
Study on the Potential of Oil Spill Monitoring in a Port Environment Using Optical Reflectance

 , , , , ,
, , , , ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The port environment is much more cluttered. The presence of algae, sediments, debris, and infrastructure like vessels and docks leads to shadows, waves, etc. This complicates the interpretation of the images and can lead to false positives.
- The thickness and size of the oil spill are considerably smaller than in coastal or marine environments.
- The turbidity of water must be high enough to act as a diffusely reflecting surface. Unlike in the marine environment, turbidity is generally low in port environments.
- In port environments, oil spills are more likely to be shaped as oil on top of the water than as emulsions, since spills should be detected as fast as possible (within a few minutes) and the formation of emulsions takes time (from a few hours to a few days).
- We propose a simple physical model to accurately estimate the thickness of oil samples. The estimated thickness can then further be used to estimate the total volume of an oil spill together with the oil spill boundary estimates. The developed method is invariant to changes in sensor type and illumination conditions. Based on this physical model, we propose a method to detect spilled oil. For this, artificial spectra of oil samples with varying thickness are generated based on the model, and on these samples, a supervised machine learning algorithm is trained to detect spilled oil.
- To validate the proposed approach, we performed laboratory experiments on a comprehensive hyperspectral dataset of oil samples (diesel oil, lubrication oil, fuel oil, and hydraulic oil) with varying thickness between 500 µm and 5000 µm using a spectroradiometer. The same experiments were repeated (different samples) using a hyperspectral camera in the SWIR region.
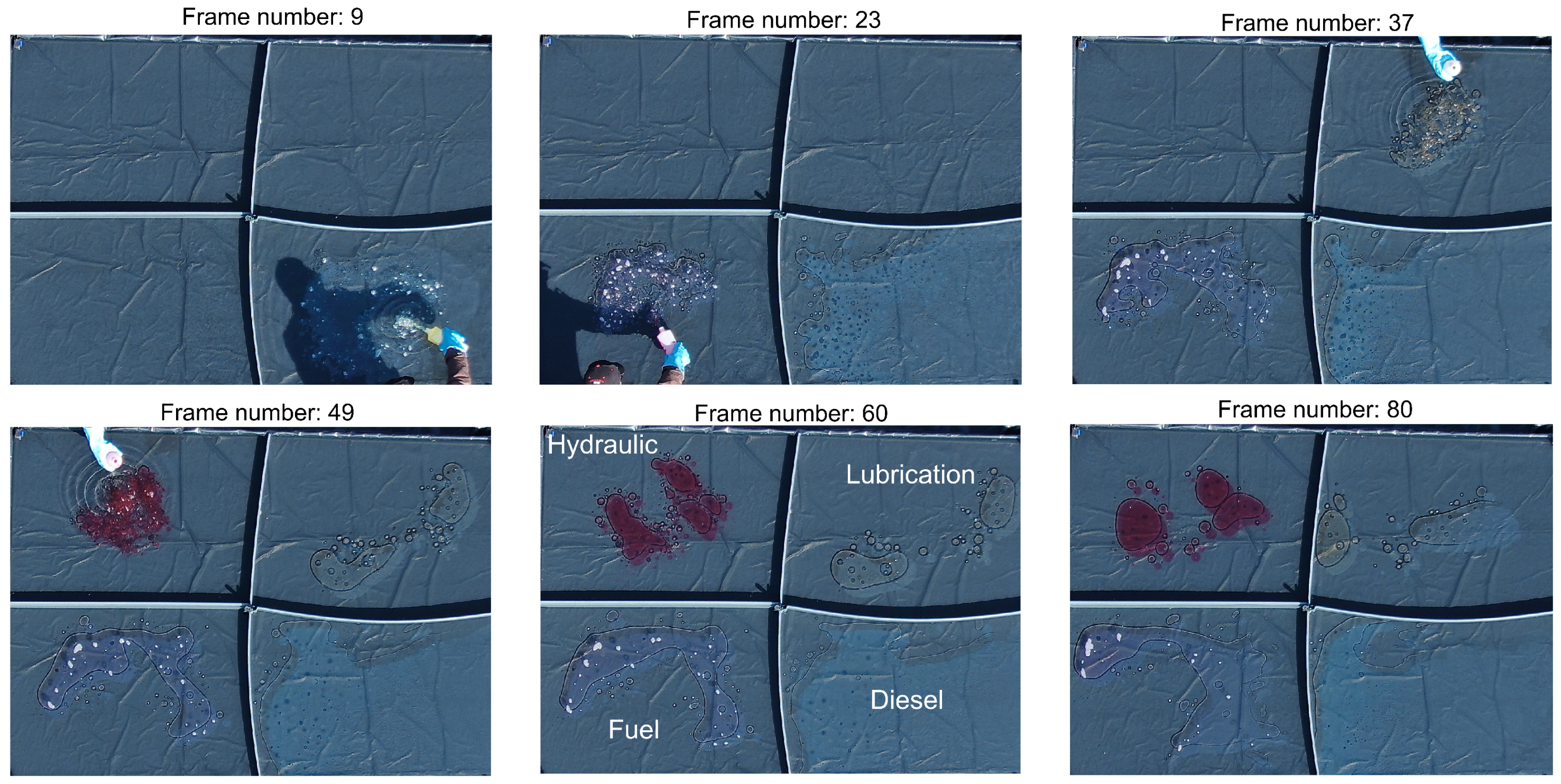
- To simulate realistic oil spill situations in port environments, we performed an extensive experiment in outdoor settings.
2. Methodology
3. Laboratory Experiments
3.1. Measuring the Oil Absorption Spectra
3.2. Oil Sample Preparation
3.3. Experimental Results
3.3.1. Estimating the Thickness of Oil with Hyperspectral Datasets
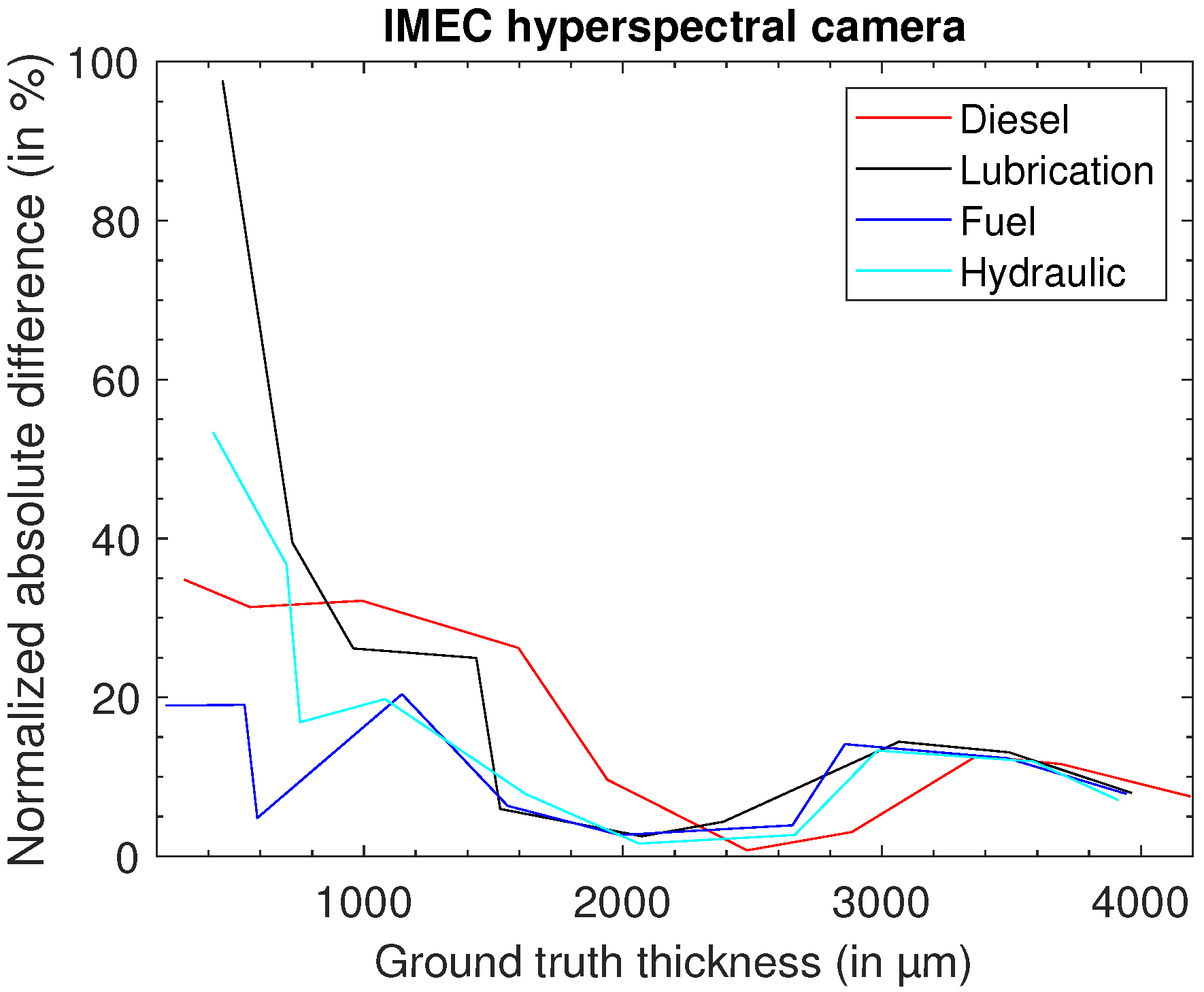
- The developed methodology was able to estimate the thickness of almost all oil samples from the datasets acquired in the SWIR wavelength region.
- For samples with thickness greater than 2000 µm, the error was 10% or less in the SWIR wavelength region. This demonstrates the potential of the proposed methodology.
- For samples with thickness lower than 2000 µm, the error was larger. This can be partially attributed to the uncertainty in the ground truth itself. While moving the samples during the measurement from the sensor location to the balance, small losses of oil regularly occurred. This introduced errors in the ground-truth thickness of the oil, especially for the thinner samples (thickness µm).
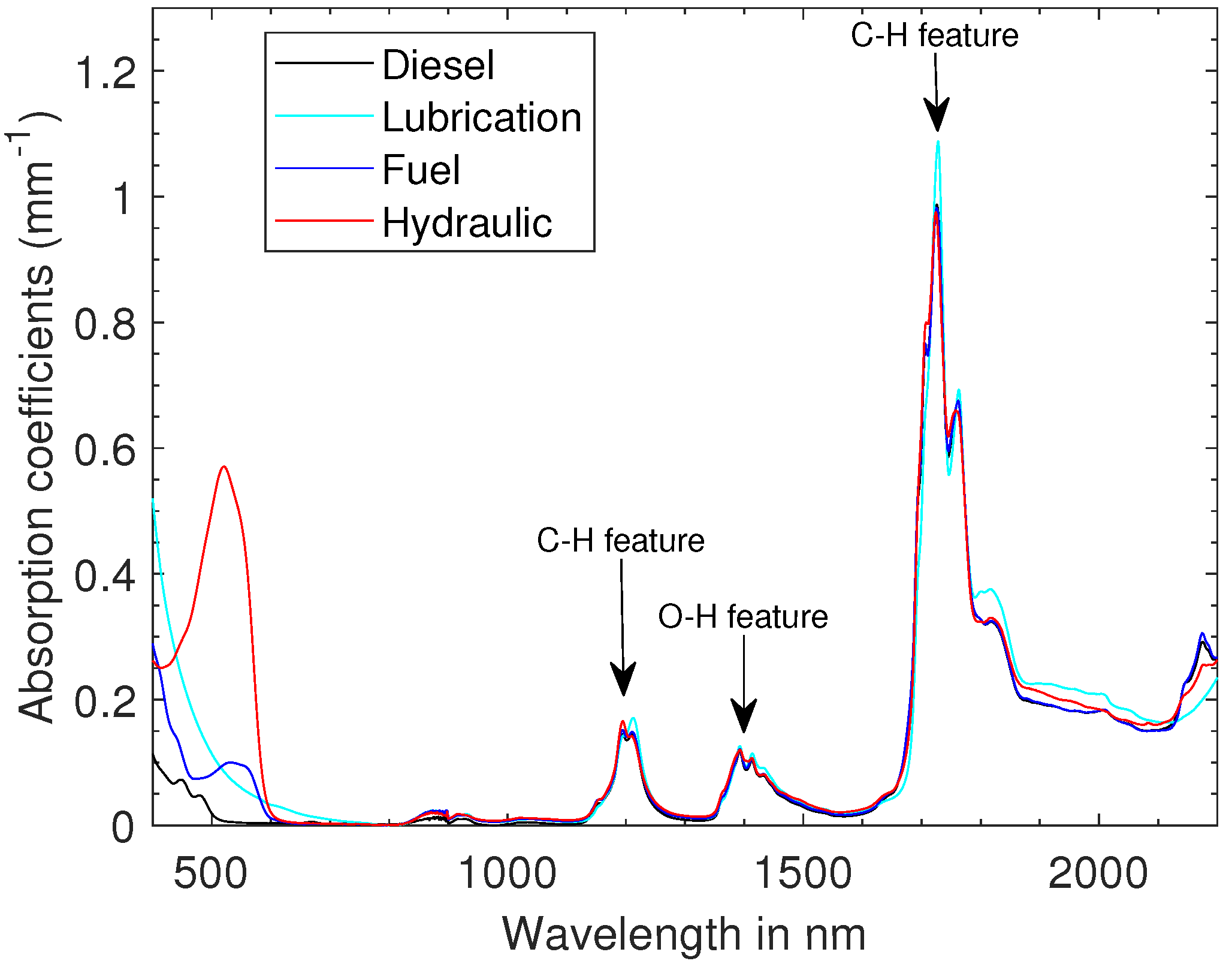
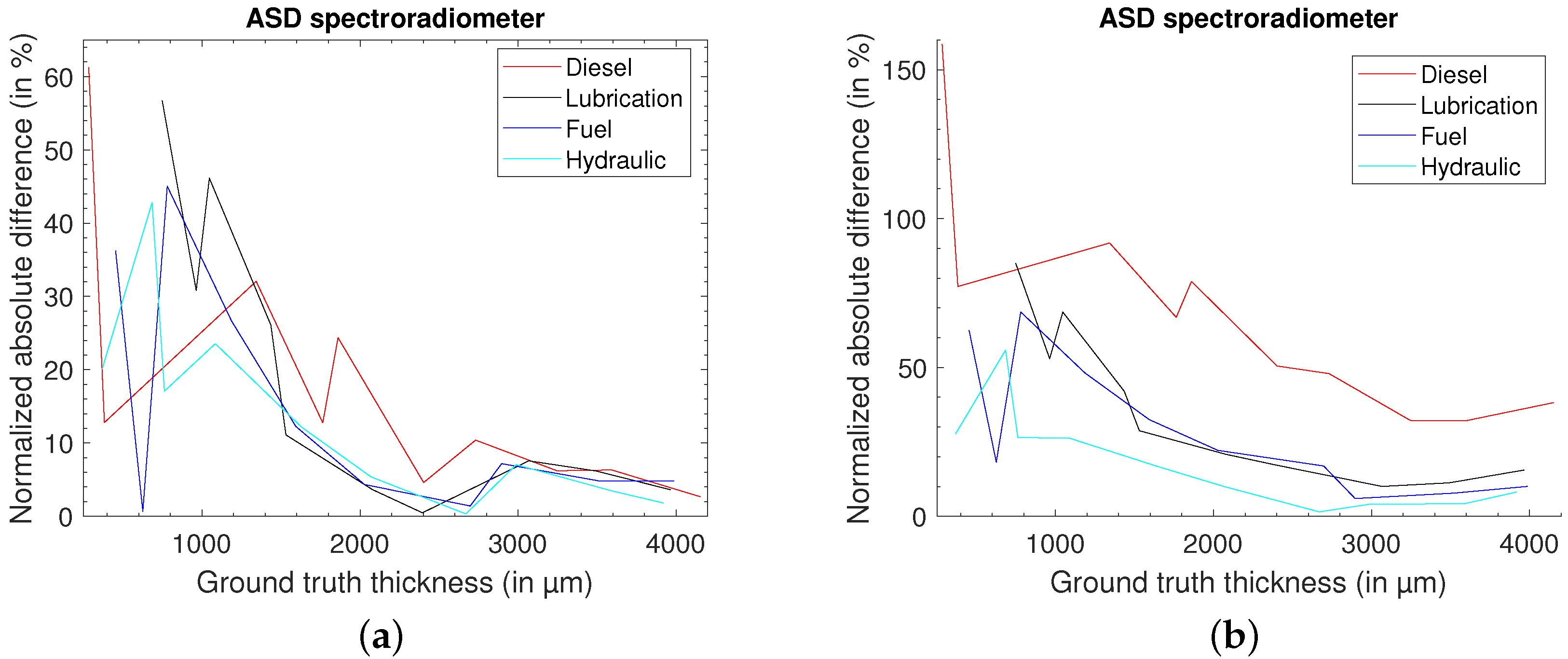
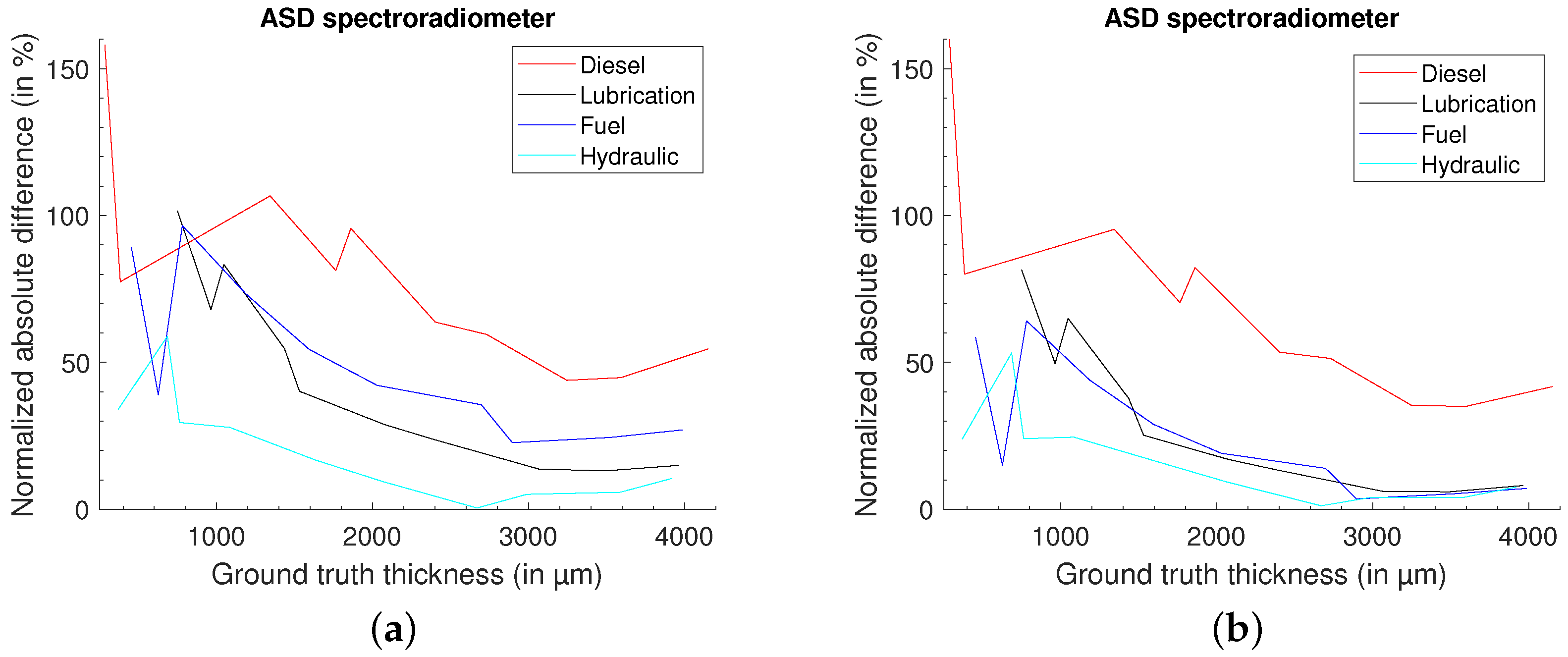
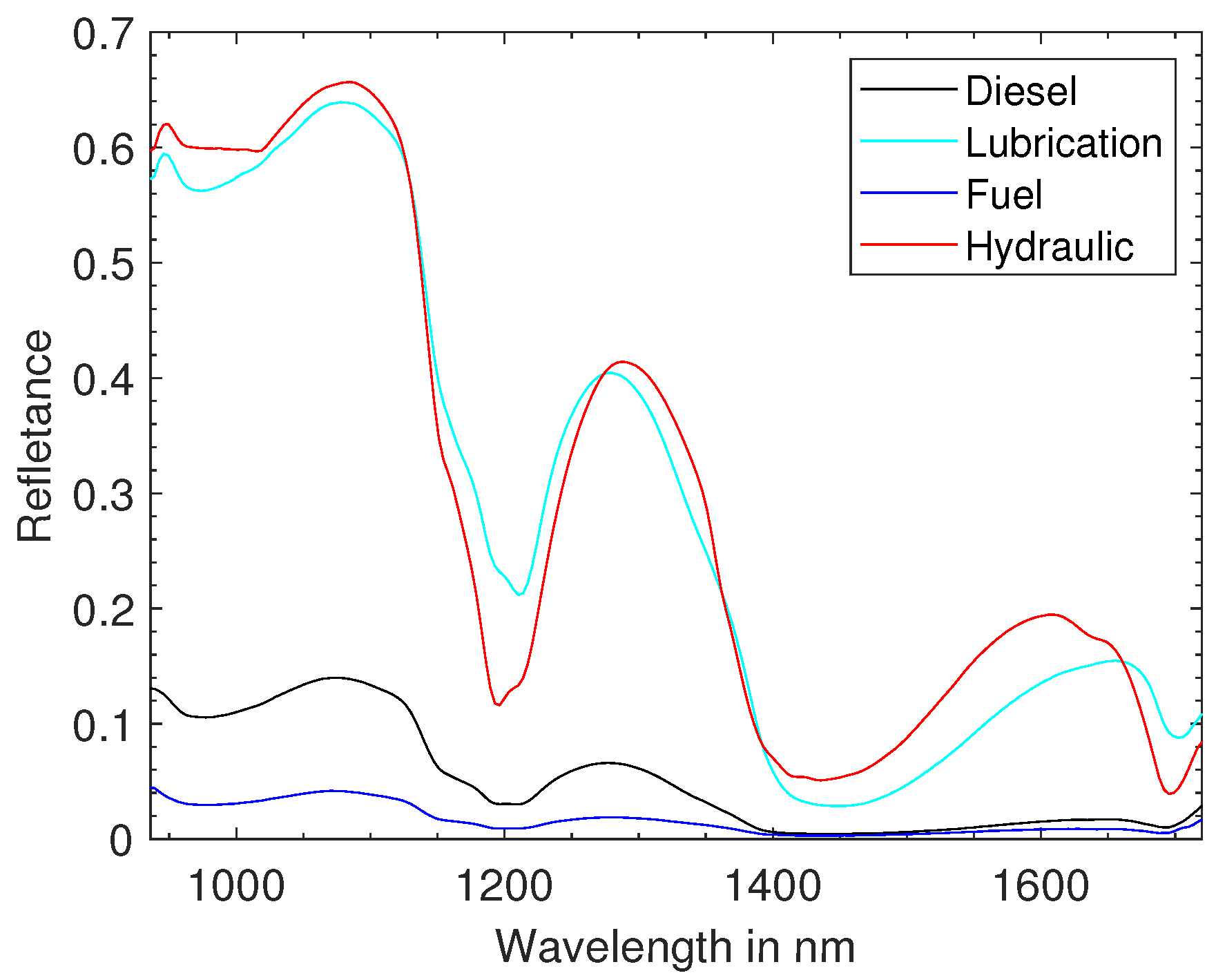
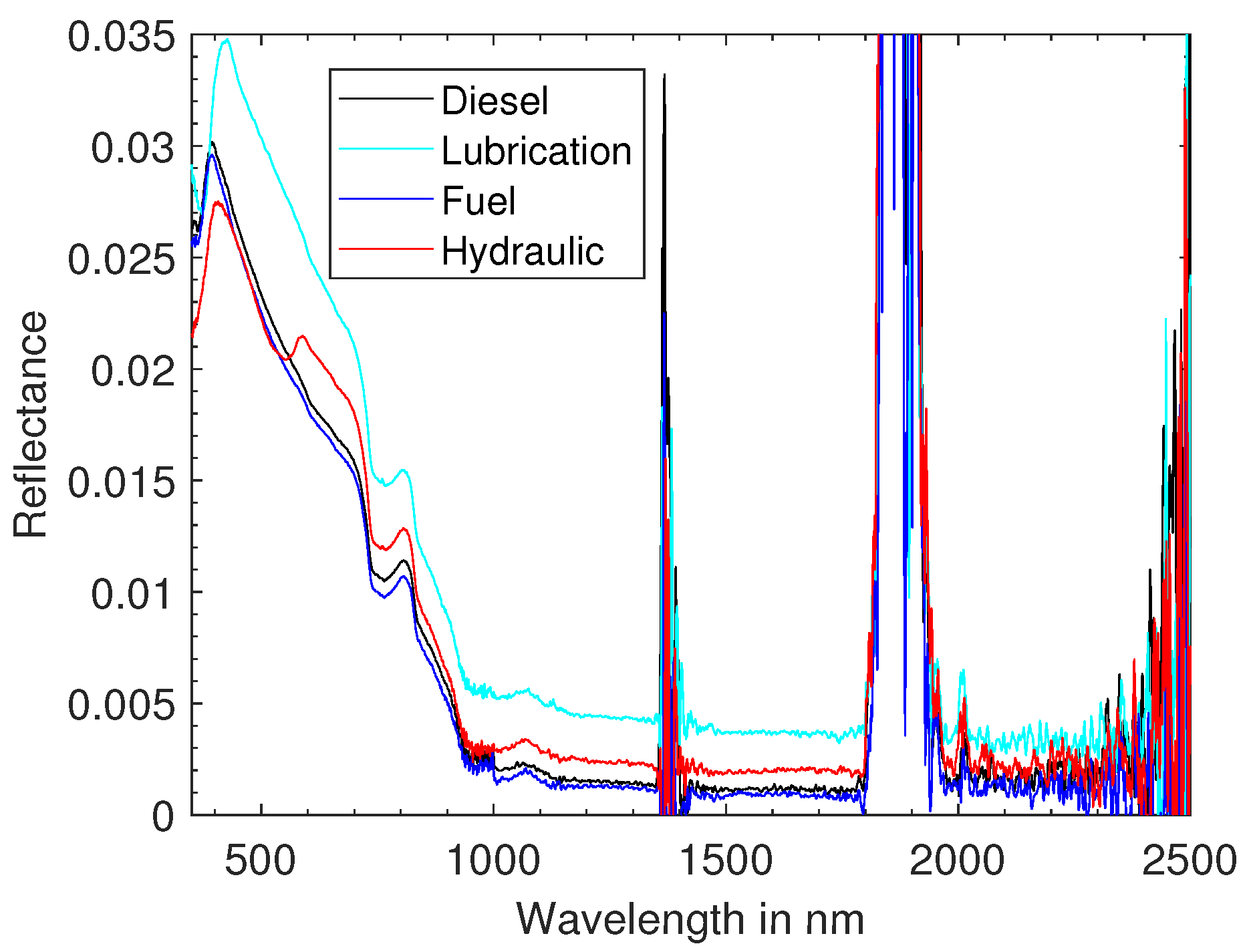
- As expected, the estimated thickness in the visible wavelength region was less accurate, especially for diesel oil. The best estimation in the visible wavelength region was that for hydraulic oil. This is due to the fact that it strongly absorbs incident light in the visible range (see Figure 2).
3.3.2. Simulating the Spectral Reflectance of the oil Samples in the Visible Wavelength Region
3.4. Oil–Water Emulsions
4. Outdoor Experiment
4.1. Detecting Oil in RGB Dataset
4.2. Estimating the Total Volume of Oil in RGB Dataset
5. Discussion
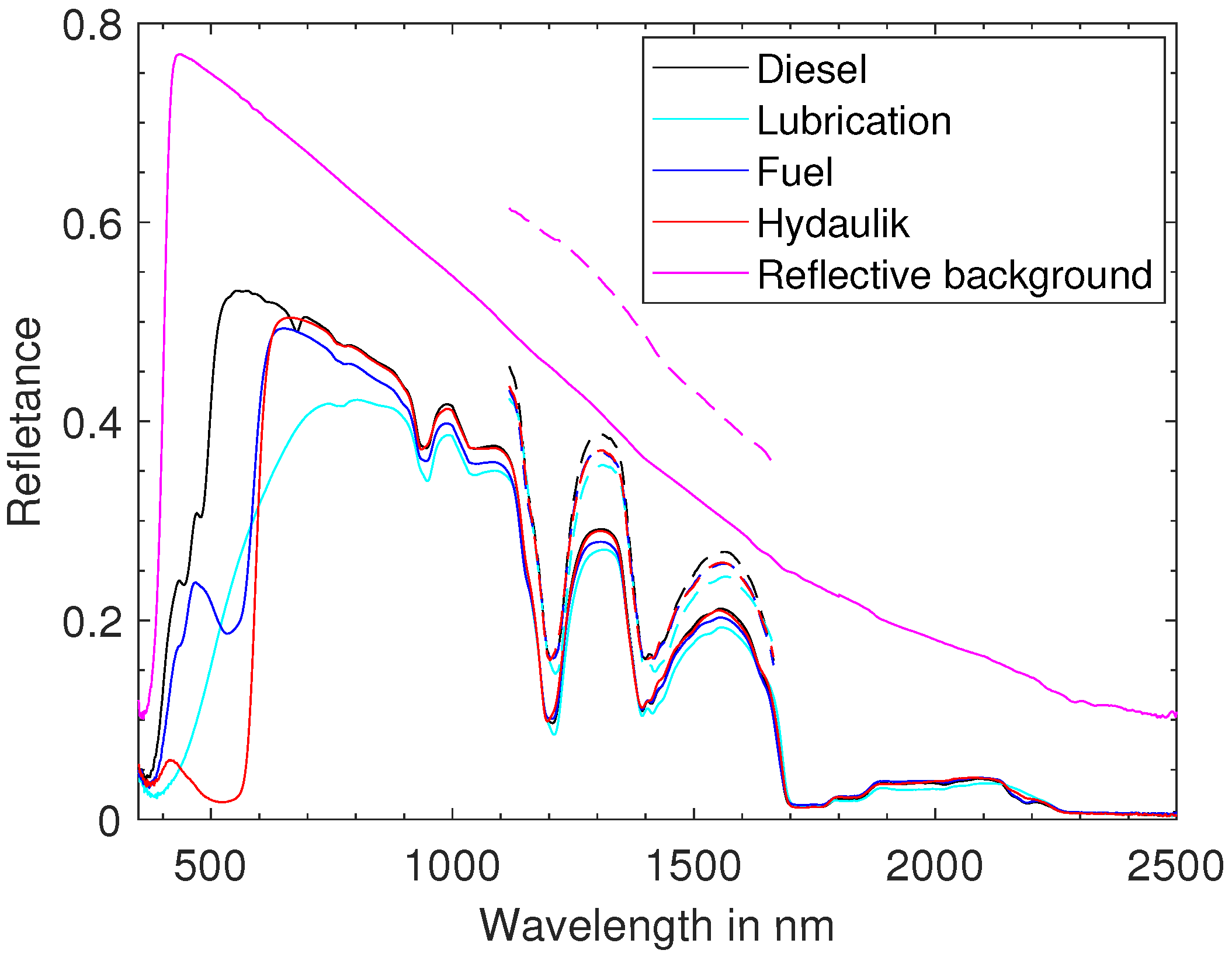
- The thickness of oil samples can be accurately (NAD < 10%) estimated in the SWIR wavelength region only when the background surface is highly reflective. In real-life scenarios, oil is spilled on top of water. Because of the strong absorption power of water in the SWIR wavelength region, the intensity measured with a hyperspectral sensor is extremely low (see Figure 10) and does not allow the oil to be detected or the thickness of the oil to be estimated.
- The absorption features of oil can be observed in emulsions prepared by homogeneously mixing oil with water (see Figure 9). In port environments, the probability of emulsion formation due to the mixing of spilled oil and water has yet to be investigated. An interesting future research direction is the development of a methodology that can accurately estimate the thickness of oil from emulsions.
- The oil samples that were studied in this work have specific absorption features in the visible wavelength region. Although this is beneficial, due to the low absorption coefficient values of lubrication oil and fuel oil, we require at least 2000 µm thick oil samples to accurately (NAD < 20%) estimate their thickness. Since hydraulic oil has higher absorption coefficient values in the visible wavelength regions, thinner samples of this oil can be processed. As can be observed in Figure 5 and Figure 7, the thickness of diesel oil cannot be accurately estimated in the visible wavelength region. Existing state-of-the-art methods utilize the specular properties of reflected light to infer the thickness of spilled oil. The major challenge for those methods is to differentiate between terrain spreading on water and oil. The proposed method, on the other hand, utilizes diffusely reflected light of the entire sample (oil + background) to estimate the thickness of spilled oil. The disadvantage of the proposed method is that it cannot accurately estimate the thickness of extremely thin oil samples.
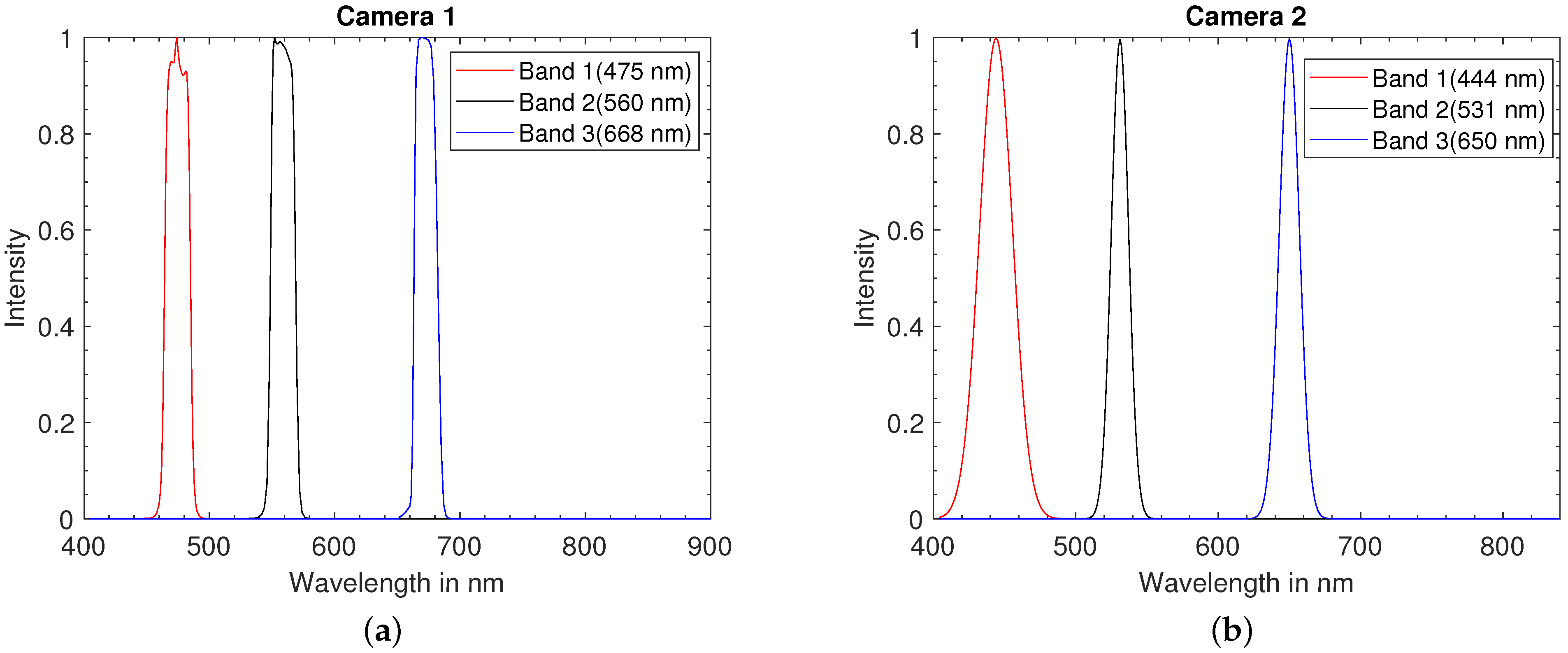
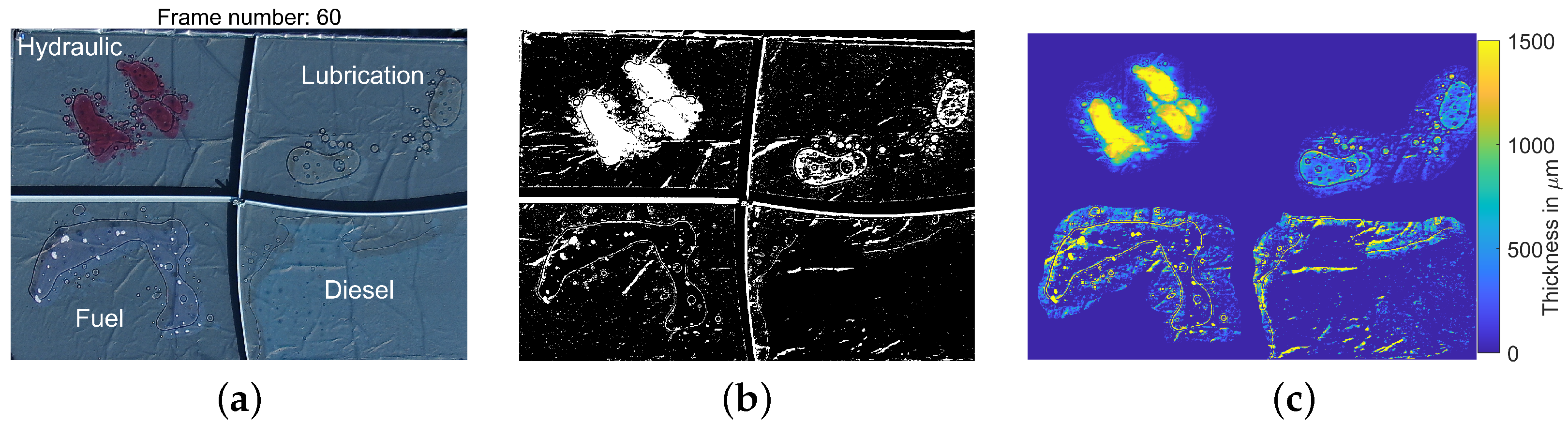
- In outdoor scenarios, the acquired data may be impaired by inconsistent illumination conditions. Due to the normalization of the spectra and calibration with the spectral response functions of the sensors, the proposed methodology tackles this and can accurately estimate the volume of artificially spilled hydraulic oil (see Figure 13d) in outdoor scenarios. Although the estimated volume of lubrication oil was consistent for several RGB images (see Figure 13b), the developed methodology underestimated the total spilled volume. It seems that the thickness of this spilled oil type is lower than 2000 µm, the minimum required thickness to accurately estimate it.
- The proposed method requires the spectral reflectance of the background and information regarding the incident angle () and the acquisition angle (). The spectral reflectance of the background can be generated by manually or automatically cropping a region in the scene where no oil spill occurs. On the other hand, and are obtained from the solar incident angle and the sensor’s position and orientation.
- Recently, several algorithms have been developed for oil-type identification using the reflectance spectrum. In [12], an algorithm was proposed to optimize three-band spectral indices for differentiating oil types. Although these types of algorithms are suitable for diffusely reflecting samples, our oil samples are non-diffusely reflecting materials, and their absorption spectra and the spectral reflectance of the background define the overall shape of the measured reflected light. From Figure 2, it is clear that all oil types have exactly the same absorption spectra in the shortwave infrared wavelength region, limiting the oil-species identification model to accurately differentiating them. However, in the visible wavelength region, the methodology proposed in [12] might be of help to differentiate different oil types according to their spectral reflectance. This will be the focus of our future work.
- Another interesting future research direction is to investigate the potential of the ultraviolet wavelength region to estimate the thickness of thinner oil samples.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Board, T.R.; Council, N.R. Oil in the Sea III: Inputs, Fates, and Effects; The National Academies Press: Washington, DC, USA, 2003. [Google Scholar]
- Wettle, M.; Daniel, P.J.; Logan, G.A.; Thankappan, M. Assessing the effect of hydrocarbon oil type and thickness on a remote sensing signal: A sensitivity study based on the optical properties of two different oil types and the HYMAP and Quickbird sensors. Remote Sens. Environ. 2009, 113, 2000–2010. [Google Scholar] [CrossRef]
- Solberg, A.H.S. Remote Sensing of Ocean Oil-Spill Pollution. Proc. IEEE 2012, 100, 2931–2945. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. A Review of Oil Spill Remote Sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef] [PubMed]
- Viallefont-Robinet, F.; Angelliaume, S.; Roupioz, L.; Mainvis, A.; Caillault, K.; Dartigalongue, T.; Foucher, P.Y.; Miegebielle, V.; Dubucq, D. Health security and environment capability of slick detection, characterization, and quantification in the offshore domain thanks to radar or optical imagery. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions, Strasbourg, France, 9–10 September 2019; Volume 11150, p. 111500I. [Google Scholar]
- Mihoub, Z.; Hassini, A. Remote sensing of marine oil spills using Sea-viewing Wide Field-of-View Sensor images. Boll. Geofis. Teor. Appl. 2019, 60, 123–136. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.; Gibril, M.B.A.; Shanableh, A.; Kais, A.; Hamed, O.; Al-Mansoori, S.; Khalil, M.A. Sensors, Features, and Machine Learning for Oil Spill Detection and Monitoring: A Review. Remote Sens. 2020, 12, 3338. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Wan, J.; Ma, Y.; Zhang, J.; Hu, Y. Characterization analysis and identification of common marine oil spill types using hyperspectral remote sensing. Int. J. Remote Sens. 2020, 41, 7163–7185. [Google Scholar] [CrossRef]
- Li, Y.; Yu, Q.; Xie, M.; Zhang, Z.; Ma, Z.; Cao, K. Identifying Oil Spill Types Based on Remotely Sensed Reflectance Spectra and Multiple Machine Learning Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9071–9078. [Google Scholar] [CrossRef]
- Xie, M.; Dong, S.; Gou, T.; Li, Y.; Han, B. Evaluation and optimization of the three-band spectral indices for oil type identification using reflection spectrum. J. Quant. Spectrosc. Radiat. Transf. 2023, 304, 108609. [Google Scholar] [CrossRef]
- Kieu, H.T.; Law, A.W.K. Determination of surface film thickness of heavy fuel oil using hyperspectral imaging and deep neural networks. Int. J. Remote Sens. 2022, 43, 997–1014. [Google Scholar] [CrossRef]
- Hu, C.; Lu, Y.; Sun, S.; Liu, Y. Optical Remote Sensing of Oil Spills in the Ocean: What Is Really Possible? J. Remote Sens. 2021, 2021, 9141902. [Google Scholar] [CrossRef]
- Clark, R.N.; Curchin, J.M.; Hoefen, T.M.; Swayze, G.A. Reflectance spectroscopy of organic compounds: 1. Alkanes. J. Geophys. Res. Planets 2009, 114, E3. [Google Scholar] [CrossRef]
- Lammoglia, T.; de Souza Filho, C.R. Spectroscopic characterization of oils yielded from Brazilian offshore basins: Potential applications of remote sensing. Remote Sens. Environ. 2011, 115, 2525–2535. [Google Scholar] [CrossRef]
- Owens, E.H.; Taylor, E.; Parker, H.A. 1-Spill site characterization in environmental forensic investigations. In Standard Handbook Oil Spill Environmental Forensics, 2nd ed.; Stout, S.A., Wang, Z., Eds.; Academic Press: Boston, MA, USA, 2016; pp. 1–24. [Google Scholar]
- Swayze, G.A.; Furlong, E.T.; Livo, K.E. Mapping Pollution Plumes in Areas Impacted by Hurricane Katrina with Imaging Spectroscopy. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 10–14 December 2007; Volume 2007, p. H31L-07. [Google Scholar]
- Clark, R.N.; Swayze, G.A.; Leifer, I.; Livo, K.E.; Kokaly, R.F.; Hoefen, T.; Lundeen, S.; Eastwood, M.; Green, R.O.; Pearson, N.; et al. A Method for Quantitative Mapping of Thick Oil Spills Using Imaging Spectroscopy; Technical Report; USGS: Reston, VA, USA, 2010. [Google Scholar]
- Lu, Y.; Shi, J.; Wen, Y.; Hu, C.; Zhou, Y.; Sun, S.; Zhang, M.; Mao, Z.; Liu, Y. Optical interpretation of oil emulsions in the ocean—Part I: Laboratory measurements and proof-of-concept with AVIRIS observations. Remote Sens. Environ. 2019, 230, 111183. [Google Scholar] [CrossRef]
- D Carolis, G.; Adamo, M.; Pasquariello, G. On the Estimation of Thickness of Marine Oil Slicks From Sun-Glittered, Near-Infrared MERIS and MODIS Imagery: The Lebanon Oil Spill Case Study. IEEE Trans. Geosci. Remote Sens. 2014, 52, 559–573. [Google Scholar] [CrossRef]
- Sicot, G.; Lennon, M.; Miegebielle, V.; Dubucq, D. Estimation of the thickness and emulsion rate of oil spilled at sea using hyperspectral remote sensing imagery in the swir domain. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 445–450. [Google Scholar] [CrossRef]
- Niu, Y.; Shen, Y.; Chen, Q.; Liu, X. Applicability of spectral indices on thickness identification of oil slick. In Proceedings of the International Symposium on Optoelectronic Technology and Application 2016, Beijing, China, 9–11 May 2016; Volume 10156, p. 101561Q, Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series. [Google Scholar]
- Von Kubelka, P. Ein Beitrag zur Optik der Farbanstriche. Z. Tech. Phys. 1931, 12, 593–601. [Google Scholar]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koirala, B.; Mboga, N.; Moelans, R.; Knaeps, E.; Sels, S.; Winters, F.; Samsonova, S.; Vanlanduit, S.; Scheunders, P. Study on the Potential of Oil Spill Monitoring in a Port Environment Using Optical Reflectance. Remote Sens. 2023, 15, 4950. https://doi.org/10.3390/rs15204950
Koirala B, Mboga N, Moelans R, Knaeps E, Sels S, Winters F, Samsonova S, Vanlanduit S, Scheunders P. Study on the Potential of Oil Spill Monitoring in a Port Environment Using Optical Reflectance. Remote Sensing. 2023; 15(20):4950. https://doi.org/10.3390/rs15204950
Chicago/Turabian StyleKoirala, Bikram, Nicholus Mboga, Robrecht Moelans, Els Knaeps, Seppe Sels, Frederik Winters, Svetlana Samsonova, Steve Vanlanduit, and Paul Scheunders. 2023. "Study on the Potential of Oil Spill Monitoring in a Port Environment Using Optical Reflectance" Remote Sensing 15, no. 20: 4950. https://doi.org/10.3390/rs15204950
APA StyleKoirala, B., Mboga, N., Moelans, R., Knaeps, E., Sels, S., Winters, F., Samsonova, S., Vanlanduit, S., & Scheunders, P. (2023). Study on the Potential of Oil Spill Monitoring in a Port Environment Using Optical Reflectance. Remote Sensing, 15(20), 4950. https://doi.org/10.3390/rs15204950