
Underwater Single-Photon Lidar Equipped with High-Sampling-Rate Multi-Channel Data Acquisition System

Abstract
:1. Introduction
2. Principle and Implementation of the MCAS
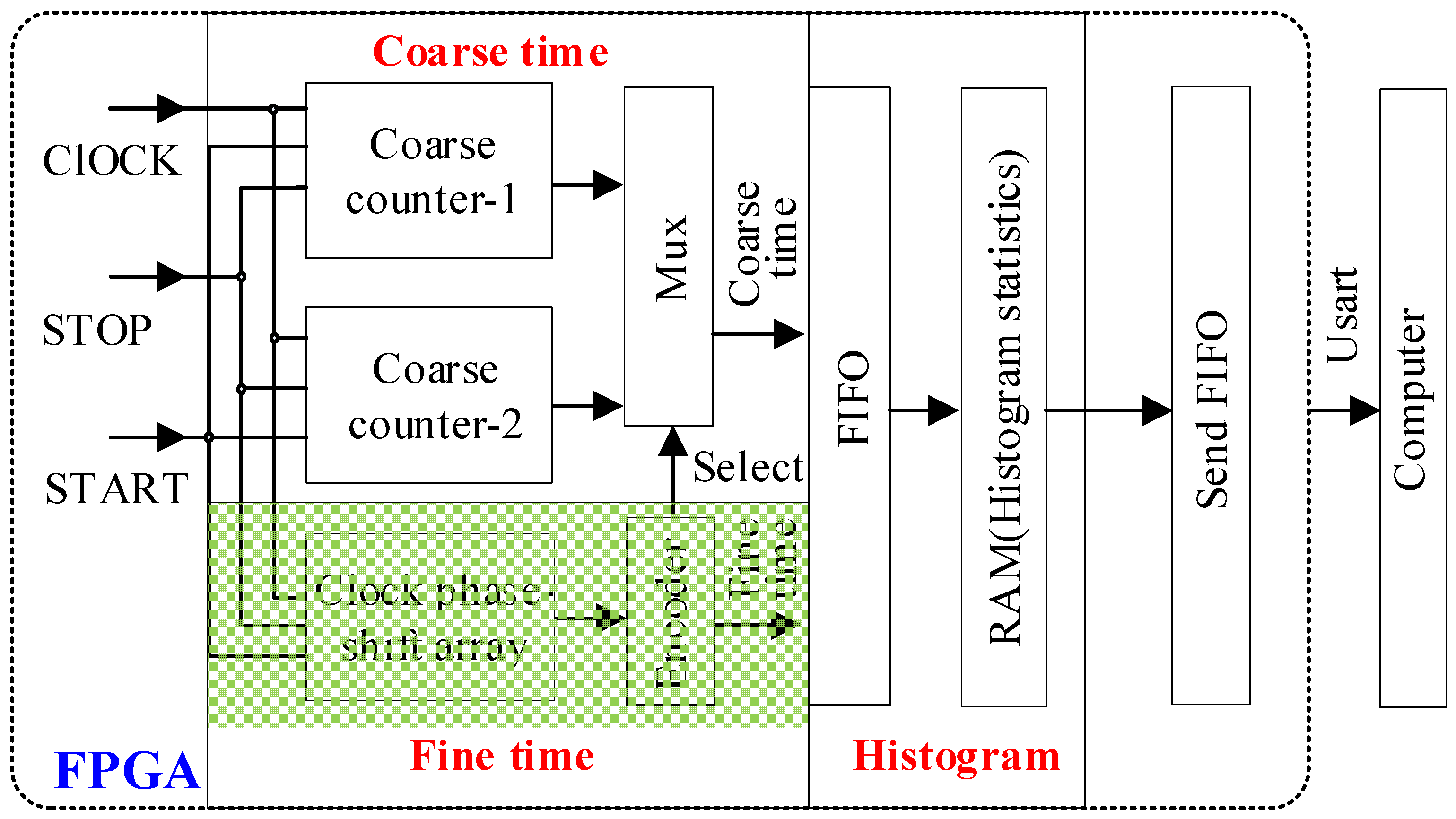
- Step 1:
- After powering on and initializing the MCAS, Coarse counter-1 and Coarse counter-2 count independently according to the rising and falling edges of the 200 MHz clock signal, respectively.
- Step 2:
- Upon receiving the synchronization signal (START), which represents the initiation time of the laser pulse emission, the fine time value of the fine time module and the coarse time value of the coarse time module are obtained and combined to form the time tags of START.
- Step 3:
- The same process is carried out for the stop signal (STOP), which indicates the recorded time of the detected event, specifically the arrival time of the lidar backscattered photon, to obtain the time tags of STOP.
- Step 4:
- The time tags of the STOP signal are subtracted from the time tags of the START signal, and the result is stored in a first in first out (FIFO) memory.
- Step 5:
- Steps 3 and 4 are repeated for each STOP signal until the START signal appears again, and then Step 2 is performed to update the time tags value of the original START signal.
- Step 6:
- Histogram statistics on the time tags in the FIFO memory is performed synchronously. The start time of each emitted laser pulse is recorded as the start tags, the stop time when a backscattered photon is detected is recorded as the stop tags, the time difference between each stop tag and its corresponding start tag is calculated as the photon time-of-flight, and a histogram of all photon time-of-flights is generated [38]. Statistical results will be sent to the Send FIFO memory, and then perform the next histogram statistics.
- Step 7:
- The data in Send FIFO memory of the MCAS are then sent to a computer or storage device via the serial port.
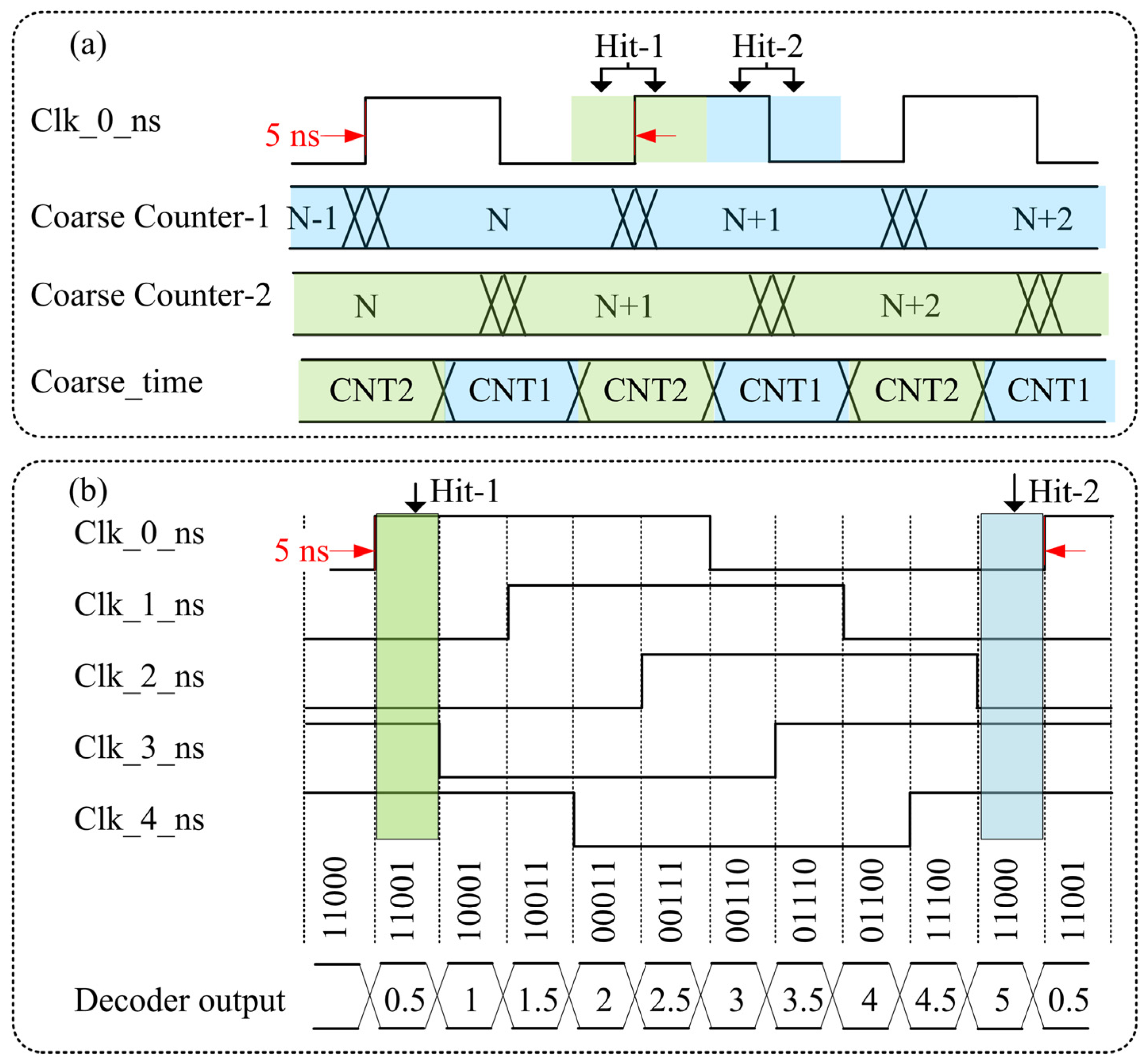
2.1. Timing Principles of the Time-to-Digital Converter
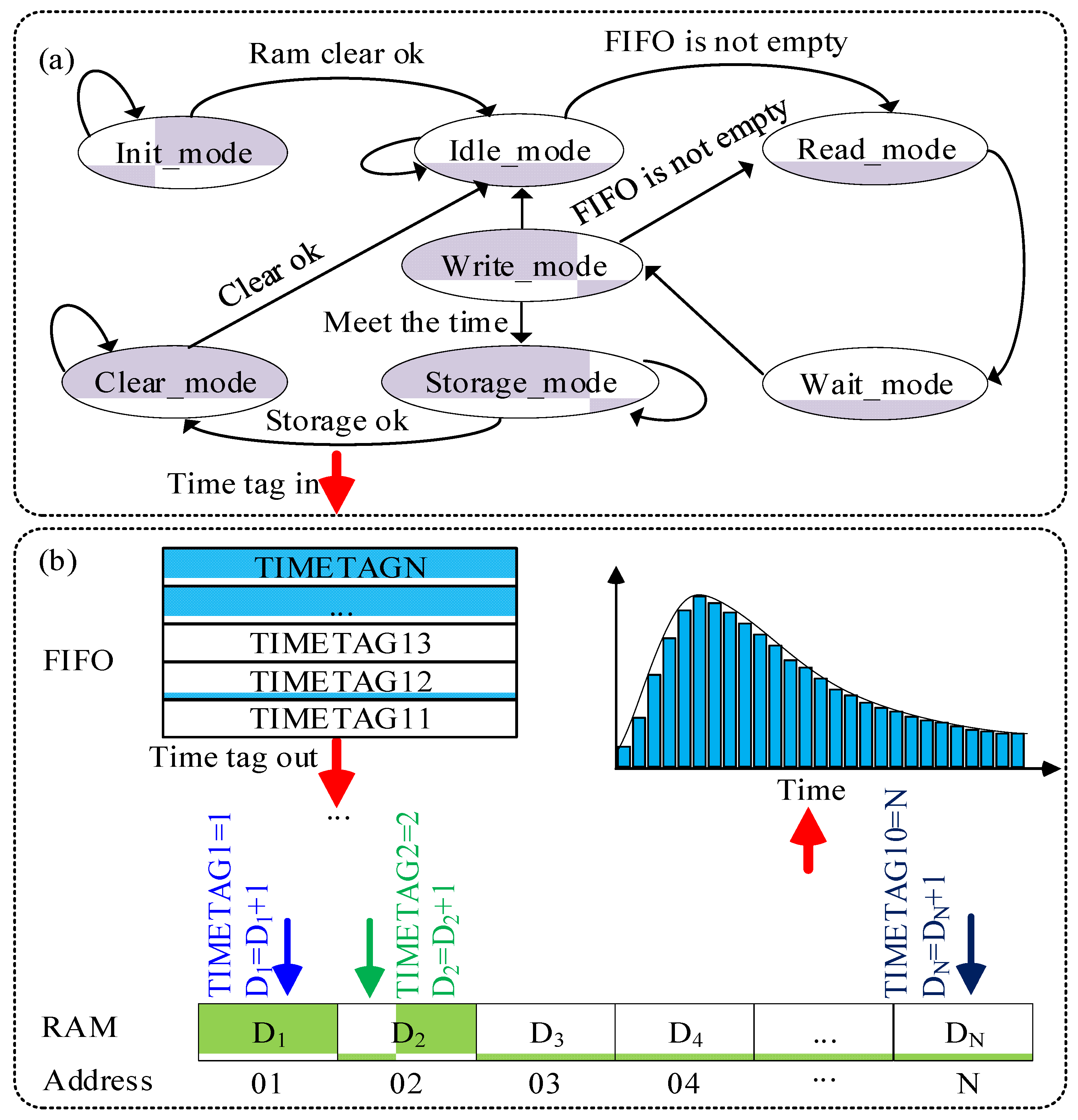
2.2. Principle of the Histogram Statistics
- Step 1:
- Upon power-up and initialization, the MCAS requests a RAM cell of length ‘N’, which depends on the number of bins of the histogram that need statistical analysis.
- Step 2:
- Once the RAM cell is cleared, the MCAS transitions from Init_mode to Idle_mode.
- Step 3:
- In cases where the FIFO RAM still has stored time tags, the MCAS reads these tags and uses them as addresses to locate corresponding RAM cells. The MCAS then reads the value stored within these cells, increases the value by one, and then stores it back to the original location. However, if the FIFO RAM is empty, the MCAS remains in Idle_mode.
- Step 4:
- If the statistical time has not yet reached the set value, and the FIFO RAM is not empty, the MCAS continues executing Step 2. Once the statistical time reaches the set value, the MCAS transfers the statistical results to Send FIFO RAM for the corresponding RAM cell. After the transfer is completed, the RAM cell is cleared, and MCAS returns to Idle_mode to commence the next cycle of histogram statistics. Ultimately, the number of time tags (i.e., photon counts) at different distances are recorded. This allows for the creation of the histogram depicting the photon count distribution at various distances, as collated from multiple laser pulses, as depicted in Figure 3b.
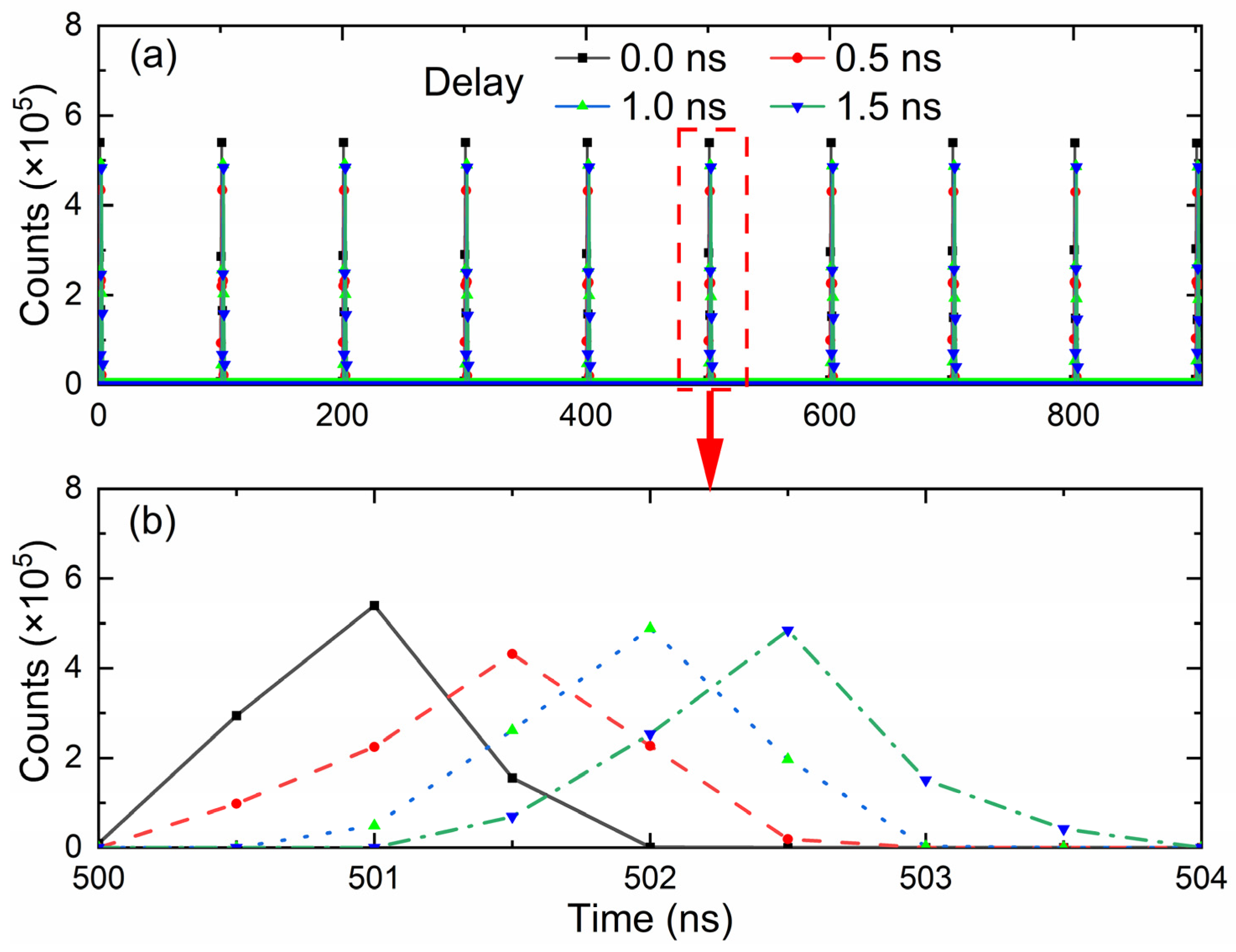
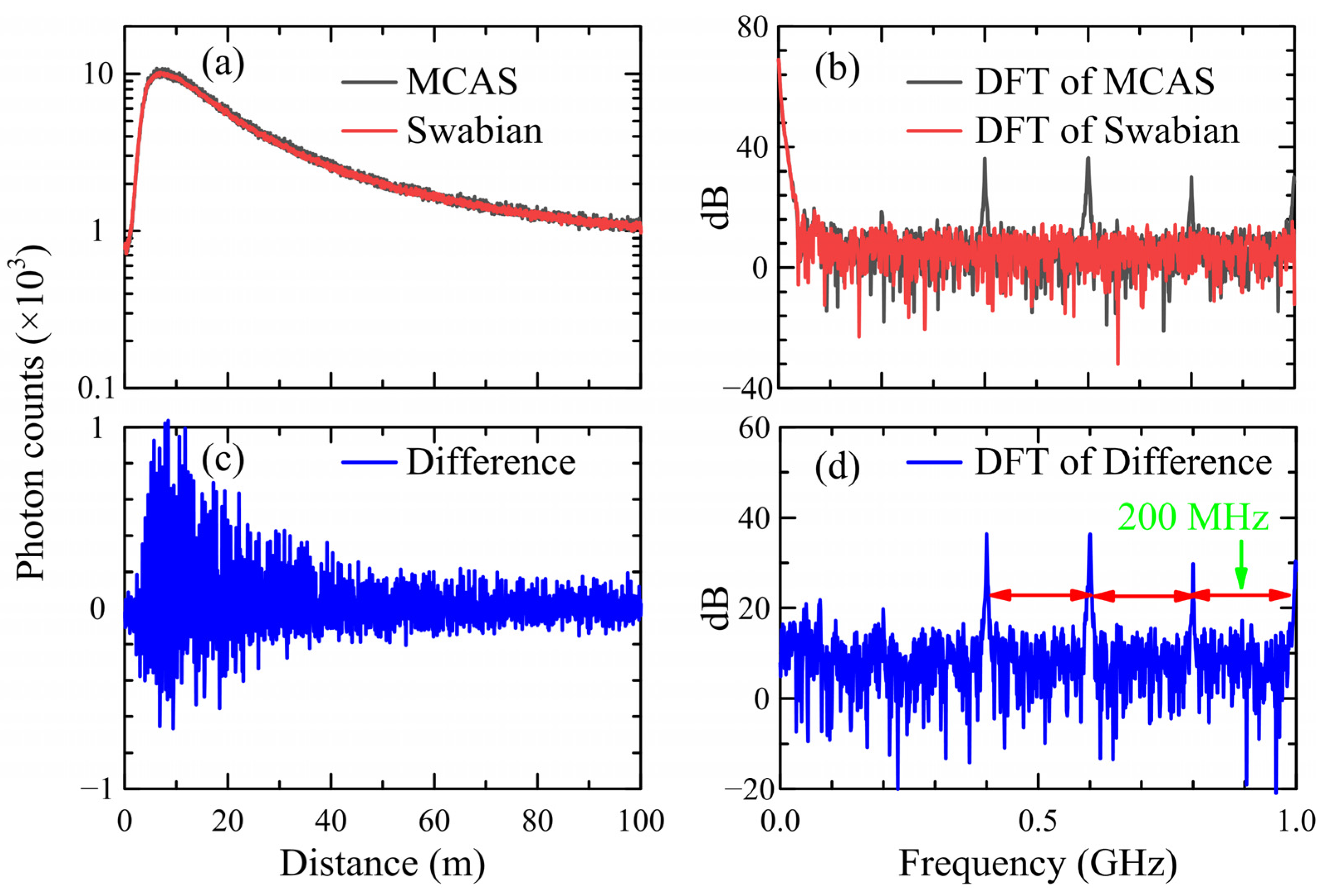
2.3. Performance Verification
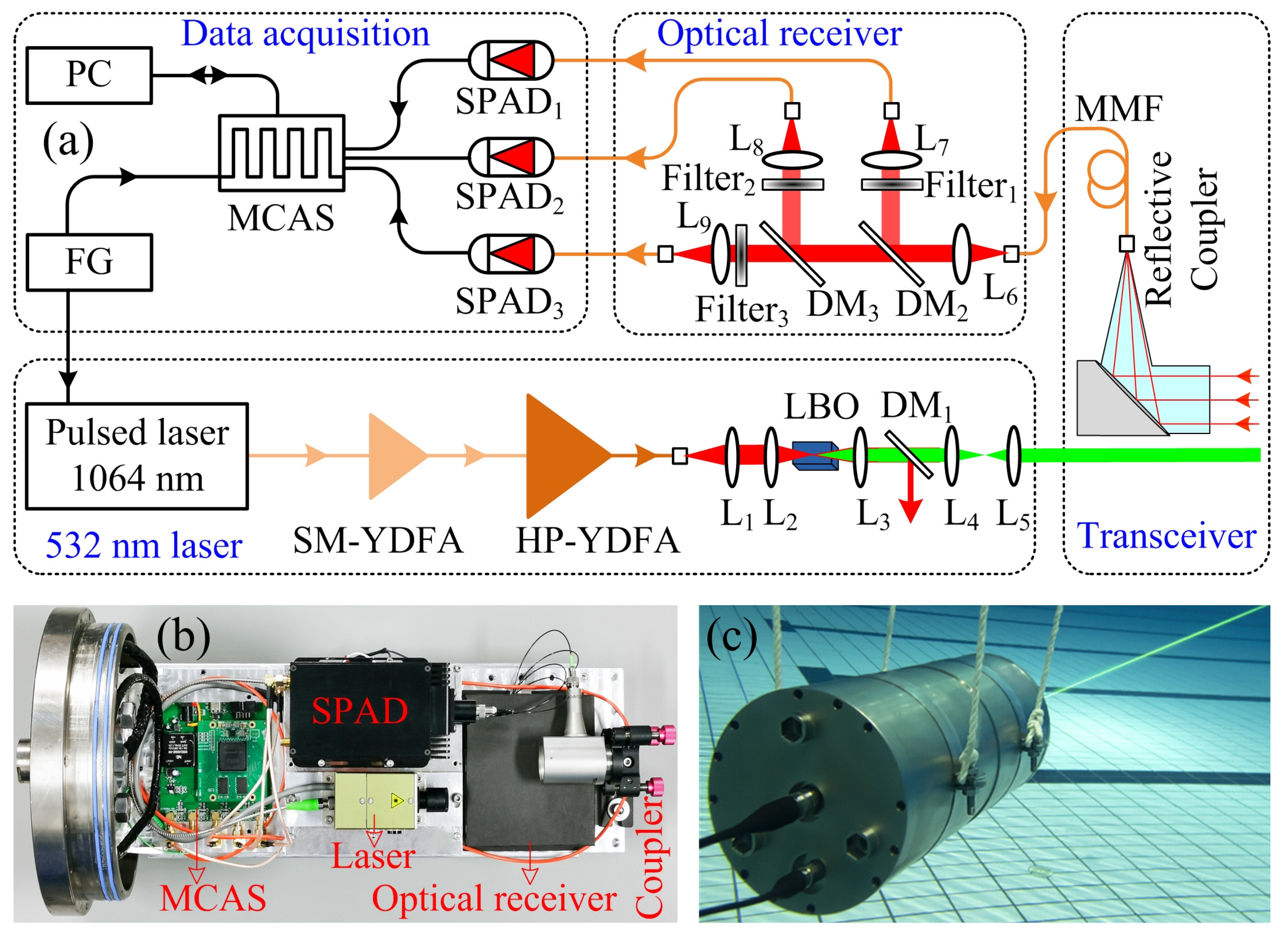
3. Application of MCAS in the Single-Photon Underwater Lidar
4. Correction of Backscattered Signal
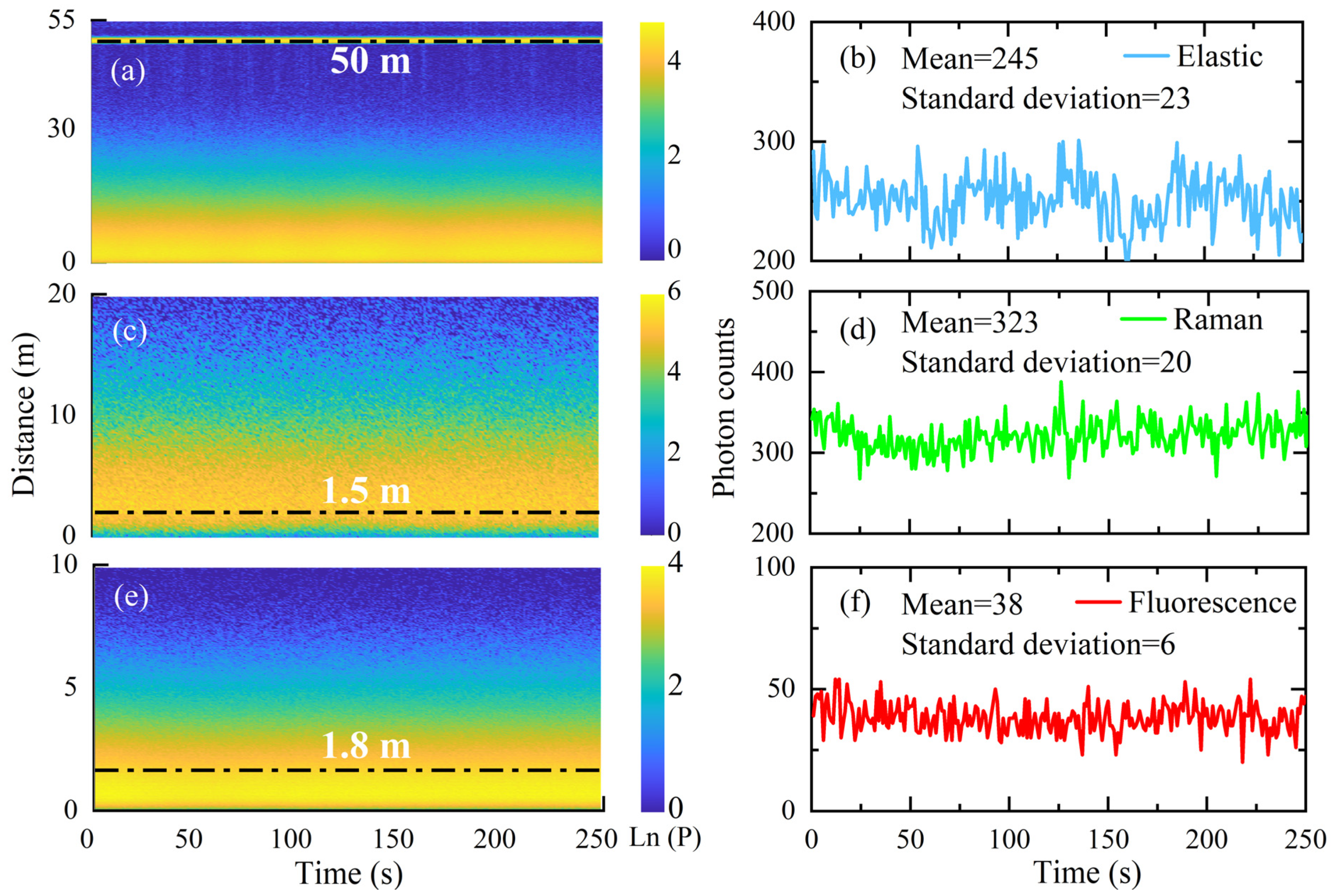
5. Validation Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Churnside, J.H. Review of profiling oceanographic lidar. Opt. Eng. 2014, 53, 051405. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Schwarz, R.; Flöry, S.; Nussbaumer, L. Concept and performance evaluation of a novel UAV-borne topo-bathymetric LiDAR sensor. Remote Sens. 2020, 12, 986. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Hu, Y.; O’Malley, R.T.; Boss, E.S.; Hostetler, C.A.; Siegel, D.A.; Sarmiento, J.L.; Schulien, J.; Hair, J.W.; Lu, X. Annual boom–bust cycles of polar phytoplankton biomass revealed by space-based lidar. Nat. Geosci. 2017, 10, 118–122. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, P.J. Subsurface phytoplankton vertical structure from lidar observation during SCS summer monsoon onset. Opt. Express 2022, 30, 17665–17679. [Google Scholar] [CrossRef]
- Fiorani, L.; Fantoni, R.; Lazzara, L.; Nardello, I.; Okladnikov, I.; Palucci, A.J. Lidar calibration of satellite sensed CDOM in the southern ocean. EARSeL eProc. 2006, 5, 89–99. [Google Scholar]
- Churnside, J.H. Lidar signature from bubbles in the sea. Opt. Express 2010, 18, 8294–8299. [Google Scholar] [CrossRef]
- Churnside, J.H.; Shaw, J.A. Lidar remote sensing of the aquatic environment. Appl. Opt. 2020, 59, C92–C99. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Wu, S.; Liu, B.; Liu, J.; Zhang, K.; Dai, G.; Tang, J.; Chen, G. Shipborne variable-FOV, dual-wavelength, polarized ocean lidar: Design and measurements in the Western Pacific. Opt. Express 2022, 30, 8927–8948. [Google Scholar] [CrossRef]
- Wang, D.; Xing, S.; He, Y.; Yu, J.; Xu, Q.; Li, P. Evaluation of a New Lightweight UAV-Borne Topo-Bathymetric LiDAR for Shallow Water Bathymetry and Object Detection. Sensors 2022, 22, 1379. [Google Scholar] [CrossRef]
- Li, K.; He, Y.; Ma, J.; Jiang, Z.; Hou, C.; Chen, W.; Zhu, X.; Chen, P.; Tang, J.; Wu, S. A dual-wavelength ocean lidar for vertical profiling of oceanic backscatter and attenuation. Remote Sens. 2020, 12, 2844. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Maccarone, A.; Drummond, K.; McCarthy, A.; Steinlehner, U.K.; Tachella, J.; Garcia, D.A.; Pawlikowska, A.; Lamb, R.A.; Henderson, R.K.; McLaughlin, S.; et al. Submerged single-photon LiDAR imaging sensor used for real-time 3D scene reconstruction in scattering underwater environments. Opt. Express 2023, 31, 16690–16708. [Google Scholar] [CrossRef] [PubMed]
- Shangguan, M.; Yang, Z.; Shangguan, M.; Lin, Z.; Liao, Z.; Guo, Y.; Liu, C. Remote sensing oil in water with an all-fiber underwater single-photon Raman lidar. Appl. Opt. 2023, 62, 5301–5305. [Google Scholar] [CrossRef] [PubMed]
- Shangguan, M.; Yang, Z.; Lin, Z.; Lee, Z.; Xia, H.; Weng, Z. Compact long-range single-photon underwater lidar with high spatial-temporal resolution. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1501905. [Google Scholar] [CrossRef]
- Shangguan, M.; Xia, H.; Wang, C.; Qiu, J.; Shentu, G.; Zhang, Q.; Dou, X.; Pan, J.-W. All-fiber upconversion high spectral resolution wind lidar using a Fabry-Perot interferometer. Opt. Express 2016, 24, 19322–19336. [Google Scholar] [CrossRef]
- Shangguan, M.; Xia, H.; Wang, C.; Qiu, J.; Lin, S.; Dou, X.; Zhang, Q.; Pan, J.-W. Dual-frequency Doppler lidar for wind detection with a superconducting nanowire single-photon detector. Opt. Lett. 2017, 42, 3541–3544. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Shangguan, M.; Xia, H.; Zhang, J.; Dou, X.; Pan, J.-W. Fully integrated free-running InGaAs/InP single-photon detector for accurate lidar applications. Opt. Express 2017, 25, 14611–14620. [Google Scholar] [CrossRef] [PubMed]
- Xia, H.; Shangguan, M.; Shentu, G.; Wang, C.; Qiu, J.; Zheng, M.; Xie, X.; Dou, X.; Zhang, Q.; Pan, J.-W. Brillouin optical time-domain reflectometry using up-conversion single-photon detector. Opt. Commun. 2016, 381, 37–42. [Google Scholar] [CrossRef]
- Shangguan, M.; Wang, C.; Xia, H.; Shentu, G.; Dou, X.; Zhang, Q.; Pan, J.-W. Brillouin optical time domain reflectometry for fast detection of dynamic strain incorporating double-edge technique. Opt. Commun. 2017, 398, 95–100. [Google Scholar] [CrossRef]
- Maccarone, A.; Mccarthy, A.; Ren, X.; Warburton, R.E.; Wallace, A.M.; Moffat, J.; Petillot, Y.; Buller, G.S. Underwater depth imaging using time-correlated single-photon counting. Opt. Express 2015, 23, 33911. [Google Scholar] [CrossRef] [PubMed]
- Maccarone, A.; Rocca, F.; Mccarthy, A.; Henderson, R.; Buller, G.S. Three-dimensional imaging of stationary and moving targets in turbid underwater environments using a single-photon detector array. Opt. Express 2019, 27, 28437–28456. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Kong, W.; Chen, P.; Chen, T.; Huang, G.; Shu, R. A shipborne photon-counting lidar for depth-resolved ocean observation. Remote Sens. 2022, 14, 3351. [Google Scholar] [CrossRef]
- Shangguan, M.; Liao, Z.; Guo, Y.; Lee, Z. Sensing the profile of particulate beam attenuation coefficient through a single-photon oceanic Raman lidar. Opt. Express 2023, 31, 25398–25414. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.-J.; Choi, J.-H.; Hong, D.G. Dose and dose rate dependence of time-resolved OSL from Korean paleosol quartz. Radiat. Meas. 2011, 46, 1518–1521. [Google Scholar] [CrossRef]
- Picoquant. Home. Accessed. Available online: https://www.picoquant.com/products/category/tcspc-and-time-tagging-modules (accessed on 23 September 2023).
- J.Smith. Time Tagger Series. Available online: https://www.swabianinstruments.com/time-tagger/ (accessed on 23 September 2023).
- IdQuantique. ID900 Time Controller. Accessed. 2019. Available online: https://www.spectra-line.com/uploads/20200410/b72ffd11ba3e25bdde788943f8899927.pdf (accessed on 23 September 2023).
- Wang, Y.; Kuang, P.; Liu, C. A 256-channel multi-phase clock sampling-based time-to-digital converter implemented in a Kintex-7 FPGA. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 23–26 May 2016; pp. 1–5. [Google Scholar]
- Lin, M.-C.; Tsai, G.-R.; Liu, C.-Y.; Chu, S.-S. FPGA-based high area efficient time-to-digital IP design. In Proceedings of the TENCON 2006-2006 IEEE Region 10 Conference, Hong Kong, China, 14–17 November 2006; pp. 1–4. [Google Scholar]
- Cheng, Z.; Zheng, X.; Deen, M.J.; Peng, H.J. Recent Developments and Design Challenges of High-Performance Ring Oscillator CMOS Time-to-Digital Converters. IEEE Trans. Electron Devices 2015, 63, 1–17. [Google Scholar] [CrossRef]
- Wang, Y.; Chong, L.J. A 4.2 ps Time-Interval RMS Resolution Time-to-Digital Converter Using a Bin Decimation Method in an UltraScale FPGA. IEEE Trans. Nucl. Sci. 2016, 63, 2632–2638. [Google Scholar] [CrossRef]
- Szplet, R.; Czuba, A. Two-Stage Clock-Free Time-to-Digital Converter Based on Vernier and Tapped Delay Lines in FPGA Device. Electronics 2021, 10, 2190. [Google Scholar] [CrossRef]
- Won, J.Y.; Kwon, S.I.; Yoon, H.S.; Ko, G.B.; Son, J.-W.; Lee, J.S. Dual-Phase Tapped-Delay-Line Time-to-Digital Converter With On-the-Fly Calibration Implemented in 40 nm FPGA. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 231. [Google Scholar] [CrossRef]
- Wu, J. Several Key Issues on Implementing Delay Line Based TDCs Using FPGAs. IEEE Trans. Nucl. Sci. 2010, 57, 1543–1548. [Google Scholar] [CrossRef]
- Namba, A.K. A low area calibration technique of TDC using variable clock generator for accurate on-line delay measurement. In Proceedings of the International Symposium on Quality Electronic Design, Santa Clara, CA, USA, 2–4 March 2015. [Google Scholar]
- Wu, J.; Shi, Z. The 10-ps wave union TDC: Improving FPGA TDC resolution beyond its cell delay. In Proceedings of the IEEE Nuclear Science Symposium Conference Record, Dresden, Germany, 19–25 October 2008. [Google Scholar]
- Markovic, B.; Tisa, S.; Villa, F.A.; Tosi, A.; Zappa, F. A High-Linearity, 17 ps Precision Time-to-Digital Converter Based on a Single-Stage Vernier Delay Loop Fine Interpolation. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 557–569. [Google Scholar] [CrossRef]
- Barton-Grimley, R.A.; Stillwell, R.A.; Thayer, J.P. High resolution photon time-tagging lidar for atmospheric point cloud generation. Opt. Express 2018, 26, 26030–26044. [Google Scholar] [CrossRef] [PubMed]
- Brewer, P.G.; Peltzer, E.T.; Walz, P.M.; Wojciechowicz, M. The speciation of water in sea water and in gelatinous marine animals. Mar. Chem. 2017, 195, 94–104. [Google Scholar] [CrossRef]
- Taniguchi, M.; Lindsey, J.S. Absorption and fluorescence spectral database of chlorophylls and analogues. Photochem. Photobiol. 2021, 97, 136–165. [Google Scholar] [CrossRef] [PubMed]
- Gordon, H.R. Interpretation of airborne oceanic lidar: Effects of multiple scattering. Appl. Opt. 1982, 21, 2996–3001. [Google Scholar] [CrossRef]
- Churnside, J.H.; Hair, J.W.; Hostetler, C.A.; Scarino, A.J. Ocean backscatter profiling using high-spectral-resolution lidar and a perturbation retrieval. Remote Sens. 2018, 10, 2003. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Range | 1500 ns | Maximum input frequency | 200 MHz |
| Digital resolution | 500 ps | Input impedance | 50 Ω |
| Input channels | 3 | Input signal range | 0–5 V |
| Minimum pulse width | 5 ns | Trig level range | 0–4.5 V |
| No loss of pulse | Yes | Minimum pulse height | 60 mV |
| Data interface | Usart | Histogram statistics | Yes |
| Dead time | 5 ns | Size (L × W × H) | 90 × 90 × 20 mm3 |
| Parameter | Value |
|---|---|
| Wavelength of the laser | 532 nm |
| Pulse duration | 3 ns |
| Pulse repetition rate | 340 KHz |
| Pulse energy of the laser | 2.94 μJ |
| Focal length of the collimator | 27.5 mm |
| FOV of the collimator | 3.8 mrad |
| Detection efficiency at 650 nm | 52% |
| Detection efficiency at 685 nm | 48% |
| Detection efficiency at 532 nm | 50% |
| Dark counts of the detector | 100 cps |
| Maximum detection range of the elastic channel | >50 m |
| Maximum detection range of the Raman channel | >15 m |
| Maximum detection range of the fluorescence channel | >15 m |
| Spatial resolution | 0.33 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Z.; Shangguan, M.; Cao, F.; Yang, Z.; Qiu, Y.; Weng, Z. Underwater Single-Photon Lidar Equipped with High-Sampling-Rate Multi-Channel Data Acquisition System. Remote Sens. 2023, 15, 5216. https://doi.org/10.3390/rs15215216
Lin Z, Shangguan M, Cao F, Yang Z, Qiu Y, Weng Z. Underwater Single-Photon Lidar Equipped with High-Sampling-Rate Multi-Channel Data Acquisition System. Remote Sensing. 2023; 15(21):5216. https://doi.org/10.3390/rs15215216
Chicago/Turabian StyleLin, Zaifa, Mingjia Shangguan, Fuqing Cao, Zhifeng Yang, Ying Qiu, and Zhenwu Weng. 2023. "Underwater Single-Photon Lidar Equipped with High-Sampling-Rate Multi-Channel Data Acquisition System" Remote Sensing 15, no. 21: 5216. https://doi.org/10.3390/rs15215216
APA StyleLin, Z., Shangguan, M., Cao, F., Yang, Z., Qiu, Y., & Weng, Z. (2023). Underwater Single-Photon Lidar Equipped with High-Sampling-Rate Multi-Channel Data Acquisition System. Remote Sensing, 15(21), 5216. https://doi.org/10.3390/rs15215216