
Investigating the Quality of UAV-Based Images for the Thermographic Analysis of Buildings



Abstract
1. Introduction
2. Materials and Methods
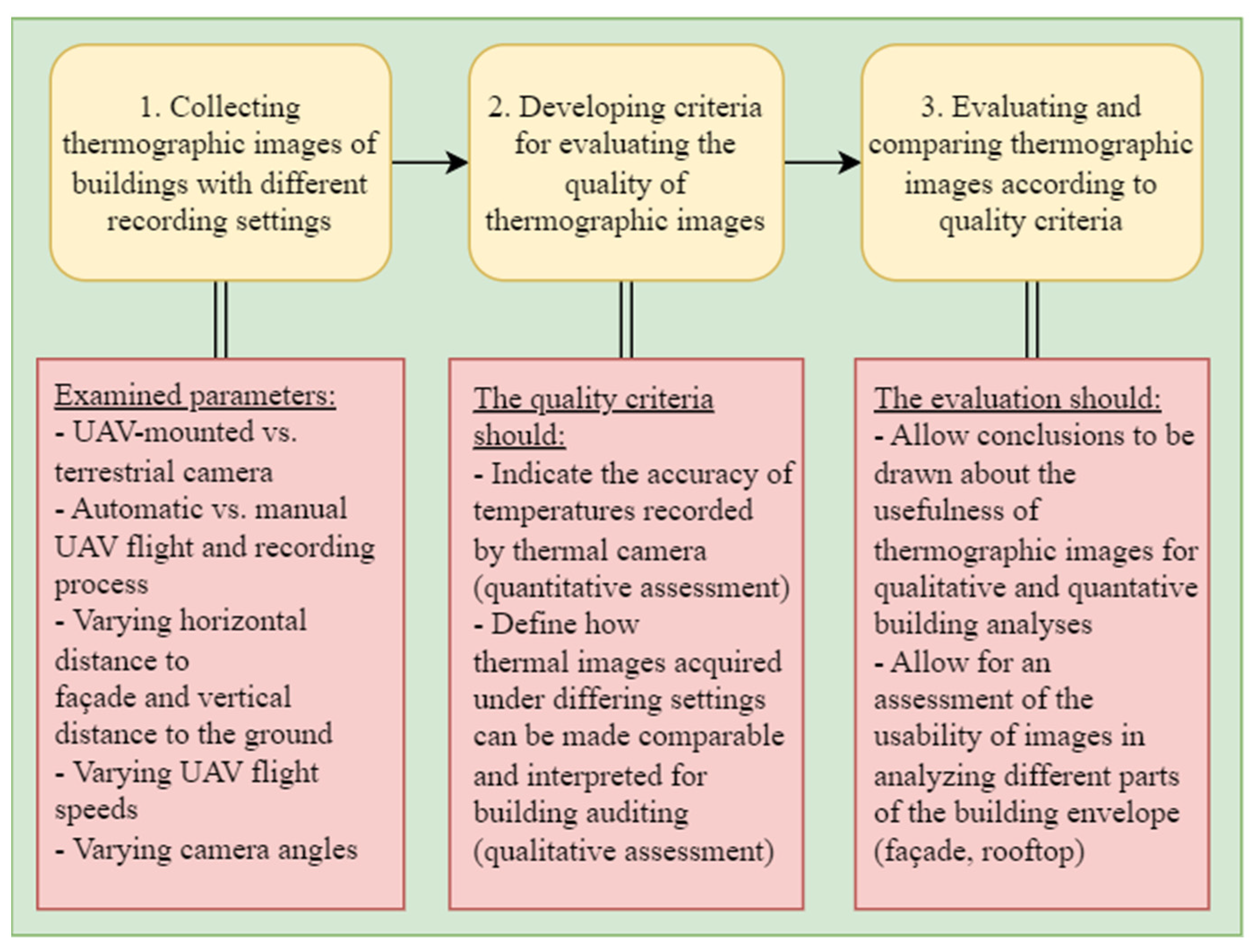
2.1. Research Approach
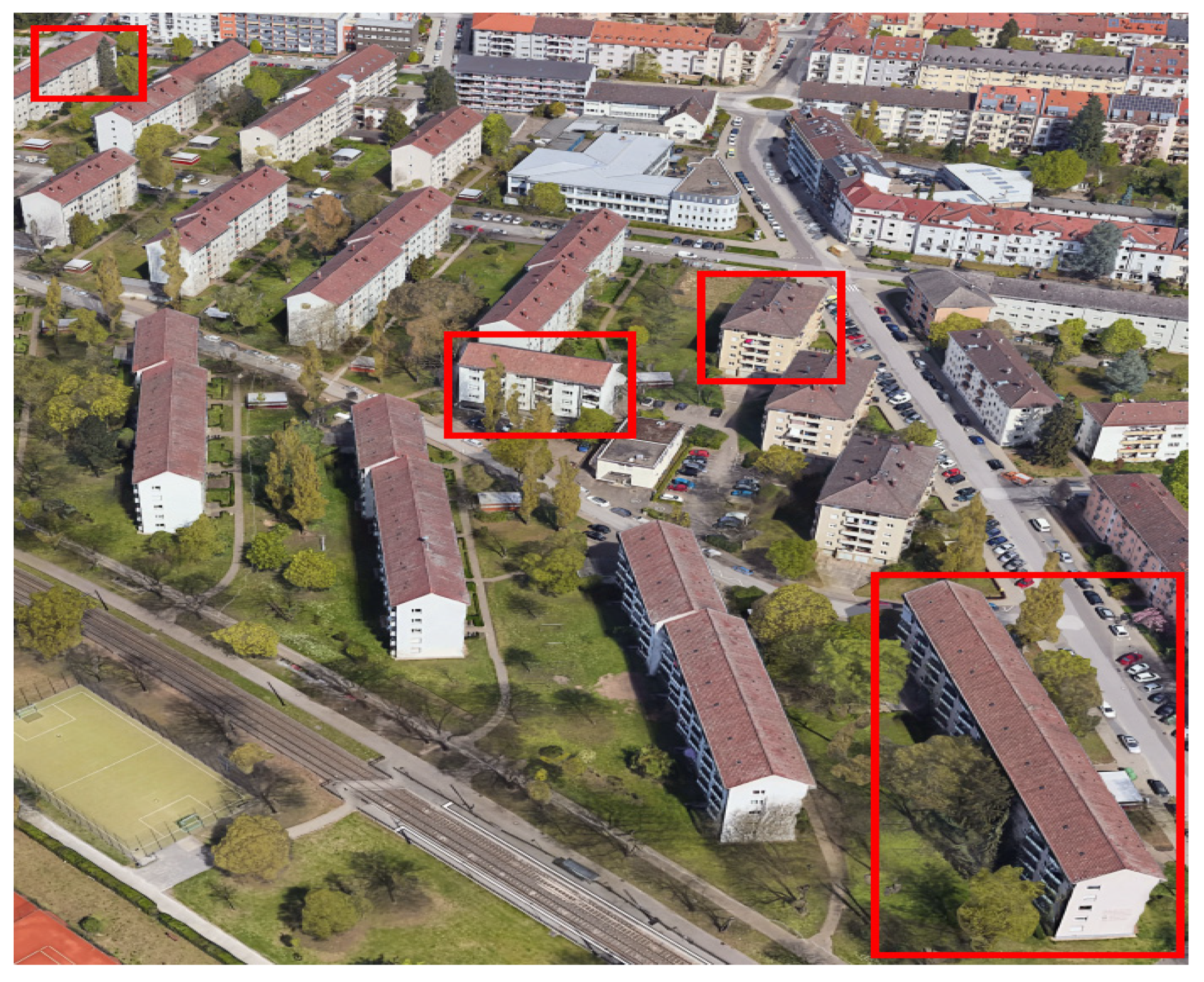
2.2. Data Collection
2.3. Evaluation Criteria
- -
- Motion blur: Motion blur occurs when a camera moves during the image recording process, resulting in stripe-like, blurred areas [35]. Camera speed, shutter speed and distance to the captured scene all influence how the effect manifests itself [35]. Camera speed and distance correlate in their influence on motion blur, particularly in UAV-based applications: The same amount of blur can be caused by a slower, close-up movement as well as a faster flight at greater distance [36]. Motion blur affects the detectability of thermally relevant areas and can falsify temperatures shown on thermographic images [35].
- -
- Feature discernibility: The precise identification of thermal anomalies as part of the thermographic building auditing process vastly depends on the level of detail discernible within the recorded images. This aspect can be described on a qualitative level using the term spatial resolution: A common concept in remote sensing, it eludes to “the smallest object [or imaged ground area] that can be resolved by [a] sensor” [37]. Finer or greater spatial resolution means a higher level of detail is displayed in comparison to coarse or low resolution [38]. The size of recordable detail in a given scene depends on the instantaneous field of view (the camera-dependent angle through which radiation can be received) and the variable distance between camera and object of scrutiny [38]. The camera angle plays an influential role as well since the absolute distance to an object increases as soon as the optical axis is not perpendicular to its surface. Although such a change in perspective increases the capturable building surface area, it comes at the cost of lower resolution of the details being portrayed.
- -
- Accessibility (of an area under scrutiny): While the previous factors describe the influences on the visibility of thermal anomalies in building auditing, this third criterion lays emphasis on what areas are even accessible to the various image acquisition methods. This depends on the camera pose and angle in relation to the inspected object as well as surface features and form. If the camera’s optical axis is almost parallel to the building surface, the identification of thermal bridges will be nearly impossible. Similarly, a building part might simply be inaccessible due to positional constraints or surface elements blocking the camera’s view. This aspect is particularly relevant when the acquisition’s aim lies in assessing the entire envelope of a given structure.
- -
- Comparative temperature difference: As the name suggests, the comparative temperature difference means to indicate variations in recorded thermal values across different settings and acquisition methods. Quantifying this value allows the thermal images to be evaluated with regards to their usability in calculating U-values or energy losses [22]. The difference is defined as the delta in temperature of a certain area of interest across two comparable thermographic images:where corresponds to the maximum temperature of an area of interest (a thermal anomaly) recorded at a distance of up to 15 m (terrestrial and manual UAV), 22 m or 42 m (automatic UAV) to the building. The camera angle is defined as either t (terrestrial), o (oblique/45°), n (nadir/90°) or m (manual/0°). is the maximum temperature of the same area of interest within a second thermal image taken at a distance of up to 15 m (terrestrial and manual UAV), 22 m or 42 m (automatic UAV) to the building and the camera angle —again defined as either t, o, n or m. Changes in distance to the target object may lead to distortions in temperatures recorded by a thermal camera owing to intermediate air particles absorbing parts of the emitted infrared radiation [27]. Such atmospheric influences will likely have a noticeable effect as—according to Fouad and Richter [27]—the resulting temperature distortion remains neglectable only at distances of up to 20 m. In addition, the viewing angle or can further influence the calculated thermal difference. Emissivity decreases significantly at angles of more than 45°, thus causing larger temperature differences [39]. Quantifying the comparative temperature difference is important because it allows information to be derived about the ways in which thermographic UAV imagery can be used, e.g., in calculating U-values or energy losses [22].
- -
- Comparative contrast: Contrast indicates differences in brightness and color within an image [40]. According to Ortiz-Sanz et al. [39] and Filippeschi and Leccese [41], this factor is mainly influenced by camera distance and angle to the object under scrutiny. A decrease in quantitative thermal contrast can be caused by signal degradation and increased reflections associated with lower emissivity levels [27,29]. For its use in thermal building auditing, contrast in an individual image can be defined as the temperature difference between a thermal anomaly (area of interest) and its surroundings (reference area). We, therefore, specify the comparative quantitative contrast as the difference in contrast of a specific area of interest between two thermographic images as follows:where and correspond to the quantitative contrasts of a thermal anomaly found in images recorded with different settings i, k and j, l (see comparative temperature difference). The contrast values themselves are defined as:and thereby describe the temperatures of an area of interest , while and represent the values measured at an adjacent reference area . The reference area is chosen as the nearest point to an area of increased temperature that is thermally monotonous, in other words constitutes an unaffected part of the building. The distances and between camera and building vary between up to 15 m for terrestrial and manually piloted UAV, as well as 22 m or 42 m for automatic UAV-based recordings. The camera angles and can once more be defined as either t, o, n or m.
2.4. Evaluation Procedure
3. Results
- -
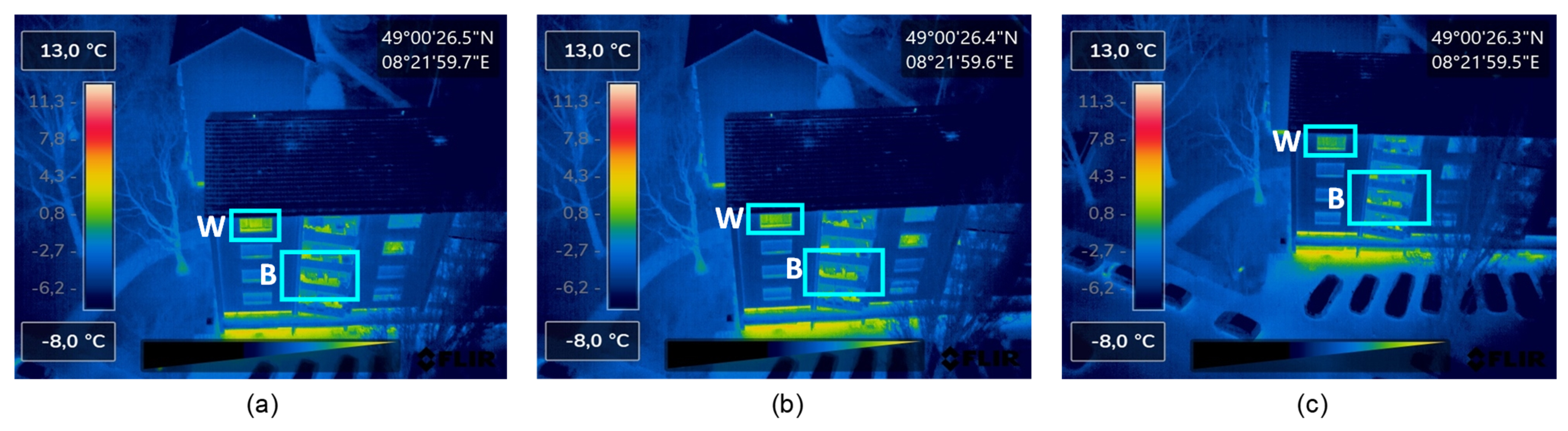
- Motion blur: Motion blur stems from movements of either the camera or objects in the field of view, making this criterion solely relevant to dynamic acquisition modes, seeing as the objects under scrutiny—namely buildings—are immobile. Acquisition via hand-held terrestrial camera or UAV in manual mode is considered static and therefore unaffected. In contrast, automatic UAV flight mode can be susceptible to motion blur. An evaluation of the case study images, however, shows that flight speeds of up to 5 m/s do not cause any visible blurring in all analyzed images. Figure 5 illustrates the absence of blurring effects in three exemplary images of the dataset.
- -
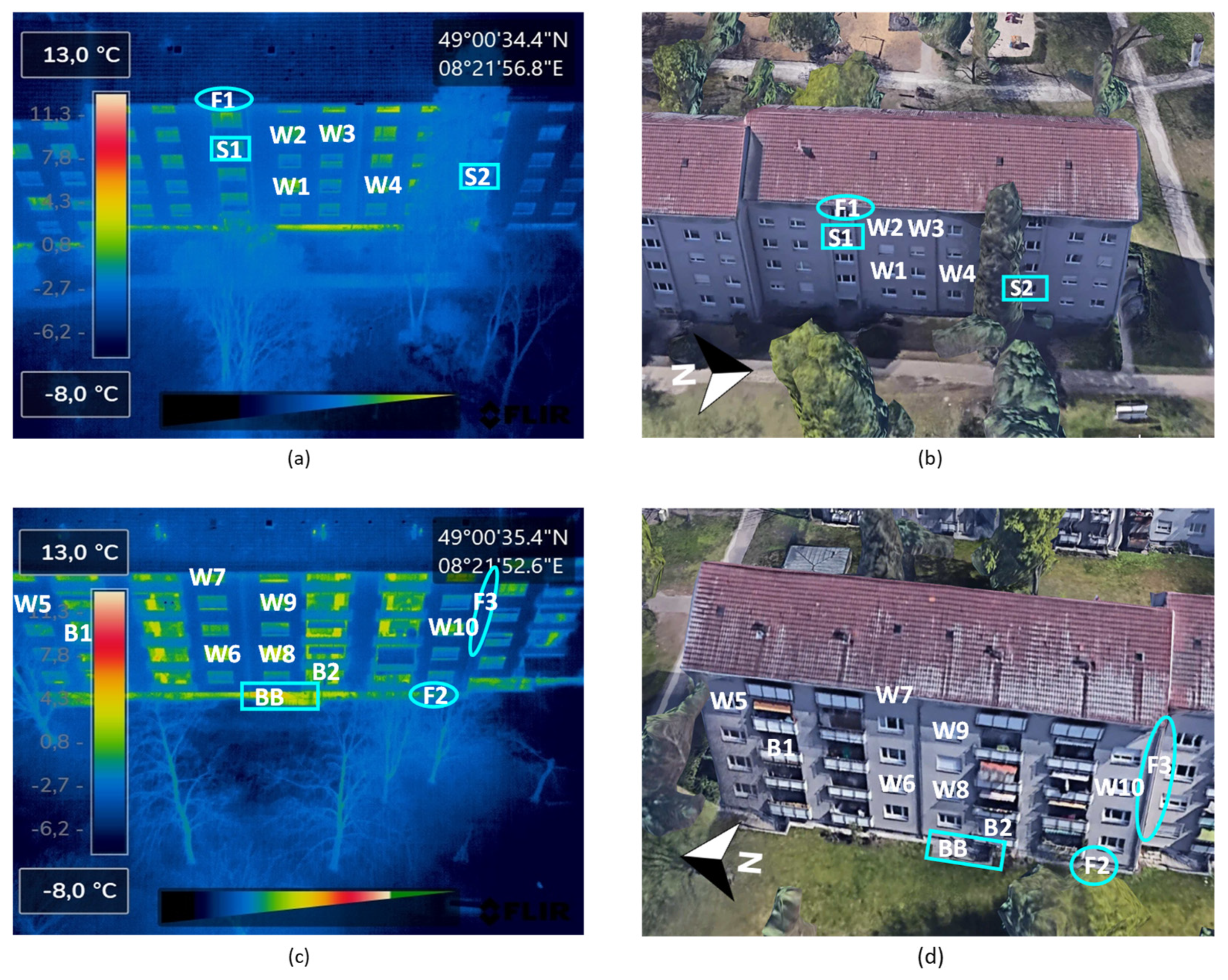
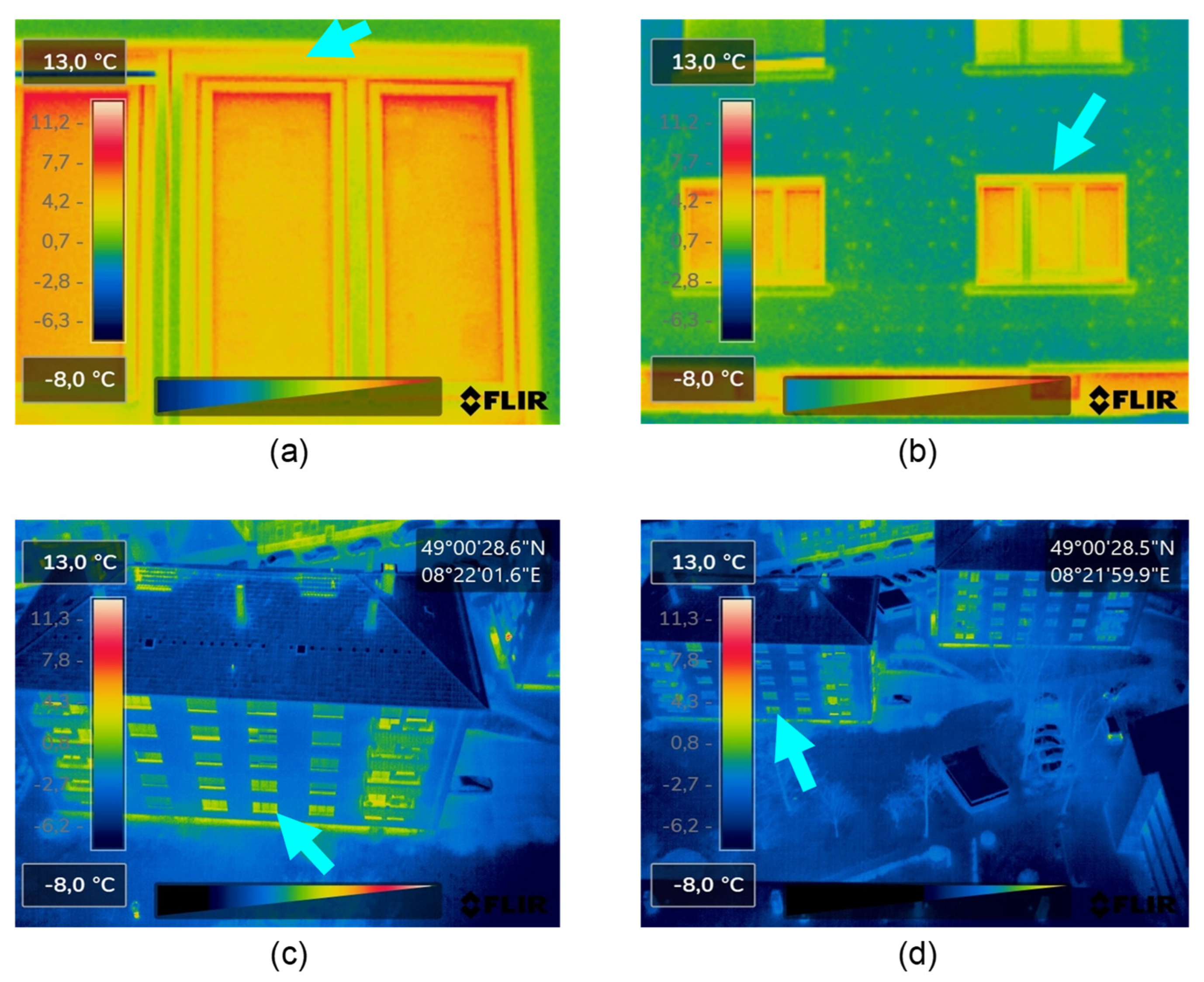
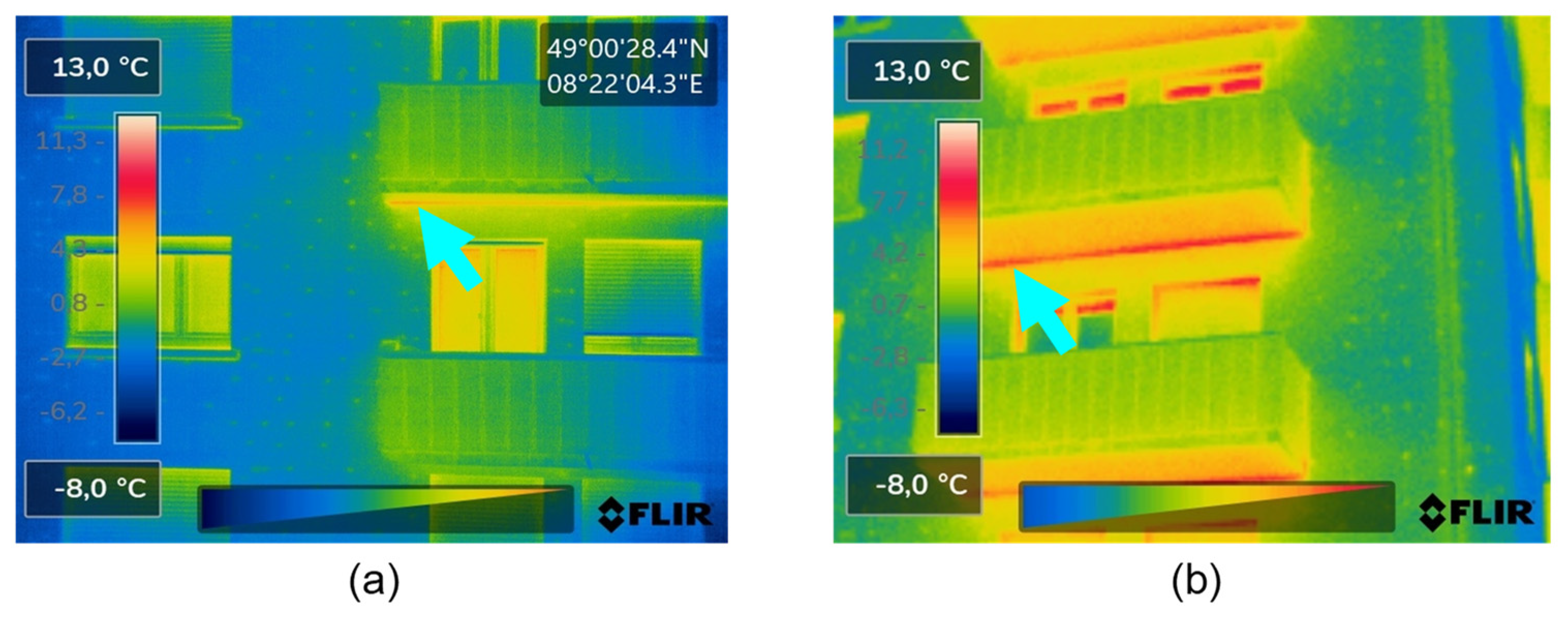
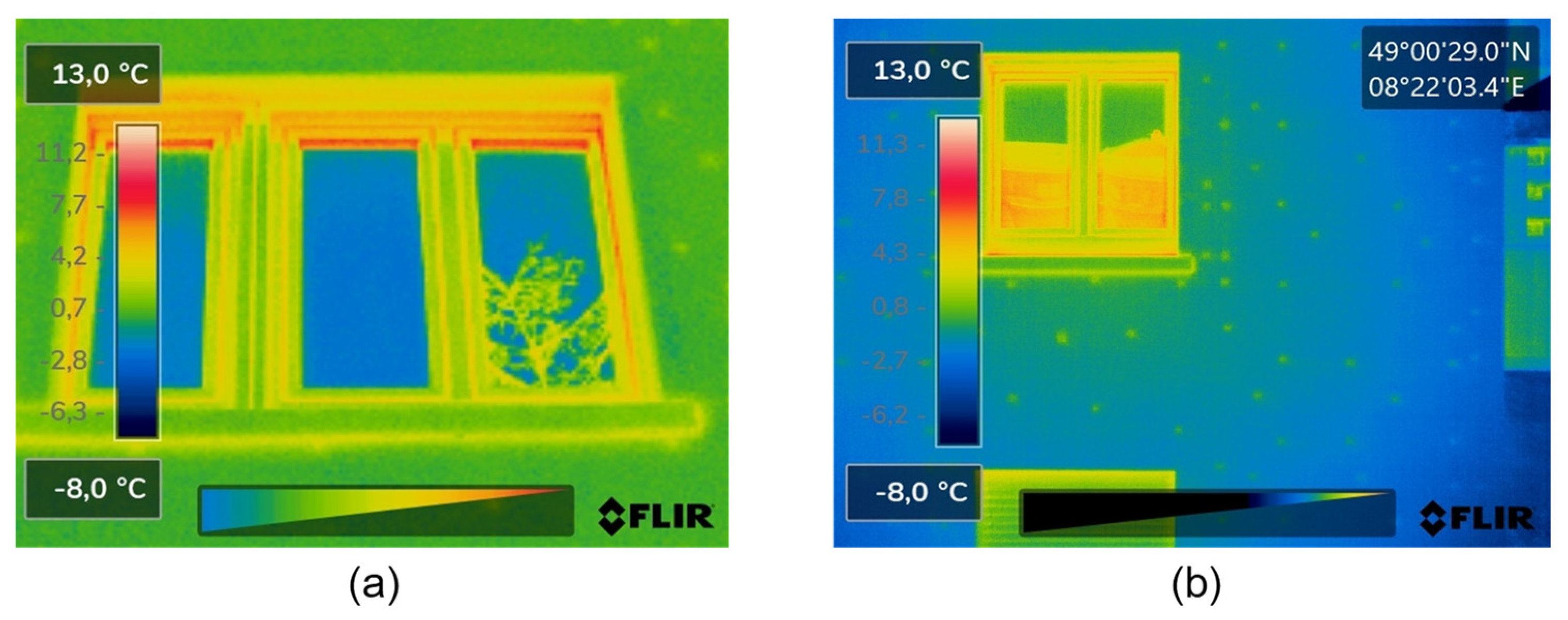
- Feature discernibility: The distance between camera and target object, the angle and intrinsic camera-related properties all significantly influence resolution and the visibility of image details. This impact varies based on the mode of acquisition and implemented settings. UAV-based thermal images, recorded at a height of 22 m to 42 m above a building at a 45° camera angle, display discernible outlines of basement exits, base areas, windows, balconies and doors. However, a visibly greater accuracy can be achieved at a 22 m distance in comparison to 42 m with regards to details on windows and balconies. Thermal anomalies on window frames, sills and balconies, while clear at a closer range, are indistinguishable in images recorded at a distance of 42 m. Figure 6 exemplifies this observation by depicting the same building window captured through various methods and settings. As the same figure also demonstrates, such building elements can be seen in even greater detail in manually recorded images and terrestrial images owing to the smaller distances of 4 m to 15 m. On a ground-level altitude, hand-held cameras can capture images of comparable detail to a manual UAV-based camera at the same distance to the building. However, while manually piloted UAVs can cover upper areas of a building envelope with the same constant spatial resolution, the terrestrial acquisition mode requires changes in angle, thus causing a loss of discernible details. Nevertheless, a comparative analysis of the case study images shows that the terrestrial hand-held camera-based method records the following areas in greatest detail: geometric thermal bridges on balcony slabs, walls, between the building base and its façade, small windows close to ground level, window frame structures, air leakages between door and frame as well as window and sill and accumulated heat in upper window parts.
- -
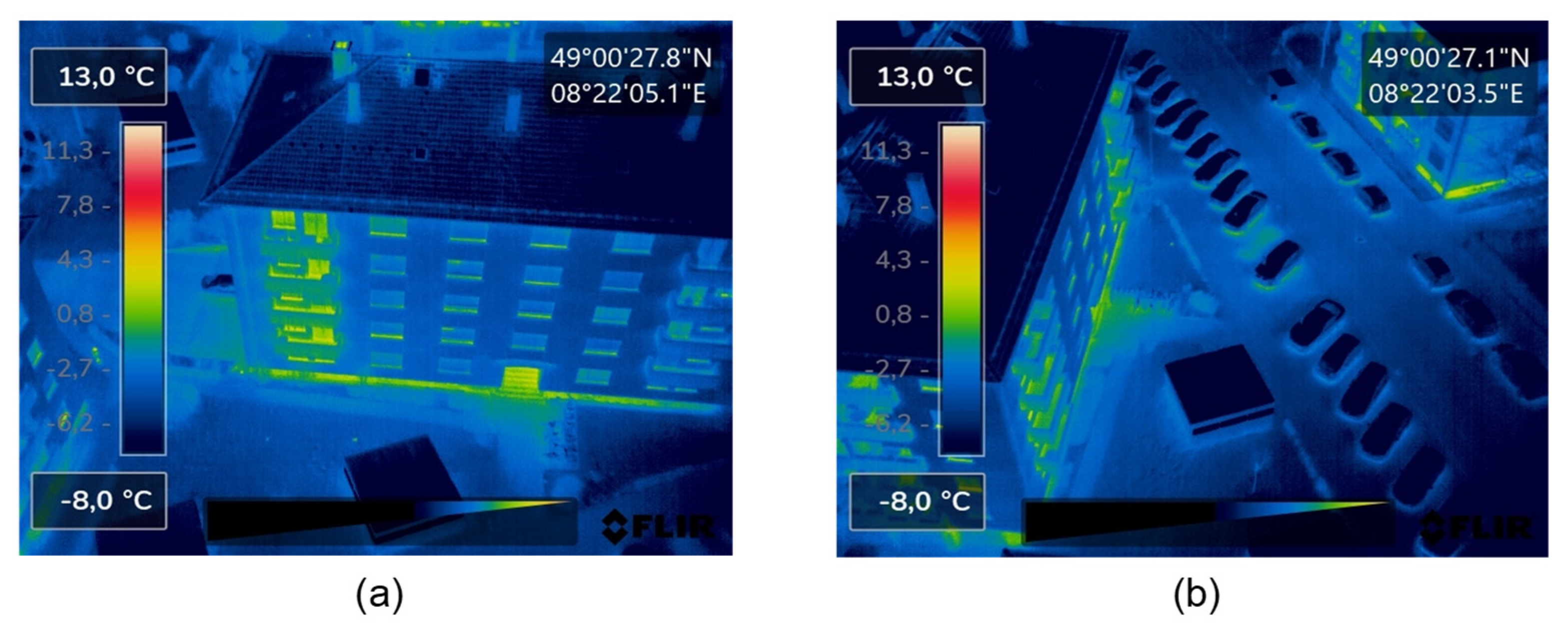
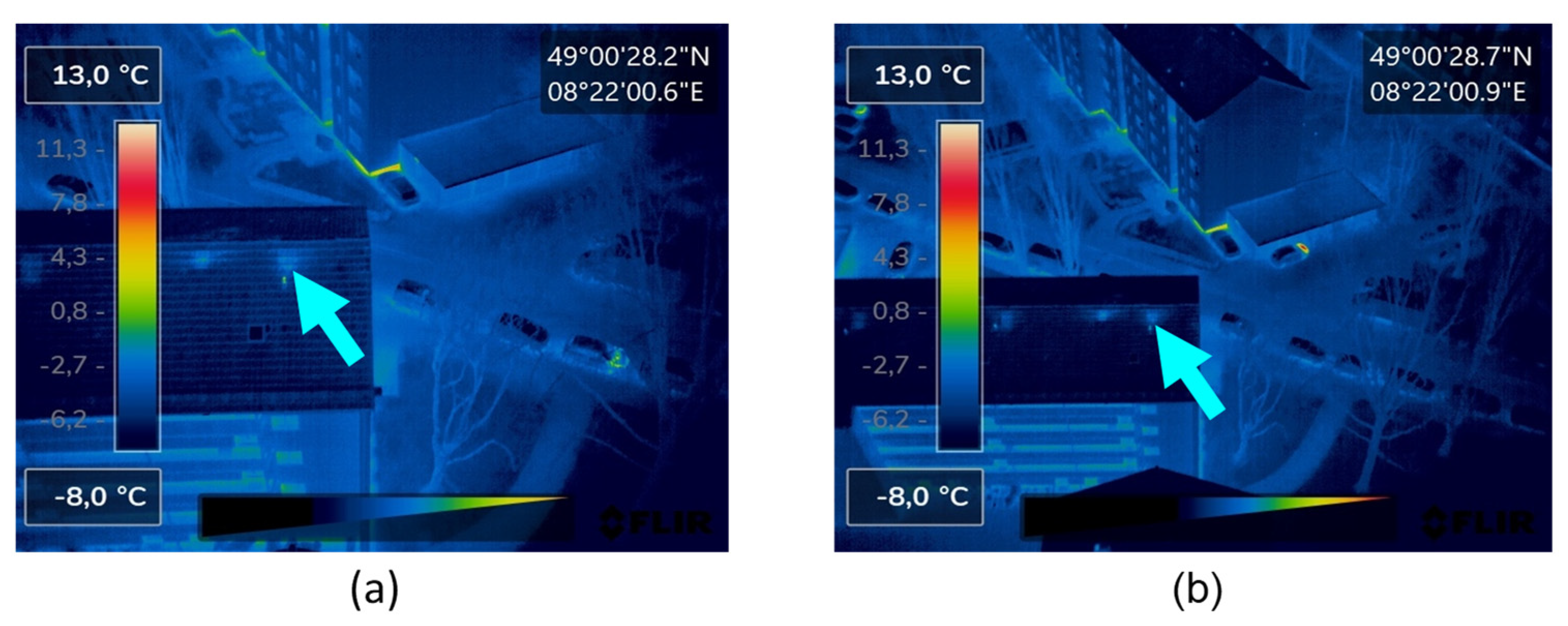
- Accessibility: The areas of a building’s envelope that can be captured by thermal camera depend on the acquisition method and the achievable position-based field of view. The nadir perspective, while allowing for a detailed view of rooftops, is ineffective at recording a building’s façade, owing to the perpendicular angle between optical axis and normal on such a wall. In contrast, UAV-based images acquired automatically with a 45° pitch camera angle do show these kinds of details. In theory, this method allows for almost (Excepting minor blind spots such as those caused by building elements (like balconies) obscuring small façade parts from view) the entire building envelope to be screened. It must be noted, however, that the choice of flight pattern also plays an important role in how well the various building façades can be captured. As depicted in Figure 7a, a heading angle perpendicular to a wall will allow for the above described to be achieved with regards to this particular façade. However, assuming a rectangular building shape, the same angle will allow near to no clear view or access to both neighboring walls (s. Figure 7b). Flying solely with a strip pattern at such a heading angle needs to be cautioned against. Choosing a crosshatch pattern instead will ensure all four building façades are recorded with the same level of detail.
- -
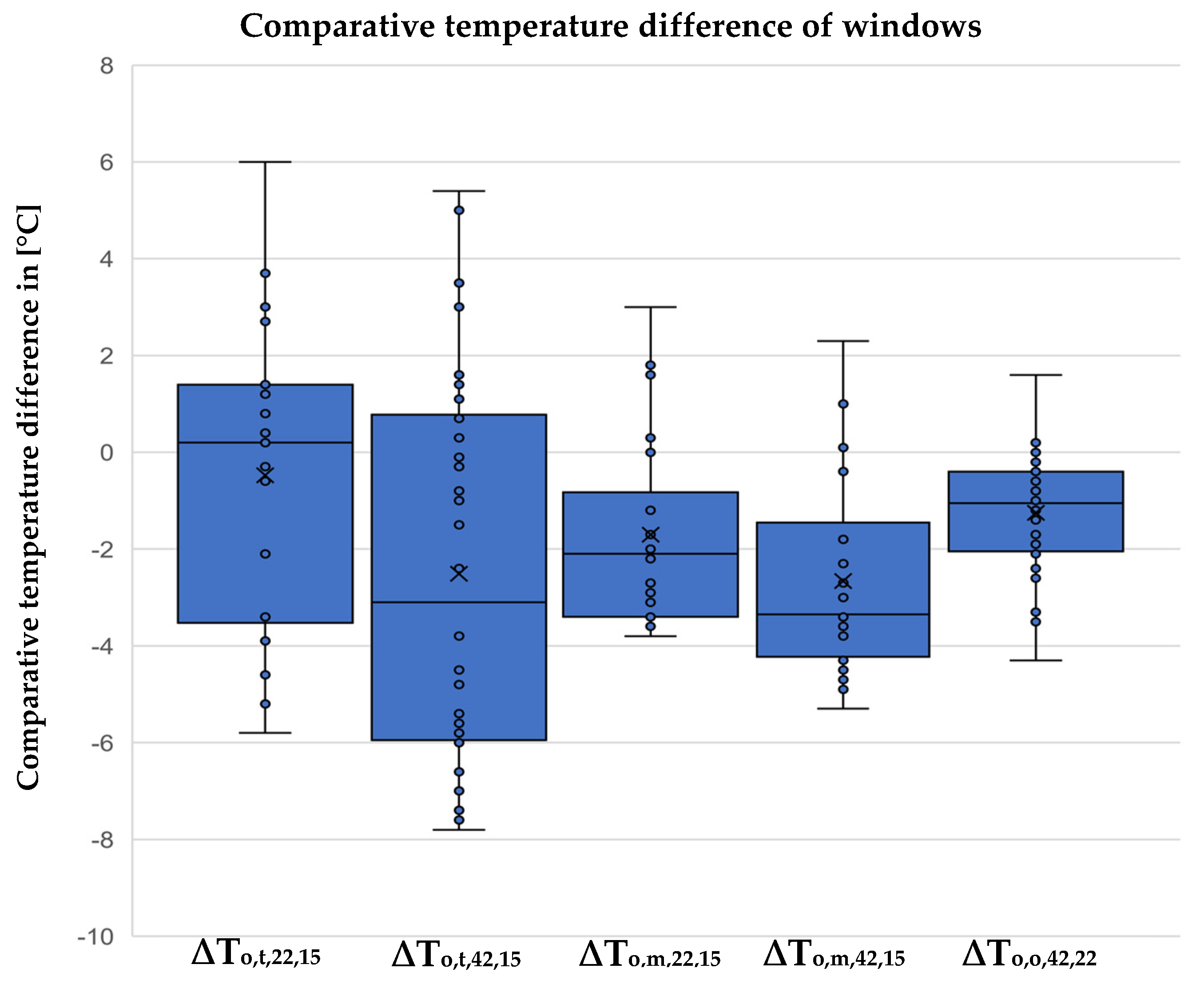
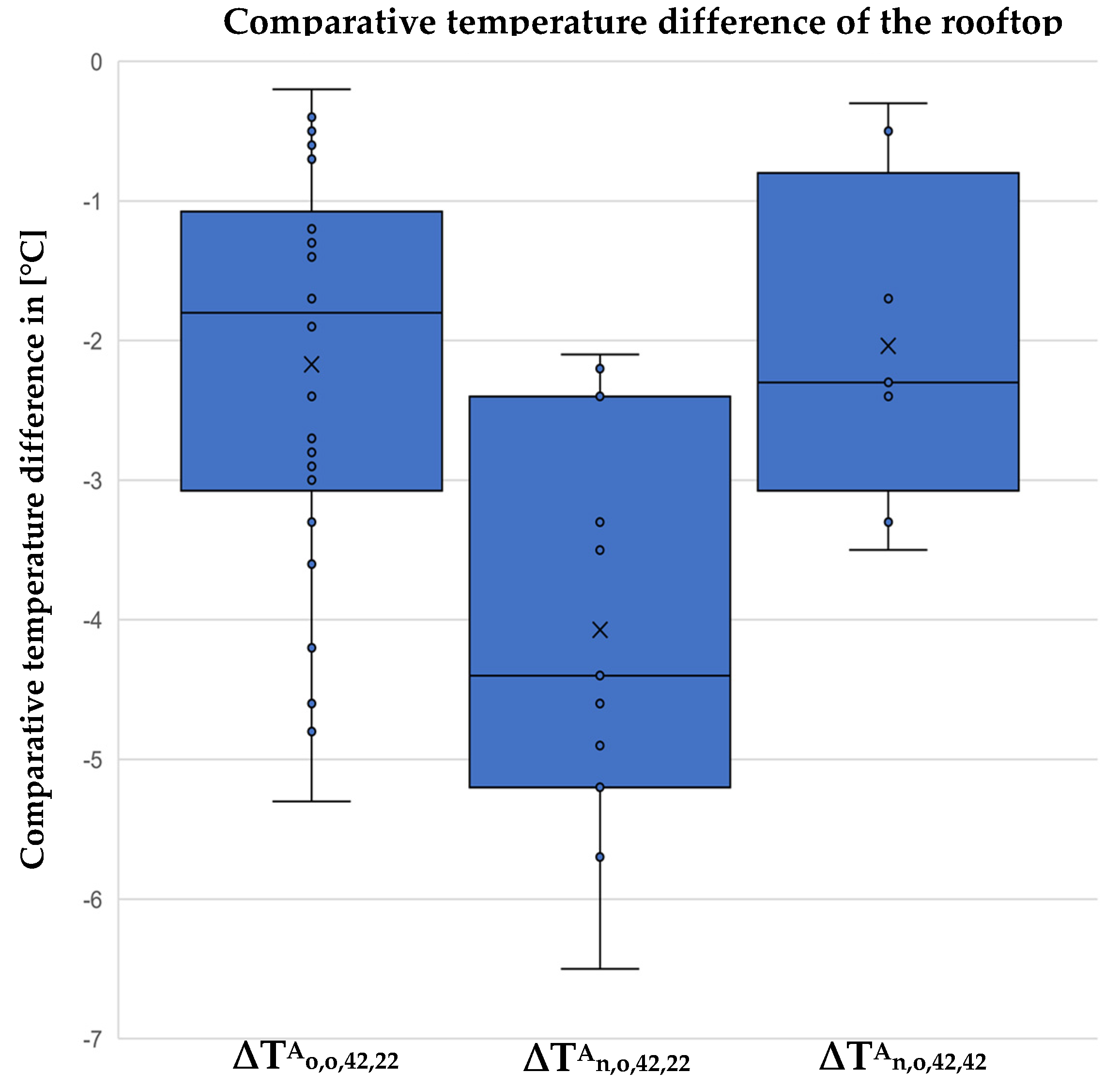
- Comparative temperature difference: In addition to being influenced by camera-intrinsic parameters and atmospheric conditions, the measured temperature values can vary depending on the thermal camera’s distance and angle to the object under scrutiny [27]. The following box plots show a comparison of the acquisition methods (automatic and manual UAV-based and hand-held camera) at varying distances. While all plots in Figure 9 display both positive and negative temperature differences, the values are concentrated in the negative regions. This alludes to a general trend of decreasing distances leading to an increased recorded temperature.The box for (comparison of automatic UAV-based oblique images recorded at different heights of 22 m and 42 m) shows on average negative temperature differences. The positive temperature differences of may be a result of either a steep camera angle to the façade or a slight vignetting present in the collected images.The box plots for images from manual and automatic UAV flights at different distances show both positive and negative comparative temperature values. Positive values of up to +6 °C for are caused by window reflections as well as inexplicable distortions within manually UAV-based images. The negative values can be attributed to the variations in distance between camera and building.The final box plots again depict both negative and positive values with the negative maximum reaching −7.8 °C. This maximum of is likely caused by the largest possible difference in camera distance (UAV-based recording being at 42 m compared to terrestrial at up to 15 m). The positive temperature difference values between the terrestrial and UAV-based images (, ) are again caused by window reflections which reduce recorded window temperatures in thermal images.Overall, it can be observed that larger differences in distance cause higher negative temperature deviations to occur. Additionally, the most conspicuous difference is found in the comparison of hand-held and UAV-based cameras. The more extreme ranges of both in comparison to the plots allude to the fact that distance itself might not be the only contributing factor—the different make and model of hand-held and UAV-based cameras as well as variations in angle and thus perspective of the ground-based acquisition method could be a cause for these observable variations.

- -
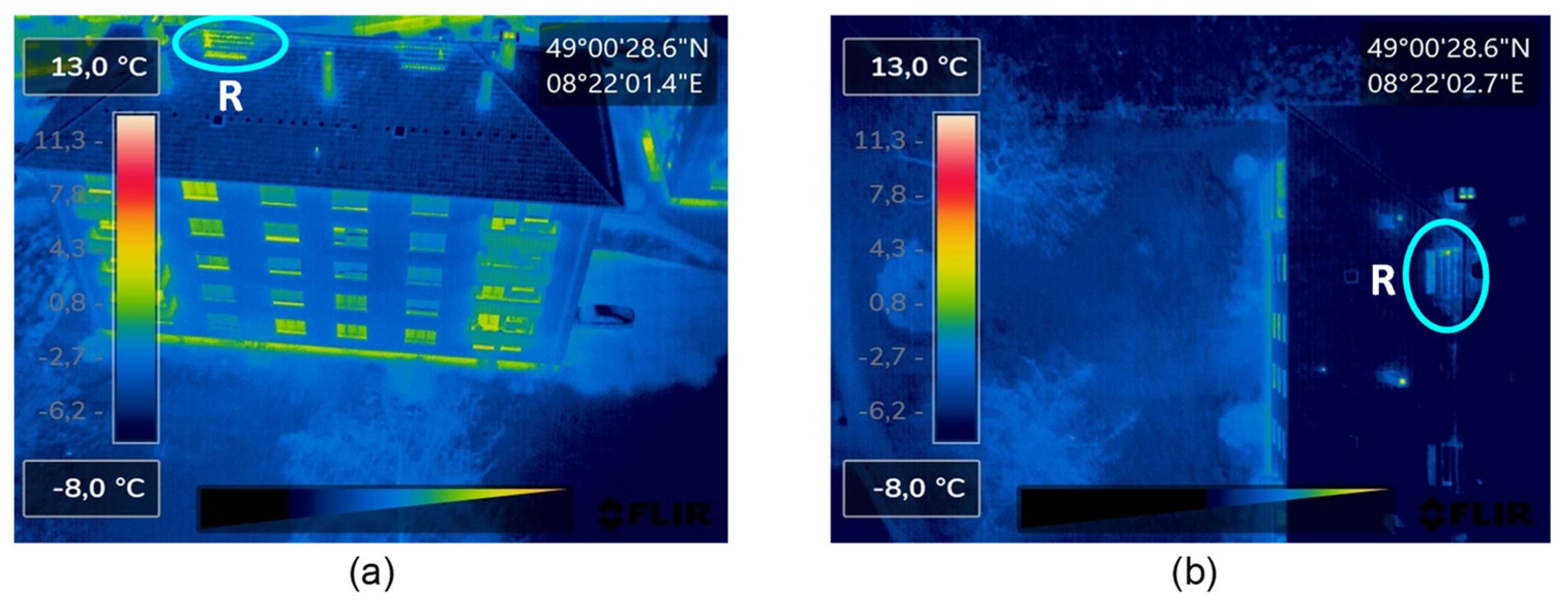
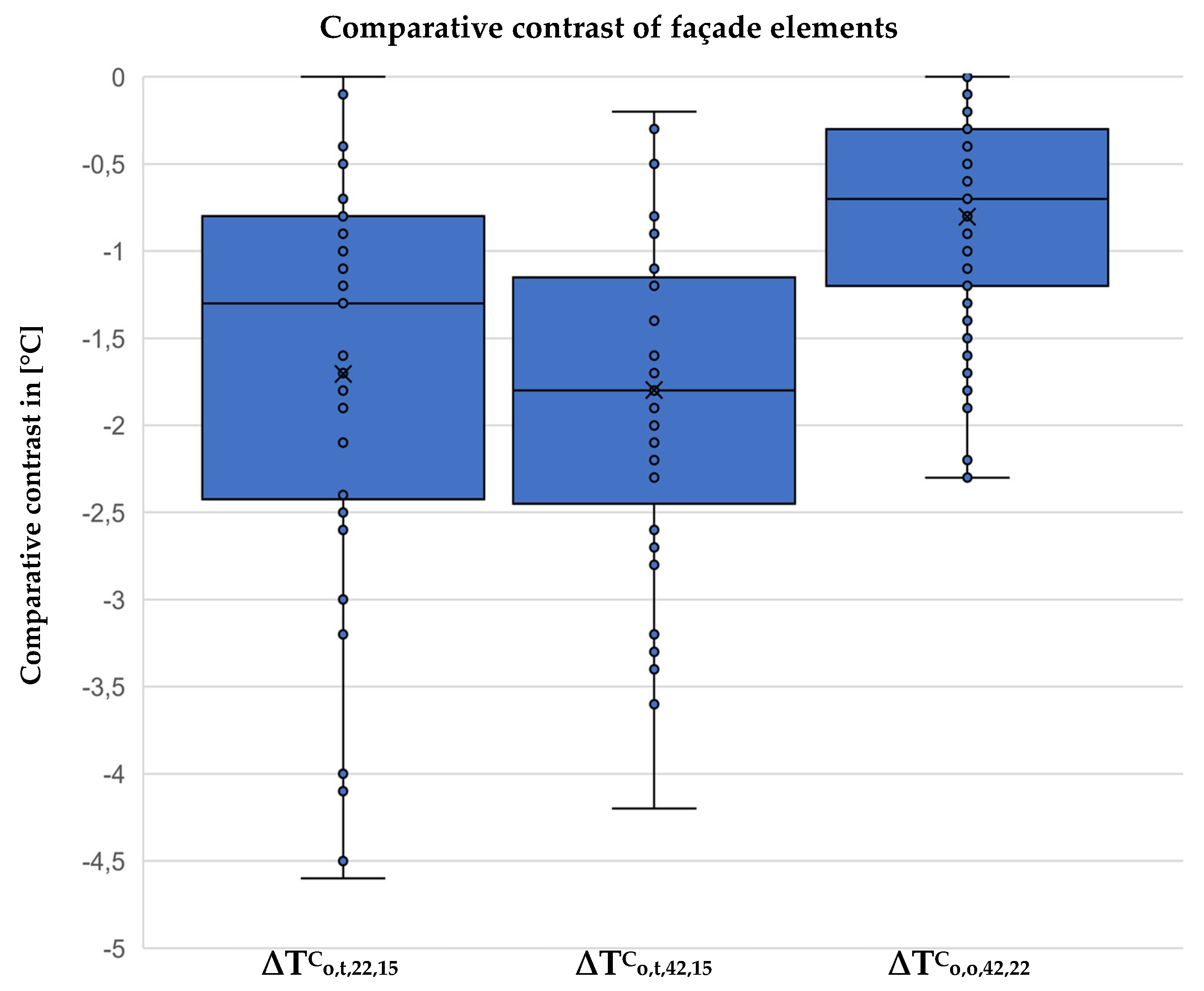
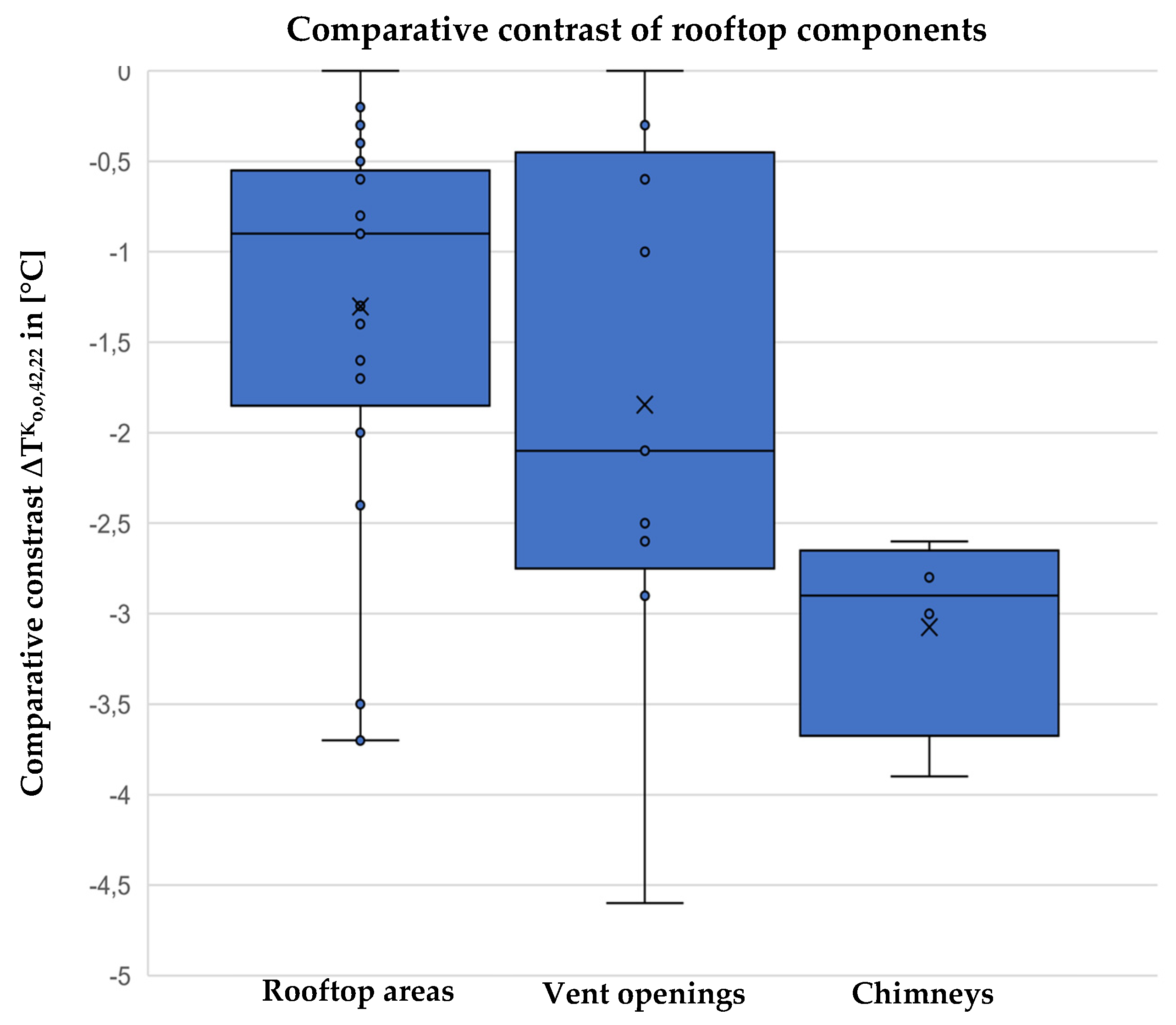
- Comparative contrast: The main factors that influence the contrast of thermographic images are camera angle and distance to the building under scrutiny. The effect of the camera angle becomes noticeable when comparing rooftops captured in nadir and 45° angle flight, with thermal anomalies displaying less contrast in images acquired at 90°. The cause of this lies with the prevalent weather conditions: clear, cloudless nights lead to increased reflections on rooftops [42]. As a result, the emissivity decreases and the contrast diminishes along with it. Figure 12 illustrates the described effect as it was observed on the rooftop of the building in Volzstr. 2.
4. Conclusions
4.1. Comparison of Acquisition Methods and General Recommendations
4.2. Favorable Settings for UAV-Based Acquisition and Specific Recommendations
4.3. Critical Review
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight | Building | Recording Angle [°] | Height above Building [m] | Distance to Façade [m] | Flight Speed [m/s] | Side and Front Overlap [%] | Flight/Recording Time [min] | Recorded Area [m2] | Number of Images 1 [-] | Image Rate [Images/min] | Flight Route Length [m] |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Sophienstr. 201–203 | 45 | 22 | - | 1 | 10 | 43 | 2500 | 130 | 3 | 2730 |
| 2 | Sophienstr. 201–203 | 45 | 22 | - | 3 | 10 | 20 | 2500 | 130 | 6.6 | 2730 |
| 3 | Sophienstr. 201–203 | 45 | 22 | - | 5 | 10 | 13 | 2500 | 130 | 10 | 2730 |
| 4 | Sophienstr. 201–203 | 45 | 42 | - | 3 | 10 | 25 2 | 2500 | 104 | 4.2 | 2730 3 |
| 5 | Sophienstr. 201–203 | 90 4 | 22 | - | 3 | 10 | - | 2500 | - | - | - |
| 6 | Sophienstr. 201–203 | 90 | 42 | - | 3 | 10 | - | 2500 | - | - | - |
| 1 | Volzstr. 2 | 45 | 22 | - | 1 | 10 | 29 | 2000 | 105 | 3.6 | 2275 |
| 2 | Volzstr. 2 | 45 | 22 | - | 3 | 10 | 13 | 2000 | 105 | 8.1 | 2275 |
| 3 | Volzstr. 2 | 45 | 22 | - | 5 | 10 | 7 | 2000 | 105 | 15 | 2275 |
| 4 | Volzstr. 2 | 45 | 42 | - | 3 | 10 | 21 | 2000 | 90 | 4.3 | 2275 |
| 5 | Volzstr. 2 | 90 | 22 | - | 3 | 10 | - | 2000 | - | - | |
| 6 | Volzstr. 2 | 90 | 42 | - | 3 | 10 | - | 2000 | - | - | |
| 1 | Wichernstr. 4 | 45 | 22 | - | 1 | 10 | 34 | 1700 | 120 | 3.5 | 2045 |
| 2 | Wichernstr. 4 | 45 | 22 | - | 3 | 10 | 15 | 1700 | 120 | 8 | 2045 |
| 3 | Wichernstr. 4 | 45 | 22 | - | 5 | 10 | 11 | 1700 | 120 | 10.9 | 2045 |
| 4 | Wichernstr. 4 | 45 | 42 | - | 3 | 10 | 18 | 1700 | 98 | 5.4 | 2650 |
| 5 | Wichernstr. 4 | 90 | 22 | - | 3 | 10 | - | 1700 | - | - | - |
| 6 | Wichernstr. 4 | 90 | 42 | - | 3 | 10 | - | 1700 | - | - | - |
| 1 | Wichernstr. 10–18 | 45 | 22 | - | 1 | 10 | 40 | 3600 | 145 | 3.6 | 3870 |
| 2 | Wichernstr. 10–18 | 45 | 22 | - | 3 | 10 | 19 | 3600 | 145 | 7.6 | 3870 |
| 3 | Wichernstr. 10–18 | 45 | 22 | - | 5 | 10 | 12 | 3600 | 145 | 12.1 | 3870 |
| 4 | Wichernstr. 10–18 | 45 | 42 | - | 3 | 10 | 22 | 3600 | 117 | 5.3 | 3870 |
| 5 | Wichernstr. 10–18 | 90 | 22 | - | 3 | 10 | - | 3600 | - | - | - |
| 6 | Wichernstr. 10–18 | 90 | 42 | - | 3 | 10 | - | 3600 | - | - | - |
| 7 5 | Wichernstr. 4 | 0 | - | 4 | - | - | 15 | 180 | 23 | 1.5 | - 6 |
| 8 | Wichernstr. 4 | 0 | - | 8 | - | - | 30 | 520 | 48 | 1.6 | - |
| 9 | Wichernstr. 4 | 0 | - | 15 | - | - | 14 | 520 7 | 22 | 1.6 | - |
| 9 | Wichernstr. 10–18 | 0 | - | 15 | - | - | 29 | 900 | 46 | 1.6 | - |
References
- Gade, R.; Moeslund, T.B. Thermal cameras and applications: A survey. Mach. Vis. Appl. 2014, 25, 245–262. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Antonino-Daviu, J.A.; de Jesus Romero-Troncoso, R. Recent Industrial Applications of Infrared Thermography: A Review. IEEE Trans. Ind. Inform. 2018, 15, 615–625. [Google Scholar] [CrossRef]
- Sarawade, A.A.; Charniya, N.N. Infrared Thermography and its Applications: A Review. In Proceedings of the 2018 3rd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 15–16 October 2018; pp. 280–285. [Google Scholar] [CrossRef]
- Kirimtat, A.; Krejcar, O. A review of infrared thermography for the investigation of building envelopes: Advances and prospects. Energy Build. 2018, 176, 390–406. [Google Scholar] [CrossRef]
- Martin, M.; Chong, A.; Biljecki, F.; Miller, C. Infrared thermography in the built environment: A multi-scale review. Renew. Sustain. Energy Rev. 2022, 165, 112540. [Google Scholar] [CrossRef]
- Bitelli, G.; Conte, P.; Csoknyai, T.; Franci, F.; Girelli, V.A.; Mandanici, E. Aerial Thermography for Energetic Modelling of Cities. Remote Sens. 2015, 7, 2152–2170. [Google Scholar] [CrossRef]
- Previtali, M.; Barazzetti, L.; Brumana, R.; Roncoroni, F. Thermographic analysis from UAV platforms for energy efficiency retrofit applications. J. Mob. Multimed. 2013, 9, 66–82. [Google Scholar] [CrossRef]
- Yin, C.; Xiong, Z.; Chen, H.; Wang, J.; Cooper, D.; David, B. A literature survey on smart cities. Sci. China Inf. Sci. 2015, 58, 1–18. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength From Drones Over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021, 22, 402–416. [Google Scholar] [CrossRef]
- Sharma, R.; Arya, R. UAV based long range environment monitoring system with Industry 5.0 perspectives for smart city infrastructure. Comput. Ind. Eng. 2022, 168, 108066. [Google Scholar] [CrossRef]
- Krawczyk, J.; Mazur, A.; Sasin, T.; Stokłosa, A. Infrared building inspection with unmanned aerial vehicles. Trans. Inst. Aviat. 2015, 240, 32–48. [Google Scholar] [CrossRef]
- Entrop, A.G.; Vasenev, A. Infrared drones in the construction industry: Designing a protocol for building thermography procedures. Energy Procedia 2017, 132, 63–68. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Daffara, C.; Muradore, R.; Piccinelli, N.; Gaburro, N.; De Rubeis, T.; Ambrosini, D. A Cost-Effective System for Aerial 3D Thermography of Buildings. J. Imaging 2020, 6, 76. [Google Scholar] [CrossRef]
- Dahaghin, M.; Samadzadegan, F.; Javan, F.D. Precise 3D extraction of building roofs by fusion of UAV-based thermal and visible images. Int. J. Remote Sens. 2021, 42, 7002–7030. [Google Scholar] [CrossRef]
- Hou, Y.; Chen, M.; Volk, R.; Soibelman, L. Investigation on performance of RGB point cloud and thermal information data fusion for 3D building thermal map modeling using aerial images under different experimental conditions. J. Build. Eng. 2022, 45, 103380. [Google Scholar] [CrossRef]
- Benz, A.; Taraben, J.; Debus, P.; Habte, B.; Oppermann, L.; Hallermann, N.; Voelker, C.; Rodehorst, V.; Morgenthal, G. Framework for a UAS-based assessment of energy performance of buildings. Energy Build. 2021, 250, 111266. [Google Scholar] [CrossRef]
- Mayer, Z.; Heuer, J.; Volk, R.; Schultmann, F. Aerial Thermographic Image-Based Assessment of Thermal Bridges Using Representative Classifications and Calculations. Energies 2021, 14, 7360. [Google Scholar] [CrossRef]
- Zahradník, D. Roof Leak Detection by Thermography of As-Built Bim. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 251–256. [Google Scholar] [CrossRef]
- Mirzabeigi, S.; Razkenari, M. Automated Vision-Based Building Inspection Using Drone Thermography. In Proceedings of the Construction Research Congress, Arlington, VA, USA, 9–12 March 2022; pp. 737–746. [Google Scholar] [CrossRef]
- Gómez, J.; Tascón, A. Protocolo para el uso de vehículos aéreos no tripulados en la inspección de edificios agroindustriales. Inf. Constr. 2021, 73, e421. [Google Scholar] [CrossRef]
- Mayer, Z.; Epperlein, A.; Volk, R.; Vollmer, E.; Schultmann, F. Comparison of building thermography approaches using terrestrial and aerial thermographic images. IOP Conf. Ser. Earth Environ. Sci. 2022, 1078, 012026. [Google Scholar] [CrossRef]
- Google Earth. Karlsruhe. 2022. Available online: https://earth.google.com/web/@49.0073106,8.36729178,115.40952834a,389.61303477d,35y,16.33359823h,59.7531201t,-0r (accessed on 12 August 2022).
- DJI. Matrice 300—DJI. 2022. Available online: https://www.dji.com/de/matrice300 (accessed on 10 January 2022).
- FLIR. FLIR XT2 Product Information (Wilsonville, USA). 2021. Available online: https://www.flir.de/products/xt2/ (accessed on 10 January 2022).
- FLIR. FLIR T-Series (Wilsonville, USA). 2021. Available online: https://www.flir.com/instruments/t-series/ (accessed on 10 January 2022).
- Fouad, N.A.; Richter, T. Leitfaden Thermografie im Bauwesen: Theorie, Anwendungsgebiete, Praktische Umsetzung; Fraunhofer IRB Verlag: Stuttgart, Germany, 2012; ISBN 3816784569. [Google Scholar]
- Timeanddate. Wetter im Februar 2022 in Karlsruhe, Baden-Württemberg, Deutschland. 2022. Available online: https://www.timeanddate.de/wetter/deutschland/karlsruhe/rueckblick?month=2&year=2022 (accessed on 12 March 2022).
- Lucchi, E. Applications of the infrared thermography in the energy audit of buildings: A review. Renew. Sustain. Energy Rev. 2018, 82, 3077–3090. [Google Scholar] [CrossRef]
- DIN 4108-2; Wärmeschutz und Energie-Einsparung in Gebäuden—Teil 2: Mindestanforderungen an den Wärmeschutz (May Be Translated as: Thermal Protection and Energy Economy in Buildings—Part 2: Minimum Requirements to Thermal Insulation). Deutsches Institut für Normung: Berlin, Germany, 2013.
- FLIR Systems Inc. User’s Manual Flir Thermal Studio. 2022. Available online: https://www.sahkonumerot.fi/6708162/doc/operatinginstructions/ (accessed on 12 August 2022).
- Fouad, N. Bauphysik-Kalender; (May Be Translated as: Building Physics Calendar); Ernst. Wilhelm & Sohn (Verlag): Berlin, Germany, 2010; ISBN 978-3-433-02938-1. [Google Scholar]
- FLIR Systems Inc. What Happens When I Select Histogram Equalization as the Image Representation in FLIR Tools? 2022. Available online: https://www.flir.com/support-center/Instruments/what-happens-when-i-select-histogram-equalization-as-the-image-presentation-in-flir-tools/ (accessed on 10 October 2022).
- Mayer, Z.; Epperlein, A.; Vollmer, E.; Volk, R. Aerial and Terrestrial Thermal Images of German Multi-Family Buildings Version 1.0; Zenodo: Geneva, Switzerland, 2022. [Google Scholar] [CrossRef]
- Sieberth, T.; Wackrow, R.; Chandler, J.H. Motion blur disturbs—The influence of motion-blurred images in photogrammetry. Photogramm. Rec. 2014, 29, 434–453. [Google Scholar] [CrossRef]
- O’Connor, J.; Smith, M.J.; James, M.R. Cameras and settings for aerial surveys in the geosciences. Prog. Phys. Geogr. Earth Environ. 2017, 41, 325–344. [Google Scholar] [CrossRef]
- Liang, S.; Li, X.; Wang, J. Advanced Remote Sensing: Terrestrial Information Extraction and Applications; Elsevier Science & Technology: San Diego, CA, USA, 2012; ISBN 9780123859556. [Google Scholar]
- Government of Canada. Spatial Resolution, Pixel Size, and Scale. 2015. Available online: https://www.nrcan.gc.ca/maps-tools-and-publications/satellite-imagery-and-air-photos/tutorial-fundamentals-remote-sensing/satellites-and-sensors/spatial-resolution-pixel-size-and-scale/9407 (accessed on 30 September 2022).
- Ortiz-Sanz, J.; Gil-Docampo, M.; Arza-García, M.; Cañas-Guerrero, I. IR Thermography from UAVs to Monitor Thermal Anomalies in the Envelopes of Traditional Wine Cellars: Field Test. Remote Sens. 2019, 11, 1424. [Google Scholar] [CrossRef]
- Böhringer, J.; Bühler, P.; Schlaich, P.; Sinner, D. Kompendium der Mediengestaltung: Konzeption und Gestaltung. I; Springer Vieweg: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Filippeschi, S.; Leccese, F. Infrared thermography to visualize the texture of historical buildings in Tuscany. In Proceedings of the 8th International Conference on Non-Destructive Investigations and Microanalysis for the Diagnostics and Conservation of the Cultural and Environmental Heritage, Lecce, Italy, 15–19 May 2005; Available online: https://www.academia.edu/29499780/Infrared_Thermography_to_Visualize_the_Texture_of_Historical_Buildings_in_Tuscany (accessed on 1 January 2023).
- Vollmer, M.; Möllmann, K. Infrared Thermal Imaging Fundamentals, Research and Applications; Wiley-VCH. ePDF: Weinheim, Germany, 2017; ISBN 978-3-527-69332-0. [Google Scholar]
- Teledyne FLIR. Halo or Vignetting Image on a Vue, Vue Pro, Vue Pro R, Duo, Duo Pro, Duo Pro R, XT or XT2. 2022. Available online: https://flir.custhelp.com/app/answers/detail/a_id/3494/related/1/session/L2F2LzEvdGltZS8xNjY1NjU3Njc0L2dlbi8xNjY1NjU3Njc0L3NpZC9mVW12VnJQZ2lRM0xfZ1NXT3FUYldVaUxLYnExUE16dzBfZERHbjB3TEJaY1lnbE9VTkV2bUFzRSU3RXRUb0RSWTNFaXpTbk9hTk5ZaUU3a1FYd0dzendFbHVYdzI1TWFCdkRtWkUxN2hXU1RnelFHRE1FTkh0OVVxdyUyMSUyMQ%3D%3D (accessed on 30 September 2022).
- DIN 277:2021-08: DIN 277; Grundflächen und Rauminhalte im Hochbau. (May Be Translated as: Floor Areas and Volumes in Building Construction). Deutsches Institut für Normung: Berlin, Germany, 2013.














| Publication | Year | UAV Flight Settings |
|---|---|---|
| Krawczyk et al. [11] | 2015 | No information provided |
| Entrop and Vasenev [12] | 2017 | 5–10 m vertical distance to building roof, 1 m/s flight speed |
| Rakha and Gorodetsky [13] | 2018 | 12 m horizontal distance to building façade, 45° and 10° camera angle |
| Daffara et al. [14] | 2020 | 10 m horizontal distance to building façade, 0° camera angle |
| Dahaghin et al. [15] | 2021 | 48–218 m vertical distance to ground |
| Hou et al. [16] | 2022 | 60 m and 35 m vertical distance to ground, 45° and 30° camera angles |
| Benz et al. [17] | 2021 | 15 m distance to the building |
| Mayer et al. [18] | 2021 | 60–80 m vertical distance to ground |
| Zahradník [19] | 2022 | 20 m vertical distance to ground, 90° camera angle, 2 m/s flight speed |
| Mirzabeigi and Razkenari [20] | 2022 | 6.5 m distance to building, ground-based terrestrial camera for comparision |
| Gómez and Tascón [21] | 2021 | 10 m horizontal distance to building façade, 20 m vertical distance to building rooftop peak |
| Flight | Building | Automatically/Manually Performed Flight Route | Camera Angle [°] | Height above Ground [m] | Height above Building [m] | Distance to Façade [m] | Flight Speed [m/s] |
|---|---|---|---|---|---|---|---|
| 1 | Full area | Automatically | 45 (oblique) | 40 | 22 | - | 1 |
| 2 | Full area | Automatically | 45 (oblique) | 40 | 22 | - | 3 |
| 3 | Full area | Automatically | 45 (oblique) | 40 | 22 | - | 5 |
| 4 | Full area | Automatically | 45 (oblique) | 60 | 42 | - | 3 |
| 5 | Full area | Automatically | 90 (nadir) | 40 | 22 | - | 3 |
| 6 | Full area | Automatically | 90 (nadir) | 60 | 42 | - | 3 |
| 7 | Wichernstr. 4 | Manually | 0 (manual) | 4 to 12 | - | 4 | - |
| 8 | Wichernstr. 4 | Manually | 0 (manual) | 4 to 12 | - | 8 | - |
| 9 | Wichernstr. 4, 10–18 | Manually | 0 (manual) | 4 to 12 | - | 15 | - |
| Building | Sophienstr. 201–203 | Volzstr. 2 | Wichernstr. 4 | Wichernstr. 10–18 | |
|---|---|---|---|---|---|
| Building Part | |||||
| Balcony | 2 | 8 | 7 | 4 | |
| Building base | 1 | - | 2 | - | |
| Chimney | - | - | 2 | - | |
| Door | - | 1 | - | - | |
| Façade | 3 | 4 | 2 | 6 | |
| Glass façade | - | 2 | - | - | |
| Rooftop | - | 3 | 4 | 7 | |
| Staircase | 2 | 1 | - | 3 | |
| Vent opening | - | 2 | 2 | 2 | |
| Window | 10 | 4 | 19 | 9 | |
| Total | 18 | 25 | 38 | 31 | |
| Acquisition Method | Automatic UAV Flights | Manual UAV Flights | Hand-Held, Ground-Based Capture | |
|---|---|---|---|---|
| Criterion | ||||
| Motion blur | Unaffected (at up to 5 m/s) | Unaffected (stationary) | Unaffected (stationary) | |
| Feature discernibility | Medium (façades less detailed, large distances necessary) | High (same detail throughout, small distances possible) | Medium (non-eye-level areas less details, small distances possible) | |
| Accessibility | Medium (with crosshatch only minor blind spots, inaccessibility of balcony slabs) | High (no blind spots, all areas accessible) | Low (large blind spots, entire envelope parts like rooftops hardly accessible, good accessibility of balcony slabs) | |
| Comp. temperature difference | Weak (large distances necessary) | Strong (small distances possible) | Strong (small distances possible) | |
| Comp. contrast | Weak (though no window reflections, large distances necessary) | Strong (despite pronounced window reflections, small distances possible) | Strong (despite pronounced window reflections, small distances possible) | |
| Time efficiency | Medium (long setup, scalable approach) | Low (long setup and stop-and-go image capture) | Low (stop-and-go image capture on foot) | |
| Overall | Fastest method but with least detail | Slowest method but constant, high detail | Enough detail but accessibility issues | |
| Automated Flights | Manual Flights/Recordings | ||||
|---|---|---|---|---|---|
| 12 m height above building, 45° camera angle | 22 m height above building, 45° camera angle | 42 m height above building, 45° camera angle | 42 m height above building, 90° camera angle | Up to 15 m horizontal distance, 0° camera angle | |
| Qualitative analysis of the rooftop | Recommended | Recommended | Recommended only for overviews | Recommended only for overviews | Not studied * |
| Qualitative analysis of the façade | Recommended | Recommended | Recommended only for overviews | Not recommended | Recommended |
| Quantitative analysis of the rooftop | Recommended | Not recommended | Not recommended | Not recommended | Not studied * |
| Quantitative analysis of the façade | Not recommended | Not recommended | Not recommended | Not recommended | Recommended |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayer, Z.; Epperlein, A.; Vollmer, E.; Volk, R.; Schultmann, F. Investigating the Quality of UAV-Based Images for the Thermographic Analysis of Buildings. Remote Sens. 2023, 15, 301. https://doi.org/10.3390/rs15020301
Mayer Z, Epperlein A, Vollmer E, Volk R, Schultmann F. Investigating the Quality of UAV-Based Images for the Thermographic Analysis of Buildings. Remote Sensing. 2023; 15(2):301. https://doi.org/10.3390/rs15020301
Chicago/Turabian StyleMayer, Zoe, Andres Epperlein, Elena Vollmer, Rebekka Volk, and Frank Schultmann. 2023. "Investigating the Quality of UAV-Based Images for the Thermographic Analysis of Buildings" Remote Sensing 15, no. 2: 301. https://doi.org/10.3390/rs15020301
APA StyleMayer, Z., Epperlein, A., Vollmer, E., Volk, R., & Schultmann, F. (2023). Investigating the Quality of UAV-Based Images for the Thermographic Analysis of Buildings. Remote Sensing, 15(2), 301. https://doi.org/10.3390/rs15020301