
Automatic Detection of Subglacial Water Bodies in the AGAP Region, East Antarctica, Based on Short-Time Fourier Transform
 ,
,
Abstract
1. Introduction
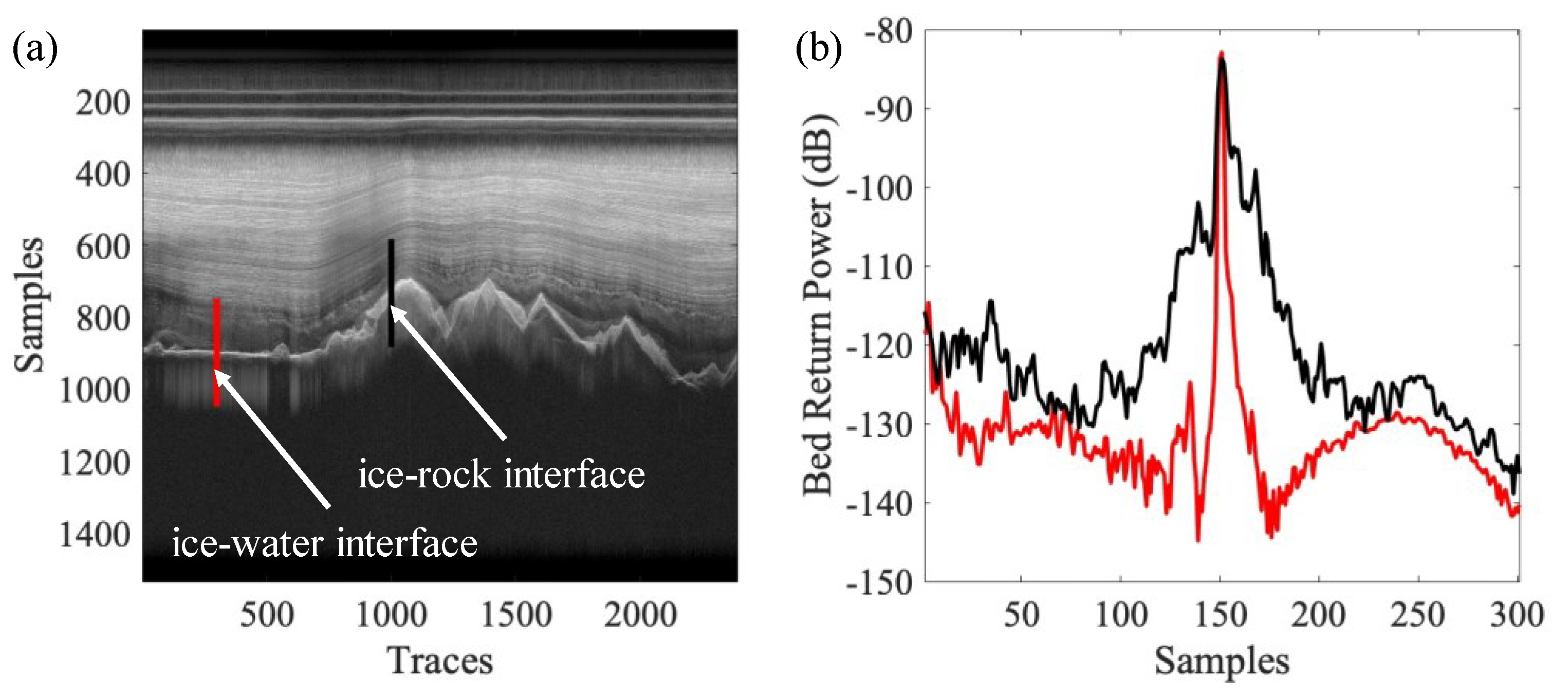
2. Characteristics of the Basal Interface
3. Materials and Methods
3.1. Survey Area and Data
3.2. Method
3.2.1. Along-Track Smoothing
3.2.2. Banding
3.2.3. Waveform Reforming
3.2.4. Short-Time Fourier Transform
4. Results
5. Discussion and Conclusions
- (1)
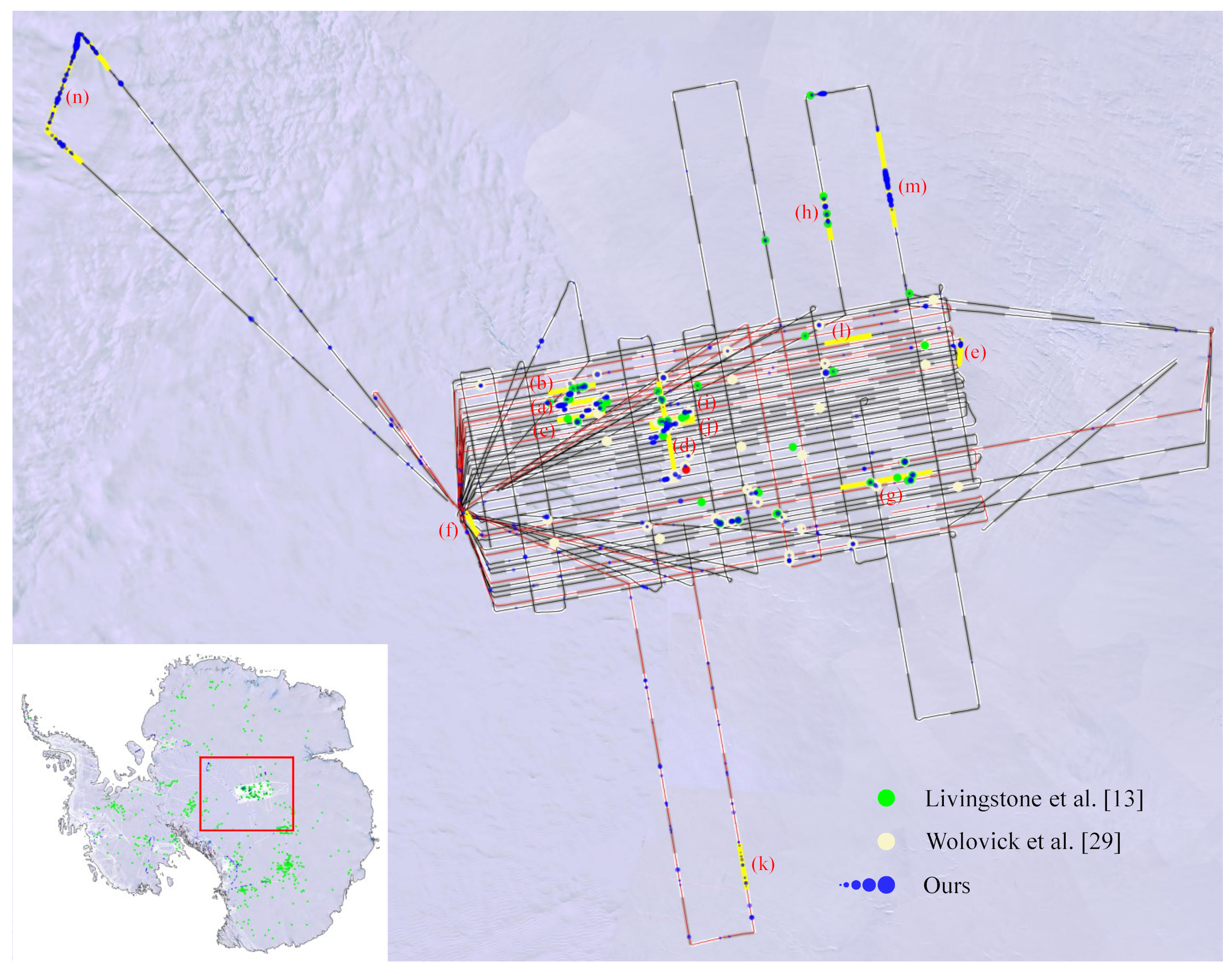
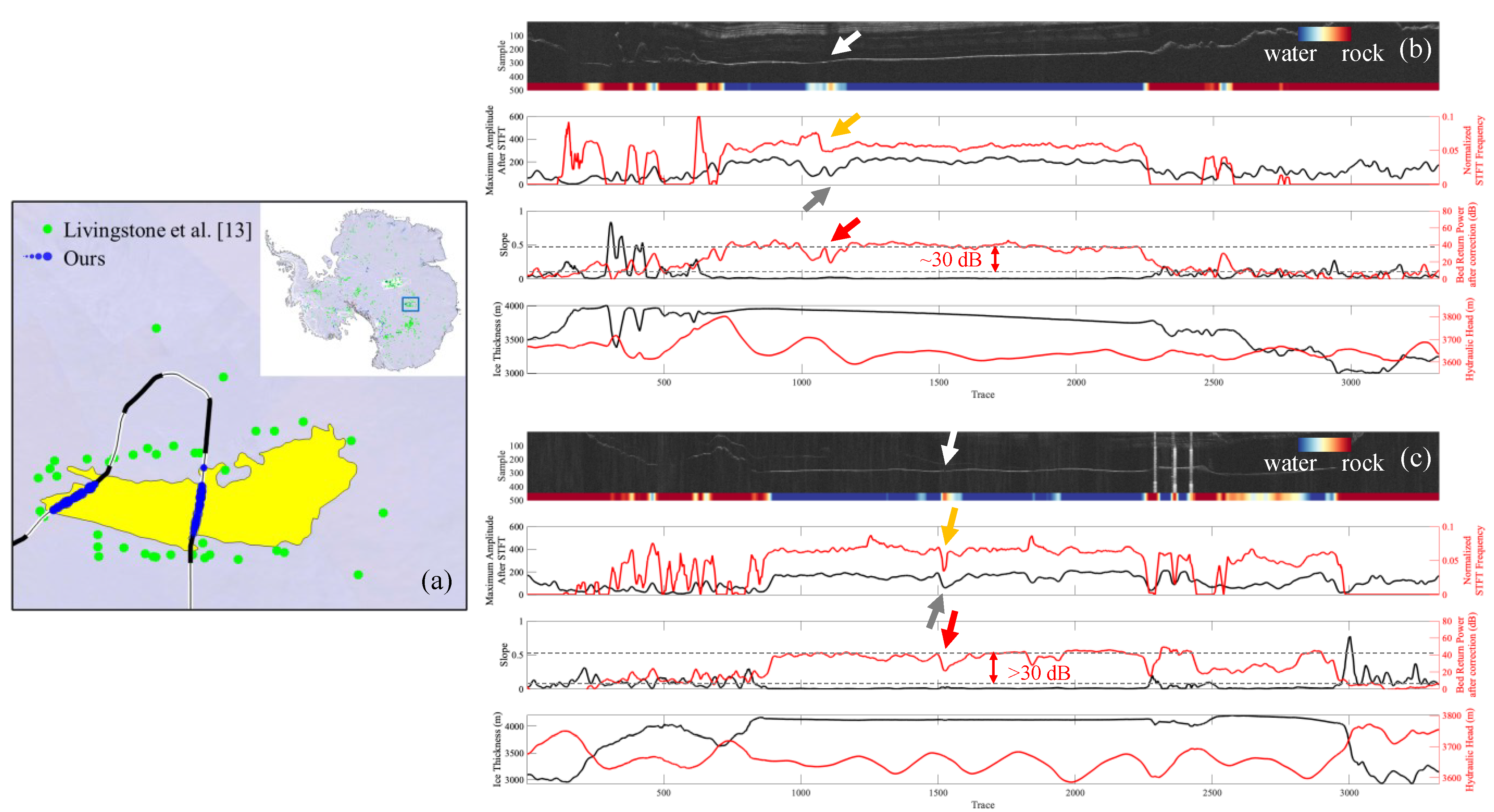
- In terms of subglacial water bodies identification, the proposed method has the highest possible along-track resolution since it is implemented at the A-scope level. Compared with traditional methods, the proposed method is more effective at identifying the shape of the A-scope at the basal interface, i.e., the leading and trailing edges; hence, all the subglacial water bodies with an along-track length over 2 km in Wolovick’s inventory [29] are successfully detected by the proposed method. Moreover, five large subglacial water bodies, in Figure 7a,e,m, and more potential water body candidates, as seen in Figure 7c–e,h,j, are newly identified by the proposed method. It is worth mentioning that the threshold used in this paper is determined according to the published subglacial water bodies, which is very important for the identification of subglacial water bodies. The selection of boundaries of the subglacial water body by the proposed method tends to be more conservative and more accurate, as seen in Figure 7a, since it is implemented for each A-scope.
- (2)
- The proposed method has limitations in the detection of subglacial channels or small subglacial water bodies, which are too short in terms of its along-track length, due to the along-track smoothing operation [59]. As shown in Figure 8, the undetected subglacial water bodies are mostly subglacial channels with a length of less than 500 m.
- (3)
- The proposed method shows greater potential for the identification of basal material classification in subglacial non-water regions. The proposed method shows high accuracy for the identification of bedrock. The sedimental-like edges that gradually transit to bedrocks on both sides of the water region can also be well described by proposed method. A large sediment area is successfully identified by our method, as shown in Figure 7n, which has not been reportedly detected by traditional methods.
- (4)
- Similar to the traditional methods, freeze-on ice also has an impact on the identification of subglacial water bodies by the proposed method. The freeze-on ice can cause other peaks to appear next to the main peak, leading to the mis-selection of the main peak range, and thus the misinterpretation of the amplitude and frequency of the true basal interface in the radargram. This may be improved if the width of banding is reduced to exclude the freeze-on ice regions, however, this may be difficult since the freeze-on ice region is normally next to the basal interface and varies case by case.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schlegel, N.J.; Seroussi, H.; Schodlok, M.P.; Larour, E.Y.; Boening, C.; Limonadi, D.; Watkins, M.M.; Morlighem, M.; van den Broeke, M.R. Exploration of Antarctic Ice Sheet 100-year contribution to sea level rise and associated model uncertainties using the ISSM framework. Cryosphere 2018, 12, 3511–3534. [Google Scholar] [CrossRef]
- Pattyn, F.; Ritz, C.; Hanna, E.; Asay-Davis, X.; DeConto, R.; Durand, G.; Favier, L.; Fettweis, X.; Goelzer, H.; Golledge, N.R.; et al. The Greenland and Antarctic ice sheets under 1.5 °C global warming. Nat. Clim. Chang. 2018, 8, 1053–1061. [Google Scholar] [CrossRef]
- Bell, R.E. The role of subglacial water in ice-sheet mass balance. Nat. Geosci. 2008, 1, 8. [Google Scholar] [CrossRef]
- Wingham, D.J.; Siegert, M.J.; Shepherd, A.; Muir, A.S. Rapid discharge connects Antarctic subglacial lakes. Nature 2006, 440, 1033–1036. [Google Scholar] [CrossRef] [PubMed]
- Siegert, M.J.; Ross, N.; Le Brocq, A.M. Recent advances in understanding Antarctic subglacial lakes and hydrology. Philos. Trans. A Math Phys. Eng. Sci. 2016, 374, 20140306. [Google Scholar] [CrossRef] [PubMed]
- Schroeder, D.M.; Blankenship, D.D.; Young, D.A.; Quartini, E. Evidence for elevated and spatially variable geothermal flux beneath the West Antarctic Ice Sheet. Proc. Natl. Acad. Sci. USA 2014, 111, 9070–9072. [Google Scholar] [CrossRef] [PubMed]
- Diez, A.; Matsuoka, K.; Jordan, T.A.; Kohler, J.; Ferraccioli, F.; Corr, H.F.; Olesen, A.V.; Forsberg, R.; Casal, T.G. Patchy Lakes and Topographic Origin for Fast Flow in the Recovery Glacier System, East Antarctica. J. Geophys. Res. Earth Surf. 2019, 124, 287–304. [Google Scholar] [CrossRef]
- Schroeder, D.M.; Bingham, R.G.; Blankenship, D.D.; Christianson, K.; Eisen, O.; Flowers, G.E.; Karlsson, N.B.; Koutnik, M.R.; Paden, J.D.; Siegert, M.J. Five decades of radioglaciology. Ann. Glaciol. 2020, 61, 1–13. [Google Scholar] [CrossRef]
- Popov, S. Ice Cover, Subglacial Landscape, and Estimation of Bottom Melting of Mac. Robertson, Princess Elizabeth, Wilhelm II, andWestern Queen Mary Lands, East Antarctica. Remote Sens. 2022, 14, 241. [Google Scholar] [CrossRef]
- Robin, G.Q.; Swithinbank, C.; Smith, B. Radio Echo Exploration of the Antarctic Ice Sheet. IASH Publication 86; International Symposium on Antarctic Glaciological Exploration (ISAGE): Hanover, NH, USA, 1968. [Google Scholar]
- Thakur, S.; Donini, E.; Bovolo, F.; Bruzzone, L. An Approach to the Assessment of Detectability of Subsurface Targets in Polar Ice From Satellite Radar Sounders. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–21. [Google Scholar] [CrossRef]
- Wright, A.; Siegert, M. A fourth inventory of Antarctic subglacial lakes. Antarct. Sci. 2012, 24, 659–664. [Google Scholar] [CrossRef]
- Livingstone, S.J.; Li, Y.; Rutishauser, A.; Sanderson, R.J.; Winter, K.; Mikucki, J.A.; Björnsson, H.; Bowling, J.S.; Chu, W.; Dow, C.F.; et al. Subglacial lakes and their changing role in a warming climate. Nat. Rev. Earth Environ. 2022, 3, 106–124. [Google Scholar] [CrossRef]
- Siegfried, M.R.; Fricker, H.A. Illuminating Active Subglacial Lake Processes with ICESat-2 Laser Altimetry. Geophys. Res. Lett. 2021, 48, e2020GL091089. [Google Scholar] [CrossRef]
- Neckel, N.; Franke, S.; Helm, V.; Drews, R.; Jansen, D. Evidence of cascading subglacial water flow at Jutulstraumen Glacier (Antarctica) derived from Sentinel-1 and ICESat-2 measurements. Geophys. Res. Lett. 2021, 48, e2021GL094472. [Google Scholar] [CrossRef]
- Lindzey, L.E.; Beem, L.H.; Young, D.A.; Quartini, E.; Blankenship, D.D.; Lee, C.K.; Lee, W.S.; Lee, J.I.; Lee, J. Aerogeophysical characterization of an active subglacial lake system in the David Glacier catchment, Antarctica. Cryosphere 2020, 14, 2217–2233. [Google Scholar] [CrossRef]
- Carter, S.P.; Blankenship, D.D.; Peters, M.E.; Young, D.A.; Holt, J.W.; Morse, D.L. Radar-based subglacial lake classification in Antarctica. Geochem. Geophys. Geosyst. 2007, 8, Q03016. [Google Scholar] [CrossRef]
- Siegert, M.J.; Priscu, J.C.; Alekhina, I.A.; Wadham, J.L.; Lyons, W.B. Antarctic subglacial lake exploration: First results and future plans. Philos. Trans. A Math Phys. Eng. Sci. 2016, 374, 20140466. [Google Scholar] [CrossRef]
- Yan, S.; Blankenship, D.D.; Greenbaum, J.S.; Young, D.A.; Li, L.; Rutishauser, A.; Guo, J.; Roberts, J.L.; van Ommen, T.D.; Siegert, M.J.; et al. A newly discovered subglacial lake in East Antarctica likely hosts a valuable sedimentary record of ice and climate change. Geology 2022, 50, 949–953. [Google Scholar] [CrossRef]
- Plewes, L.A.; Hubbard, B. A review of the use of radio-echo sounding in glaciology. Prog. Phys. Geogr. 2001, 25, 34. [Google Scholar] [CrossRef]
- Zirizzotti, A.; Cafarella, L.; Baskaradas, J.A.; Tabacco, I.E.; Urbini, S.; Mangialetti, M.; Bianchi, C. Dry–Wet Bedrock Interface Detection by Radio Echo Sounding Measurements. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2343–2348. [Google Scholar] [CrossRef]
- Popov, S.V.; Masolov, V.N. Forty-seven new subglacial lakes in the 0–110 E sector of East Antarctica. J. Glaciol. 2007, 53, 9. [Google Scholar] [CrossRef]
- Siegert, M.J. Antarctic subglacial lakes. Earth-Sci. Rev. 2000, 50, 22. [Google Scholar] [CrossRef]
- Carter, S.P.; Blankenship, D.D.; Young, D.A.; Holt, J.W. Using radar-sounding data to identify the distribution and sources of subglacial water application to Dome C, East Antarctica. J. Glaciol. 2009, 55, 16. [Google Scholar] [CrossRef]
- Zirizzotti, A.; Cafarella, L.; Urbini, S. Ice and Bedrock Characteristics Underneath Dome C (Antarctica) From Radio Echo Sounding Data Analysis. IEEE Trans. Geosci. Remote Sens. 2012, 50, 37–43. [Google Scholar] [CrossRef]
- Langley, K.; Kohler, J.; Matsuoka, K.; Sinisalo, A.; Scambos, T.; Neumann, T.; Muto, A.; Winther, J.G.; Albert, M. Recovery Lakes, East Antarctica: Radar assessment of sub-glacial water extent. Geophys. Res. Lett. 2011, 38, L05501. [Google Scholar] [CrossRef]
- Palmer, S.J.; Dowdeswell, J.A.; Christoffersen, P.; Young, D.A.; Blankenship, D.D.; Greenbaum, J.S.; Benham, T.; Bamber, J.; Siegert, M.J. Greenland subglacial lakes detected by radar. Geophys. Res. Lett. 2013, 40, 6154–6159. [Google Scholar] [CrossRef]
- Bowling, J.S.; Livingstone, S.J.; Sole, A.J.; Chu, W. Distribution and dynamics of Greenland subglacial lakes. Nat. Commun. 2019, 10, 2810. [Google Scholar] [CrossRef]
- Wolovick, M.J.; Bell, R.E.; Creyts, T.T.; Frearson, N. Identification and control of subglacial water networks under Dome A, Antarctica. J. Geophys. Res. Earth Surf. 2013, 118, 1–15. [Google Scholar] [CrossRef]
- Creyts, T.T.; Ferraccioli, F.; Bell, R.E.; Wolovick, M.; Corr, H.; Rose, K.C.; Frearson, N.; Damaske, D.; Jordan, T.; Braaten, D.; et al. Freezing of ridges and water networks preserves the Gamburtsev Subglacial Mountains for millions of years. Geophys. Res. Lett. 2014, 41, 8114–8122. [Google Scholar] [CrossRef]
- Young, D.A.; Schroeder, D.M.; Blankenship, D.D.; Kempf, S.D.; Quartini, E. The distribution of basal water between Antarctic subglacial lakes from radar sounding. Philos. Trans. A Math Phys. Eng. Sci. 2016, 374, 20140297. [Google Scholar] [CrossRef]
- Schroeder, D.M.; Blankenship, D.D.; Raney, R.K.; Grima, C. Estimating Subglacial Water Geometry Using Radar Bed Echo Specularity: Application to Thwaites Glacier, West Antarctica. IEEE Geosci. Remote Sens. Lett. 2015, 12, 443–447. [Google Scholar] [CrossRef]
- Dowdeswell, J.A.; Siegert, J.S. The physiography of modern Antarctic subglacial lakes. Glob. Planet. Chang. 2002, 35, 221–236. [Google Scholar] [CrossRef]
- Cooper, M.A.; Jordan, T.M.; Schroeder, D.M.; Siegert, M.J.; Williams, C.N.; Bamber, J.L. Subglacial roughness of the Greenland Ice Sheet: Relationship with contemporary ice velocity and geology. Cryosphere 2019, 13, 3093–3115. [Google Scholar] [CrossRef]
- Lang, S.; Xu, B.; Cui, X.; Luo, K.; Guo, J.; Tang, X.; Cai, Y.; Sun, B.; Siegert, M.J. A self-adaptive two-parameter method for characterizing roughness of multi-scale subglacial topography. J. Glaciol. 2021, 67, 560–568. [Google Scholar] [CrossRef]
- Oswald, G.K.A.; Gogineni, S.P. Recovery of subglacial water extent from Greenland radar survey data. J. Glaciol. 2008, 54, 94–106. [Google Scholar] [CrossRef]
- Jordan, T.M.; Cooper, M.A.; Schroeder, D.M.; Williams, C.N.; Paden, J.D.; Siegert, M.J.; Bamber, J.L. Self-affine subglacial roughness: Consequences for radar scattering and basal water discrimination in northern Greenland. Cryosphere 2017, 11, 1247–1264. [Google Scholar] [CrossRef]
- Ilisei, A.M.; Khodadadzadeh, M.; Ferro, A.; Bruzzone, L. An Automatic Method for Subglacial Lake Detection in Ice Sheet Radar Sounder Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3252–3270. [Google Scholar] [CrossRef]
- Qian, S.; Chen, D. Joint time-frequency analysis. IEEE Signal Process. Mag. 1999, 16, 52–67. [Google Scholar] [CrossRef]
- Shreve, R.L. Movement of Water in Glaciers. J. Glaciol. 1972, 11, 205–214. [Google Scholar] [CrossRef]
- Hamran, S.E.; Erlingsson, B.; Gjessing, Y.; Mo, P. Estimate of the subglacier dielectric constant of an ice shelf using a ground-penetrating step-frequency radar. IEEE Trans. Geosci. Remote Sens. 1998, 36, 8. [Google Scholar] [CrossRef]
- Fung, A.; Chen, K. Microwave Scattering and Emission Models for Users (Artech House Remote Sensing); Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Bell, R.E.; Ferraccioli, F.; Creyts, T.T.; Braaten, D.; Corr, H.; Das, I.; Damaske, D.; Frearson, N.; Jordan, T.; Rose, K.; et al. Widespread persistent thickening of the East Antarctic ice sheet by freezing from the base. Science 2011, 331, 1592–1595. [Google Scholar] [CrossRef] [PubMed]
- Ferraccioli, F.; Finn, C.A.; Jordan, T.A.; Bell, R.E.; Anderson, L.M.; Damaske, D. East Antarctic rifting triggers uplift of the Gamburtsev Mountains. Nature 2011, 479, 388–392. [Google Scholar] [CrossRef] [PubMed]
- CReSIS. 2009_Antarctica_TO_Gambit Data, Lawrence, KS, USA. Digital Media. 2021. Available online: http://data.cresis.ku.edu/ (accessed on 28 November 2022).
- Lohoefener, A. Design and Development of a Multi-Channel Radar Depth Sounder; University of Kansas: Lawrence, KS, USA, 2006. [Google Scholar]
- Morlighem, M.; Rignot, E.; Binder, T.; Blankenship, D.; Drews, R.; Eagles, G.; Eisen, O.; Ferraccioli, F.; Forsberg, R.; Fretwell, P.; et al. Deep glacial troughs and stabilizing ridges unveiled beneath the margins of the Antarctic ice sheet. Nat. Geosci. 2020, 13, 132–137. [Google Scholar] [CrossRef]
- Griffin, D.W.; Lim, J.S. Signal estimation from modified short-time Fourier transform. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 236–243. [Google Scholar] [CrossRef]
- Case, W.B. Wigner functions and Weyl transforms for pedestrians. Am. J. Phys. 2008, 76, 10. [Google Scholar] [CrossRef]
- Wang, B.; Sun, B.; Wang, J.; Greenbaum, J.; Guo, J.; Lindzey, L.; Cui, X.; Young, D.A.; Blankenship, D.D.; Siegert, M.J. Removal of ‘strip noise’ in radio-echo sounding data using combined wavelet and 2-D DFT filtering. Ann. Glaciol. 2020, 61, 124–134. [Google Scholar] [CrossRef]
- Samani, S.; Vadiati, M.; Delkash, M.; Bonakdari, H. A hybrid wavelet–machine learning model for qanat water flow prediction. Acta Geophys. 2022, 1–19. [Google Scholar] [CrossRef]
- Xue, W.; Zhu, J.C.; Rong, X.; Huang, Y.J.; Yang, Y.; Yu, Y.Y. The analysis of ground penetrating radar signal based on generalized S transform with parameters optimization. J. Appl. Geophys. 2017, 140, 75–83. [Google Scholar] [CrossRef]
- Wang, X.; Li, C.; Chen, W. Seismic Thin Interbeds Analysis Based on High-Order Synchrosqueezing Transform. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- He, W.; Hao, T.; Ke, H.; Zheng, W.; and Lin, K. Joint time-frequency analysis of ground penetrating radar data based on variational mode decomposition. J. Appl. Geophys. 2020, 181, 104146. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Hao, T.; Chang, Y.; Zhao, Y.H. Time-frequency analysis of enhanced GPR detection of RF tagged buried plastic pipes. NDT E Int. 2017, 92, 88–96. [Google Scholar] [CrossRef]
- Willis, I.C.; Pope, E.L.; Leysinger Vieli, J.M.C. Drainage networks, lakes and water fluxes beneath the Antarctic ice sheet. Ann. Glaciol. 2016, 57, 96–108. [Google Scholar] [CrossRef]
- Popov, S.V.; Chernoglazov, Y.B. Vostok Subglacial Lake, East Antarctica: Lake shoreline and subglacial water caves. Ice Snow 2011, 1, 12–24. (In Russian) [Google Scholar]
- Li, J.; Paden, J.; Leuschen, C.; Rodriguez-Morales, F.; Hale, R.D.; Arnold, E.J.; Crowe, R.; Gomez-Garcia, D.; Gogineni, P. High-Altitude Radar Measurements of Ice Thickness Over the Antarctic and Greenland Ice Sheets as a Part of Operation IceBridge. IEEE Trans. Geosci. Remote Sens. 2013, 51, 742–754. [Google Scholar] [CrossRef]
- Björnsson, H. Jökulhlaups in Iceland: Prediction, characteristics and simulation. Ann. Glaciol. 1992, 16, 95–106. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Campaign | AGAP |
|---|---|
| Radar type | MCRDS |
| Number of B-scope radargrams | 882 |
| Number of valid A-scopes | 1,515,065 |
| Platform type | Twin Otter aircraft |
| Platform height above ice sheet surface | Varied, hundreds of meters |
| Central frequency | 150 MHz |
| Wavelength in ice | ~1.12 m |
| Pulse duration | 3 μs (low gain), 10 μs (high gain) |
| Bandwidth | 10 MHz |
| Range resolution in ice (pulse compressed) | 8.4 m |
| Along-track resolution | 18 m, 30 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, T.; Jing, L.; Liu, J.; Wang, D.; Feng, T.; Zhao, A.; Li, R. Automatic Detection of Subglacial Water Bodies in the AGAP Region, East Antarctica, Based on Short-Time Fourier Transform. Remote Sens. 2023, 15, 363. https://doi.org/10.3390/rs15020363
Hao T, Jing L, Liu J, Wang D, Feng T, Zhao A, Li R. Automatic Detection of Subglacial Water Bodies in the AGAP Region, East Antarctica, Based on Short-Time Fourier Transform. Remote Sensing. 2023; 15(2):363. https://doi.org/10.3390/rs15020363
Chicago/Turabian StyleHao, Tong, Liwen Jing, Jiashu Liu, Dailiang Wang, Tiantian Feng, Aiguo Zhao, and Rongxing Li. 2023. "Automatic Detection of Subglacial Water Bodies in the AGAP Region, East Antarctica, Based on Short-Time Fourier Transform" Remote Sensing 15, no. 2: 363. https://doi.org/10.3390/rs15020363
APA StyleHao, T., Jing, L., Liu, J., Wang, D., Feng, T., Zhao, A., & Li, R. (2023). Automatic Detection of Subglacial Water Bodies in the AGAP Region, East Antarctica, Based on Short-Time Fourier Transform. Remote Sensing, 15(2), 363. https://doi.org/10.3390/rs15020363