1. Introduction
As a key indicator of hydrological variation, river discharge contains abundant information about the water cycle at basin scale. Observations or predictions of streamflows can provide important support for water resource management and flood disaster prevention [
1]. However, most areas around the globe have not yet established a complete ground-based hydrological observation system subject to factors of adverse geographic condition [
2], maintenance costs [
3], or political constraints [
4,
5], and the availability of existing hydrological observation networks is declining [
6]. Hydrological and hydraulic modeling are common tools for streamflow estimation [
7], but they require many types of data about the physical conditions of the region being modeled, which limits their application in ungauged basins. With the rapid development of remote sensing technology in the past few decades, several hydraulic variables related to streamflow can be extracted, i.e., water surface level, water surface elevation, and river channel slope. Many studies have established empirical relationships [
8,
9,
10] between single or multivariate satellite observations and measured streamflows, showing great potential for estimating streamflow from space.
Among satellite-observable river hydraulics, the water surface level is the most preferable for streamflow estimation, as it possesses the strongest relationship with streamflow and is commonly used in regular ground observations for scaling streamflow [
11,
12]. Observations from satellite radar altimetry have been widely used for streamflow estimations [
13,
14,
15]. However, low spatial coverage gives rise to limitations in its application to streamflow estimation; for space-borne radar altimetry technology, only one-dimensional observations of water level are available, at the point where satellite ground tracks intersect the river [
16]. The distance between two adjacent satellite orbits usually ranges from 80 (ERS-2 and ENVISAT-series) to 315 km (TOPEX-series) [
17]. The newly launched Surface Water and Ocean Topography (SWOT) mission [
18] at the end of 2020 can provide water level and water surface extent observations simultaneously for most middle-to-large rivers globally, which could fill the gap of one-dimensional radar altimetry. However, it is difficult to trace streamflow information back over the past few decades using SWOT, when the hydrological cycle experiences significant changes due to human activity. In this context, river water surface extent or width has the value of tracing streamflow over the past five decades. Since the Landsat 1 launched into space in the early 1970s [
19], many Earth-observing satellites have been collecting huge numbers of images of Earth’s surface. Either from optical or synthetic aperture radar (SAR) images, abundant radiation information is useful for extracting river water surface extent. Additionally, their feasibility for streamflow estimations have been demonstrated in many studies [
20,
21,
22].
For traditional empirical methods, the river water surface extent or river width need to be inverted from spectral and radiative observations from remote sensing, before building statistical relationship to estimate streamflow. Many satellite observations with low spatial resolution may not provide accurate estimations of the river water surface extent. However, their frequency of observation is much higher than that of high-resolution satellite observations, and they consequently contain a huge amount of information about changes in streamflow. For example, MODIS could provide nearly daily observations with a low resolution of several hundred meters. Under the empirical method framework, such coarse satellite observations cannot estimate streamflow with satisfactory accuracy for middle-to-small rivers. Meanwhile, river water surface reflectance from synthetic aperture radar (SAR) or multispectral indices (e.g., modified normalized difference water index (MNDWI)) have strong physical correlations with streamflow, but their unclear physical relationship makes it difficult to estimate river streamflow. Machine learning techniques (MLTs) provide an opportunity to directly track relationships between spectral and radiative signals of river water surface and streamflow. Such techniques have the potential to identify the complex nonlinear input–output relationships without explicitly understanding physical mechanisms between variables. MLTs focus on discovering the intrinsic patterns of data and have been used in the study of streamflow, flood susceptibility, and sediment estimation [
23,
24,
25,
26]. Sahoo [
27] integrated satellite reflectance with different machine learning algorithms (i.e., artificial neural network (ANN), random forest regression (RFR), and support vector regression (SVR)) for ecological flow regime estimations in a typical Brahmani River Basin of India. In Zaji’s study [
28], the brightness temperature was used as the input for three MLT-based methods, i.e., multilayer perceptron (MP), extreme learning machines (ELMs), and radial basis function (RBF), for improving the accuracy of river discharge prediction on the Connecticut River. MLTs also provide a chance to integrate river hydraulics observed from different satellite sensors for streamflow estimations. Tarpanelli [
17] merged the reflectance ratio of a dry pixel (C) to a wet pixel (M) with altimetry data to estimate river discharge using ANN techniques, at Lokoja along the Niger River and Pontelagoscuro along the Po River. In optical and SAR satellite images, information about the river water surface was detected from visible and microwave spectra, respectively. The information describes the characteristics of water surface areas from different and independent aspects. Integration of this information using MLTs may improve streamflow estimation from one single type of satellite observation.
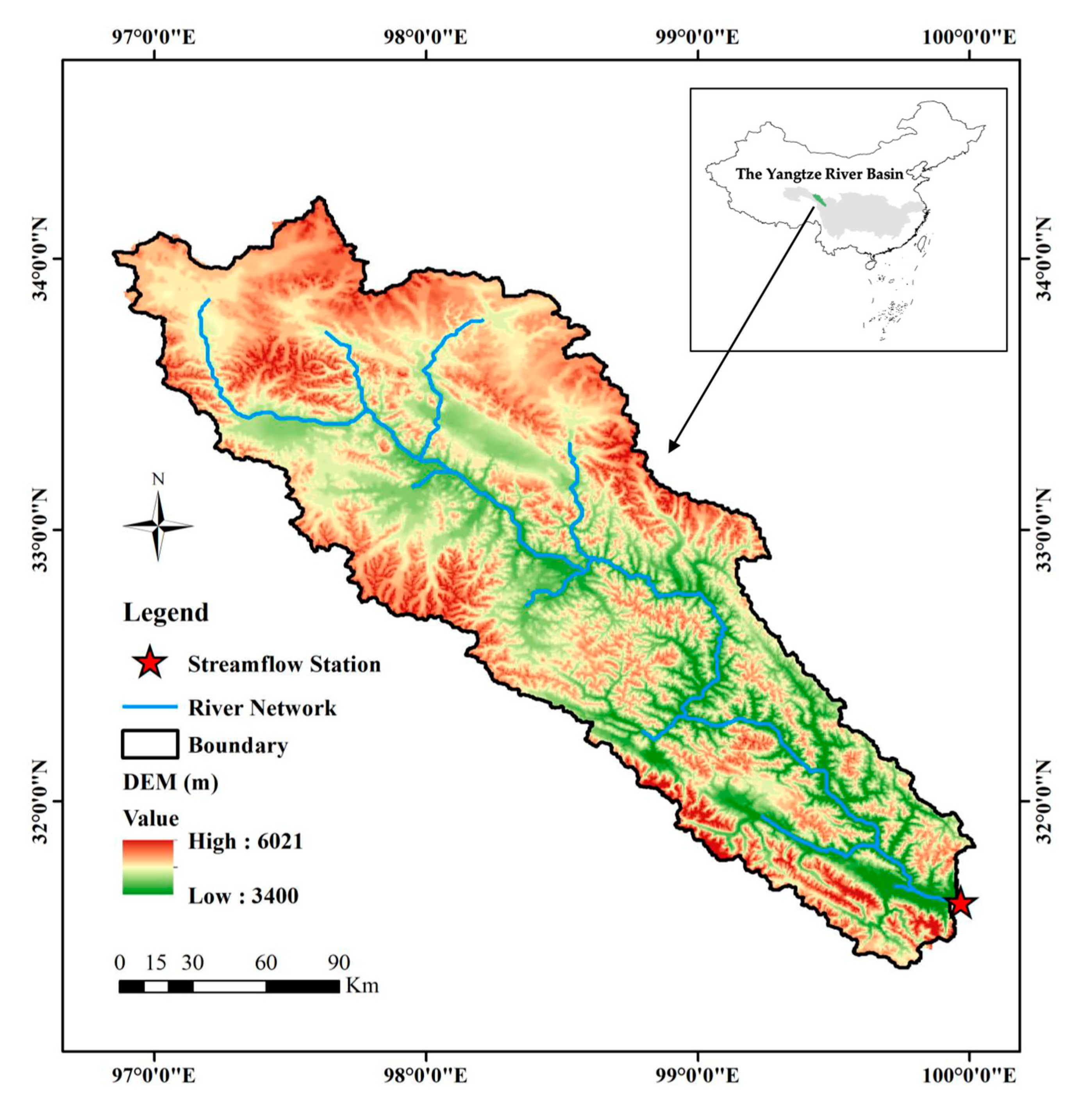
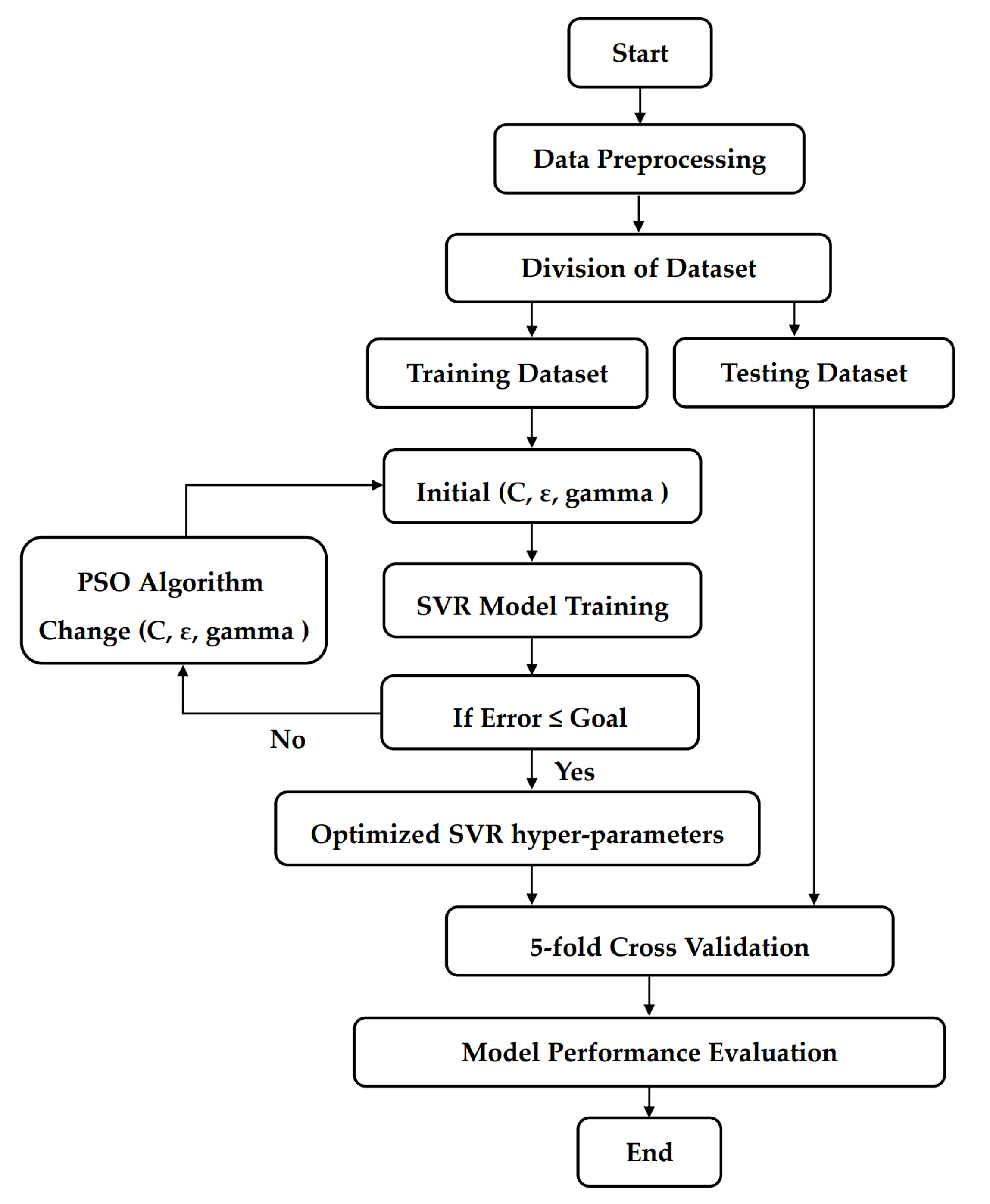
Based on this understanding, the objective of this study was to develop a method for integrating remotely sensed information about river water surfaces derived from optical images and SAR images for streamflow estimation. For the river segment upstream of Ganzi gauging station in the Yalong River, which is located in the Qinghai–Tibet Plateau and is a major tributary of the Yangtze River, variations in water surface were detected from Landsat and MODIS optical images and Sentinel-1 SAR images, and then combined for streamflow estimation using the SVR method. By comparing the results of streamflow estimation using single or multiple satellite observations, the value of integrating information from different sources was evaluated. This study’s contribution is providing a new method for reproducing streamflow variations from over the past few decades and giving some insights into how to more effectively combine information from different types of remote sensing data for streamflow estimation.
6. Conclusions
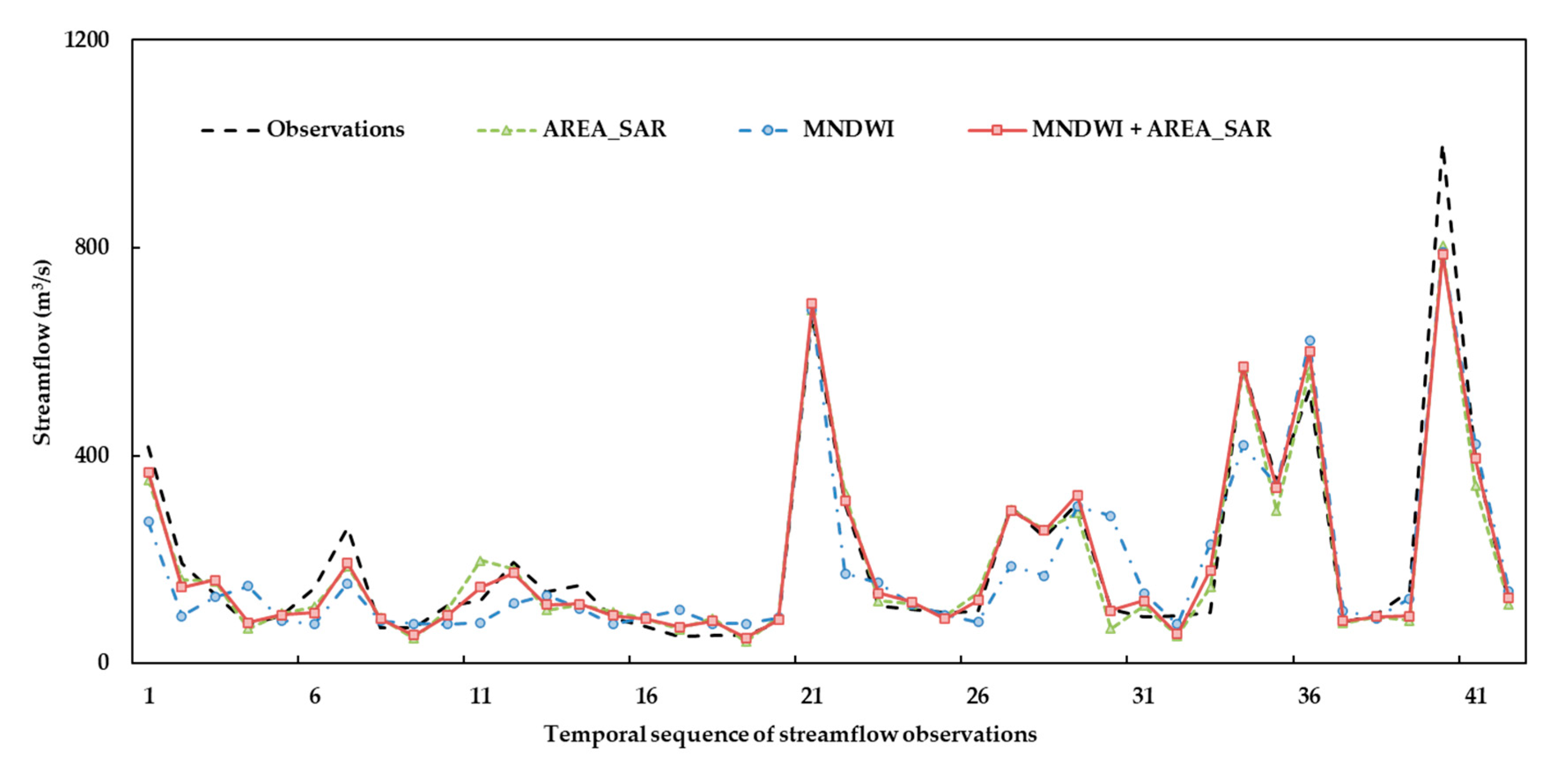
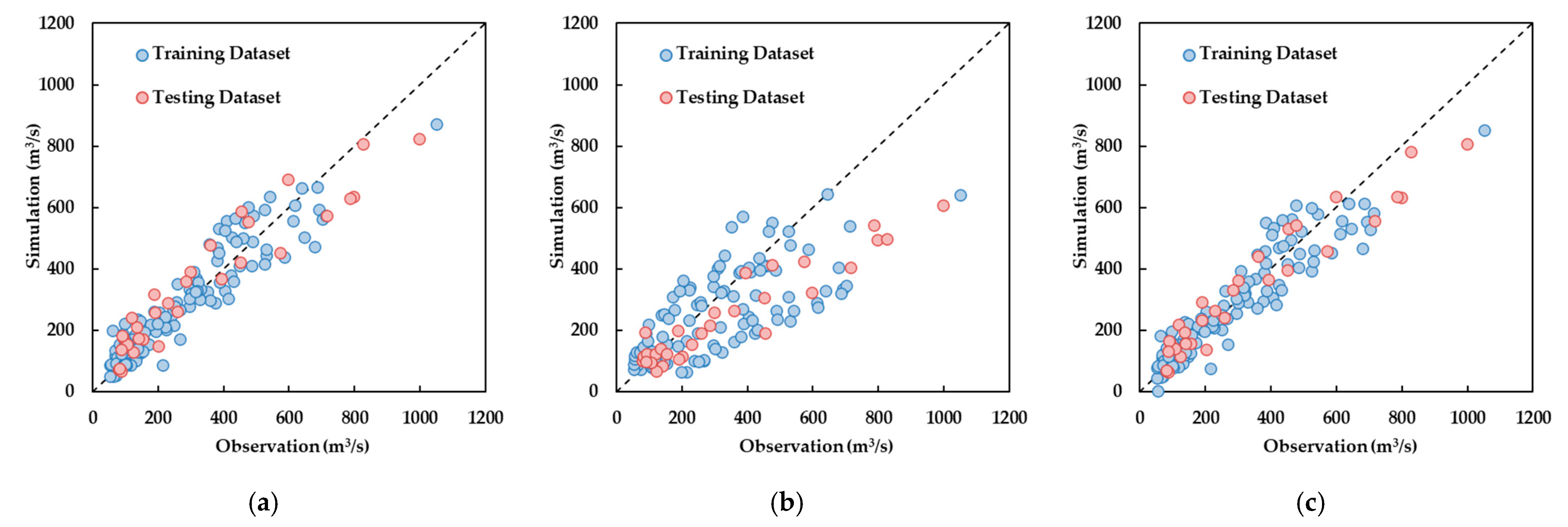
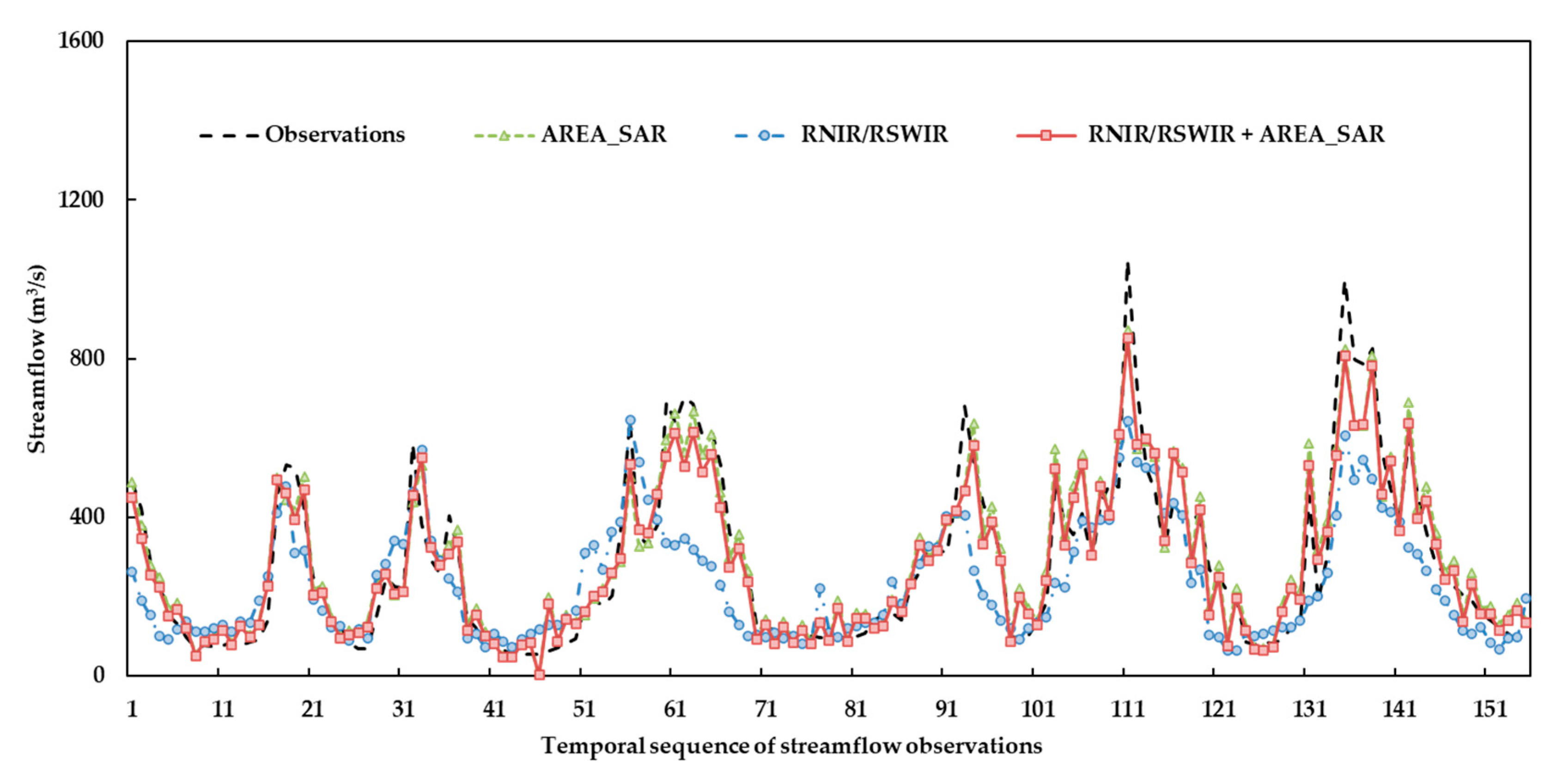
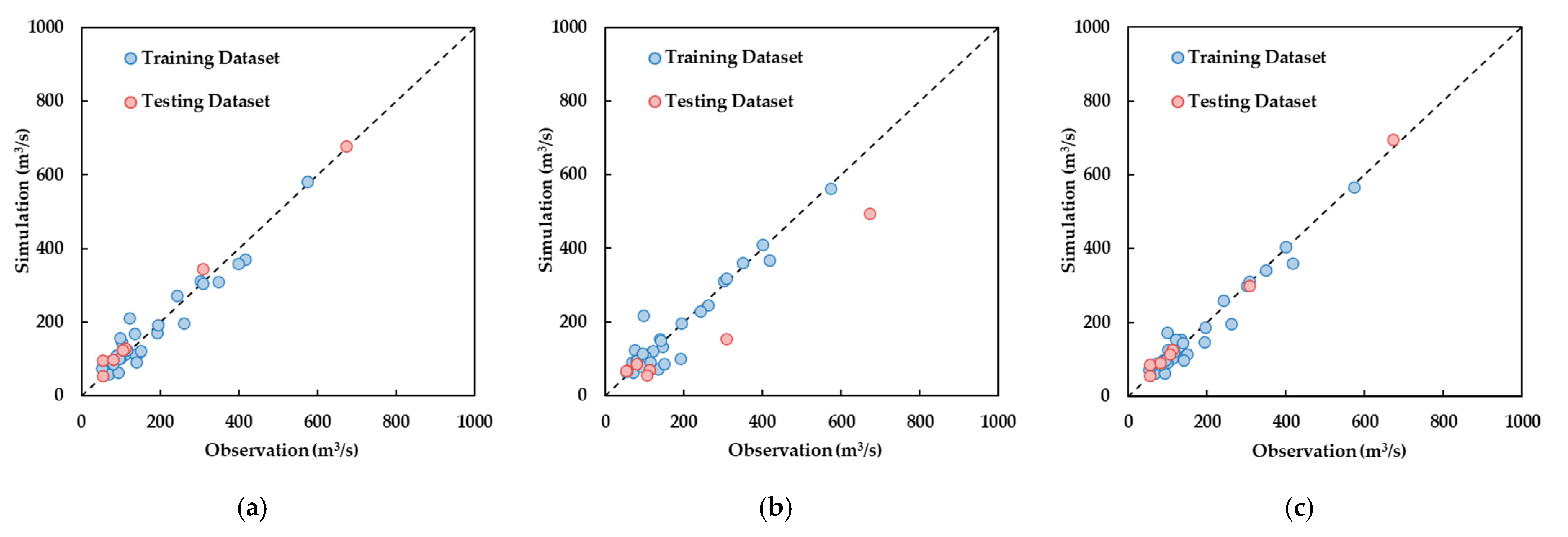
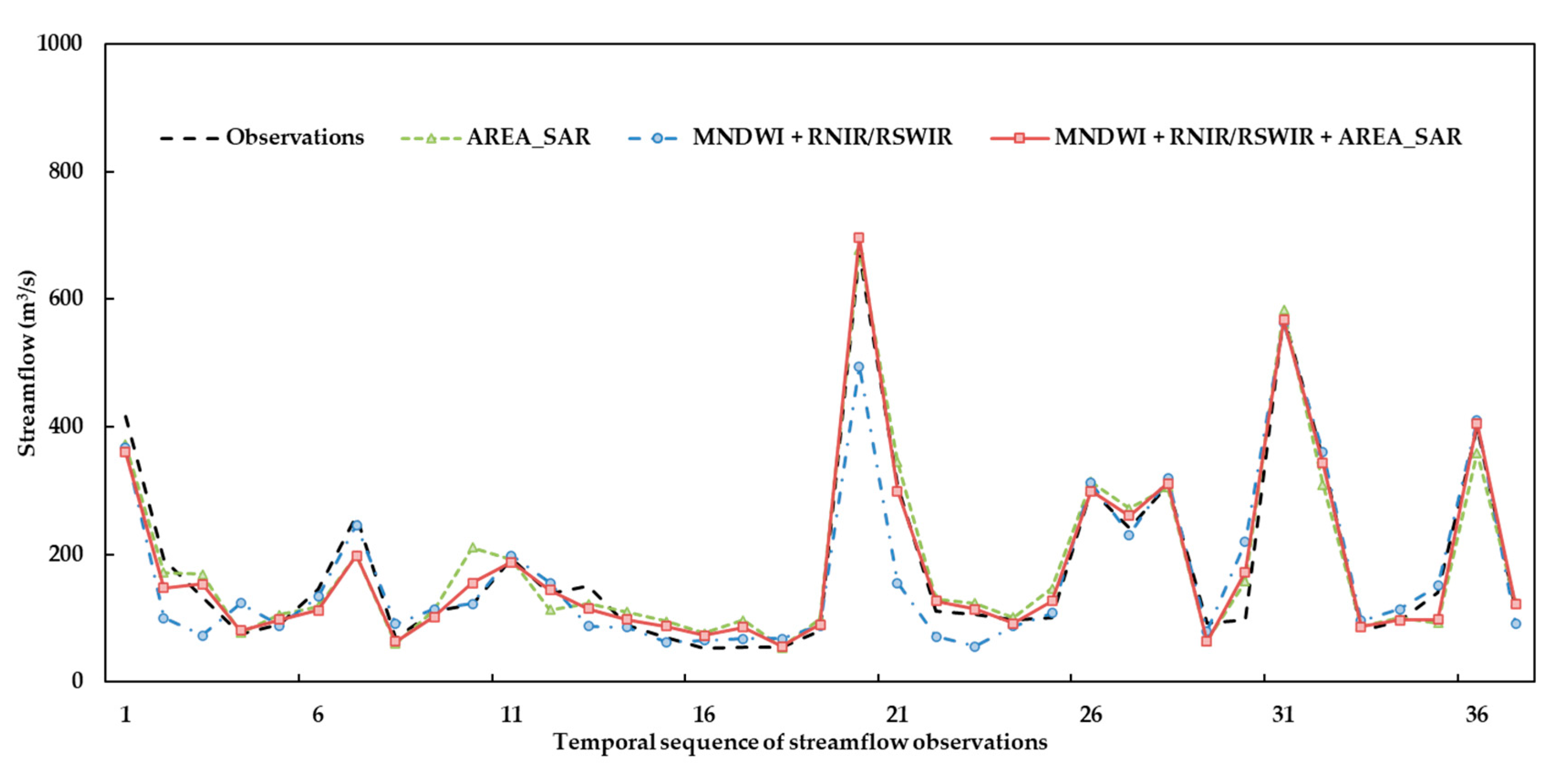
In this study, a method to merge information about water extracted from different optical (i.e., Landsat and MODIS) and SAR (i.e., Sentinel-1) satellite sensors was developed, using the SVR algorithm for streamflow estimation. The river segment upstream of the Ganzi gauging station of Yalong River, a typical river in the Qinghai–Tibetan region, was taken as a proof of concept to investigate the applicability and potential of the proposed method. Three experiments were designed to demonstrate the feasibility of using different combinations of satellite observations. In each experiment, the performance values of three developed models were compared. In Experiment I, the MRE and MAE of streamflow estimates corresponding to the SVR model using both AREA_SAR and MNDWI were 0.19 and 31.6 m3/s for the testing dataset, respectively, and were lower than the two models using AREA_SAR or MNDWI solely as inputs. In Experiment II, the MRE and MAE for the model using RNIR/RSWIR and AREA_SAR were 0.25 and 56.5 m3/s, respectively, and outperformed the two models treating AREA_SAR or MNDWI as single types of input. In Experiment III, the model combining all three types of satellite observations exhibited the highest accuracy, for which the MRE and MAE were 0.18 and 18.4 m3/s, respectively. The results from all three experiments demonstrated that, for the studied river segment, combined observations from optical and radar sensors can provide more accurate streamflow estimates than using a single type of seniors. For a single model, estimates for the high-flow period performed better than those for the low-flow period. In conclusion, the proposed method has great potential for the near-real-time estimation of flood magnitude or the reconstruction of variations in streamflow using historical satellite images in data-sparse regions. To further evaluate its applicability, testing the method in more rivers with different morphological and climatic conditions would be indispensable.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}