



Coastal Ship Tracking with Memory-Guided Perceptual Network


Abstract
1. Introduction
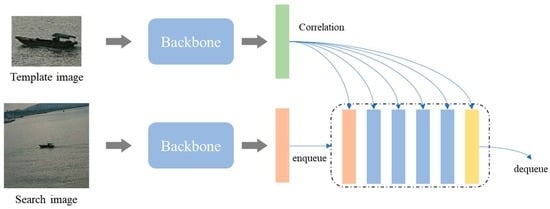
- A dynamic memory mechanism (DMM) is introduced in the search branch to dynamically store the features of past frames and merge them with current frame features as prior information, which can improve the robustness of tracking by incorporating more context and history and accuracy features. DMMs can help mitigate the effects of complex background occlusions and provide a more comprehensive and contextualized representation of objects.
- We introduce a Hierarchical Context-Aware Module (HCAM) in the template branch. It extracts the contextual information of ship features at multiple scales and improves the receptive field through a hierarchical global-and-local dilation convolution, which can improve tracking accuracy and robustness.
- Without bells and whistles, our method outperforms the state-of-the-art methods on a large maritime dataset LMD-TShip [33] and achieves a tracking EAO of up to 0.665 and Robustness of up to 0.067.
2. Related Work
2.1. Visual Object Tracking
2.2. Ship Tracking
3. Methodology
3.1. Dynamic Memory Mechanism
| Algorithm 1: Dynamic Memory Mechanism. |
 |
3.2. Hierarchical Context-Aware Module
3.2.1. Local Information Extraction
3.2.2. Global Information Extraction
3.2.3. Hierarchical Structure
3.3. Head and Loss
3.3.1. Head
3.3.2. Loss
4. Experiments
4.1. Dataset and Evaluation Metrics
4.1.1. Dataset
4.1.2. Evaluation Metrics
4.2. Implementation Details
4.3. Ablation Study
4.4. Comparison with State-of-the-Art Trackers
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martin-Martin, R.; Mihir, P.; Hamid, R.; Abhijeet, S.; Gwak, J.; Eric, F.; Amir, S.; Silvio, S. Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environments. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 45, 6748–6765. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Anjum, S.; Gurari, D. CTMC: Cell tracking with mitosis detection dataset challenge. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Zhao, K.; Hu, J.; Shao, H.; Hu, J. Federated multi-source domain adversarial adaptation framework for machinery fault diagnosis with data privacy. Reliab. Eng. Syst. Saf. 2023, 236, 109246. [Google Scholar] [CrossRef]
- Zhao, K.; Jia, F.; Shao, H. A novel conditional weighting transfer Wasserstein auto-encoder for rolling bearing fault diagnosis with multi-source domains. Knowl.-Based Syst. 2023, 262, 110203. [Google Scholar] [CrossRef]
- Maddalena, L.; Petrosino, A. A self-organizing approach to background subtraction for visual surveillance applications. IEEE Trans. Image Process. 2008, 17, 1168–1177. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, S.; Shi, C.; Wu, H.; Zhao, J.; Fu, J. Robust Ship Tracking via Multi-view Learning and Sparse Representation. J. Navig. 2019, 72, 176–192. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Wu, H.; Huang, Y.; Yang, Y.; Zhang, W.; Xiong, P. Robust Visual Ship Tracking with an Ensemble Framework via Multi-view Learning and Wavelet Filter. Sensors 2020, 20, 932. [Google Scholar] [CrossRef] [PubMed]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012. [Google Scholar]
- Surasak, T.; Takahiro, I.; Cheng, C.H.; Wang, C.E.; Sheng, P.Y. Histogram of oriented gradients for human detection in video. In Proceedings of the International Conference on Business and Industrial Research, Bangkok, Thailand, 17–18 May 2018. [Google Scholar]
- Jin, B.; Vai, M.I. An adaptive ultrasonic backscattered signal processing technique for instantaneous characteristic frequency detection. Bio-Med. Mater. Eng. 2014, 24, 2761–2770. [Google Scholar] [CrossRef] [PubMed]
- Song, F.; Liu, Y.; Shen, D.; Li, L.; Tan, J. Learning Control for Motion Coordination in Wafer Scanners: Toward Gain Adaptation. IEEE Trans. Ind. Electron. 2022, 69, 13428–13438. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1440–1448. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 583–596. [Google Scholar] [CrossRef]
- Zheng, L.; Tang, M.; Chen, Y.; Wang, J.; Lu, H. Learning feature embeddings for discriminant model based tracking. In Proceedings of the European Conference on Computer Vision, Virtual, 23–28 August 2020. [Google Scholar]
- Danelljan, M.; Gool, L.V.; Timofte, R. Probabilistic regression for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Chen, Y.; Tang, Y.; Han, T.; Zhang, Y.; Zou, B.; Feng, H. RAMC: A Rotation Adaptive Tracker with Motion Constraint for Satellite Video Single-Object Tracking. Remote Sens. 2022, 14, 3108. [Google Scholar] [CrossRef]
- Lin, B.; Bai, Y.; Bai, B.; Li, Y. Robust Correlation Tracking for UAV with Feature Integration and Response Map Enhancement. Remote Sens. 2022, 14, 4073. [Google Scholar] [CrossRef]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional Siamese Networks for Object Tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High Performance Visual Tracking with Siamese Region Proposal Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Chen, Z.; Zhong, B.; Li, G.; Zhang, S.; Ji, R. Siamese box adaptive network for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Guo, D.; Shao, Y.; Cui, Y.; Wang, Z.; Zhang, L.; Shen, C. Graph attention tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Guo, D.; Wang, J.; Cui, Y.; Wang, Z.; Chen, S. SiamCAR: Siamese fully convolutional classification and regression for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Xu, Y.; Wang, Z.; Li, Z.; Yuan, Y.; Yu, G. SiamFC++: Towards Robust and Accurate Visual Tracking with Target Estimation Guidelines. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Shan, Y.; Zhou, X.; Liu, S.; Zhang, Y.; Huang, K. SiamFPN: A deep learning method for accurate and real-time maritime ship tracking. IEEE Trans. Circuits Syst. Video Technol. 2020, 31, 315–325. [Google Scholar] [CrossRef]
- Liu, H.; Xu, X.; Chen, X.; Li, C.; Wang, M. Real-Time Ship Tracking under Challenges of Scale Variation and Different Visibility Weather Conditions. J. Mar. Sci. Eng. 2022, 10, 444. [Google Scholar] [CrossRef]
- Shan, Y.; Liu, S.; Zhang, Y.; Jing, M.; Xu, H. LMD-TShip: Vision Based Large-Scale Maritime Ship Tracking Benchmark for Autonomous Navigation Applications. IEEE Access 2021, 9, 74370–74384. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-aware Siamese Networks for Visual Object Tracking. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Fu, C.; Cao, Z.; Li, Y.; Ye, J.; Feng, C. Onboard Real-Time Aerial Tracking with Efficient Siamese Anchor Proposal Network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5606913. [Google Scholar] [CrossRef]
- Yang, K.; He, Z.; Zhou, Z.; Fan, N. SiamAtt: Siamese Attention Network for Visual Tracking. Knowl.-Based Syst. 2020, 203, 106079. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, L.; Bertinetto, L.; Hu, W.; Torr, P.H. Fast Online Object Tracking and Segmentation: A Unifying Approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Zhang, Z.; Peng, H.; Fu, J.; Li, B.; Hu, W. Ocean: Object-aware anchor-free tracking. In Proceedings of the European Conference on Computer Vision, Virtual, 23–28 August 2020. [Google Scholar]
- Teng, F.; Liu, Q. Robust Multi-scale Ship Tracking via Multiple Compressed Features Fusion. Signal Process. Image Commun. 2015, 31, 76–85. [Google Scholar] [CrossRef]
- Zhang, Y.; Luo, J.; Zhang, Y.; Huang, Y.; Cai, X.; Yang, J.; Mao, D.; Li, J.; Tuo, X.; Zhang, Y. Resolution Enhancement for Large-Scale Real Beam Mapping Based on Adaptive Low-Rank Approximation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5116921. [Google Scholar] [CrossRef]
- Zhou, A.; Xie, W.; Pei, J. Background Modeling in the Fourier Domain for Maritime Infrared Target Detection. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 2634–2649. [Google Scholar] [CrossRef]
- Liu, B.; Wang, S.; Xie, Z.; Zhao, J.; Li, M. Ship Recognition and Tracking System for Intelligent Ship Based on Deep Learning Framework. TransNav 2019, 13, 4. [Google Scholar] [CrossRef]
- Wu, J.; Cao, C.; Zhou, Y.; Zeng, X.; Feng, Z.; Wu, Q.; Huang, Z. Multiple Ship Tracking in Remote Sensing Images using Deep Learning. Remote Sens. 2021, 13, 3601. [Google Scholar] [CrossRef]
- Farhadi, A.; Redmon, J. Yolov3: An Incremental Improvement. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate Attention for Efficient Mobile Network Design. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Kristan, M.; Matas, J.; Leonardis, A.; Felsberg, M.; Cehovin, L.; Fernandez, G.; Vojir, T.; Hager, G.; Nebehay, G.; Pflugfelder, R. The Visual Object Tracking VOT2015 Challenge Results. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Čehovin, L.; Kristan, M.; Leonardis, A. Is My New Tracker Really Better Than Yours? In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Steamboat Springs, CO, USA, 24–26 March 2014. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Online Object Tracking: A Benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Goyette, N.; Jodoin, P.M.; Porikli, F.; Konrad, J.; Ishwar, P. Changedetection.net: A New Change Detection Benchmark Dataset. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Pang, Y.; Ling, H. Finding the Best from the Second Bests-inhibiting Subjective Bias in Evaluation of Visual Tracking Algorithms. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar]
- Feng, T.; Qiang, L. Ranking-based Siamese visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DMM | HCAM | Accuracy | Robustness | EAO | FLOPs (G) | Parameters (M) |
|---|---|---|---|---|---|---|
| 0.780 | 0.092 | 0.595 | 59.3 | 53.9 | ||
| ✓ | 0.797 | 0.092 | 0.635 | 59.4 | 53.9 | |
| ✓ | 0.778 | 0.075 | 0.636 | 59.6 | 54.1 | |
| ✓ | ✓ | 0.793 | 0.067 | 0.665 | 59.8 | 54.1 |
| q | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| EAO | 0.636 | 0.631 | 0.658 | 0.665 | 0.639 |
| Method | Accuracy ↑ | Robustness ↓ | EAO ↑ | FPS ↑ |
|---|---|---|---|---|
| SiamRPN | 0.755 | 0.125 | 0.520 | 160 |
| SiamRPN++ | 0.765 | 0.125 | 0.526 | 35 |
| SiamAtt | 0.734 | 0.134 | 0.495 | 40 |
| SiamBAN | 0.780 | 0.092 | 0.595 | 71 |
| SiamCAR | 0.769 | 0.092 | 0.627 | 52 |
| RBO | 0.808 | 0.109 | 0.590 | 70 |
| MGPN (ours) | 0.793 | 0.067 | 0.665 | 68 |
| Method | Cargo | Fishing | Passenger | Speedboat | Unmanned |
|---|---|---|---|---|---|
| SiamRPN | 0.802 | 0.490 | 0.762 | 0.416 | 0.708 |
| SiamRPN++ | 0.792 | 0.484 | 0.739 | 0.458 | 0.671 |
| SiamAtt | 0.780 | 0.441 | 0.751 | 0.399 | 0.657 |
| SiamBAN | 0.803 | 0.594 | 0.824 | 0.459 | 0.702 |
| SiamCAR | 0.775 | 0.559 | 0.764 | 0.633 | 0.683 |
| RBO | 0.800 | 0.593 | 0.822 | 0.443 | 0.728 |
| MGPN (ours) | 0.807 | 0.654 | 0.826 | 0.590 | 0.709 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhu, H.; Zhao, H.; Yang, D. Coastal Ship Tracking with Memory-Guided Perceptual Network. Remote Sens. 2023, 15, 3150. https://doi.org/10.3390/rs15123150
Yang X, Zhu H, Zhao H, Yang D. Coastal Ship Tracking with Memory-Guided Perceptual Network. Remote Sensing. 2023; 15(12):3150. https://doi.org/10.3390/rs15123150
Chicago/Turabian StyleYang, Xi, Haiyang Zhu, Hua Zhao, and Dong Yang. 2023. "Coastal Ship Tracking with Memory-Guided Perceptual Network" Remote Sensing 15, no. 12: 3150. https://doi.org/10.3390/rs15123150
APA StyleYang, X., Zhu, H., Zhao, H., & Yang, D. (2023). Coastal Ship Tracking with Memory-Guided Perceptual Network. Remote Sensing, 15(12), 3150. https://doi.org/10.3390/rs15123150