, 284–302. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Liu, J. Persymmetric Detection of Radar Targets in Nonhomogeneous and Non-Gaussian Sea Clutter. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–9. [Google Scholar] [CrossRef]
- Brennan, L.; Reed, L. Theory of Adaptive Radar. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 237–252. [Google Scholar] [CrossRef]
- Ward, J. Space-time adaptive processing for airborne radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing, London, UK, 6 April 1998; pp. 2/1–2/6. [Google Scholar]
- Goodman, N.R. Statistical Analysis Based on a Certain Multivariate Complex Gaussian Distribution (An Introduction). Ann. Math. Stat. 1963, 34, 152–177. [Google Scholar] [CrossRef]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background—Part I: Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2345–2357. [Google Scholar] [CrossRef]
- Kelly, E. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef]
- Gini, F.; Farina, A. Vector subspace detection in compound-Gaussian clutter. Part I: Survey and new results. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1295–1311. [Google Scholar] [CrossRef]
- Gini, F.; Farina, A.; Montanari, M. Vector subspace detection in compound-Gaussian clutter, part II: Performance analysis. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1312–1323. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Ovarlez, J.P.; Forster, P.; Larzabal, P. Covariance Structure Maximum-Likelihood Estimates in Compound Gaussian Noise: Existence and Algorithm Analysis. IEEE Trans. Signal Process. 2007, 56, 34–48. [Google Scholar] [CrossRef]
- Gini, F.; Michels, J.H. Performance analysis of two covariance matrix estimators in compound-Gaussian clutter. IEE Proc.—Radar Sonar Navig. 2002, 146, 133–140. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M. Covariance matrix estimation for CFAR detection in correlated heavy tailed clutter. Signal Process. 2002, 82, 1847–1859. [Google Scholar] [CrossRef]
- Conte, E.; Lops, M.; Ricci, G. Adaptive detection schemes in compound-Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1058–1069. [Google Scholar] [CrossRef]
- Chen, Y.; Wiesel, A.; Hero Alfred, O.I. Robust Shrinkage Estimation of High-Dimensional Covariance Matrices. IEEE Trans. Signal Process. 2011, 59, 4097–4107. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Quek, Y. Generalized Robust Shrinkage Estimator and Its Application to STAP Detection Problem. IEEE Trans. Signal Process. 2013, 62, 5640–5651. [Google Scholar] [CrossRef]
- Kammoun, A.; Couillet, R.; Pascal, F.; Alouini, M.S. Optimal Design of the Adaptive Normalized Matched Filter Detector using Regularized Tyler Estimators. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 755–769. [Google Scholar] [CrossRef]
- Stoica, P.; Li, J.; Zhu, X.; Guerci, J.R. On Using a priori Knowledge in Space-Time Adaptive Processing. IEEE Trans. Signal Process. 2008, 56, 2598–2602. [Google Scholar] [CrossRef]
- Riedl, M.; Potter, L.C. Multimodel Shrinkage for Knowledge-Aided Space-Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2601–2610. [Google Scholar] [CrossRef]
- Zhu, X.; Li, J.; Stoica, P. Knowledge-Aided Space-Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1325–1336. [Google Scholar] [CrossRef]
- Shang, Z.; Huo, K.; Liu, W.; Sun, Y.; Wang, Y. Knowledge-aided covariance estimate via geometric mean for adaptive detection. Digit. Signal Process. 2020, 97, 102616. [Google Scholar] [CrossRef]
- Krichen, M. Convolutional Neural Networks: A Survey. Computers 2023, 12, 151. [Google Scholar] [CrossRef]
- Alahmari, F.; Naim, A.; Alqahtani, H. E-Learning Modeling Technique and Convolution Neural Networks in Online Education; River Publishers: Aalborg, Denmark, 2022; pp. 261–296. [Google Scholar] [CrossRef]
- Duan, K.; Chen, H.; Xie, W.; Wang, Y. Deep learning for high-resolution estimation of clutter angle-Doppler spectrum in STAP. IET Radar Sonar Navig. 2022, 16, 193–207. [Google Scholar] [CrossRef]
- Wang, J.; Li, S. Maritime Radar Target Detection in Sea Clutter Based on CNN with Dual-Perspective Attention. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Feintuch, S.; Permuter, H.H.; Bilik, I.; Tabrikian, J. Neural Network-Based Multitarget Detection within Correlated Heavy-Tailed Clutter. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5684–5698. [Google Scholar] [CrossRef]
- Jiang, W.; Haimovich, A.M.; Govoni, M.; Garner, T.; Simeone, O. Fast Data-Driven Adaptation of Radar Detection via Meta-Learning. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021. [Google Scholar]
- Pan, M.; Chen, J.; Wang, S.; Dong, Z. A Novel Approach for Marine Small Target Detection Based on Deep Learning. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019. [Google Scholar]
- Jarabo-Amores, M.-P.; David de la Mata-Moya, R.G.P.; Rosa-Zurera, M. Radar detection with the Neyman–Pearson criterion using supervised-learning-machines trained with the cross-entropy error. EURASIP J. Adv. Signal Process. 2013, 2013, 44. [Google Scholar] [CrossRef]
- Su, N.; Chen, X.; Jian, G.; Li, Y. Deep CNN-Based Radar Detection for Real Maritime Target Under Different Sea States and Polarizations. In Proceedings of the 3rd International Conference on Cognitive Systems and Information Processing, Singapore, 27 April 2019. [Google Scholar]
- López-Risueño, G.; Grajal, J.; Haykin, S.; Díaz-Oliver, R. Convolutional Neural Networks for Radar Detection. Lect. Notes Comput. Sci. 2002, 2415, 1150–1155. [Google Scholar]
- Hirose, A. Complex-valued neural networks: The merits and their origins. In Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009; pp. 1237–1244. [Google Scholar] [CrossRef]
- Fuchs, A.; Rock, J.; Toth, M.; Meissner, P.; Pernkopf, F. Complex-valued Convolutional Neural Networks for Enhanced Radar Signal Denoising and Interference Mitigation. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Shang, Z.; Li, X.; Liu, Y.; Wang, Y.; Liu, W. GLRT detector based on knowledge aided covariance estimation in compound Gaussian environment. Signal Process. 2019, 155, 377–383. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Hao, C.; Gao, Y.; Wang, Y. Multichannel adaptive signal detection: Basic theory and literature review. Sci. China Inf. Sci. 2022, 65, 1–40. [Google Scholar] [CrossRef]
- Bassey, J.; Qian, L.; Li, X. A Survey of Complex-Valued Neural Networks. arXiv 2021, arXiv:2101.12249. [Google Scholar]
- Mu, H.; Zhang, Y.; Jiang, Y.; Ding, C. CV-GMTINet: GMTI Using a Deep Complex-Valued Convolutional Neural Network for Multichannel SAR-GMTI System. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Bidon, S.; Besson, O.; Tourneret, J.Y. Knowledge-Aided STAP in Heterogeneous Clutter using a Hierarchical Bayesian Algorithm. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1863–1879. [Google Scholar] [CrossRef]
- van der, M.; Kilian, Q.; Weinberger, G.H.L.P. Convolutional Networks with Dense Connectivity. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 44, 8704–8716. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Kang, N.; Shang, Z.; Du, Q. Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection. Sensors 2019, 19, 664. [Google Scholar] [CrossRef] [PubMed]
- Gini, F. Sub-optimum coherent radar detection in a mixture of K-distributed and Gaussian clutter. IEE Proc.—Radar Sonar Navig. 2002, 144, 39–48. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.W.; Shui, P. Near-optimum coherent CFAR detection of radar targets in compound-Gaussian clutter with inverse Gaussian texture. Signal Process. 2020, 166, 107236. [Google Scholar] [CrossRef]
- Ollila, E.; Tyler, D.E.; Koivunen, V.; Poor, H.V. Compound-Gaussian Clutter Modeling with an Inverse Gaussian Texture Distribution. IEEE Signal Process. Lett. 2012, 19, 876–879. [Google Scholar] [CrossRef]
- Shang, Z.; Huo, K.; Liu, W.; Wang, Y.; Li, X. Interference Environment Model Recognition for Robust Adaptive Detection. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2850–2861. [Google Scholar] [CrossRef]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Conte, E.; Maio, A.D.; Galdi, C. Statistical analysis of real clutter at different range resolutions. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 903–918. [Google Scholar] [CrossRef]
- Maio, A.D.; Foglia, G.; Conte, E.; Farina, A. CFAR behavior of adaptive detectors: An experimental analysis. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 233–251. [Google Scholar] [CrossRef]
- Gurram, P.; Goodman, N. Spectral-domain covariance estimation with a priori knowledge. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1010–1020. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Value |
|---|---|
| batch size | 16 |
| number of samples of each epoch | 10,000 |
| number of epoch | 200 |
| learning rate | 0.001 |
| learning rate decay | 0.5 for every 50 epochs |
| optimizer | Adam |
| CVCENet |
|---|
| for epoch = 1:200 do |
| (1) Set (2) Set (3) Set (4) Set (5) Set (6) Generate according to Equations (11)–(13) for t = 1:10,000 do (1) Given , generate , according to Equation (10) (2) Given , generate according to Equation (9) (3) Generate and via and NSCM (4) Set a temporary random variable if Set else (1) Set in Equation (15) (2) Generate and obtain according to Equation (15) end if (5) Put the generated into the three input channels and obtain the output (6) Calculate L according to Equation (16) (7) Update via gradient descent optimization algorithms end for |
| end for |
| 19980223_170435_ANTSTEP.CDF | |
|---|---|
| Date and time (UTC) | 23 February 1998 17:04:35 |
| RF frequency | 9.39 GHz |
| Pulse length | 100 ns |
| Pulse repetition frequency | 1000 Hz |
| Radar azimuth angle | |
| Range | 3500–4000 m |
| Range resolution | 15 m |
| Radar beamwidth | |
| Method | Convergence Property | Data Resource | Detection Performance | ||
|---|---|---|---|---|---|
|
Primary
Data |
Regularization Data |
Insufficient Secondary Data |
PD Rank | ||
| CVCENet | Faster convergence than RVCENet | applied | applied | effective | 1 |
| RVCENet | Slower convergence than CVCENet | applied | applied | effective | 2 |
| NSCM [12] | Closed solution without convergence | not applied | not applied | noneffective | 4 |
| SFPE [15] | Closed solution without convergence | not applied | only unit matrix is applied | effective | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, N.; Shang, Z.; Liu, W.; Huang, X. Clutter Covariance Matrix Estimation for Radar Adaptive Detection Based on a Complex-Valued Convolutional Neural Network. Remote Sens. 2023, 15, 5367. https://doi.org/10.3390/rs15225367
Kang N, Shang Z, Liu W, Huang X. Clutter Covariance Matrix Estimation for Radar Adaptive Detection Based on a Complex-Valued Convolutional Neural Network. Remote Sensing. 2023; 15(22):5367. https://doi.org/10.3390/rs15225367
Chicago/Turabian StyleKang, Naixin, Zheran Shang, Weijian Liu, and Xiaotao Huang. 2023. "Clutter Covariance Matrix Estimation for Radar Adaptive Detection Based on a Complex-Valued Convolutional Neural Network" Remote Sensing 15, no. 22: 5367. https://doi.org/10.3390/rs15225367
APA StyleKang, N., Shang, Z., Liu, W., & Huang, X. (2023). Clutter Covariance Matrix Estimation for Radar Adaptive Detection Based on a Complex-Valued Convolutional Neural Network. Remote Sensing, 15(22), 5367. https://doi.org/10.3390/rs15225367