
PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation



Abstract
:1. Introduction
2. Mathematical Model of PPP-RTK with SSR Corrections
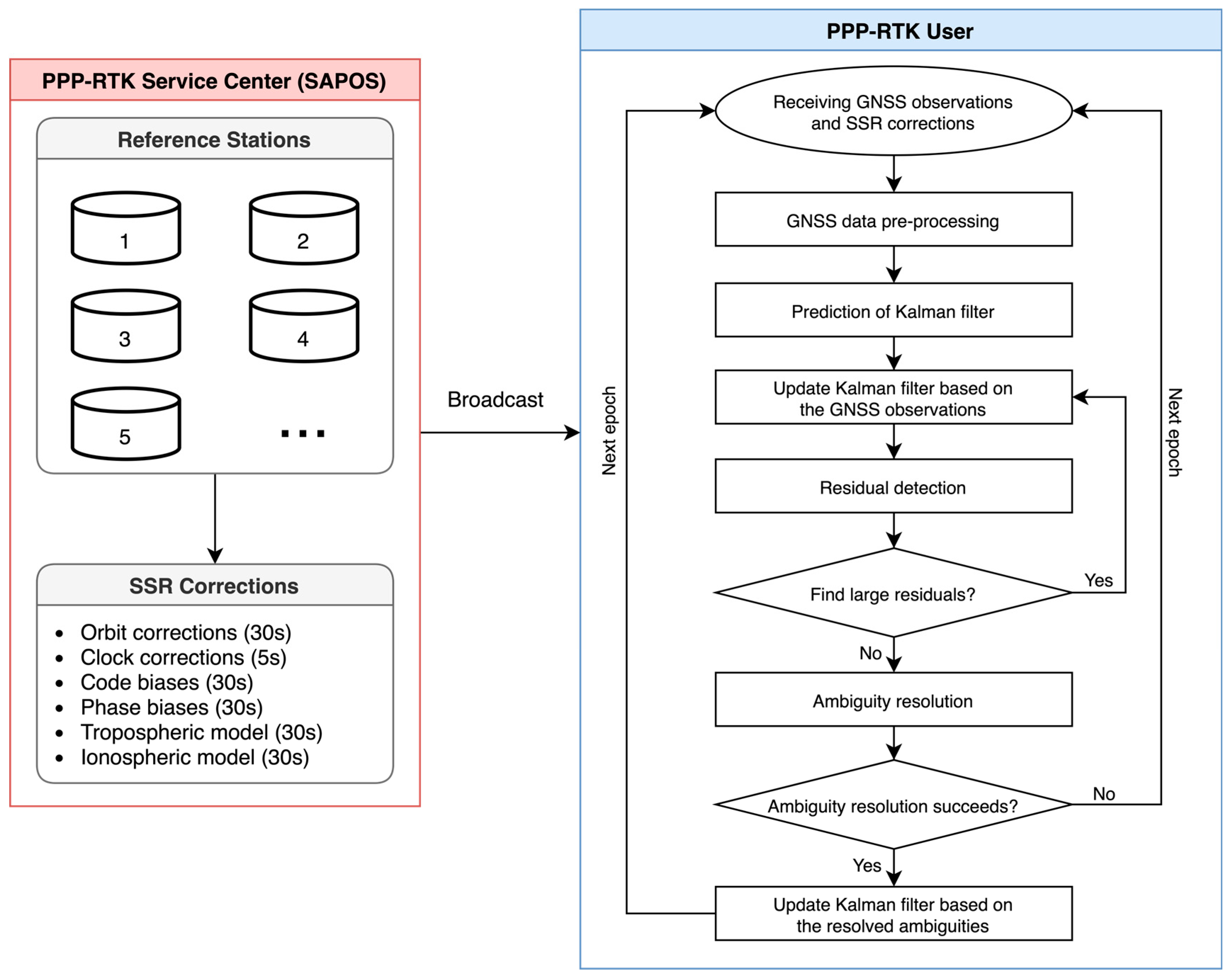
2.1. Workflow
- (1)
- Receive GNSS observations and decode SSR corrections in real-time; calculate the SSR tropospheric and ionospheric delays for each satellite based on the approximate position of the receiver;
- (2)
- GNSS data pre-processing, which mainly removes some potential large errors and detects the cycle slips by using TurboEdit algorithm [31];
- (3)
- Prediction of Kalman filter based on Section 2.3;
- (4)
- Update of Kalman filter based on Section 2.4, obtain the PPP-RTK solutions without AR;
- (5)
- Detect large residuals; if the residual of one satellite is larger than 5 m for code measurements and 0.05 m for phase measurements, or the residual is larger than 3 times of standard deviation of all satellites’ residuals, the satellite will be excluded from the data processing at current epoch. Then, go back to Step (4) and reupdate the state vector of Kalman filter; if there are no large residuals, then go forward to the next step;
- (6)
- Extract the float ambiguity estimates and their variance-covariance matrix; construct the double-differenced ambiguities between two satellites and two frequency bands to recover the integer feature of the ambiguities, and then resolve the ambiguities to integers; if AR fails, then derive the solutions without AR and proceed to the next epoch, otherwise continue the next step.
- (7)
- Update the solution of the Kalman filter based on the resolved ambiguities and derive the solutions with AR; finish this epoch and proceed to the next epoch.
2.2. GNSS Observation Equations
2.3. Prediction of Kalman Filter
2.4. Update of Kalman Filter
2.5. Ambiguity Resolution
2.6. Solution with AR
3. PPP-RTK Performances in a Static Scenario
3.1. Data Collection and Processing Strategies
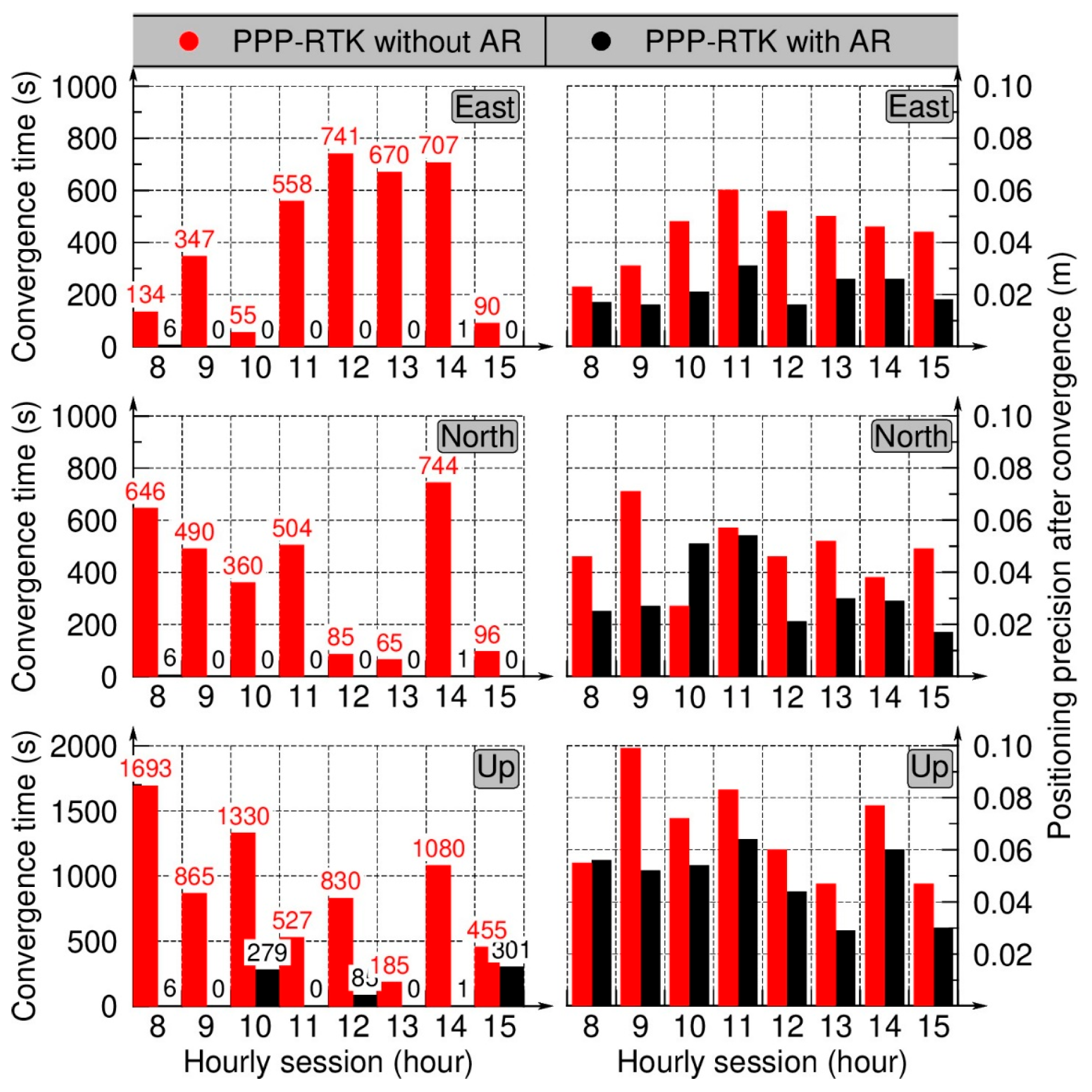
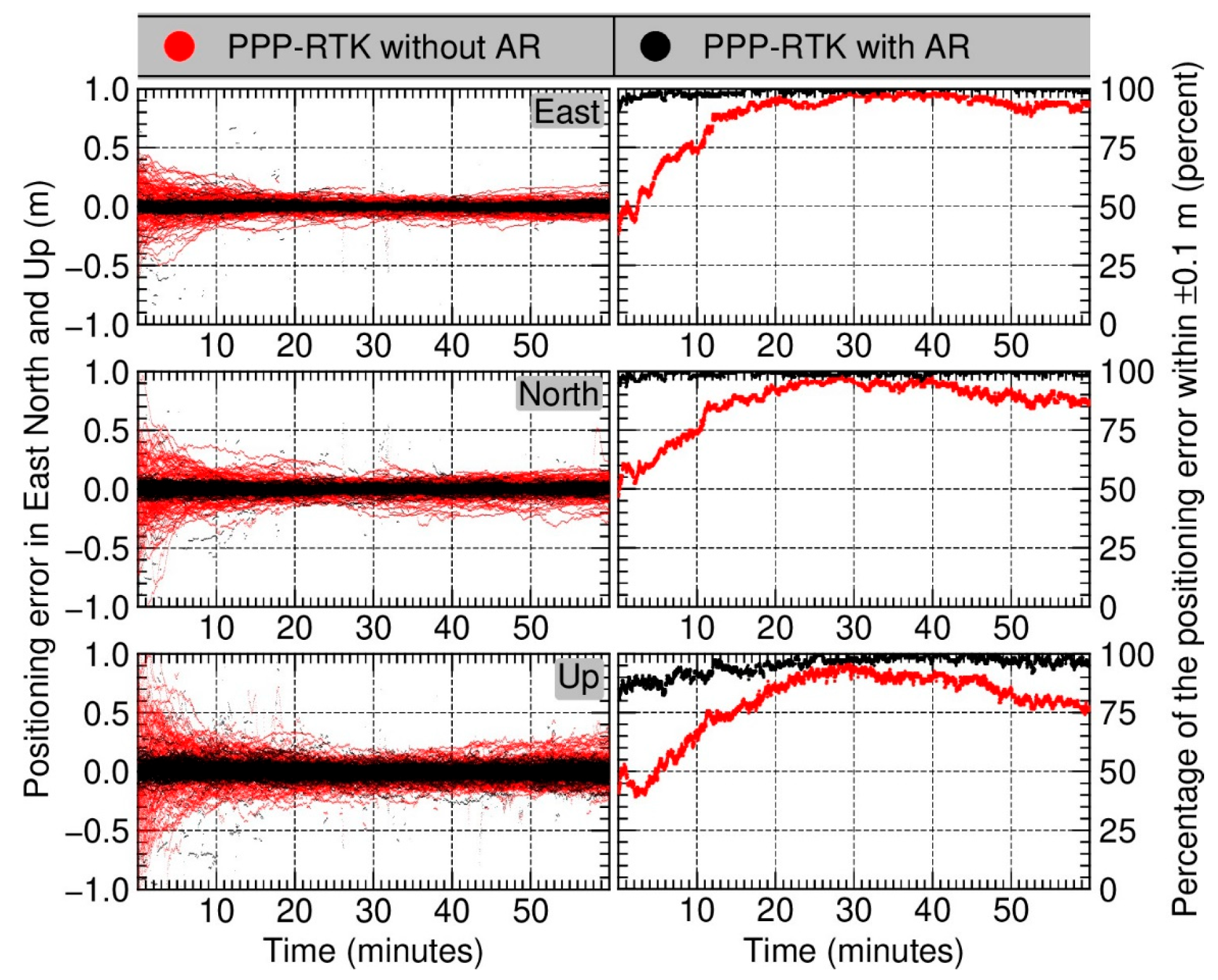
3.2. Positioning Precision and Convergence Time
4. Real-Time PPP-RTK Applications for Vehicle Transportation
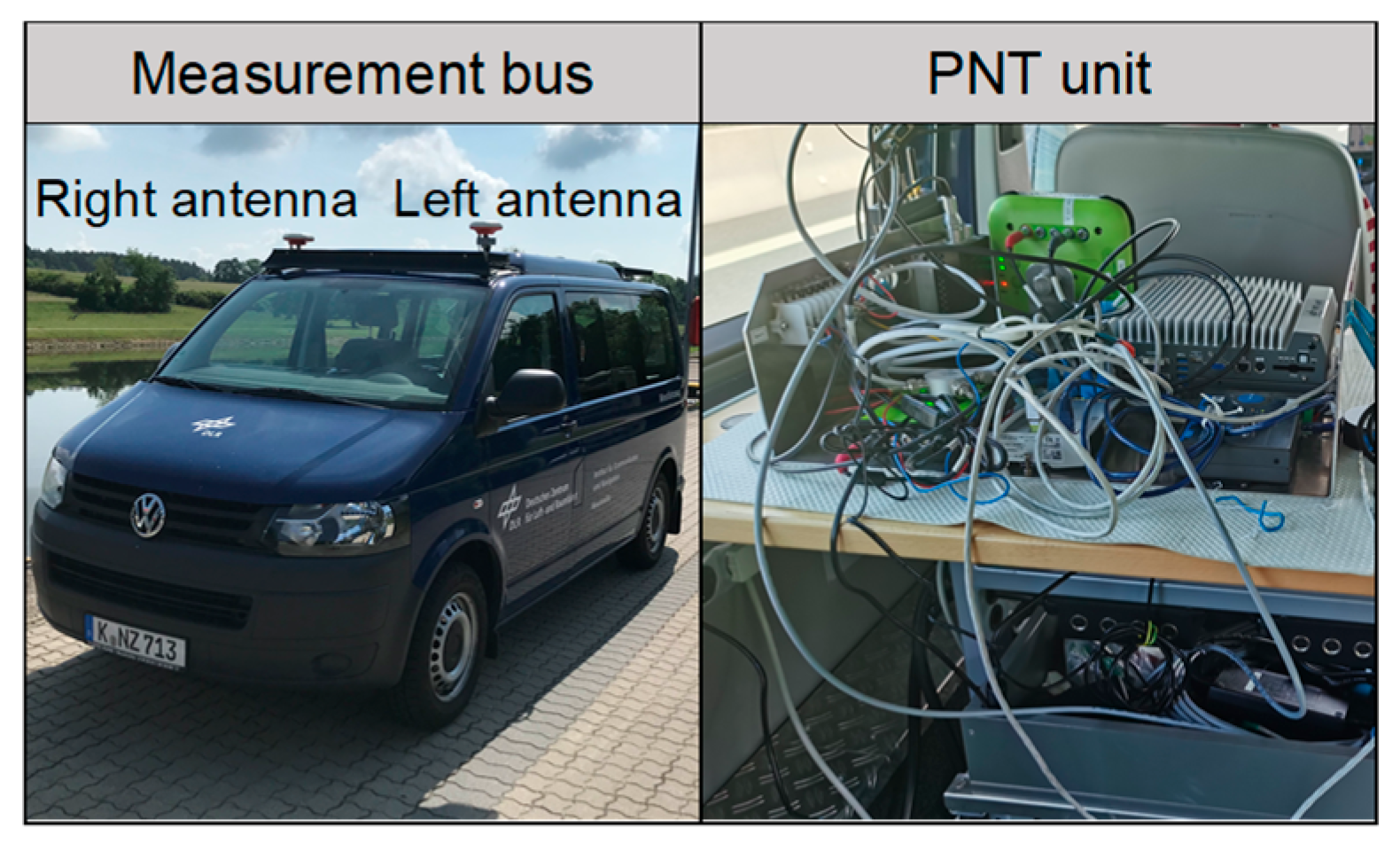
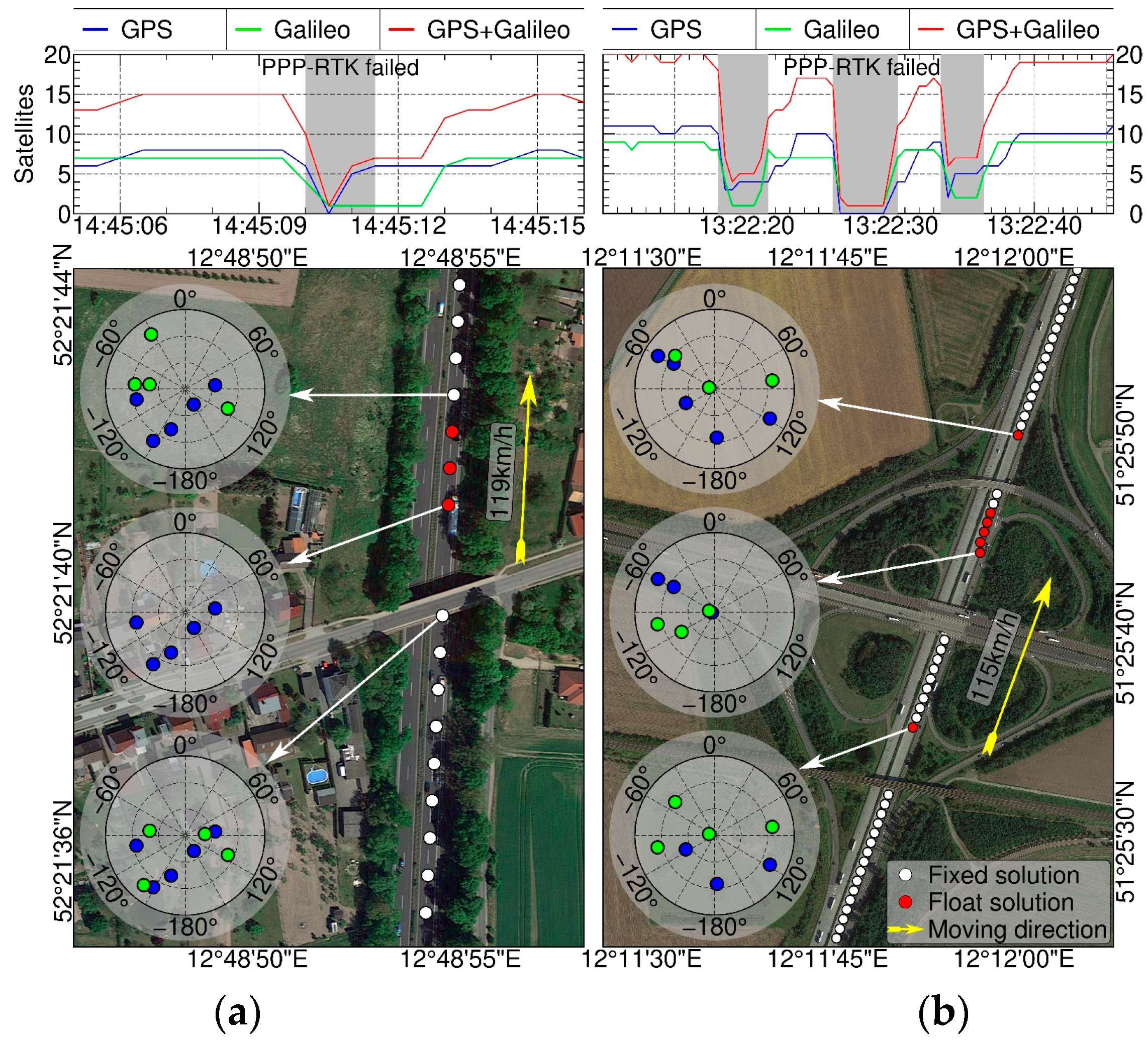
4.1. Measurement Campaign
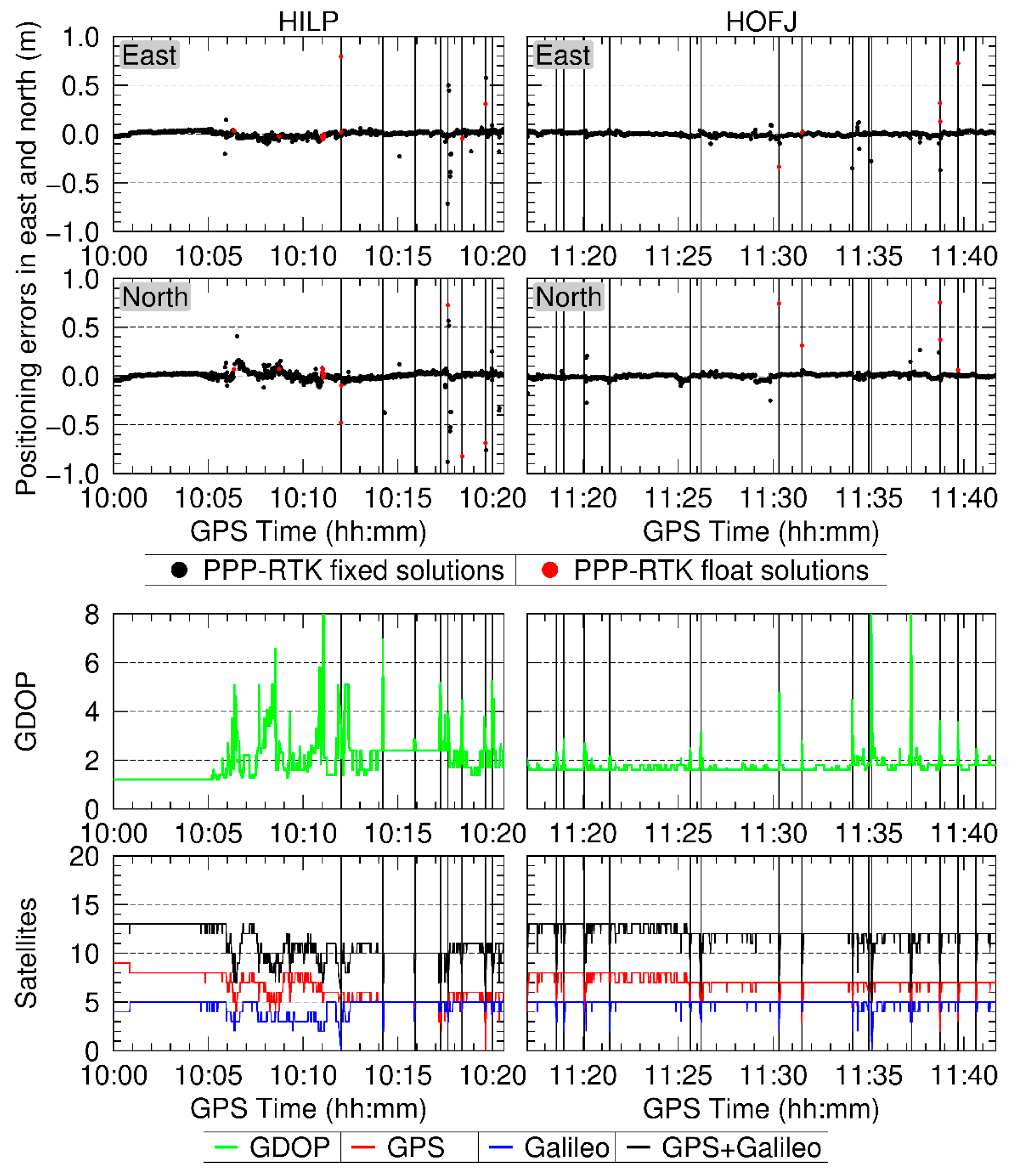
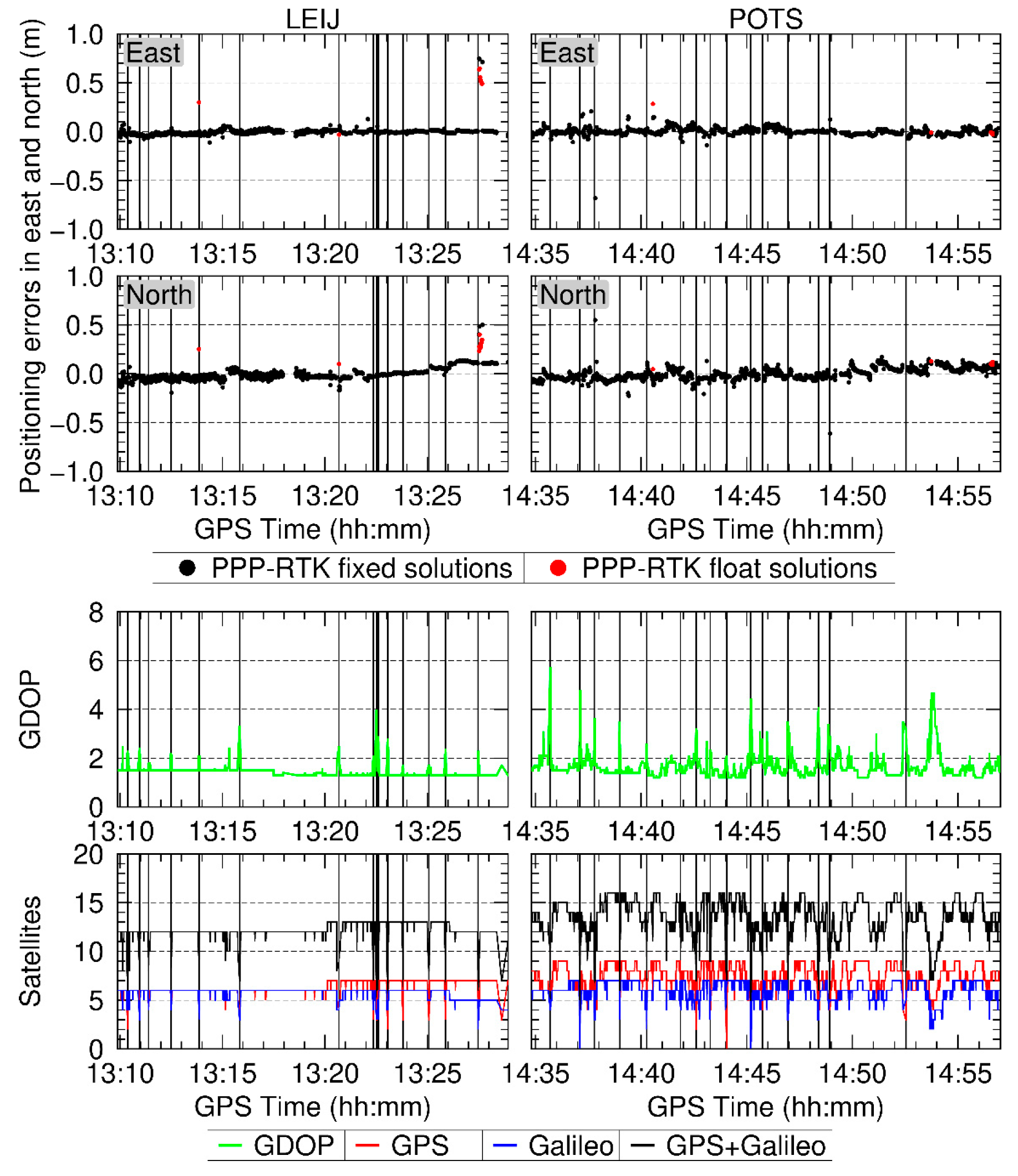
4.2. Positioning Precision
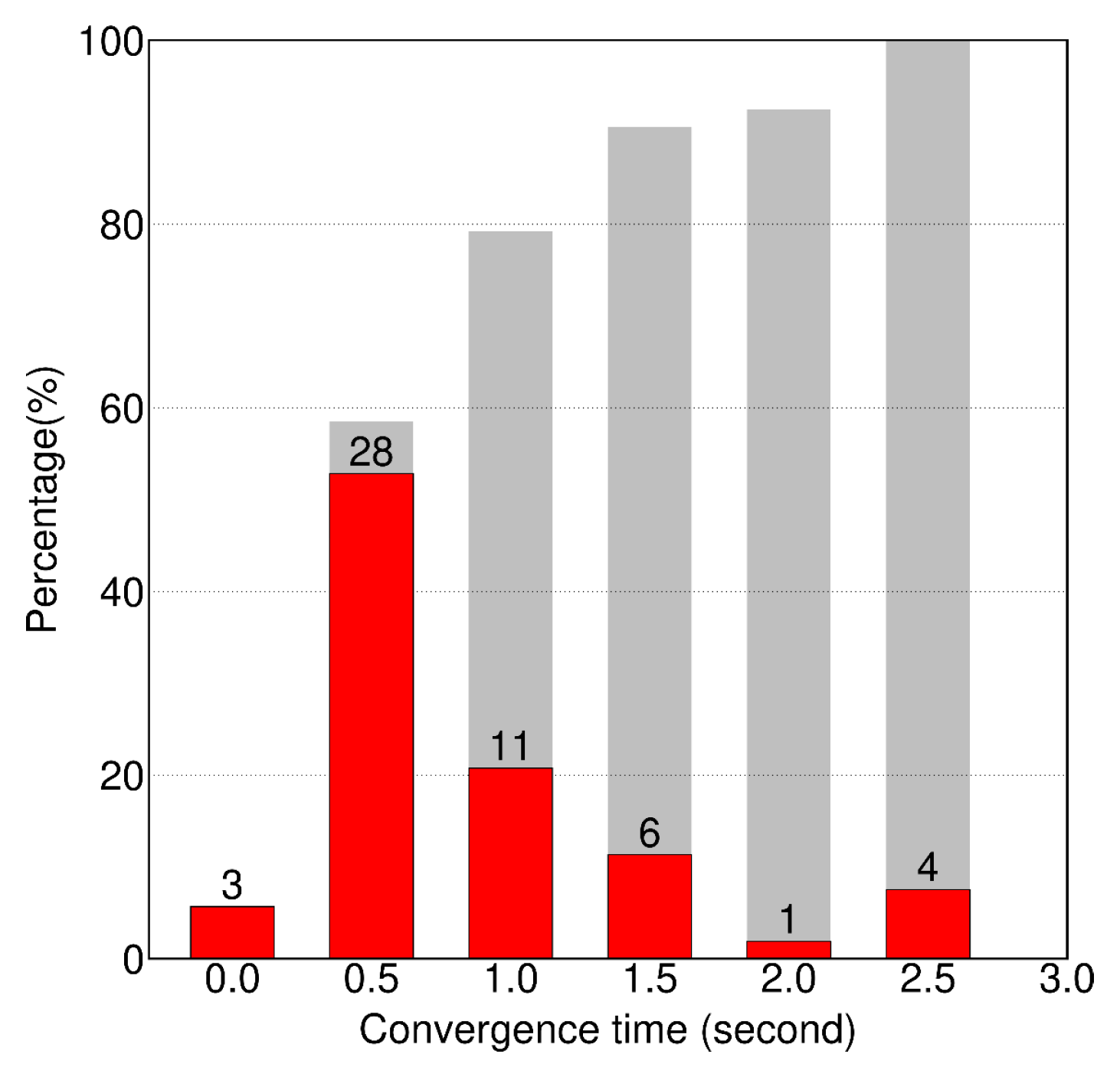
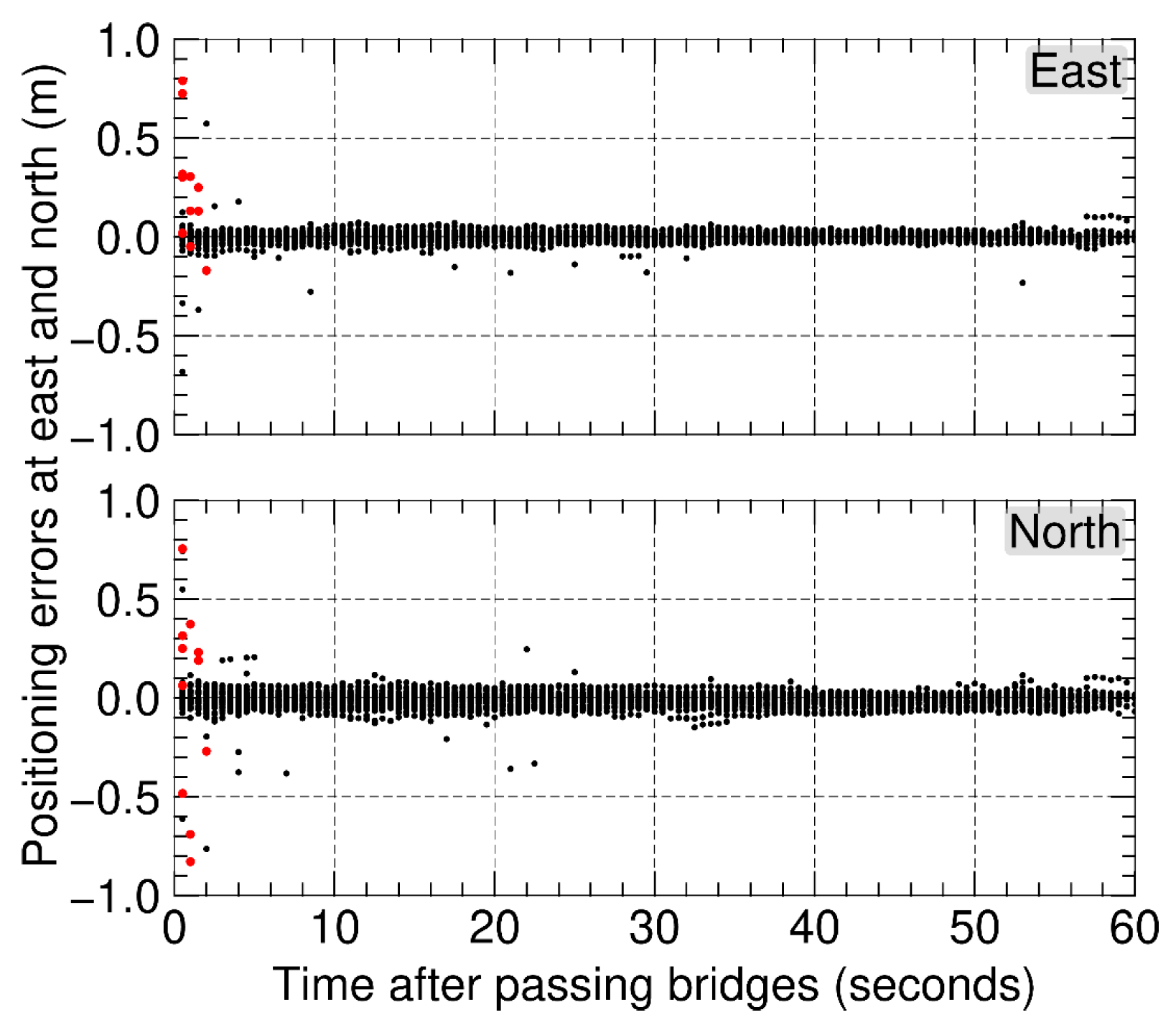
4.3. Convergence Time
5. Conclusions and Outlooks
- Continuity: GNSS provides continuous positioning information in an open area but faces challenges in confined scenarios under bridges and in urban areas. Close-range sensors, such as LiDAR/RADAR, work perfectly in these confined scenarios, but faces challenges in an open area where no clear boundaries of infrastructures are visible. In addition, IMU is an independent sensor which provides precise navigation information within a short time when GNSS is unavailable. Therefore, the complementary use of GNSS, close-range sensors and IMU will definitely enhance the capability of continuous navigation in harsh environments.
- Reliability: GNSS signals are susceptible to interference in harsh environments. On one hand, limited by satellite visibility, the PPP-RTK solutions are unreliable. Thus, multi-constellation GNSS PPP-RTK is necessary. On the other hand, multipath signals are unavoidable and affect the reliability of the PPP-RTK. Overcoming multipath effects in harsh environments still needs further research.
- Integrity: real-time PPP-RTK applied for autonomous driving is a safety and liability critical application. Thus, the rigorous integrity concept of the GNSS PPP-RTK is definitely required. But the integrity monitoring algorithms developed in the aviation domain cannot be transported directly into autonomous driving applications. The modified integrity monitoring algorithm for GNSS PPP-RTK needs to be investigated.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Report on Road User Needs and Requirements: Outcome of the EUSPA User Consultation Platform Issue/Rev: 3.0. 2021. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Report_on_User_Needs_and_Requirements_Road.pdf (accessed on 1 September 2021).
- Malys, S.; Jensen, P.A. Geodetic Point Positioning with GPS Carrier Beat Phase Data from the CASA UNO Experiment. Geophys. Res. Lett. 1990, 17, 651–654. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Odolinski, R.; Odijk, D. Instantaneous BeiDou+ GPS RTK positioning with high cut-off elevation angles. J. Geod. 2014, 88, 335–350. [Google Scholar] [CrossRef]
- Xi, R.; Jiang, W.; Meng, X.; Chen, H.; Chen, Q. Bridge monitoring using BDS-RTK and GPS-RTK techniques. Measurement 2018, 120, 128–139. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, K. Performance analysis of precise point positioning using real-time orbit and clock products. J. Glob. Position. Syst. 2004, 3, 95–100. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- An, X.; Meng, X.; Jiang, W. Multi-constellation GNSS precise point positioning with multi-frequency raw observations and dual-frequency observations of ionospheric-free linear combination. Satell. Navig. 2020, 1, 7. [Google Scholar] [CrossRef]
- Wübbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise point positioning using state-space representation in RTK networks. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Wübbena, G.; Perschke, C.; Wübbena, J.; Wübbena, T.; Schmitz, M. GNSS SSR real-time correction: The Geo++ SSRZ format and applications. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Virtual, 21–25 September 2020. [Google Scholar] [CrossRef]
- Mervart, L.; Lukes, Z.; Rocken, C.; Iwabuchi, T. Precise point positioning with ambiguity resolution in real-time. In Proceedings of the ION GNSS, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Teunissen, P.J.G.; Odijk, D.; Zhang, B. PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. 2010, 42, 223–229. [Google Scholar]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- de Jonge, P.J. A Processing Strategy for the Application of the GPS in Networks. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1998. [Google Scholar]
- Laurichesse, D.; Mercier, F.; Berthias, J.; Broca, P.; Cerri, L. Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Collins, P.; Lahaye, F.; Herous, P.; Bisnath, S. Precise point positioning with ambiguity resolution using the decoupled clock model. In Proceedings of the ION GNSS 2008, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.; Bijac, J.; Cerri, L. Real time zero-difference ambiguities blocking and absolute RTK. In Proceedings of the ION NTM-2008, San Diego, CA, USA, 28–30 January 2008. [Google Scholar]
- Geng, J.; Guo, J.; Meng, X.; Gao, K. Speeding up PPP ambiguity resolution using triple-frequency GPS/BeiDou/Galileo/QZSS data. J. Geod. 2020, 94, 6. [Google Scholar] [CrossRef]
- Nadarajah, N.; Khodabandeh, A.; Wang, K.; Choudhury, M.; Teunissen, P.J.G. Multi-GNSS PPP-RTK: From large-to small-scale networks. Sensors 2018, 18, 1078. [Google Scholar] [CrossRef]
- Geng, J.; Guo, J.; Chang, H.; Li, X. Towards global instantaneous decimeter-level positioning using tightly-coupled multi-constellation and multi-frequency GNSS. J. Geod. 2018, 93, 977–991. [Google Scholar] [CrossRef]
- Li, P.; Jiang, X.; Zhang, X.; Ge, M.; Schuh, H. GPS + Galileo + BeiDou precise point positioning with triple-frequency ambiguity resolution. GPS Solut. 2020, 24, 78. [Google Scholar] [CrossRef]
- Banville, S.; Collins, P.; Zhang, W.; Langley, R.B. Global and regional ionospheric corrections for faster PPP convergence. Navigation 2014, 61, 115–124. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S.; Liu, X.; Memarzadeh, Y.; Visser, H. Assessment of ionospheric corrections for PPP–RTK using regional ionosphere modelling. Meas. Sci. Technol. 2018, 30, 014001. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, X. Assessment of the performance of GPS/Galileo PPP-RTK convergence using ionospheric corrections from networks with different scales. Earth Planets Space 2022, 74, 47. [Google Scholar] [CrossRef]
- Psychas, D.; Teunissen, P.J.G.; Verhagen, S. A Multi-Frequency Galileo PPP-RTK Convergence Analysis with an Emphasis on the Role of Frequency Spacing. Remote Sens. 2021, 13, 3077. [Google Scholar] [CrossRef]
- Geng, J.; Teferle, F.N.; Meng, X.; Dodson, A.H. Towards PPP-RTK: Ambiguity resolution in real-time precise point positioning. Adv. Space Res. 2011, 47, 1664–1673. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Guo, F. Predicting atmospheric delays for rapid ambiguity resolution in precise point positioning. Adv. Space Res. 2014, 54, 840–850. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Wang, F.; Geng, J. GNSS PPP-RTK tightly coupled with low-cost visual-inertial odometry aiming at urban canyons. J. Geod. 2023, 97, 66. [Google Scholar] [CrossRef]
- Böhm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Banville, S.; Tang, H. Antenna rotation and its effects on kinematic Precise point positioning. In Proceedings of the ION GNSS 2010, Institute of Navigation, Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Li, M.; Yuan, Y.; Wang, N.; Liu, T.; Chen, Y. Estimation and analysis of the short-term variations of multi-GNSS receiver differential code biases using global ionosphere maps. J. Geod. 2018, 92, 889–903. [Google Scholar] [CrossRef]
- Chang, X.W.; Yang, X.; Zhou, T. MLAMBDA: A modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Gewies, S.; Becker, C.; Noack, T. Deterministic framework for parallel real-time processing in GNSS applications. In Proceedings of the 2012 6th ESA Workshop on Satellite Navigation Technologies (Navitec 2012) & European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012. [Google Scholar] [CrossRef]
- An, X.; Meng, X.; Jiang, W.; Chen, H.; He, Q.; Xi, R. Global ionosphere estimation based on data fusion from multisource: Multi-GNSS, IRI model, and satellite altimetry. J. Geophys. Res. Space Phys. 2019, 124, 6012–6028. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Seogwipo-si, Republic of Korea, 4–6 November 2009. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | PPP-RTK Processing Strategies |
|---|---|
| Processing mode | Kinematic mode in real-time |
| GNSS and frequency band | GPS L1 + L2 and Galileo E1 + E5a code and phase measurements |
| Observation noise | 0.6 m for code measurements and 0.01 cycles for carrier-phase measurements; 0.01 m for SSR tropospheric corrections and 0.05 m for ionospheric corrections |
| Weighting strategy | Equal weight factor for GPS and Galileo measurements and weight factor is defined as: |
| Elevation mask | 15° |
| Ambiguities | Resolved by full and partial MLAMBDA algorithm epoch by epoch and set fix failure rate as 1% |
| Satellite orbit, clock and biases | Real-time SSR corrections: (1) satellite orbit, clock and signal bias corrections updated every 30 s; (2) high-rate clock correction with an updating interval of 5 s |
| Atmospheric delay | Corrected with SSR corrections and estimated with other parameters |
| Item | RTK Processing Strategies |
|---|---|
| Processing mode | Kinematic mode in post-processing |
| GNSS and frequency band | GPS L1 + L2 and Galileo E1 + E5a code and phase measurements |
| Observation noise | The ratio between code and carrier-phase measurements is 100 |
| Weighting strategy | Elevation dependent:, where , |
| Elevation mask | 15° |
| Ambiguities | Use LAMBDA resolving the ambiguities with a ratio test of 2.0 |
| Satellite orbit, clock, biases | Final orbit and clock products from CODE, the signal biases are eliminated in double differenced observations |
| Atmospheric delay | Significantly reduced and ignored in double differenced observations |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, X.; Ziebold, R.; Lass, C. PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation. Remote Sens. 2023, 15, 4770. https://doi.org/10.3390/rs15194770
An X, Ziebold R, Lass C. PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation. Remote Sensing. 2023; 15(19):4770. https://doi.org/10.3390/rs15194770
Chicago/Turabian StyleAn, Xiangdong, Ralf Ziebold, and Christoph Lass. 2023. "PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation" Remote Sensing 15, no. 19: 4770. https://doi.org/10.3390/rs15194770
APA StyleAn, X., Ziebold, R., & Lass, C. (2023). PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation. Remote Sensing, 15(19), 4770. https://doi.org/10.3390/rs15194770