




A Multifactor-Based Random Forest Regression Model to Reconstruct a Continuous Deformation Map in Xi’an, China


Abstract
:1. Introduction
2. Study Area and Datasets
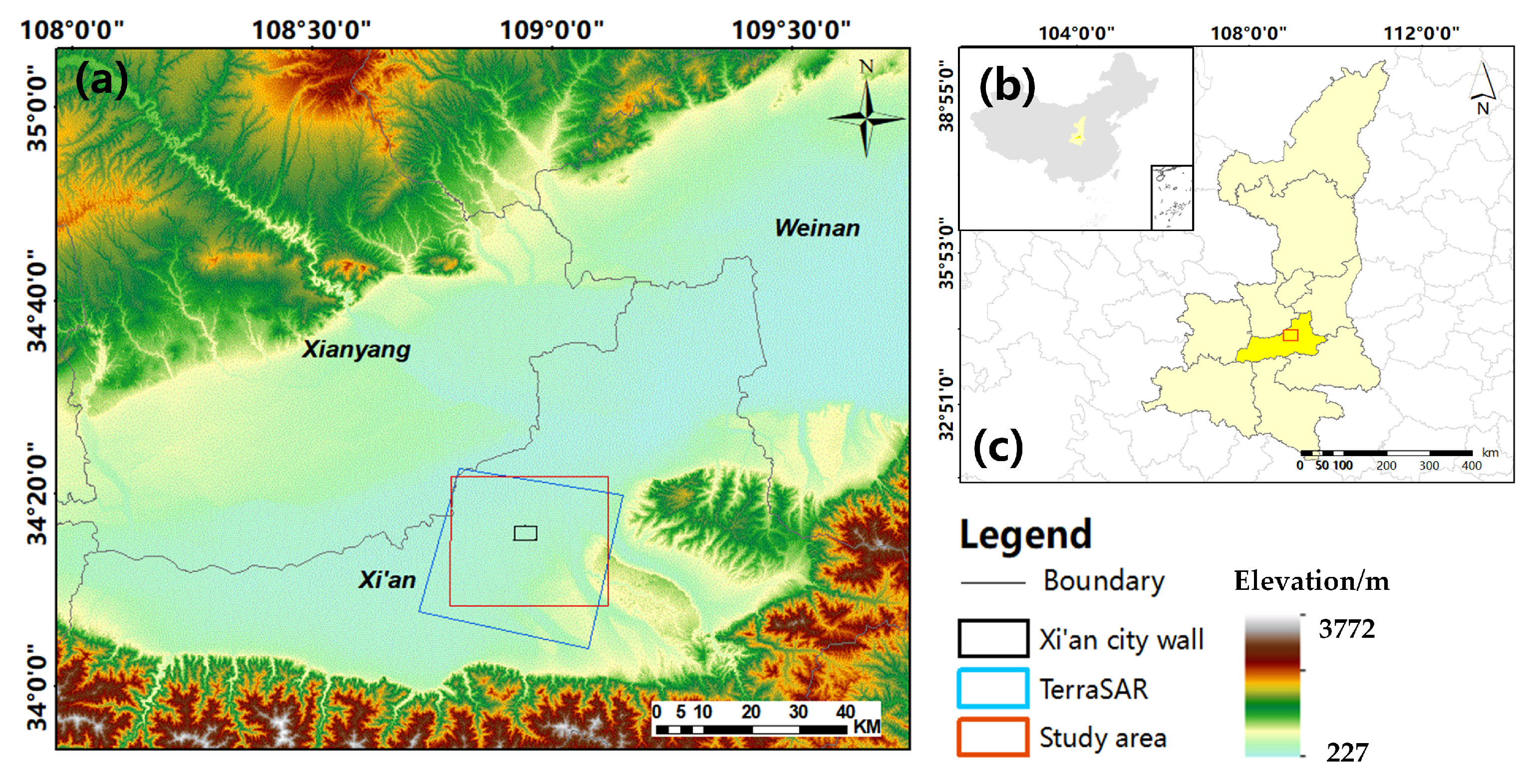
2.1. Study Area
2.2. Datasets
2.2.1. SAR and DEM
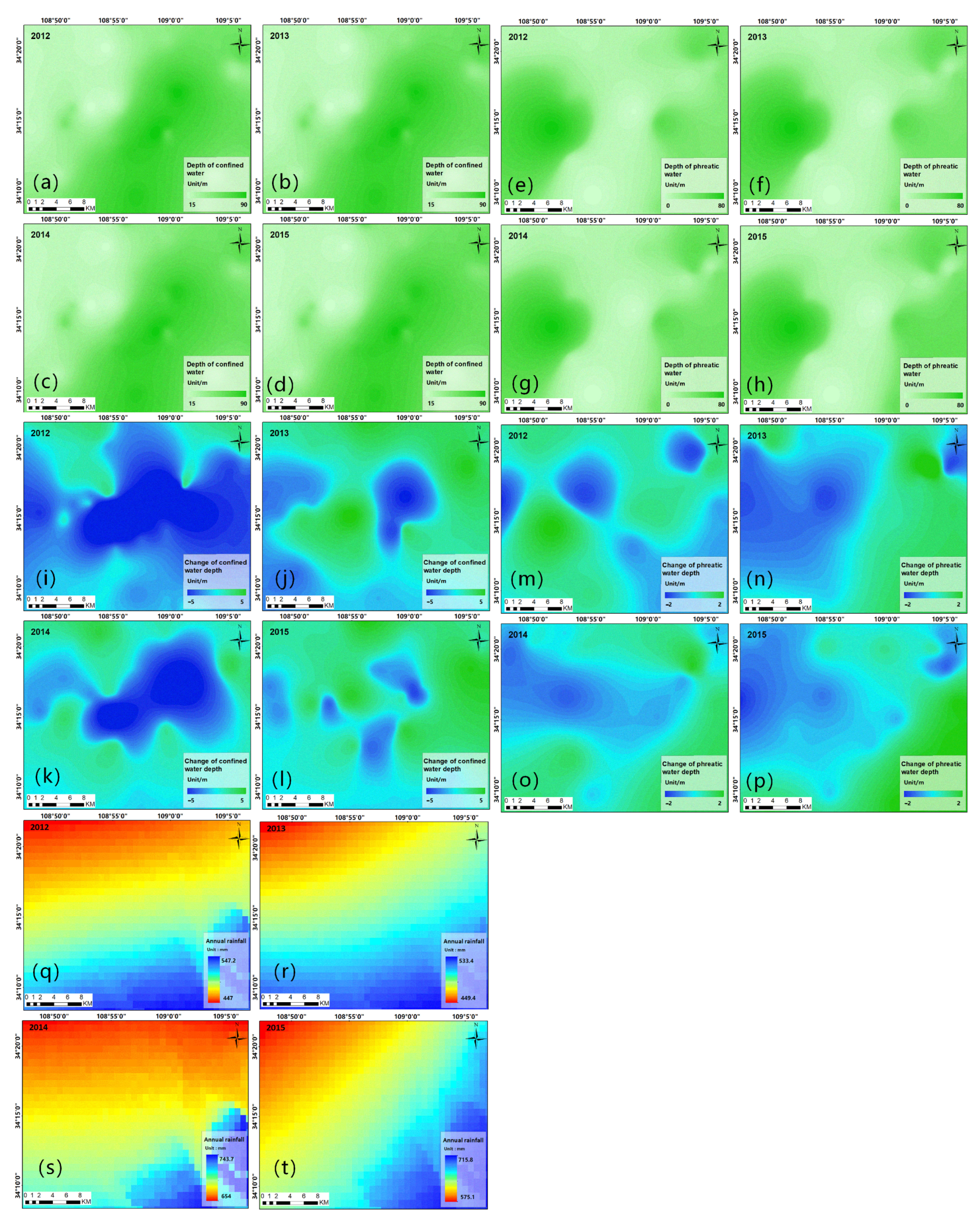
2.2.2. Ground Subsidence Influence Factors
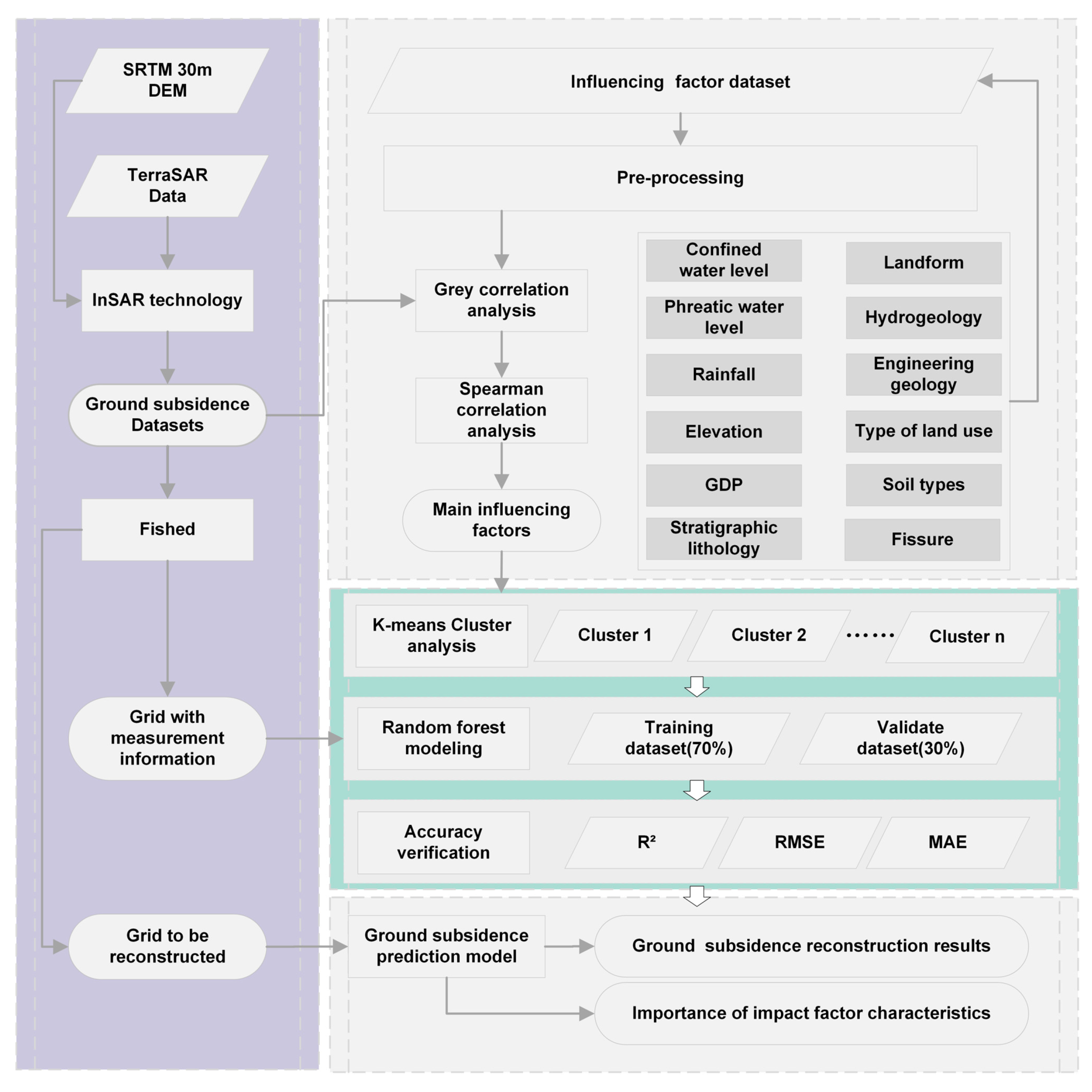
3. Methodology
3.1. SBAS-InSAR Data Processing
3.2. Pre-Processing of Influencing Factors
3.3. Ground Deformation Prediction Model
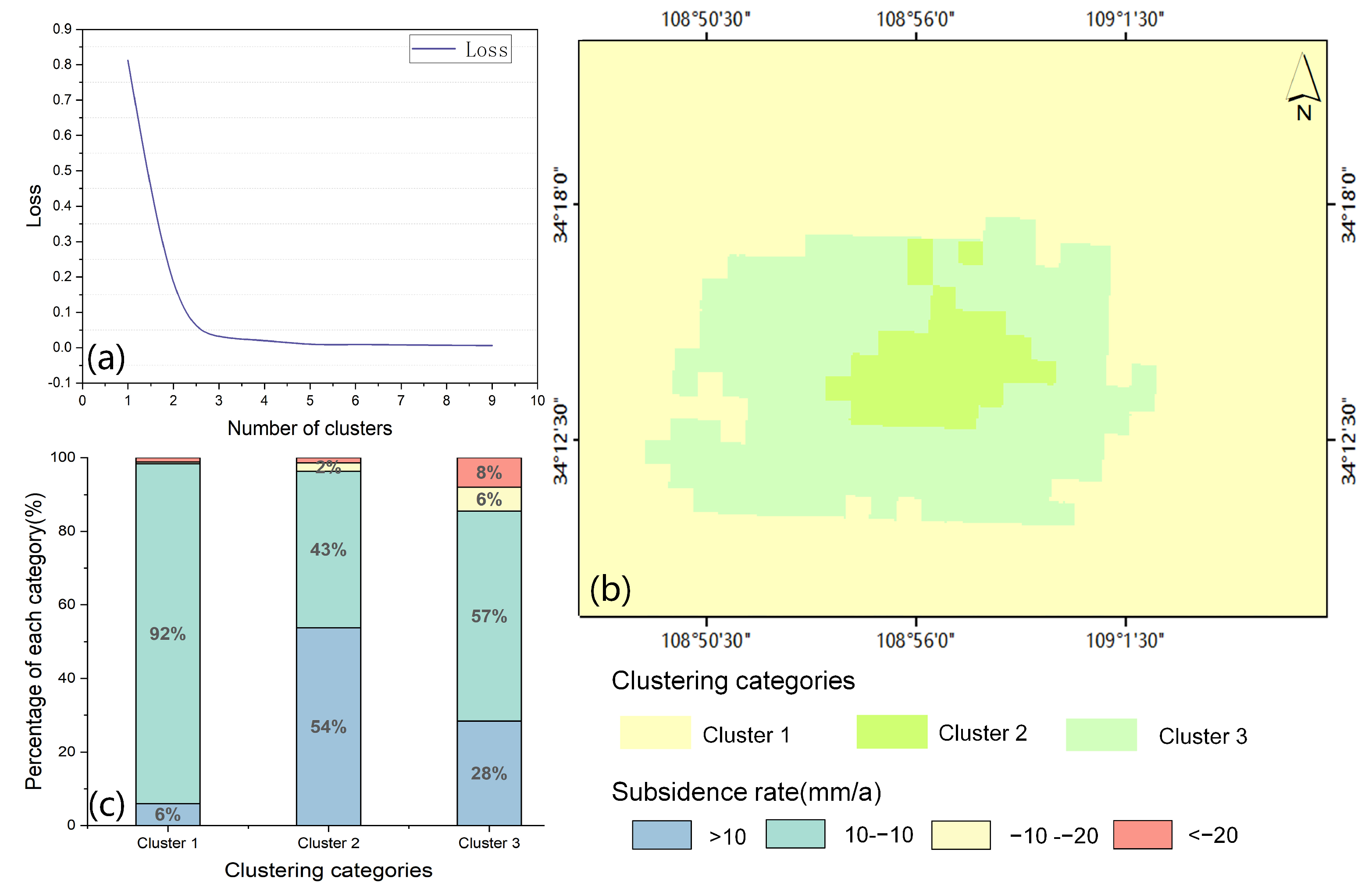
3.3.1. K-Means Clustering
3.3.2. Random Forest Regression
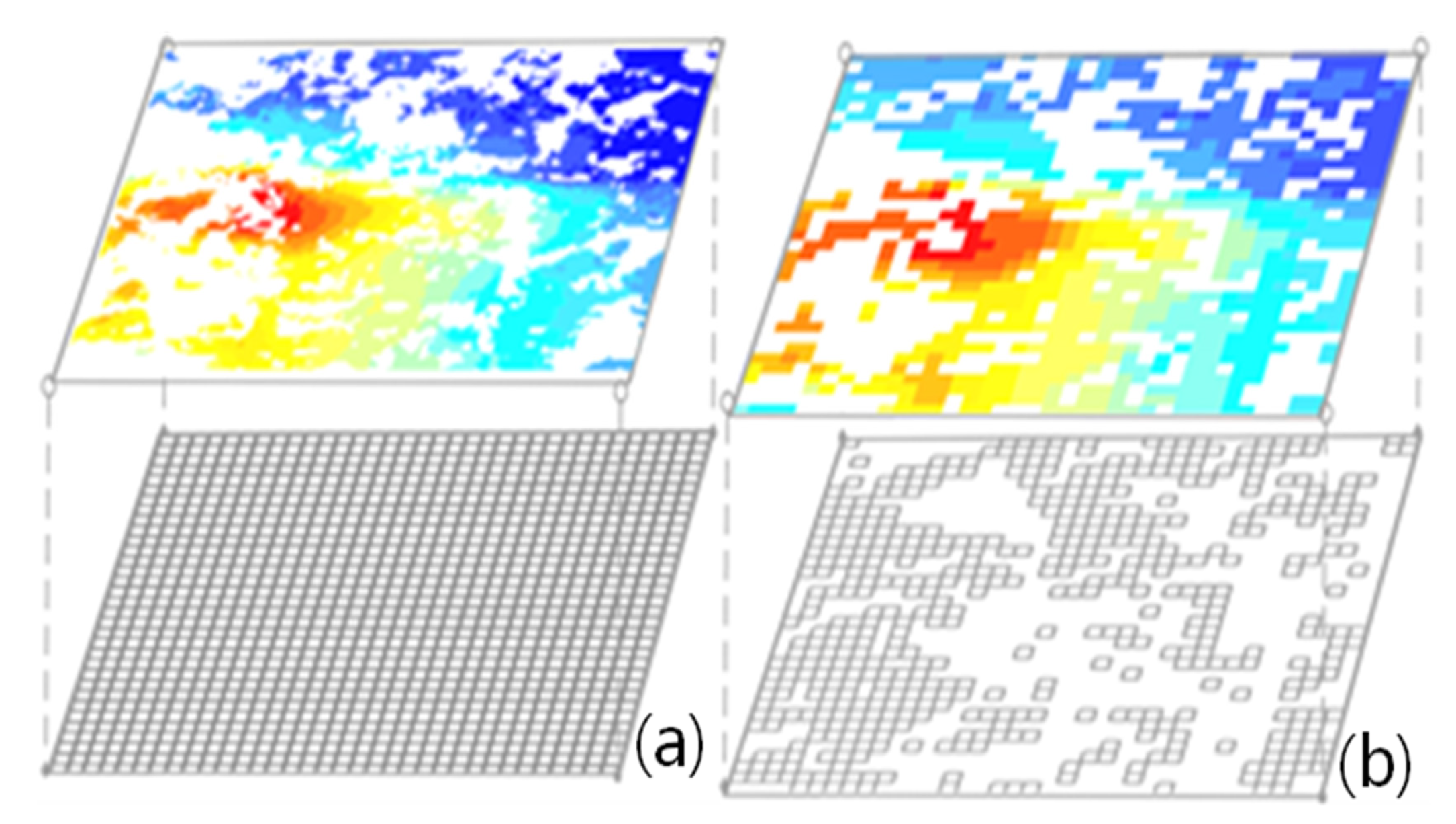
3.4. Ground Deformation Prediction Model with K-RFR
4. Results and Analyses
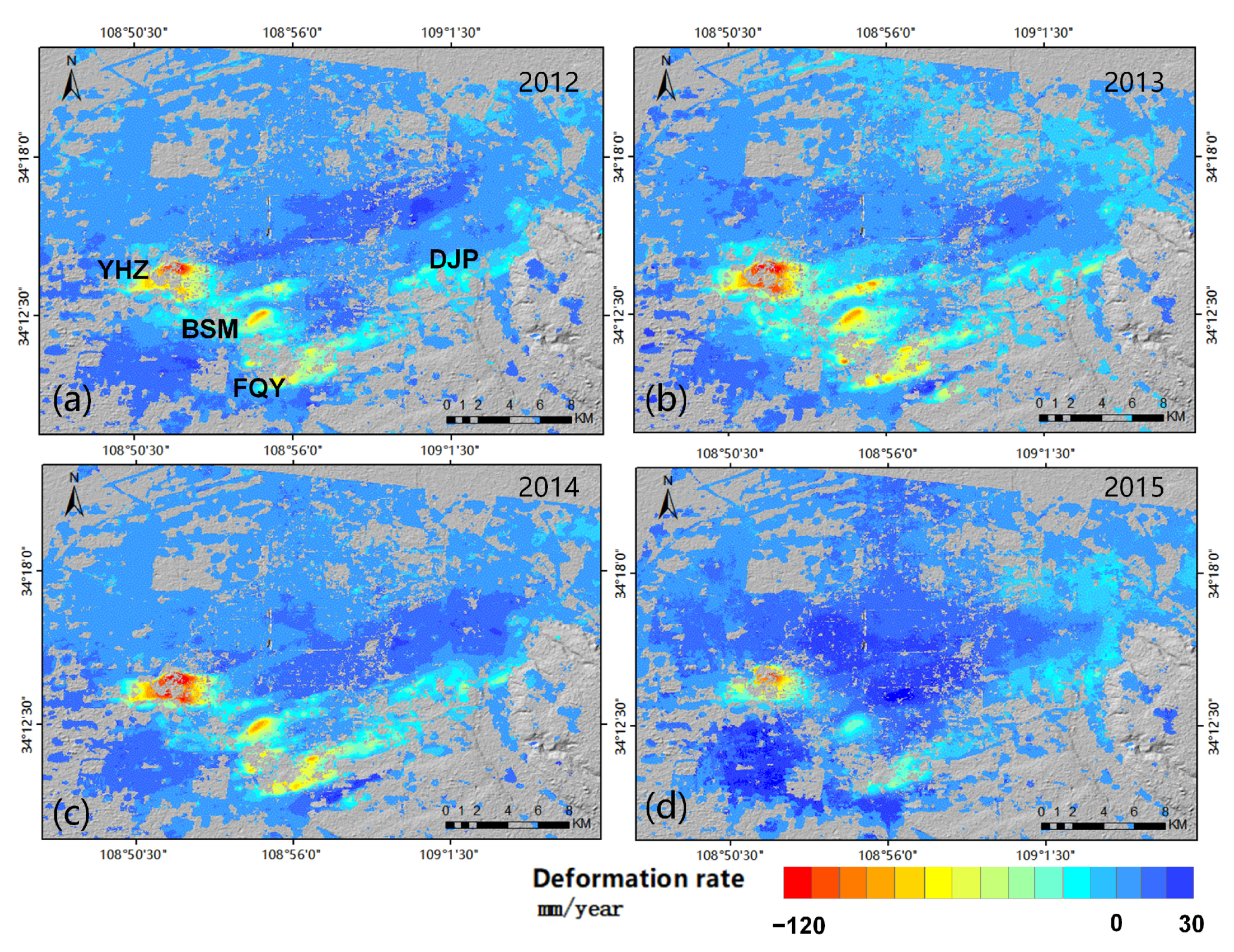
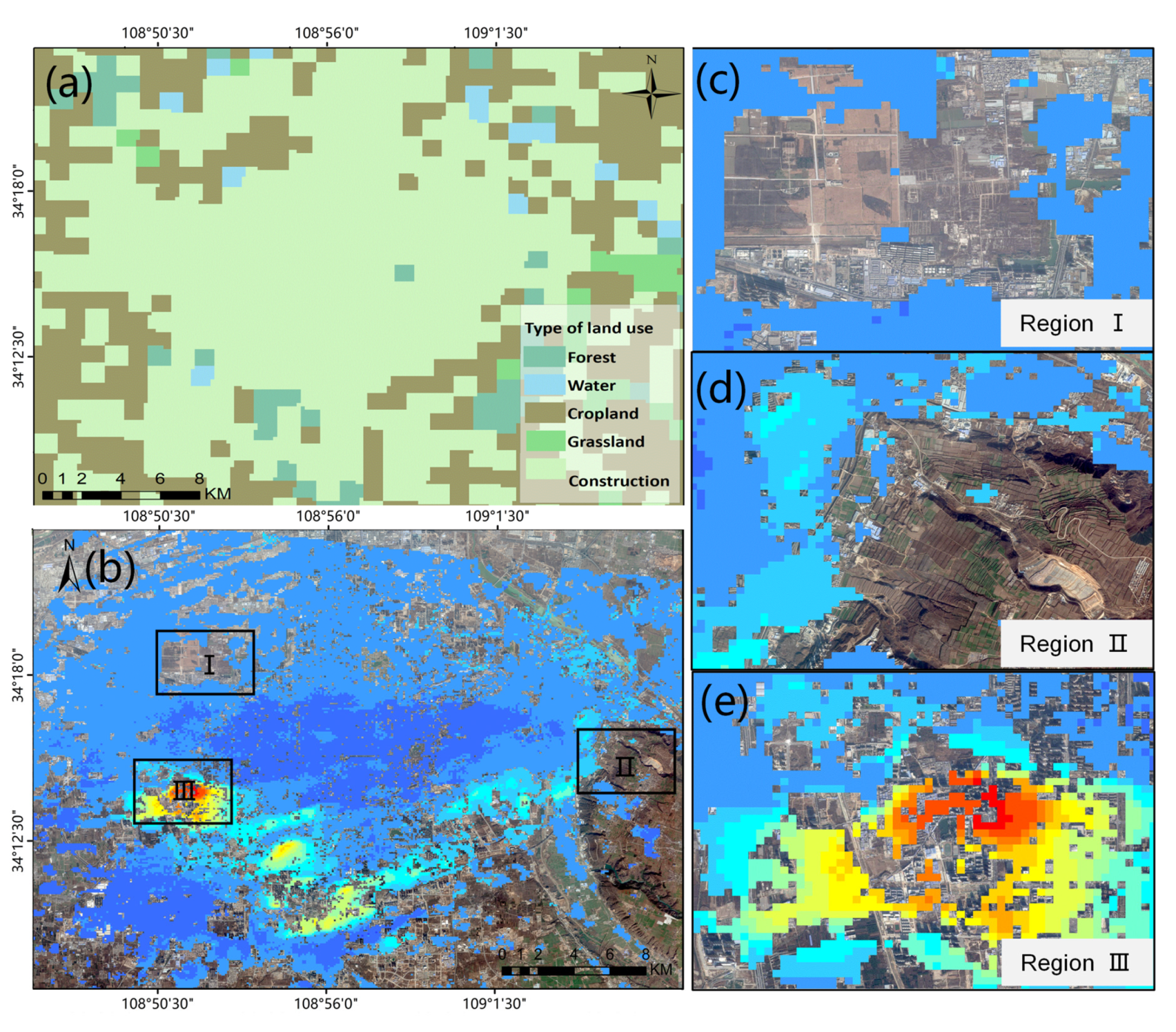
4.1. Ground Deformation Results
4.2. Pre-Processing of Influence Factors
4.3. Ground Deformation Prediction Model
4.4. Application of Ground Deformation Prediction Model
5. Discussion
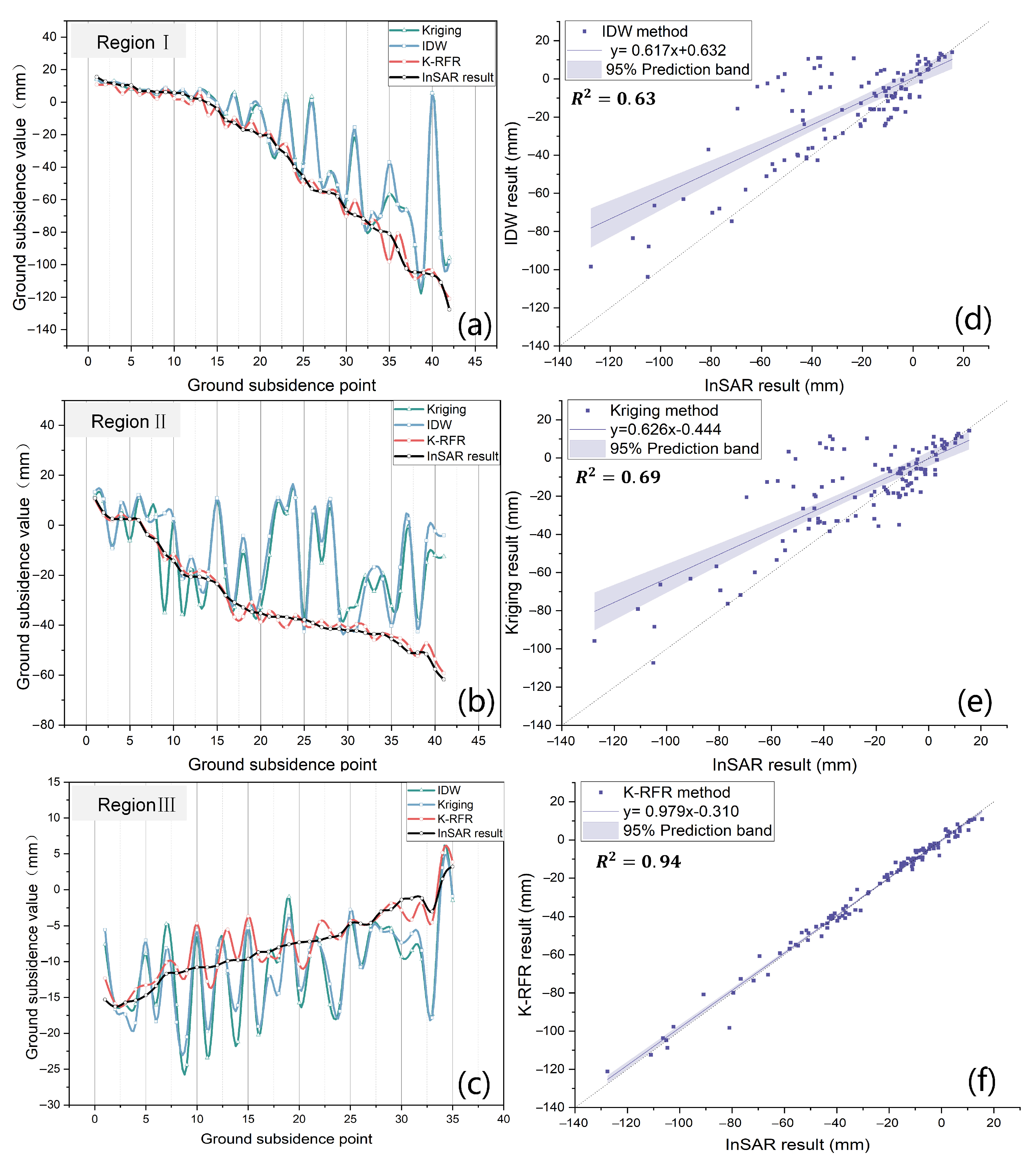
5.1. Comparison of K-RFR Model with Conventional Methods
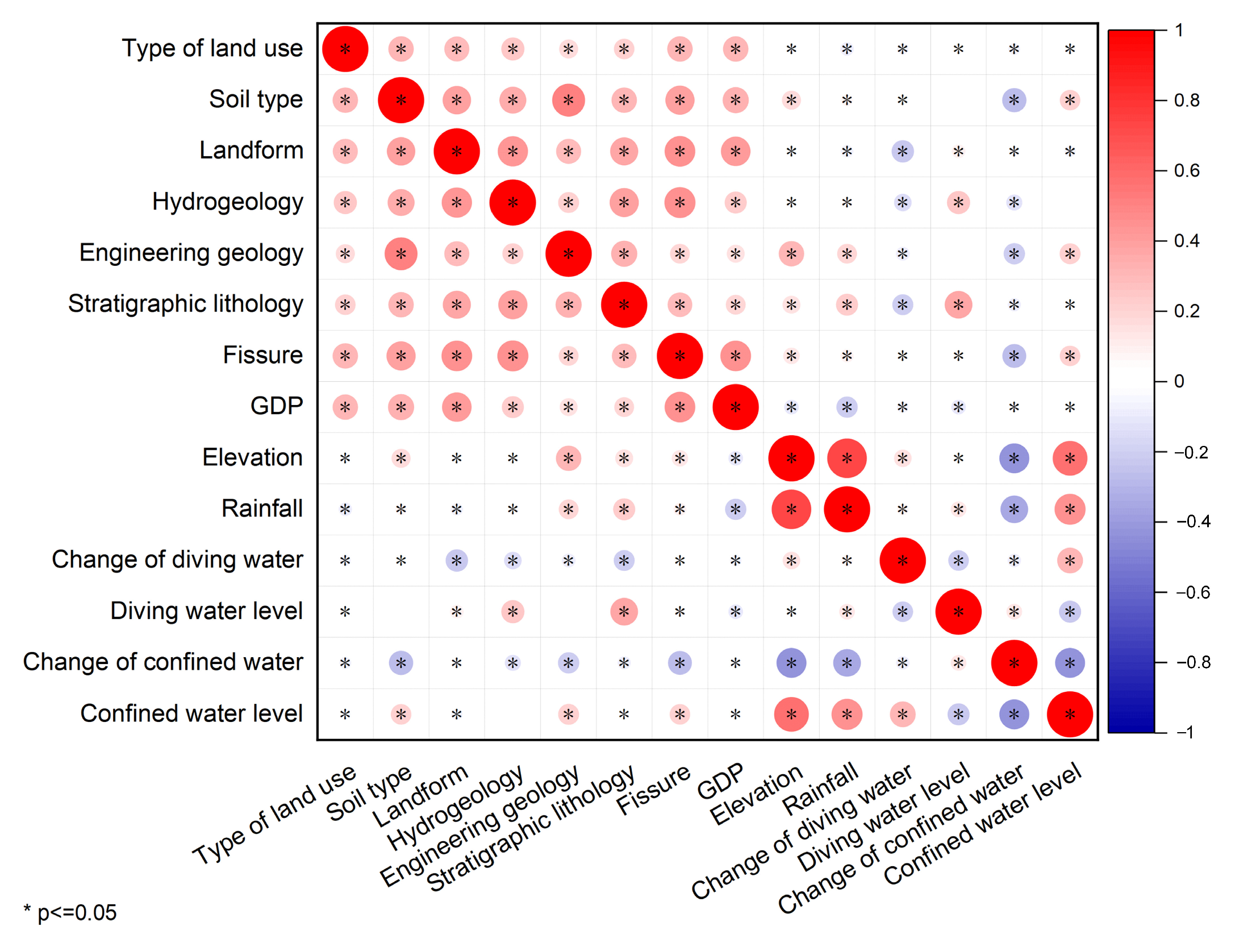
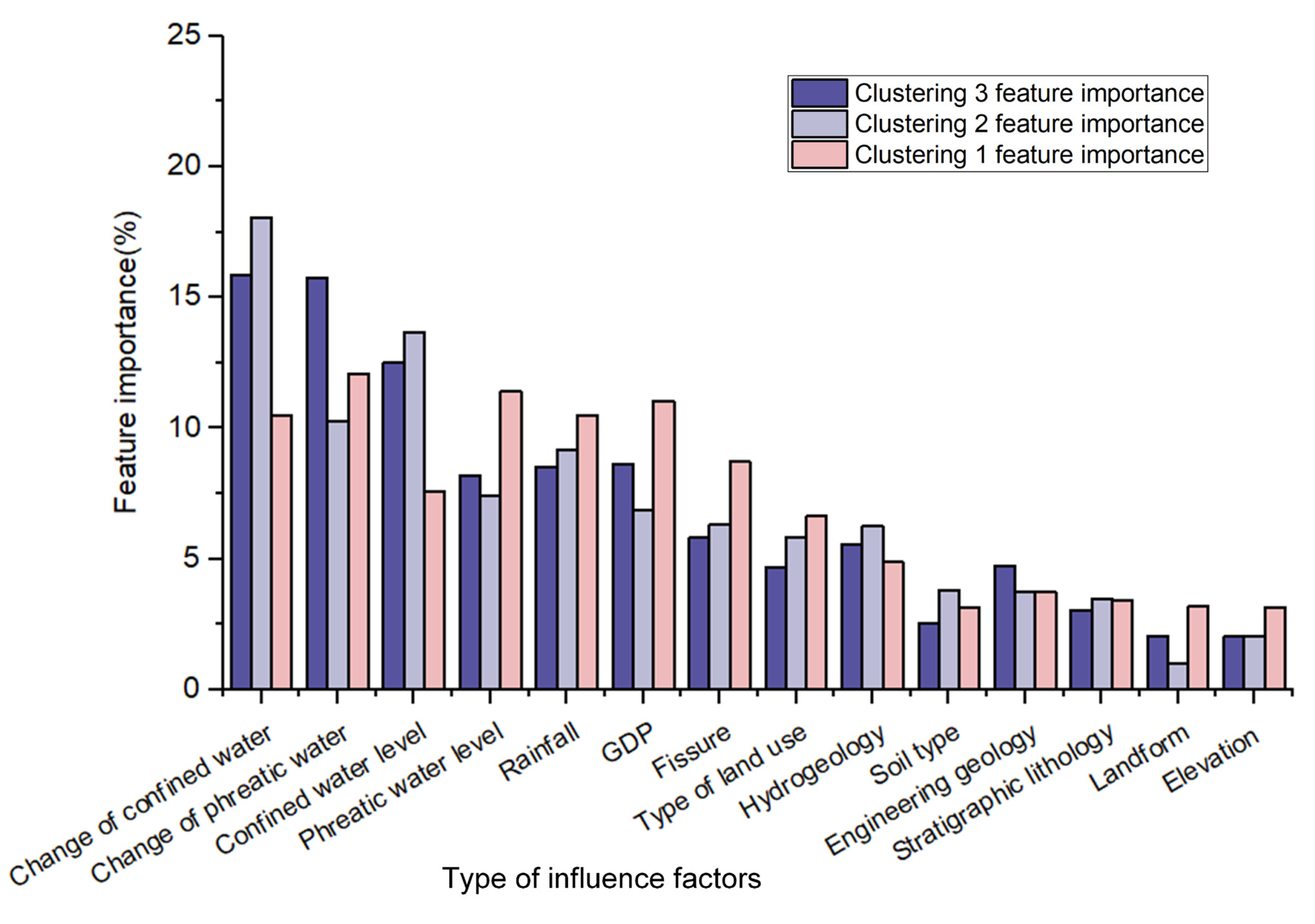
5.2. Analysis of the Importance of Influence Factors
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

References
- Jiang, H.; Balz, T.; Cigna, F.; Tapete, D. Land subsidence in Wuhan revealed using a non-linear PSInSAR approach with long time series of COSMO-SkyMed SAR data. Remote Sens. 2021, 13, 1256. [Google Scholar] [CrossRef]
- Castellazzi, P.; Arroyo-Domínguez, N.; Martel, R.; Calderhead, A.I.; Normand, J.C.; Gárfias, J.; Rivera, A. Land subsidence in major cities of Central Mexico: Interpreting InSAR-derived land subsidence mapping with hydrogeological data. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 102–111. [Google Scholar] [CrossRef]
- Chen, B.; Gong, H.; Li, X.; Lei, K.; Zhu, L.; Gao, M.; Zhou, C. Characterization and causes of land subsidence in Beijing, China. Int. J. Remote Sens. 2017, 38, 808–826. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Jin, M.; Jing, Y.; Liu, Y.; Liu, Y.; Sun, W.; Wei, J.; Chen, Y. Monitoring land subsidence in Wuhan city (China) using the SBAS-InSAR method with radarsat-2 imagery data. Sensors 2019, 19, 743. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Gong, H.; Li, X.; Chen, B.; Zhou, C.; Shi, M.; Guo, L.; Chen, Z.; Ni, Z.; Duan, G. Land subsidence and ground fissures in Beijing capital international airport (bcia): Evidence from quasi-ps insar analysis. Remote Sens. 2019, 11, 1466. [Google Scholar] [CrossRef]
- Duan, L.; Gong, H.; Chen, B.; Zhou, C.; Lei, K.; Gao, M.; Yu, H.; Cao, Q.; Cao, J. An improved multi-sensor MTI time-series fusion method to monitor the subsidence of Beijing subway network during the Past 15 Years. Remote Sens. 2020, 12, 2125. [Google Scholar] [CrossRef]
- Zhou, D.; Zuo, X.; Zhao, Z. Constructing a large-scale urban land subsidence prediction method based on neural network algorithm from the perspective of multiple factors. Remote Sens. 2022, 14, 1803. [Google Scholar] [CrossRef]
- Shen, H.; Cheng, Q.; Zeng, C.; Yang, G.; Li, H.; Zhang, L. Missing information reconstruction of remote sensing data: A technical review. IEEE Geosci. Remote Sens. Mag. 2015, 3, 61–85. [Google Scholar] [CrossRef]
- Liu, Q.; Wei, J.; Wu, H.; Deng, M. HLSTM: Heterogeneous long short-term memory network for large-scale InSAR ground subsidence prediction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8679–8688. [Google Scholar] [CrossRef]
- Deng, M.; Yang, W.; Liu, Q.; Jin, R.; Xu, F.; Zhang, Y. Heterogeneous space–time artificial neural networks for space–time series prediction. Trans. GIS 2018, 22, 183–201. [Google Scholar] [CrossRef]
- Hakim, W.L.; Achmad, A.R.; Lee, C.-W. Land subsidence susceptibility mapping in jakarta using functional and meta-ensemble machine learning algorithm based on time-series InSAR data. Remote Sens. 2020, 12, 3627. [Google Scholar] [CrossRef]
- Rahmati, O.; Golkarian, A.; Biggs, T.; Keesstra, S.; Mohammadi, F.; Daliakopoulos, I.N. Land subsidence hazard modeling: Machine learning to identify predictors and the role of human activities. J. Environ. Manag. 2019, 236, 466–480. [Google Scholar] [CrossRef]
- Sekkeravani, M.A.; Bazrafshan, O.; Pourghasemi, H.R.; Holisaz, A. Spatial modeling of land subsidence using machine learning models and statistical methods. Environ. Sci. Pollut. Res. 2022, 29, 28866–28883. [Google Scholar] [CrossRef] [PubMed]
- Ebrahimy, H.; Feizizadeh, B.; Salmani, S.; Azadi, H. A comparative study of land subsidence susceptibility mapping of Tasuj plane, Iran, using boosted regression tree, random forest and classification and regression tree methods. Environ. Earth Sci. 2020, 79, 1–12. [Google Scholar] [CrossRef]
- Mohammady, M.; Pourghasemi, H.R.; Amiri, M. Land subsidence susceptibility assessment using random forest machine learning algorithm. Environ. Earth Sci. 2019, 78, 503. [Google Scholar] [CrossRef]
- Rahmati, O.; Falah, F.; Naghibi, S.A.; Biggs, T.; Soltani, M.; Deo, R.C.; Cerdà, A.; Mohammadi, F.; Bui, D.T. Land subsidence modelling using tree-based machine learning algorithms. Sci. Total Environ. 2019, 672, 239–252. [Google Scholar] [CrossRef]
- Liu, Z.; Ng, A.H.M.; Wang, H.; Chen, J.; Du, Z.; Ge, L. Land subsidence modeling and assessment in the West Pearl River Delta from combined InSAR time series, land use and geological data. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103228. [Google Scholar] [CrossRef]
- Qu, F.; Zhang, Q.; Lu, Z.; Zhao, C.; Yang, C.; Zhang, J. Land subsidence and ground fissures in Xi’an, China 2005–2012 revealed by multi-band InSAR time-series analysis. Remote Sens. Environ. 2014, 155, 366–376. [Google Scholar] [CrossRef]
- Peng, M.; Zhao, C.; Zhang, Q.; Lu, Z.; Li, Z. Research on spatiotemporal land deformation (2012–2018) over Xi’an, China, with multi-sensor SAR datasets. Remote Sens. 2019, 11, 664. [Google Scholar] [CrossRef]
- Peng, J.; Sun, X.H.; Wang, W.; Sun, G.C. Characteristics of land subsidence, earth fissures and related disaster chain effects with respect to urban hazards in Xi’an, China. Environ. Earth Sci. 2016, 75, 1190. [Google Scholar] [CrossRef]
- Li, Y. Study on the Mechanism of Ground Crack Activity and Effective Influence Distance in Xi’an. Master’s Thesis, Chang’an University, Xi’an, China, 2020. [Google Scholar]
- Li, G.; Zhao, C.; Wang, B.; Peng, M.; Bai, L. Evolution of spatiotemporal ground deformation over 30 years in Xi’an, China, with multi-sensor SAR interferometry. J. Hydrol. 2023, 616, 128764. [Google Scholar] [CrossRef]
- Solari, L.; Ciampalini, A.; Raspini, F.; Bianchini, S.; Moretti, S. PSInSAR Analysis in the Pisa Urban Area (Italy): A Case Study of Subsidence Related to Stratigraphical Factors and Urbanization. Remote Sens. 2016, 8, 120. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; Ding, X.L.; Lu, Z.; Yang, C.S.; Qi, X.M. Monitoring of land subsidence and ground fissures in Xian, China 2005–2006: Mapped by SAR interferometry. Environ. Geol. 2009, 58, 1533–1540. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Li, W.; Hai, X.; Hang, F.; Wu, X.; Yin, K.; Chang, Z. Uncertainty in Landslide Vulnerability Modeling with Different Environmental Factor Linkages and Predictive Models. Earth Sci. Res. J. 2021, 46, 3777–3795. [Google Scholar]
- Pradhan, B.; Lee, S. Landslide susceptibility assessment and factor effect analysis: Backpropagation artificial neural networks and their comparison with frequency ratio and bivariate logistic regression modelling. Environ. Model. Softw. 2010, 25, 747–759. [Google Scholar] [CrossRef]
- Shi, Y.; Shi, D.; Cao, X. Impacting factors and temporal and spatial differentiation of land subsidence in Shanghai. Sustainability 2018, 10, 3146. [Google Scholar] [CrossRef]
- Chen, B.; Gong, H.; Li, X.; Lei, K.; Ke, Y.; Duan, G.; Zhou, C. Spatial correlation between land subsidence and urbanization in Beijing, China. Nat. Hazards 2015, 75, 2637–2652. [Google Scholar] [CrossRef]
- Li, F.; Gong, H.; Chen, B.; Zhou, C.; Guo, L. Analysis of the contribution rate of the influencing factors to land subsidence in the Eastern Beijing plain, China based on extremely randomized trees (ERT) method. Remote Sens. 2020, 12, 2963. [Google Scholar] [CrossRef]
- Taravatrooy, N.; Nikoo, M.R.; Sadegh, M.; Parvinnia, M. A hybrid clustering-fusion methodology for land subsidence estimation. Nat. Hazards 2018, 94, 905–926. [Google Scholar] [CrossRef]
- Xue, L.; Wang, J. Improved k-means algorithm based on optimizing initial cluster centers and its application. Int. J. Adv. Netw. Monit. Control. 2017, 2, 9–16. [Google Scholar]
- James, M. Some methods for classification and analysis of multivariate observations. In Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability; University of California Press; Oakland, CA, USA, 1967. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Influence Factors | Format | Resolution | Data Sources | Duration | |
|---|---|---|---|---|---|
| Ground subsidence | Raster | 3 m × 3 m | InSAR results | 2012–2015 | |
| Ground fissure | Vector | — | Map data | 2012 | |
| Stratigraphic lithology | Raster | 100 m × 100 m | Map data | 2012 | |
| Engineering geology | Raster | 100 m × 100 m | Map data | 2012 | |
| Landform | Raster | 100 m × 100 m | Map data | 2012 | |
| DEM | Raster | 30 × 30 m | NASA | 2015 | |
| Hydrogeology | Deep confined water | Raster | 100 m × 100 m | Map data | 2012 |
| Shallow confined water | 100 m × 100 m | ||||
| Phreatic water | 100 m × 100 m | ||||
| Groundwater | Confined water level | Vector | — | Geological Environment Monitoring Station | 2012–2015 |
| Phreatic water level | — | ||||
| Rainfall | Raster | 1 km × 1 km | Goddard Earth Sciences Data and Information Services Center | 2012–2015 | |
| Land use | Raster | 1 km × 1 km | Institute of Geographic Sciences and Natural Resources Research, Chinese Academy of Sciences | 2015 | |
| Soil | Raster | 1 km × 1 km | Institute of Geographic Sciences and Natural Resources Research, Chinese Academy of Sciences | 1995 | |
| GDP | Raster | 1 km × 1 km | Institute of Geographic Sciences and Natural Resources Research, Chinese Academy of Sciences | 2015 | |
| Evaluation Item | Correlation Degree | Evaluation Item | Correlation Degree |
|---|---|---|---|
| Change of phreatic water | 0.822 | Type of land use | 0.845 |
| Phreatic water level | 0.829 | Rainfall | 0.845 |
| Ground fissure | 0.839 | Elevation | 0.846 |
| Engineering geology | 0.839 | Landform | 0.846 |
| Hydrogeology | 0.841 | Soil type | 0.856 |
| GDP | 0.842 | Stratigraphic lithology | 0.858 |
| Confined water level | 0.842 | Change of confined water | 0.862 |
| Clustering Categories | Frequency | Percentage/% |
|---|---|---|
| Cluster 1 | 67,565 | 74.8 |
| Cluster 2 | 3984 | 4.5 |
| Cluster 3 | 18,755 | 20.7 |
| Total | 90,304 | 100.0 |
| Total Sample Size | Number of Trees | Depth of Tree | RMSE /mm | MAE /mm | R2 | OOB_SCORE | |
|---|---|---|---|---|---|---|---|
| Unclustered | 47,810 | 100 | 50 | 4.6 | 3.4 | 0.86 | 0.84 |
| Cluster 1 | 30,610 | 100 | 50 | 2.9 | 2.5 | 0.89 | 0.87 |
| Cluster 2 | 3476 | 50 | 20 | 2.3 | 1.0 | 0.95 | 0.91 |
| Cluster 3 | 13,724 | 100 | 30 | 3.9 | 2.8 | 0.93 | 0.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Zhao, C.; Li, G.; Peng, M.; Zhang, Q. A Multifactor-Based Random Forest Regression Model to Reconstruct a Continuous Deformation Map in Xi’an, China. Remote Sens. 2023, 15, 4795. https://doi.org/10.3390/rs15194795
Guo X, Zhao C, Li G, Peng M, Zhang Q. A Multifactor-Based Random Forest Regression Model to Reconstruct a Continuous Deformation Map in Xi’an, China. Remote Sensing. 2023; 15(19):4795. https://doi.org/10.3390/rs15194795
Chicago/Turabian StyleGuo, Xinxin, Chaoying Zhao, Guangrong Li, Mimi Peng, and Qin Zhang. 2023. "A Multifactor-Based Random Forest Regression Model to Reconstruct a Continuous Deformation Map in Xi’an, China" Remote Sensing 15, no. 19: 4795. https://doi.org/10.3390/rs15194795
APA StyleGuo, X., Zhao, C., Li, G., Peng, M., & Zhang, Q. (2023). A Multifactor-Based Random Forest Regression Model to Reconstruct a Continuous Deformation Map in Xi’an, China. Remote Sensing, 15(19), 4795. https://doi.org/10.3390/rs15194795