
Accuracy Assessment of Eleven Medium Resolution Global and Regional Land Cover Land Use Products: A Case Study over the Conterminous United States



Abstract
1. Introduction
- (i).
- There is no study explicitly evaluating global LCLU products over the conterminous U.S.
- (ii).
- None of the prior studies assessed accuracy differences over time for products available at multiple time periods.
- (iii).
- None of the prior studies looked at accuracy behavior explicitly in land spatial edge pixels, a more challenging classification task due to potential spectral mixing.
2. Materials
2.1. Reference Dataset for Product Evaluation
2.2. Global Multi-Class LCLU Products
2.3. Global Single-Class LCLU Products
2.4. US-Specific Multi-Class LCLU Products
2.5. US-Specific Single-Class LCLU Products
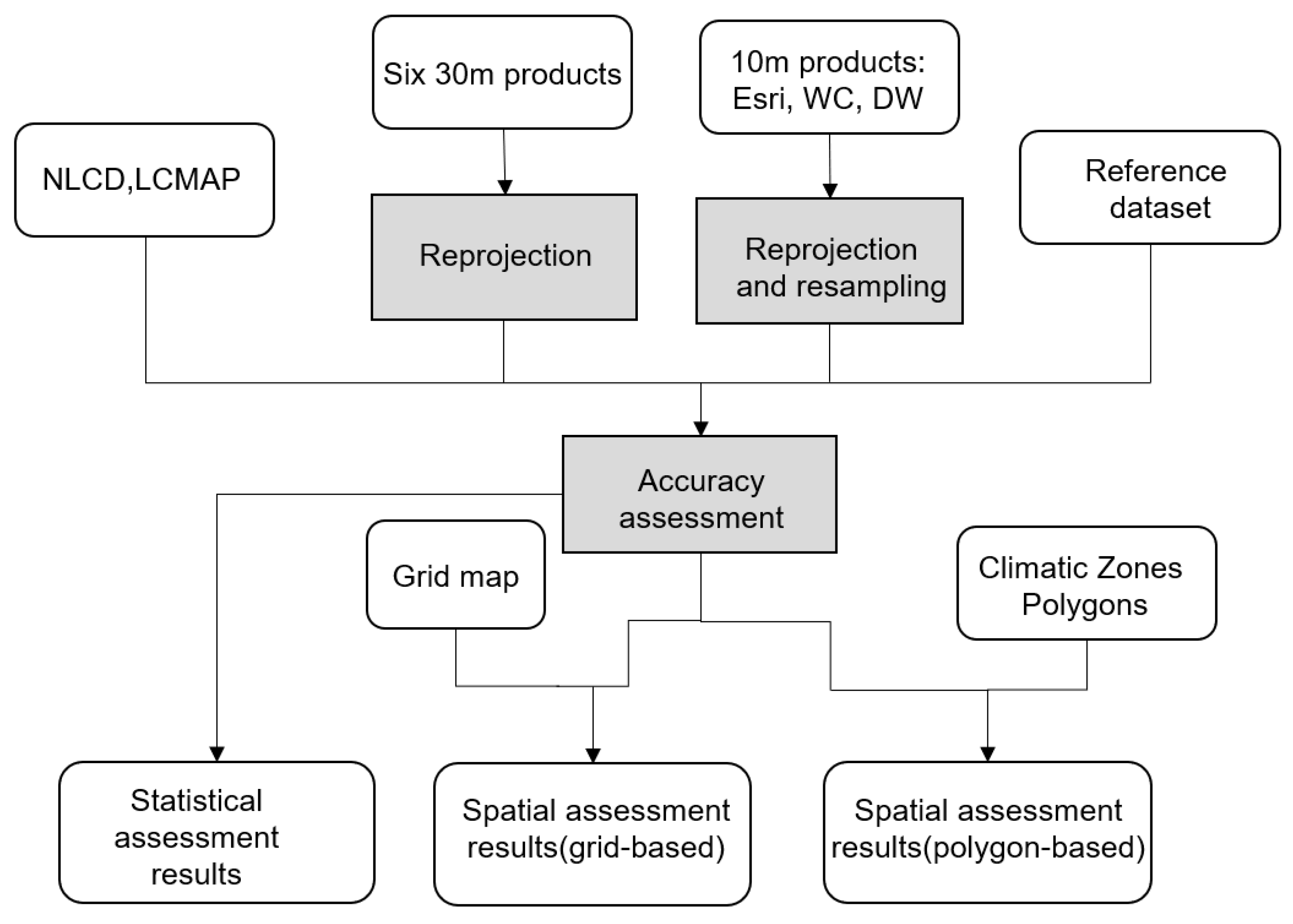
3. Methods
3.1. Classification Scheme Matching
3.2. Spatial Matching through Reprojection
3.3. Spatial Accuracy Assessment
4. Results and Discussion
4.1. Statistical Accuracy Assessment
4.1.1. Multi-Class Accuracy Assessment
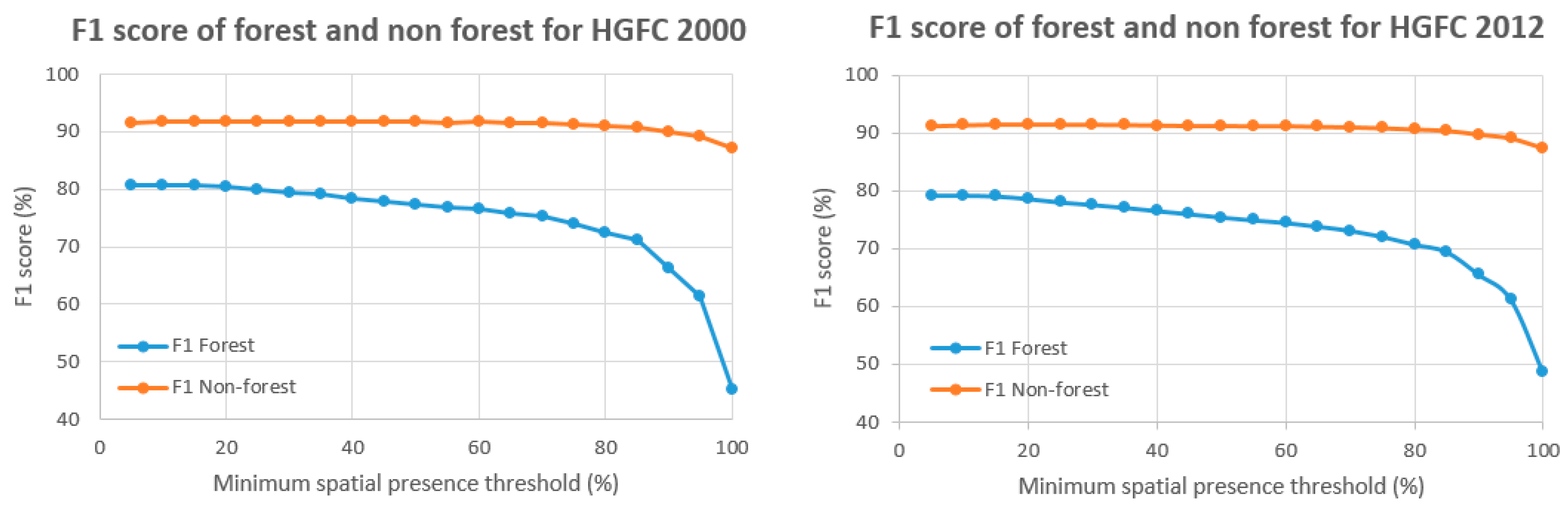
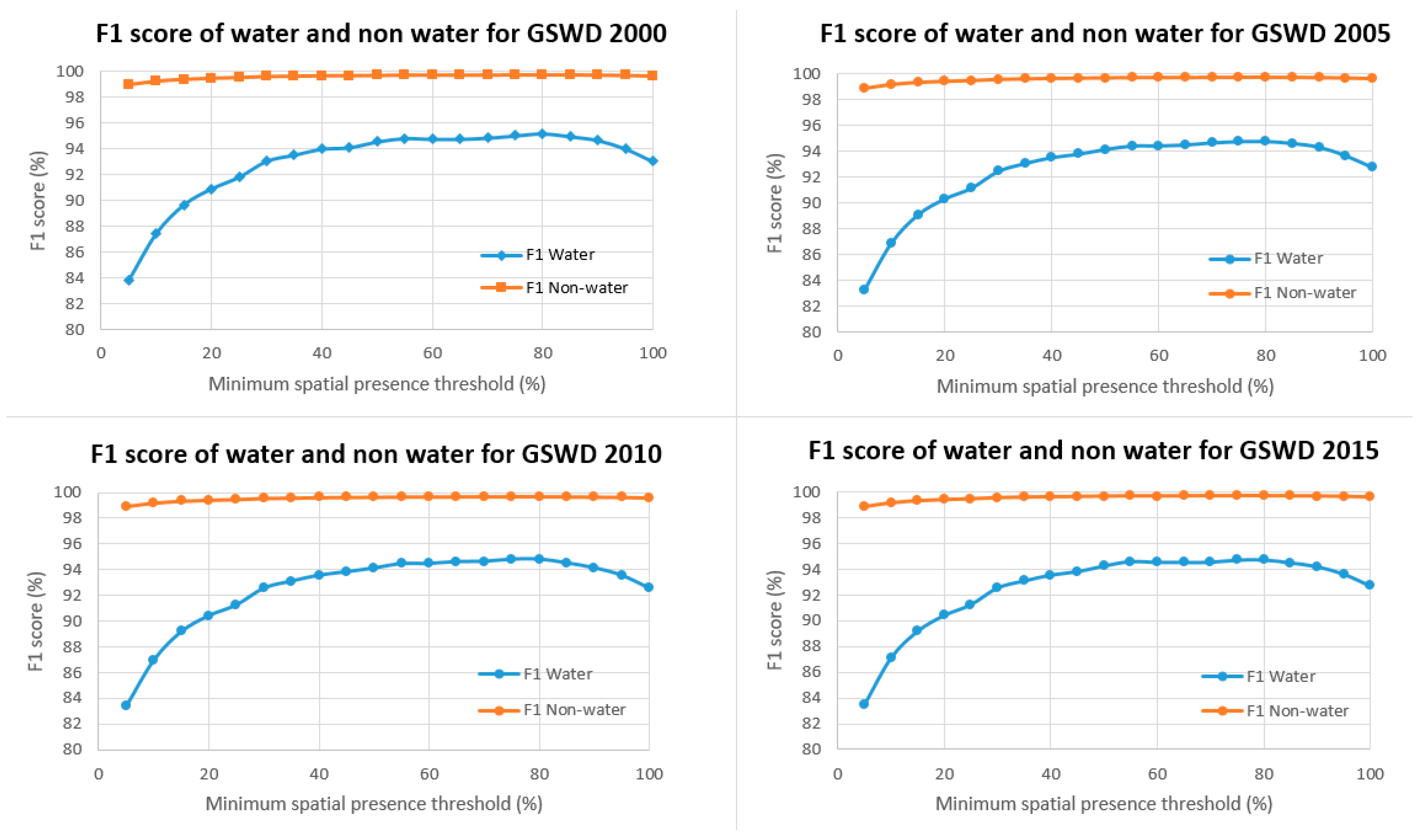
4.1.2. Single Class Accuracy Assessment
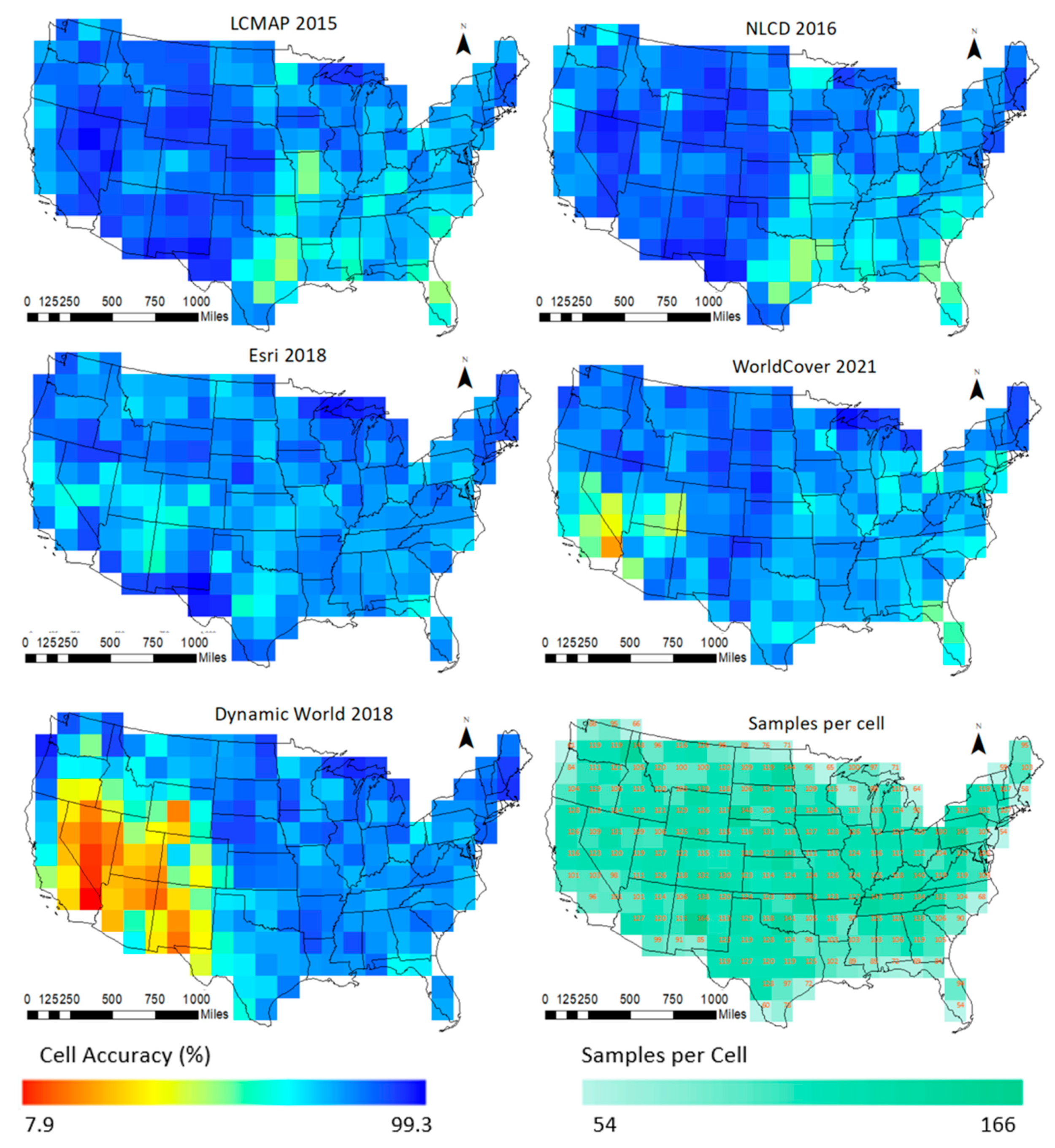
4.2. Spatial Accuracy Assessment
4.2.1. Grid-Based Accuracy Distribution
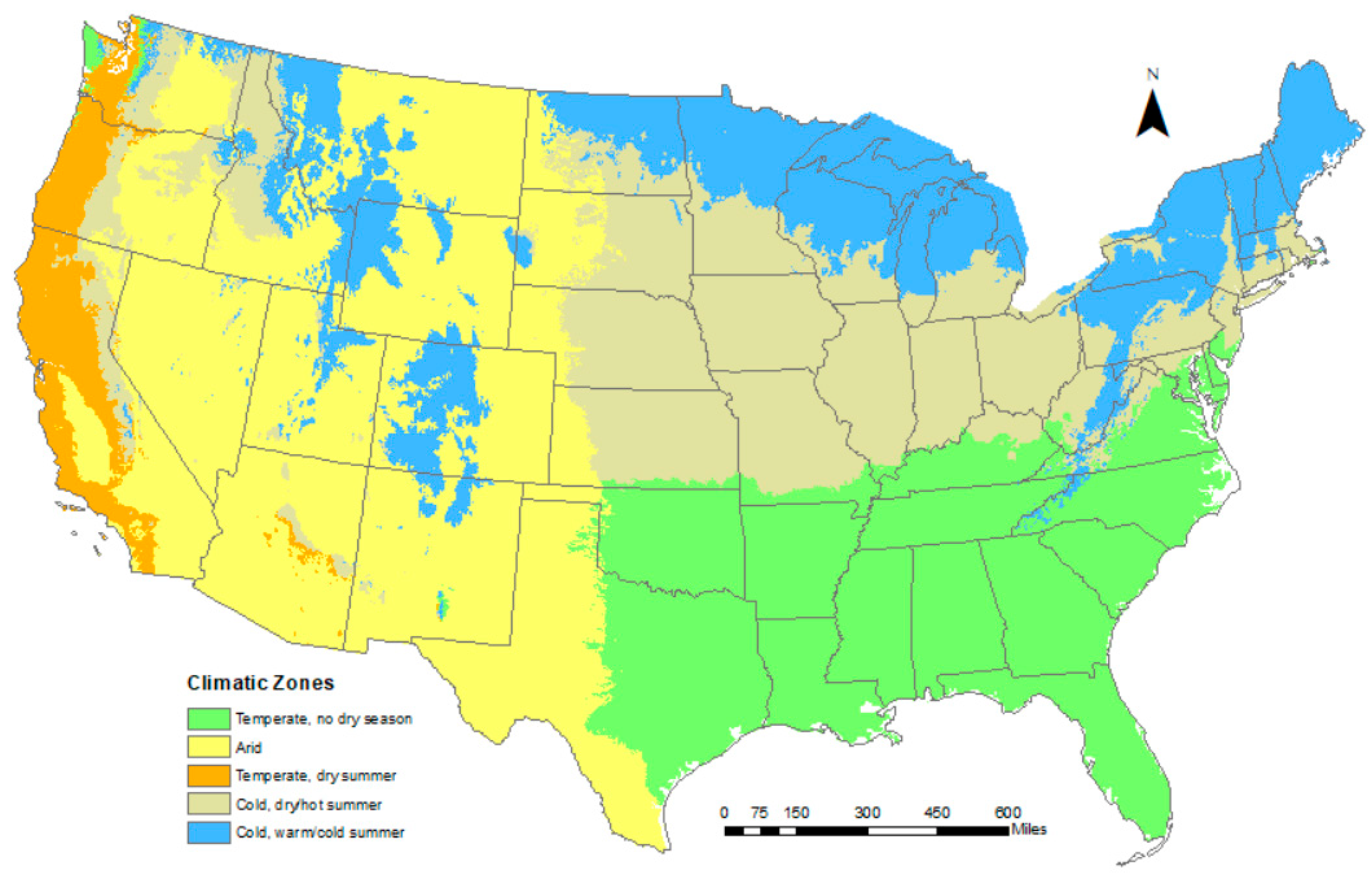
4.2.2. Climatic Zone Accuracy Distribution
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Product Class Definitions
Appendix B. F1 Scores for Thematic LCLU Products over Climatic Zones

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product | Zone | Developed | Cropland | Grass/Shrub | Tree Cover | Water |
|---|---|---|---|---|---|---|
| DW | Temperate, no dry season | 65.6% | 75.3% | 71.6% | 89.4% | 87.8% |
| Arid | 70.1% | 58.1% | 56.3% | 41.6% | 91.8% | |
| Temperate, dry summer | 76.3% | 61.7% | 62.2% | 88.9% | 84.2% | |
| Cold, dry/hot summer | 70.1% | 89.6% | 74.1% | 85.4% | 94.4% | |
| Cold, warm/cold summer | 56.6% | 82.8% | 64.1% | 90.0% | 97.7% | |
| Esri | Temperate, no dry season | 71.3% | 74.9% | 67.1% | 87.5% | 87.0% |
| Arid | 69.9% | 76.7% | 90.0% | 32.0% | 88.1% | |
| Temperate, dry summer | 79.7% | 72.5% | 69.2% | 83.0% | 81.1% | |
| Cold, dry/hot summer | 74.1% | 86.3% | 67.5% | 85.8% | 93.0% | |
| Cold, warm/cold summer | 52.0% | 81.2% | 65.9% | 88.9% | 98.1% | |
| WC | Temperate, no dry season | 30.3% | 77.6% | 67.2% | 86.5% | 84.5% |
| Arid | 56.0% | 82.0% | 85.8% | 71.5% | 88.3% | |
| Temperate, dry summer | 56.6% | 62.7% | 67.9% | 85.3% | 84.8% | |
| Cold, dry/hot summer | 27.7% | 88.2% | 72.7% | 81.8% | 89.9% | |
| Cold, warm/cold summer | 16.7% | 84.3% | 69.8% | 91.3% | 98.0% | |
| LCMAP | Temperate, no dry season | 68.2% | 66.1% | 52.3% | 86.4% | 85.5% |
| Arid | 72.1% | 85.6% | 94.2% | 76.7% | 89.3% | |
| Temperate, dry summer | 82.1% | 79.5% | 72.1% | 84.8% | 87.5% | |
| Cold, dry/hot summer | 72.1% | 85.0% | 68.3% | 87.7% | 93.2% | |
| Cold, warm/cold summer | 50.0% | 78.1% | 64.6% | 90.8% | 97.7% | |
| NLCD | Temperate, no dry season | 73.1% | 67.8% | 53.3% | 84.6% | 89.2% |
| Arid | 67.2% | 88.0% | 94.5% | 74.2% | 89.9% | |
| Temperate, dry summer | 79.0% | 77.7% | 69.0% | 82.9% | 87.5% | |
| Cold, dry/hot summer | 75.2% | 86.0% | 66.8% | 86.7% | 92.0% | |
| Cold, warm/cold summer | 61.5% | 81.6% | 65.3% | 89.5% | 98.6% |
References
- Mueller, R.; Seffrin, R. New methods and satellites: A program update on the NASS cropland data layer acreage program. Intl. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 8. [Google Scholar]
- Sellers, P.J.; Tucker, C.J.; Collatz, G.J.; Los, S.; Justice, C.O.; Dazlich, D.A.; Randall, D. A Revised Land Surface Parameterization (SiB2) for Atmospheric GCMS. Part II: The Generation of Global Fields of Terrestrial Biophysical Parameters from Satellite Data. J. Clim. 1996, 9, 706–737. [Google Scholar] [CrossRef]
- Verburg, P.H.; Neumann, K.; Nol, L. Challenges in using land use and land cover data for global change studies. Glob. Chang. Biol. 2011, 17, 974–989. [Google Scholar] [CrossRef]
- Chapin, F.S., 3rd; Zavaleta, E.S.; Eviner, V.T.; Naylor, R.L.; Vitousek, P.M.; Reynolds, H.L.; Hooper, D.U.; Lavorel, S.; Sala, O.E.; Hobbie, S.E.; et al. Consequences of changing biodiversity. Nature 2000, 405, 234–242. [Google Scholar] [CrossRef]
- Luyssaert, S.; Jammet, M.; Stoy, P.C.; Estel, S.; Pongratz, J.; Ceschia, E.; Churkina, G.; Don, A.; Erb, K.; Ferlicoq, M.; et al. Land management and land-cover change have impacts of similar magnitude on surface temperature. Nat. Clim. Chang. 2014, 4, 389–393. [Google Scholar] [CrossRef]
- Loveland, T.R.; Belward, A.S. The IGBP-DIS global 1km land cover data set, DISCover: First results. Int. J. Remote Sens. 1997, 18, 3289–3295. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Bartholomé, E.; Belward, A.S. GLC2000: A new approach to global land cover mapping from Earth observation data. Int. J. Remote Sens. 2005, 26, 1959–1977. [Google Scholar] [CrossRef]
- Friedl, M.A.; McIver, D.K.; Hodges, J.C.F.; Zhang, X.Y.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A.; et al. Global land cover mapping from MODIS: Algorithms and early results. Remote Sens. Environ. 2002, 83, 287–302. [Google Scholar] [CrossRef]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. MODIS Collection 5 global land cover: Algorithm refinements and characterization of new products. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Tateishi, R.; Hoan, N.T.; Kobayashi, T.; Alsaaideh, B.; Tana, G.; Phong, D.X. Production of global land cover data-GLCNMO2008. J. Geogr. Geol. 2014, 6, 99. [Google Scholar] [CrossRef]
- Arino, O.; Gross, D.; Ranera, F.; Leroy, M.; Bicheron, P.; Brockman, C.; Defourny, P.; Vancutsem, C.; Achard, F.; Weber, J.L. GlobCover: ESA service for global land cover from MERIS. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2412–2415. [Google Scholar]
- Arino, O.; Perez, J.J.R.; Kalogirou, V.; Bontemps, S.; Defourny, P.; Van Bogaert, E. Global Land Cover Map for 2009 (GlobCover 2009). PANGAEA. Available online: https://doi.pangaea.de/10.1594/PANGAEA.787668 (accessed on 1 January 2014).
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Chen, J. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Yu, L.; Wang, J.; Gong, P. Improving 30 m global land-cover map FROM-GLC with time series MODIS and auxiliary data sets: A segmentation-based approach. Int. J. Remote Sens. 2013, 34, 5851–5867. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global land use/land cover with Sentinel 2 and deep learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4704–4707. [Google Scholar]
- Zanaga, D.; Van De Kerchove, R.; Daems, D.; De Keersmaecker, W.; Brockmann, C.; Kirches, G.; Wevers, J.; Cartus, O.; Santoro, M.; Fritz, S.; et al. ESA WorldCover 10 m 2021 v200. Available online: https://zenodo.org/record/7254221 (accessed on 1 January 2022).
- Zanaga, D.; Van De Kerchove, R.; De Keersmaecker, W.; Souverijns, N.; Brockmann, C.; Quast, R.; Wevers, J.; Grosu, A.; Paccini, A.; Vergnaud, S.; et al. ESA WorldCover 10 m 2020 V100. OpenAIRE 2021. Available online: https://www.openaire.eu/ (accessed on 30 April 2023).
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- Homer, C.; Dewitz, J.; Yang, L.; Jin, S.; Danielson, P.; Xian, G.; Coulston, J.W.; Herold, N.; Wickham, J.D.; Megown, K. Completion of the 2011 National Land Cover Database for the conterminous United States–representing a decade of land cover change information. Photogramm. Eng. Remote Sens. 2015, 81, 345–354. [Google Scholar]
- Healey, S.P.; Cohen, W.B.; Yang, Z.; Brewer, C.K.; Brooks, E.B.; Gorelick, N.; Hernandez, A.J.; Huang, C.; Hughes, M.J.; Kennedy, R.E.; et al. Mapping forest change using stacked generalization: An ensemble approach. Remote Sens. Environ. 2018, 204, 717–728. [Google Scholar] [CrossRef]
- Brown, J.F.; Tollerud, H.J.; Barber, C.P.; Zhou, Q.; Dwyer, J.L.; Vogelmann, J.E.; Loveland, T.R.; Woodcock, C.E.; Stehman, S.V.; Zhu, Z.; et al. Lessons learned implementing an operational continuous United States national land change monitoring capability: The Land Change Monitoring, Assessment, and Projection (LCMAP) approach. Remote Sens. Environ. 2020, 238, 111356. [Google Scholar] [CrossRef]
- Panagos, P.; Meusburger, K.; Ballabio, C.; Borrelli, P.; Alewell, C. Soil erodibility in Europe: A high-resolution product based on LUCAS. Sci. Total Environ. 2014, 479, 189–200. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Xiao, P.; Feng, X.; Li, H. Accuracy assessment of seven global land cover datasets over China. ISPRS J. Photogramm. Remote Sens. 2017, 125, 156–173. [Google Scholar] [CrossRef]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some challenges in global land cover mapping: An assessment of agreement and accuracy in existing 1 km products. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Bai, Y.; Feng, M.; Jiang, H.; Wang, J.; Zhu, Y.; Liu, Y. Assessing Consistency of Five Global Land Cover Data Sets in China. Remote Sens. 2014, 6, 8739–8759. [Google Scholar] [CrossRef]
- Tsendbazar, N.; de Bruin, S.; Mora, B.; Schouten, L.; Herold, M. Comparative assessment of thematic accuracy of GLC maps for specific applications using existing reference data. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 124–135. [Google Scholar] [CrossRef]
- Liang, L.; Liu, Q.; Liu, G.; Li, H.; Huang, C. Accuracy Evaluation and Consistency Analysis of Four Global Land Cover Products in the Arctic Region. Remote Sens. 2019, 11, 1396. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, L.; Zhang, X.; Chen, X.; Mi, J.; Xie, S. Consistency analysis and accuracy assessment of three global 30-m land-cover products over the European Union using the LUCAS product. Remote Sens. 2020, 12, 3479. [Google Scholar] [CrossRef]
- Zhang, C.; Dong, J.; Ge, Q. Quantifying the accuracies of six 30-m cropland products over China: A comparison and evaluation analysis. Comput. Electron. Agric. 2022, 197, 106946. [Google Scholar] [CrossRef]
- Pengra, B.W.; Stehman, S.V.; Horton, J.A.; Dockter, D.J.; Schroeder, T.A.; Yang, Z.; Hernandez, A.J.; Healey, S.P.; Cohen, W.B.; Finco, M.V.; et al. LCMAP Reference Data Product 1984–2018 Land Cover, Land Use and Change Process Attributes (ver. 1.2, November 2021): U.S. Geological Survey Data Release; U.S. Geological Survey: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Stehman, S.V.; Pengra, B.W.; Horton, J.A.; Wellington, D.F. Validation of the US Geological Survey’s Land Change Monitoring, Assessment and Projection (LCMAP) Collection 1.0 annual land cover products 1985–2017. Remote Sens. Environ. 2021, 265, 112646. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Joint Response Design for TimeSync Reference Data Collection; U.S. Geological Survey: Sioux Falls, SD, USA, 2019. Available online: www.usgs.gov/media/files/joint-response-design-timesync-reference-data-collection (accessed on 30 July 2021).
- Cohen, W.B.; Yang, Z.; Kennedy, R. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 2. TimeSync—Tools for calibration and validation. Remote Sens. Environ. 2010, 114, 2911–2924. [Google Scholar] [CrossRef]
- Pengra, B.W.; Stehman, S.V.; Horton, J.A.; Dockter, D.J.; Schroeder, T.A.; Yang, Z.; Cohen, W.B.; Healey, S.P.; Loveland, T.R. Quality control and assessment of interpreter consistency of annual land cover reference data in an operational national monitoring program. Remote Sens. Environ. 2020, 238, 111261. [Google Scholar] [CrossRef]
- Czaplewski, R.L. Accuracy assessment of maps of forest condition: Statistical design and methodological considerations. In Remote Sensing of Forest Environments: Concepts and Case Studies; Springer: New York, NY, USA, 2003; pp. 115–140. [Google Scholar]
- Yu, L.; Du, Z.; Dong, R.; Zheng, J.; Tu, Y.; Chen, X.; Hao, P.; Zhong, B.; Peng, D.; Gong, P. FROM-GLC Plus: Toward near real-time and multi-resolution land cover mapping. GIScience Remote Sens. 2022, 59, 1026–1047. [Google Scholar] [CrossRef]
- Brovelli, M.A.; Molinari, M.E.; Hussein, E.; Chen, J.; Li, R. The First Comprehensive Accuracy Assessment of GlobeLand30 at a National Level: Methodology and Results. Remote Sens. 2015, 7, 4191–4212. [Google Scholar] [CrossRef]
- Han, G.; Chen, J.; He, C.; Li, S.; Wu, H.; Liao, A.; Peng, S. A web-based system for supporting global land cover data production. ISPRS J. Photogramm. Remote Sens. 2015, 103, 66–80. [Google Scholar] [CrossRef]
- Chen, J.; Cao, X.; Peng, S.; Ren, H. Analysis and Applications of GlobeLand30: A Review. ISPRS Int. J. Geo-Inf. 2017, 6, 230. [Google Scholar] [CrossRef]
- Pickens, A.H.; Hansen, M.C.; Hancher, M.; Stehman, S.V.; Tyukavina, A.; Potapov, P.; Marroquin, B.; Sherani, Z. Mapping and sampling to characterize global inland water dynamics from 1999 to 2018 with full Landsat time-series. Remote Sens. Environ. 2020, 243, 111792. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, X.; Gao, Y.; Chen, X.; Shuai, X.; Mi, J. Finer-resolution mapping of global land cover: Recent developments, consistency analysis, and prospects. J. Remote Sens. 2021, 2021, 5289697. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Howard, S.M.; Yang, L.; Larson, C.R.; Wylie, B.K.; Van Driel, N. Completion of the 1990s Na-tional Land Cover Data Set for the conterminous United States from Landsat Thematic Mapper data and ancillary data sources. Photogramm. Eng. Remote Sens. 2001, 67, 6. [Google Scholar]
- Anderson, J.R. A Land Use and Land Cover Classification System for Use with Remote Sensor Data (Vol. 964); US Government Printing Office: Washington, DC, USA, 1976. [Google Scholar]
- Fry, J.; Coan, M.; Homer, C.G.; Meyer, D.K.; Wickham, J. Completion of the National Land Cover Database (NLCD) 1992–2001 Land Cover Change Retrofit Product; U.S. Geological Survey: Reston, VA, USA, 2008. [Google Scholar] [CrossRef]
- Wickham, J.; Stehman, S.; Fry, J.; Smith, J.; Homer, C. Thematic accuracy of the NLCD 2001 land cover for the conterminous United States. Remote Sens. Environ. 2010, 114, 1286–1296. [Google Scholar] [CrossRef]
- Wickham, J.D.; Stehman, S.V.; Gass, L.; Dewitz, J.; Fry, J.A.; Wade, T.G. Accuracy assessment of NLCD 2006 land cover and impervious surface. Remote Sens. Environ. 2013, 130, 294–304. [Google Scholar] [CrossRef]
- Wickham, J.; Stehman, S.V.; Gass, L.; Dewitz, J.A.; Sorenson, D.G.; Granneman, B.J.; Poss, R.V.; Baer, L.A. Thematic accuracy assessment of the 2011 National Land Cover Database (NLCD). Remote Sens. Environ. 2017, 191, 328–341. [Google Scholar] [CrossRef]
- Wickham, J.; Stehman, S.V.; Sorenson, D.G.; Gass, L.; Dewitz, J.A. Thematic accuracy assessment of the NLCD 2016 land cover for the conterminous United States. Remote Sens. Environ. 2021, 257, 112357. [Google Scholar] [CrossRef]
- Dwyer, J.L.; Roy, D.P.; Sauer, B.; Jenkerson, C.B.; Zhang, H.K.; Lymburner, L. Analysis Ready Data: Enabling Analysis of the Landsat Archive. Remote Sens. 2018, 10, 1363. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Boryan, C.; Yang, Z.; Mueller, R.; Craig, M. Monitoring US agriculture: The US Department of Agriculture, National Agricultural Statistics Service, Cropland Data Layer Program. Geocarto Int. 2011, 26, 341–358. [Google Scholar] [CrossRef]
- Boryan, C.G.; Yang, Z. Deriving crop specific covariate data sets from multi-year NASS geospatial cropland data layers. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4225–4228. [Google Scholar] [CrossRef]
- Xian, G.Z.; Smith, K.; Wellington, D.; Horton, J.; Zhou, Q.; Li, C.; Auch, R.; Brown, J.F.; Zhu, Z.; Reker, R.R. Implementation of the CCDC algorithm to produce the LCMAP Collection 1.0 annual land surface change product. Earth Syst. Sci. Data 2022, 14, 143–162. [Google Scholar] [CrossRef]
- Brown, J.F. LCMAP Collection 1.1 Science Product Guide. 2022. Available online: https://www.usgs.gov/media/files/lcmap-science-product-guide (accessed on 9 February 2022).
- Brown, J.F. LSDS-1424 LCMAP Data Format Control Book (DFCB). 2022. Available online: https://www.usgs.gov/media/files/lcmap-dfcb (accessed on 9 February 2022).
- Czaplewski, R.L. Misclassification bias in areal estimates. Photogramm. Eng. Remote Sens. 1992, 58, 189–192. [Google Scholar]
- Muller, S.V.; Walker, D.A.; Nelson, F.E.; Auerback, N.A.; Bockheim, J.G.; Guyer, S.; Sherba, D. Accuracy as-sessment of a land-cover map of the Kuparuk river basin, Alaska: Considerations for remote regions. Photogramm. Eng. Remote Sens. 1998, 64, 619–628. [Google Scholar]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Todd, W.J.; Gehring, D.G.; Haman, J.F. Landsat wildland mapping accuracy. Photogramm. Eng. Remote Sens. 1980, 46, 509–520. [Google Scholar]
- Scepan, J. Thematic validation of high-resolution global land-cover data sets. Photogramm. Eng. Remote Sens. 1999, 65, 1051–1060. [Google Scholar]
- Loveland, T.R.; Zhu, Z.; Ohlen, D.O.; Brown, J.F.; Reed, B.C.; Yang, L. An analysis of the IGBP global land-cover characterization process. Photogramm. Eng. Remote Sens. 1999, 65, 1021–1032. [Google Scholar]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Wang, L.; Bartlett, P.; Pouliot, D.; Chan, E.; Lamarche, C.; Wulder, M.A.; Defourny, P.; Brady, M. Comparison and Assessment of Regional and Global Land Cover Products for Use in CLASS over Canada. Remote Sens. 2019, 11, 2286. [Google Scholar] [CrossRef]
- Beck, H.E.; Zimmermann, N.E.; McVicar, T.R.; Vergopolan, N.; Berg, A.; Wood, E.F. Present and future Kö-ppen-Geiger climate classification maps at 1-km resolution. Sci. Data 2018, 5, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. [Google Scholar] [CrossRef]
- Wickham, J.; Stehman, S.; Smith, J.; Yang, L. Thematic accuracy of the 1992 National Land-Cover Data for the western United States. Remote Sens. Environ. 2004, 91, 452–468. [Google Scholar] [CrossRef]
- OpenStreetMap contributors. Planet Dump. 2020. Available online: https://planet.openstreetmap.org (accessed on 30 April 2023).
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Bunting, P.; Rosenqvist, A.; Lucas, R.M.; Rebelo, L.M.; Hilarides, L.; Thomas, N.; Hardy, A.; Itoh, T.; Shimada, M.; Finlayson, C.M. The Global Mangrove Watch—A New 2010 Global Baseline of Mangrove Extent. Remote Sens. 2018, 10, 1669. [Google Scholar] [CrossRef]
- Corbane, C.; Sabo, F.; Politis, P.; Syrris, V. GHS-BUILT-S2 R2020A-GHS Built-Up Grid, Derived from Sentinel-2 Global Image Composite for Reference Year 2018 using Convolutional Neural Networks (GHS-S2Net); European Commission, Joint Research Centre (JRC): Brussels, Belgium, 2020. [Google Scholar]
- Chauhan, N.K.; Singh, K. A review on conventional machine learning vs. deep learning. In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies, GUCON 2018, Greater Noida, India, 28–29 September 2018; pp. 347–352. [Google Scholar] [CrossRef]
- Wang, P.; Fan, E.; Wang, P. Comparative analysis of image classification algorithms based on traditional machine learning and deep learning. Pattern Recognit. Lett. 2021, 141, 61–67. [Google Scholar] [CrossRef]
- Egorov, A.V.; Roy, D.P.; Zhang, H.K.; Li, Z.; Yan, L.; Huang, H. Landsat 4, 5 and 7 (1982 to 2017) Analysis Ready Data (ARD) Observation Coverage over the Conterminous United States and Implications for Terrestrial Monitoring. Remote Sens. 2019, 11, 447. [Google Scholar] [CrossRef]






| Product | Time | Resolution | Reference |
|---|---|---|---|
| IGBP DISCover | 1992–1993 | 1 km | [6,7] |
| UMD | 1992–1993 | 1 km | [8] |
| GLC | 2000 | 1 km | [9] |
| MODIS LC | 2001–2013 | 500/1000 m | [10,11] |
| GLCNMO | 2003/2008 | 500 m | [12] |
| GlobCover | 2005/2006/2009 | 300 m | [13,14] |
| FROM-GLC | 2010/2015/2017 | 30 m | [15,16] |
| GlobeLand30 | 2000/2010 | 30 m | [17] |
| Esri | 2017–2021 | 10 m | [18] |
| WC | 2020/2021 | 10 m | [19,20] |
| DW | 2015–2023 | 10 m | [21] |
| Samples | Developed | Cropland | Grass/Shrub | Tree Cover | Water | Wetland | Barren |
|---|---|---|---|---|---|---|---|
| All | 1372 | 4363 | 9491 | 6980 | 1333 | 1241 | 217 |
| Spatial edge | 688 | 919 | 1789 | 2361 | 147 | 414 | 62 |
| Products | Esri | WC | DW | GlobeLand30 | FROMGLC | NLCD | LCMAP | HGFC | GSWD | GAIA | CDL |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sensor | Sentinel 2 | Sentinel 1/2 | Sentinel 2 | Landsat TM/ETM+, HJ-1 | Landsat TM, ETM+, OLI | Landsat TM, ETM+, OLI | Landsat TM, ETM+, OLI | Landsat TM, ETM+, OLI | Landsat TM, ETM+, OLI | Landsat TM, ETM+, OLI | Landsat TM, ETM+ OLI, AWiFS, MODIS |
| Spatial resolution | 10 m | 10 m | 10 m | 30 m | 30 m | 30 m | 30 m | 30 m | 30 m | 30 m | 30 m |
| Spatial extent | Global | Global | Global | Global | Global | US-only | US-only | Global | Global | Global | US-only |
| Available Years | Annual 2017–2021 | 2020, 2021 | Annual 2015–2022 | 2000, 2010 | 2010, 2015, 2017 | 92,200-1 4,6,8,11,13,16,19 | Annual 1985–2021 | Annual 2000–2021 | Annual 1999–2018 | Annual 1985–2018 | Annual 1997–2021 |
| Included Years | 2018 | 2020, 2021 | 2018 | 2000,2010 | 2010, 2015 | 1992, 2001, 2011, 2016 | 1990, 1995, 2000, 2005,2010,2015 | 2000, 2012 | 2000, 2005, 2010, 2015 | 1990, 2000, 2010, 2015 | 2010, 2015 |
| Multi/Single-Class | Multi | Multi | Multi | Multi | Multi | Multi | Multi | Single | Single | Single | Single |
| Classes | 9 | 11 | 9 | 10 | A unique land cover classification scheme | Anderson Level II | Anderson Level I | Percent + binary for gain and loss | Percent | binary | 255 |
| Classifier | AI | RF | AI | Pixel- and object-based | Various | DT | CCDC | DT | Tree-based | Google Earth Engine | DT |
| Reference | [18] | [19] | [21] | [42] | [15] | [52] | [34] | [46] | [43] | [44] | [56] |
| LCMAP | NLCD | FROM-GLC | GlobeLand30 | Esri | Dynamic World | World Cover |
|---|---|---|---|---|---|---|
| Developed | Developed | Impervious | Artificial surfaces | Built Area | Built Area | Built-up Urban green such as parks not included |
| Cropland | Planted/Cultivated | Cropland; Orchards * Fruit trees not included, classified as forests (except for orchards) | Cultivated land | Crops Crops at tree height not included (e.g., fruit trees) | Crops Crops at tree height not included (e.g., fruit trees) | Cropland Perennial woody crops and greenhouses not included |
| Grass/Shrub | Shrubland; Herbaceous 20% vs. 10% LCMAP threshold | Grasslands; Shrublands; Tundra ^ | Grassland; Shrubland; Tundra | Rangeland ^ | Grass; Shrub/Scrub ^ Parks, golf courses, baseball included but LCMAP assigns them as Developed | Grassland; Shrubland; Moss and Lichen |
| Tree cover | Forest 20% vs. 10% LCMAP threshold | Broadleaf; Needleleaf; Mixed Forest ^* | Forest | Trees Dense tall vegetation in swamps or mangroves included | Trees ^ Dense tall vegetation in swamps or mangroves, fruit trees included | Tree cover Prioritizes trees, includes trees present with other classes (built-up, woody crops, flooded trees) |
| Water | Open Water * | Waterbodies | Water bodies | Water | Water | Permanent waterbodies |
| Wetland | Wetlands | Wetlands Forest wetland not included | Wetland | Flooded vegetation Swamp forests not included, includes heavily irrigated and inundated agriculture | Flooded vegetation Swamp forests not included | Herbaceous Wetland; Mangroves Swamp forests not included |
| Barren | Barren 15% vs. 10% LCMAP threshold | Barren land ^ Lake/river bottoms in dry season included | Bare land Saline/Alkaline land included | Bare ground ^ Dried lake beds, mines included | Bare ground ^ Dried lake bottoms, mines, large empty urban lots, dirt roads included | Bare/sparse vegetation |
| # | Group Description | Corresponding Köppen–Geiger Class Code |
|---|---|---|
| 1 | Temperate, no dry season | 1, 2, 3, 14, 15, 16 |
| 2 | Arid | 4, 5, 6, 7 |
| 3 | Temperate, dry summer | 8, 9, 10 |
| 4 | Cold, dry/hot summer | 17, 18, 19, 21, 22, 25 |
| 5 | Cold, warm/cold summer | 26, 27, 29 |
| Products | F1 Score | ||||||
|---|---|---|---|---|---|---|---|
| Developed | Cropland | Grass/Shrub | Tree Cover | Water | Wetland | Barren | |
| NLCD 1992 | 49.3% | 73.2% | 78.8% | 81.0% | 92.1% | 62.6% | 27.7% |
| NLCD 2001 | 70.3% | 79.8% | 83.4% | 86.0% | 95.6% | 77.0% | 55.1% |
| NLCD 2011 | 72.1% | 80.7% | 83.4% | 85.2% | 95.4% | 76.9% | 56.4% |
| NLCD 2016 | 72.1% | 81.2% | 83.6% | 85.0% | 95.5% | 76.9% | 56.2% |
| LCMAP 1990 | 68.2% | 80.2% | 83.6% | 87.0% | 94.6% | 71.5% | 47.2% |
| LCMAP 1995 | 69.4% | 80.3% | 83.9% | 87.2% | 94.5% | 71.5% | 48.5% |
| LCMAP 2000 | 70.1% | 80.3% | 84.0% | 86.9% | 94.6% | 71.8% | 48.2% |
| LCMAP 2005 | 70.1% | 79.6% | 83.9% | 86.6% | 94.2% | 70.9% | 49.5% |
| LCMAP 2010 | 69.8% | 79.2% | 83.6% | 86.4% | 94.3% | 71.2% | 50.0% |
| LCMAP 2015 | 69.5% | 79.1% | 83.4% | 85.9% | 94.4% | 71.1% | 50.1% |
| FROMGLC 2010 | 4.8% | 35.5% | 24.8% | 63.2% | 81.4% | 5.5% | 7.4% |
| FROMGLC 2015 | 45.3% | 63.3% | 68.9% | 77.6% | 91.1% | 3.3% | 16.5% |
| GlobeLand30 2000 | 54.5% | 76.4% | 79.6% | 80.4% | 76.1% | 63.4% | 35.7% |
| GlobeLand30 2010 | 56.2% | 75.8% | 79.5% | 79.5% | 76.0% | 62.9% | 37.2% |
| Esri 2018 | 70.8% | 80.7% | 80.8% | 78.7% | 94.5% | 11.7% | 49.5% |
| WC 2020 | 33.1% | 86.3% | 80.8% | 83.0% | 95.5% | 18.2% | 25.2% |
| WC 2021 | 34.1% | 84.0% | 78.9% | 80.1% | 94.3% | 17.1% | 27.6% |
| DW 2018 | 67.6% | 77.0% | 61.5% | 79.7% | 94.9% | 8.0% | 13.2% |
| User’s Accuracy | Producer’s Accuracy | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Developed | Cropland | Grass/Shrub | Tree Cover | Water | Developed | Cropland | Grass/Shrub | Tree Cover | Water | |
| NLCD 1992 | 74.6% | 62.5% | 85.4% | 81.2% | 92.7% | 36.8% | 88.3% | 73.1% | 80.8% | 91.5% |
| NLCD 2001 | 67.8% | 71.0% | 87.2% | 92.0% | 96.7% | 73.1% | 91.2% | 79.9% | 80.8% | 94.5% |
| NLCD 2011 | 71.2% | 71.1% | 86.4% | 92.5% | 96.2% | 73.1% | 93.3% | 80.6% | 79.0% | 94.5% |
| NLCD 2016 | 71.7% | 71.9% | 86.4% | 92.0% | 97.1% | 72.6% | 93.3% | 80.9% | 78.9% | 93.8% |
| LCMAP 1990 | 72.1% | 70.6% | 88.4% | 90.1% | 95.9% | 64.6% | 92.7% | 79.3% | 84.1% | 93.3% |
| LCMAP 1995 | 75.5% | 70.3% | 88.7% | 90.1% | 96.1% | 64.2% | 93.6% | 79.5% | 84.5% | 92.9% |
| LCMAP 2000 | 79.4% | 70.0% | 88.2% | 90.4% | 96.7% | 62.7% | 94.1% | 80.2% | 83.7% | 92.5% |
| LCMAP 2005 | 81.2% | 68.9% | 87.7% | 90.5% | 96.1% | 61.7% | 94.2% | 80.3% | 83.1% | 92.5% |
| LCMAP 2010 | 80.7% | 68.5% | 87.1% | 90.6% | 96.5% | 61.5% | 93.7% | 80.3% | 82.6% | 92.3% |
| LCMAP 2015 | 83.1% | 68.4% | 86.8% | 90.1% | 96.8% | 59.7% | 93.9% | 80.2% | 82.1% | 92.1% |
| FROMGLC 2010 | 38.2% | 44.5% | 60.0% | 57.6% | 80.0% | 2.5% | 29.6% | 15.6% | 70.0% | 82.7% |
| FROMGLC 2015 | 91.6% | 70.4% | 68.1% | 72.5% | 90.6% | 30.1% | 57.4% | 69.8% | 83.5% | 91.5% |
| GlobeLand30 2000 | 74.7% | 64.8% | 82.7% | 83.9% | 95.4% | 42.9% | 93.0% | 76.7% | 77.1% | 63.3% |
| GlobeLand30 2010 | 80.6% | 63.6% | 82.3% | 82.7% | 95.7% | 43.1% | 93.7% | 76.8% | 76.6% | 63.0% |
| Esri 2018 | 77.0% | 74.2% | 78.9% | 79.2% | 95.0% | 65.5% | 88.3% | 82.8% | 78.2% | 94.1% |
| WC 2020 | 92.7% | 89.0% | 79.7% | 72.0% | 96.0% | 20.9% | 79.4% | 78.0% | 91.6% | 92.6% |
| WC 2021 | 97.9% | 90.8% | 81.8% | 74.6% | 97.7% | 19.9% | 82.2% | 79.8% | 93.5% | 93.3% |
| DW 2018 | 90.5% | 70.9% | 76.4% | 73.8% | 93.8% | 53.9% | 84.2% | 51.5% | 86.7% | 96.0% |
| Products | F1 Score | ||||||
|---|---|---|---|---|---|---|---|
| Developed | Cropland | Grass/Shrub | Tree Cover | Water | Wetland | Barren | |
| NLCD 1992 | 22.8% | 51.4% | 50.2% | 70.1% | 62.7% | 35.4% | 19.0% |
| NLCD 2001 | 57.5% | 55.9% | 51.8% | 74.4% | 70.6% | 58.3% | 45.9% |
| NLCD 2011 | 58.8% | 55.6% | 52.7% | 72.6% | 68.8% | 58.3% | 46.4% |
| NLCD 2016 | 59.3% | 56.0% | 51.6% | 71.3% | 66.9% | 57.9% | 46.3% |
| LCMAP 1990 | 53.2% | 61.2% | 59.3% | 77.6% | 60.6% | 47.9% | 47.1% |
| LCMAP 1995 | 54.1% | 60.4% | 58.7% | 77.5% | 59.8% | 47.8% | 45.2% |
| LCMAP 2000 | 53.7% | 59.1% | 58.1% | 76.6% | 62.5% | 48.2% | 48.7% |
| LCMAP 2005 | 53.0% | 57.1% | 57.6% | 76.2% | 59.1% | 47.0% | 45.8% |
| LCMAP 2010 | 52.9% | 55.7% | 57.3% | 75.4% | 60.7% | 47.3% | 47.1% |
| LCMAP 2015 | 52.0% | 54.9% | 56.3% | 74.6% | 60.3% | 47.2% | 47.4% |
| FROMGLC 2010 | 1.5% | 26.9% | 19.0% | 60.1% | 37.7% | 3.3% | 14.9% |
| FROMGLC 2015 | 18.1% | 41.9% | 52.7% | 70.5% | 52.4% | 0.5% | 31.7% |
| Globeland30 2000 | 24.2% | 52.0% | 50.2% | 66.7% | 50.0% | 31.9% | 31.3% |
| Globeland30 2010 | 26.4% | 49.1% | 49.4% | 65.0% | 49.1% | 30.7% | 31.1% |
| Esri 2018 | 57.0% | 61.6% | 59.5% | 72.0% | 67.1% | 9.7% | 55.2% |
| WC 2020 | 17.8% | 69.3% | 63.7% | 78.3% | 66.9% | 8.4% | 32.0% |
| WC 2021 | 16.6% | 60.1% | 57.6% | 74.1% | 57.5% | 7.5% | 40.3% |
| DW 2018 | 50.7% | 64.7% | 53.4% | 74.6% | 72.3% | 7.5% | 32.4% |
| Products | F1 Score | ||||||
|---|---|---|---|---|---|---|---|
| Developed | Cropland | Grass/Shrub | Tree Cover | Water | Wetland | Barren | |
| NLCD 1992 | −51.34% | −29.78% | −34.64% | −16.70% | −32.69% | −40.41% | −12.52% |
| NLCD 2001 | −31.95% | −31.34% | −38.13% | −17.58% | −27.88% | −29.80% | −14.73% |
| NLCD 2011 | −32.62% | −32.47% | −37.25% | −18.96% | −29.76% | −29.67% | −15.84% |
| NLCD 2016 | −31.54% | −32.60% | −38.82% | −20.48% | −31.79% | −30.42% | −15.51% |
| LCMAP 1990 | −31.92% | −25.43% | −29.66% | −14.33% | −37.34% | −36.35% | −0.15% |
| LCMAP 1995 | −32.89% | −26.54% | −30.66% | −14.73% | −38.37% | −36.52% | −4.80% |
| LCMAP 2000 | −35.19% | −28.29% | −31.53% | −15.71% | −35.67% | −36.27% | 0.72% |
| LCMAP 2005 | −36.16% | −29.91% | −31.89% | −15.93% | −38.98% | −36.86% | −5.36% |
| LCMAP 2010 | −36.40% | −31.10% | −32.01% | −16.70% | −37.46% | −36.76% | −4.20% |
| LCMAP 2015 | −37.25% | −32.06% | −32.96% | −17.07% | −36.87% | −36.82% | −3.90% |
| FROMGLC 2010 | −7.20% | −11.54% | −7.17% | −4.72% | −48.76% | −3.24% | 8.87% |
| FROMGLC 2015 | −53.37% | −27.12% | −20.77% | −10.86% | −42.73% | −4.16% | 17.41% |
| Globeland30 2000 | −57.98% | −33.25% | −36.08% | −20.82% | −29.13% | −46.60% | −6.31% |
| Globeland30 2010 | −57.40% | −36.14% | −36.85% | −22.19% | −30.07% | −47.24% | −8.55% |
| Esri 2018 | −30.33% | −24.61% | −26.04% | −10.41% | −31.06% | −2.91% | 7.74% |
| WC 2020 | −32.45% | −20.89% | −21.28% | −7.46% | −31.66% | −14.22% | 8.80% |
| WC 2021 | −36.72% | −29.35% | −26.55% | −10.27% | −40.93% | −13.97% | 15.77% |
| DW 2018 | −35.07% | −15.21% | −10.11% | −8.16% | −25.71% | −0.74% | 21.67% |
| Single-Class Maps | F1_score_class | User’s Accuracy | Producer’s Accuracy |
|---|---|---|---|
| GAIA 1990 | 40.0% | 87.4% | 25.9% |
| GAIA 2000 | 44.5% | 89.1% | 29.7% |
| GAIA 2010 | 46.6% | 89.7% | 31.5% |
| GAIA 2015 | 49.2% | 88.6% | 34.0% |
| CDL 2010 | 61.2% | 65.1% | 57.8% |
| CDL 2015 | 62.8% | 65.8% | 60.0% |
| GAIA 1990 | GAIA 2000 | GAIA 2010 | GAIA 2015 | CDL 2010 | CDL 2015 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NC | C | NC | C | NC | C | NC | C | NC | C | NC | C | |
| NC | 23910 | 38 | 23744 | 43 | 23583 | 48 | 23534 | 60 | 19353 | 1329 | 19242 | 1361 |
| C | 754 | 264 | 829 | 350 | 915 | 420 | 905 | 467 | 1808 | 2476 | 1745 | 2618 |
| Products | Average F1 Score of Developed, Cropland, Grass/Shrub, Tree and Water | ||||
| Temperate, No Dry Season | Arid | Temperate, Dry Summer | Cold, Dry/Hot Summer | Cold, Warm/Cold Summer | |
| LCMAP 2015 | 71.7% | 83.6% | 81.2% | 81.2% | 76.3% |
| NLCD 2016 | 73.6% | 82.8% | 79.2% | 81.4% | 79.3% |
| ESRI 2018 | 77.6% | 71.3% | 77.1% | 81.3% | 77.2% |
| WC 2021 | 69.2% | 76.7% | 71.5% | 72.1% | 72.0% |
| DW 2018 | 77.9% | 63.6% | 74.7% | 82.7% | 78.2% |
| Samples | 5213 | 8035 | 860 | 5409 | 3524 |
| Samples/1000 km2 | 2.79 | 2.99 | 2.82 | 3.01 | 2.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Mountrakis, G. Accuracy Assessment of Eleven Medium Resolution Global and Regional Land Cover Land Use Products: A Case Study over the Conterminous United States. Remote Sens. 2023, 15, 3186. https://doi.org/10.3390/rs15123186
Wang Z, Mountrakis G. Accuracy Assessment of Eleven Medium Resolution Global and Regional Land Cover Land Use Products: A Case Study over the Conterminous United States. Remote Sensing. 2023; 15(12):3186. https://doi.org/10.3390/rs15123186
Chicago/Turabian StyleWang, Zhixin, and Giorgos Mountrakis. 2023. "Accuracy Assessment of Eleven Medium Resolution Global and Regional Land Cover Land Use Products: A Case Study over the Conterminous United States" Remote Sensing 15, no. 12: 3186. https://doi.org/10.3390/rs15123186
APA StyleWang, Z., & Mountrakis, G. (2023). Accuracy Assessment of Eleven Medium Resolution Global and Regional Land Cover Land Use Products: A Case Study over the Conterminous United States. Remote Sensing, 15(12), 3186. https://doi.org/10.3390/rs15123186