
Mapping Fractional Vegetation Cover Using Unoccupied Aerial Vehicle Imagery to Guide Conservation of a Rare Riparian Shrub Ecosystem in Southern California


Abstract
:1. Introduction
2. Materials and Methods
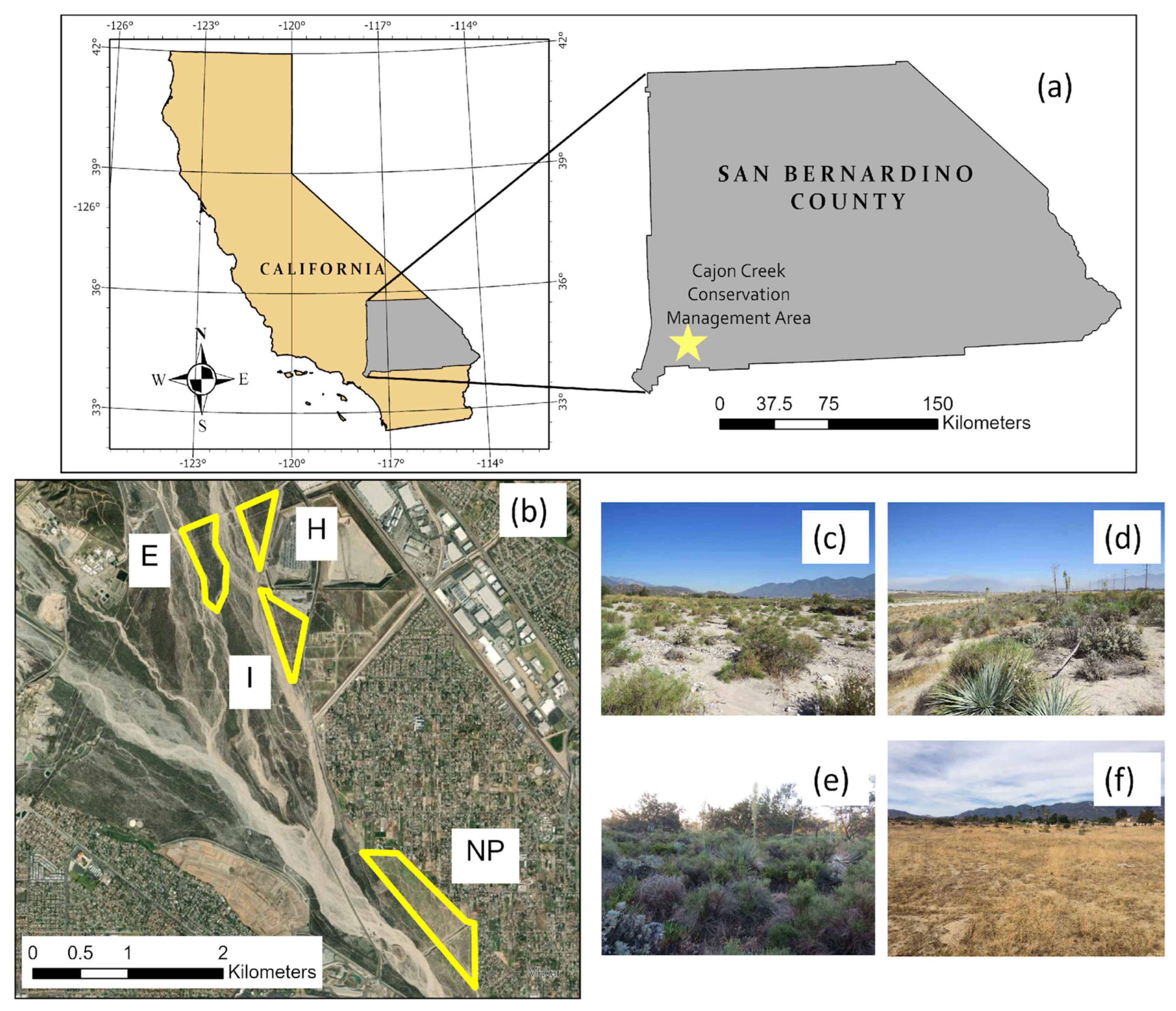
2.1. Study Area
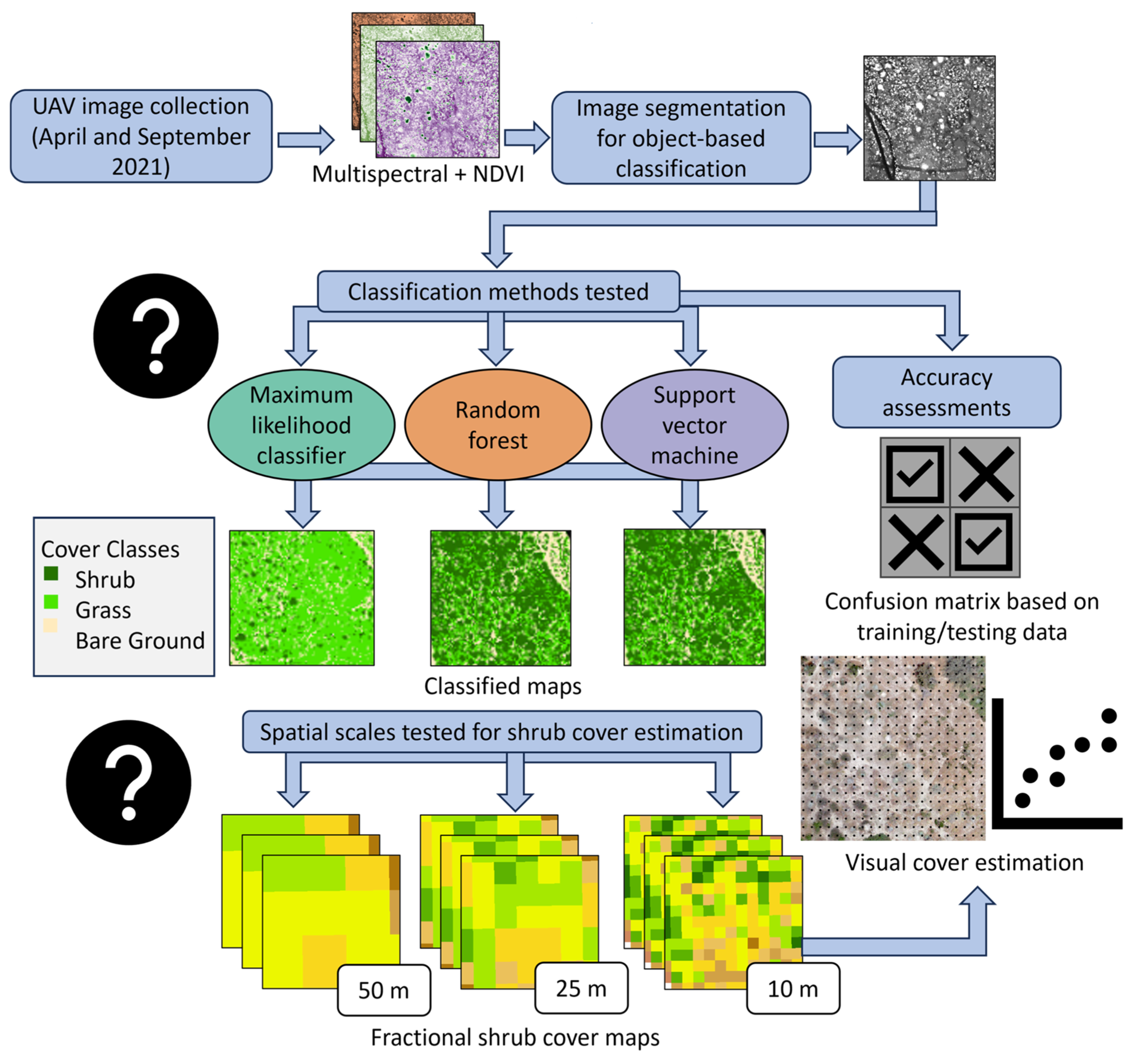
2.2. Data
2.3. Image Processing
2.4. Object-Based Classification
2.5. Classification Algorithms
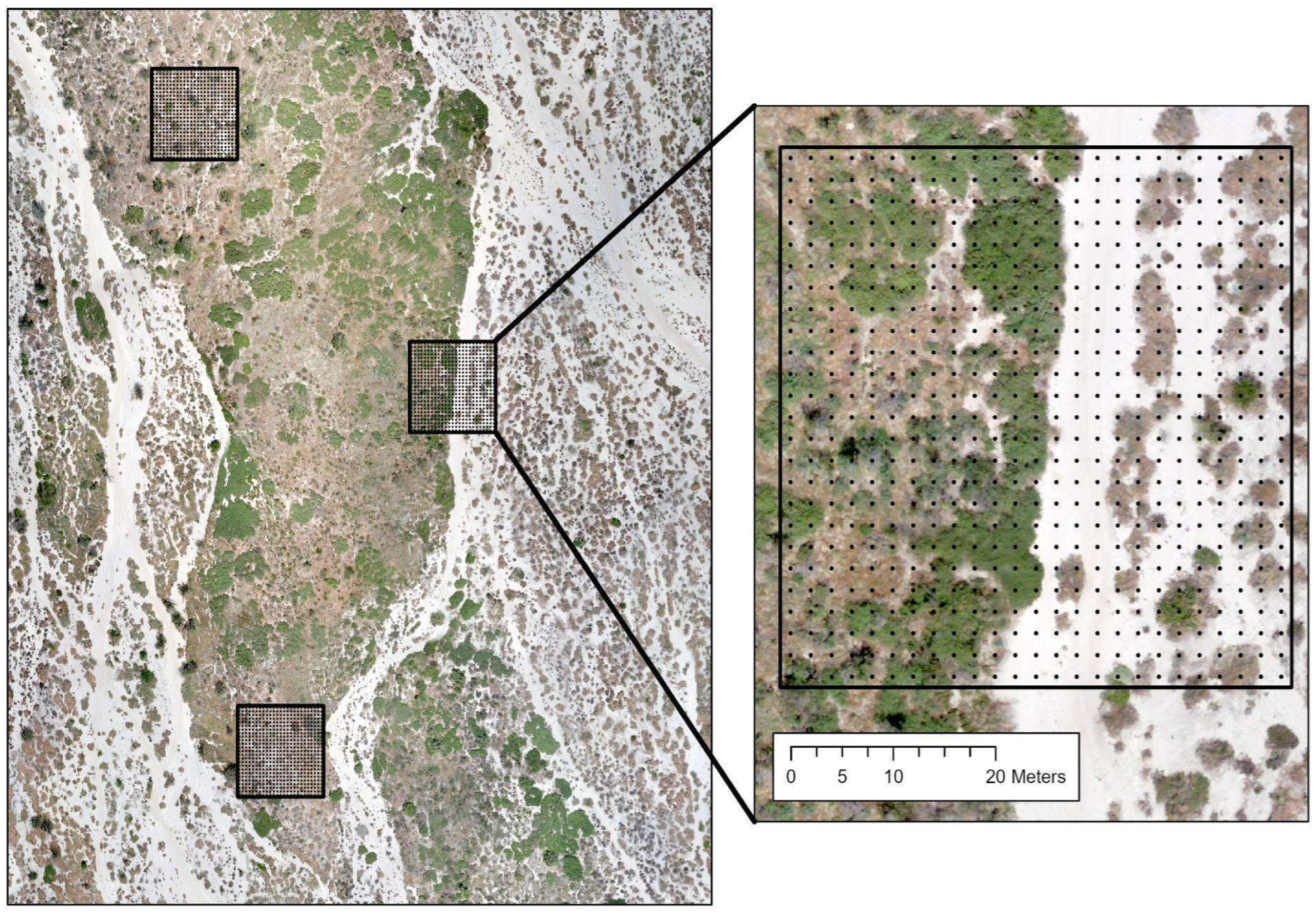
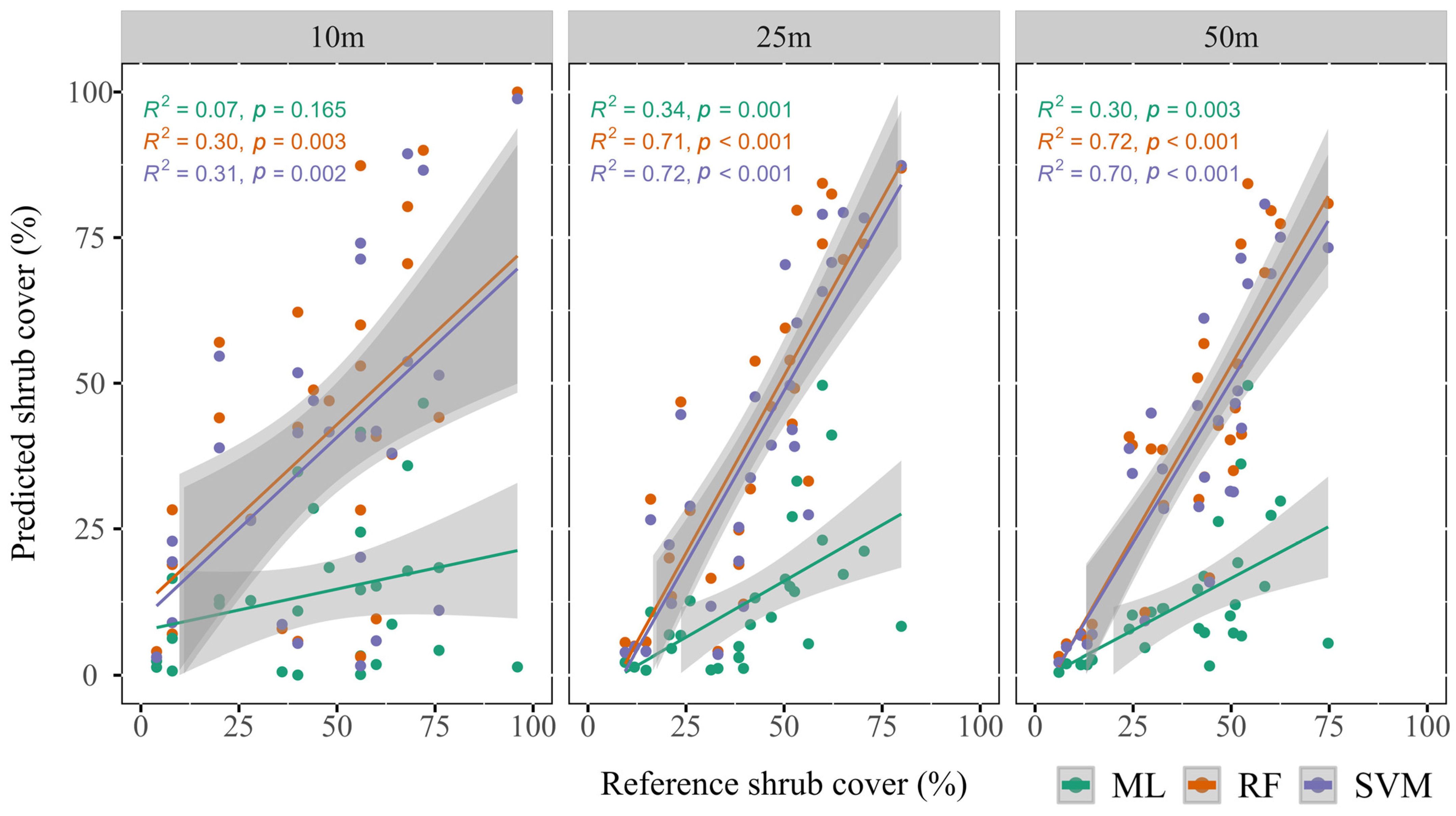
2.6. Shrub Fractional Cover Estimation
3. Results
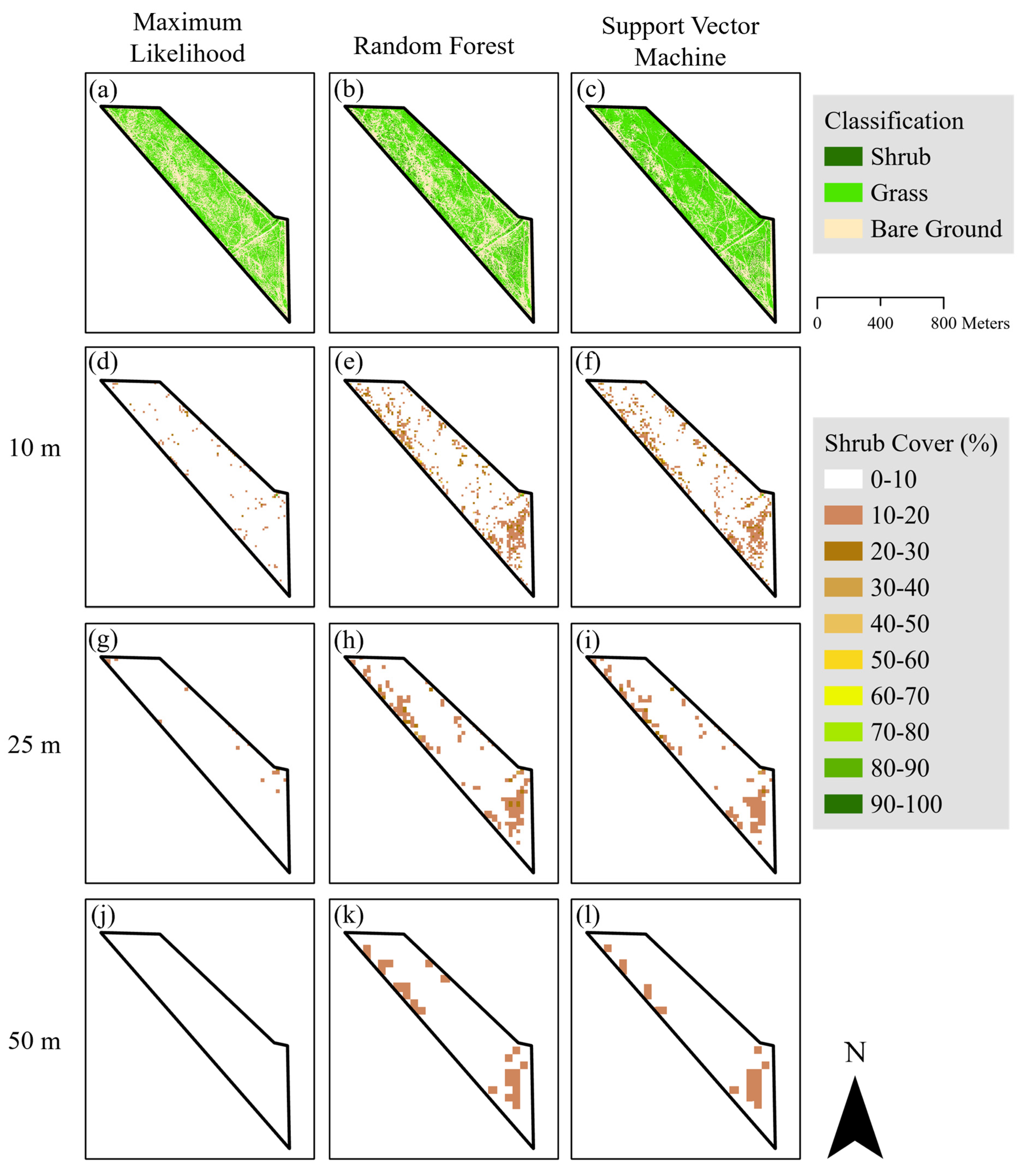
3.1. Image Classification and Fractional Cover Maps
3.2. Accuracy Assessment
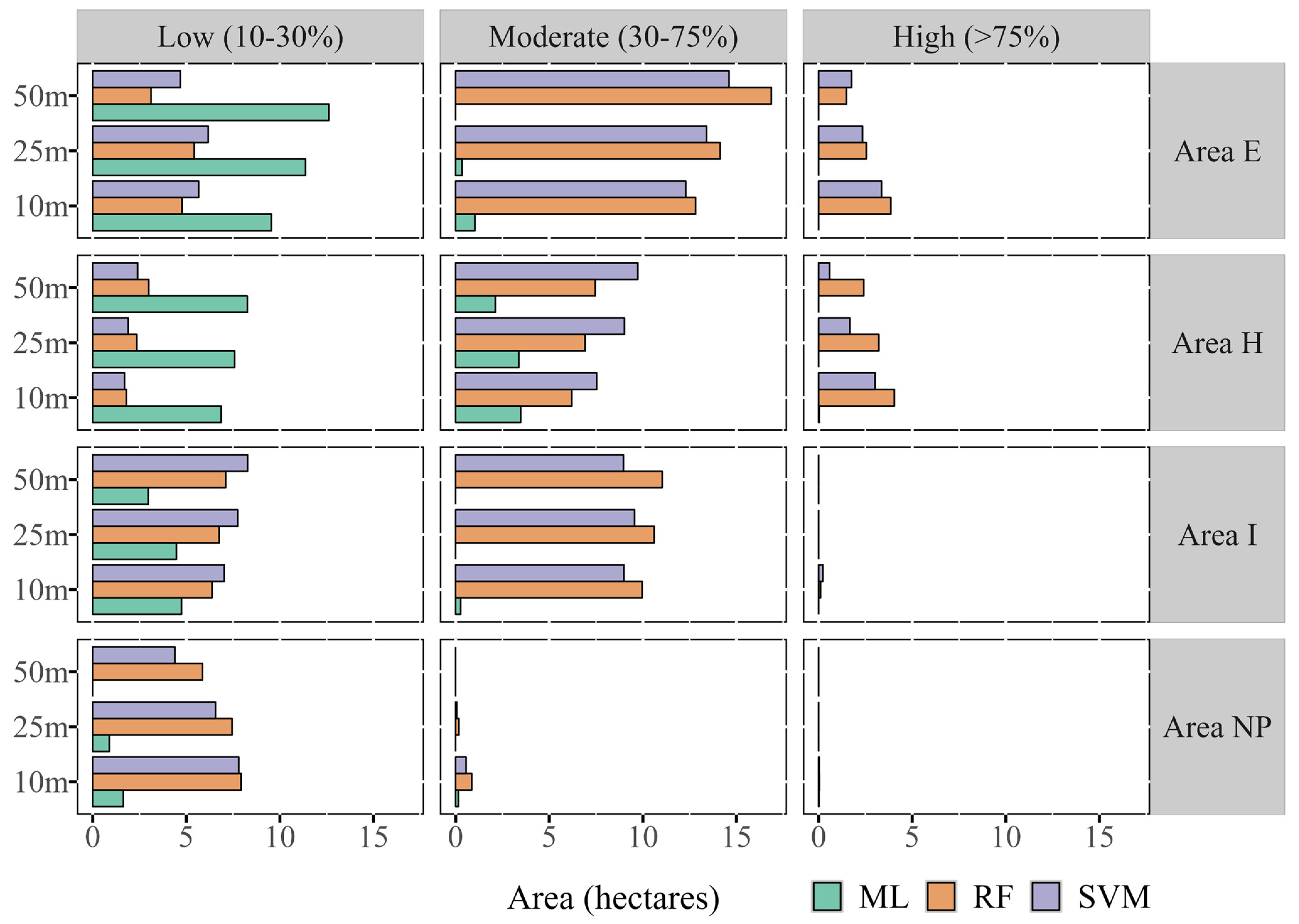
3.3. Fractional Shrub Cover Area Estimates
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Houet, T.; Mony, C.; Lecoq, L.; Corpetti, T. Can UAVs fill the gap between in situ surveys and satellites for habitat mapping? Remote Sens. Environ. 2020, 243, 111780. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Jonathan, L.; Claessens, H.; Lejeune, P. Mapping of riparian invasive species with supervised classification of Unmanned Aerial System (UAS) imagery. Int. J. Appl. Earth Obs. Geoinform. 2016, 44, 88–94. [Google Scholar] [CrossRef]
- Larrinaga, A.R.; Brotons, L. Greenness Indices from a Low-Cost UAV Imagery as Tools for Monitoring Post-Fire Forest Recovery. Drones 2019, 3, 6. [Google Scholar] [CrossRef]
- McKenna, P.B.; Lechner, A.M.; Hernandez Santin, L.; Phinn, S.; Erskine, P.D. Measuring and monitoring restored ecosystems: Can remote sensing be applied to the ecological recovery wheel to inform restoration success? Restor. Ecol. 2023, 31, e13724. [Google Scholar] [CrossRef]
- Buters, T.M.; Bateman, P.W.; Robinson, T.; Belton, D.; Dixon, K.W.; Cross, A.T. Methodological ambiguity and Inconsistency constrain unmanned aerial vehicles as a silver bullet for monitoring ecological restoration. Remote Sens. 2019, 11, 1180. [Google Scholar] [CrossRef]
- Phinn, S.R.; Stow, D.A.; Franklin, J.; Mertes, L.A.K.; Michaelsen, J. Remotely sensed data for ecosystem analyses: Combining hierarchy theory and scene models. Environ. Manag. 2003, 31, 429–441. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Townsend, P.A.; Gross, J.E.; Cohen, W.B.; Bolstad, P.; Wang, Y.Q.; Adams, P. Remote sensing change detection tools for natural resource managers: Understanding concepts and tradeoffs in the design of landscape monitoring projects. Remote Sens. Environ. 2009, 113, 1382–1396. [Google Scholar] [CrossRef]
- Fassnacht, K.S.; Cohen, W.B.; Spies, T.A. Key Issues in making and using satellite-based maps in ecology: A primer. For. Ecol. Manag. 2006, 222, 167–181. [Google Scholar] [CrossRef]
- Ustin, S.L.; Middleton, E.M. Current and near-term advances in Earth observation for ecological applications. Ecol. Process. 2021, 10, 1. [Google Scholar] [CrossRef]
- Gann, G.D.; McDonald, T.; Walder, B.; Aronson, J.; Nelson, C.R.; Jonson, J.; Hallett, J.G.; Eisenberg, C.; Guariguata, M.R.; Liu, J.; et al. International Principles and Standards for the Practice of Ecological Restoration. Second Edition. Restor. Ecol. 2019, 27, S1–S46. [Google Scholar] [CrossRef]
- Bruzzone, L.; Demir, B. A review of modern approaches to classification of remote sensing data. In Land Use and Land Cover Mapping in Europe; Springer: Dordrecht, The Netherlands, 2014; pp. 127–143. [Google Scholar]
- Yu, L.; Liang, L.; Wang, J.; Zhao, Y.; Cheng, Q.; Hu, L.; Liu, S.; Yu, L.; Wang, X.; Zhu, P.; et al. Meta-discoveries from a synthesis of satellite-based land-cover mapping research. Int. J. Remote Sens. 2014, 35, 4573–4588. [Google Scholar] [CrossRef]
- Al-Ali, Z.M.; Abdullah, M.M.; Asadalla, N.B.; Gholoum, M. A comparative study of remote sensing classification methods for monitoring and assessing desert vegetation using a UAV-based multispectral sensor. Environ. Monit. Assess. 2020, 192, 389. [Google Scholar] [CrossRef] [PubMed]
- Adam, E.; Mutanga, O.; Odindi, J.; Abdel-Rahman, E.M. Land-use/cover classification in a heterogeneous coastal landscape using Rapid Eye imagery: Evaluating the performance of random forest and support vector machines classifiers. Int. J. Remote Sens. 2014, 35, 3440–3458. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Foody, G.M.; Mathur, A. The use of small training sets containing mixed pixels for accurate hard image classification: Training on mixed spectral responses for classification by a SVM. Remote Sens. Environ. 2006, 103, 179–189. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support vector machine versus random forest for remote sensing image classification: A meta-analysis and systematic review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Chu, D. Fractional Vegetation Cover. In Remote Sensing of Land Use and Land Cover in Mountain Region, 2nd ed.; Liang, S., Wang, J., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 477–510. ISBN 978-0-12-815826-5. [Google Scholar]
- Herrick, J.E.; Schuman, G.E.; Rango, A. Monitoring ecological processes for restoration projects. J. Nat. Conserv. 2006, 14, 161–171. [Google Scholar] [CrossRef]
- Warkentin, K.; Stow, D.; Uyeda, K.; O’Leary, J.; Lambert, J.; Loerch, A.; Coulter, L. Shrub fractional cover estimation and mapping of San Clemente Island shrubland based on airborne multispectral imagery and lidar data. Remote Sens. 2020, 12, 3608. [Google Scholar] [CrossRef]
- Wiens, J.A. Spatial scaling in ecology. Funct. Ecol. 1989, 3, 385–397. [Google Scholar] [CrossRef]
- Lindenmayer, D.; Hobbs, R.J.; Montague-Drake, R.; Alexandra, J.; Bennett, A.; Burgman, M.; Cale, P.; Calhoun, A.; Cramer, V.; Cullen, P.; et al. A checklist for ecological management of landscapes for conservation. Ecol. Lett. 2008, 11, 78–91. [Google Scholar] [CrossRef]
- Mitrovich, L.; Lockhart, S.; Sprague, D.W. Case Study: Cajon Creek Habitat Conservation Management Area. Tran. West. Sect. Wild. Soc. 1999, 35, 57–62. [Google Scholar]
- Hanes, T.L.; Friesen, R.D.; Keane, K. Alluvial scrub vegetation in coastal southern California. In California Riparian System Conference; USDA Forest Service General Technical Report PSW-110; USDA: Davis, CA, USA, 1989; pp. 187–193. [Google Scholar]
- Chock, R.Y.; McCullough Hennessy, S.; Wang, T.B.; Gray, E.; Shier, D.M. A multi-model approach to guide habitat conservation and restoration for the endangered San Bernardino kangaroo rat. Global Ecol. Conserv. 2020, 21, e00881. [Google Scholar] [CrossRef]
- Burk, J.H.; Eugene Jones, C.; Ryan, W.A.; Wheeler, J.A. Floodplain vegetation and soils along the upper Santa Ana River, San Bernardino County, California. Madroño 2007, 54, 126–137. [Google Scholar] [CrossRef]
- Cleland, E.E.; Funk, J.L.; Allen, E.B. Coastal sage scrub. In Ecosystems of California; Mooney, H.A., Zavaleta, E.S., Eds.; University of California Press: Oakland, CA, USA, 2016; pp. 429–448. [Google Scholar]
- Hamada, Y.; Stow, D.A.; Roberts, D.A. Estimating life-form cover fractions in California sage scrub communities using multispectral remote sensing. Remote Sens. Environ. 2011, 115, 3056–3068. [Google Scholar] [CrossRef]
- Lippitt, C.L.; Stow, D.A.; Roberts, D.A.; Coulter, L.L. Multidate MESMA for Monitoring Vegetation Growth Forms in Southern California Shrublands. Int. J. Remote Sens. 2018, 39, 655–683. [Google Scholar] [CrossRef]
- Hamada, Y.; Stow, D.A.; Franklin, J. Quantifying biological integrity of California sage scrub communities using plant life-form cover. J. Mediterr. Ecol. 2009, 10, 19–32. [Google Scholar]
- Martin, L.J.; Blossey, B.; Ellis, E. Mapping where ecologists work: Biases in the global distribution of terrestrial ecological observations. Front. Ecol. Environ. 2012, 10, 195–201. [Google Scholar] [CrossRef]
- Murphy, G.E.P.; Romanuk, T.N. Data gaps in anthropogenically driven local-scale species richness change studies across the Earth’s terrestrial biomes. Ecol. Evol. 2016, 6, 2938–2947. [Google Scholar] [CrossRef] [PubMed]
- Burk, J.H.; Jones, C.E.; Wheeler, J.; DeSimone, S. The Ecology of Eriastrum densifolium sanctorum (Milliken) Mason; Department of the Army, The Corps of Engineers (COE): Los Angeles, CA, USA, 1988. [Google Scholar]
- Hernandez, R.R.; Sandquist, D.R. A dam in the drylands: Soil geomorphic treatments facilitate recruitment of the endangered Santa Ana River woolly star. Ecosphere 2019, 10, e02621. [Google Scholar] [CrossRef]
- Smith, R.L. The Alluvial Scrub Vegetation of the San Gabriel River Floodplain; California State University: Fullerton, CA, USA, 1978. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Hijmans, R.J.; Bivand, R.; Forner, K.; Ooms, J.; Pebesma, E.; Sumner, M.D. Package “terra.”; Maintainer: Vienna, Austria, 2022. [Google Scholar]
- R Core Team R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023.
- Laliberte, A.S.; Browning, D.M.; Herrick, J.E.; Gronemeyer, P. Hierarchical object-based classification of ultra-high-resolution Digital Mapping Camera (DMC) imagery for rangeland mapping and assessment. J. Spat. Sci. 2010, 55, 101–115. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- ArcGIS Desktop Help Segment Mean Shift. Available online: https://pro.arcgis.com/en/pro-app/latest/help/analysis/raster-functions/segment-mean-shift-function.htm (accessed on 25 August 2023).
- Collins, J.; Dronova, I. Urban landscape change analysis using local climate zones and object-based classification in the Salt Lake metro region, Utah, USA. Remote Sens. 2019, 11, 1615. [Google Scholar] [CrossRef]
- Darwish, A.; Leukert, K.; Reinhardt, W. Image Segmentation for the Purpose of Object-based Classification. In Proceedings of the 2003 IEEE International Conference on Geoscience and Remote Sensing Symposium, IGARSS’03, Toulouse, France, 21–25 July 2003; IEEE International: Piscataway, NJ, USA, 2003; pp. 2039–2041. [Google Scholar]
- ArcGIS Desktop Help Classify. Available online: https://pro.arcgis.com/en/pro-app/latest/help/analysis/image-analyst/classify.htm (accessed on 25 August 2023).
- Hamada, Y.; Stow, D.A.; Roberts, D.A.; Franklin, J.; Kyriakidis, P.C. Assessing and monitoring semi-arid shrublands using object-based image analysis and multiple endmember spectral mixture analysis. Environ. Monit. Assess. 2013, 185, 3173–3190. [Google Scholar] [CrossRef]
- Gómez-Sapiens, M.; Schlatter, K.J.; Meléndez, Á.; Hernández-López, D.; Salazar, H.; Kendy, E.; Flessa, K.W. Improving the efficiency and accuracy of evaluating aridland riparian habitat restoration Using unmanned aerial vehicles. Remote Sens. Ecol. Conserv. 2021, 7, 488–503. [Google Scholar] [CrossRef]
- Corrêa, R.S.; Balduíno, A.P.d.C.; Teza, C.T.V.; Baptista, G.M.d.M. Vegetation cover development resulting from different restoration approaches of exploited mines. Floresta Ambient. 2018, 25, e20171116. [Google Scholar] [CrossRef]
- Dale, J.; Burnside, N.G.; Hill-Butler, C.; Berg, M.J.; Strong, C.J.; Burgess, H.M. The use of unmanned aerial vehicles to determine differences in vegetation cover: A tool for monitoring coastal wetland restoration schemes. Remote Sens. 2020, 12, 4022. [Google Scholar] [CrossRef]
- Park, I.W.; Hooper, J.; Flegal, J.M.; Jenerette, G.D. Impacts of climate, disturbance and topography on distribution of herbaceous cover in Southern California chaparral: Insights from a remote-sensing method. Divers. Distrib. 2018, 24, 497–508. [Google Scholar] [CrossRef]
- Franklin, J.; Davis, F.W.; Lefebvre, P. Thematic mapper analysis of tree cover in semiarid woodlands using a model of canopy shadowing. Remote Sens. Environ. 1991, 36, 189–202. [Google Scholar] [CrossRef]
- Schmidt, T.; Schuster, C.; Kleinschmit, B.; Förster, M. Evaluating an intra-annual time series for grassland classification—How many acquisitions and what seasonal origin are optimal? IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3428–3439. [Google Scholar] [CrossRef]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical study on UAV characteristics for precision agriculture applications and associated practical challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Malanson, G.P. Fire history and patterns of Venturan subassociations of Californian coastal sage scrub. Vegetatio 1984, 57, 121–128. [Google Scholar] [CrossRef]
- Westman, W.E. Diversity Relations and Succession in Californian Coastal Sage Scrub. Ecology 1981, 62, 170–184. [Google Scholar] [CrossRef]
- Diffendorfer, J.E.; Fleming, G.M.; Duggan, J.M.; Chapman, R.E.; Rahn, M.E.; Mitrovich, M.J.; Fisher, R.N. Developing Terrestrial, Multi-Taxon Indices of Biological Integrity: An Example from Coastal Sage Scrub. Biol. Conserv. 2007, 140, 130–141. [Google Scholar] [CrossRef]
- Dark, S.J.; Bram, D. The Modifiable Areal Unit Problem (MAUP) in Physical Geography. Prog. Phys. Geogr. 2007, 31, 471–479. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specifications |
|---|---|
| Date of image acquisition | April 2021 (RGB Composite) September 2021 (Multispectral) |
| Sensor type | Multispectral (Parrot Sequoia+) |
| Spectral bands|Wavelength|Bandwidth | Green: 550 nm ± 40 nm |
| Red: 660 nm ± 40 nm | |
| Red-Edge: 735 nm ± 10 nm | |
| Near-Infrared: 790 nm ± 40 nm | |
| Spatial resolution | 0.14 m |
| Field of view | Horizontal: 62° (Multispectral); 64° (RGB) Vertical: 49° (Multispectral); 50° (RGB) Diagonal: 74° (Multispectral and RGB) |
| Flying height | 400 feet (121.92 m) above ground level |
| Parameter | Description | Input Data |
|---|---|---|
| Input raster bands | Raster data used for segmentation | Green Red edge NDVI (NIR − Red)/(NIR + Red) |
| Spectral Detail | Controls the level of importance given to the spectral differences of objects. Values range from 1 to 20. Smaller values create spectrally smooth outputs, while higher spectral detail allows for greater discrimination between objects with similar spectral characteristics. | 20 |
| Spatial Detail | Controls the level of importance given to the proximity between objects. Values range from 1 to 20, where higher values allow for smaller, more clustered objects. | 15 |
| Minimum Segment Size | Controls the size of the smallest segment/object in pixels. | 20 |
| Classification Algorithm | Classes | Overall Accuracy (%) | Kappa Coefficient | Producer Accuracy (%) | User Accuracy (%) |
|---|---|---|---|---|---|
| Maximum Likelihood | Bare ground | 88.00 | 0.68 | 92.80 | 99.20 |
| Shrub | 50.00 | 100 | |||
| Grass | 92.68 | 40.00 | |||
| Random Forest | Bare ground | 97.60 | 0.93 | 98.00 | 100 |
| Shrub | 94.64 | 98.15 | |||
| Grass | 97.56 | 78.43 | |||
| Support Vector Machine | Bare ground | 96.40 | 0.89 | 97.52 | 99.75 |
| Shrub | 89.29 | 98.04 | |||
| Grass | 95.12 | 70.90 |
| 10 m | 25 m | 50 m | ||||
|---|---|---|---|---|---|---|
| Classification Algorithm | RMSE | MAE | RMSE | MAE | RMSE | MAE |
| Maximum Likelihood | 39.74 | 31.89 | 32.59 | 28.86 | 30.53 | 26.66 |
| Random Forest | 26.00 | 19.19 | 14.99 | 12.27 | 13.30 | 11.17 |
| Support Vector Machine | 25.87 | 19.61 | 14.55 | 12.24 | 12.85 | 10.80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rose, M.B.; Mills, M.; Franklin, J.; Larios, L. Mapping Fractional Vegetation Cover Using Unoccupied Aerial Vehicle Imagery to Guide Conservation of a Rare Riparian Shrub Ecosystem in Southern California. Remote Sens. 2023, 15, 5113. https://doi.org/10.3390/rs15215113
Rose MB, Mills M, Franklin J, Larios L. Mapping Fractional Vegetation Cover Using Unoccupied Aerial Vehicle Imagery to Guide Conservation of a Rare Riparian Shrub Ecosystem in Southern California. Remote Sensing. 2023; 15(21):5113. https://doi.org/10.3390/rs15215113
Chicago/Turabian StyleRose, Miranda Brooke, Mystyn Mills, Janet Franklin, and Loralee Larios. 2023. "Mapping Fractional Vegetation Cover Using Unoccupied Aerial Vehicle Imagery to Guide Conservation of a Rare Riparian Shrub Ecosystem in Southern California" Remote Sensing 15, no. 21: 5113. https://doi.org/10.3390/rs15215113
APA StyleRose, M. B., Mills, M., Franklin, J., & Larios, L. (2023). Mapping Fractional Vegetation Cover Using Unoccupied Aerial Vehicle Imagery to Guide Conservation of a Rare Riparian Shrub Ecosystem in Southern California. Remote Sensing, 15(21), 5113. https://doi.org/10.3390/rs15215113