
Utö Observatory for Analysing Atmospheric Ducting Events over Baltic Coastal and Marine Waters
 ,
,  , , and
, , and 
Abstract

1. Introduction
2. The Utö Observatory
3. Theory and Methods
3.1. Refractivity
3.2. The Empirical Ducting Index
3.3. Mixed Layer Height Estimation
4. Results
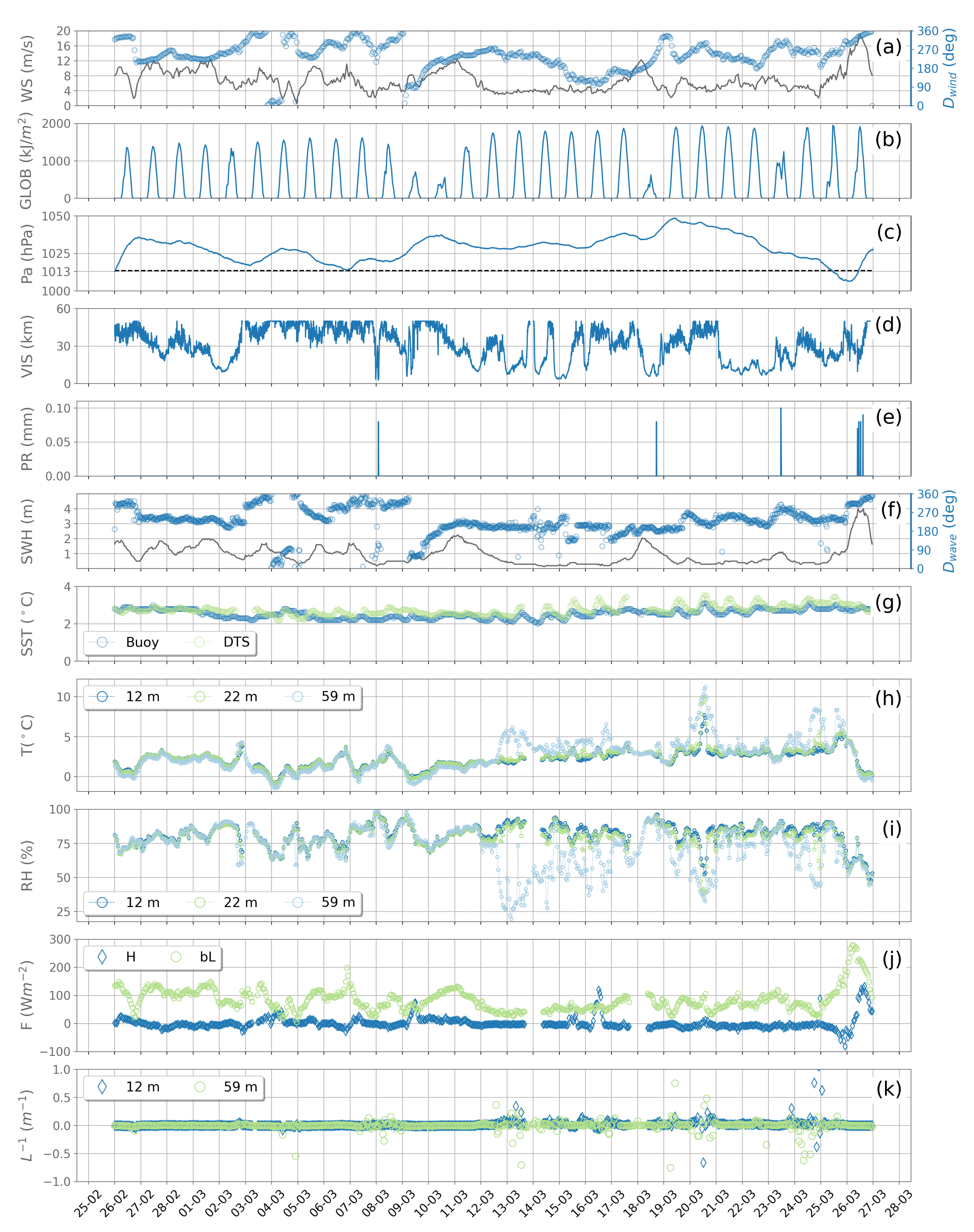
4.1. Weather Conditions
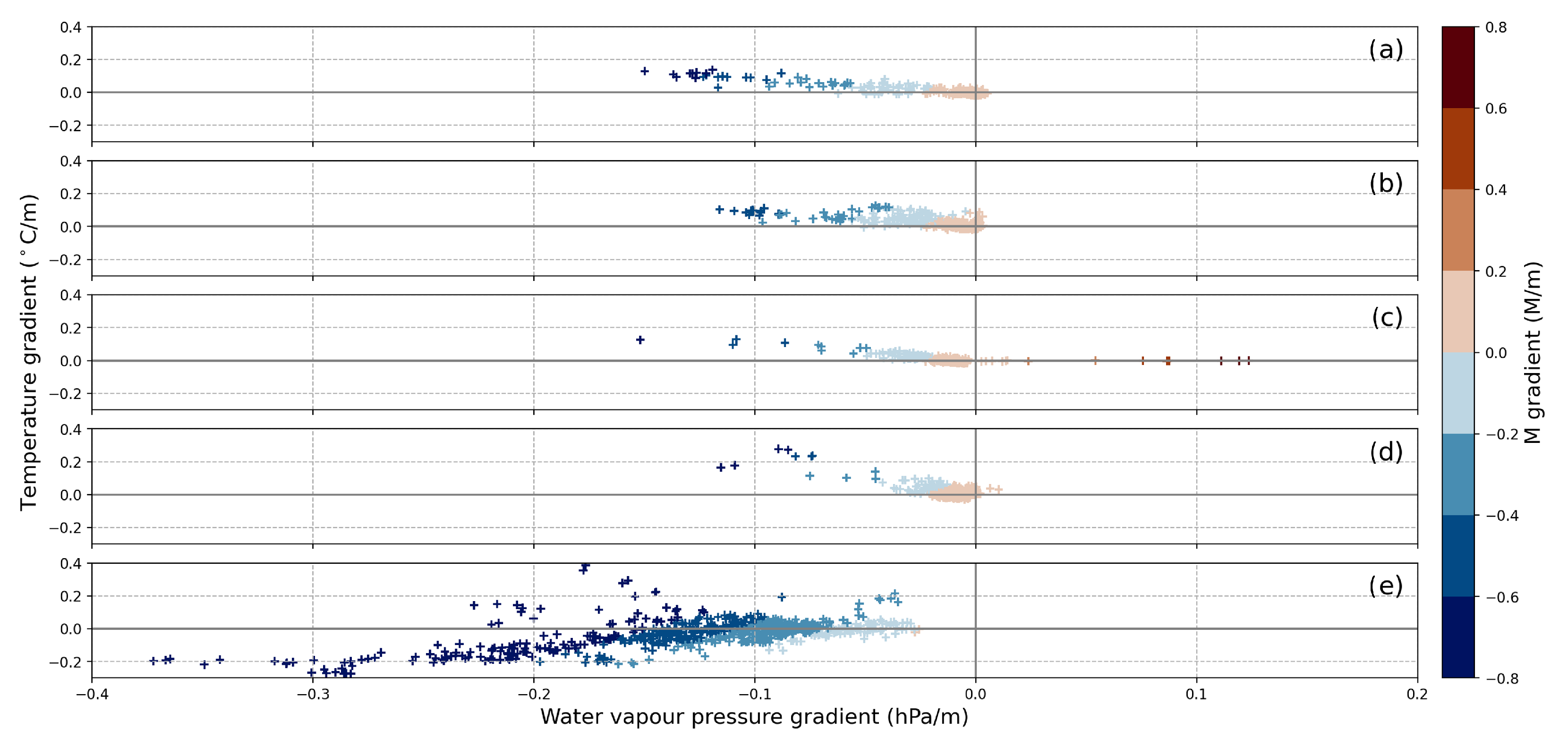
4.2. Analysis of the Ducting Period Based on the Modified Refractivity Gradients
4.3. Beginning of the Ducting Period
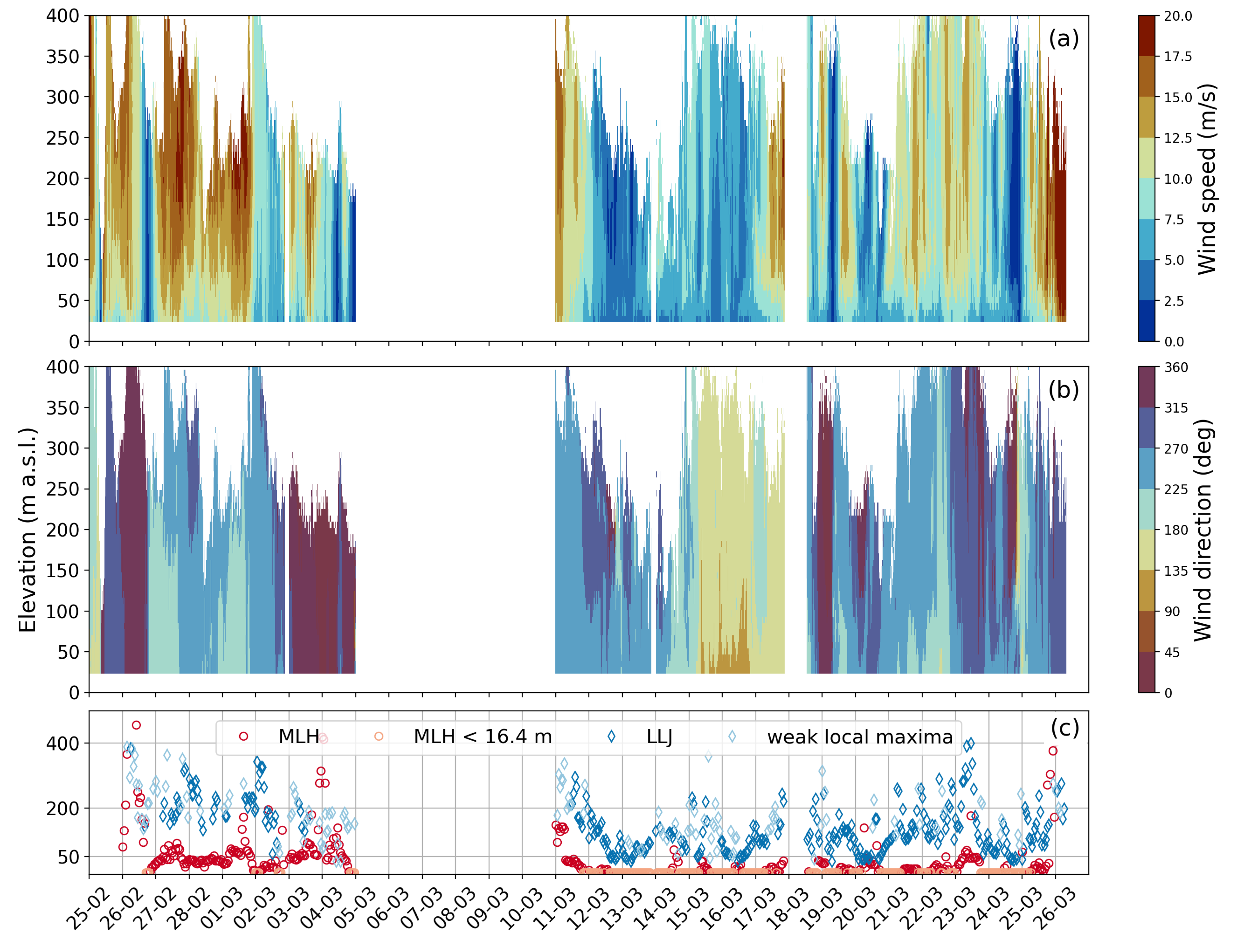
4.4. Analysis of the Ducting Period Based on the Coastal Radar
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ASL | Above sea level |
| AGL | Above ground level |
| LLJ | Low-level jet |
| MLH | Mixed layer height |
| SST | Sea surface temperature |
| TKE | Turbulent kinetic energy |
Appendix A. Auxiliary Observations at Utö

| Observations | Variable | Beginning of Observations | Location |
|---|---|---|---|
| Meteorology | T, p, WS, WD, RH | 1881 | 5 |
| Precipitation, cloudiness | 1881 | 5 | |
| Global, diffuse and UV radiation | 1998 | 3 | |
| Visibility | 2002 | 5 | |
| Cloud cover and height | 2006 | 5 | |
| 3D wind profile | 2012 | 5 | |
| Weather camera | 2014 | 4 | |
| Aerosols and trace gases | Aerosol mass (PM) | 1980 | 5 |
| SO | 1980 | 5 | |
| Aerosol chemical composition (PM) | 1980 | 5 | |
| NO, O | 1986 | 5 | |
| Aerosol mass (PM) | 2003 | 5 | |
| Aerosol size distribution | 2004 | 5 | |
| Aerosol absorption | 2007 | 5 | |
| Aerosol scattering | 2010 | 5 | |
| Aerosol chemical composition (PM) | 2011 | 5 | |
| Phosphorus deposition | 2014 | 5 | |
| Radon | 2015 | 5 | |
| Atmospheric greenhouse gases | CO, CH and CO | 2012 | 3 |
| CO-flux | 2012 | 2 | |
| Marine observations | Sea ice | 1897 | near 1 |
| Temperature and salinity profiles (0…–90 m) | 1900 | near 1 | |
| Nutrient and chlorophyll profiles (0…–70 m) | 2001 | near 1 | |
| Temperature, salinity, O, turbidity, | 2014 | 1 | |
| chlorophyll (5 m) | 1 | ||
| Currents (0…–23 m) and surface waves | 2014 | near 1 | |
| Automatic Identification System (AIS) | 2015 | 1, 3 | |
| Bottle sampler | 2015 | 1 | |
| Spectrometric sea water observations | 2016 | 1 | |
| pCO | 2016 | 1 | |
| pH, DIC | 2016 | 1 | |
| Cabled bottom profiler (−5…–70 m) | 2018 | near dx | |
| Temperature, salinity, O, turbidity, | |||
| Fluorescence | |||
| Currents (0…–75 m) and surface waves | 2018 | near dx |
References
- Linquist, T. Wave Propagation Models in the Troposphere for Long-Range UHF/SHF Radio Connections. Master’s Thesis, Karlstad University, Karlstad, Sweden, 2021. [Google Scholar]
- Anderson, K. Radar measurements at 16.5 GHz in the oceanic evaporation duct. IEEE Trans. Antennas Propag. 1989, 37, 100–106. [Google Scholar] [CrossRef]
- Reilly, J.; Dockery, G. Influence of evaporation ducts on radar sea return. IEEE Proc. F (Radar Signal Process.) 1990, 137, 80–88. [Google Scholar] [CrossRef]
- Anderson, K. Radar detection of low-altitude targets in a maritime environment. IEEE Trans. Antennas Propag. 1995, 43, 609–613. [Google Scholar] [CrossRef]
- Babin, S.M.; Young, G.S. A new model of the oceanic evaporation duct. J. Appl. Meteorol. 1997, 36, 193. [Google Scholar] [CrossRef]
- Babin, S.M.; Dockery, G.D. LKB-Based Evaporation Duct Model Comparison with Buoy Data. J. Appl. Meteorol. 2002, 41, 434–446. [Google Scholar] [CrossRef]
- Yang, C.; Wang, J.; Shi, Y. A Multi-Dimensional Deep-Learning-Based Evaporation Duct Height Prediction Model Derived from MAGIC Data. Remote Sens. 2022, 14, 5484. [Google Scholar] [CrossRef]
- Dougherty, H.T.; Dutton, E.J. The Role of Elevated Ducting for Radio Service and Interference Fields; Technical Report TR-81-69; National Telecommunications and Information Administration (NTIA): Washington, DC, USA, 1981. [Google Scholar]
- Huang, L.F.; Liu, C.G.; Wang, H.G.; Zhu, Q.L.; Zhang, L.J.; Han, J.; Zhang, Y.S.; Wang, Q.N. Experimental Analysis of Atmospheric Ducts and Navigation Radar Over-the-Horizon Detection. Remote Sens. 2022, 14, 2588. [Google Scholar] [CrossRef]
- Wang, Q.; Alappattu, D.P.; Billingsley, S.; Blomquist, B.; Burkholder, R.J.; Christman, A.J.; Creegan, E.D.; de Paolo, T.; Eleuterio, D.P.; Fernando, H.J.S.; et al. CASPER: Coupled Air–Sea Processes and Electromagnetic Ducting Research. Bull. Am. Meteorol. Soc. 2018, 99, 1449–1471. [Google Scholar] [CrossRef]
- Haus, B.K.; Ortiz-Suslow, D.G.; Doyle, J.D.; Flagg, D.D.; Graber, H.C.; MacMahan, J.; Shen, L.; Wang, Q.; Willams, N.J.; Yardim, C. CLASI: Coordinating Innovative Observations and Modeling to Improve Coastal Environmental Prediction Systems. Bull. Am. Meteorol. Soc. 2022, 103, E889–E898. [Google Scholar] [CrossRef]
- Wang, S.; Yang, K.; Shi, Y.; Yang, F.; Zhang, H.; Ma, Y. Prediction of Over-the-Horizon Electromagnetic Wave Propagation in Evaporation Ducts Based on the Gated Recurrent Unit Network Model. IEEE Trans. Antennas Propag. 2023, 71, 3485–3496. [Google Scholar] [CrossRef]
- Wagner, N.K. An analysis of radiosonde effects on the measured frequency of occurrence of ducting layers. J. Geophys. Res. (1896–1977) 1960, 65, 2077–2085. [Google Scholar] [CrossRef]
- Ao, C.O. Effect of ducting on radio occultation measurements: An assessment based on high-resolution radiosonde soundings. Radio Sci. 2007, 42. [Google Scholar] [CrossRef]
- Bech, J.; Codina, B.; Lorente, J.; Bebbington, D. Monthly and Daily Variations of Radar Anomalous Propagation Conditions: How “Normal” Is Normal Propagation? Copernicus GmbH: Delft, The Netherlands, 2002; pp. 35–39. [Google Scholar]
- Bech, J.; Codina, B.; Lorente, J. Forecasting weather radar propagation conditions. Meteorol. Atmos. Phys. 2007, 96, 229–243. [Google Scholar] [CrossRef]
- Grabner, M.; Kvicera, V. Refractive Index Measurement at TV Tower Prague. Radioengineering 2003, 12, 5–7. [Google Scholar]
- Falodun, S.; Ajewole, M. Radio refractive index in the lowest 100-m layer of the troposphere in Akure, South Western Nigeria. J. Atmos. Sol.-Terr. Phys. 2006, 68, 236–243. [Google Scholar] [CrossRef]
- Adediji, A.; Ajewole, M.; Falodun, S. Distribution of radio refractivity gradient and effective earth radius factor (k-factor) over Akure, South Western Nigeria. J. Atmos. Sol.-Terr. Phys. 2011, 73, 2300–2304. [Google Scholar] [CrossRef]
- Miettunen, E.; Tuomi, L.; Myrberg, K. Water exchange between the inner and outer archipelago areas of the Finnish Archipelago Sea in the Baltic Sea. Ocean. Dyn. 2020, 70, 1421–1437. [Google Scholar] [CrossRef]
- Laakso, L.; Mikkonen, S.; Drebs, A.; Karjalainen, A.; Pirinen, P.; Alenius, P. 100 years of atmospheric and marine observations at the Finnish Utö Island in the Baltic Sea. Ocean Sci. 2018, 14, 617–632. [Google Scholar] [CrossRef]
- Karvonen, J.; Simila, M.; Lehtiranta, J. SAR-based estimation of the baltic sea ice motion. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 2605–2608. [Google Scholar] [CrossRef]
- SITAC of the Copernicus Marine Service. Quality Information Document; Copernicus Marine Service; European Union: Brussels, Belgium, 2022. [Google Scholar] [CrossRef]
- Lensu, M.; Heiler, I.; Karvonen, J. Range compensation in pack ice imagery retrieved by coastal radars. In Proceedings of the 2014 IEEE/OES Baltic International Symposium (BALTIC), Tallinn, Estonia, 27–29 May 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Pearson, G.; Davies, F.; Collier, C. An Analysis of the Performance of the UFAM Pulsed Doppler Lidar for Observing the Boundary Layer. J. Atmos. Ocean. Technol. 2009, 26, 240–250. [Google Scholar] [CrossRef]
- Hirsikko, A.; O’Connor, E.J.; Komppula, M.; Korhonen, K.; Pfüller, A.; Giannakaki, E.; Wood, C.R.; Bauer-Pfundstein, M.; Poikonen, A.; Karppinen, T.; et al. Observing wind, aerosol particles, cloud and precipitation: Finland’s new ground-based remote-sensing network. Atmos. Meas. Tech. 2014, 7, 1351–1375. [Google Scholar] [CrossRef]
- Vakkari, V.; Manninen, A.J.; O’Connor, E.J.; Schween, J.H.; van Zyl, P.G.; Marinou, E. A novel post-processing algorithm for Halo Doppler lidars. Atmos. Meas. Tech. 2019, 12, 839–852. [Google Scholar] [CrossRef]
- Browning, K.A.; Wexler, R. The Determination of Kinematic Properties of a Wind Field Using Doppler Radar. J. Appl. Meteorol. Climatol. 1968, 7, 105–113. [Google Scholar] [CrossRef]
- Turton, J.; Bennetts, D.; Farmer, S. An introduction to radio ducting. Meteorol. Mag. 1988, 117, 245–254. [Google Scholar]
- ITU. The Radio Refractive Index: Its Formula and Refractivity Data, Recommendation ITU-R P.453-6; Technical Report; International Telecommunication Union: Geneva, Switzerland, 2019. [Google Scholar]
- Grabner, M.; Kvicera, V. Atmospheric Refraction and Propagation in Lower Troposphere. In Electromagnetic Waves; Zhurbenko, V., Ed.; IntechOpen: Rijeka, Croatia, 2011; Chapter 7. [Google Scholar] [CrossRef]
- Patterson, W.L. Chapter 26: The Propagation Factor Fp in the radar equation. In Radar Handbook, 3rd ed.; Skolnik, M.I., Ed.; McGraw-Hill: New York, NY, USA, 2008; pp. 1290–1315. [Google Scholar]
- Palmer, A.J.; Baker, D.C. A Novel Simple Semi-Empirical Model for the Effective Earth Radius Factor. IEEE Trans. Broadcast. 2006, 52, 557–565. [Google Scholar] [CrossRef]
- Copernicus Land Monitoring Service. EU-DEM. Copernicus Land Monitoring Service: European Union. 2014. Available online: https://land.copernicus.eu/imagery-in-situ/eu-dem. (accessed on 6 June 2023).
- Vakkari, V.; O’Connor, E.J.; Nisantzi, A.; Mamouri, R.E.; Hadjimitsis, D.G. Low-level mixing height detection in coastal locations with a scanning Doppler lidar. Atmos. Meas. Tech. 2015, 8, 1875–1885. [Google Scholar] [CrossRef]
- O’Connor, E.J.; Illingworth, A.J.; Brooks, I.M.; Westbrook, C.D.; Hogan, R.J.; Davies, F.; Brooks, B.J. A Method for Estimating the Turbulent Kinetic Energy Dissipation Rate from a Vertically Pointing Doppler Lidar, and Independent Evaluation from Balloon-Borne In Situ Measurements. J. Atmos. Ocean. Technol. 2010, 27, 1652–1664. [Google Scholar] [CrossRef]
- FMI. Lämpötila-ja Sadekarttoja Vuodesta 1961; FMI: Helsinki, Finland, 2023. [Google Scholar]
- Honkanen, M.; Tuovinen, J.P.; Laurila, T.; Mäkelä, T.; Hatakka, J.; Kielosto, S.; Laakso, L. Measuring turbulent CO2 fluxes with a closed-path gas analyzer in a marine environment. Atmos. Meas. Tech. 2018, 11, 5335–5350. [Google Scholar] [CrossRef]
- FMI. Jäätalvi 2021–2022 Oli Pitkä ja Leuto; FMI: Helsinki, Finland, 2022. [Google Scholar]
- Tuononen, M.; O’Connor, E.J.; Sinclair, V.A.; Vakkari, V. Low-Level Jets over Utö, Finland, Based on Doppler Lidar Observations. J. Appl. Meteor. Climatol. 2017, 56, 2577–2594. [Google Scholar] [CrossRef]
- Hallgren, C.; Arnqvist, J.; Ivanell, S.; Körnich, H.; Vakkari, V.; Sahlée, E. Looking for an Offshore Low-Level Jet Champion among Recent Reanalyses: A Tight Race over the Baltic Sea. Energies 2020, 13, 3670. [Google Scholar] [CrossRef]
- Liang, Z.; Ding, J.; Fei, J.; Cheng, X.; Huang, X. Maintenance and Sudden Change of a Strong Elevated Ducting Event Associated with High Pressure and Marine Low-Level Jet. J. Meteorol. Res. 2020, 34, 1287–1298. [Google Scholar] [CrossRef]
- Brooks, I.M. Air-sea interaction and spatial variability of the surface evaporation duct in a coastal environment. Geophys. Res. Lett. 2001, 28, 2009–2012. [Google Scholar] [CrossRef]
- Jiang, Q.; Wang, Q.; Gaberšek, S. Mesoscale Variability of Surface Ducts During Santa Ana Wind Episodes. J. Geophys. Res. Atmos. 2022, 127, e2022JD036698. [Google Scholar] [CrossRef]
- Crameri, F. Scientific Colour Maps; Zenodo: Meyrin, Switzerland, 2021. [Google Scholar] [CrossRef]
- Crameri, F.; Shephard, G.; Heron, P. The misuse of colour in science communication. Nat. Commun. 2020, 11, 5444. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










| Parameter | Parameter Value |
|---|---|
| Frequency | X-band (9170–9490 MHz) |
| Peak power | 25 kW |
| Antenna height | 34 m agl |
| Beamwidth (azimuth) | 0.38 deg |
| Beamwidth (elevation) | 20 deg |
| Polarisation mode | Horizontal |
| Instrument | Variable | Height (m) asl | Manufacturer and Model | Location |
|---|---|---|---|---|
| X-band radar | radar backscattering power | 48 | Navielektro Ky | 4 |
| C-band weather radar | radar backscattering power | 61 | Vaisala WRM200 | ax |
| Doppler Lidar | Wind profile | 16…12,000 | Halo Photonics Stream Line Doppler lidar | 5 |
| Acoustic anemometer | Wind, 2D | 10, 32 | Vaisala WMT700 | 2, 5 |
| Acoustic anemometer | Wind, 3D | 12, 64 | METEK uSonic-3 Scientific | 1, 3 |
| T-RH sensor | Air T and RH | 4, 7, 12, 22, 32 | Rotronik HC2A-S3 and Vaisala HMP155EC | 2 |
| T-RH sensor | Air T and RH | 59 | Vaisala HMP155EC | 3 |
| ADCP | Wave spectra and sea water T | 0, −23 | Teledyne Sentinel workhorse 300 | 6 |
| Buoy | Wave spectra, SST | 0 | Obscape wave measurement buoy | dx |
| Buoy | Wave spectra, SST | 0 | Datawell DWR4 Waverider | cx |
| AIS-receiver | AIS signal | 7, 32, 55 | Kongsberg RX610 | 2, 3 |
| Distributed Temperature Sensing | Sea water and air T | −5…32 | Silixa Ultima DTS | 1, 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rautiainen, L.; Tyynelä, J.; Lensu, M.; Siiriä, S.; Vakkari, V.; O’Connor, E.; Hämäläinen, K.; Lonka, H.; Stenbäck, K.; Koistinen, J.; et al. Utö Observatory for Analysing Atmospheric Ducting Events over Baltic Coastal and Marine Waters. Remote Sens. 2023, 15, 2989. https://doi.org/10.3390/rs15122989
Rautiainen L, Tyynelä J, Lensu M, Siiriä S, Vakkari V, O’Connor E, Hämäläinen K, Lonka H, Stenbäck K, Koistinen J, et al. Utö Observatory for Analysing Atmospheric Ducting Events over Baltic Coastal and Marine Waters. Remote Sensing. 2023; 15(12):2989. https://doi.org/10.3390/rs15122989
Chicago/Turabian StyleRautiainen, Laura, Jani Tyynelä, Mikko Lensu, Simo Siiriä, Ville Vakkari, Ewan O’Connor, Karoliina Hämäläinen, Harry Lonka, Ken Stenbäck, Jarmo Koistinen, and et al. 2023. "Utö Observatory for Analysing Atmospheric Ducting Events over Baltic Coastal and Marine Waters" Remote Sensing 15, no. 12: 2989. https://doi.org/10.3390/rs15122989
APA StyleRautiainen, L., Tyynelä, J., Lensu, M., Siiriä, S., Vakkari, V., O’Connor, E., Hämäläinen, K., Lonka, H., Stenbäck, K., Koistinen, J., & Laakso, L. (2023). Utö Observatory for Analysing Atmospheric Ducting Events over Baltic Coastal and Marine Waters. Remote Sensing, 15(12), 2989. https://doi.org/10.3390/rs15122989