1. Introduction
With the increasing requirements for an Internet of Things in the oceans, efficient data processing and transmission become critical for ensuring the instantaneity for the underwater environment monitoring [
1,
2] and emergency rescue [
3]. Orthogonal frequency division multiplexing (OFDM) has been a viable method in bandwidth-constrained underwater acoustic communications [
4,
5], as a result of its high spectral efficiency and ability to resist frequency selective fading. Nonetheless, the selective channels decided by variant parameters, such as distribution of sound speed [
6], bottom reflection coefficient and surface waves [
7], limit the performance improvement of the underwater acoustic (UWA) OFDM system [
8,
9].
To better detect the OFDM signals from UWA channels, variable equalizers have been applied, e.g., linear equalizers including zero-forcing (ZF) and minimum mean square error (MMSE) equalizers [
10], and decision feedback equalizer (DFE) such as the Turbo equalizer [
11,
12]. The linear equalizers with simple structures are widely used in terrestrial communication links [
13,
14], whose performances rely on accurate channel estimations. Altough the DFEs show satisfactory performance without a channel estimator, it is at the expense of the requirement for higher computational complexity and extra channel coding [
15,
16]. In practice, real-time underwater acoustic communications (UAC) do not allow for a large number of online iterations [
17,
18,
19], which still require linear equalizers. However, the noise amplification problem occurs when applying the ZF equalizer. Although MMSE equalizer overcomes this problem by considering the signal-to-noise ratio (SNR), it is hard to estimate the statistical values of the noise in real underwater environments including non-Gaussian and colored noise [
20,
21]. To further optimize the equalizer, deep learning (DL) and neural network (NN) have been developed [
22,
23,
24,
25,
26]. With enough samples, a DL-based receiver can statistically learn to detect the symbols from the channel and other interference.
H. Ye et al. proposed a DL-based OFDM receiver [
22], which used three fully connected layers to deal with a 64-subcarrier OFDM symbol with a block-type pilot. The bit error rate (BER) of the NN-based receiver was lower than the least square (LS) and MMSE estimation and detector in the simulation. To further obtain higher detecting accuracy, researchers have tried to substitute the whole communication system for the end-to-end networks [
22,
24,
25,
27]. The traditional digital modulation and subcarrier mapping has been replaced by the autoencoder (AE) [
24]. A blind receiver without the pilot has been built with a convolutional neural network (CNN), which showed better performance compared with the traditional baselines. Similarly, an AE has been designed [
25] to provide a modulation scheme for the multicarrier system. This work fed the decoder with both the channel state information (CSI) and received symbol, constructing a data-driven model for symbol detection. The simulations showed significant BER performance in additive white Gaussian noise (AWGN) channels. In B. Lin’s work [
28], a super-resolution channel reconstruction network was combined with AE for the marine communication system, proving its effectiveness in slow fading channels. H. Zhao et al. [
29], J. Liu et al. [
30], and Y. Zhang et al. [
31] proposed different network structures for the UWA OFDM receiver, and trained them with the WATERMARK dataset. These studies focused on designing specific network structures to improve the performance of the OFDM receiever. Nevertheless, the theoretical explanation of the networks remains limited. There is no quantitative analysis for the hyperparameters.
Although the above NN-based communication systems show good performances in simulations, it is difficult to practically implement them, particularly in underwater acoustic channels because of the heavy computations and complex structures. For instance, Refs. [
29,
30,
31] did not conduct sea trials. Another option is to build simple networks for the module optimization. M. Turhan et al. proposed an NN-based generalized frequency division multiplex with index modulation (GFDM-IM) detector to detect the symbols after a coarse detector [
32]. With perfect CSI in the receiver, the simulation results showed lower BERs of this network than the ZF detector. T. Wang et al. have built a CNN for index modulated OFDM (IM-OFDM) detection, whose performance approximates the maximum likelihood (ML) detector [
33]. A further option for NN is the extreme learning machine (ELM)-based receiver. This kind of receiver integrates the channel estimator and equalizer with a single layer NN, which is trained online for each time [
34,
35]. In L. Yang’s work, with enough block pilots for training, a long frame with a large quantity of OFDM symbols was simulated [
35], showing better performance than MMSE equalizer and NN-based detector proposed by H. Ye et al. [
22]. Since the UWA channels were time-variant, the ELM detector was unable to show good performance, because the transmitted frames had to be kept short to reduce the influence of the time-variant channel. H. Zhao et al. [
36] proposed a transfer strategy for the DNN-based OFDM receiver and tested it with the WATERMARK dataset and real experimental data. This study focused on the network retraining, and did not discuss the design of the applied NN structure. Y. Zhang et al. [
37] focused on solving the channel sample augmentation problem for the NN-based channel estimator. Both [
36,
37] proposed an innovative strategy to solve the application problem of DNN-based receievers.
Despite the good simulation results produced by the above structures, problems still exist when the system is implemented in UWA channels.
Firstly, the real dataset is difficult to obtain because the UAC links are usually one-way with no feedback. Hence, the uncertain time-variant channel states do not allow the system to obtain the samples in a short period.
Secondly, it is not realistic for the NNs to be retrained in a high rate link because the computation loading is still heavy for real-time applications. Consequently, the data-driven works mentioned above barely discuss the performance of the system with real experiments.
In this paper, an attempt at the design and derivation of an NN-based receiver is made for the UWA OFDM system. A simple NN is proposed to integrate the equalization and symbol detection, containing only one fully-connected layer. Firstly, taking both channel frequency response and received symbol as input, the network learns a robust structure to output the symbol directly. To minimize the complexity of the network, the channel and received symbol are divided into blocks of the same size, matched with small-size networks. For attribution to the simple structure, the hyperparameters (mainly the hidden layer size and input dimension) are inferred according to the delay and coherence bandwidth of the channel. Thus, the channel-driven networks are constructed. After being trained with mixed channels and noise samples, the networks show robustness in both simulations and sea trials, performing better than the ZF and MMSE equalizers as well as the ELM-based detector in [
35]. The contributions of this paper are listed as follows.
We propose a low-complexity NN-based symbol detector for the UWA OFDM system. The network takes the segmented channel response and symbol block as input and integrates the equalization and detection processes. The small input dimension also reduces the requirement for the hidden neurons. The proposed detector shows lower computational complexity than the MMSE and ELM-based detectors.
The NN-based detector is trained offline with a channel dataset containing simulated and real channels. Then the detector can be applied completely independently online with fixed hyperparameters, improving the efficiency of the online receiver. Under the same LS channel estimator, the trained network outperforms the ZF and MMSE equalizers, and the whole receiver is more reliable than the online ELM-based detector in both frequency selective channels in the pool and time-variant shallow sea channels.
To obtain the optimal network structure, the block size of an OFDM symbol is associated with the coherence bandwidth. By testing each network with the input sizes in the range of less than the coherence bandwidth, the optimal hyperparameters can be found. The simulations verify the above configurations.
The remainder of this paper is organized as follows.
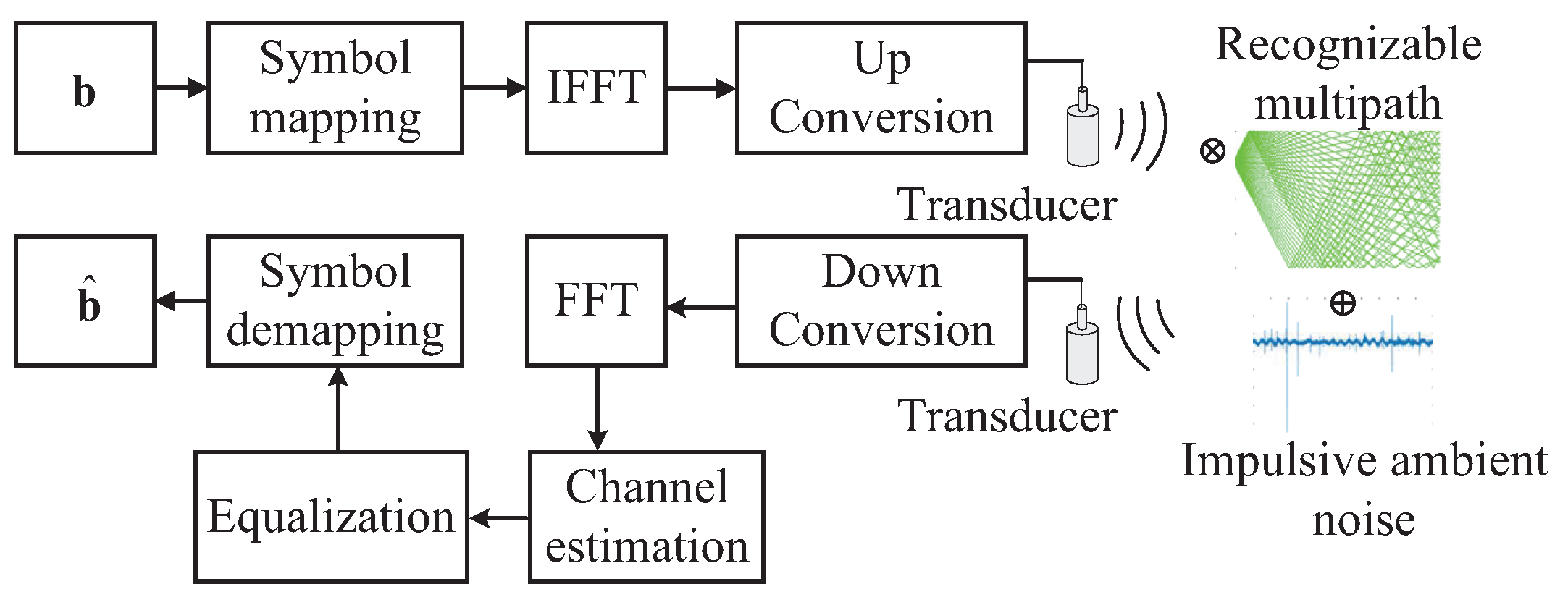
Section 2 describes the UWA OFDM system.
Section 3 discusses the UWA channels and the traditional detectors for symbols suffering from them. The network structure and training strategy are described in
Section 4, while the result discussions of simulations and sea trials are included in
Section 5 and
Section 6.
Section 7 concludes our work.
4. NN-Based Joint Equalization and Detection
Unlike the frequency domain equalizers mentioned above, this paper combines equalization and symbol detection and implements a joint detector with the NN. The detected symbol can be written as
where
is the loss function and
represents the process of the proposed network.
It has been proved that a simple network structure is enough to well solve the receiver problems [
33,
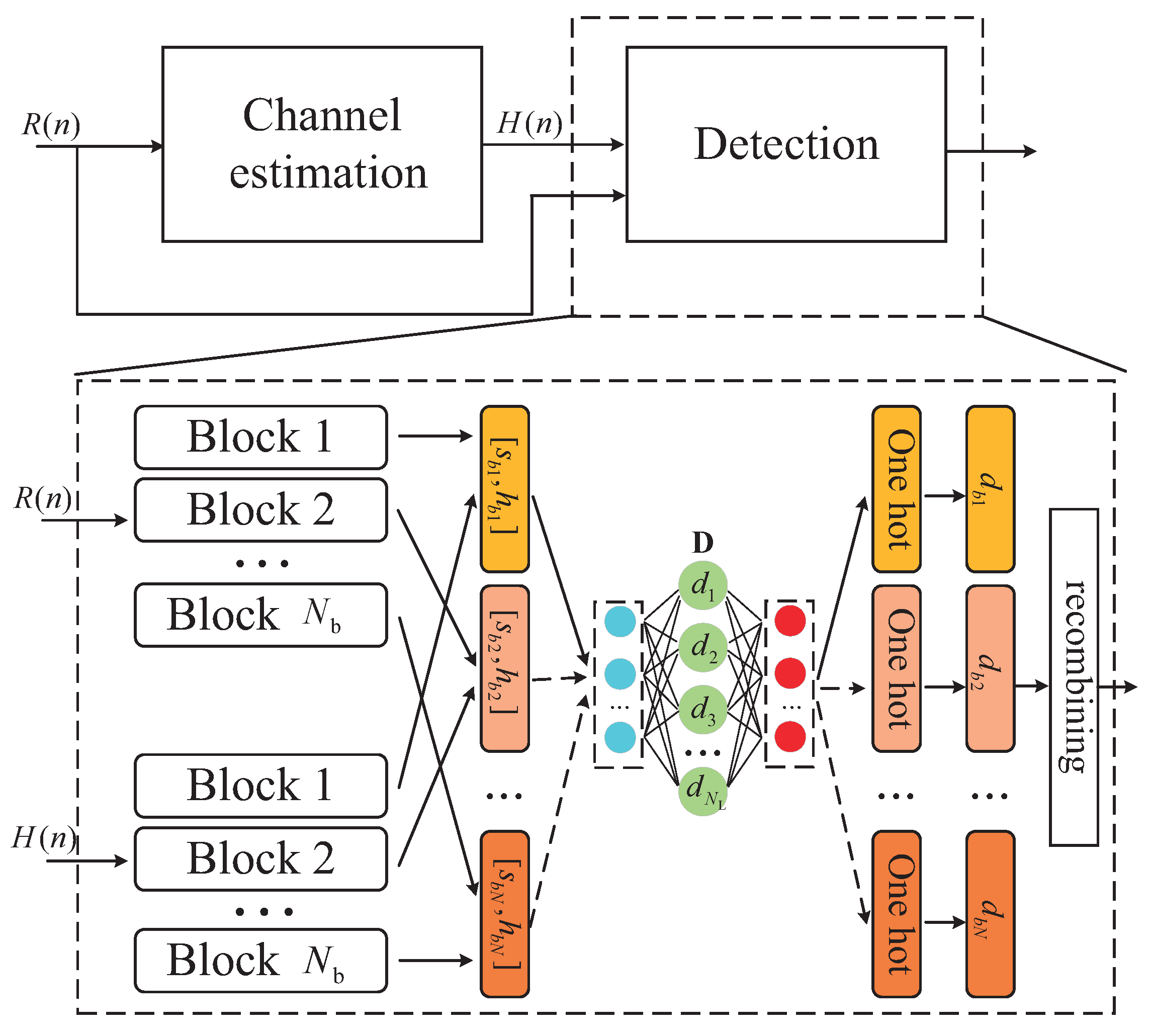
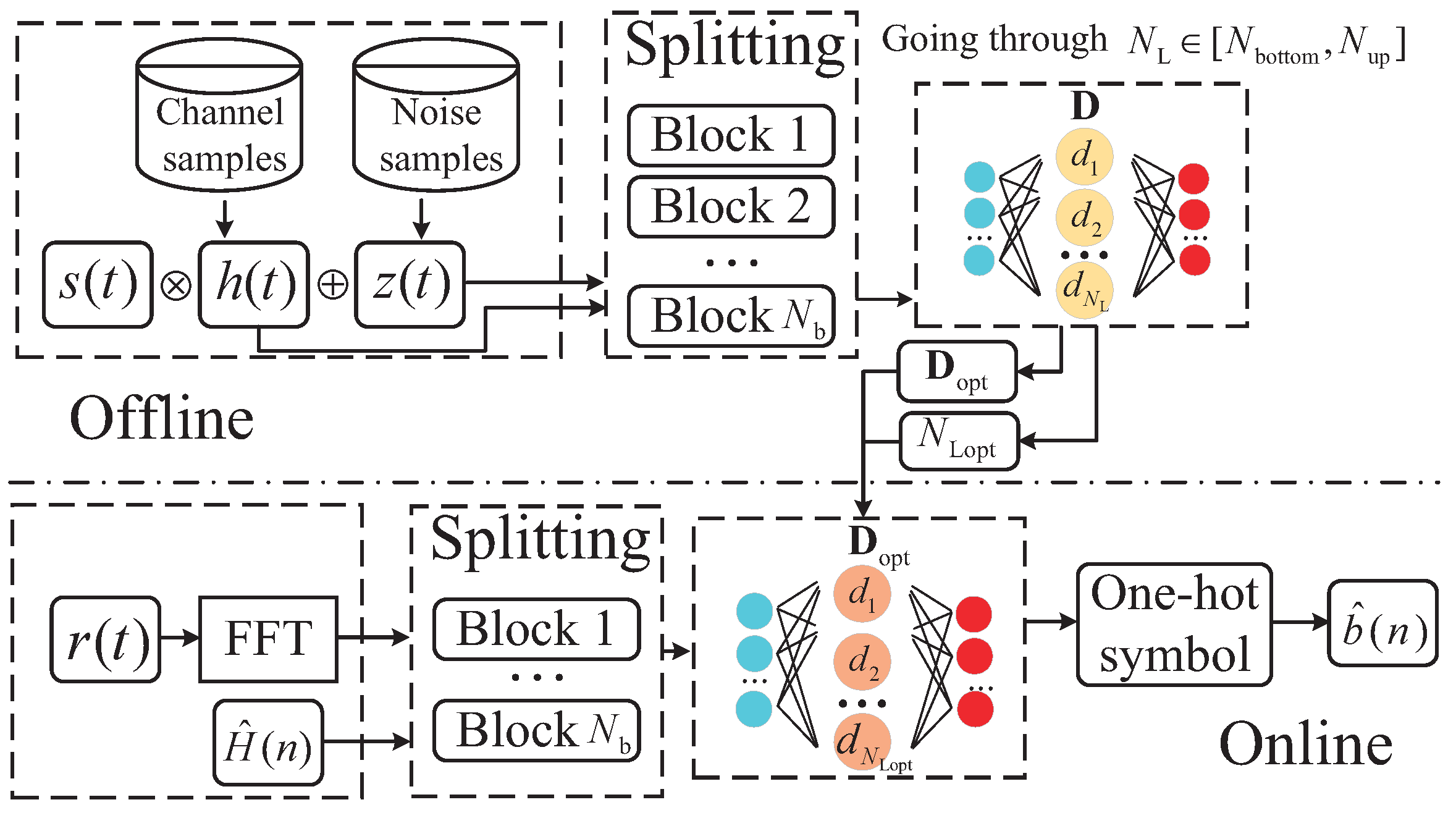
42]. Inspired by this, the proposed joint detector utilizes a single-layered network. As shown in
Figure 4, after channel estimation,
and
are sent to the network for detection. Moreover, a block-input strategy is proposed to further decrease the complexity of the network.
is the number of blocks and
denotes the number of neurons. The structure configurations of the network are described as follows.
Input: Before input to the network, the received OFDM symbol with N subcarriers is firstly divided into blocks. Each block contains subcarriers. The same process is conducted with the corresponding estimated channel function . Thus, a small reusable network can be designed for each combination of the data and channel block. To further determine the optimal hyperparameters, a proper should be defined to balance the computation and accuracy of the network, i.e., two rules are proposed:
- (1)
should optimize the performance of the joint detector with estimated channel.
- (2)
The required number of neurons is positively correlated to the input dimension, and should be as small as possible to minimize the computation of the network.
Based on the analysis above, the narrow coherence bandwidth
of the channel is considered, which always limits the performance of the underwater OFDM system. Because the subcarriers in each coherence frequency band suffer from relatively flat fading, an opportunity is found to find the optimal
[
43]. By setting
in the range of coherence bandwidth, the joint detection network is able to deal with the symbol blocks separately in a flat fading channel.
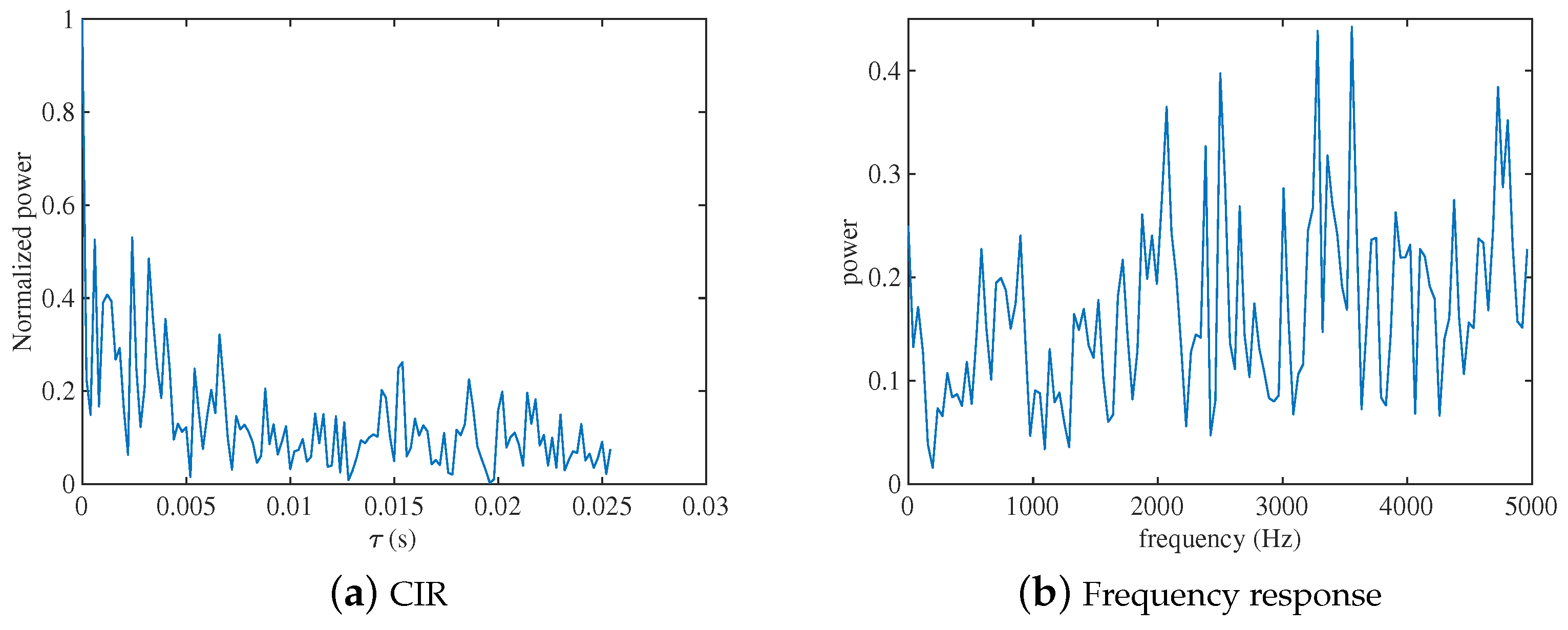
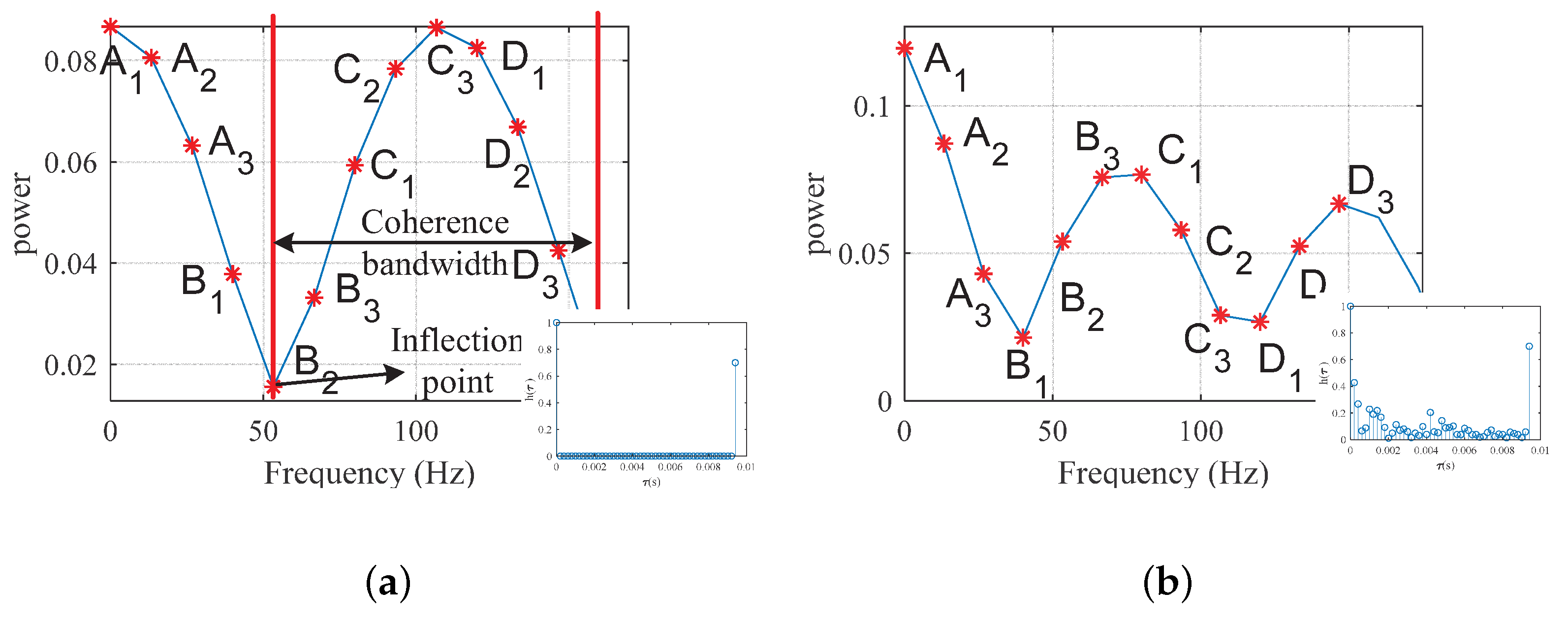
Figure 5a shows the frequency response of a simple channel with one path.
to
are values of the frequency points. According to [
43], for a channel that follows the homogeneous assumption, the coherence bandwidth is inversely proportional to the maximum channel delay
, which can be approximately represented as
For the channel in
Figure 5a,
is easily observed as the frequency range between
and
, written as
In practice, the UWA channel contains more paths as shown in
Figure 5b, whose frequency response is the sum of more than one paths with time-varying coefficients distributions [
39]. With the same estimated
as
Figure 5a, different situations are listed in
Table 1 by taking different sections as blocks. It should be noted that the starting point of the first block should always be
, which is also the first subcarrier of an OFDM symbol. When the width of the block
, block
suffers from selective fading because the section includes inflection points of the frequency response. The same result occurs when
because
includes an inflection point. When
, no sections include an inflection point or experience flat fading. This consistency of flat fading is more conducive to the symbol detection [
44].
According to the discussion above, there is a
in the range
, which decides the optimal
, yielding
where
is the frequency interval of two contiguous subcarriers. The NN with input length
deals with blocks that all suffer from flat fading. Therefore, although the accurate
is difficult to find, its estimate can be an upper bound for finding the optimal input dimension for the network.
Consequently, the input block size
can be quickly found by going through the coherence bandwidth of the estimated channel. Algorithm 1 shows the steps to find
.
represents the number of subcarriers contained in the range of the empirical coherence bandwidth. The threshold
is used to filter the paths with low power which does not affect the performance of the system.
contains the indexes of the recognizable paths.
represents the process to calculate the BER. Because there is only one optimal
for each
that varies slowly in a short duration in fixed locations, steps 7 to 13 can be conducted independently with offline training.
| Algorithm 1 Finding the optimal input block length according to the estimated channel |
Require: The estimated channel response ; Ensure: Power threshold , Bandwidth of an OFDM symbol W, Training symbol matrix , Channel matrix , , N, ; - 1:
; - 2:
; - 3:
; - 4:
; - 5:
; - 6:
; - 7:
While - 8:
with as block length; - 9:
; - 10:
if - 11:
; - 12:
end if - 13:
; - 14:
return ;
|
After
is decided, the input matrix is the combination of the symbol block and channel block. To input these complex symbols and channels to the real-value NN, the real and imaginary parts of the symbol and channel blocks are extracted and rearranged, which can be written as
where
and
are the
n-th received symbol block and estimated channel block of
k-th training batch.
B is the batch size. Since
is input directly, the network does not need to learn the changing channel characteristics [
25]. Instead, a generative analytical process can be learned to be adaptive to any kind of channel.
Network configurations: As
Figure 4 shows, the single-layered network proposed in this paper contains a fully connected layer with
neurons. To detect a symbol block, the input firstly multiples a weight vector
, then adds bias vectors
, yielding
where
is the activation function. To transform
to the output with required length, another linear map is built:
where
and
are weights and bias of the output layer.
contains
symbols, which are further input with the one-hot format reference symbols to calculate the cross entropy as the loss function, yielding
where
and
are the one-hot reference symbol and the corresponding output data.
M is the modulation order;
is a function to map
to the range
[
28]. The use of cross entropy can make the network converge quickly.
Training strategy: For each
, there are two tasks for the network. One is to find the optimal
and another is to train the parameter matrix
. Both tasks can be finished offline with one training.
Figure 6 shows the training strategy of the network. The samples are constructed with three parts: random data symbols, different types of channels and noise. The channel samples contains Rayleigh distributed ones and underwater acoustic channels collected in the pool, artificial lake, and Wuyuanwan Bay, Xiamen, while the noise includes Gaussian distributed noise and impulsive noise generated by the GAN in [
41].
The network for the given input dimension is trained with the range processed with a step to find the optimal number of neurons . and are lower and upper bound of the possible , respectively. Meanwhile, the optimal weight matrix trained with is memorized. Then both and are delivered to the online network to detect the real received symbols.
Online applications: Unlike the NN-based detector, which takes the only the received symbol as the input, the estimated channel is included in the input in the proposed detector. This configuration offers more information for the network to detect symbols, determining a low-complexity semi-analytical detection network, which is generalized to different channels. Therefore, the final goal of this study was to train the networks which could be independently applied online without retraining. The simulations and experiments are described and discussed below to demonstrate the performance of the proposed structure.
6. Numerical Simulations
The configurations of the simulated system are listed in
Table 3. An OFDM system with the bandwidth 5000 Hz was built. BPSK and QPSK were chosen as the digital modulations. The number of subcarriers, which was 384, should be divisible by
, whereas several possible
s were chosen to build the networks.
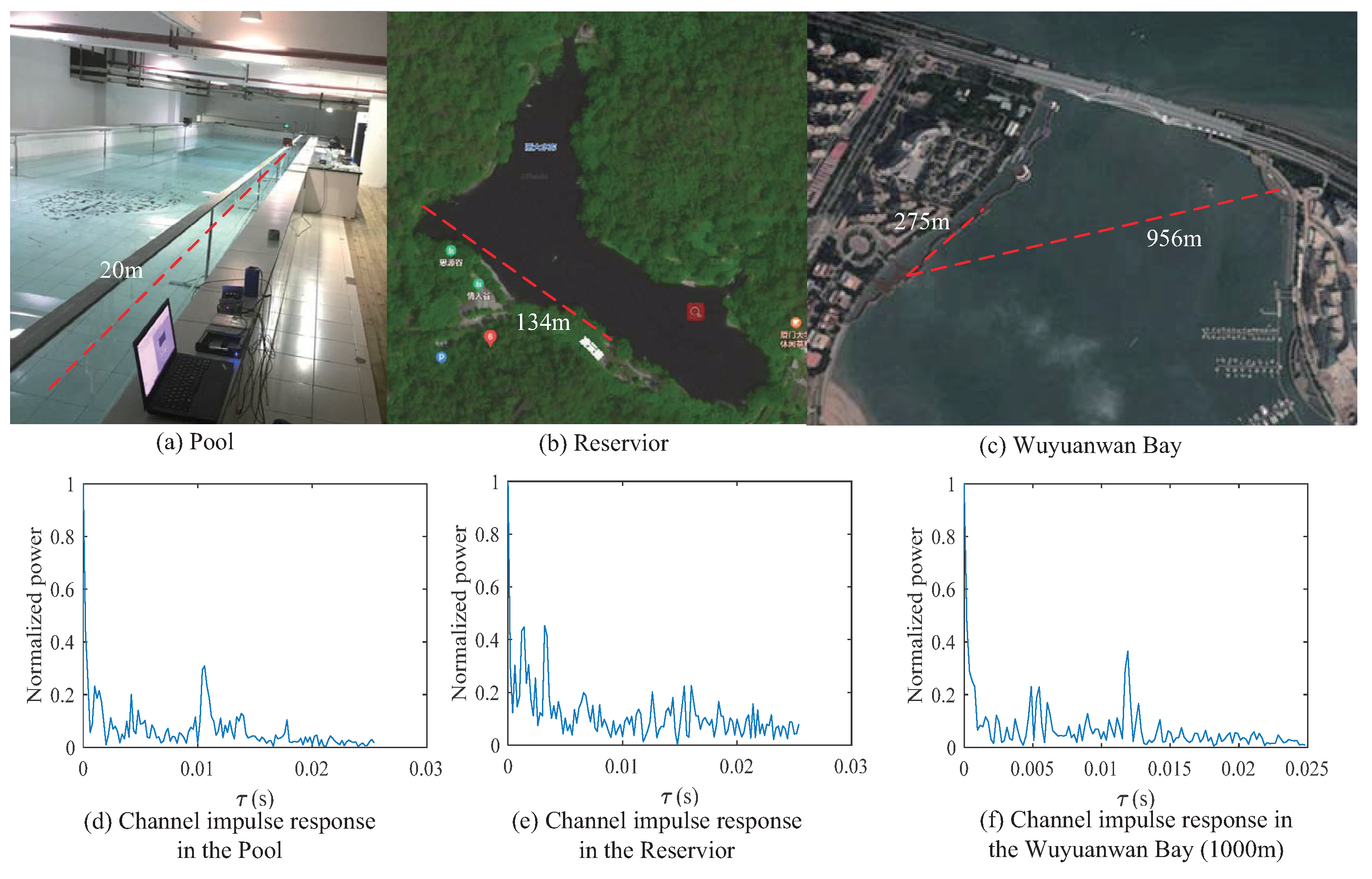
Before comparing the performance, the network was firstly trained with mixed samples. As mentioned in
Section 4, besides Rayleigh channels generated with MATLAB, the real channels collected in the pool, artificial lake, and Wuyuanwan Bay, Xiamen, were taken as samples. All channel samples were mixed randomly in the proportion 1:1:1:1. For Rayleigh channel samples, the maximum CFO was set to 100 Hz. Moreover,
Figure 7a–c shows the real scenarios to collect channels. The average depths of the pool, artificial lake, and testing sea area were 1 m, 5 m, and 8 m, while the depths of the transmitter and the receiver in the three areas were 0.5 m, 0.8 m, and 1.5 m. The only factor which affected the pool channel was the hard wall and bottom made of tiles. In addition, the average wind power in the artificial lake and testing sea area was <level 3. The outdoor tests were all performed in sunny days.
Different distances were covered to obtain different maximum delays shown in
Figure 7d–f. Furthermore, the power threshold
was set to 0.01 to filter the paths with low power.
Taking mixture of the AWGN and impulsive noise generated with the GAN in [
41] as noise samples, the dataset was finally constructed.
Table 4 shows the training parameters for the network. The networks were trained with dynamic SNR and mean square errors (MSE) of the estimated channels. To accelerate convergence, ReLU was taken as the activation function, along with the Adam optimizer. The whole training process was conducted in Python with TensorFlow.
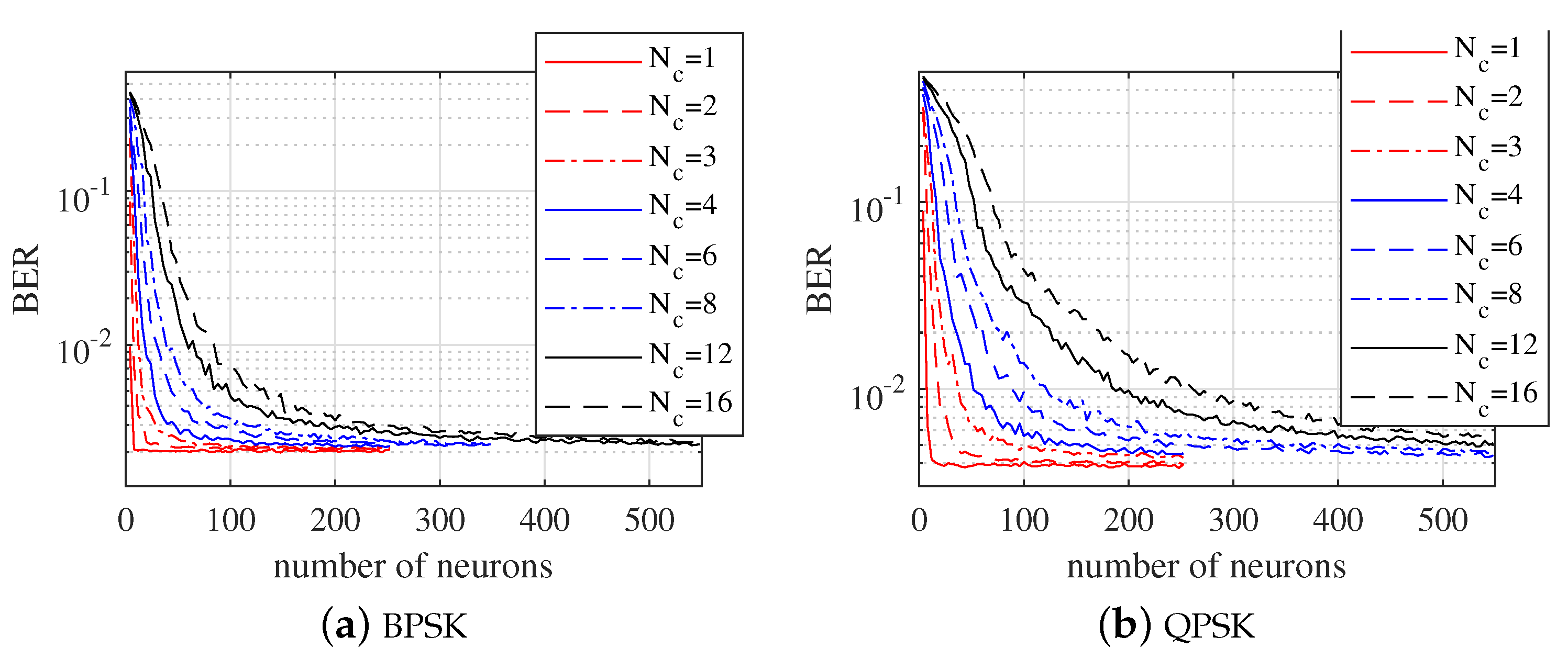
Figure 8 shows the BERs of the given
changing with
. The SNR was 25 dB and the assumed MSE of the channel estimated was 0.004. The step size for
was 4. It can be seen that large input dimensions, such as
and
, required more neurons to reach the best performance. In addition,
for QPSK was larger than that of BPSK. To be clear, the estimated
s from
Figure 8 are listed in
Table 5. For each
, QPSK needed at least 20 more neurons than BPSK.
It should be noted that the optimal
of both modulations in
Figure 8 is 1. This is because the training set contained multiple CIRs, including Rayleigh channels, with different delays. In this situation, the coherence bandwidth of the channel samples was limited to a small value. To further demonstrate the influence of the coherence bandwidth, the trained networks were further used to detect the symbol from the channels with specific maximum delays. The pool channels in
Figure 7a were cut off with lengths of 48, 64, and 77 points, the corresponding
s of which were 8, 6, and 5.
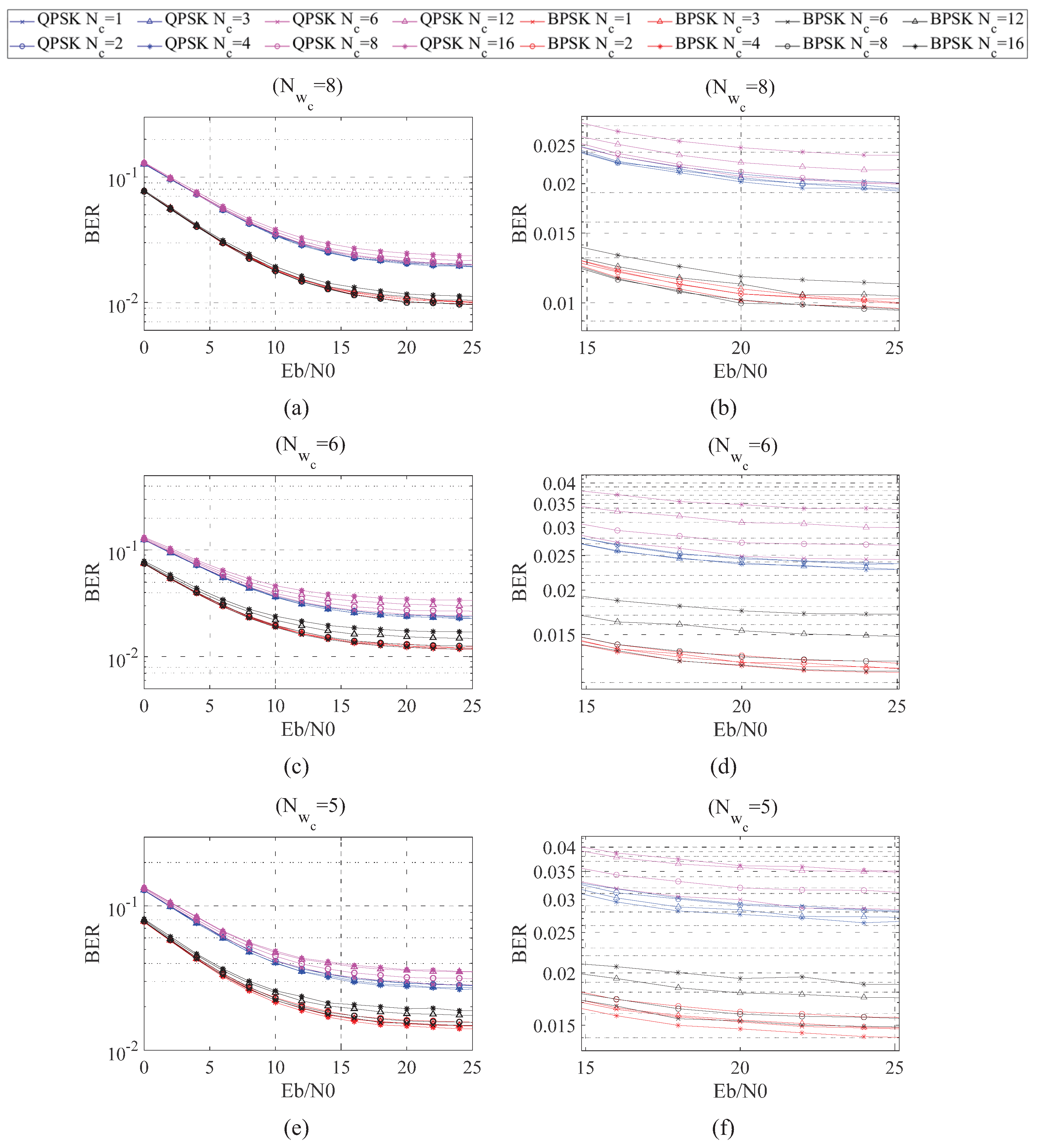
Figure 9a–f show the BERs with different
in BPSK-OFDM and QPSK-OFDM systems. The BER curves of
dB are enlarged in
Figure 9b,d,f. The MSE of the channels estimated was set to 0.01. It can be seen from the figures that the optimal
varies with modulation and
. According to Algorithm 1, the optimal
s are listed in
Table 6. It can be found that in all situations, the networks with
showed poor performance. These results prove the analysis in
Section 4, and further demonstrate the feasibility of Algorithm 1.
In addition, the networks with optimal
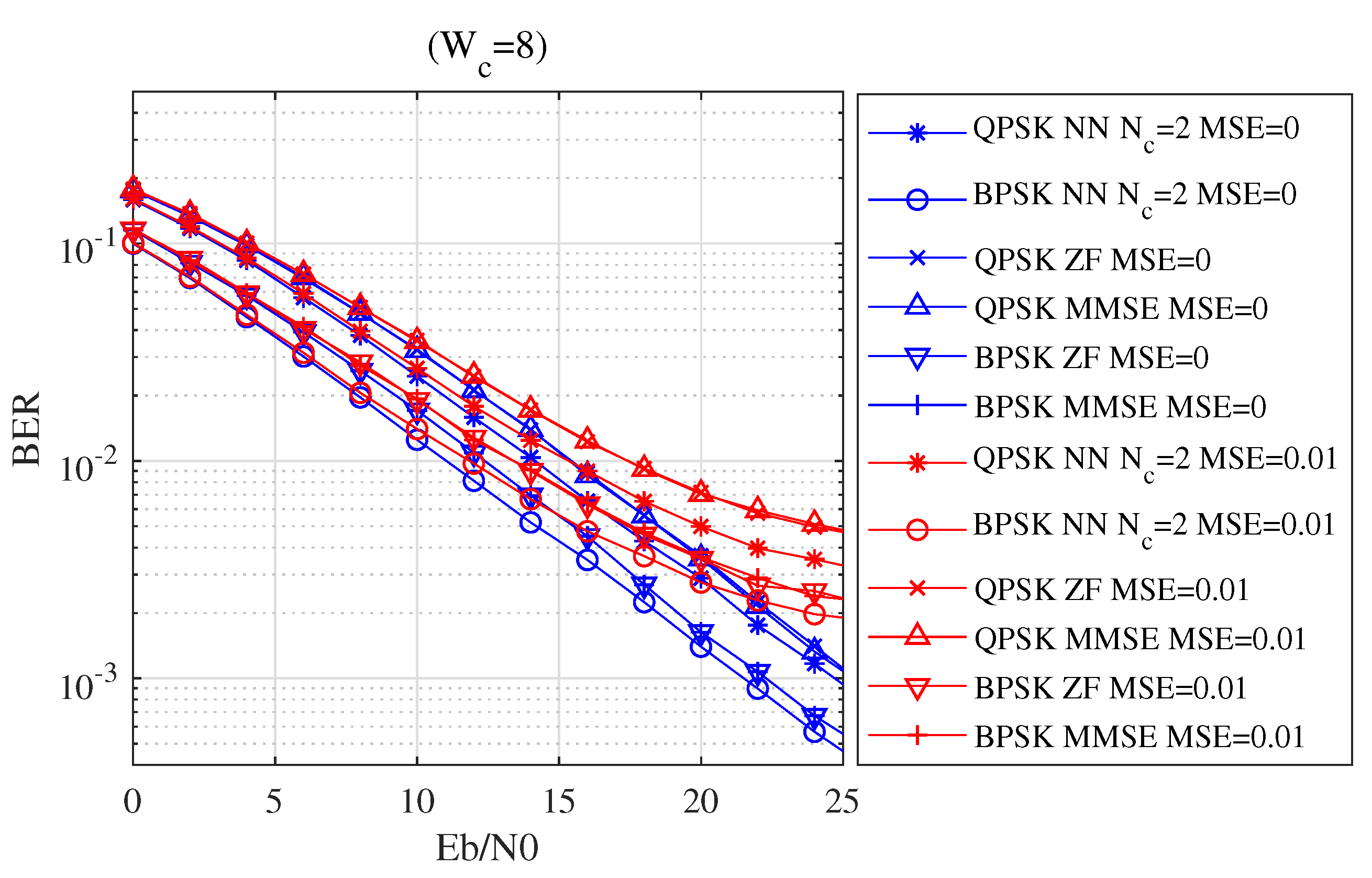
s were compared with the ZF and MMSE equalizers. The pool channel with
was used.
Figure 10 shows the BERs of different equalizers. The proposed network showed lower BERs than the ZF and MMSE equalizers both under perfect channel estimation (MSE = 0) and MSE = 0.01 of the estimated channel. In particular, when SNR = 20 dB and MSE = 0, the BER of QPSK detection network was
lower than that of the ZF and MMSE equalizers, while the BER of BPSK detection network was
lower than that of the ZF and MMSE equalizers. When SNR = 20 dB and MSE = 0.01, the BER of QPSK detection network was
lower than that of the ZF and MMSE equalizers and the BER of BPSK detection network was
lower than that of the ZF and MMSE equalizers. In addition, it can be seen from
Figure 10 that the BER curve of MMSE equalizer for each estimation error is almost the same as the ZF equalizer, which confirms the discussion in
Section 2.
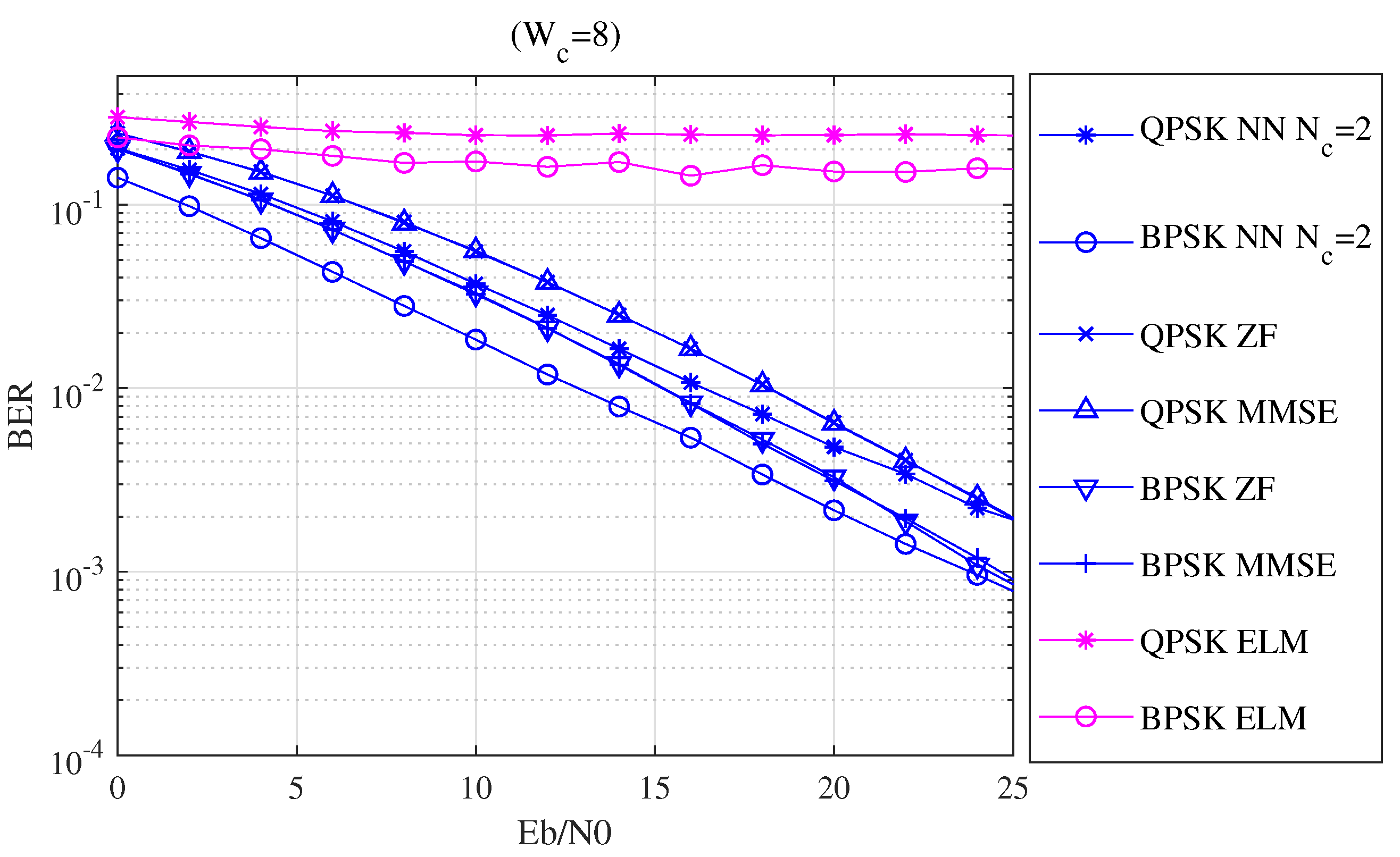
Further, the above equalizers were tested with the LS estimation. The ELM-based detector in [
35] was also compared. All receivers apply the minimum Euclidean distance method to detect symbols.
Figure 11 shows the BER for these detectors. It can be seen that the ELM-based detector showed the worst performance in pool channels. The NN-based receiver still showed low BERs. When SNR = 20 dB, the BERs of NN were lower than ZF and MMSE equalizers for
and
under BPSK and QPSK modulations.
The above results have proved the efficiency of the proposed NN-based detector. Furthermore, the underwater trials introduced in
Section 6 show the practicability of the proposed detector.
7. Underwater Trials
The above systems were first tested in the pool in
Figure 7. The signals were transmitted with the carrier frequency
and the sampling frequency
was
. The parameters shown in
Table 3 were taken to generate baseband signals. The block-type pilots were used for estimation of the time-invariant channels, and the length of cyclic prefixes was 1/3 of the symbol length.
Table 7 lists the BERs of different receivers. It should be noted that not all the NN-based detectors were retrained, which was the same as the trained networks in the last section. The optimal
s for the NN was found to be 2. This was because the hard wall of the pool caused strong reflections that resulted in a small coherence bandwidth. By adjusting the transmitting power, two groups of signals were tested with SNR = 30 dB and 5 dB. The ELM-based receiver still showed the worst performance. It could also be found that the proposed NN showed low BERs in all conditions, while the ZF and MMSE equalizers showed relatively high BERs. Compared with the simulations, the gap of the performance between the proposed NN and other equalizers became smaller. This was because the delays of the real channels were much longer than the simulated ones, which caused intersymbol interference (ISI) besides intra-symbol interference. Because the NN and traditional equalizers are only designed to eliminate the interference in each symbol, the influence of ISI could not be well equalized.
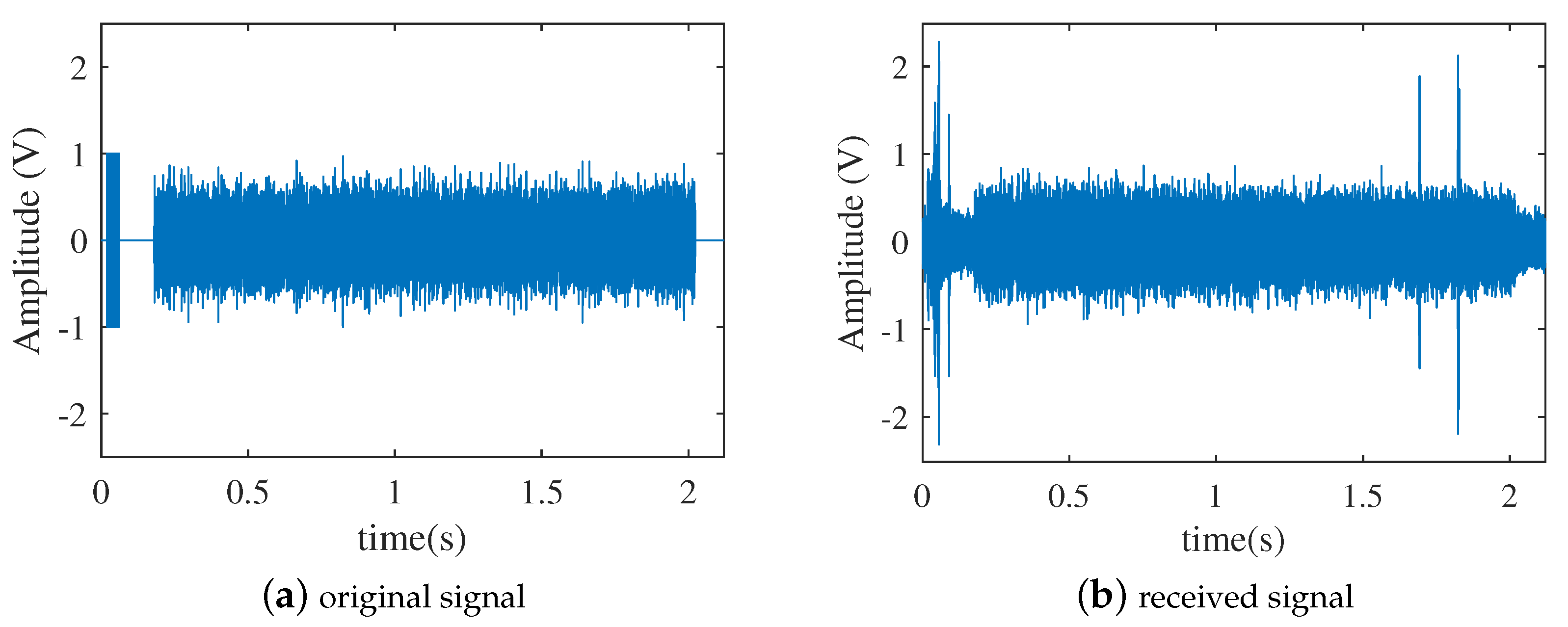
Further, the receivers were tested in real sea. The spot chosen was Xiamen Bay near the location in
Figure 7c and the communication distance was 1 km. In addition to the block-type pilots, the comb-type pilots were applied to make more accurate estimations, for the channels were time-variant in the shallow sea. In addition, the LS estimator was used for both pilot types. The SNR was controlled intentionally to 4.5 dB for comparison of the performances in hostile environments, leading to the received signals in
Figure 12b. The impulse interference can be observed, which severely affects the performance of the receiver.
Table 8 lists the BERs for block-type pilots,
, and for comb-type pilots,
. It can be seen that the received symbols with block-type pilots can hardly be detected with all detectors, although the proposed NN performs best. With comb-type pilots, the results are better. Since the ELM-based detector can only use the block-type pilots, the BERs with comb-type ones are ignored. Nevertheless, the BERs of the NN-based detector are the lowest among all equalizers. These results show the generation of the proposed NN-based detector in different UWA environments.
It can be seen from
Table 8 that compared with the ZF and MMSE equalizers, the proposed NN-based detector shows less difference than
Figure 11. This is because the signals transmitted in sea trials experience more complex interferences caused by the time-variant sound speed field and noise distributions. In this situation, the signals suffer from more distortions than simulations, such as inter-carrier interference (ICI), which should be reduced by other algorithms.
To show the generation of the NN-based detector, the networks were tested with the data transmitted in Xiamen Bay in June 2018. The signals were transmitted at 500 m with level 3 sea conditions. A pair of NI-6341 data acquisition cards were connected with 30 kHz transducers as the transmitter and the receiver, shown in
Figure 12b. The data were modulated by QPSK and the numbers of subcarriers were set as 128 and 512. A comb-type pilot was applied for the LS channel estimation. The NN-based detector was applied to replace the original MMSE equalizer and Euclidean distance detector. The SNR at the receiver was estimated as 32 dB.
Table 9 shows the BERs of different detectors. Both detectors could detect the symbols well and the NN-based detector outperformed the original detector with both 128 and 512 subcarriers.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}