1. Introduction
Synthetic aperture radar (SAR) is capable of working in all-day and all-weather conditions [
1]. It has become the mainstream microwave remote sensing tool and is widely applied in disaster evaluation [
2,
3,
4,
5] and terrain classification [
6,
7,
8,
9]. Polarimetric SAR is a type of SAR that transmits and receives electromagnetic waves in multiple polarization states. It provides additional information about the scattering mechanisms of targets, which enables it to distinguish between different types of scatterers, such as vegetation, water, and urban areas [
2,
3,
4,
5,
6,
7,
8,
9]. Based on different polarization transmission and reception configurations, some of the most common polarimetric SAR modes include:
(1) Single polarization: In this mode, the SAR system transmits and receives signals in a single-polarization state, either horizontal (HH) or vertical (VV);
(2) Dual polarization: In this mode, the SAR system transmits and receives signals in two polarization states, either horizontal-transmitting (HH-VH) or vertical-transmitting (VV-HV);
(3) Quad polarization: In this mode, the SAR system transmits and receives signals in all four polarization states, including both horizontal and vertical polarizations;
(4) Compact polarimetry: In this mode, the SAR system transmits and receives signals in a combination of horizontal and vertical polarizations, which can be viewed as a special category of the dual-pol SAR mode.
In the above four polarimetric modes, the single-polarization SAR mode has the least amount of scattering information of targets, while the dual-pol SAR mode can provide more target-scattering information than the single-polarization SAR mode. Compared with the dual-pol SAR mode, the quad-pol SAR mode provides the most detailed and accurate information of targets and is suitable for various applications, such as land-cover classification [
6,
7,
8]. However, the relatively narrow observation swath and higher system complexity restricts the applications of the quad-pol SAR mode. In this vein, to integrate the strengths of the dual-pol and quad-pol SAR modes, we can reconstruct the quad-pol SAR data from the dual-pol SAR mode, and the reconstruction advantages are twofold. On the one hand, complete scattering information can be obtained to extend the applications of dual-pol SAR data. On the other hand, the observation swath is enlarged compared with the real quad-pol SAR data.
For quad-pol SAR data, the fully polarimetric information can be represented by 3 × 3 polarimetric covariance matrices. Principally, the nine real elements of the polarimetric covariance matrix have intrinsic physical relationships for certain targets [
2,
3]. If such latent relationships are estimated, the quad-pol SAR data can be reconstructed from dual-pol SAR data. Recently, a series of methods have been proposed to obtain quad-pol SAR data from the dual-pol SAR mode [
10,
11,
12]. In [
11], a regression model was developed to predict the VV component based on the linear relationship among the HH, HV, and VV components in the dual-pol SAR data. To improve the sea-ice-detection performance of dual-pol SAR data, some specific quad-pol SAR features are simulated from dual-pol SAR data via a machine learning approach [
12]. Compact polarization, as a special form of dual polarization, mainly includes the pi/4 mode [
13], dual-circular polarimetry (DCP) [
14], and circular-transmit and linear-receive (CTLR) modes [
15,
16]. Pseudo-quad-pol SAR data can be reconstructed from compact-pol SAR data by utilizing the assumption of reflection symmetry and the relationship between the magnitude of the linear coherence and cross-pol ratio [
13,
14,
15,
16]. For instance, Souyris et al. proposed the polarimetric interpolation model to reconstruct the quad-pol SAR data, which is specific to the pi/4 compact-polarization mode [
13]. Stancy et al. developed the DCP mode and its reconstruction is validated by X-band SAR data [
14]. Raney et al. proposed the CTLR mode and utilized the m-δ method to decompose the CTLR SAR data. Nord et al. compared the quad-pol SAR data reconstruction performance of the pi/4, DCP, and CTLR modes. Additionally, the polarimetric interpolation model is amended, making it applicable to double-bounce-scattering-dominated areas [
15]. Benefiting from the strong feature-extraction and nonlinear-mapping abilities, convolutional neural networks (CNNs) [
17,
18] have been utilized to reconstruct quad-pol SAR data from the partial-pol SAR mode. Song et al. proposed using a pretrained CNN to extract multiscale spatial features from grayscale single-polarization SAR images, and the spatial features are converted into quad-pol SAR data by the deep neural network (DNN) [
19]. On the other hand, Gu et al. proposed using a residual convolutional neural network to reconstruct the quad-pol SAR image from the pi/4 compact-polarization mode [
20]. To improve the reconstruction accuracy of the cross-polarized term, the complex-valued double-branch CNN (CV-DBCNN) has been proposed in [
21] to extract and fuse spatial and polarimetric features.
It is acknowledged that quad-pol SAR data has superior performance compared to dual-pol SAR data in applications such as urban damage level mapping [
3,
4,
5] and terrain classification [
6,
7,
8,
9]. Once the quad-pol SAR data can be reconstructed from the dual-pol SAR data, its target-detection and classification performance [
22,
23] will improve based on the well-established full-polarimetric SAR techniques [
24,
25,
26,
27,
28,
29,
30,
31,
32,
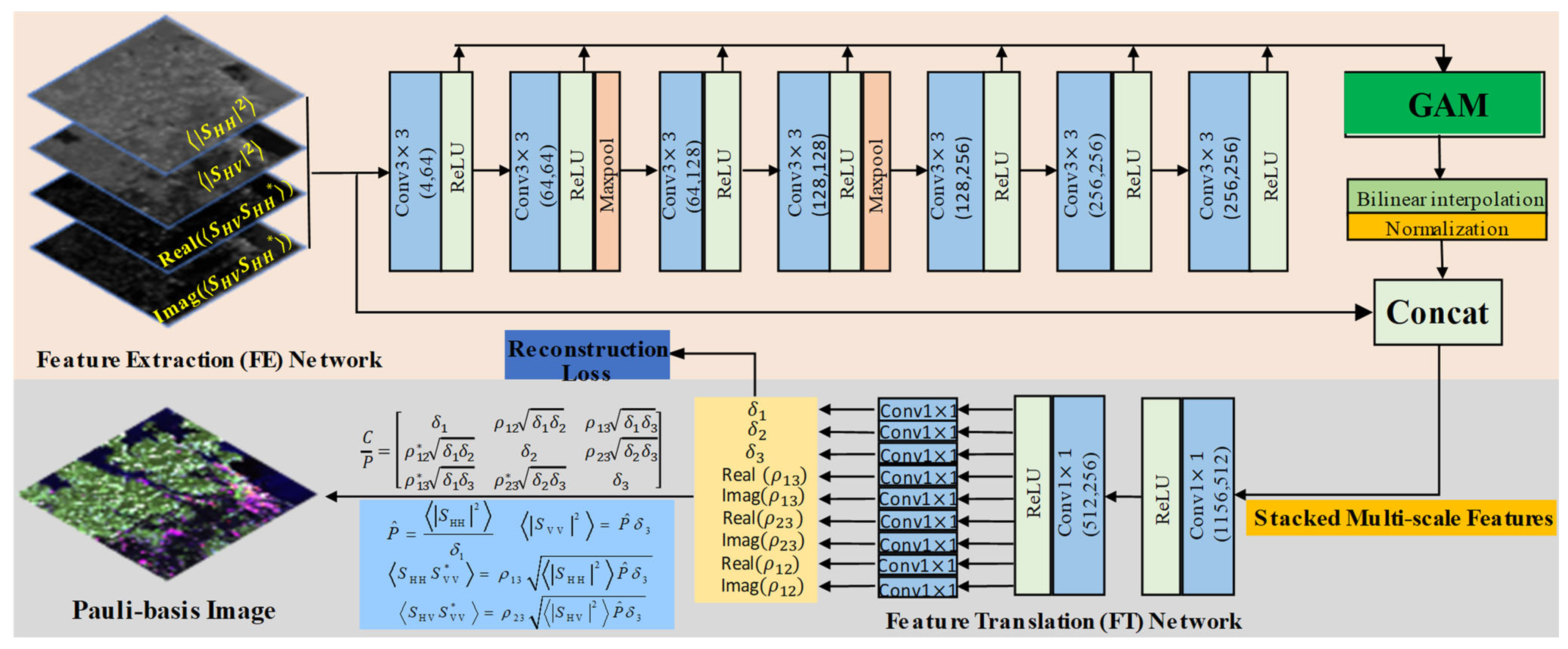
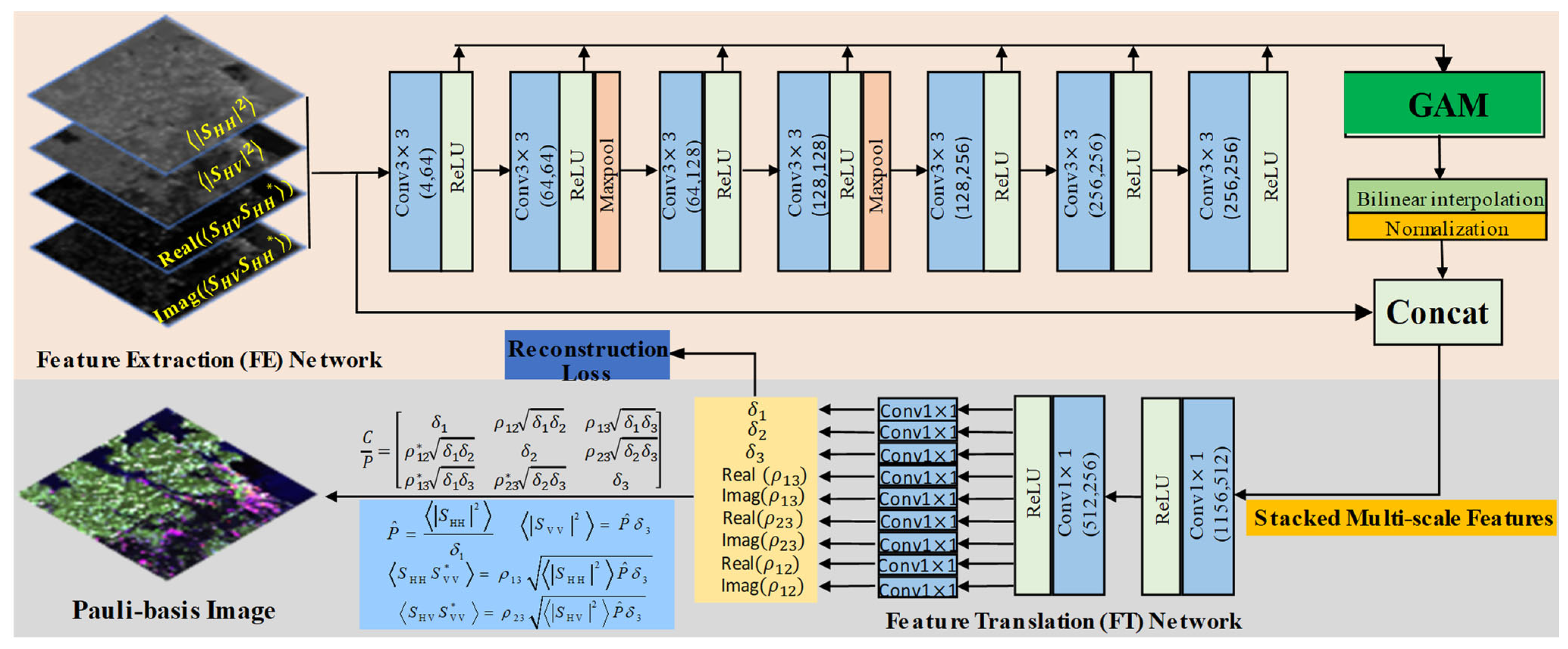
33]. However, to date, there are few published studies on quad-pol SAR data reconstruction from the dual-pol SAR mode (HH-VH or VV-HV SAR modes). In this work, we propose a dual-pol to quad-pol network (D2QNet) using a multiscale feature aggregation network aimed at achieving this goal. Compared to the reconstruction of quad-pol SAR data from single polarization, the proposed method in this work utilizes a fully convolutional neural network that deeply integrates multiscale features, leading to improved accuracy in reconstructing the quad-pol SAR data. Additionally, using the quad-pol SAR data reconstructed by our method can improve terrain classification accuracy. Unlike the reconstruction of quad-pol SAR data from compact polarization, which relies on the assumption of reflection symmetry, the proposed approach presented in this work is more universal and does not require such assumptions. It also serves as a valuable guideline for reconstructing quad-pol SAR data from general dual-polarization SAR modes. The main contributions of our work are listed as follows:
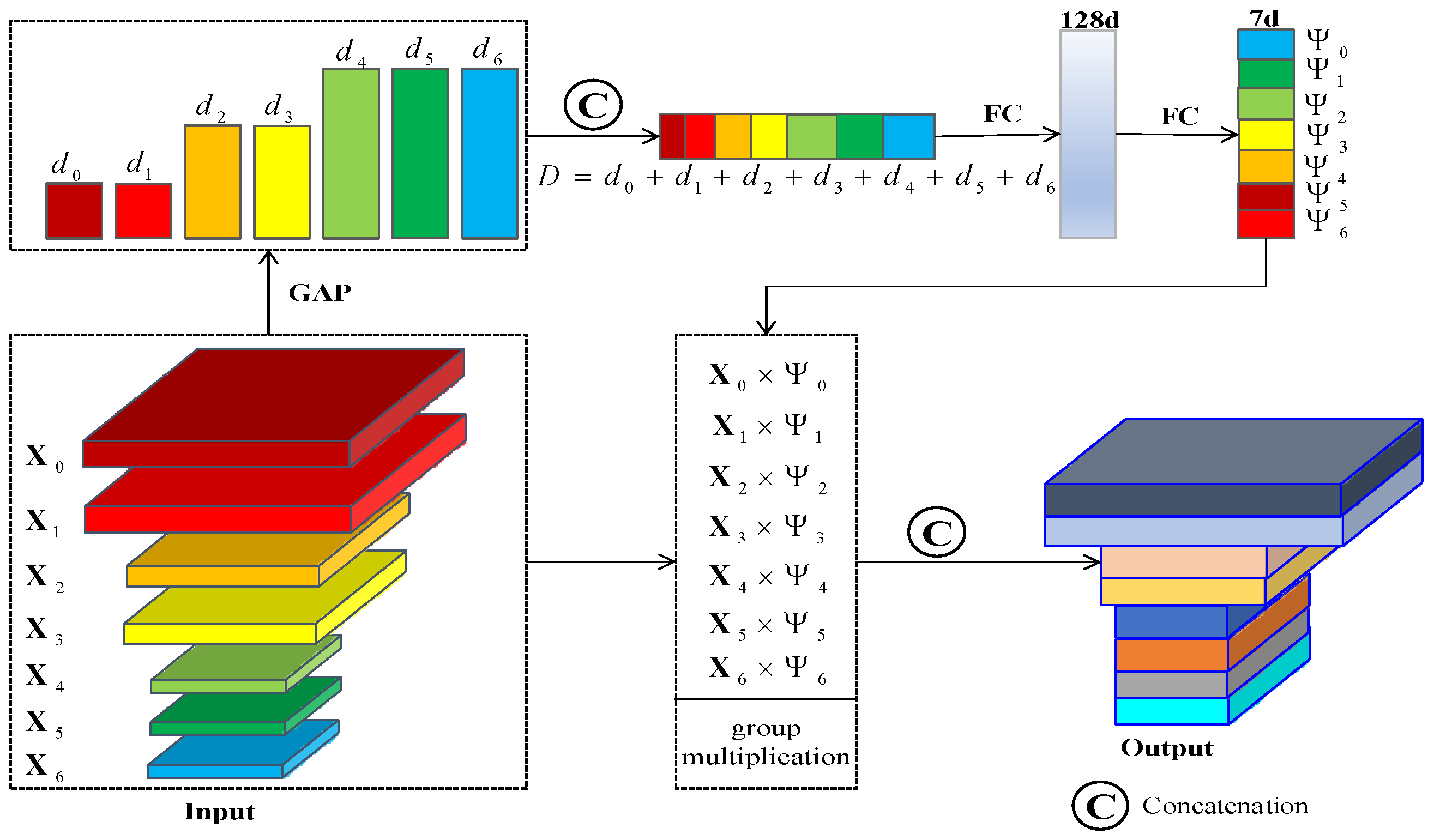
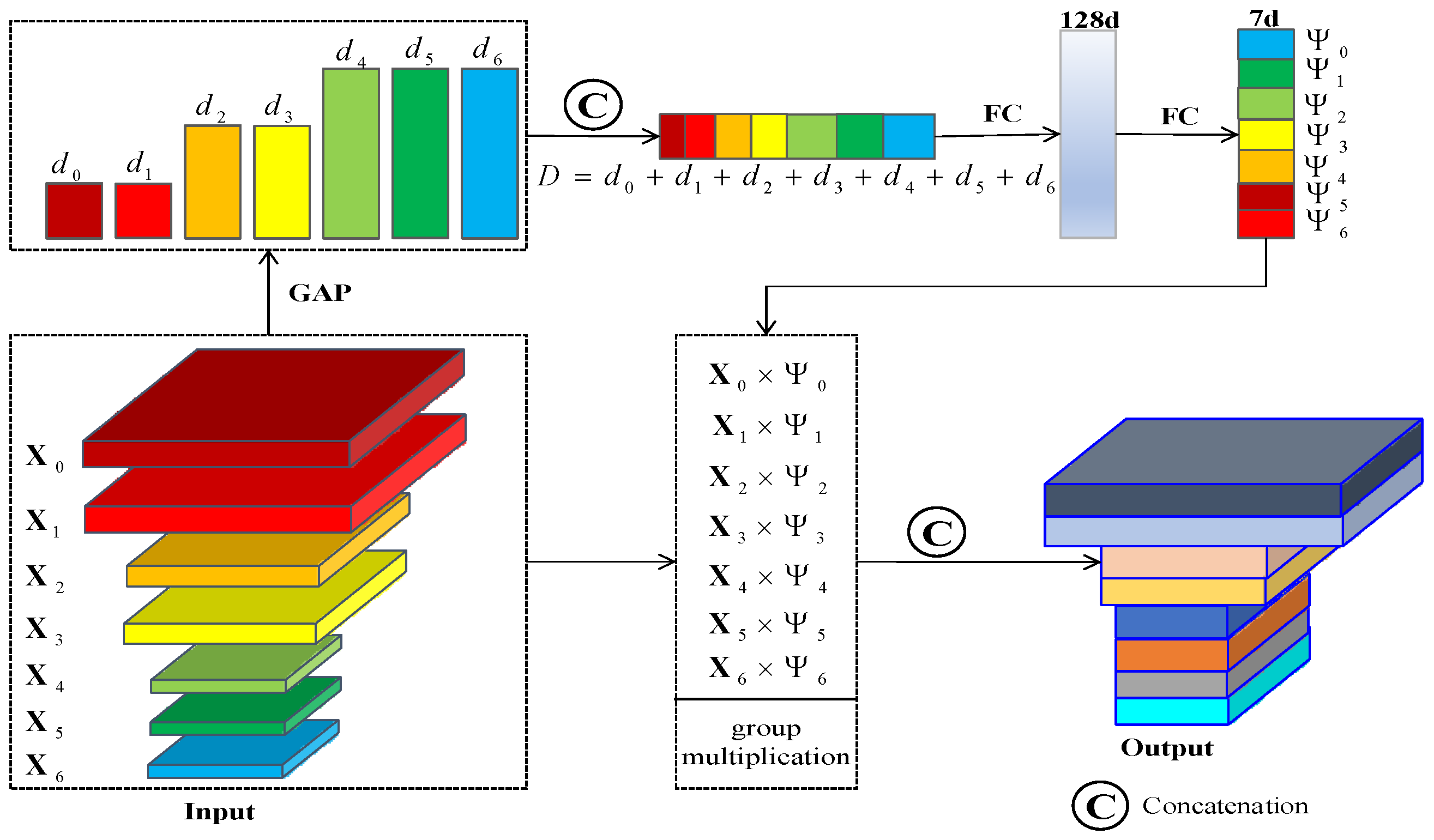
(1) We propose a multiscale feature aggregation network combining with a group-attention module (GAM) to reconstruct the quad-pol SAR data from the dual-pol SAR mode;
(2) The quad-pol SAR data reconstructed by our proposed method can sense changes in targets’ scattering mechanisms before and after a disaster;
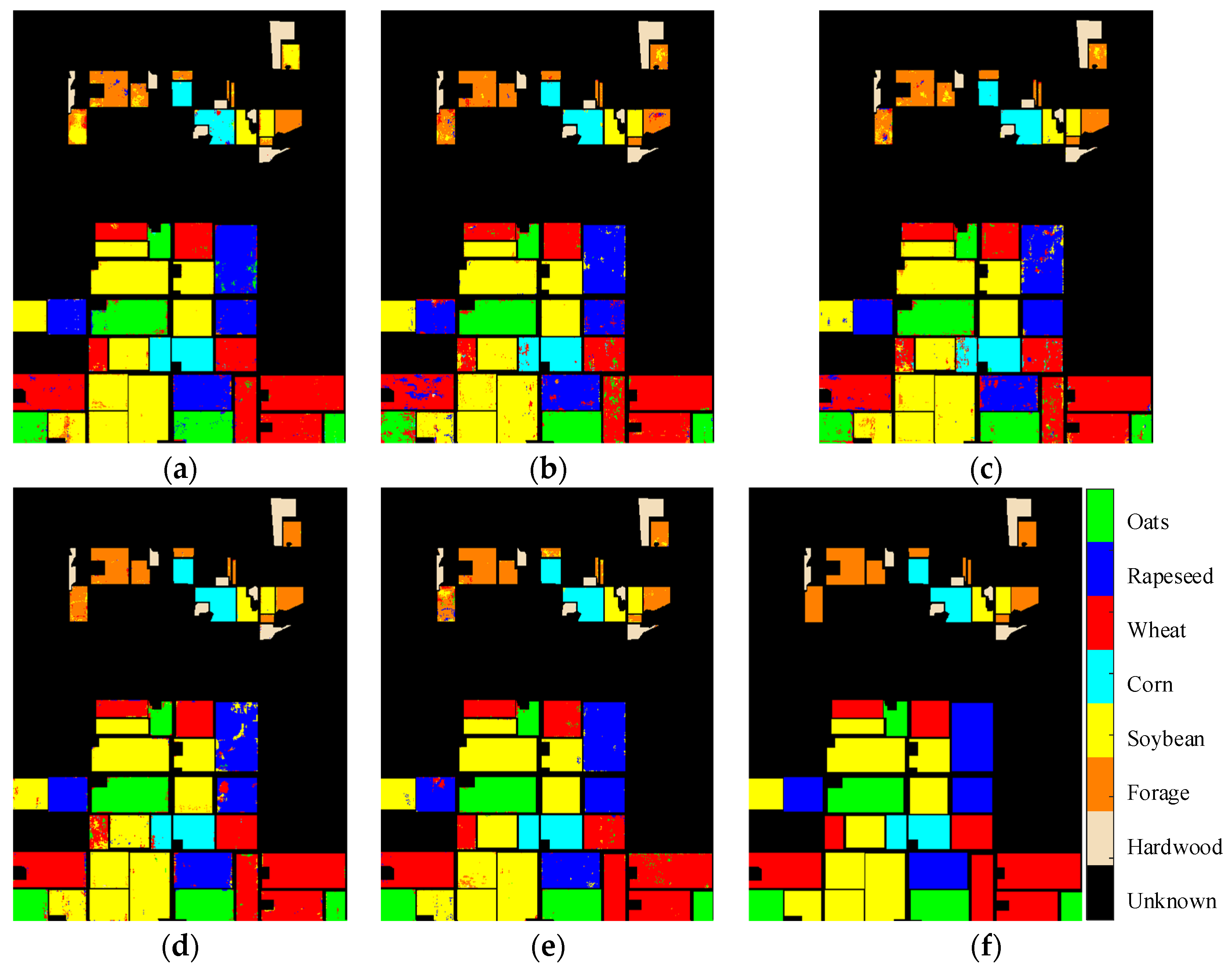
(3) The quad-pol SAR data reconstructed by our proposed method achieve a 97.08% terrain classification accuracy, which is 1.25% higher than the dual-pol SAR data.
This paper is organized as follows:
Section 2 introduces the proposed quad-pol SAR data reconstruction method.
Section 3 analyzes the reconstructed quad-pol SAR data and its polarimetric target decomposition results.
Section 4 compares the terrain classification results with real and reconstructed quad-pol SAR data.
Section 5 discusses some issues in quad-pol SAR data reconstruction. Finally, conclusions are given in
Section 6.
3. Experimental Evaluation with Model-Based Decomposition
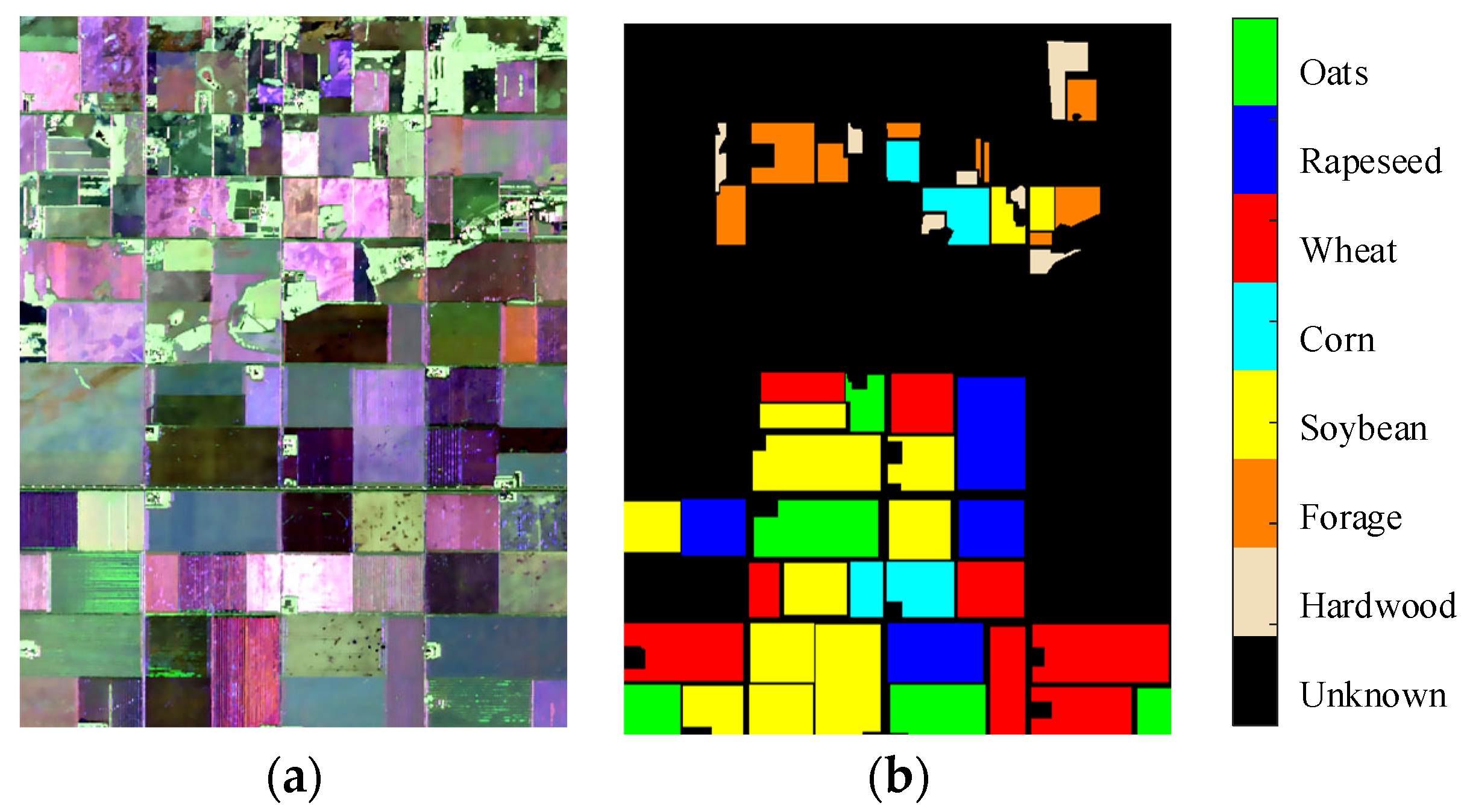
Multitemporal ALOS/PALSAR PolSAR datasets from the March 11 East Japan earthquake and tsunami, which caused extensive damage to coastal buildings, are adopted for subsequent quad-pol SAR data reconstruction performance analysis. The pre-event dataset was acquired on 21 November 2010, and the post-event dataset was obtained on 8 April 2011.
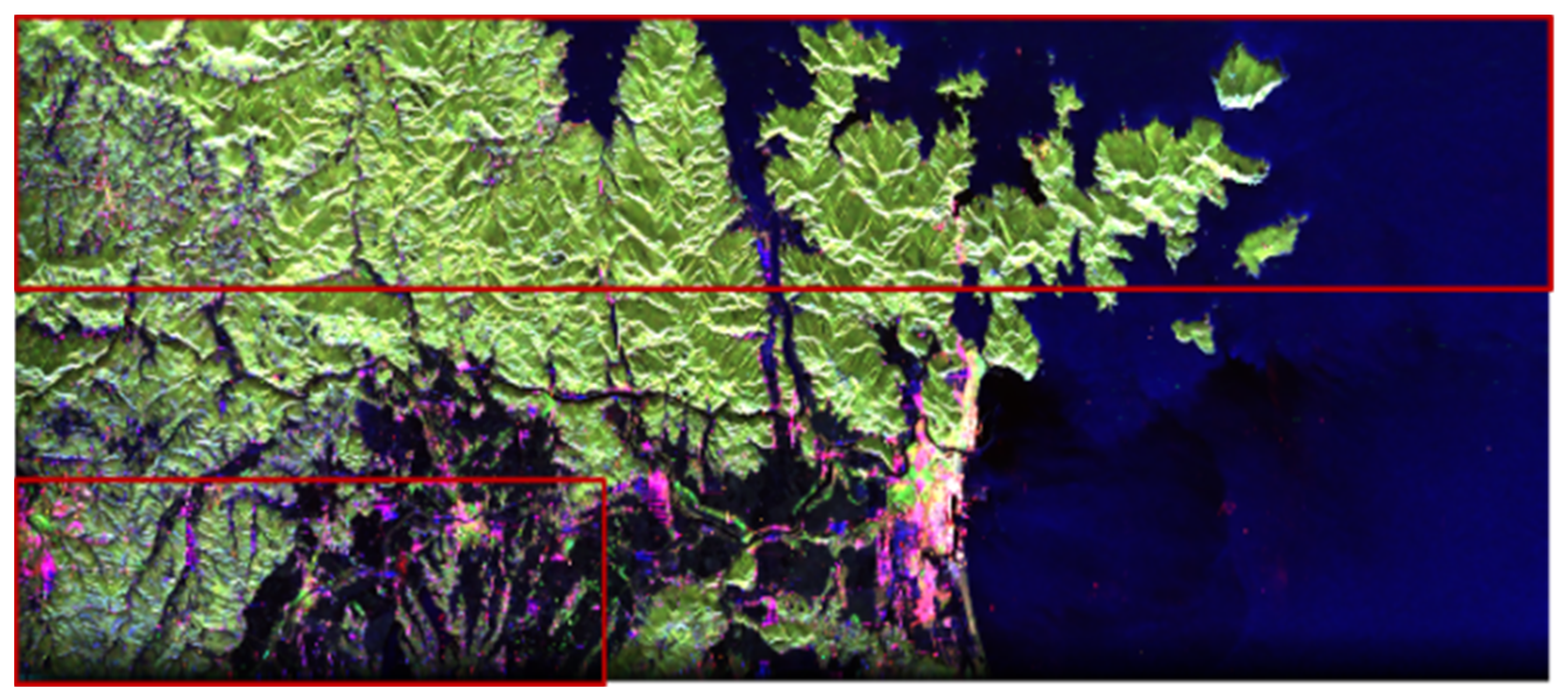
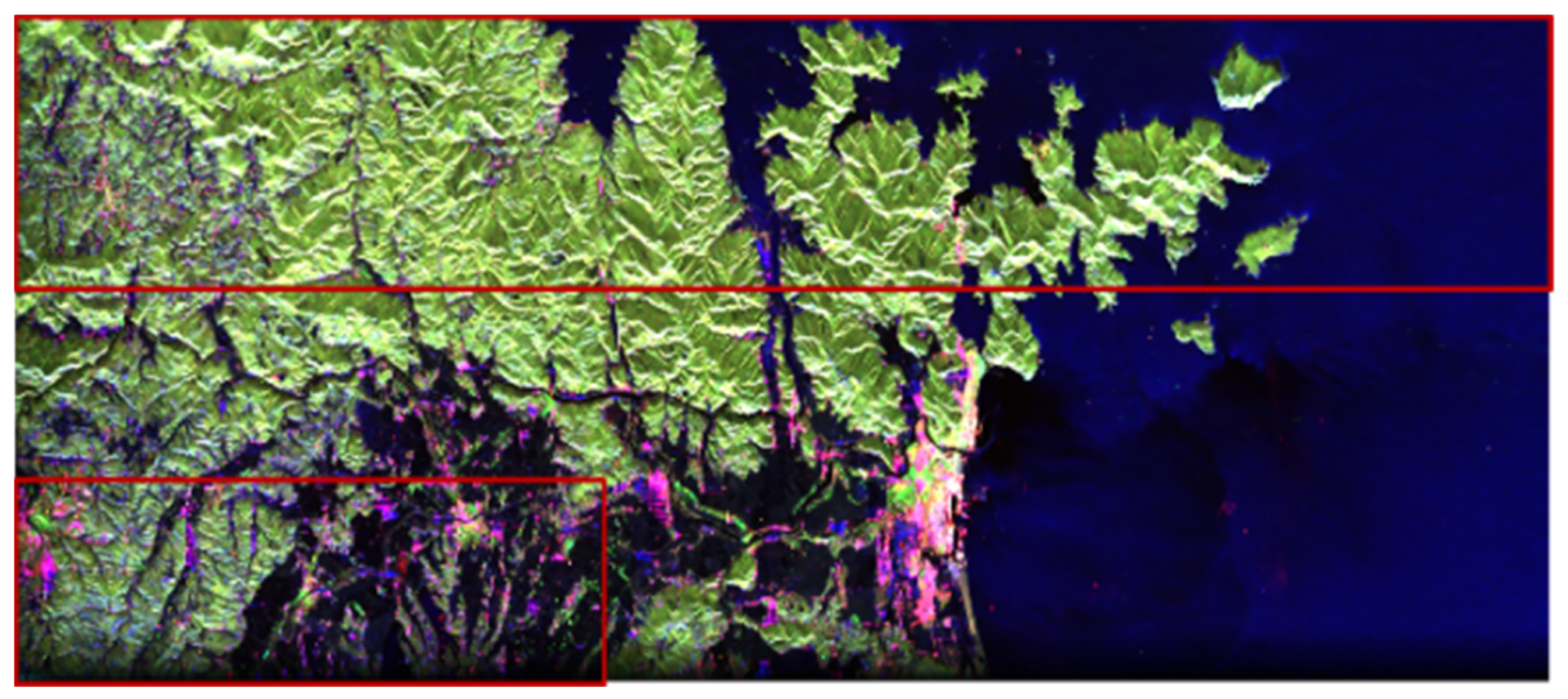
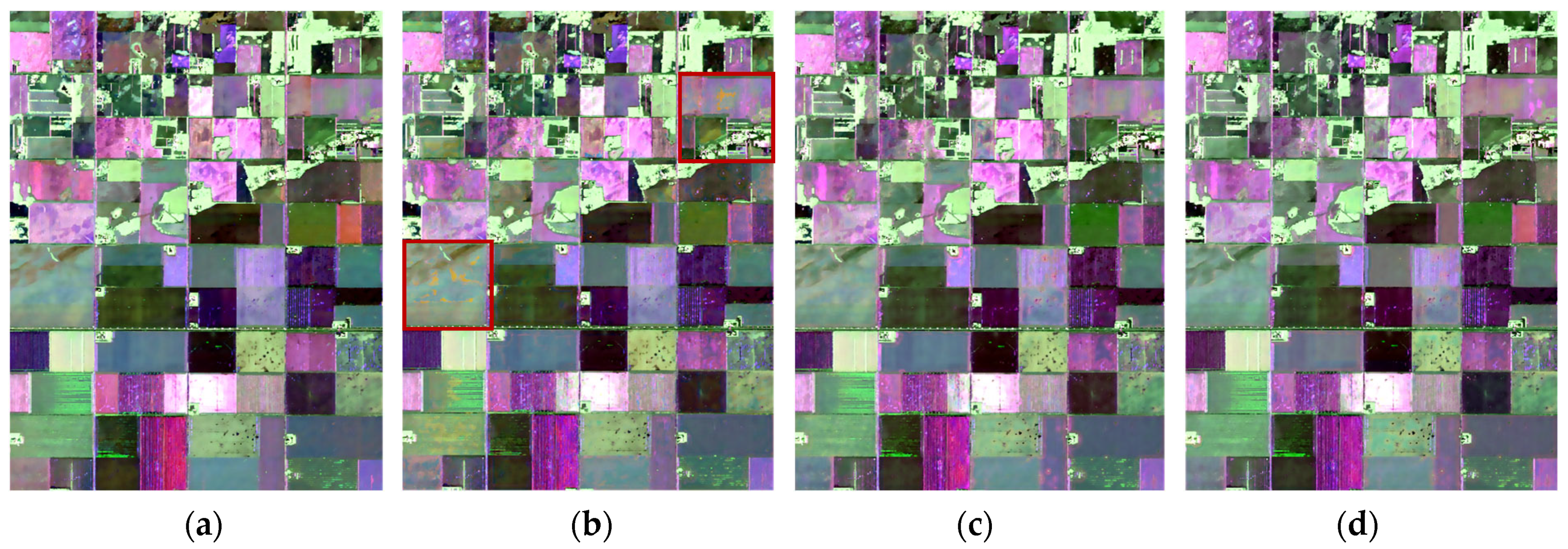
The HH and VH dual-pol SAR data are simulated from original PolSAR datasets for subsequent investigation. The training datasets are selected from the post-event data, which are circled in a red rectangle, as shown in
Figure 3. Total pixels in the training datasets account for 52.16% of the whole SAR image. The remaining post-event data and all pre-event data are used to construct the testing datasets. In order to train the network without taking up too much memory, the whole SAR image is cut into 400 × 400 slice images with a 25% overlapping rate. To the best of our knowledge, quad-pol SAR data reconstruction from dual-pol SAR data has not been reported. The DNN method in [
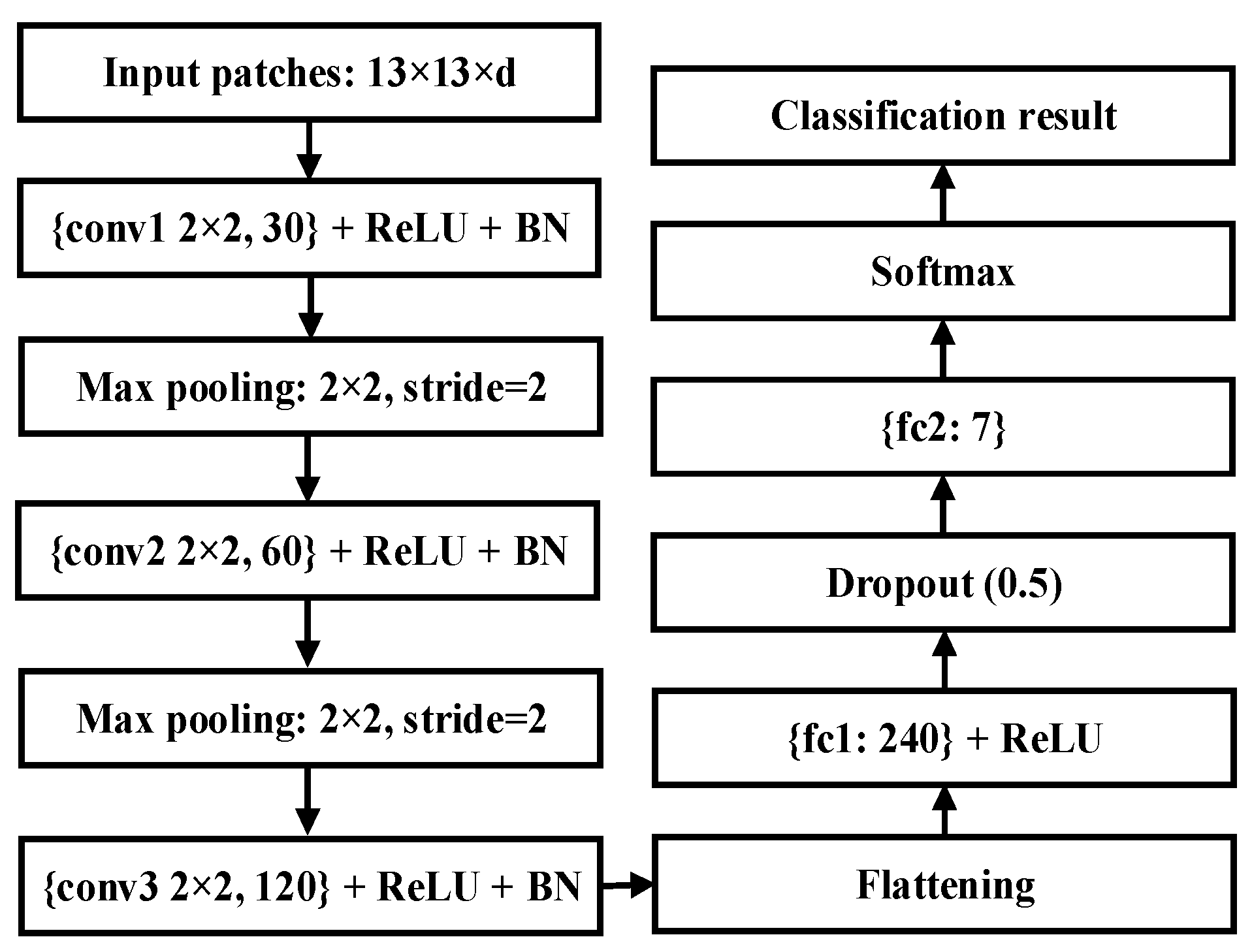
19] can reconstruct quad-pol SAR data from single-polarization SAR data, which is chosen as the comparison algorithm. The first layer of the DNN method is similarly adjusted to four channels to adapt the dimension of the dual-pol SAR data.
The random gradient descent method (Adam optimizer) is utilized to train the network, and its parameters are set as follows: , , , and the learning rate is 0.0001. The network is trained to converge until the number of epochs reaches 100.
3.1. Quantitative Reconstruction Performance Evaluation
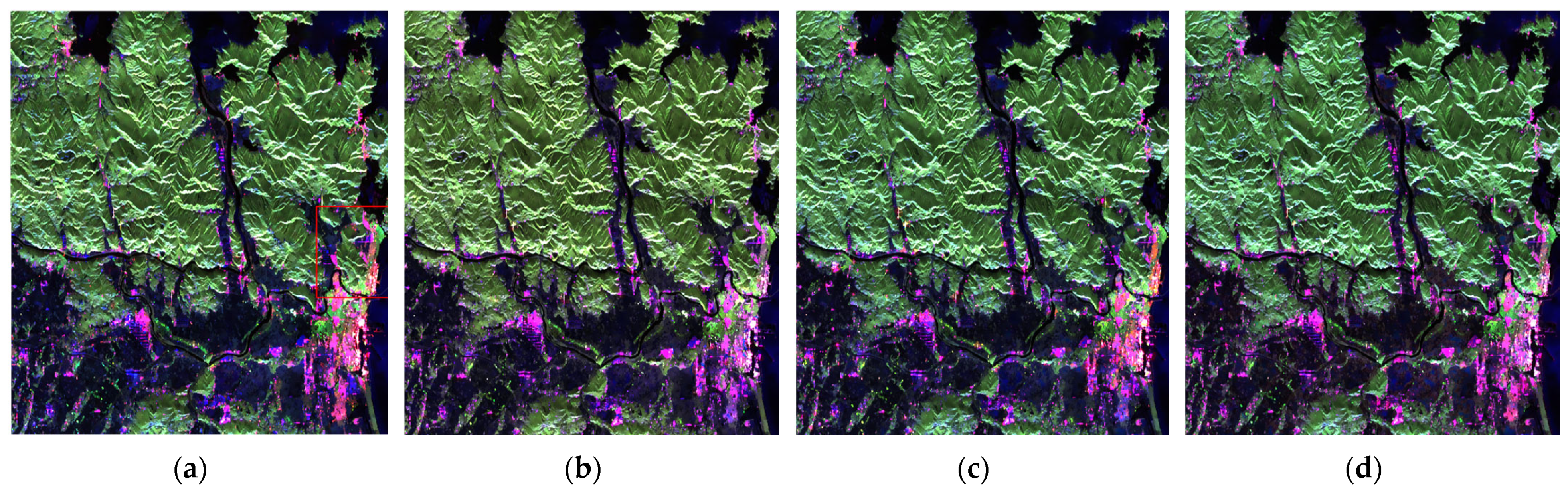
As shown in
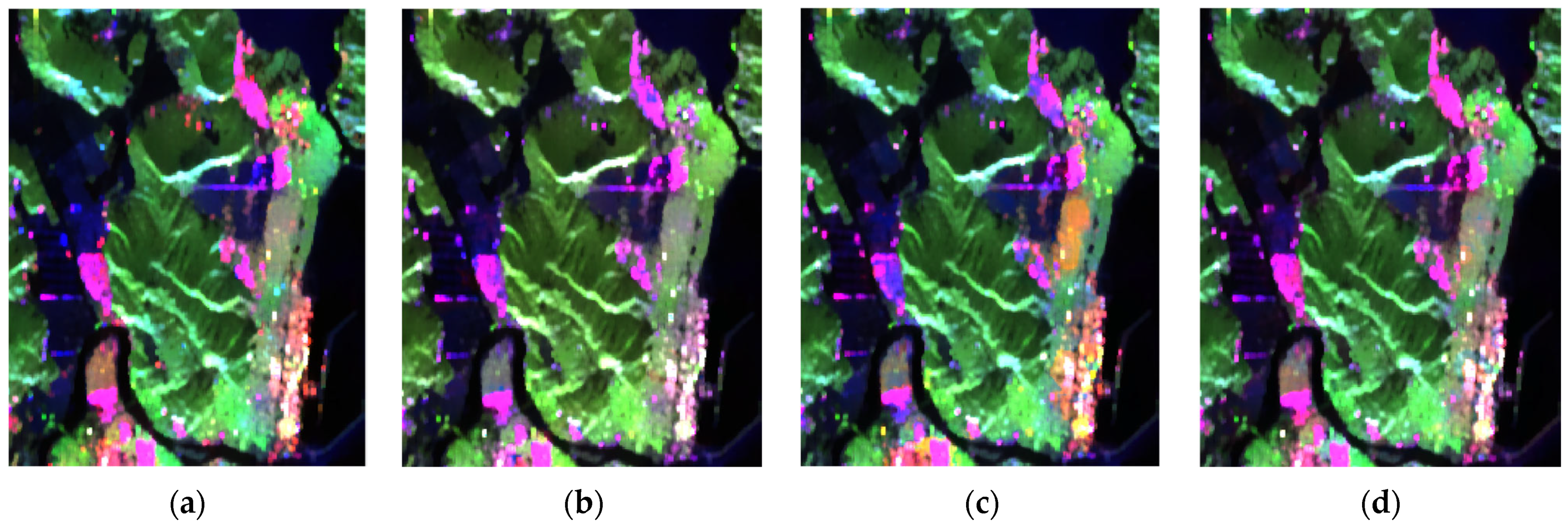
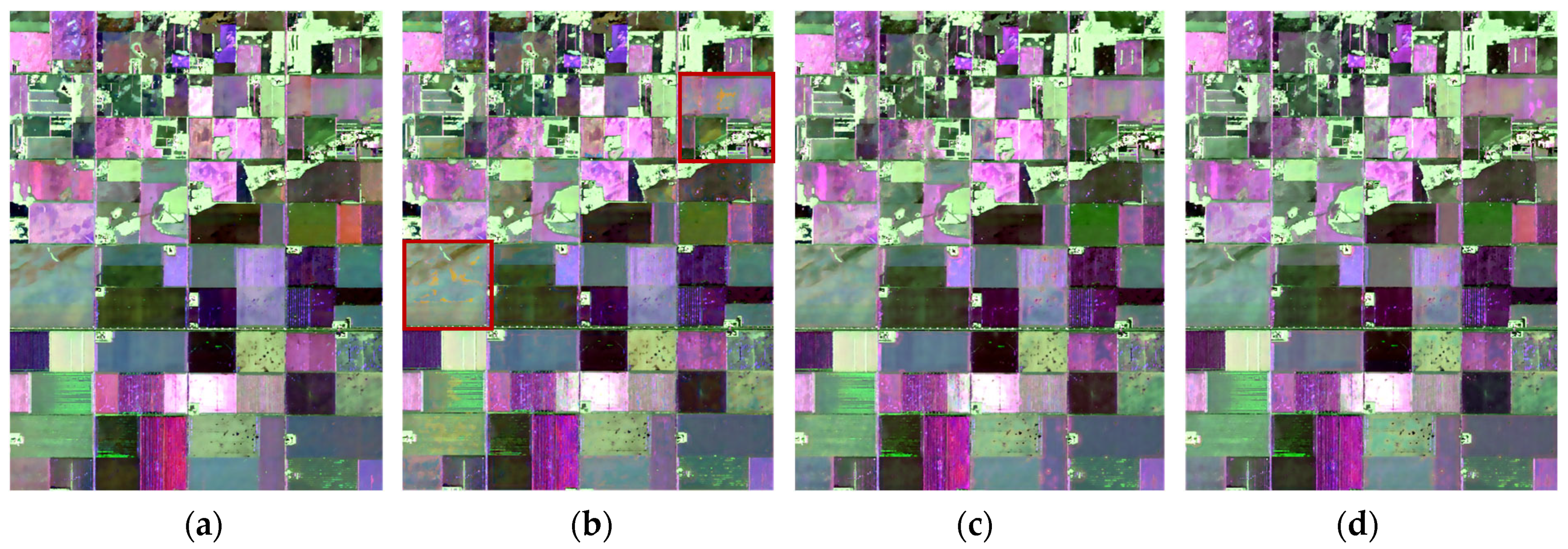
Figure 4, the pre-event Pauli images obtained by different reconstruction methods and the real quad-pol SAR data are compared. Visually, the pre-event Pauli images reconstructed by the proposed D2QNet-v1 and D2QNet-v2 methods are mostly identical to the real quad-pol SAR case. However, the Pauli image obtained by the DNN method shows larger differences in forest areas and seashore buildings when compared to the real quad-pol SAR data.
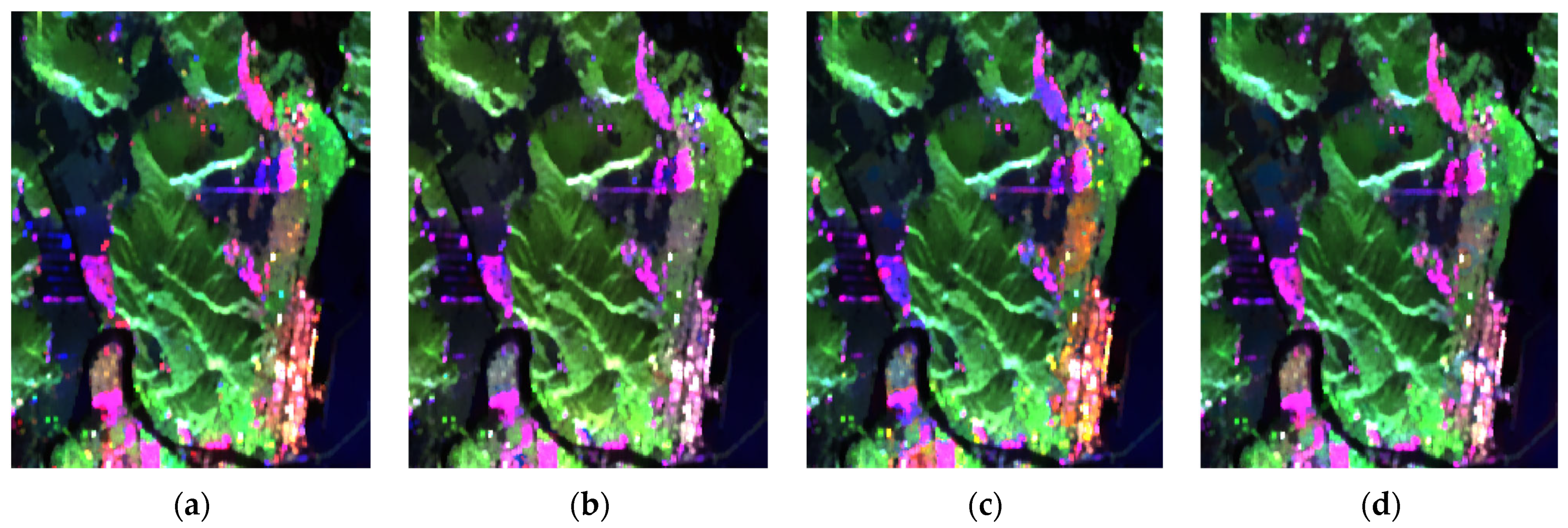
To validate the excellent performance of the proposed methods, we further analyze severely damaged Ishinomaki city, circled in a red rectangle window in
Figure 4a. The pre-event Pauli images of Ishinomaki city are shown in
Figure 5. It can be seen that the proposed D2QNet-v1 method achieves better visual performance in the coastal-building area than the DNN method. Although the D2QNet-v2 method has some deficiencies in reconstructing the scattering information of coastal buildings, it can remove some artifacts of the D2QNet-v1 method and obtain preferable results in the whole Pauli images. Nevertheless, the quad-pol SAR data reconstructed by the DNN method is not effective over buildings and forest areas. Note that, since the FT network in the DNN method only adopts a fully connected network that is unable to capture spatial correlation information among pixels, its reconstruction performance is correspondingly decreased.
To further verify the advantages of the proposed D2QNet-v1 and D2QNet-v2 methods, the coherence index (COI) and mean absolute error index (MAE) are utilized to evaluate the accuracy of the reconstructed polarimetric channels.
where
and
represent the number of rows and columns of the matrix
and
, respectively.
As shown in
Table 3 and
Table 4, the COI and MAE results of the reconstructed quad-pol SAR data in the pre-event indicate that the proposed D2QNet-v1 and D2QNet-v2 methods have higher COI values and a lower reconstruction error in nearly all reconstructed polarimetric channels than the DNN method. The COI value of Im(
) of the DNN method is negative, which means that its reconstruction appears with serious problems. It is worth noting that the COI and MAE indexes in one polarimetric channel cannot always reflect the advantages of the reconstruction methods, and the COI is not strictly consistent with the MAE index. In other words, higher COI values do not necessarily mean that the overall reconstruction error is lower. Detailed reasons for this are explained in the Discussion section.
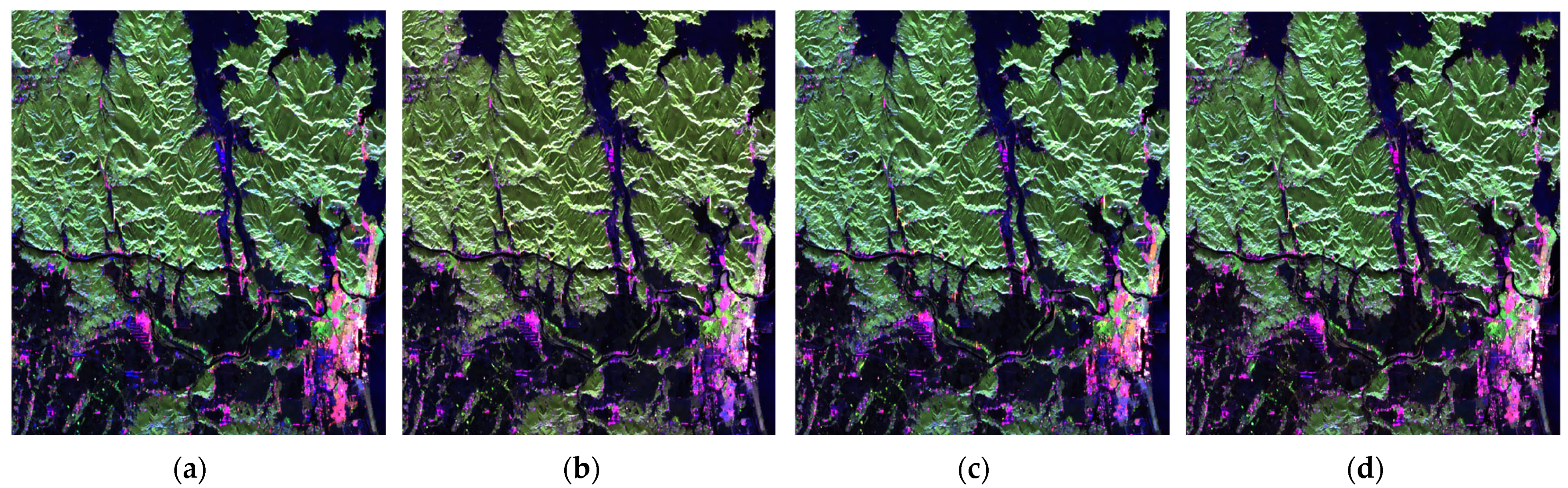
The post-event Pauli images of the real quad-pol SAR data and the different reconstruction methods are shown in
Figure 6, and their Pauli images of Ishinomaki city are shown in
Figure 7. Overall, it can be seen that the proposed D2QNet-v2 method achieves the best visual performance among all reconstruction methods. The D2QNet-v1 method provides a preferable visual experience in coastal-building areas. However, in forest and other complex regions, the DNN method produces biased reconstruction results.
Quantitative comparison results in terms of the COI and MAE indexes are given in
Table 5 and
Table 6. Similar to the pre-event case, the proposed D2QNet-v1 and D2QNet-v2 methods achieve a superior performance to the DNN method. The polarimetric channel Im(
) reconstructed by the DNN method is also negatively correlated with the real quad-pol SAR data. From a reconstruction error perspective, the proposed D2QNet-v2 method obtained optimal quantitative comparison results.
3.2. Quantitative Comparison with Model-Based Target Decomposition
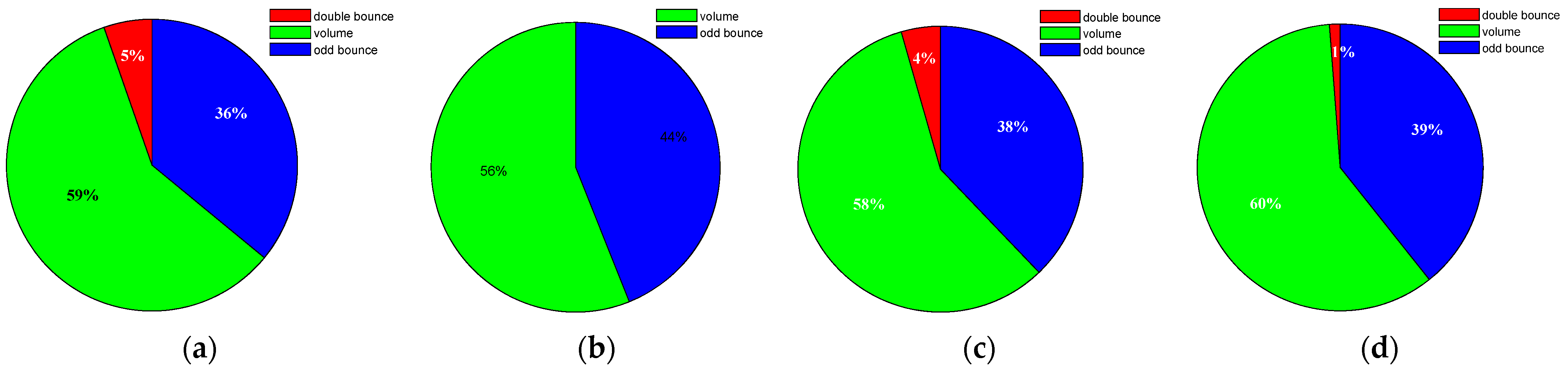
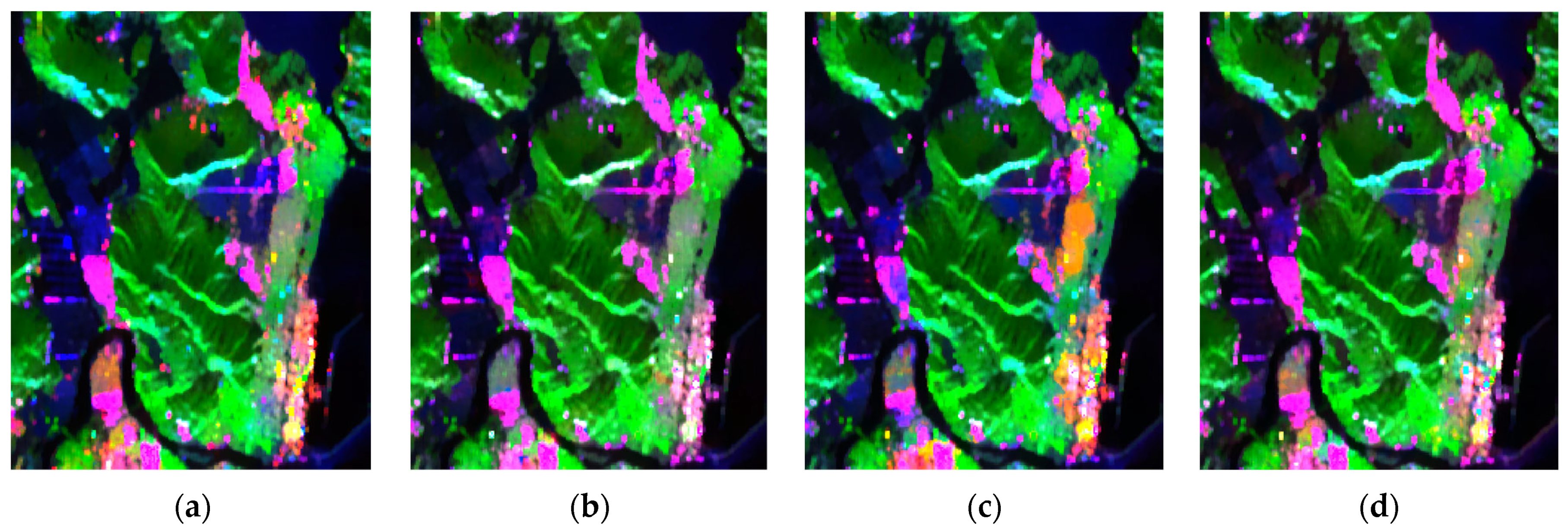
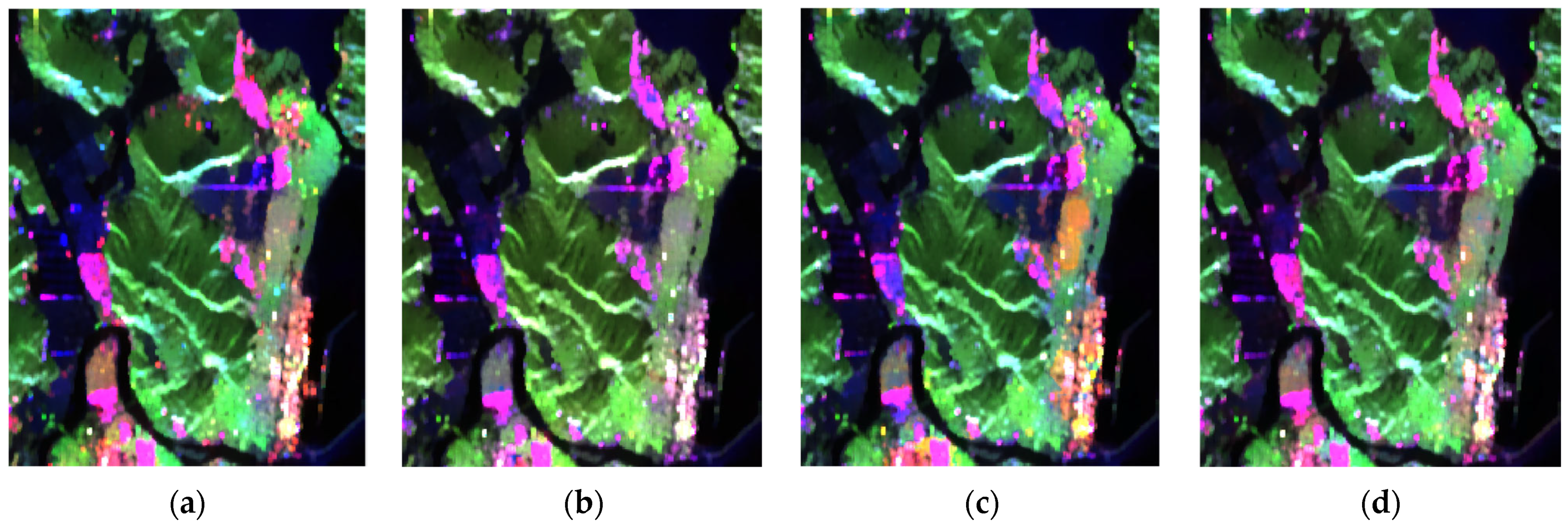
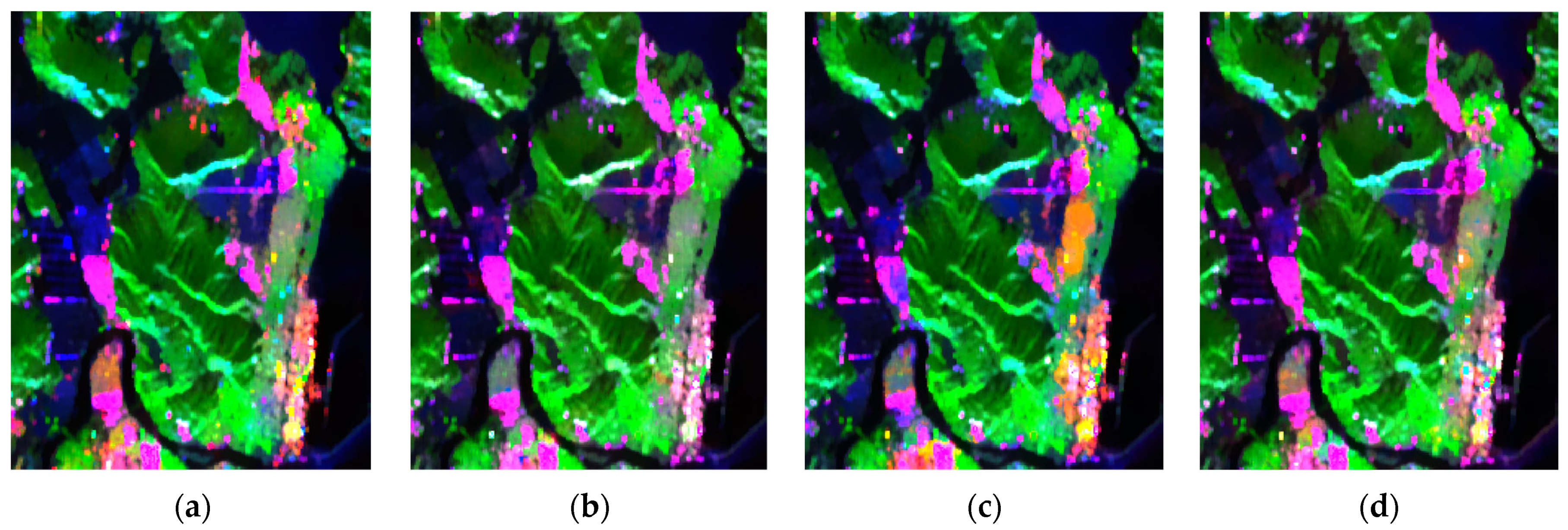
In order to evaluate the reconstruction performance more effectively, we utilize polarimetric target decomposition to assess the scattering mechanism preservation between the real and reconstructed quad-pol data. Specifically, we use the Yamaguchi target decomposition method on real and reconstructed quad-pol data, and the decomposed results are illustrated in
Figure 8. The red, green, and blue color of the Pauli images represent the double-bounce scattering, volume scattering, and odd-bounce scattering, respectively.
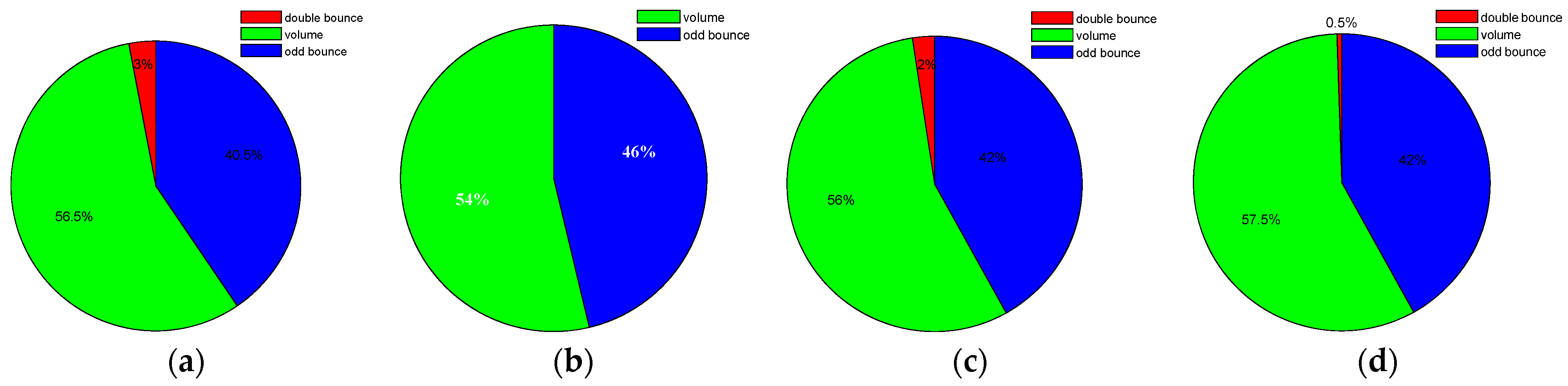
Figure 9 shows the proportions of double-bounce, odd-bounce, and volume-scattering components in
Figure 8. It can be seen that the quad-pol SAR data reconstructed by the proposed D2QNet-v1 method has the best scattering mechanism reconstruction performance, with a scattering mechanism that is consistently similar to that of the real quad-pol SAR data. However, the DNN method seriously underestimates the double-bounce-scattering component, causing its value to become zero. Additionally, the DNN method overestimates the odd-bounce scattering and underestimates the volume scattering, leading to poor reconstruction performance in forest areas. It should be noted that the targets’ scattering information reconstructed by the DNN method is completely out of line with the real quad-pol SAR data, rendering it unusable for practical applications.
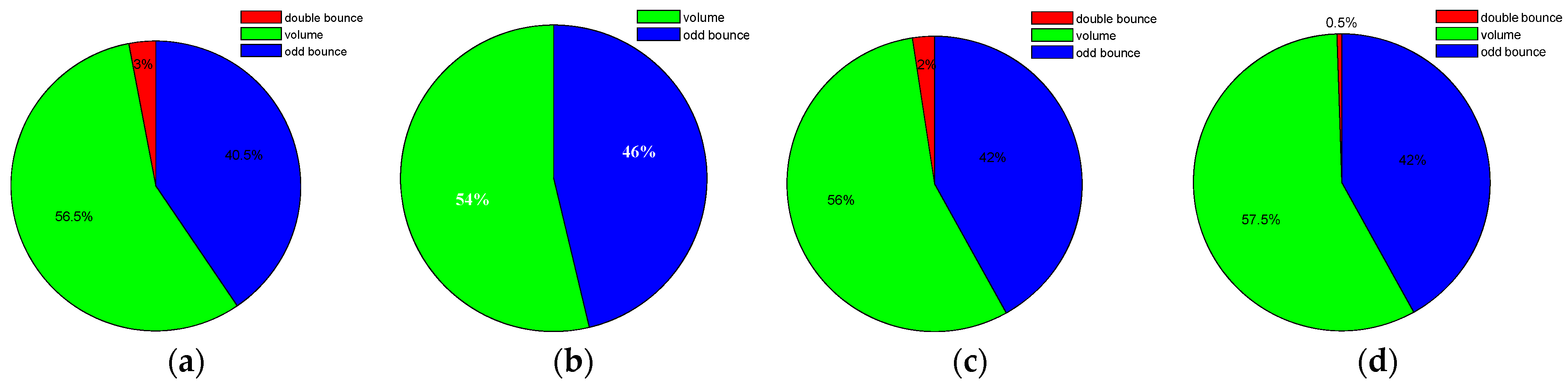
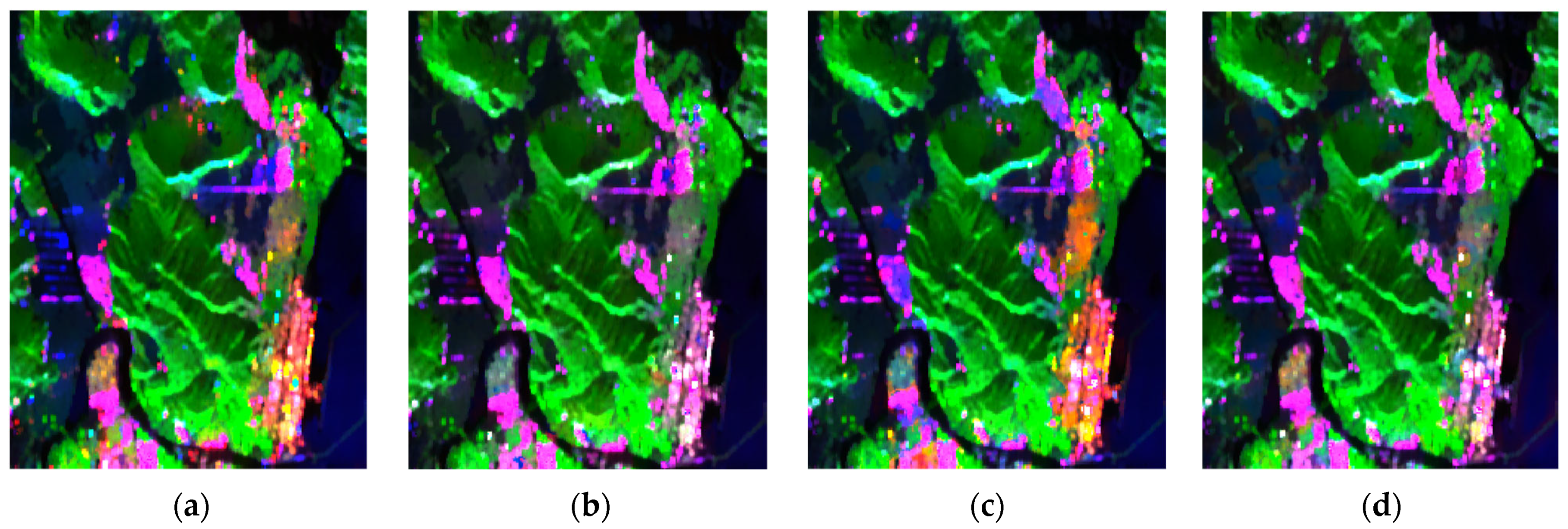
Similar to the pre-event case, the Yamaguchi target decomposition results of the real and reconstructed quad-pol data in the post-event are displayed in
Figure 10.
Figure 11 shows the proportions of the double-bounce, odd-bounce and volume-scattering components in
Figure 10. Compared with the real quad-pol SAR data, the quad-pol SAR data reconstructed by the proposed D2QNet-v1 method outperforms other methods in terms of preserving the scattering mechanism. In Ishinomaki city, which suffered severe damage in the post-event, a large number of buildings collapsed and the corresponding double-bounce-scattering component was reduced. As a result, the percentage of double-bounce-scattering components obtained by the proposed D2QNet-v1 method has decreased by 2%, which is consistent with the real quad-pol SAR case. It should be noted that obtaining accurate information on double-bounce scattering changes is critical for disaster evaluation. However, the DNN method still overestimates the odd-bounce scattering and underestimates the volume and double-bounce scattering, which renders the quad-pol SAR data reconstructed by the DNN method ineffective for practical applications.
In summary, compared with the DNN method, the proposed methods achieve superior qualitative and quantitative quad-pol SAR data reconstruction performance. Moreover, the proposed method can preserve the targets’ scattering mechanism well, further confirming its excellent reconstruction performance.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}