

Deformation Detection of Mining Tunnel Based on Automatic Target Recognition

Abstract
1. Introduction
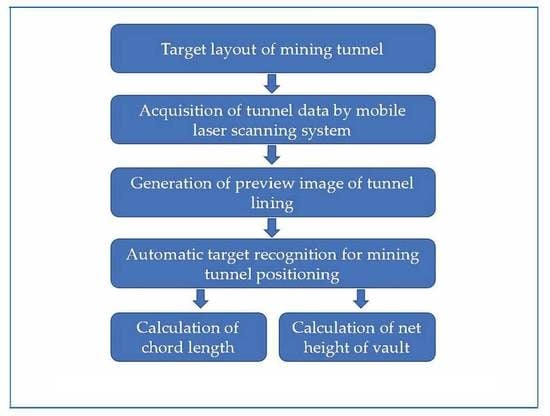
2. Methods
2.1. Data Acquisition Scheme Design
2.1.1. Mobile Tunnel Laser Detection System
2.1.2. Target Layout Scheme
2.2. Target Identification
2.2.1. Preview Image Generation
- (1)
- Build the index and pixel matrix
- (2)
- Generate image
2.2.2. Target Automatic Recognition
- (1)
- Dataset preparation and model training
- (2)
- Model evaluation
- (3)
- Optimization of identification accuracy
- Confidence
- b.
- Target space position
- c.
- Target gray scale rule
2.3. Parameter Calculation
2.3.1. Chord Length Calculation
2.3.2. Calculation of Vault Net Height of Arch Crown
2.4. Model Encapsulation and Application
3. Results
3.1. Comparison of Chord Length Accuracy of Roundtrip Measurement
3.2. Comparison of Vault Net Height Accuracy of Roundtrip Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Data statistics and analysis of urban rail transit in the first half of 2022. Mod. Urban Transit. 2022, 7, 116.
- Liao, H.S.; Li, Y.Z. Application of Automatic Deformation Monitoring Systemon Operational Metro Tunnel Monitoring. Geomat. Spat. Inf. Technol. 2021, 44, 193–195+198. [Google Scholar]
- Yang, S.Q. Research on rapid measurement method of long distance subway tunnel boundary. Geotech. Investig. Surv. 2022, 50, 57–61. [Google Scholar]
- Xu, Z.W.; Yao, L.B.; Sun, L.Y. Reliability and Accuracy Test Report on Trimble S8 Total Station′s Tunnel Profile Scan. Urban Geotech. Investig. Surv. 2008, 4, 118–122. [Google Scholar]
- Kontogianni, V.; Tzortzis, A.; Stiros, S. Deformation and failure of the Tymfristos tunnel, Greece. J. Geotech. Geoenviron. Eng. 2004, 130, 1004–1013. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, X. The Application of Laser Profiler in the Detection of Tunnel Section. Transp. Sci. Technol. 2014, 5, 94–96. [Google Scholar]
- Wu, H.; Jia, B.; Wang, Y. Application of laser cross-section instrument in modern tunnel works. Shanxi Archit. 2007, 31, 331–332. [Google Scholar]
- Pen, F. The application of the laser profiler on the first lining quality inspection of channel. Shanxi Archit. 2010, 36, 333–334. [Google Scholar]
- Cao, X.G.; Yang, J.L.; Liu, Y.; Hai-Yan, S.I.; Meng, X.L.; Zhang, W.C. Subway Tunnel Profile Measurement Based on Ground 3D Laser Scanning Data. Geomat. Spat. Inform. Technol. 2015, 38, 4–6. [Google Scholar]
- Tuo, L.; Kang, Z.Z.; Xie, Y.C.; Wang, B.Q. Continuously vertical section abstraction for deformation monitoring of subway tunnel based on terrestrial point clouds. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 171–175+185. [Google Scholar]
- Han, J.-Y.; Guo, J.; Jiang, Y.-S. Monitoring tunnel profile by means of multi-epoch dispersed 3-D LiDAR point clouds. Tunnell. Undergr. Space Technol. 2013, 33, 186–192. [Google Scholar] [CrossRef]
- Novaković, G.; Lazar, A.; Kovačič, S.; Vulić, M. The usability of terrestrial 3D laser scanning technology for tunnel clearance analysis application. Appl. Mech. Mater. 2014, 683, 219–224. [Google Scholar] [CrossRef]
- Cheng, Y.-J.; Qiu, W.; Lei, J. Automatic extraction of tunnel lining cross-sections from terrestrial laser scanning point clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef] [PubMed]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2017, 49, 99–116. [Google Scholar] [CrossRef]
- Han, S.; Cho, H.; Kim, S.; Jung, J.; Heo, J. Automated and efficient method for extraction of tunnel cross sections using terrestrial laser scanned data. J. Comput. Civil Eng. 2013, 27, 274–281. [Google Scholar] [CrossRef]
- Montero, R.; Victores, J.G.; Martínez, S.; Jardón, A.; Balaguer, C. Past, present and future of Robotic Tunnel Inspection. Automat. Constr. 2015, 59, 99–112. [Google Scholar] [CrossRef]
- Cui, H.; Ren, X.; Mao, Q.; Hu, Q.; Wang, W. Shield subway tunnel deformation detection based on mobile laser scanning. Automat. Constr. 2019, 106, 102889. [Google Scholar] [CrossRef]
- Cao, Z.; Chen, D.; Shi, Y.; Zhang, Z.; Jin, F.; Yun, T.; Xu, S.; Kang, Z.; Zhang, L. A flexible architecture for extracting Metro Tunnel Cross sections from Terrestrial Laser Scanning Point Clouds. Remote Sens. 2019, 11, 297. [Google Scholar] [CrossRef]
- Sun, H.; Liu, S.; Zhong, R.; Du, L. Cross-section deformation analysis and visualization of shield tunnel based on Mobile Tunnel Monitoring System. Sensors 2020, 20, 1006. [Google Scholar] [CrossRef]
- Sun, H.; Xu, Z.; Yao, L.; Zhong, R.; Du, L.; Wu, H. Tunnel monitoring and measuring system using mobile laser scanning: Design and deployment. Remote Sens. 2020, 12, 730. [Google Scholar] [CrossRef]
- GRP IMS5000 Tunnel Scanning System. 2022. Available online: http://www.brailtec.com/index/products.html?id=%2027 (accessed on 7 July 2022).
- TS3 Three Channels Scanner. 2022. Available online: https://www.spacetec.de/en/products/ts3/ (accessed on 7 July 2022).
- SiTrack One Mobile Track Scanning System. 2022. Available online: http://leica-gd.com/Products/Show_49.html (accessed on 7 July 2022).
- Track Moving 3D Laser Measurement System (rMMS). 2022. Available online: http://www.hirail.cn/product_detail/id/7.html (accessed on 7 July 2022).
- Liu, S.; Sun, H.; Zhang, Z.; Li, Y.; Zhong, R.; Li, J.; Chen, S. A multiscale deep feature for the instance segmentation of water leakages in tunnel using MLS point cloud intensity images. IEEE T. Geosci. Remote. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Du, L.M.; Zhong, R.F.; Sun, H.L.; Zhu, Q.; Zhang, Z. Tunnel cross section extraction and deformation analysis based on mobile laser scanning technology. Bull. Surv. Mapp. Suppl. 2018, 6, 61–67. [Google Scholar]
- Du, L.; Zhong, R.; Sun, H.; Pang, Y.; Mo, Y. Dislocation Detection of Shield Tunnel Based on Dense Cross-Sectional Point Clouds. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22227–22243. [Google Scholar] [CrossRef]
- Yang, H.; Xu, X. Structure monitoring and deformation analysis of tunnel structure. Compos. Struct. 2021, 276, 114565. [Google Scholar] [CrossRef]
- Yue, Z.; Sun, H.; Zhong, R.; Du, L. Method for tunnel displacements calculation based on Mobile Tunnel Monitoring System. Sensors 2021, 21, 4407. [Google Scholar] [CrossRef]
- Zhao, N.N.; Wu, W.; Wang, Y. Research on application of structural deformation monitoring of metro tunnel based on 3D laser scanning technology. China Mini. Mag. 2020, 29, 176–180. [Google Scholar]
- Ji, C.Q.; Sun, H.L.; Zhong, R.F.; Li, J.C.; Han, Y.L. Precise Positioning Method of Moving Laser Point Cloud in Shield Tunnel based on Bolt Hole Extraction. Remote Sens. 2022, 14, 4719. [Google Scholar] [CrossRef]
- Han, Y.; Sun, H.; Zhong, R. Three-dimensional linear restoration of a tunnel based on measured track and uncontrolled mobile laser scanning. Sensors 2021, 21, 3815. [Google Scholar] [CrossRef]
- Han, Y.; Sun, H.; Lu, Y.; Zhong, R.; Ji, C.; Xie, S. 3D Point Cloud Generation Based on Multi-Sensor Fusion. Appl. Sci. 2022, 12, 9433. [Google Scholar] [CrossRef]
- Yue, Z.; Sun, H.; Zhong, R.; Ma, H.; Xu, Z.; Elliott, F. Measurement of tunnel clearance convergence using mobile laser detection technology. Can. J. Remote Sens. 2021, 47, 100–118. [Google Scholar] [CrossRef]
- Alexey, B.; Wang, C.Y.; Mark Liao, H.Y. Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, J.G. Technical Code for Monitoring Underground Works of Shenzhen Urban Rail Transit; Shenzhen Metro Group Co., Ltd.: Shenzhen, China, 2010. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser System | |
|---|---|
| Beam divergence | <0.5 mrad |
| Range | 0.3–119 m |
| Range resolution | 0.1 mm |
| Rate of measurement of points | Maximum 1.016 million points per second |
| Linearity error | ≤1 mm |
| Transmitter unit | |
| Vertical viewing angle | 360° |
| Angular resolution | 0.0088° (40,960 pixel/360°) |
| Angle accuracy | 0.02° rms |
| Rotating speed | 50–200 Hz (Highest 12,000 rpm) |
| Max Batches | TP | FP | FN | Detection Count | Truth Count | P | R | F1 |
|---|---|---|---|---|---|---|---|---|
| 2000 | 507 | 45 | 0 | 552 | 507 | 0.92 | 1 | 0.96 |
| Tunnel Type | Serial No. | Forward (mm) | Backward (mm) | D-Value (mm) |
|---|---|---|---|---|
| Horseshoe tunnel | 1 | 5860.0 | 5860.0 | 0.0 |
| 2 | 5870.4 | 5871.2 | 0.8 | |
| 3 | 5867.0 | 5866.8 | 0.2 | |
| 4 | 5912.0 | 5911.8 | 0.2 | |
| 5 | 5924.6 | 5921.4 | 3.2 | |
| 6 | 5905.6 | 5906.4 | 0.8 | |
| 7 | 5914.0 | 5914.0 | 0.0 | |
| 8 | 5821.6 | 5820.4 | 1.2 | |
| 9 | 5894.8 | 5894.4 | 0.4 | |
| 10 | 5909.0 | 5907.0 | 2.0 | |
| 11 | 5931.3 | 5930.3 | 1.0 | |
| 12 | 5886.7 | 5885.4 | 1.3 | |
| 13 | 5851.2 | 5850.2 | 1.0 | |
| 14 | 5835.6 | 5833.1 | 2.5 | |
| 15 | 5890.3 | 5891.3 | 1.0 | |
| 16 | 5920.1 | 5919.1 | 1.0 | |
| 17 | 5911.2 | 5910.4 | 0.8 | |
| 18 | 5884.0 | 5884.0 | 0.0 | |
| 19 | 5859.0 | 5859.0 | 0.0 | |
| 20 | 5893.2 | 5894.0 | 0.8 | |
| 21 | 5885.6 | 5883.0 | 2.6 | |
| Average difference of horseshoe tunnel | 1.0 | |||
| Similar rectangular A tunnel | 22 | 5397.6 | 5394.2 | 3.4 |
| 23 | 5498.1 | 5499.1 | 1.0 | |
| 24 | 5484.0 | 5484.0 | 0.0 | |
| 25 | 5591.3 | 5589.3 | 2.0 | |
| 26 | 5554.1 | 5550.4 | 3.7 | |
| Average difference of similar rectangular A tunnel | 2.0 | |||
| Similar rectangular B tunnel | 27 | 5215.8 | 5213.8 | 2.0 |
| 28 | 5223.6 | 5221.0 | 2.6 | |
| 29 | 5197.2 | 5195.4 | 1.8 | |
| 30 | 5183.0 | 5183.0 | 0.0 | |
| 31 | 5179.4 | 5177.0 | 2.4 | |
| 32 | 5206.4 | 5203.4 | 3.0 | |
| 33 | 5182.0 | 5178.4 | 3.6 | |
| 34 | 5193.1 | 5190.3 | 2.8 | |
| 35 | 5175.2 | 5172.4 | 2.8 | |
| 36 | 5231.6 | 5228.4 | 3.2 | |
| Average difference of similar rectangular B tunnel | 2.4 | |||
| Straight-wall circular arch tunnel | 37 | 6599.8 | 6598.1 | 1.7 |
| 38 | 7998.4 | 7997.4 | 1.0 | |
| Average difference of straight-wall circular arch tunnel | 1.3 | |||
| Average difference | 1.7 | |||
| Tunnel Type | Serial No. | Forward (mm) | Backward (mm) | D-Value (mm) |
|---|---|---|---|---|
| Horseshoe tunnel | 1 | 5121.5 | 5122.4 | 0.9 |
| 2 | 5075.8 | 5076.9 | 1.1 | |
| 3 | 5098.7 | 5099.4 | 0.7 | |
| 4 | 5084.2 | 5083.5 | 0.7 | |
| 5 | 5075.8 | 5075.2 | 0.6 | |
| 7 | 5082.7 | 5081.2 | 1.5 | |
| 8 | 5065.5 | 5064.2 | 1.3 | |
| 9 | 5010.3 | 5011.4 | 1.1 | |
| 10 | 5080.4 | 5079.2 | 1.2 | |
| 11 | 5099.1 | 5097.3 | 1.8 | |
| 12 | 5113.5 | 5112.2 | 1.3 | |
| 13 | 5105.1 | 5104.4 | 0.7 | |
| 14 | 5102.5 | 5102.1 | 0.4 | |
| 30 | 5100.9 | 5099.7 | 1.2 | |
| 31 | 5084.6 | 5083.2 | 1.4 | |
| 32 | 5099.9 | 5100.1 | 0.2 | |
| 33 | 5094.0 | 5093.9 | 0.1 | |
| 34 | 5114.3 | 5114.1 | 0.2 | |
| 35 | 5172.6 | 5170.8 | 1.8 | |
| 36 | 5159.6 | 5159.0 | 0.6 | |
| 37 | 5193.8 | 5194.0 | 0.2 | |
| Average difference of horseshoe tunnel | 0.9 | |||
| Similar rectangular A tunnel | 15 | 6450.5 | 6452.0 | 1.5 |
| 16 | 6342.9 | 6340.0 | 2.9 | |
| 17 | 6604.1 | 6607.6 | 3.5 | |
| 28 | 6833.0 | 6830.3 | 2.7 | |
| 29 | 6914.7 | 6916.8 | 2.1 | |
| Average difference of similar rectangular A tunnel | 2.5 | |||
| Similar rectangular B tunnel | 18 | 5657.6 | 5654.8 | 2.8 |
| 19 | 5627.2 | 5624.5 | 2.7 | |
| 20 | 5629.1 | 5628.6 | 0.5 | |
| 21 | 5616.4 | 5616.9 | 0.5 | |
| 22 | 5595.0 | 5593.3 | 1.7 | |
| 23 | 5624.8 | 5624.7 | 0.1 | |
| 24 | 5561.6 | 5560.9 | 0.7 | |
| 25 | 5562.8 | 5561.2 | 1.6 | |
| 26 | 5580.8 | 5577.6 | 3.2 | |
| 27 | 5551.4 | 5551.2 | 0.2 | |
| Average difference of similar rectangular B tunnel | 1.4 | |||
| Straight-wall circular arch tunnel | 6 | 5269.8 | 5268.0 | 1.8 |
| 38 | 5412.6 | 5412.3 | 0.3 | |
| Average difference of straight-wall circular arch tunnel | 1.0 | |||
| Average difference | 1.4 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, C.; Sun, H.; Zhong, R.; Sun, M.; Li, J.; Lu, Y. Deformation Detection of Mining Tunnel Based on Automatic Target Recognition. Remote Sens. 2023, 15, 307. https://doi.org/10.3390/rs15020307
Ji C, Sun H, Zhong R, Sun M, Li J, Lu Y. Deformation Detection of Mining Tunnel Based on Automatic Target Recognition. Remote Sensing. 2023; 15(2):307. https://doi.org/10.3390/rs15020307
Chicago/Turabian StyleJi, Changqi, Haili Sun, Ruofei Zhong, Mingze Sun, Jincheng Li, and Yue Lu. 2023. "Deformation Detection of Mining Tunnel Based on Automatic Target Recognition" Remote Sensing 15, no. 2: 307. https://doi.org/10.3390/rs15020307
APA StyleJi, C., Sun, H., Zhong, R., Sun, M., Li, J., & Lu, Y. (2023). Deformation Detection of Mining Tunnel Based on Automatic Target Recognition. Remote Sensing, 15(2), 307. https://doi.org/10.3390/rs15020307