
Fast and Accurate Generation Method of Geometric Digital Twin Model of RC Bridge with Box Chambers Based on Terrestrial Laser Scanning

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
2.1. Shape Representation Methods
2.2. Point Cloud Feature Extraction
2.3. Bridge gDT Model Generation
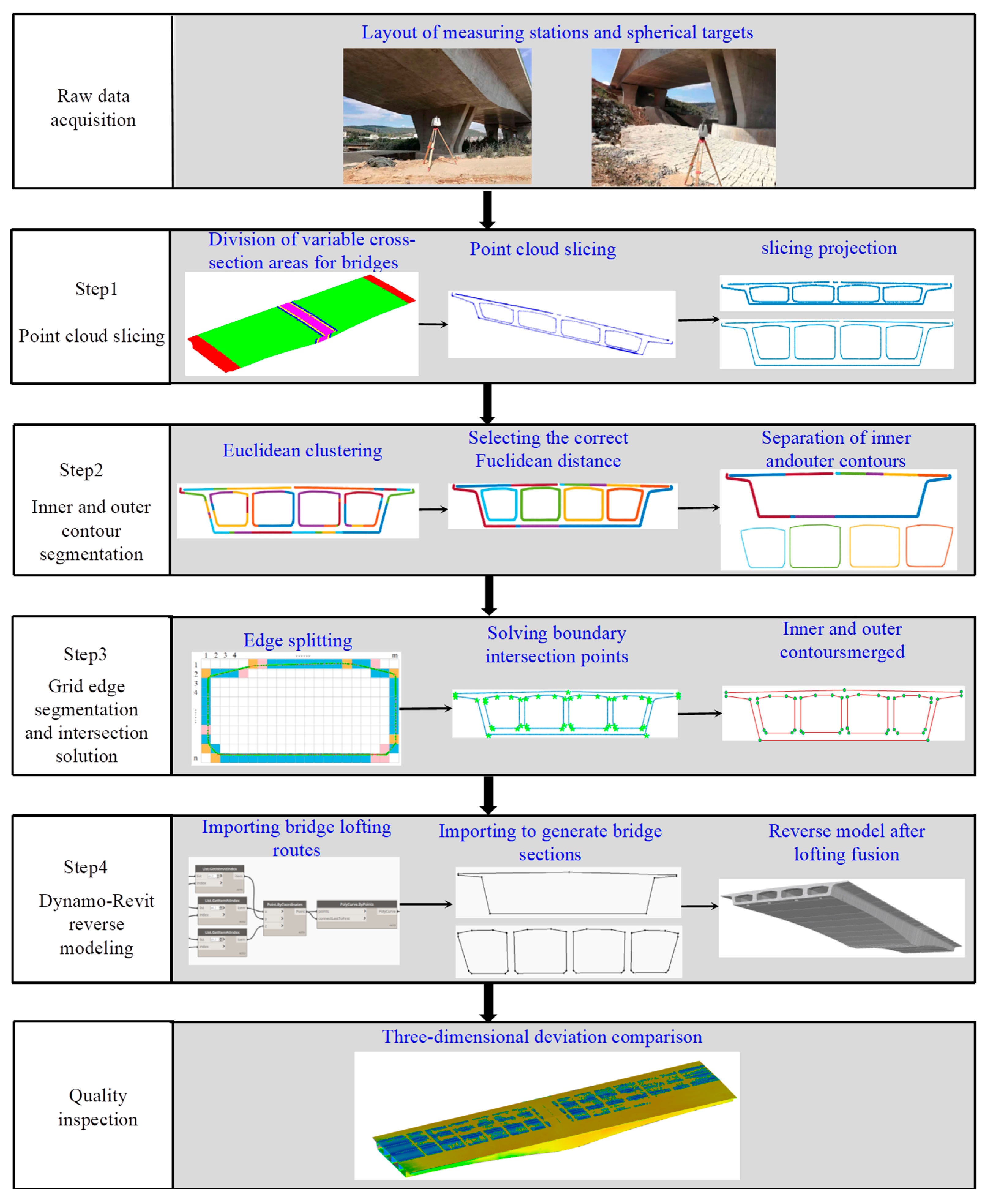
3. Method Framework
4. Proposed Approach
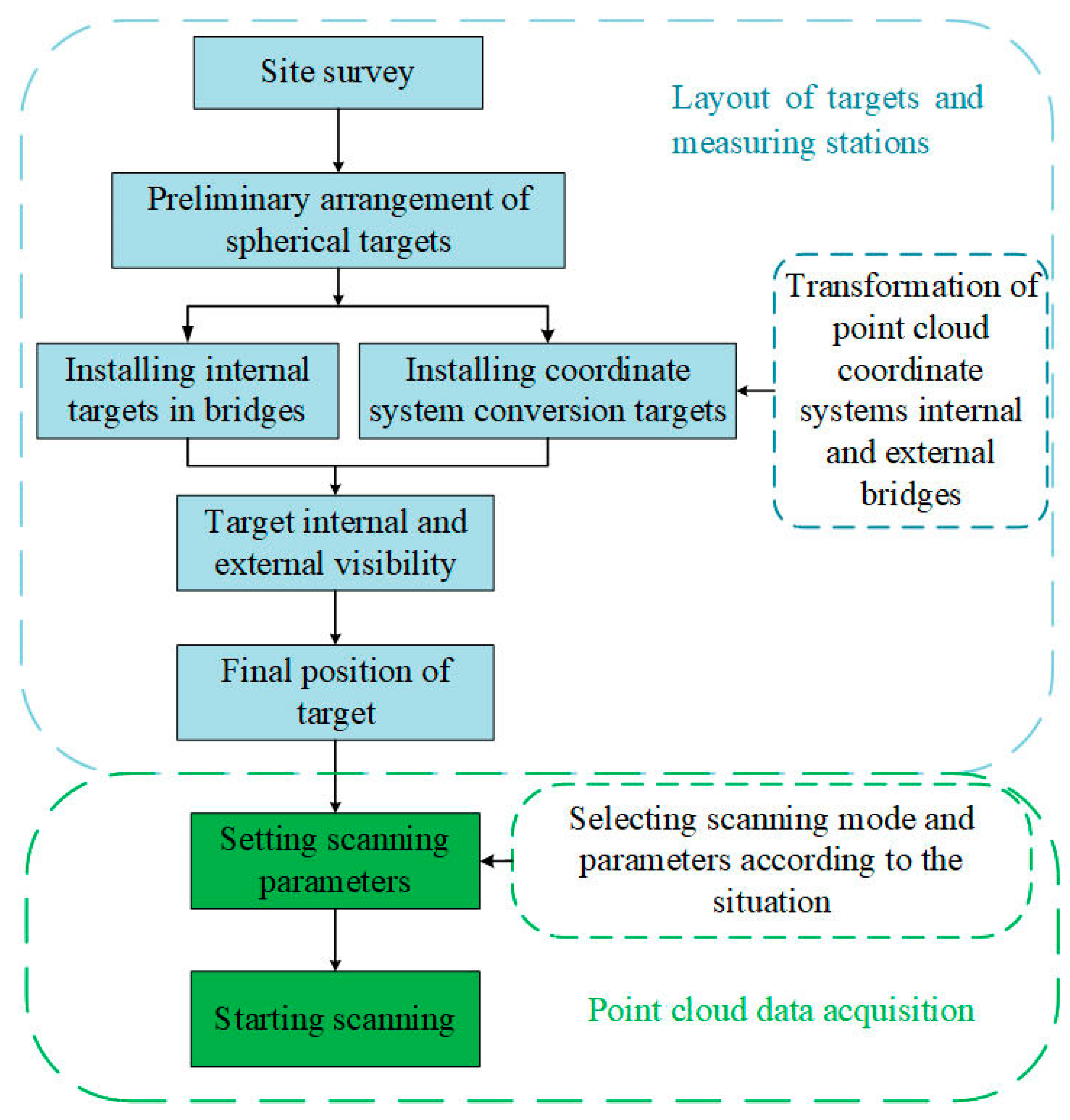
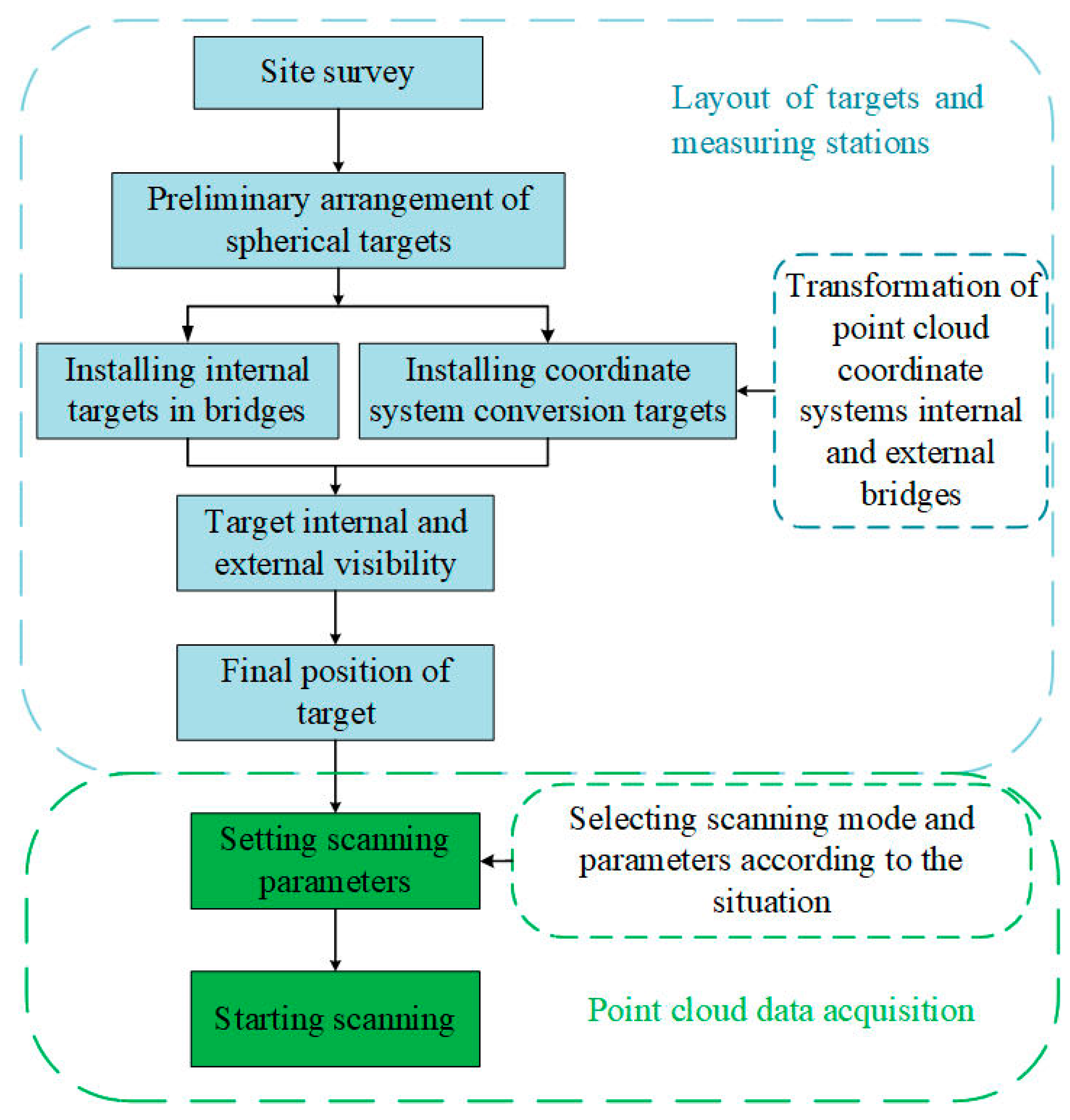
4.1. Point Cloud Acquisition Method
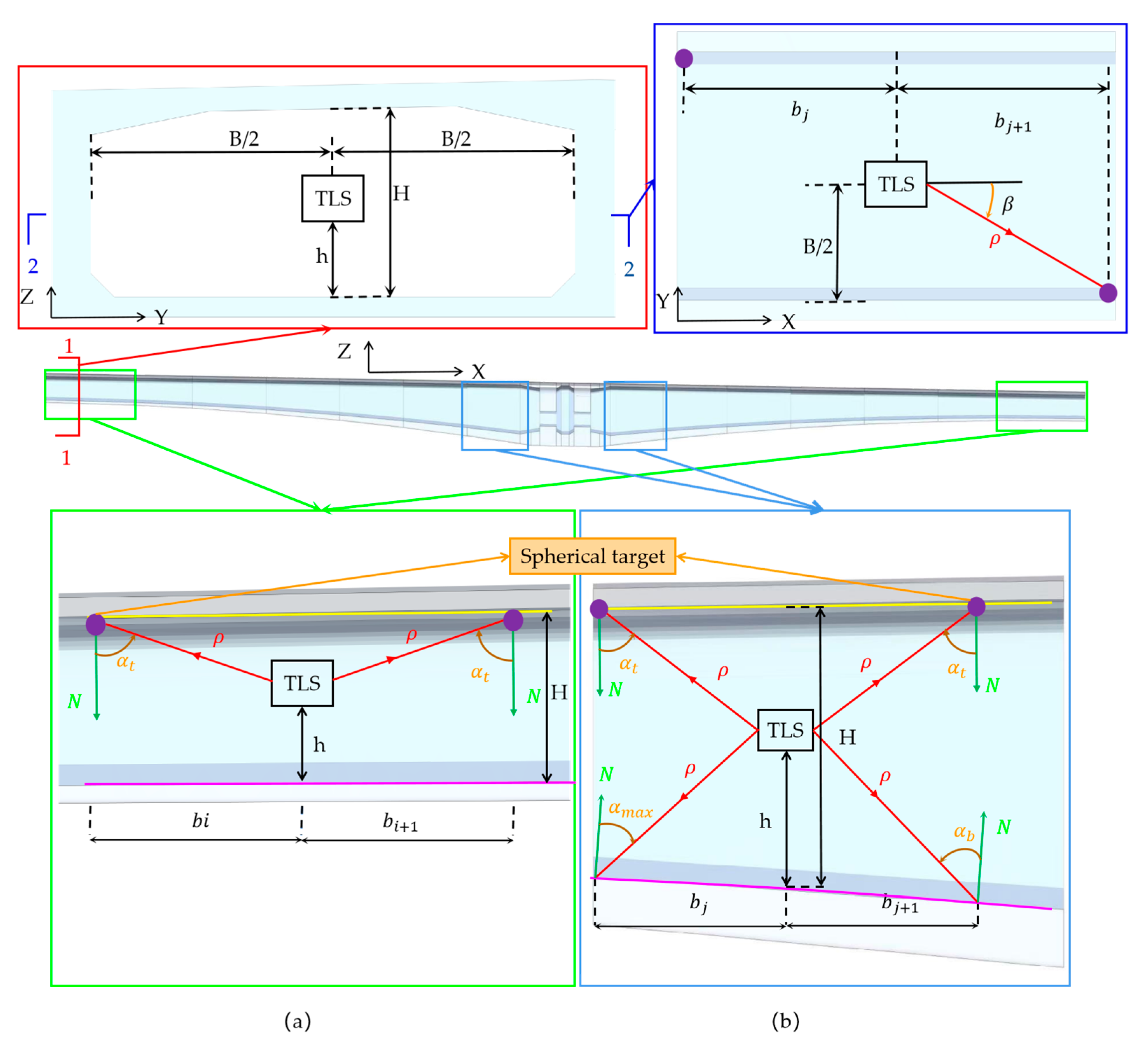
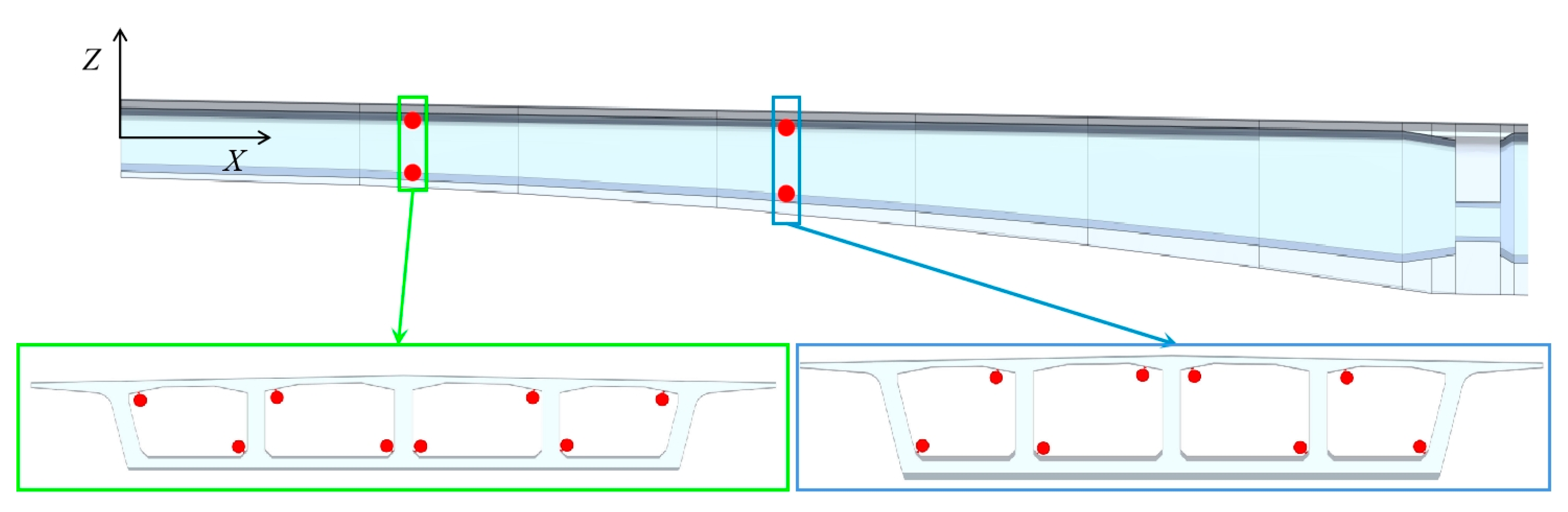
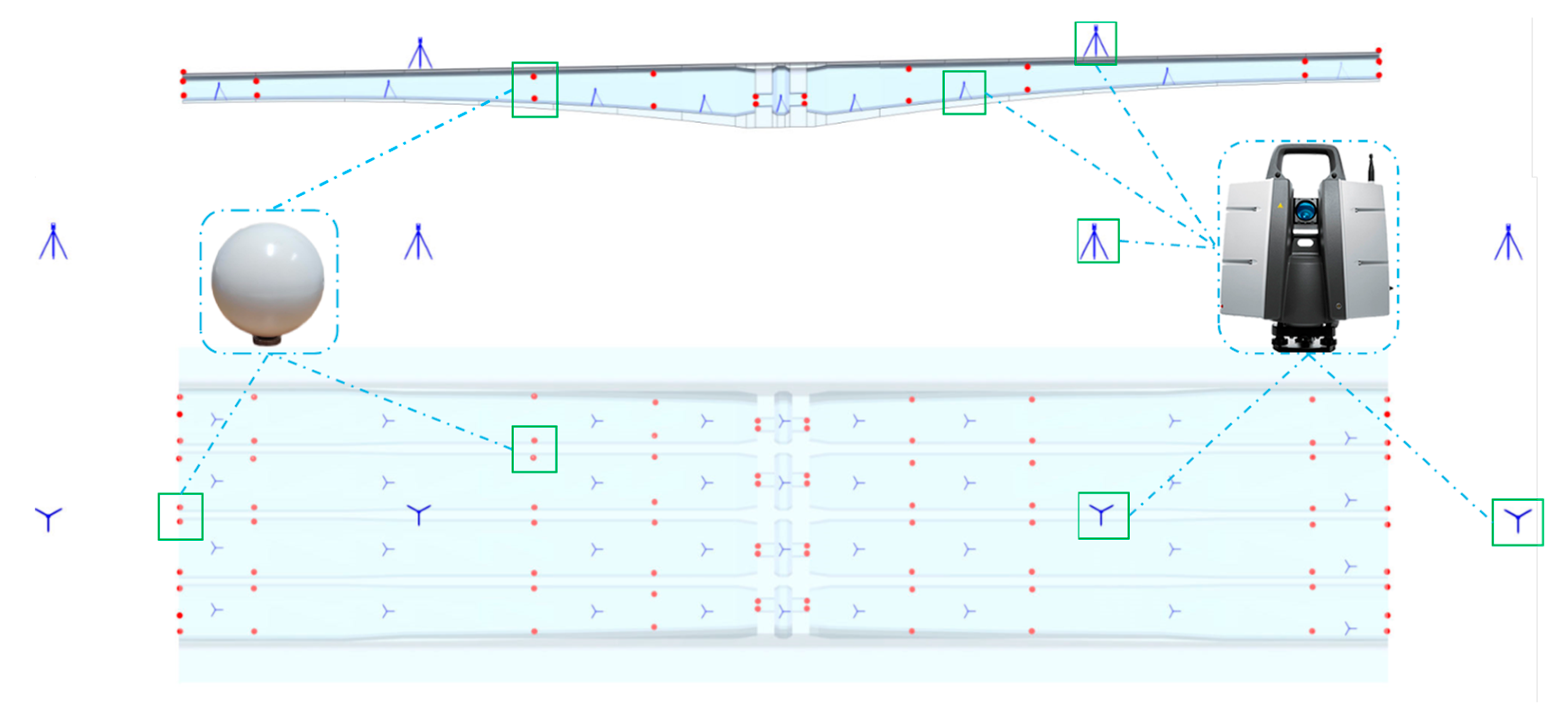
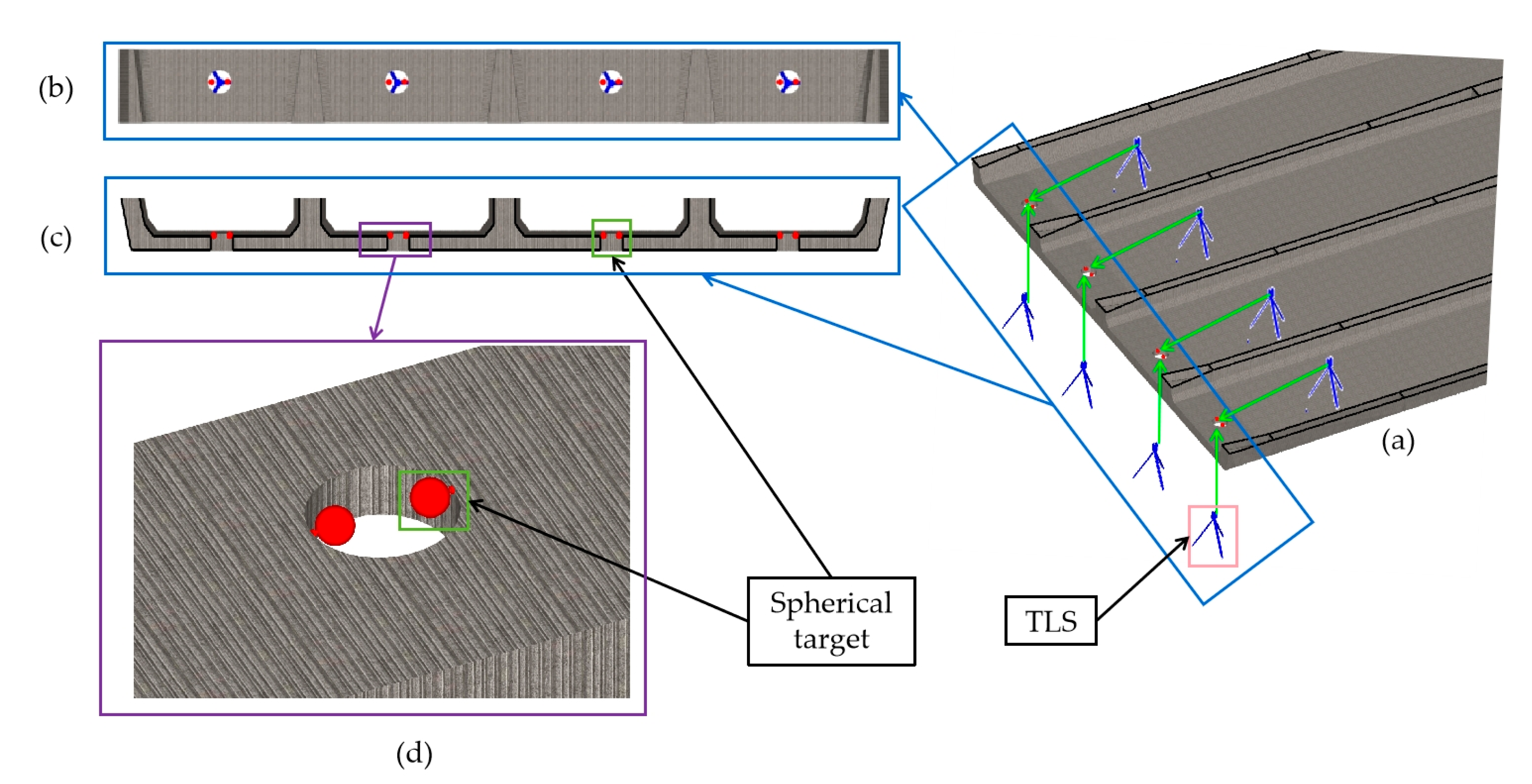
4.1.1. Layout Method of Internal Chamber Scanner Stations and Targets
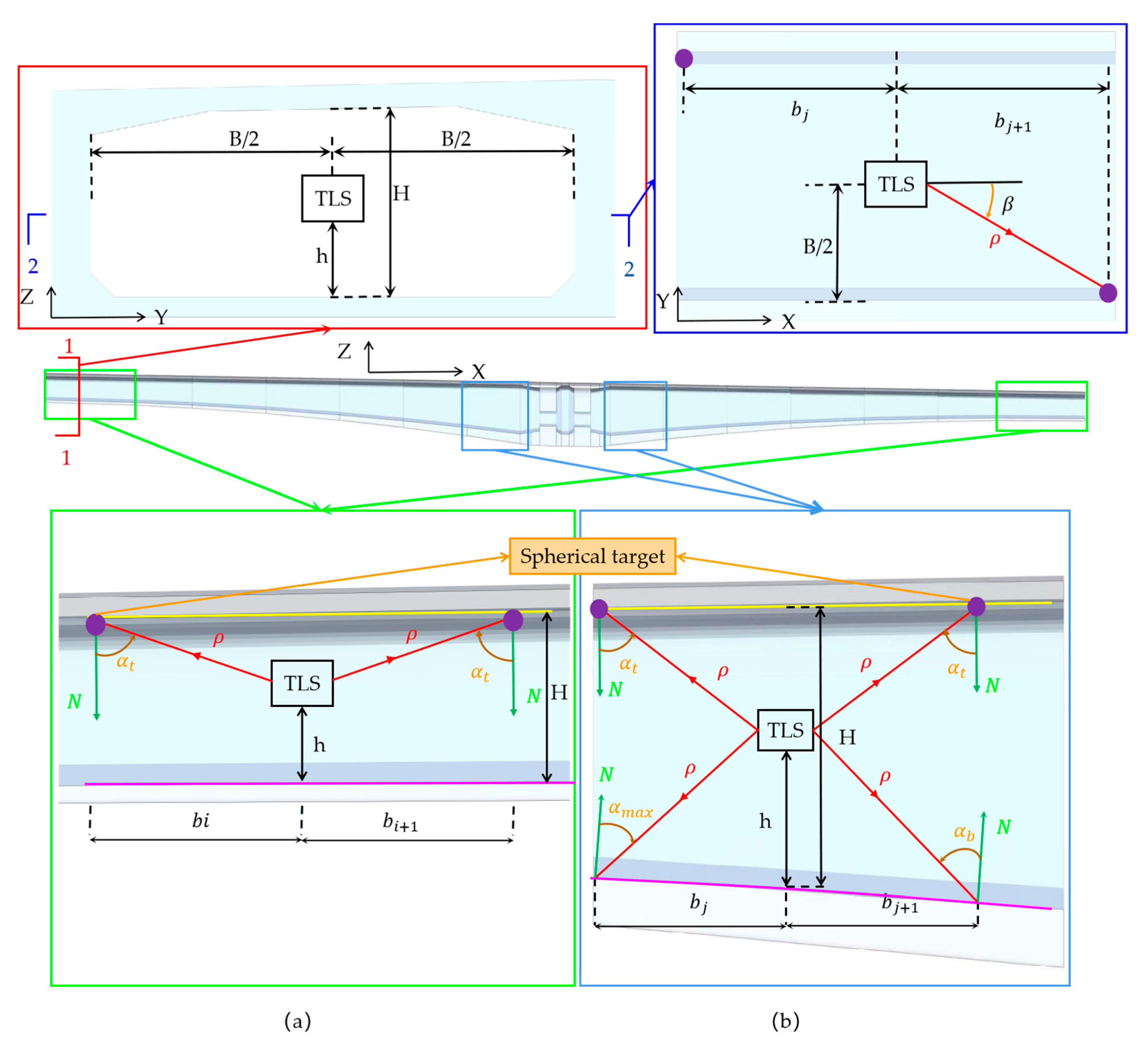
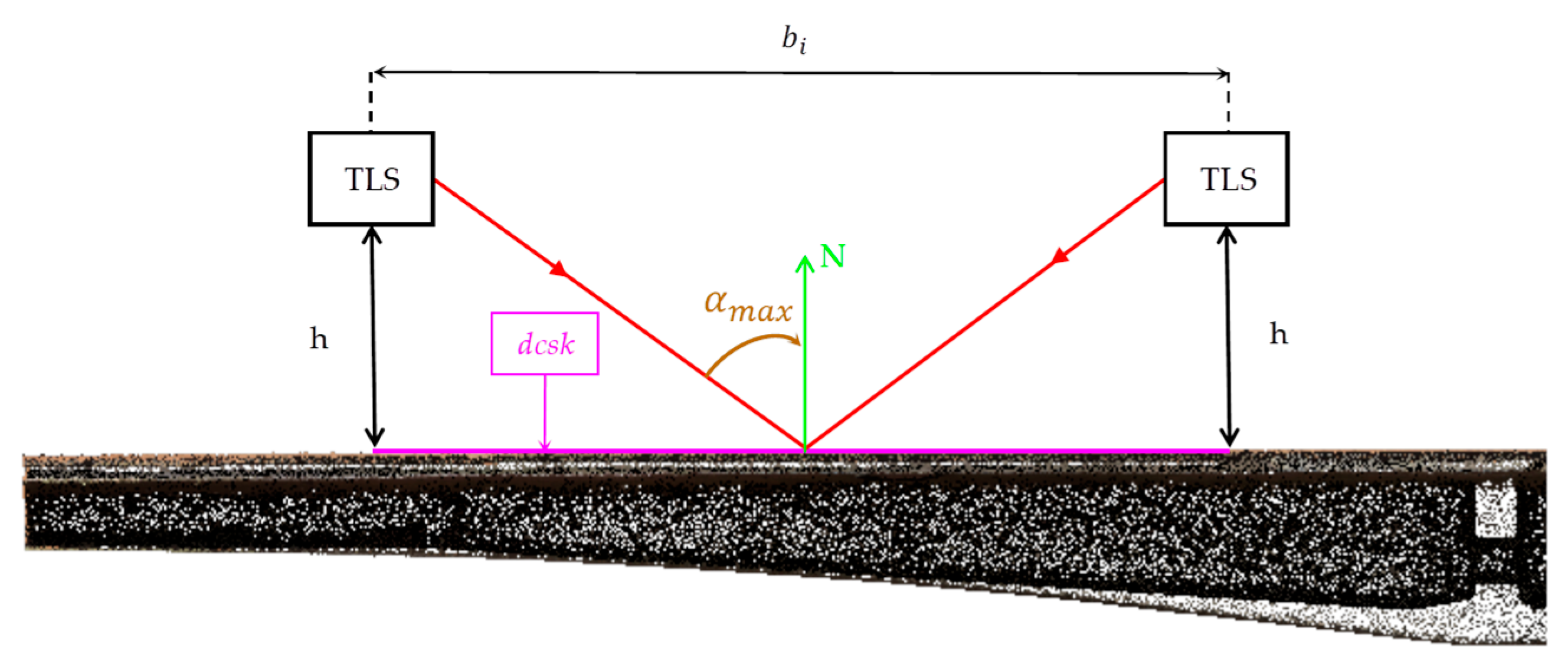
4.1.2. Layout Method of External Scanner Stations for Bridges
4.1.3. Registration Method for External and Internal Point Clouds of Bridge
Box Chambers
4.2. Method for Extracting Bridge Section Features
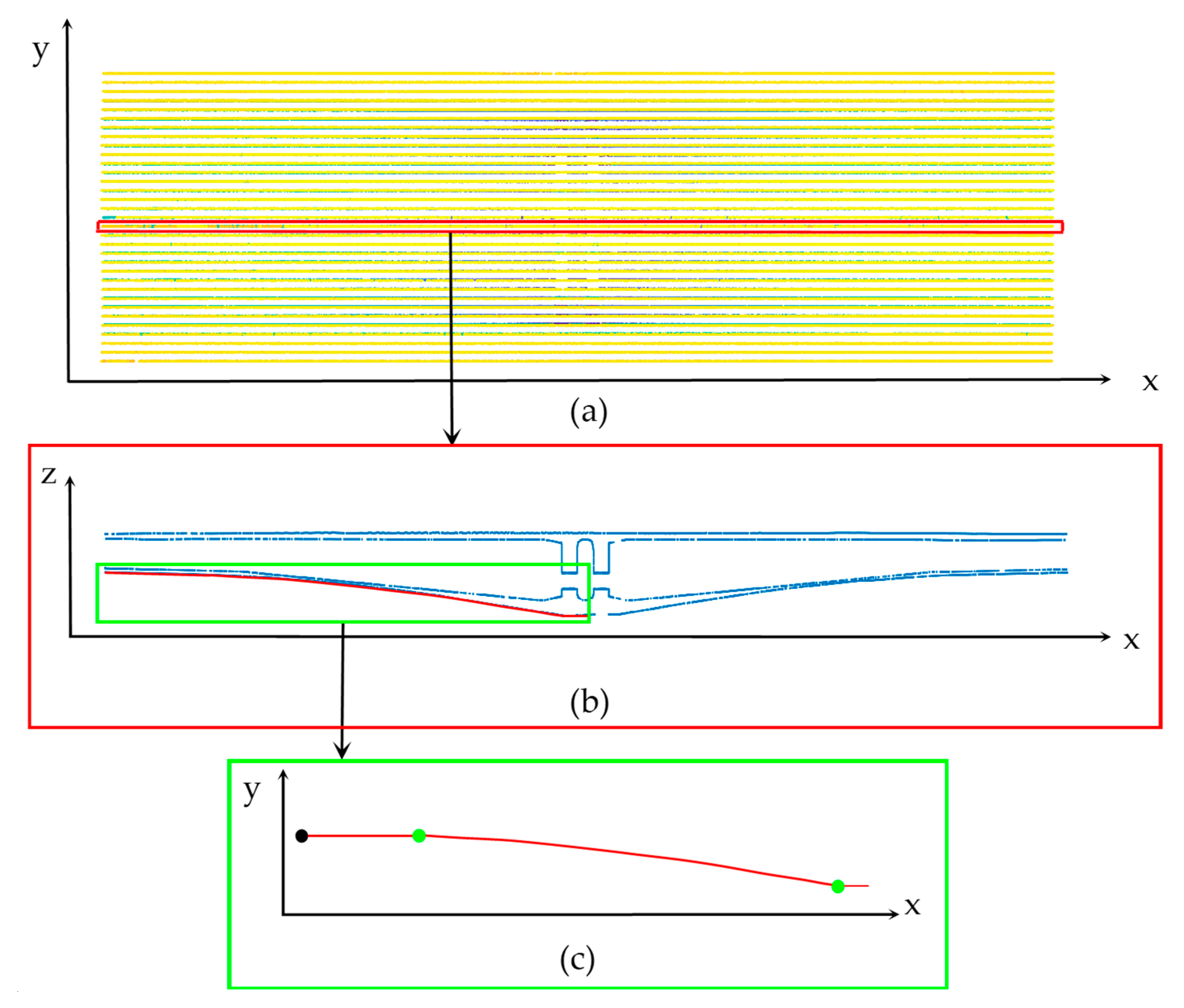
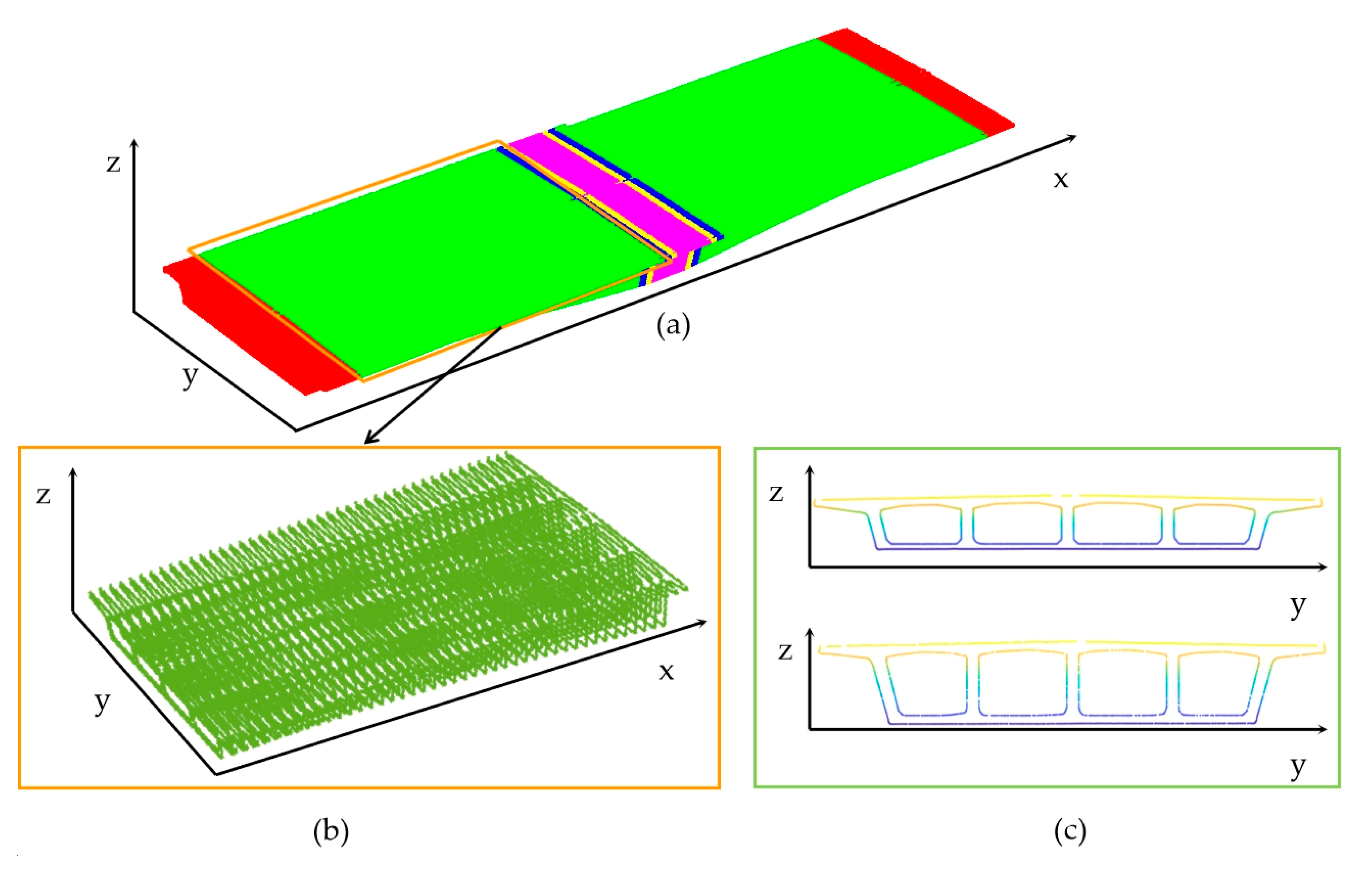
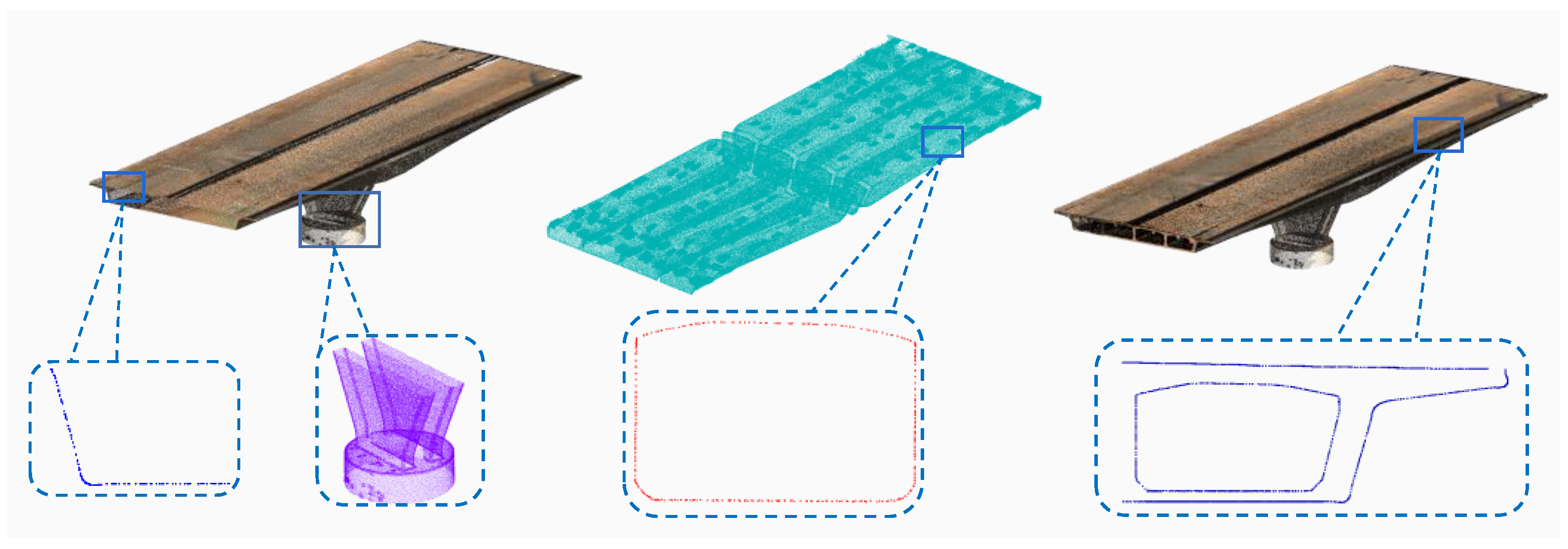
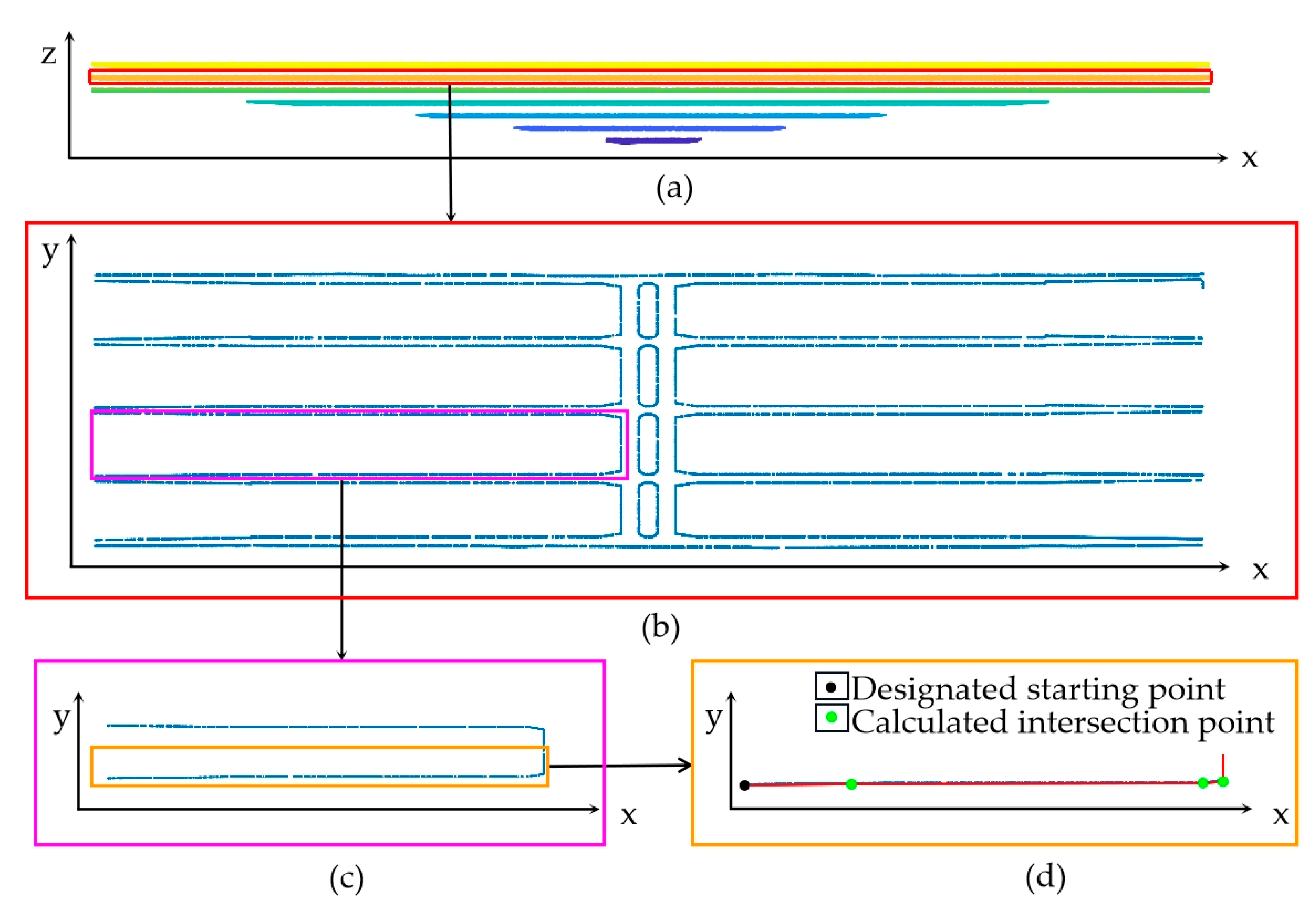
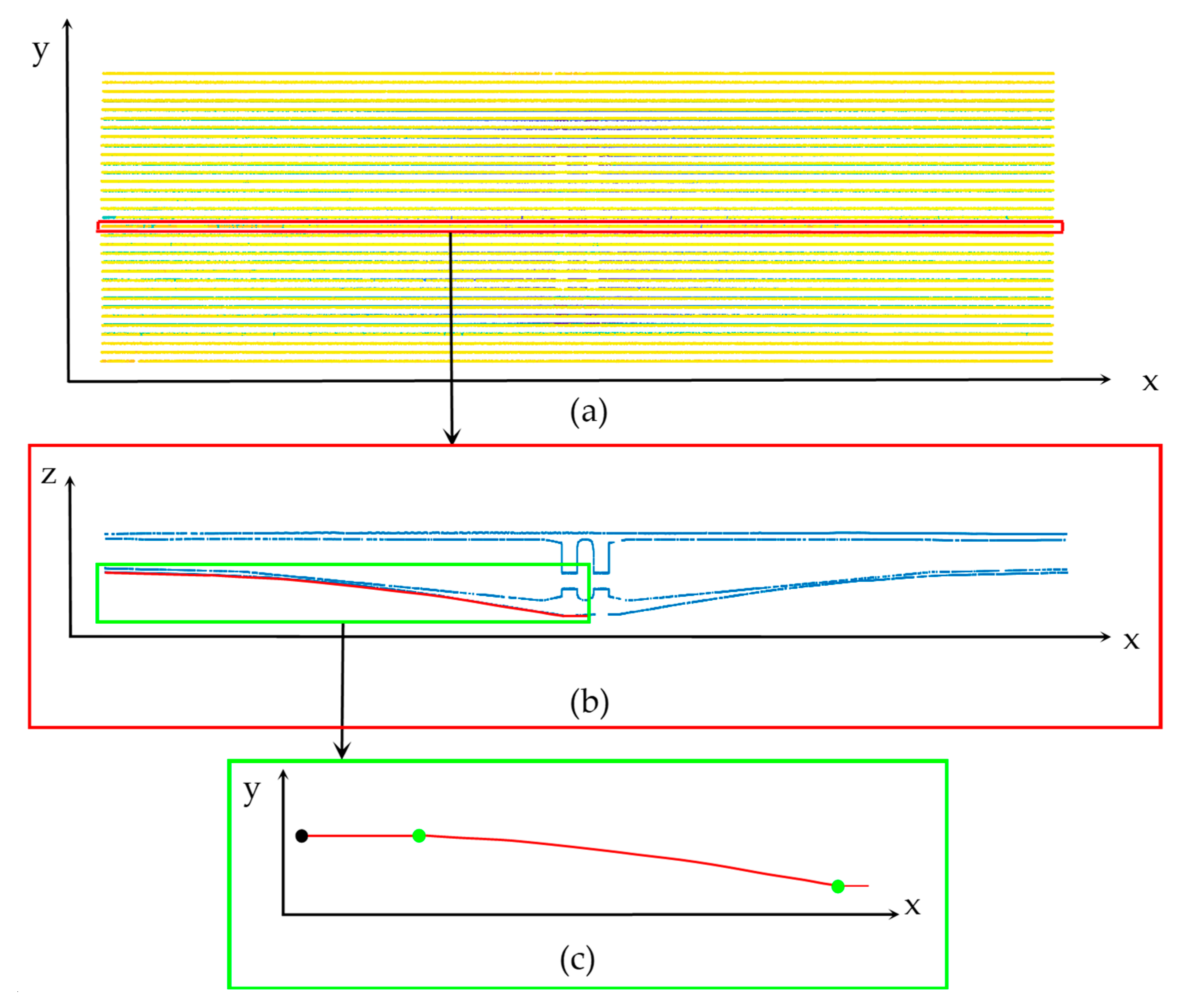
4.2.1. Point Cloud Slicing of Bridge
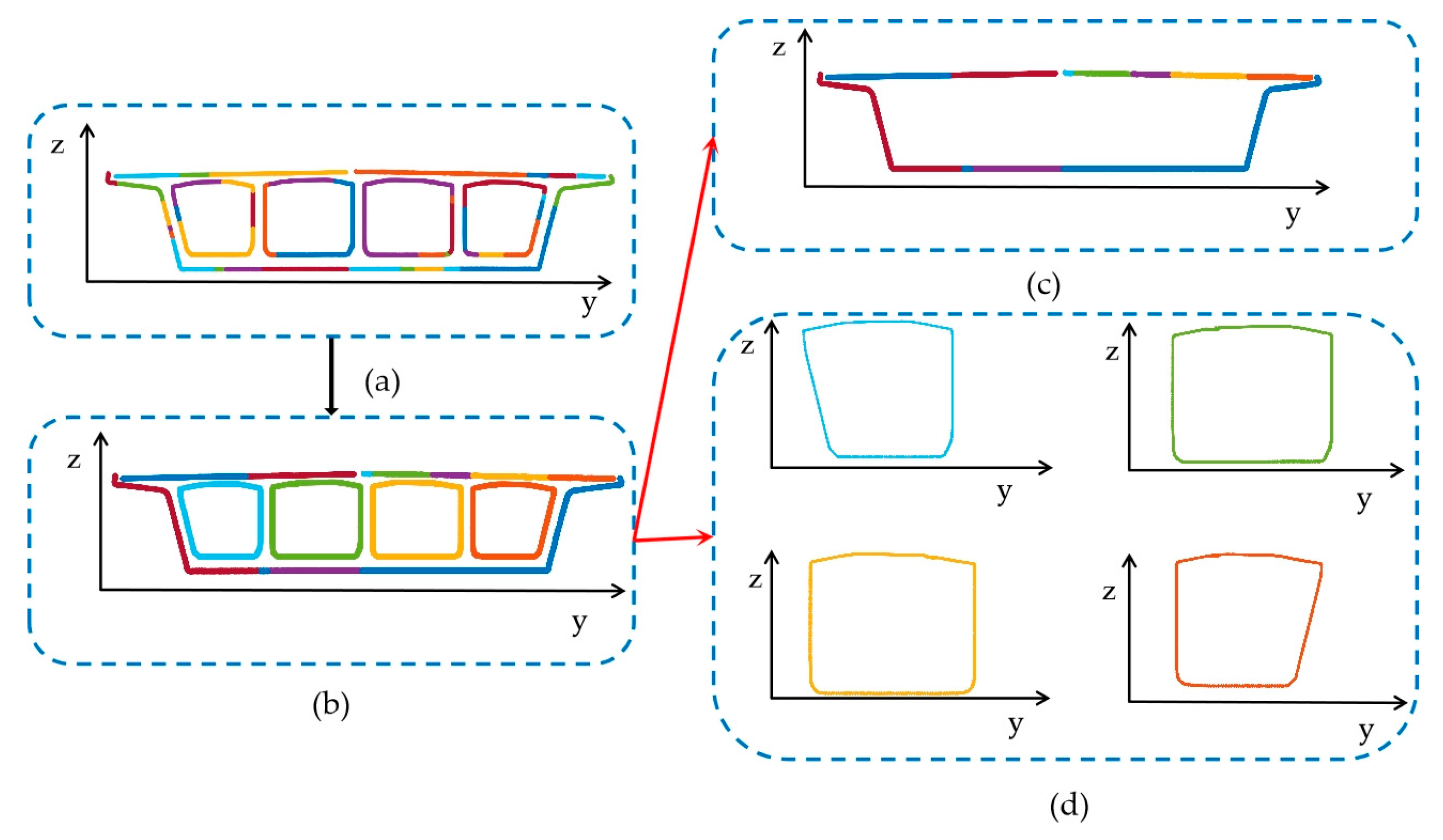
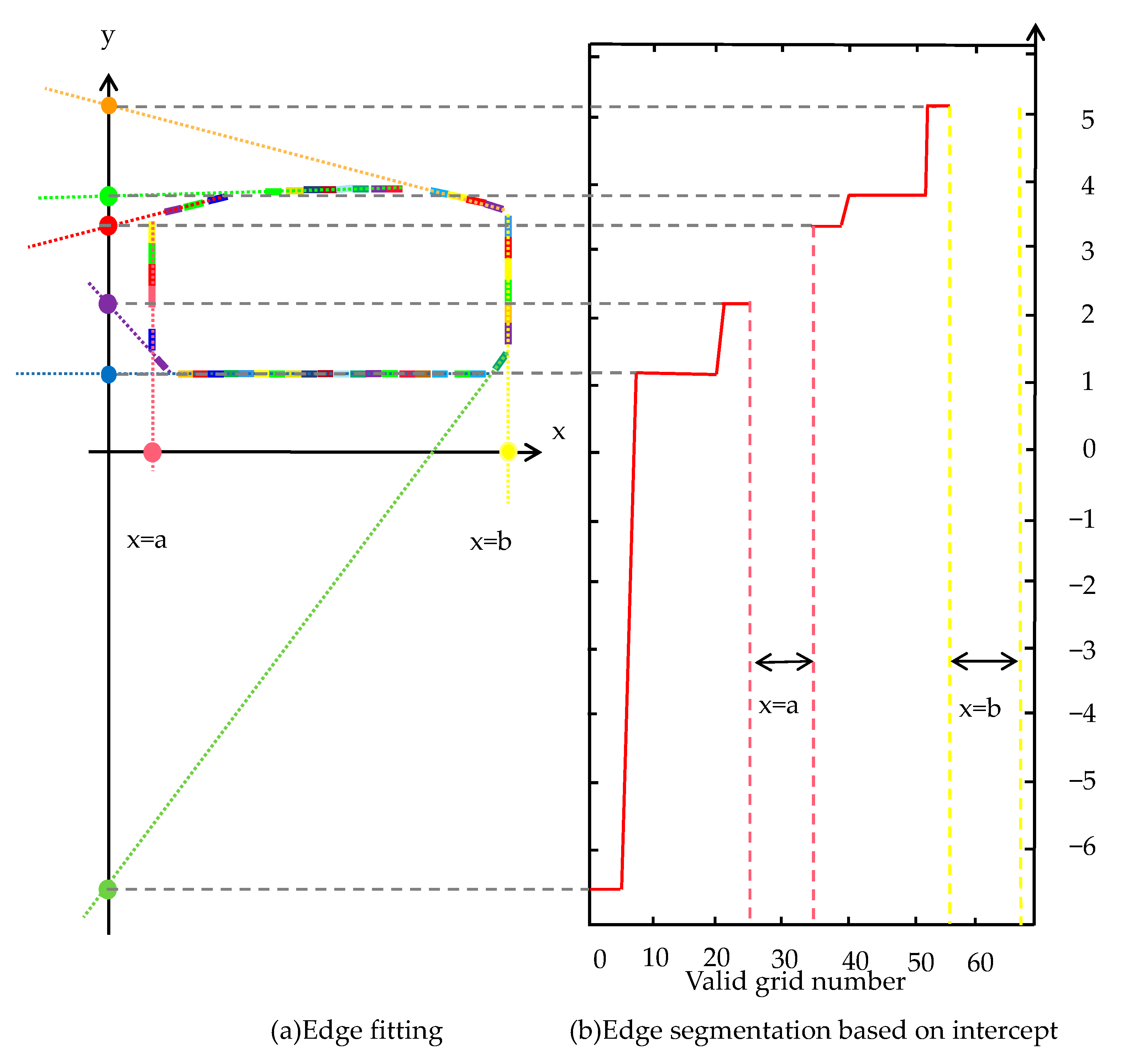
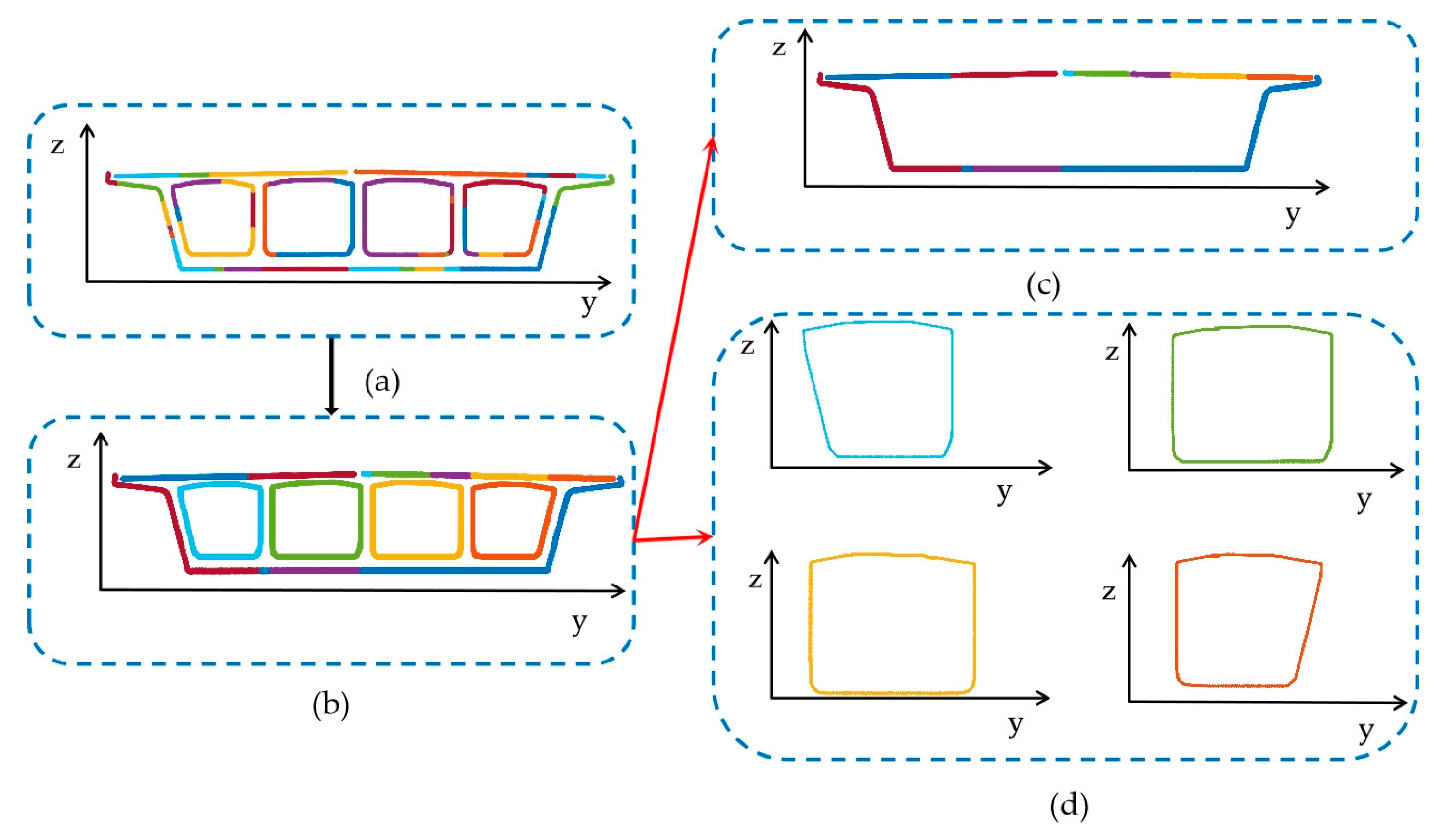
4.2.2. Point Cloud Feature Extraction
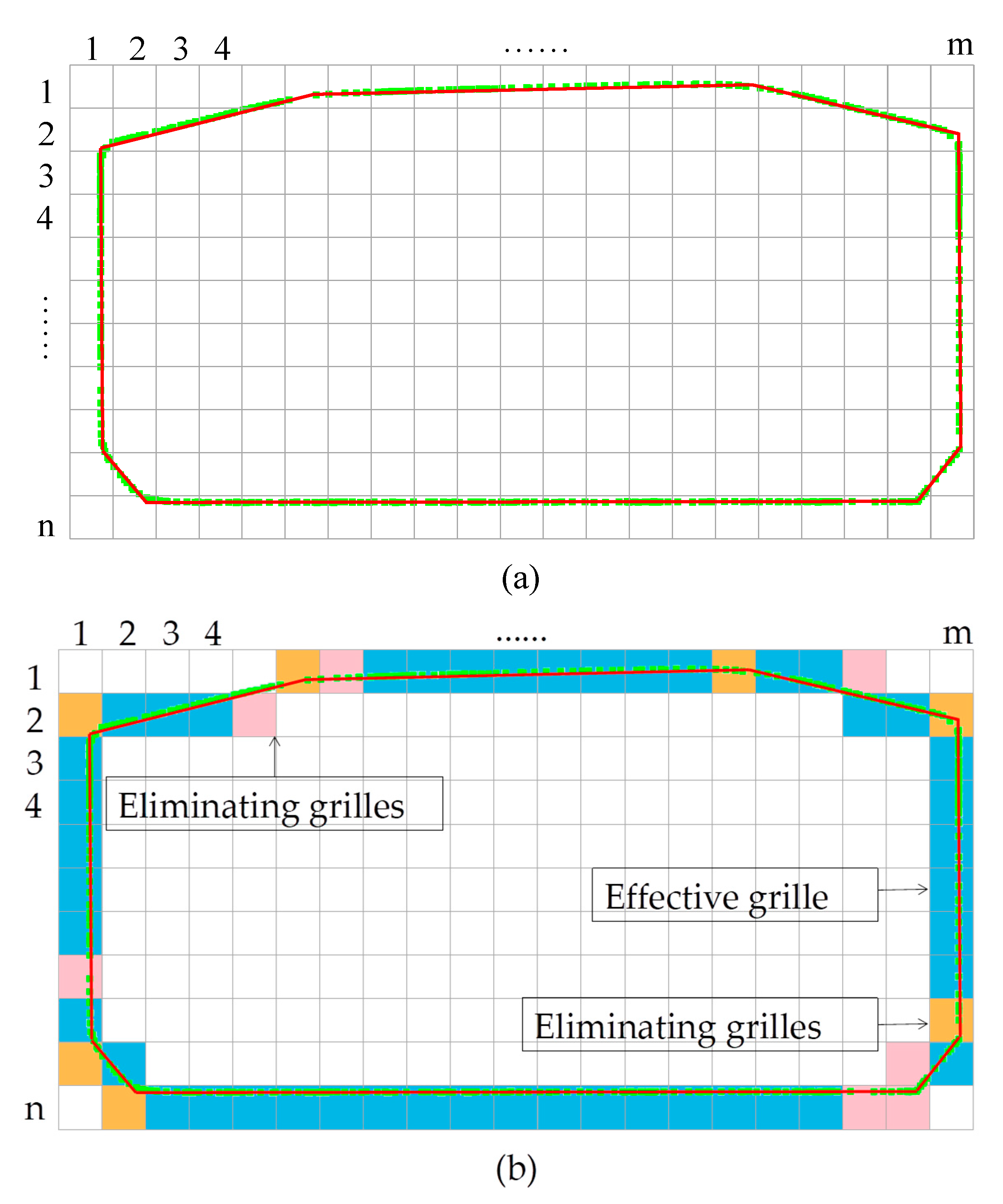
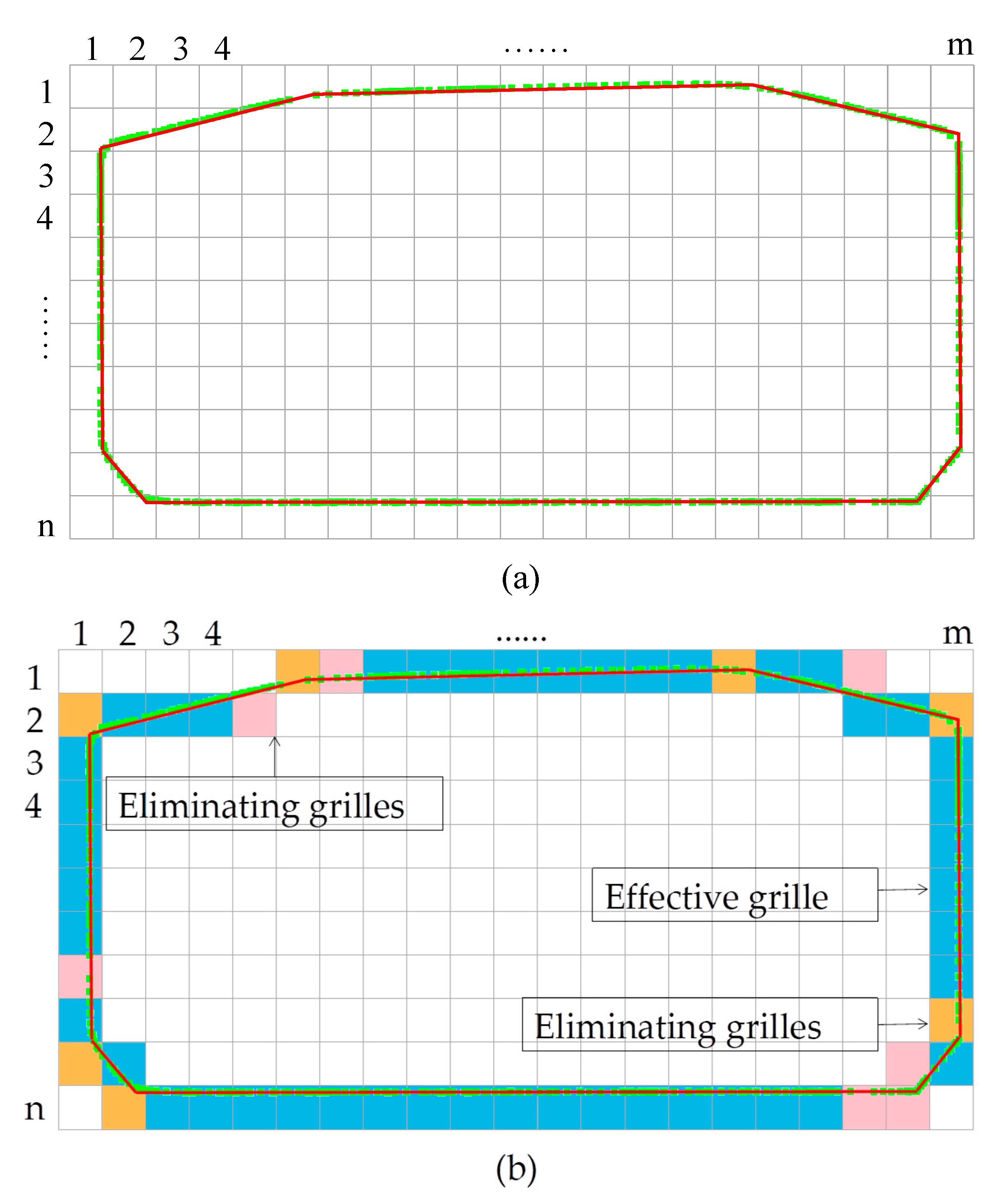
| Algorithm 1: grid segmentation algorithm |
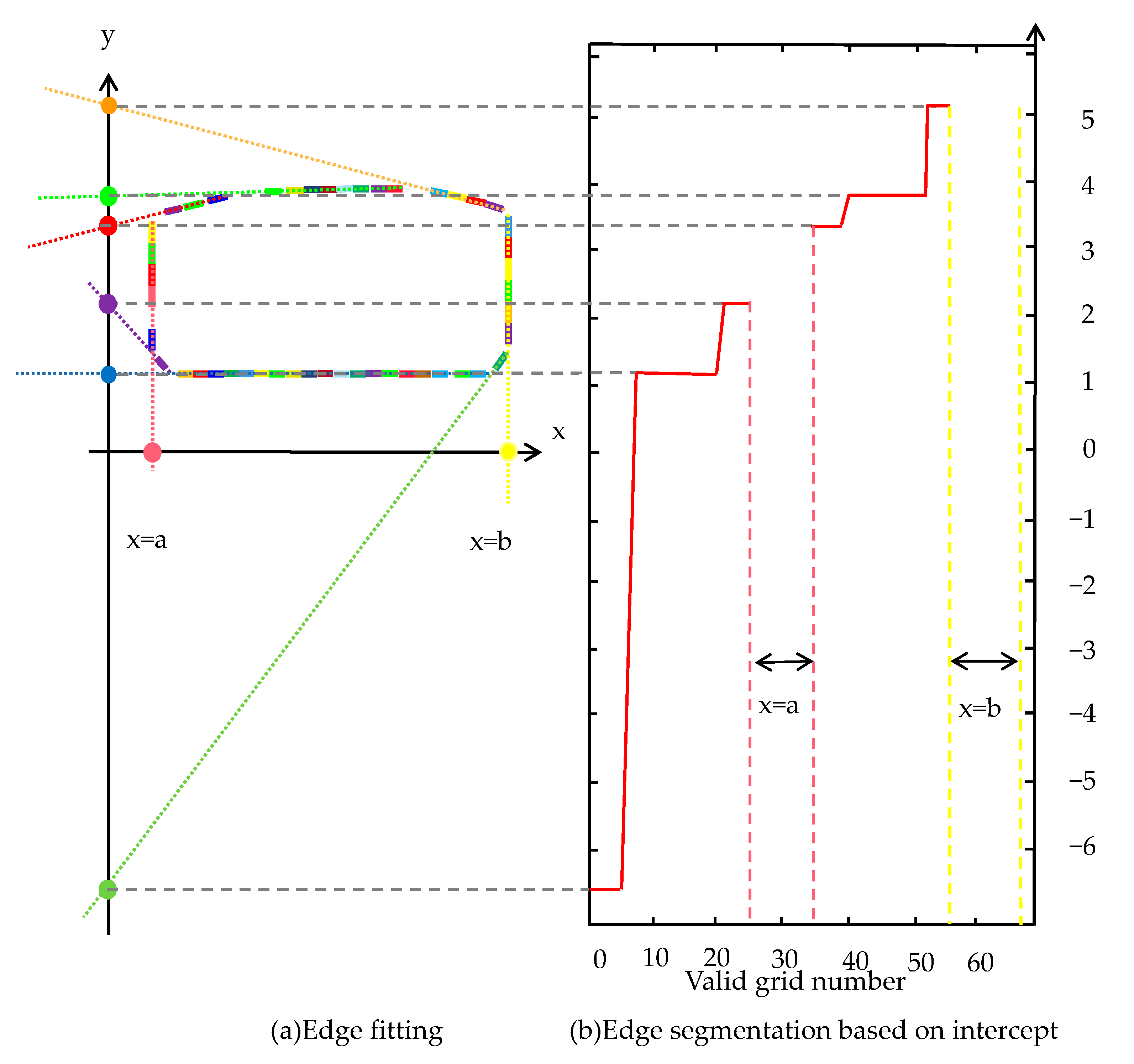
| Input: Section point cloud Datan×2; //Convert to a section point cloud on a 2D coordinate system. Output: Crosspoint 1. For i = 1:n do 2. j = x_Data(i)/d, k = y_Data(i)/d; //Calculate the coordinates of the i-th row in the grid in Data, d is the grid size. 3. Box{j, k} = Data(i); //Traverse all points in the Data and assign them to the corresponding grid. 4. End For 5. If length(Box{j, k}) > p or std(error_linefit(Box{j, k})) < q; //P is the screening condition for the number of points in the grid, and q is the screening condition for the standard deviation of line fitting residuals. 6. Box_good{m} = Box{j, k}; //Box_ Good is the effective grid point cloud stack, and the initial value of m is 1. 7. [a(m) b(m)] = linefit(Box{j, k}); //a is the slope of the grid fitting line, and b is the intercept of the grid fitting line. 8. m = m + 1; 9. End If 10. [b1 b2 b3 …br…] = Sort b; //Obtain the approximate intercept b1, b2, b3 …br… of the edge fitting line through sorting and clustering. 11. Pointcloud(r) = Box_good{find(b==br)}; //By determining whether the intercept b of any grid is merged with the approximate intercept br of the edge line, it belongs to a certain edge line grid point cloud. 12. Line(r) = Linefit(Pointcloud(r); //Accurately calculate the fitting line for each edge line. 13. Crosspoint(r) = Solve(Line(r) Line(r + 1)); //Solve the intersection points of adjacent lines in grid order. 14. End |
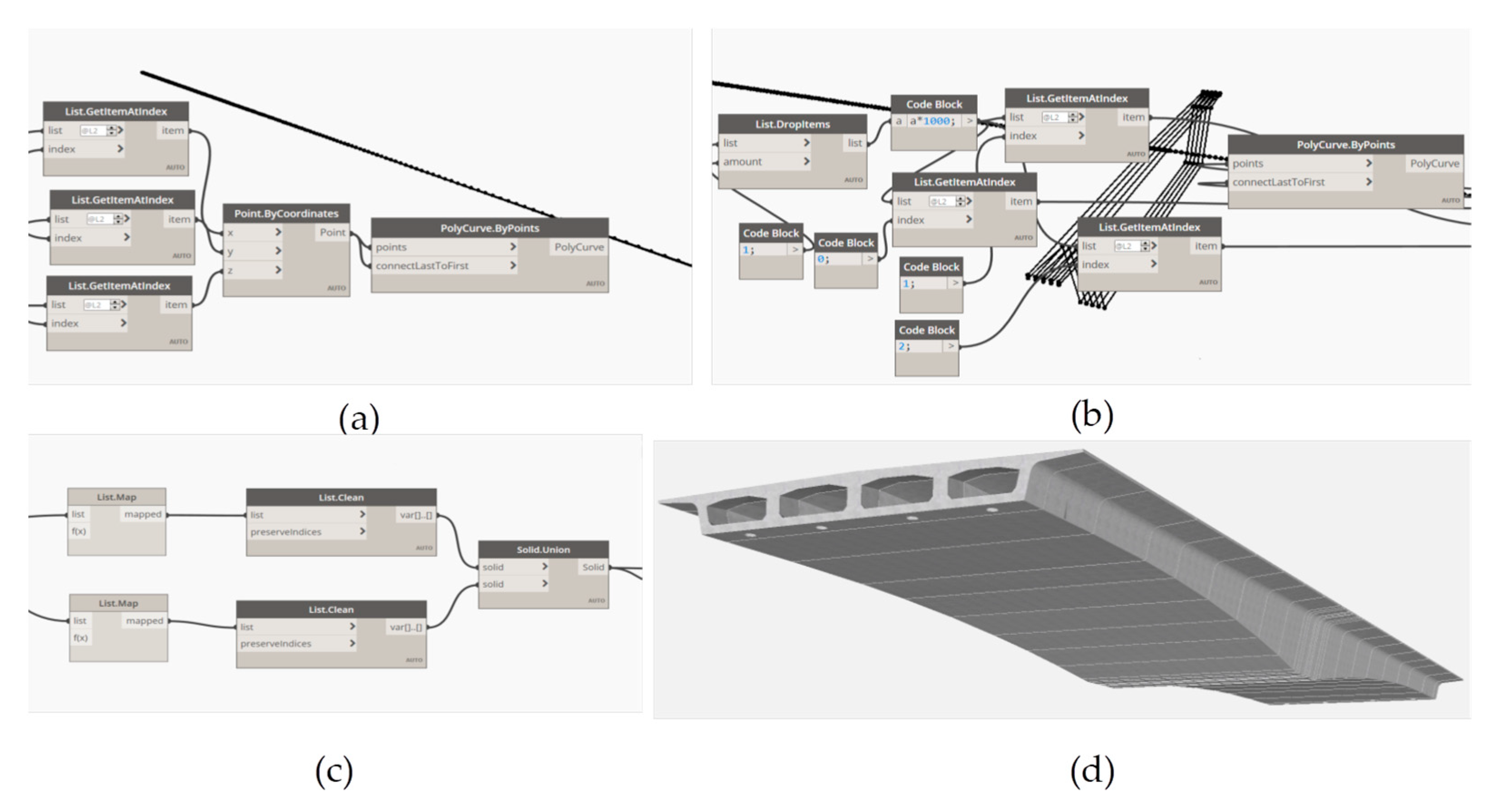
4.3. Dynamo-Revit Reverse Modelling Framework
5. Experiment
5.1. Experimental Information
5.2. Result
5.3. Discussion
6. Conclusions
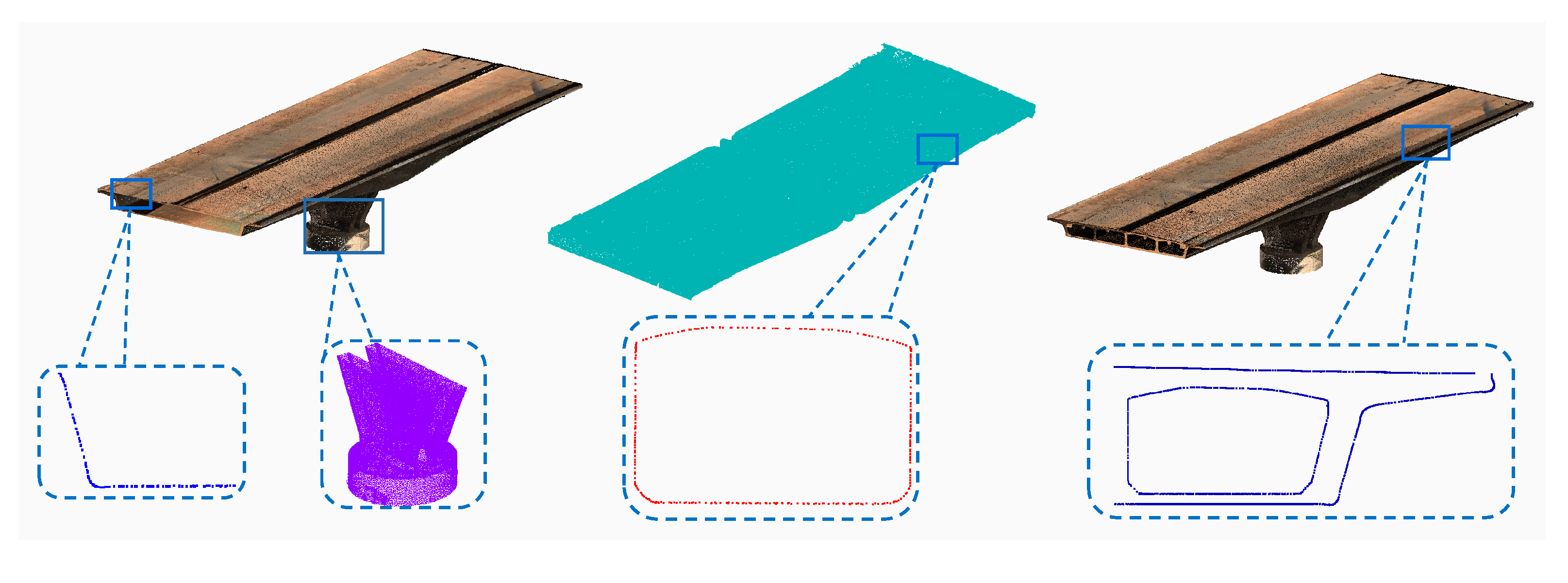
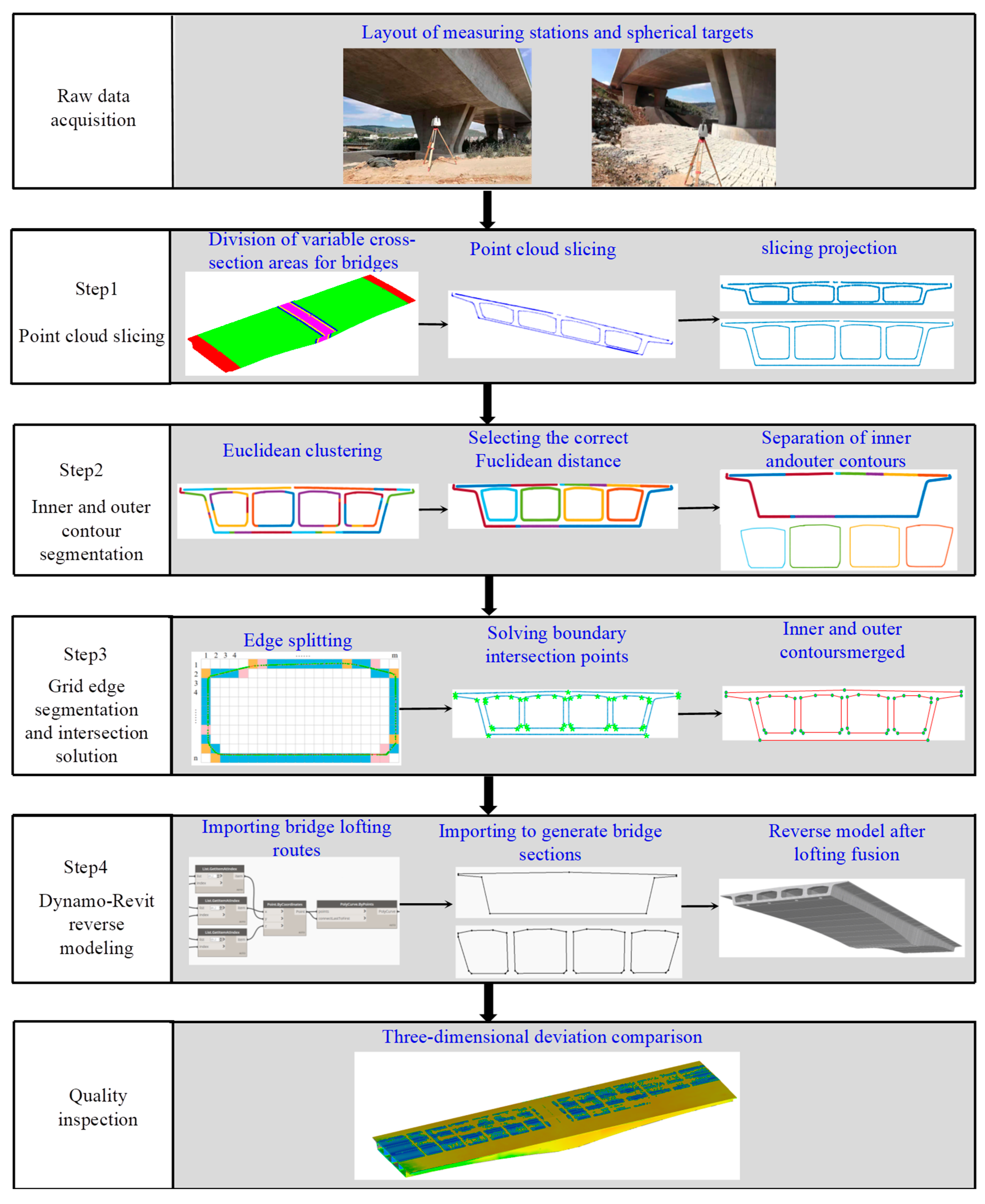
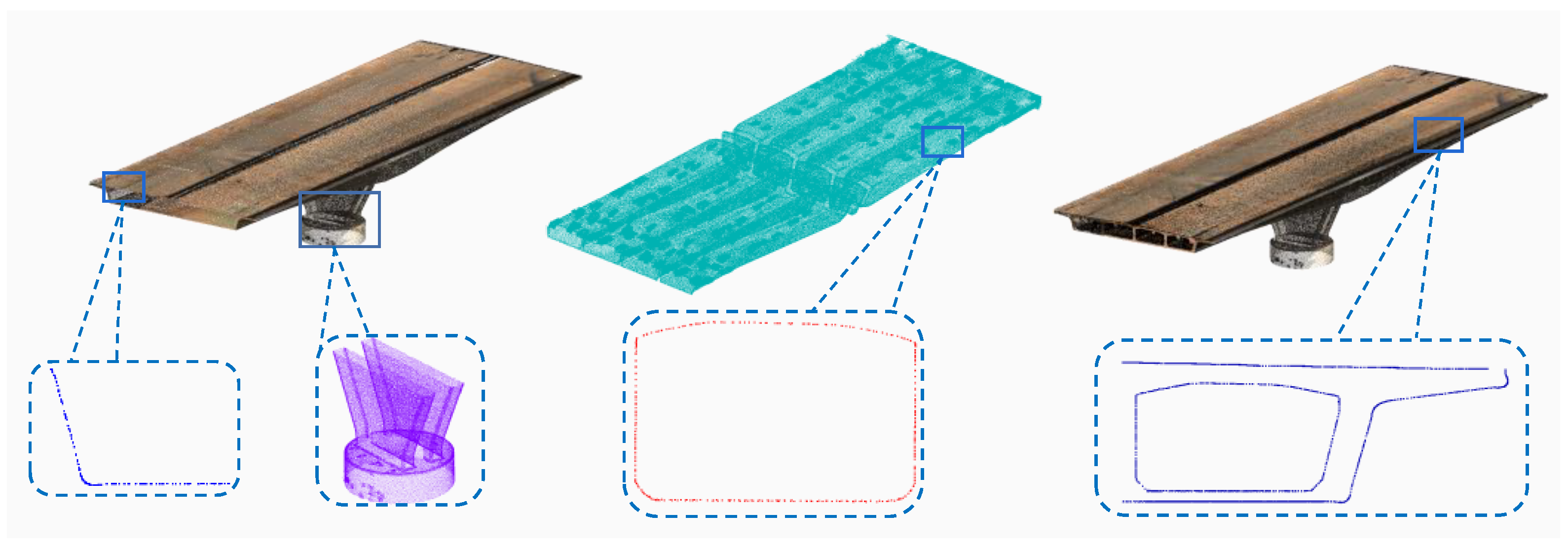
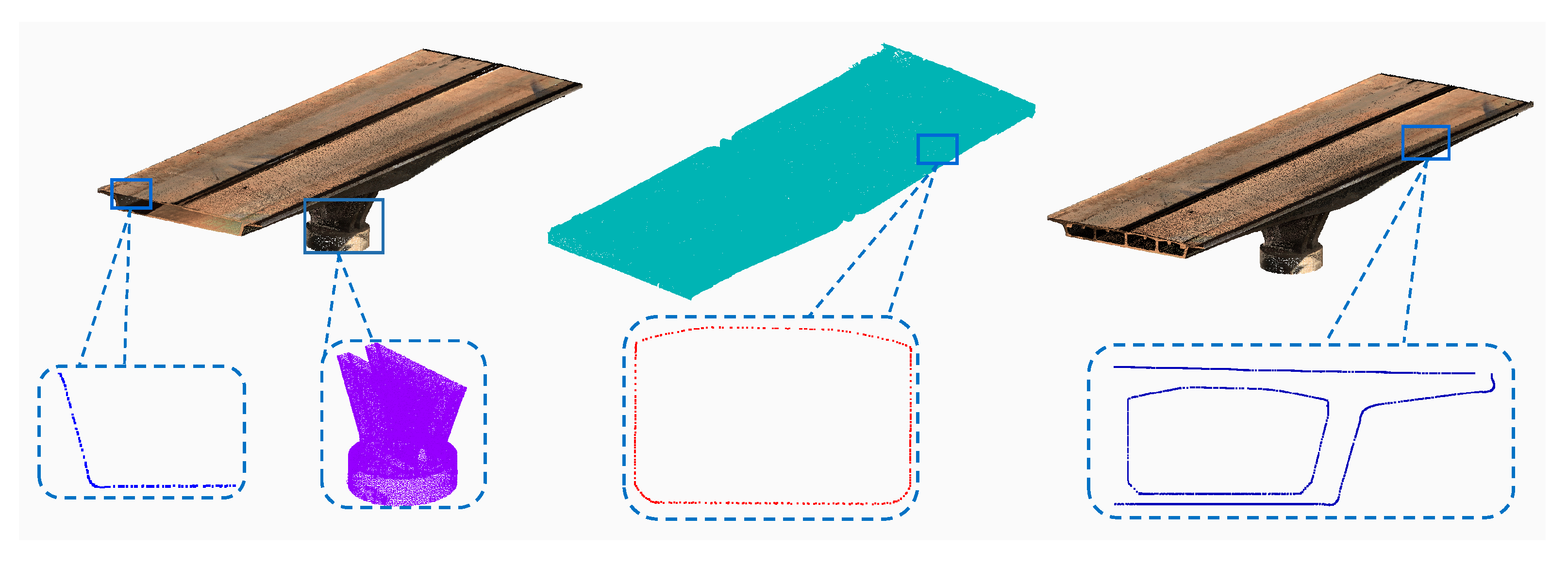
- Compared to solid section bridges, bridges with box chambers present greater challenges in point cloud data collection and registration. However, the strategic layout planning of measuring stations and targets can significantly enhance the quality and efficiency of data collection.
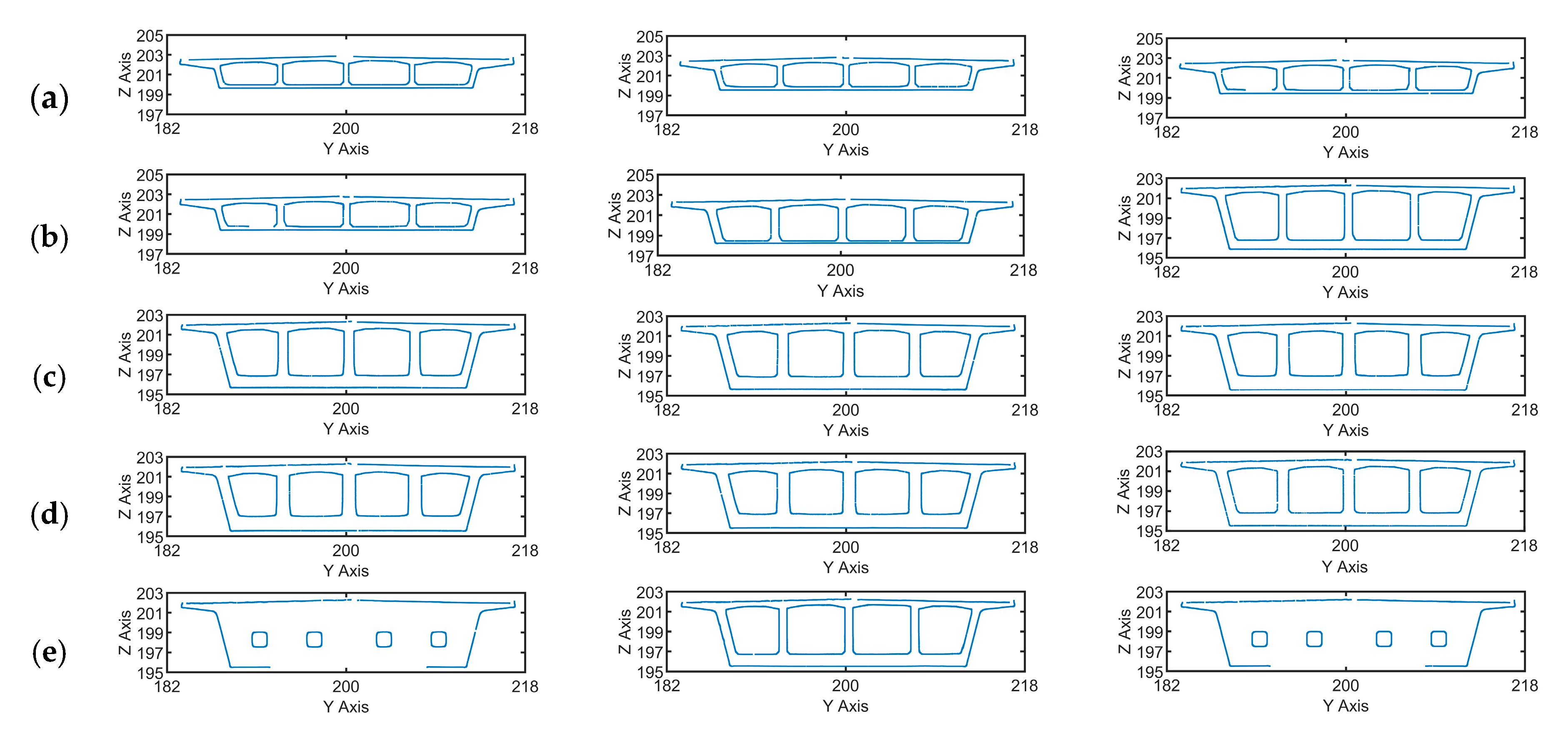
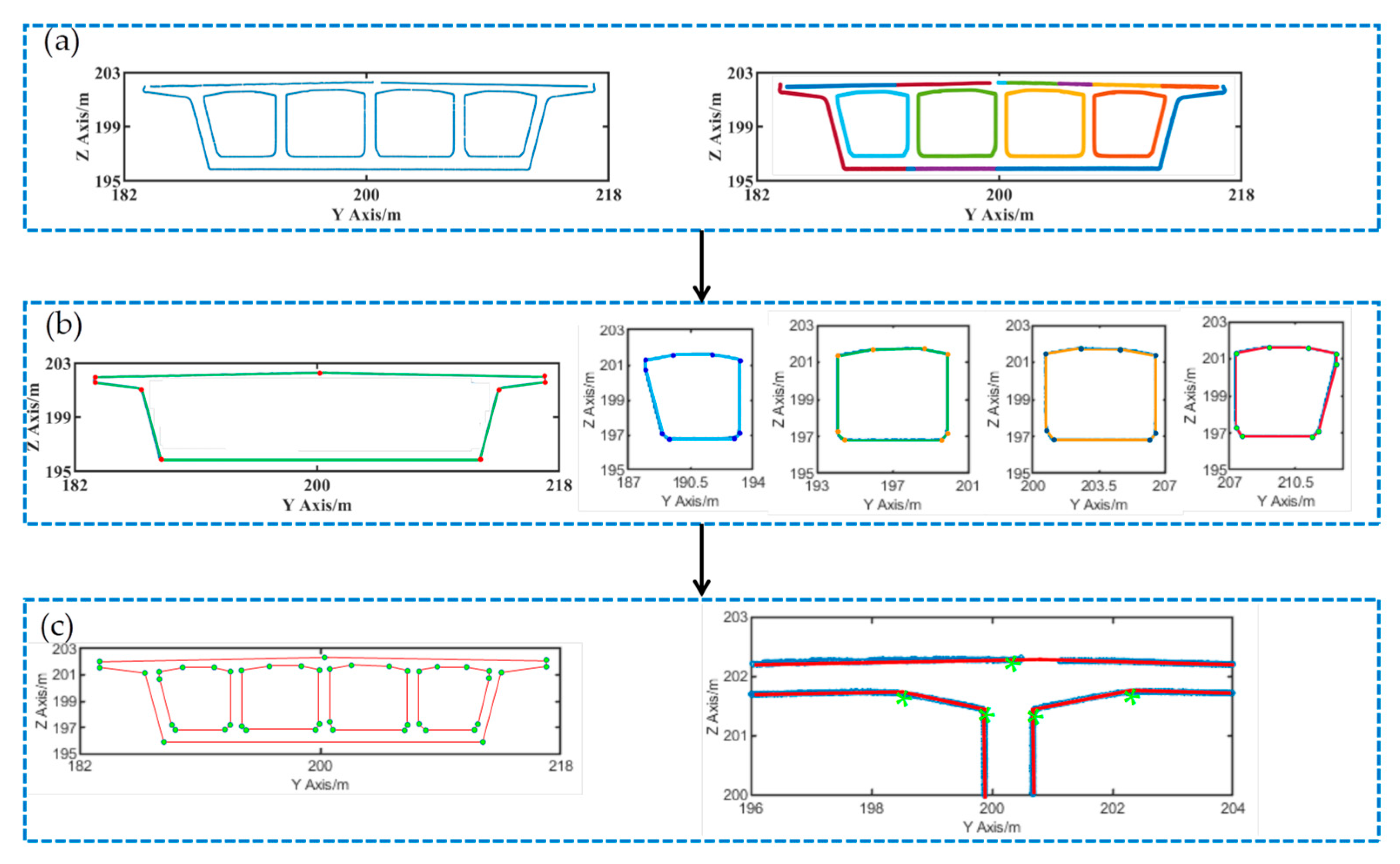
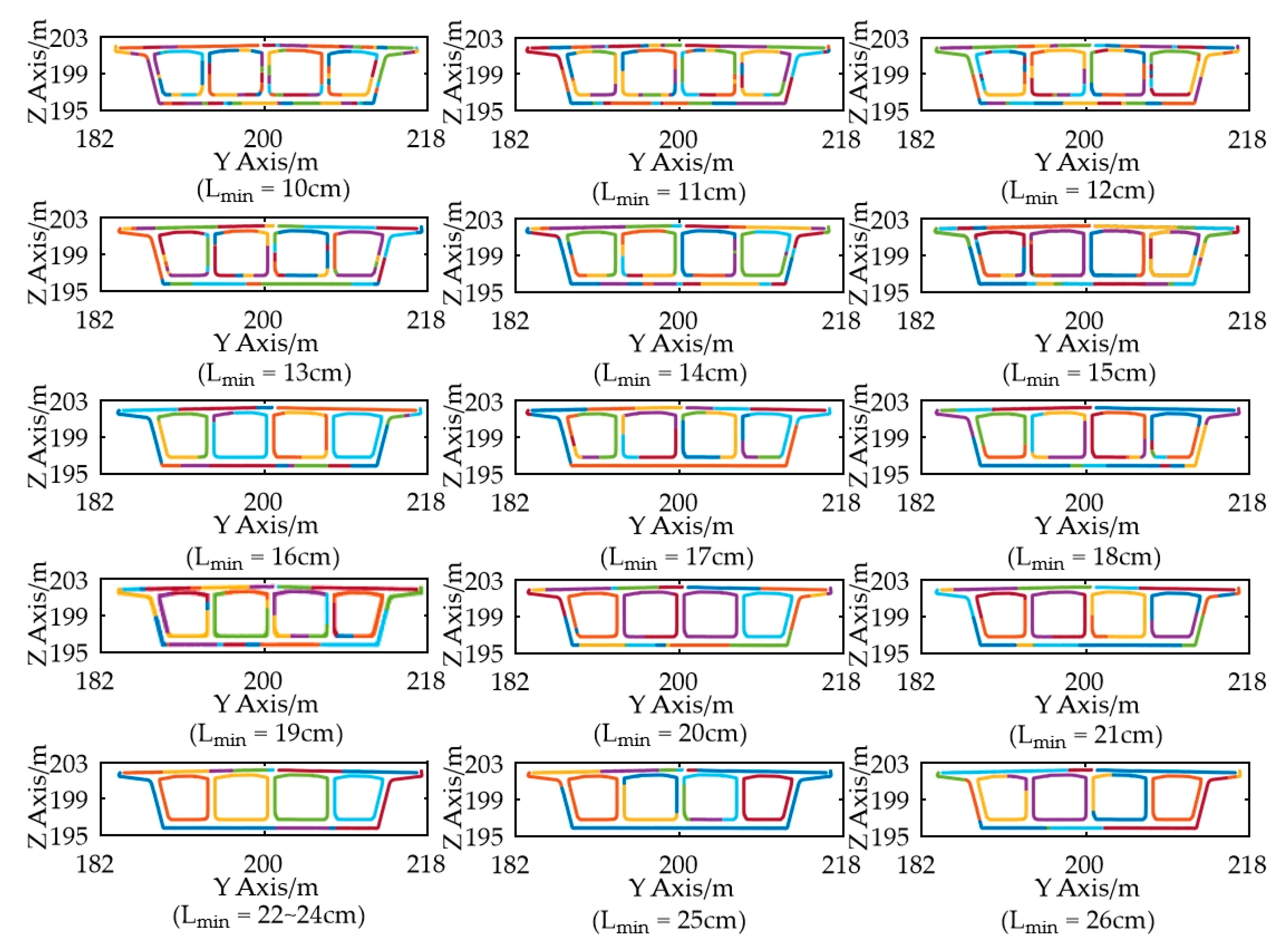
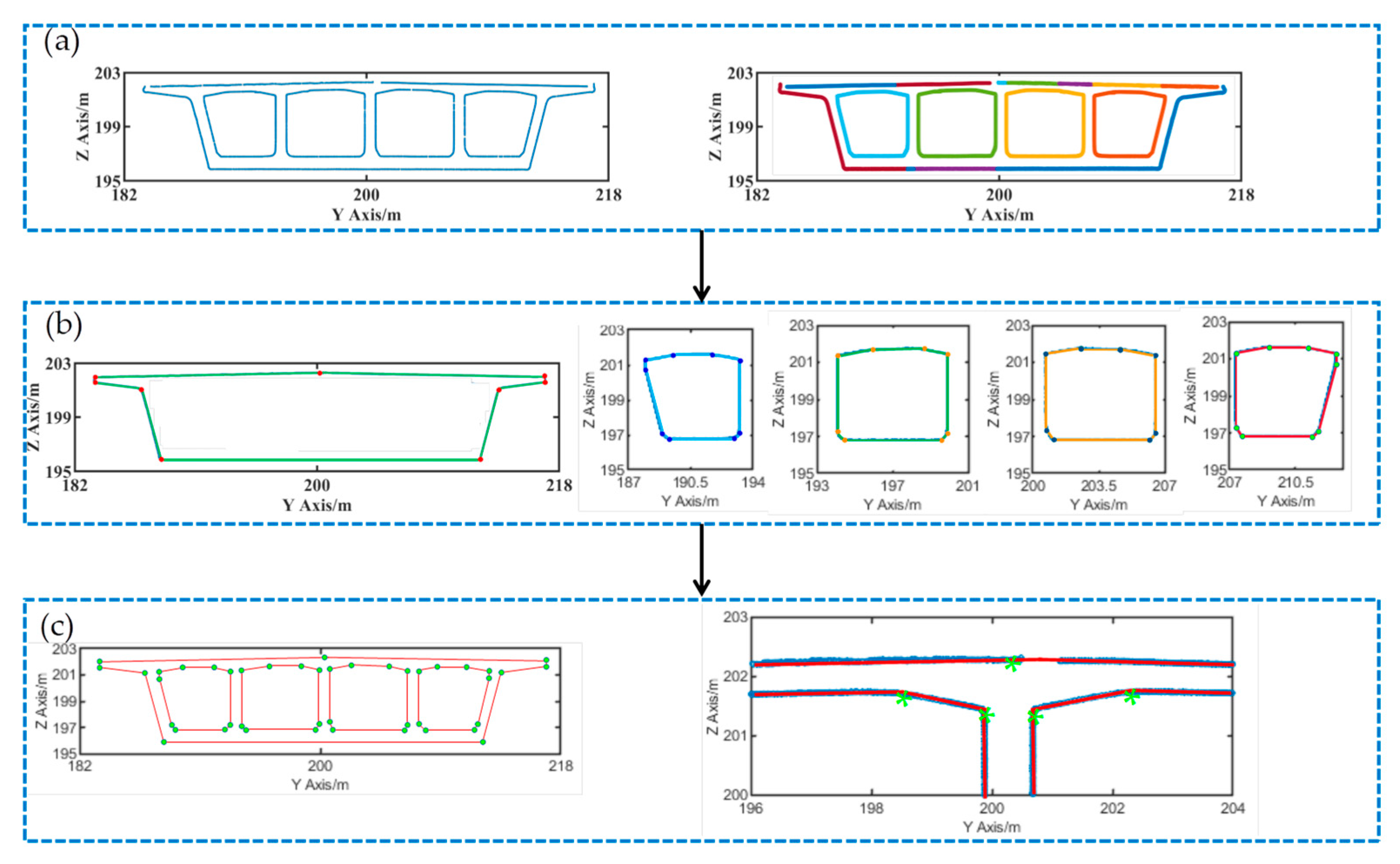
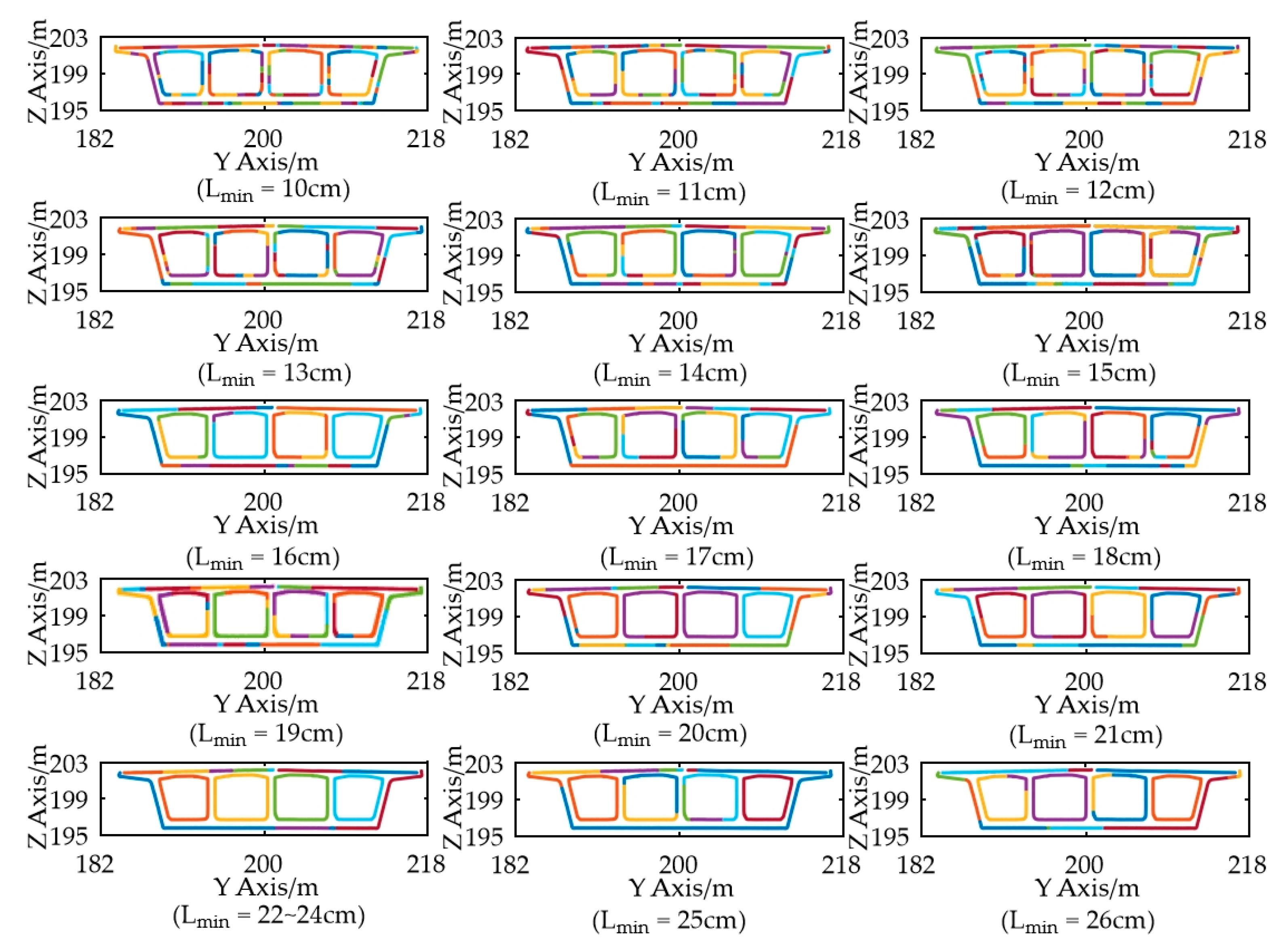
- The proposed method automates the feature extraction process from point cloud slices of the bridge box chamber contour and outer contour. This not only increases feature extraction efficiency but also ensures accurate extraction of short edges within the contour.
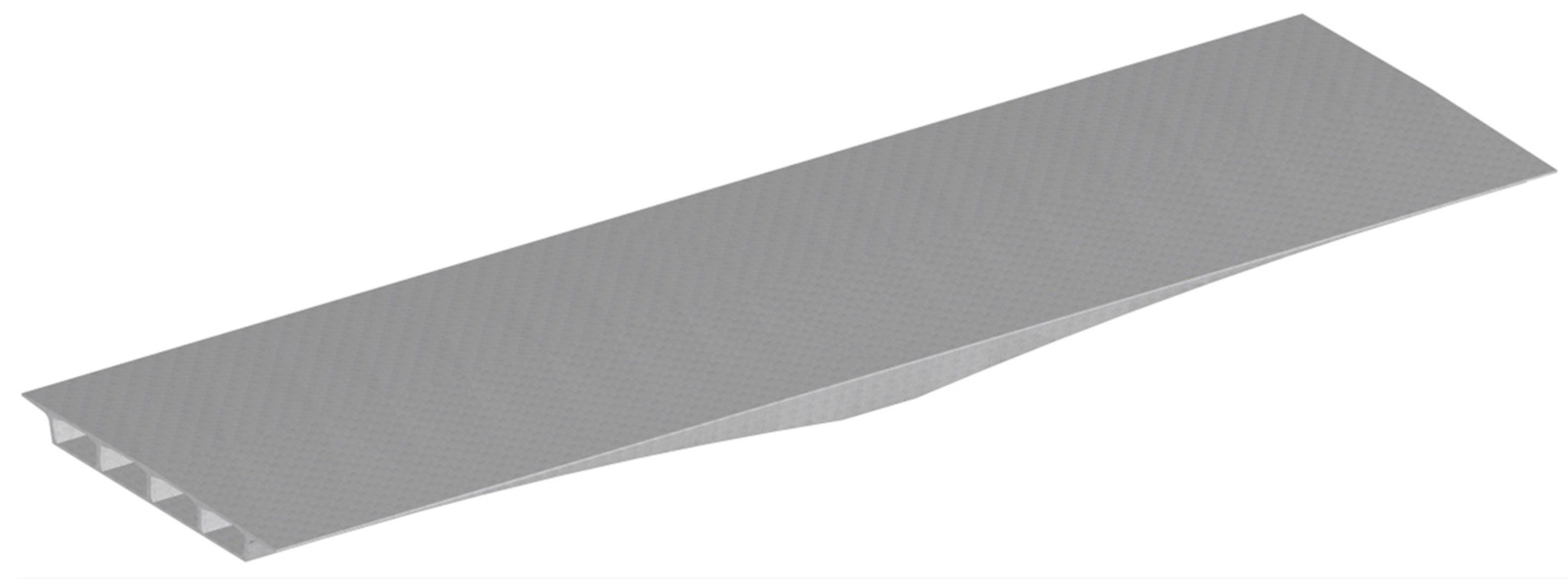
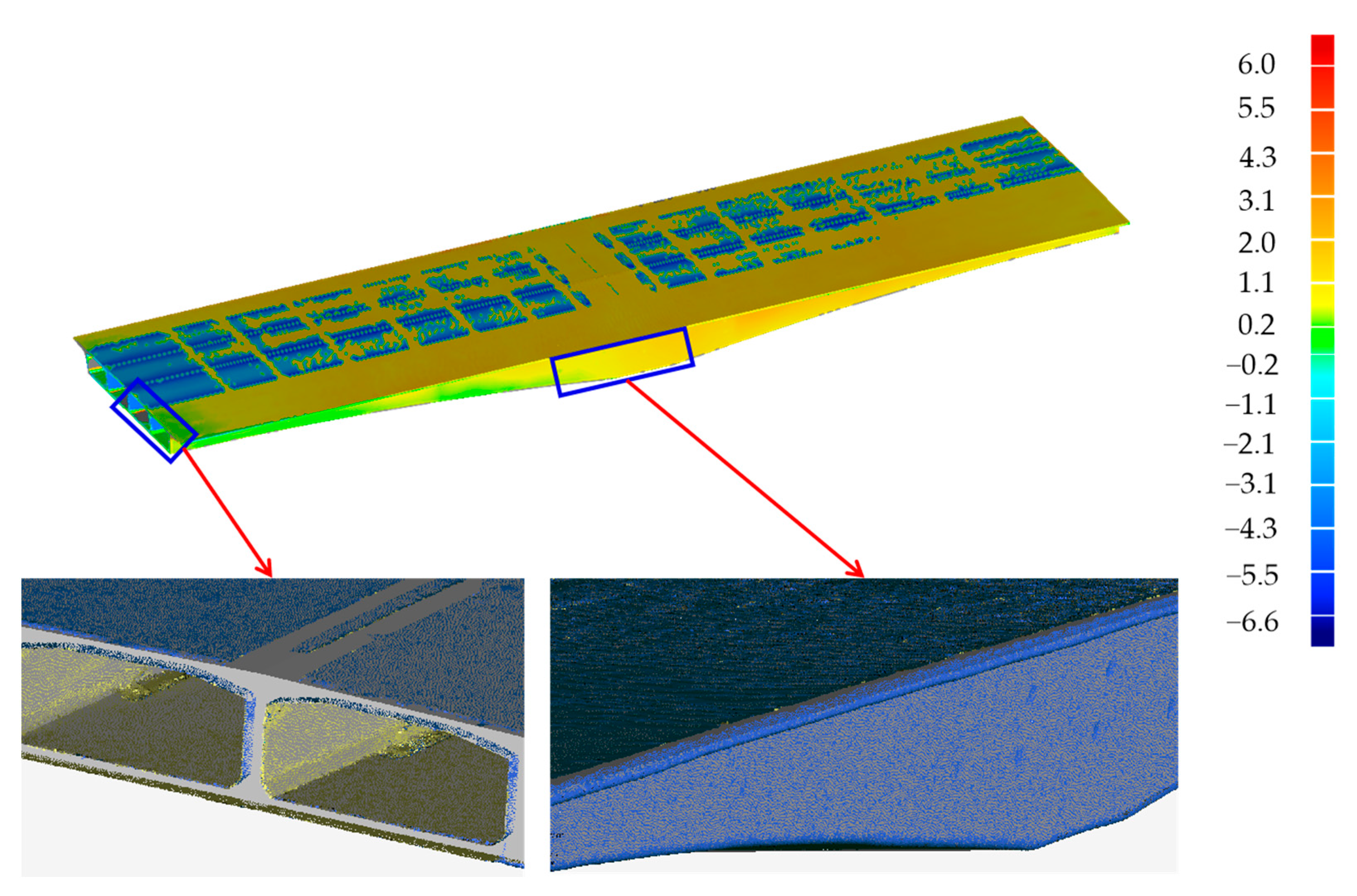
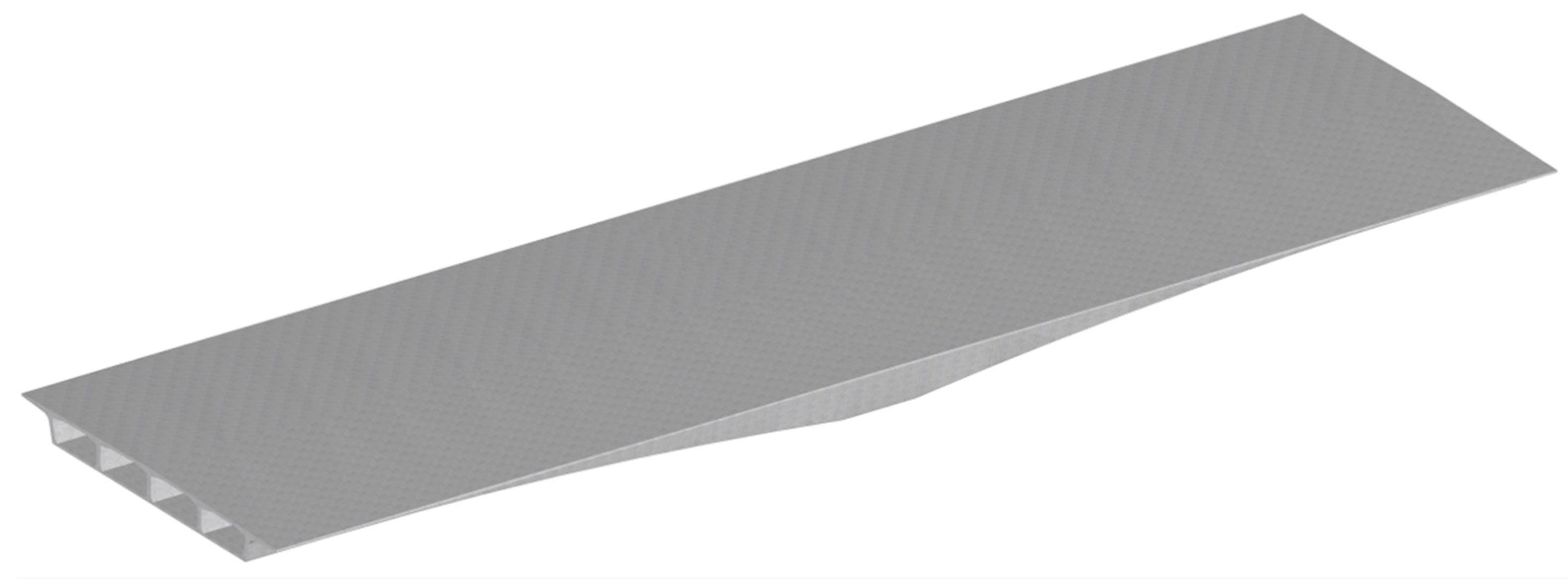
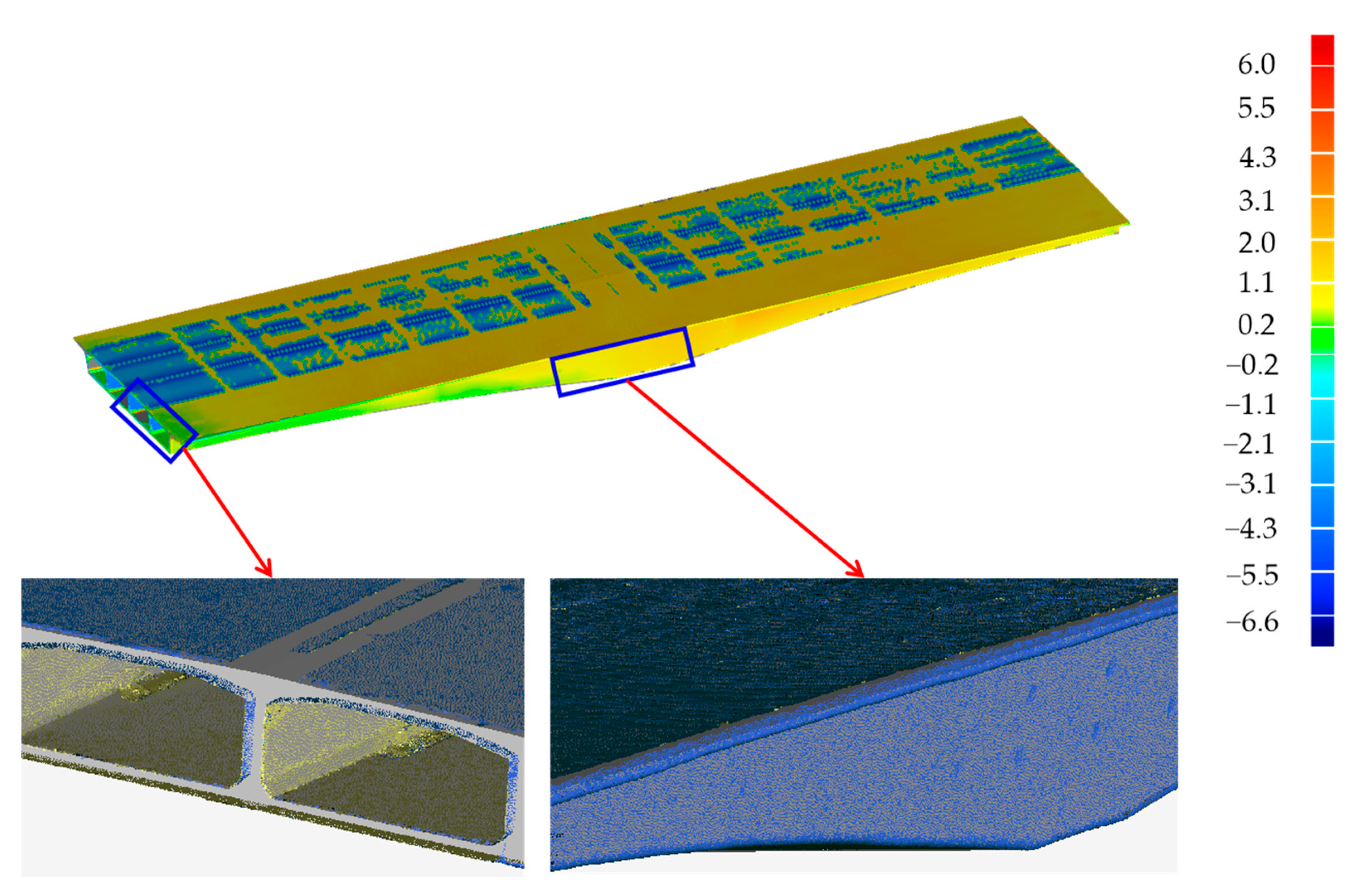
- Utilising Dynamo-Revit, the feature extraction results are directly integrated to automatically generate a bridge gDT model, thereby enhancing modelling efficiency and reducing subjective errors associated with manual operations. The accuracy of feature extraction and reverse modelling methods is confirmed through 3D deviation analysis with the measured point cloud.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stavropoulos, P.; Mourtzis, D. Chapter 10—Digital Twins in Industry 4.0. In Design and Operation of Production Networks for Mass Personalization in the Era of Cloud Technology; Mourtzis, D., Ed.; Elsevier: Amsterdam, The Netherlands, 2022; pp. 277–316. [Google Scholar]
- Zhou, C.; Xiao, D.; Hu, J.; Yang, Y.; Li, B.; Hu, S.; Demartino, C.; Butala, M. An Example of Digital Twins for Bridge Monitoring and Maintenance: Preliminary Results. In Proceedings of the 1st Conference of the European Association on Quality Control of Bridges and Structures, Padua, Italy, 29 August–1 September 2021; Springer International Publishing: Cham, Switzerland, 2022; pp. 1134–1143. [Google Scholar]
- Barazzetti, L.; Banfi, F.; Brumana, R.; Previtali, M.; Roncoroni, F. BIM from laser scans… not just for buildings: Nurbs-based parametric modeling of a medieval bridge. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-5, 51–56. [Google Scholar] [CrossRef]
- Martini, A.; Tronci, E.M.; Feng, M.Q.; Leung, R.Y. A computer vision-based method for bridge model updating using displacement influence lines. Eng. Struct. 2022, 259, 114129. [Google Scholar] [CrossRef]
- Ma, Z.; Liu, S. A review of 3D reconstruction techniques in civil engineering and their applications. Adv. Eng. Inform. 2018, 37, 163–174. [Google Scholar] [CrossRef]
- Cheng, G.; Liu, J.; Li, D.; Chen, Y.F. Semi-Automated BIM Reconstruction of Full-Scale Space Frames with Spherical and Cylindrical Components Based on Terrestrial Laser Scanning. Remote Sens. 2023, 15, 2806. [Google Scholar] [CrossRef]
- Han, Y.; Feng, D.; Wu, W.; Yu, X.; Wu, G.; Liu, J. Geometric shape measurement and its application in bridge construction based on UAV and terrestrial laser scanner. Autom. Constr. 2023, 151, 104880. [Google Scholar] [CrossRef]
- Mohammadi, M.; Rashidi, M.; Mousavi, V.; Yu, Y.; Samali, B. Application of TLS Method in Digitization of Bridge Infrastructures: A Path to BrIM Development. Remote Sens. 2022, 14, 1148. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Sadeghlou Kivi, S.; Abdolvand, M.M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens 2020, 12, 3796. [Google Scholar] [CrossRef]
- Goebbels, S. 3D Reconstruction of Bridges from Airborne Laser Scanning Data and Cadastral Footprints. J. Geovisualization Spat. Anal. 2021, 5, 10. [Google Scholar] [CrossRef]
- Hu, K.; Han, D.; Qin, G.; Zhou, Y.; Chen, L.; Ying, C.; Guo, T.; Liu, Y. Semi-automated Generation of Geometric Digital Twin for Bridge Based on Terrestrial Laser Scanning Data. Adv. Civ. Eng. 2023, 2023, 6192001. [Google Scholar] [CrossRef]
- Song, X.; Jüttler, B. Modeling and 3D object reconstruction by implicitly defined surfaces with sharp features. Comput. Graph. 2009, 33, 321–330. [Google Scholar] [CrossRef]
- Lu, R.; Brilakis, I. Digital twinning of existing reinforced concrete bridges from labelled point clusters. Autom. Constr. 2019, 105, 102837. [Google Scholar] [CrossRef]
- Kwon, S.-W.; Bosche, F.; Kim, C.; Haas, C.T.; Liapi, K.A. Fitting range data to primitives for rapid local 3D modeling using sparse range point clouds. Autom. Constr. 2004, 13, 67–81. [Google Scholar] [CrossRef]
- Oesau, S.; Lafarge, F.; Alliez, P. Indoor scene reconstruction using feature sensitive primitive extraction and graph-cut. ISPRS J. Photogramm. Remote Sens. 2014, 90, 68–82. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, C.; Tang, P. Geometry-based optimized point cloud compression methodology for construction and infrastructure management. In Proceedings of the Computing in Civil Engineering, Seattle, WA, USA, 25–27 June 2017; pp. 377–385. [Google Scholar]
- Carr, J.C.; Beatson, R.K.; McCallum, B.C.; Fright, W.R.; McLennan, T.J.; Mitchell, T.J. Smooth surface reconstruction from noisy range data. In Proceedings of the Conference on Computer Graphics and Interactive Techniques in Australasia and Southeast Asia, Melbourne, Australia, 11–14 February 2003. [Google Scholar]
- Deng, Y.; Cheng, J.C.P.; Anumba, C. Mapping between BIM and 3D GIS in different levels of detail using schema mediation and instance comparison. Autom. Constr. 2016, 67, 1–21. [Google Scholar] [CrossRef]
- Patil, A.K.; Holi, P.; Lee, S.K.; Chai, Y.H. An adaptive approach for the reconstruction and modeling of as-built 3D pipelines from point clouds. Autom. Constr. 2017, 75, 65–78. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2007; Volume 26. [Google Scholar]
- Xiao, J.; Furukawa, Y. Reconstructing the World’s Museums. Int. J. Comput. Vis. 2014, 110, 243–258. [Google Scholar] [CrossRef]
- Budroni, A.; Boehm, J. Automated 3D Reconstruction of Interiors from Point Clouds. Int. J. Archit. Comput. 2010, 8, 55–73. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Wessel, R.; Klein, R. Automatic reconstruction of parametric building models from indoor point clouds. Comput. Graph. 2016, 54, 94–103. [Google Scholar] [CrossRef]
- Borrmann, A.; Beetz, J.; Koch, C.; Liebich, T.; Muhic, S. Industry Foundation Classes: A Standardized Data Model for the Vendor-Neutral Exchange of Digital Building Models. In Building Information Modeling: Technology Foundations and Industry Practice; Borrmann, A., König, M., Koch, C., Beetz, J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 81–126. [Google Scholar]
- Dou, S.; Zhang, X.Y. Research on Generalization Technology of Spatial Line Vector Data. Appl. Mech. Mater. 2014, 687–691, 1153–1156. [Google Scholar]
- Marani, R.; Renó, V.; Nitti, M.; D’orazio, T.; Stella, E. A Modified Iterative Closest Point Algorithm for 3D Point Cloud Registration. Comput.-Aided Civ. Infrastruct. Eng. 2016, 31, 515–534. [Google Scholar] [CrossRef]
- Wang, X.; Chen, H.; Wu, L. Feature extraction of point clouds based on region clustering segmentation. Multimed. Tools Appl. 2020, 79, 11861–11889. [Google Scholar] [CrossRef]
- Lee, K.-H.; Woo, H. Direct integration of reverse engineering and rapid prototyping. Comput. Ind. Eng. 2000, 38, 21–38. [Google Scholar] [CrossRef]
- Qiu, Y.; Zhou, X.; Qian, X. Direct slicing of cloud data with guaranteed topology for rapid prototyping. Int. J. Adv. Manuf. Technol. 2011, 53, 255–265. [Google Scholar] [CrossRef]
- Wu, Y.F.; Wong, Y.S.; Loh, H.T.; Zhang, Y. Modelling cloud data using an adaptive slicing approach. Comput. Aided Des. 2004, 36, 231–240. [Google Scholar] [CrossRef]
- Tang, J.; Tan, J.; Du, Y.; Zhao, H.; Li, S.; Yang, R.; Zhang, T.; Li, Q. Quantifying Multi-Scale Performance of Geometric Features for Efficient Extraction of Insulators from Point Clouds. Remote Sens. 2023, 15, 3339. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiang, Z.; Zhang, X.; Wang, Y.; Han, D.; Ying, C. Mechanical state inversion method for structural performance evaluation of existing suspension bridges using 3D laser scanning. Comput.-Aided Civ. Infrastruct. Eng. 2021, 37, 650–665. [Google Scholar] [CrossRef]
- Zolanvari, S.M.I.; Laefer, D.F. Slicing Method for curved façade and window extraction from point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 119, 334–346. [Google Scholar] [CrossRef]
- Luo, T.; Lian, Z.; Yu, H.; Liu, Y.; Li, B.-S. Reverse design based on slicing method. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 541. [Google Scholar] [CrossRef]
- Wang, B.; Yin, C.; Luo, H.; Cheng, J.C.P.; Wang, Q. Fully automated generation of parametric BIM for MEP scenes based on terrestrial laser scanning data. Autom. Constr. 2021, 125, 103615. [Google Scholar] [CrossRef]
- Zhao, J.; Cui, Y.; Niu, X.; Wang, X.R.; Zhao, Y.; Guo, M.; Zhang, R.B. Point cloud slicing-based extraction of indoor components. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 103–108. [Google Scholar] [CrossRef]
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Zhou, Y.; Han, D.; Hu, K.; Qin, G.; Xiang, Z.; Ying, C.; Zhao, L.; Hu, X. Accurate Virtual Trial Assembly Method of Prefabricated Steel Components Using Terrestrial Laser Scanning. Adv. Civ. Eng. 2021, 2021, 9916859. [Google Scholar] [CrossRef]
- Qin, G.; Zhou, Y.; Hu, K.; Han, D.; Ying, C. Automated Reconstruction of Parametric BIM for Bridge Based on Terrestrial Laser Scanning Data. Adv. Civ. Eng. 2021, 2021, 8899323. [Google Scholar] [CrossRef]
- Agapaki, E.; Brilakis, I. State-of-Practice on As-Is Modelling of Industrial Facilities. In Workshop of the European Group for Intelligent Computing in Engineering; Springer International Publishing: Cham, Switzerland, 2018; pp. 103–124. [Google Scholar]
- Son, H.; Bosché, F.; Kim, C. As-built data acquisition and its use in production monitoring and automated layout of civil infrastructure: A survey. Adv. Eng. Inform. 2015, 29, 172–183. [Google Scholar] [CrossRef]
- Macher, H.; Landes, T.; Grussenmeyer, P. From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings. Appl. Sci 2017, 7, 1030. [Google Scholar] [CrossRef]
- Azhar, S.; Khalfan, M.M.A.; Maqsood, T. Building information modelling (BIM): Now and beyond. Australas. J. Constr. Econ. Build. 2012, 12, 15–28. [Google Scholar] [CrossRef]
- Gao, T.; Akinci, B.; Ergan, S.; Garrett, J.H. Constructing as-is BIMs from progressive scan data. Gerontechnology 2012, 11, 75. [Google Scholar]
- Li, S.; Isele, J.; Bretthauer, G. Proposed Methodology for Generation of Building Information Model with Laserscanning. Tsinghua Sci. Technol. 2008, 13, 138–144. [Google Scholar] [CrossRef]
- Fang, W.; Huang, X.; Zhang, F.; Li, D. Intensity correction of terrestrial laser scanning data by estimating laser transmission function. IEEE Trans. Geosci. Remote Sens. 2015, 53, 942–951. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric calibration of terrestrial laser scanners with external reference targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Zhou, Y.; Xiang, Z.; Zhao, L.; Chen, G.; Li, T.; Zhu, J.; Hu, K. Fast and Accurate Generation Method of Geometric Digital Twin Model of RC Bridge with Box Chambers Based on Terrestrial Laser Scanning. Remote Sens. 2023, 15, 4440. https://doi.org/10.3390/rs15184440
Hu G, Zhou Y, Xiang Z, Zhao L, Chen G, Li T, Zhu J, Hu K. Fast and Accurate Generation Method of Geometric Digital Twin Model of RC Bridge with Box Chambers Based on Terrestrial Laser Scanning. Remote Sensing. 2023; 15(18):4440. https://doi.org/10.3390/rs15184440
Chicago/Turabian StyleHu, Guotao, Yin Zhou, Zhongfu Xiang, Lidu Zhao, Guicheng Chen, Tao Li, Jinyu Zhu, and Kaixin Hu. 2023. "Fast and Accurate Generation Method of Geometric Digital Twin Model of RC Bridge with Box Chambers Based on Terrestrial Laser Scanning" Remote Sensing 15, no. 18: 4440. https://doi.org/10.3390/rs15184440
APA StyleHu, G., Zhou, Y., Xiang, Z., Zhao, L., Chen, G., Li, T., Zhu, J., & Hu, K. (2023). Fast and Accurate Generation Method of Geometric Digital Twin Model of RC Bridge with Box Chambers Based on Terrestrial Laser Scanning. Remote Sensing, 15(18), 4440. https://doi.org/10.3390/rs15184440