

On-Earth Observation of Low Earth Orbit Targets through Phase Disturbances by Atmospheric Turbulence



Abstract
:
1. Introduction
- LEO targets are fast-moving, which means that the imaging process can only be performed in a short time with several consecutive frames captured. The received photons may not be sufficient for generating high-quality images. In contrast, observations of stationary stars often involve long exposure times [7]. Additionally, the motion-induced blurring of LEO object images needs to be filtered out.
- In the realm of astronomical observations, the traditional approach hinges on stars as the primary sources of light, with cameras adeptly accumulating substantial energy over the long exposure time. Stars, by their nature, commonly serve as Natural Guide Stars (NGS) for AO systems, providing the essential input for the wavefront sensor [4]. In contrast, fast-moving objects at LEO typically adopt a passive stance, devoid of any intrinsic light emission. These objects come into view only when they catch and reflect sunlight back toward the Earth observer, offering limited observation opportunities within specific time windows.
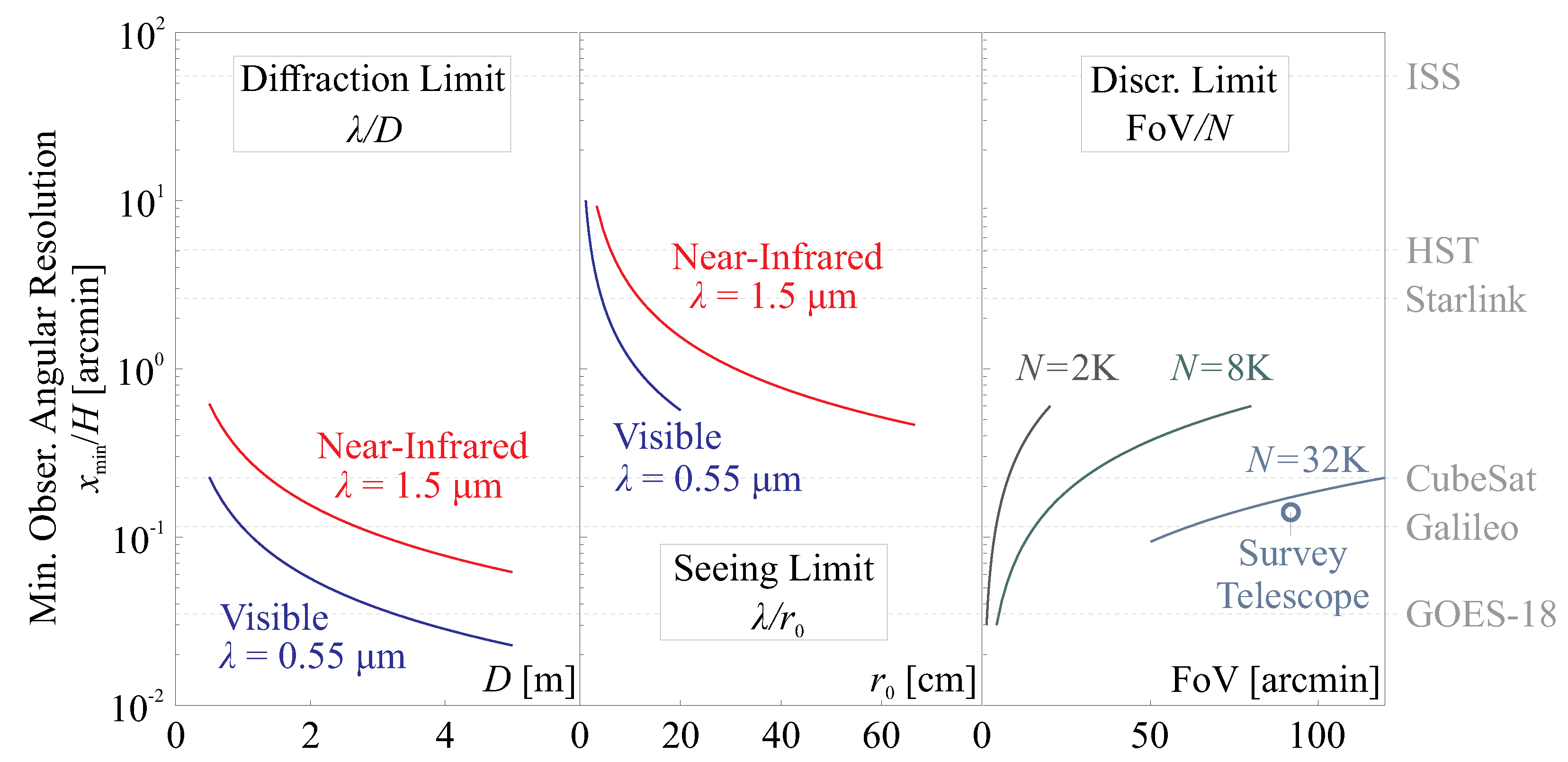
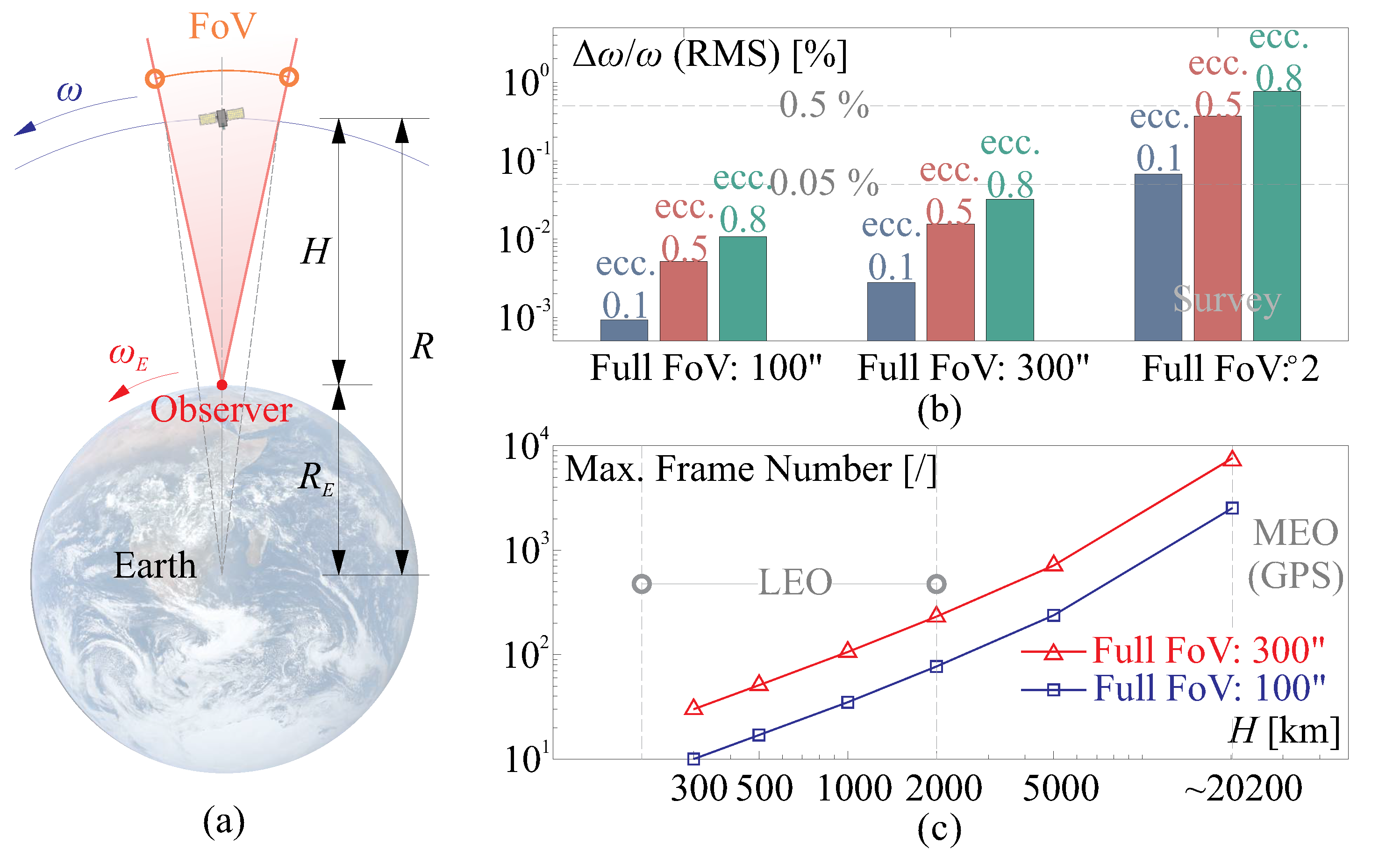
- Stationary stars or planets remain almost unchanged in the camera view if the motion of the Earth’s rotation is compensated during night observation. The observed region in the night sky is often narrow, allowing the telescope to be pointed to a specific direction for an extended period. Moreover, the targets typically occupy a large field within the observation area. However, monitoring LEO objects is entirely different; these LEO moving objects are usually tiny in the FoV. For instance, a 10 m satellite at an orbital height of km has an angular view of only 2.6 arcsec, while Jupiter is 35 arcsec wide, and Sirius A and B vary from 3 to 11 arcsec. Furthermore, LEO objects move across a very large region, making telescope tracking extremely challenging.
- When using AO correction, the corrected field is usually sufficient for observing a single astronomical target. However, achieving this on a fast-moving LEO object is difficult, as very few frames can be deblurred with the corrected wavefront during the imaging process.
2. Deteriorated Observation by Atmospheric Turbulence and Platform Condition
2.1. Modeling Phase Screens by Atmospheric Turbulence
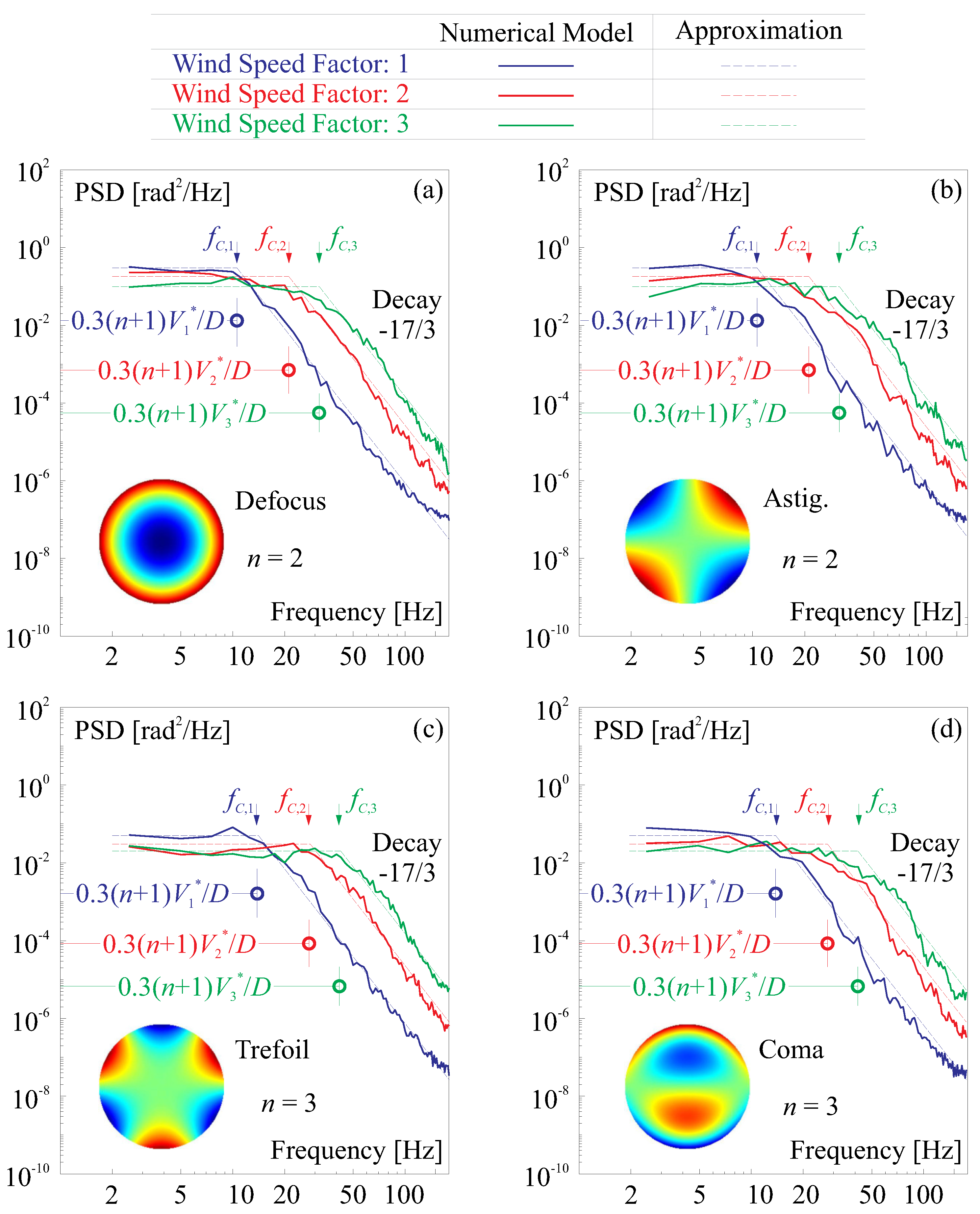
2.1.1. Modal Analysis of a Phase Screen
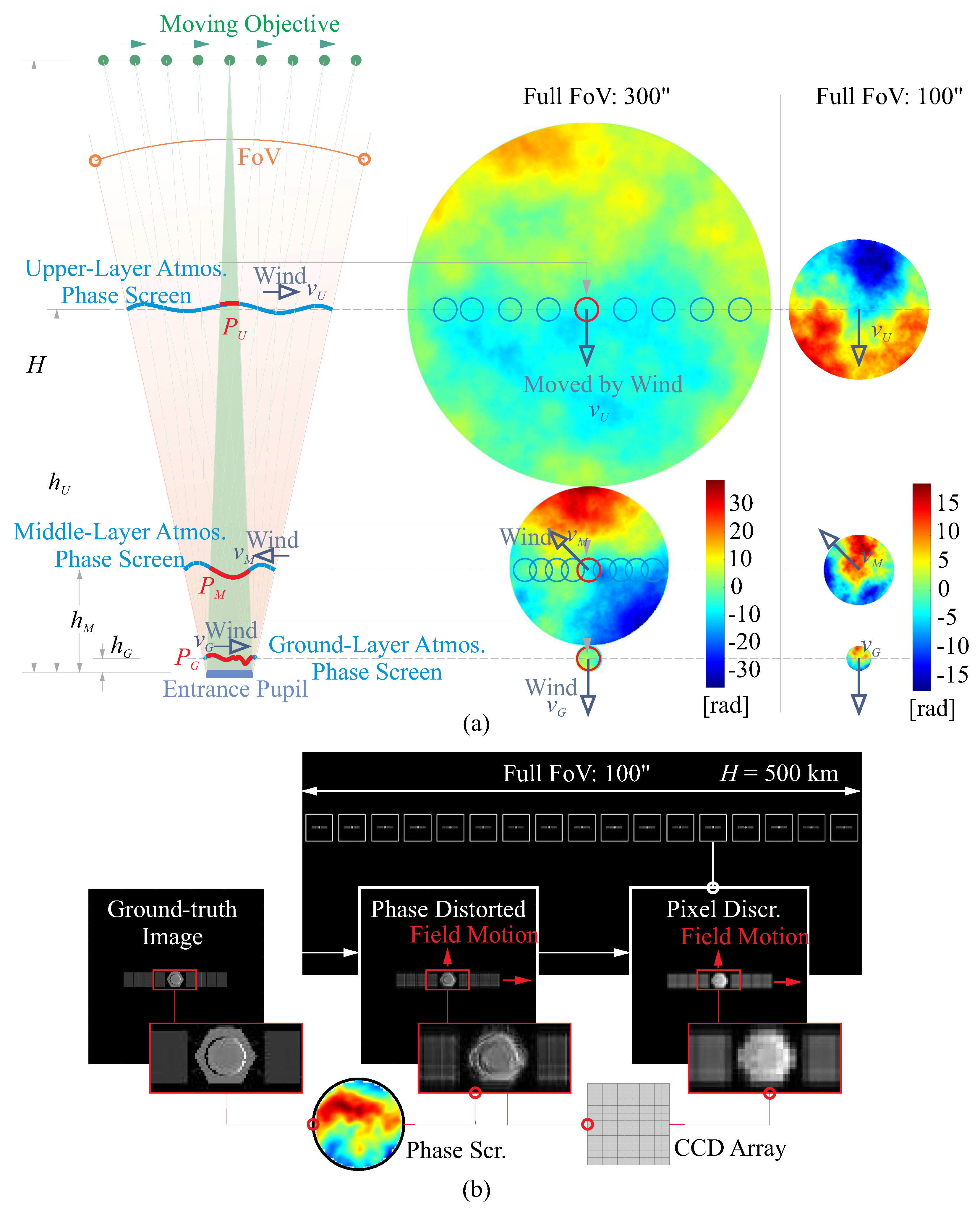
2.1.2. Image Formation with a Disturbing Phase
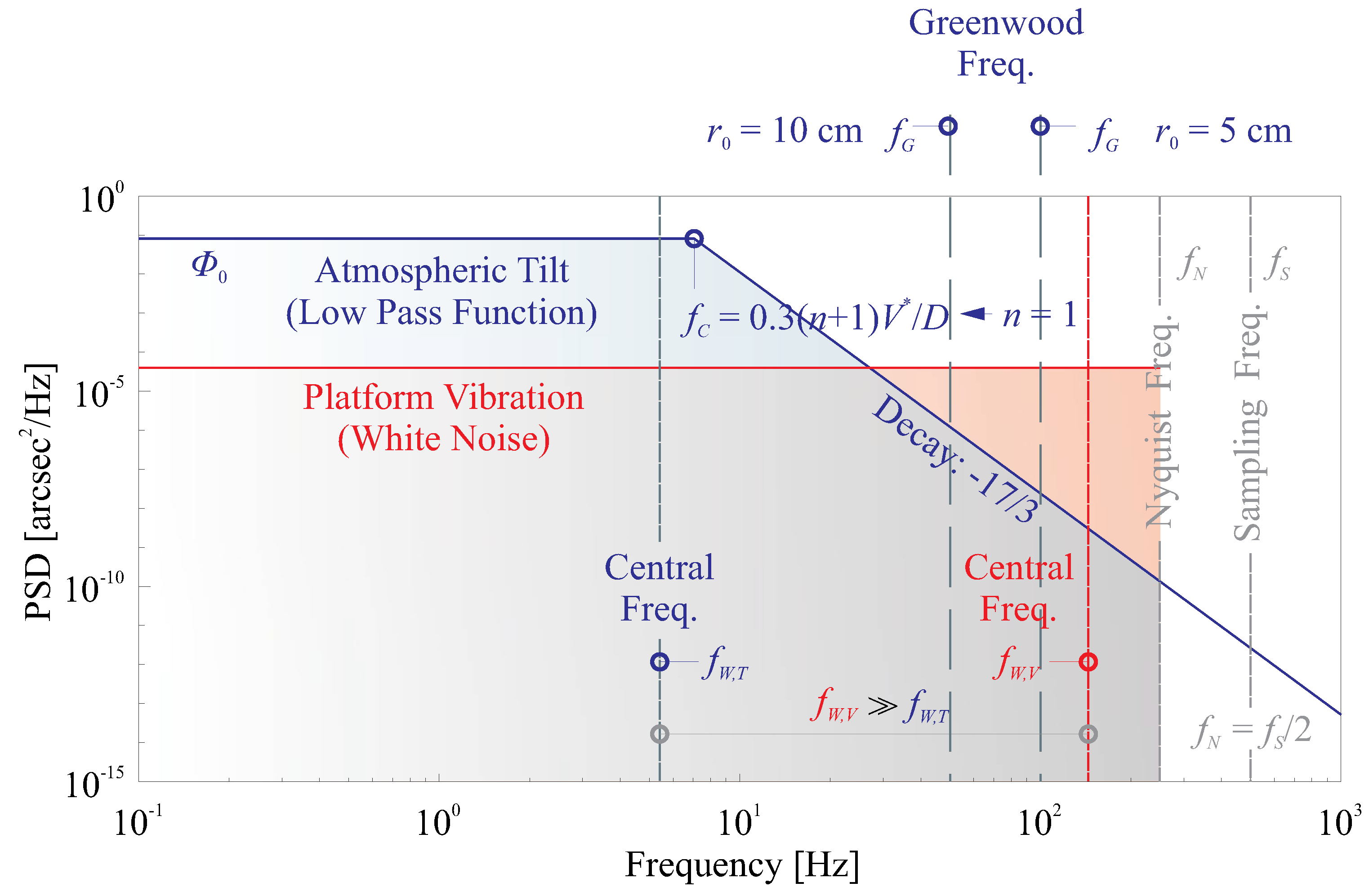
2.2. Image Jitter Due to Optical Tilt
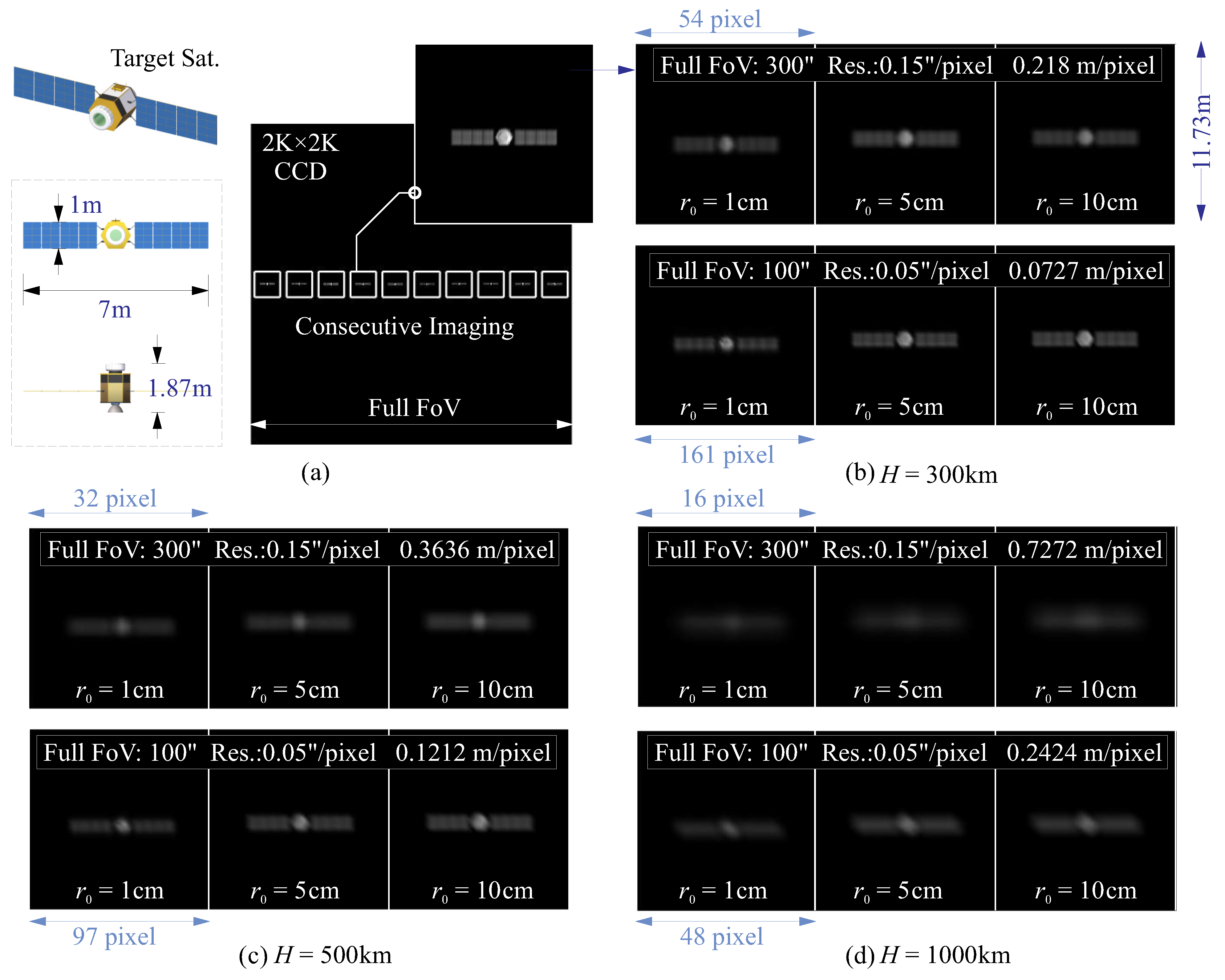
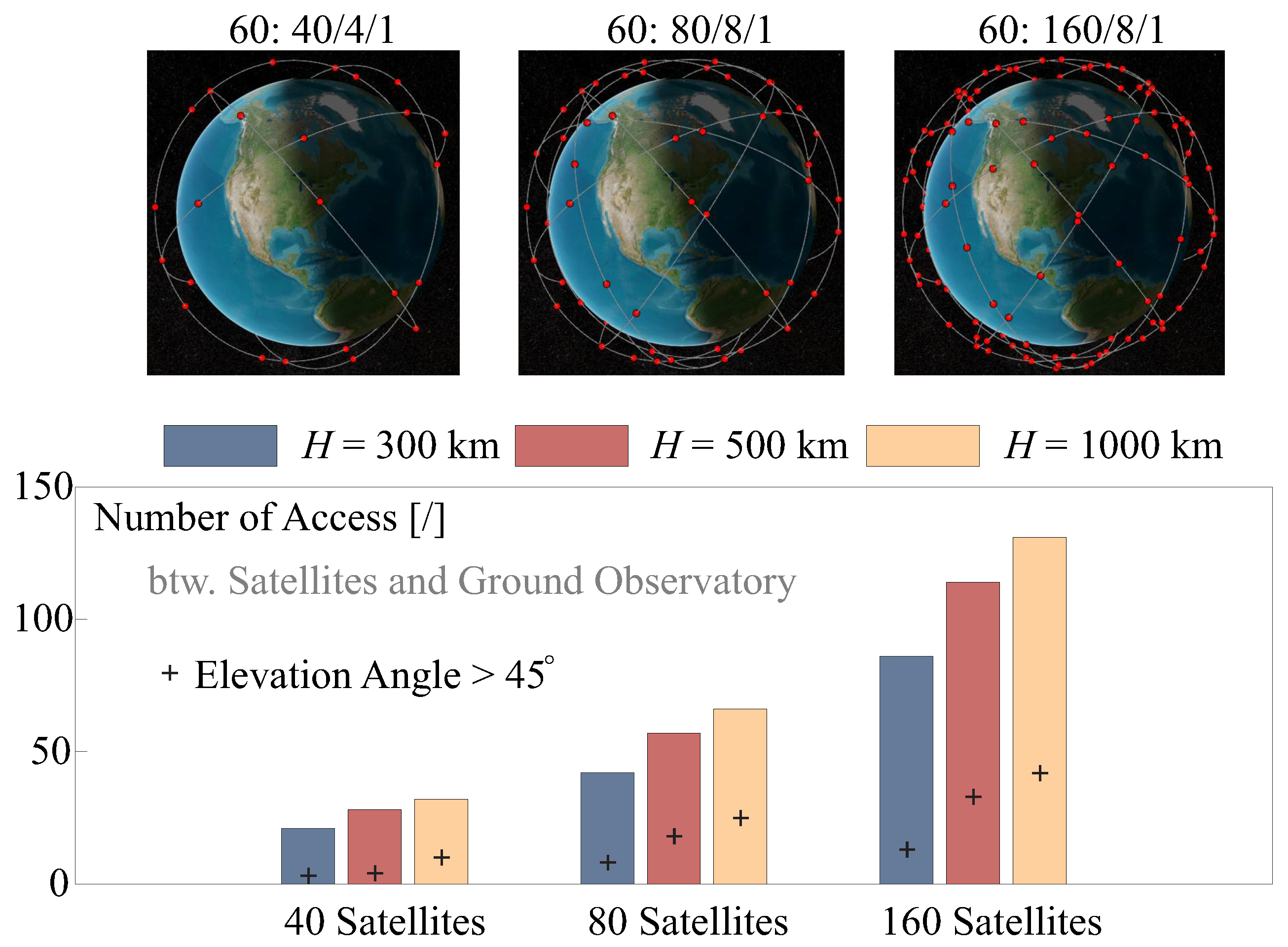
3. Scenario Simulation on Observation Opportunities
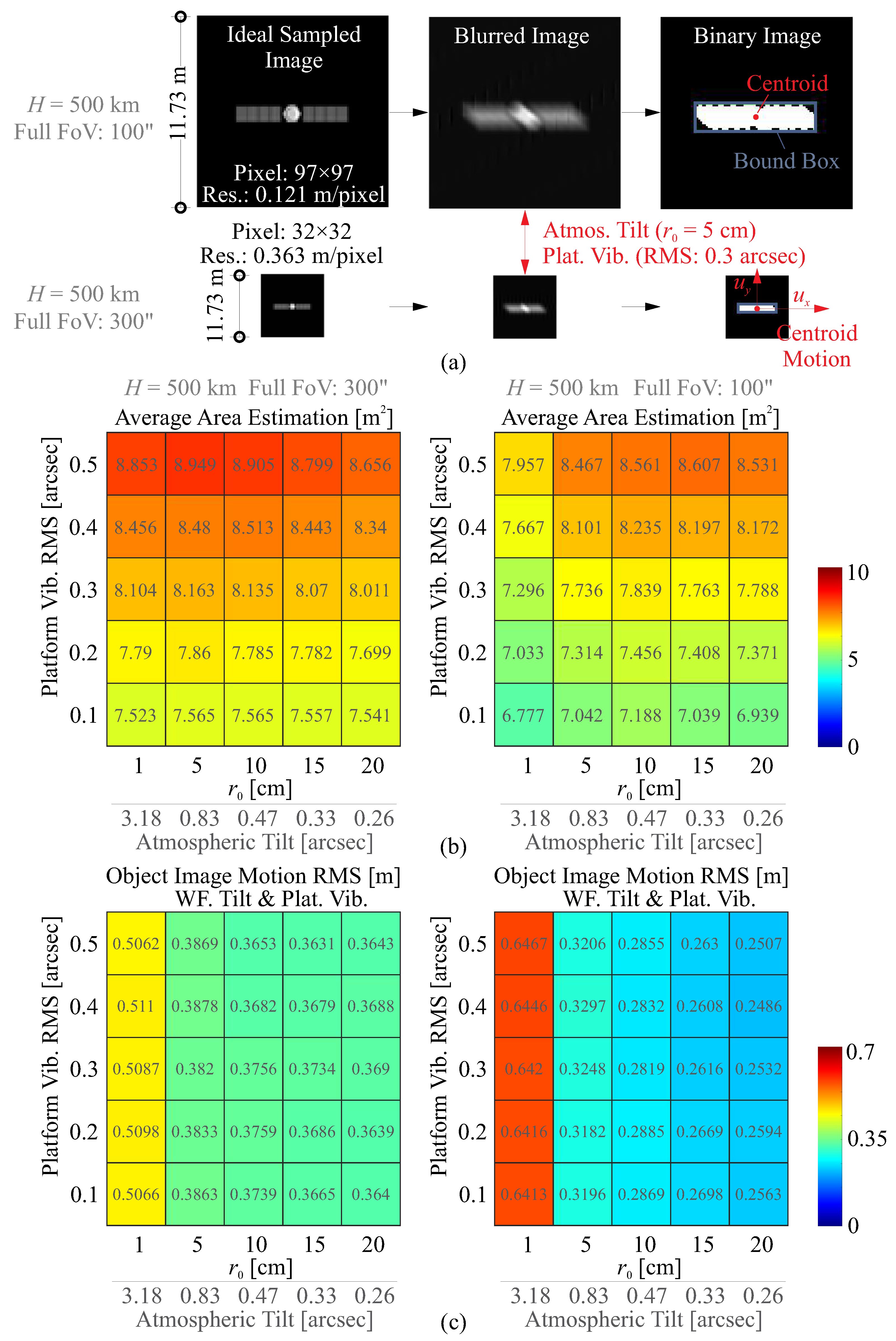
3.1. Tracking on Features of Observed Objects in Consecutive Frames
4. Refining for Consecutive Imaging Based on Adaptive Optics and Filtering Strategies
4.1. Wavefront Correctors in the Adaptive Optics (AO) System
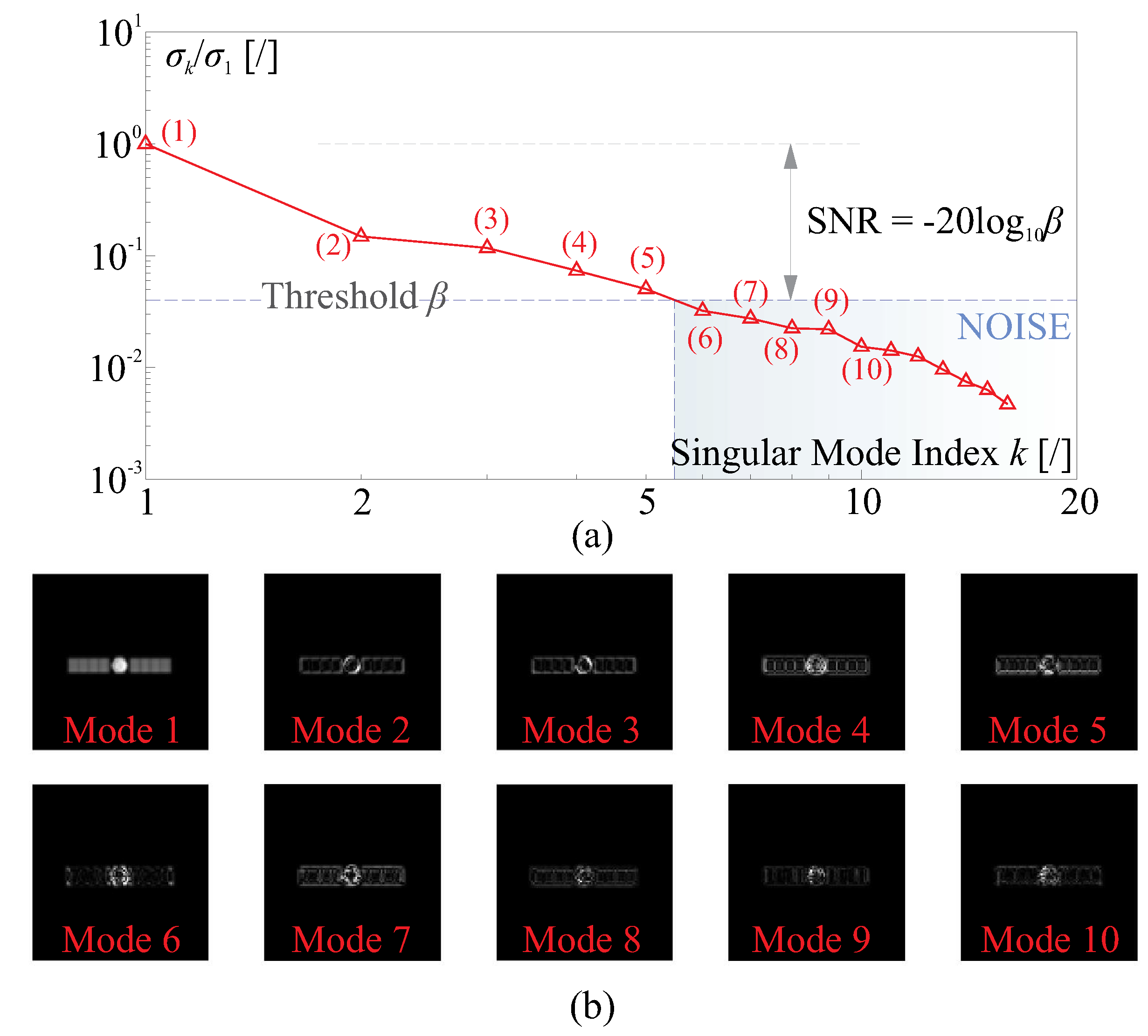
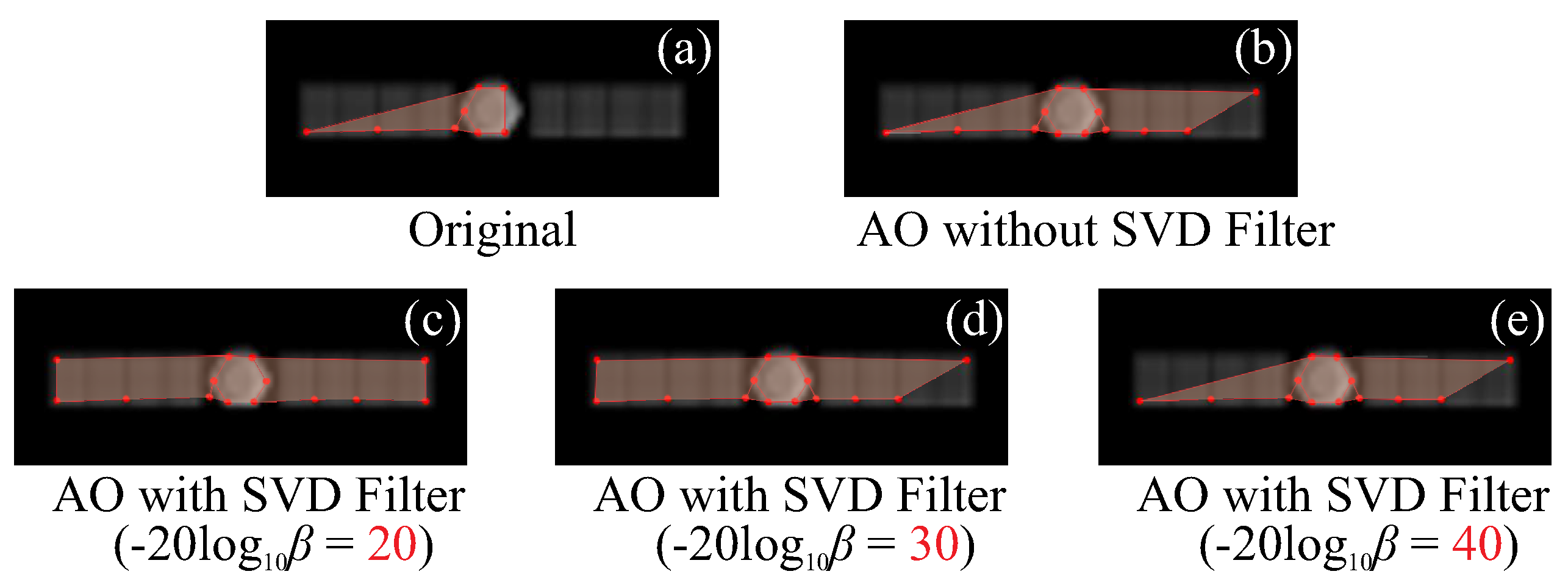
4.2. Refining Strategies of Consecutive Image Set with Singular Value Decomposition Filtering
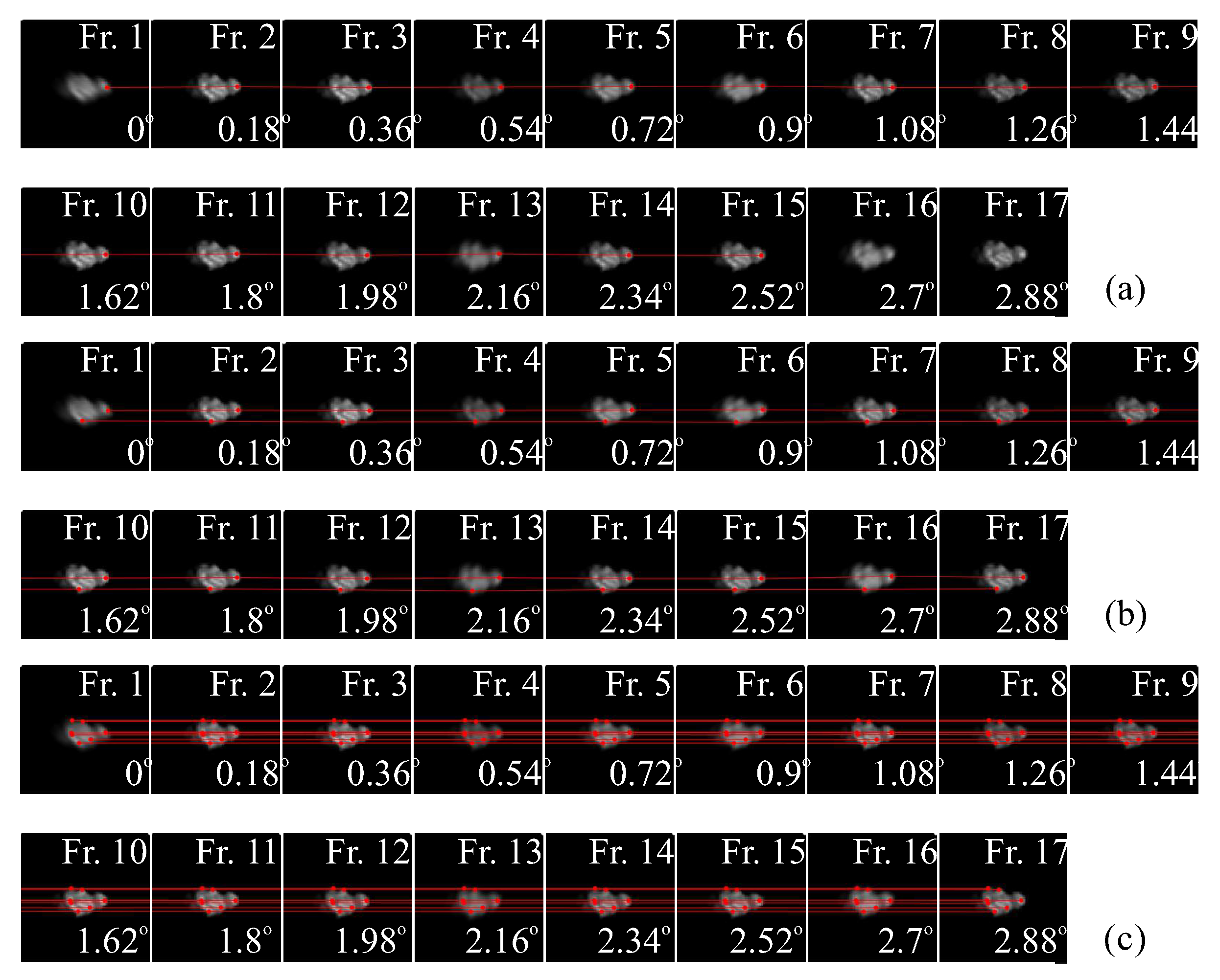
4.3. Tracking Objects with Attitude Changes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yanagisawa, T.; Kurosaki, H.; Oda, H.; Tagawa, M. Ground-based Optical Observation System for LEO Objects. Adv. Space Res. 2015, 56, 414–420. [Google Scholar] [CrossRef]
- Lei, X.; Li, Z.; Du, J.; Chen, J.; Sang, J.; Liu, C. Identification of Uncatalogued LEO Space Objects by a Ground-based EO array. Adv. Space Res. 2021, 67, 350–359. [Google Scholar] [CrossRef]
- Werth, M.; Lucas, J.; Kyono, T.; Mcquaid, I.; Fletcher, J. A Machine Learning Dataset of Synthetic Ground-Based Observations of LEO Satellites. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Dainty, J.C. Optical Effects of Atmospheric Turbulence. In Laser Guide Star Adaptive Optics for Astronomy; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Fried, D.L. Optical Resolution Through a Randomly Inhomogeneous Medium for Very Long and Very Short Exposures. J. Opt. Soc. Am. 1966, 56, 1372–1379. [Google Scholar] [CrossRef]
- Tyson, R.K. Priciple of Adaptive Optics; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Roddier, F. Adaptive Optics in Astronomy; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Potter, A.E. Ground-based Optical Observations of Orbital Debris: A Review. Adv. Space Res. 1995, 16, 35–45. [Google Scholar] [CrossRef]
- Sun, R.Y.; Yu, P.P.; Zhang, W. Precise Position Measurement for Resident Space Object with Point Spread Function Modeling. Adv. Space Res. 2022, 70, 2315–2322. [Google Scholar] [CrossRef]
- Fugate, R.Q.; Ellerbroek, B.L.; Stewart, E.J.; Colucci, D.N.; Ruane, R.E.; Spinhirne, J.M.; Cleis, R.A.; Eager, R. First Observations with the Starfire Optical Range 3.5-meter Telescope. In Proceedings of the 1994 Symposium on Astronomical Telescopes and Instrumentation for the 21st Century, Kailua-Kona, HI, USA, 13–18 March 1994. [Google Scholar]
- Fugate, R.Q.; Ellerbroek, B.L.; Higgins, C.H.; Jelonek, M.P.; Lange, W.J.; Slavin, A.C.; Wild, W.J.; Winker, D.M.; Wynia, J.M.; Spinhirne, J.M.; et al. Two Generations of Laser-guide-star Adaptive-Optics Experiments at the Starfire Optical Range. J. Opt. Soc. Am. A 1995, 11, 310–324. [Google Scholar] [CrossRef]
- Fugate, R.Q. Prospects for Benefits to Astronomical Adaptive Optics from US Military Programs. In Proceedings of the Astronomical Telescopes and Instrumentation, Munich, Germany, 27 March–1 April 2000. [Google Scholar]
- Tyler, D.W.; Prochko, A.E.; Miller, N.A. Adaptive Optics Design for the Advanced Electro-Optical System (AEOS); (Ref: PL-TR-94-1043); Phillips Laboratory: Albuquerque, NM, USA, 1994. [Google Scholar]
- Dayton, D.; Gonglewski, J.; Restaino, S.; Martin, J.; Phillips, J.; Hartman, M.; Browne, S.; Kervin, P.; Snodgrass, J.; Heimann, N.; et al. Demonstration of New Technology MEMS and Liquid Crystal Adaptive Optics on Bright Astronomical Objects and Satellites. Opt. Express 2002, 10, 1508–1519. [Google Scholar] [CrossRef]
- Bennet, F.; D’Orgeville, C.; Gao, Y.; Gardhouse, W.; Paulin, N.; Price, I.; Rigaut, F.; Ritchie, I.T.; Smith, C.H.; Uhlendorf, K.; et al. Adaptive Optics for Space Debris Tracking. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Montréal, QC, Canada, 22–27 June 2014. [Google Scholar]
- Copeland, M.; Bennet, F.; Zovaro, A.; Riguat, F.; Piatrou, P.; Korkiakoski, V.; Smith, C. Adaptive Optics for Satellite and Debris Imaging in LEO and GEO. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 20–23 September 2016. [Google Scholar]
- Petit, C.; Mugnier, L.; Bonnefois, A.; Conan, J.M.; Fusco, T.; Levraud, N.; Meimon, S.; Michau, V.; Montri, J.; Vedrenne, N.; et al. LEO Satellite Imaging with Adaptive Optics and Marginalized Blind Deconvolution. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 15–18 September 2020. [Google Scholar]
- Bastaits, R. Extremely Large Segmented Mirrors: Dynamics, Control and Scale Effects. Ph.D. Thesis, Université Libre de Bruxelles, Brussels, Belgium, 2010. [Google Scholar]
- Wang, K.; Alaluf, D.; Mokrani, B.; Preumont, A. Control-Structure Interaction in Piezoelectric Deformable Mirrors for Adaptive Optics. Smart Struct. Syst. 2018, 21, 777–791. [Google Scholar]
- Goodman, J.W. Introduction to Fourier Optics; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- Conan, J.-M.; Rousset, G.; Madec, P.-Y. Wave-front Temporal Spectra in High Resolution Imaging through Turbulence. J. Opt. Soc. Am. A 1995, 12, 1559–1570. [Google Scholar] [CrossRef]
- Tokovinin, A. Seeing Improvement with Ground-layer Adaptive Optics. Publ. Astron. Soc. Pac. 2004, 116, 941. [Google Scholar] [CrossRef]
- Hart, M.; Milton, N.M.; Baranec, C.; Powell, K.; Stalcup, T.; Mccarthy, D.; Kulesa, C.; Bendek, E. A Ground-layer Adaptive Optics System with Multiple Laser Guide Stars. Nature 2010, 466, 727–729. [Google Scholar] [CrossRef] [PubMed]
- Noll, R.J. Zernike Polynomials and Atmospheric Turbulence. J. Opt. Soc. Am. A 1976, 66, 207–211. [Google Scholar] [CrossRef]
- Biswas, P.; Sarkar, A.S.; Mynuddin, M. Deblurring Images Using a Wiener Filter. Int. J. Comput. Appl. 2015, 109, 36–38. [Google Scholar] [CrossRef]
- Wang, K. Piezoelectric Adaptive Mirrors for Ground-based and Space Telescopes. Ph.D. Thesis, Université Libre de Bruxelles, Brussels, Belgium, 2019. [Google Scholar]
- Voelz, D. Computational Fourier Optics: A MATLAB Tutorial; SPIE Press: Bellingham, WA, USA, 2011. [Google Scholar]
- Lei, F.; Tiziani, H.J. Atmospheric Influence on Image Quality of Airborne Photographs. Opt. Eng. 1993, 32, 2271–2280. [Google Scholar] [CrossRef]
- Bos, J.P.; Roggemann, M.C. Technique for Simulating Anisoplanatic Image Formation over Long Horizontal Paths. Opt. Eng. 2012, 51, 101704. [Google Scholar] [CrossRef]
- Hunt, B.R.; Iler, A.L.; Bailey, C.A.; Rucci, M.A. Synthesis of Atmospheric Turbulence Point Spread Functions by Sparse and Redundant Representations. Opt. Eng. 2018, 57, 024101. [Google Scholar]
- Schroeder, D.J. Astronomical Optics, 2nd ed.; Academic Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Tang, T.; Niu, S.; Ma, J.; Qi, B.; Ren, G.; Huang, Y. A Review on Control Methodologies of Disturbance Rejections in Optical Telescope. Opto-Electron. Adv. 2019, 2, 190011. [Google Scholar] [CrossRef]
- Macmynowski, D.G.; Andersen, T. Wind Buffeting of Large Telescopes. Appl. Opt. 2010, 49, 625–636. [Google Scholar] [CrossRef]
- Wang, K.; Preumont, A. Field Stabilization Control of the European Extremely Large Telescope under Wind Disturbance. Appl. Opt. 2019, 58, 1174–1184. [Google Scholar] [CrossRef]
- Tyler, G.A. Bandwidth Considerations for Tracking through Turbulence. J. Opt. Soc. Am. A 1994, 11, 358–367. [Google Scholar] [CrossRef]
- Walker, J.G. Satellite Constellations. J. Br. Interplanet. Soc. 1984, 37, 559–571. [Google Scholar]
- Bellavia, F.; Tegolo, D.; Valenti, C. Improving Harris Corner Selection Strategy. IET Comput. Vis. 2011, 5, 87–96. [Google Scholar] [CrossRef]
- Gueguen, L.; Pesaresi, M. Multi Scale Harris Corner Detector Based nn Differential Morphological Decomposition. Pattern Recognit. Lett. 2011, 32, 1714–1719. [Google Scholar] [CrossRef]
- Zeng, Q.; Liu, L.; Li, J. Image Registration Method Based On Improved Harris Corner Detector. Chin. Opt. Lett. 2010, 8, 573–576. [Google Scholar] [CrossRef]
- Madec., P.-Y. Overview of Deformable Mirror Technologies for Adaptive Optics and Astronomy. In Proceedings of the SPIE Astronomical Telescopes and Instrumentation, Amsterdam, The Netherlands, 1–6 July 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Height h [km] | Fraction w [%] | Wind Velocity [m/s] |
|---|---|---|---|
| Ground | 0.1 | 70 | 10 |
| Middle | 4 | 25 | 15 |
| Upper | 10 | 5 | 20 |
| Equivalent size of the Gaussian filter: m | ||||
| [cm] | (w. Turbulence) | (w/o. Turbulence) | (w. Turbulence) | (w/o. Turbulence) |
| ine 1 | 5.17 | 1.18 | 1.31 | 15 |
| 5 | 4.14 | 1.18 | 6.44 | 15 |
| 10 | 3.45 | 1.18 | 6.88 | 15 |
| 20 | 2.73 | 1.18 | 7.00 | 15 |
| Equivalent size of the Gaussian filter: m | ||||
| 1 | 5.6 | 1.5 | 2.68 | 19.81 |
| 5 | 5.15 | 1.5 | 10.88 | 19.81 |
| 10 | 3.92 | 1.5 | 11.06 | 19.81 |
| 20 | 2.73 | 1.5 | 11.44 | 19.81 |
| Spin Rate () | Original | AO Correction with SVD Filtering | w/o. Turbulence |
|---|---|---|---|
| /s | 1/15 | 2/17 | 7/17 |
| /s | 2/8 | 2/17 | 5/17 |
| /s | 1/13 | 1/17 | 3/17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Yu, Y.; Gong, Y.; Yi, Y.; Zhang, X. On-Earth Observation of Low Earth Orbit Targets through Phase Disturbances by Atmospheric Turbulence. Remote Sens. 2023, 15, 4718. https://doi.org/10.3390/rs15194718
Wang K, Yu Y, Gong Y, Yi Y, Zhang X. On-Earth Observation of Low Earth Orbit Targets through Phase Disturbances by Atmospheric Turbulence. Remote Sensing. 2023; 15(19):4718. https://doi.org/10.3390/rs15194718
Chicago/Turabian StyleWang, Kainan, Yian Yu, Yuxuan Gong, Yang Yi, and Xuemin Zhang. 2023. "On-Earth Observation of Low Earth Orbit Targets through Phase Disturbances by Atmospheric Turbulence" Remote Sensing 15, no. 19: 4718. https://doi.org/10.3390/rs15194718
APA StyleWang, K., Yu, Y., Gong, Y., Yi, Y., & Zhang, X. (2023). On-Earth Observation of Low Earth Orbit Targets through Phase Disturbances by Atmospheric Turbulence. Remote Sensing, 15(19), 4718. https://doi.org/10.3390/rs15194718