
Assessing Transferability of Remote Sensing Pasture Estimates Using Multiple Machine Learning Algorithms and Evaluation Structures


Abstract

1. Introduction
2. Materials and Methods
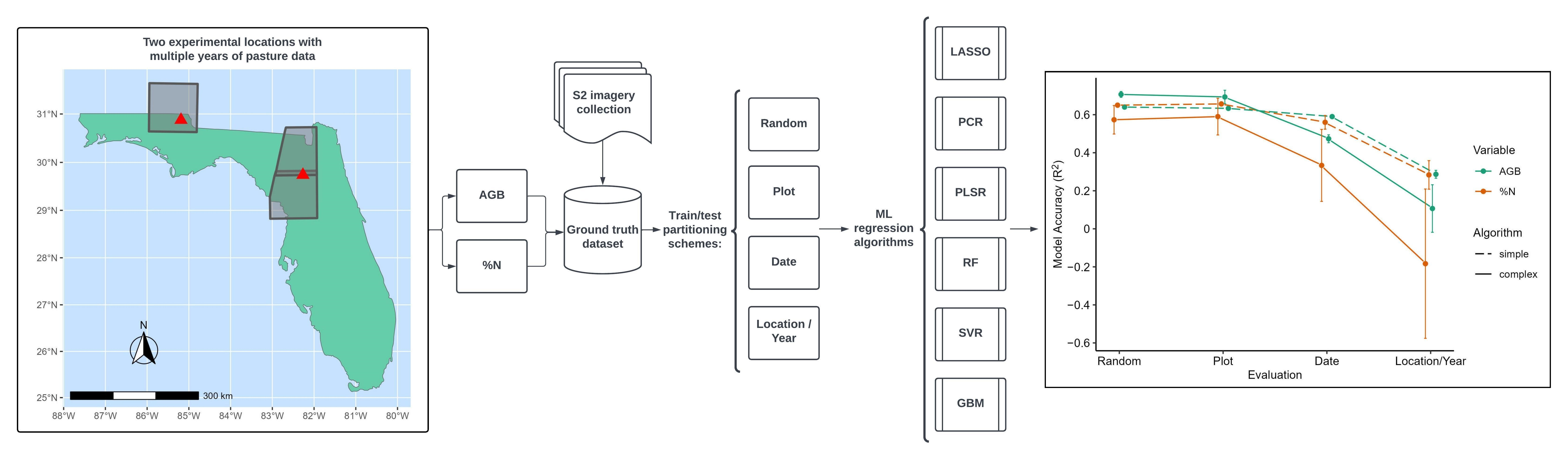
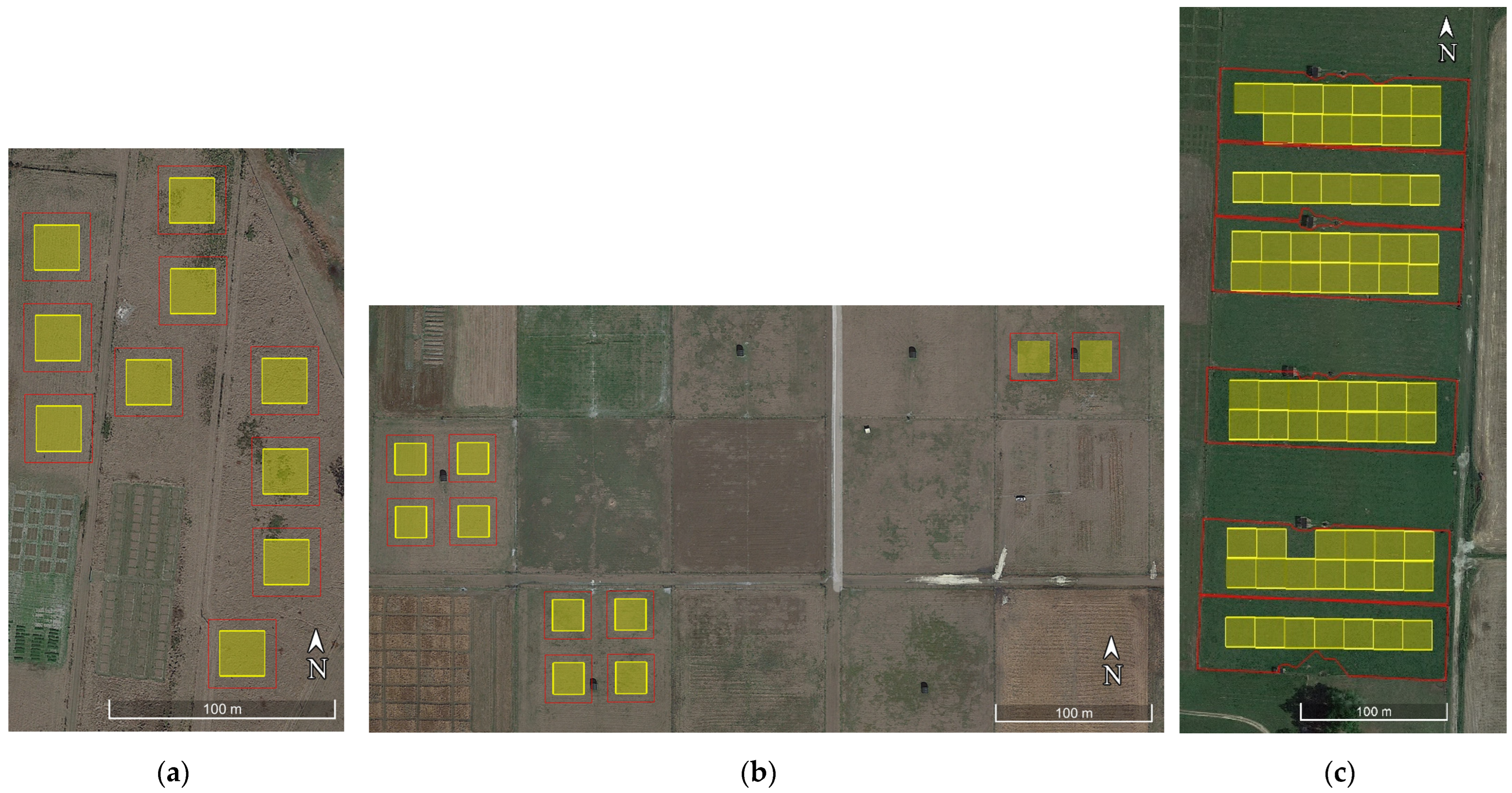
2.1. Experimental Sites and In Situ Measurements
2.2. Sentinel-2 Imagery Processing
2.3. Evaluation Structures
2.4. ML Algorithms and Hyperparameters
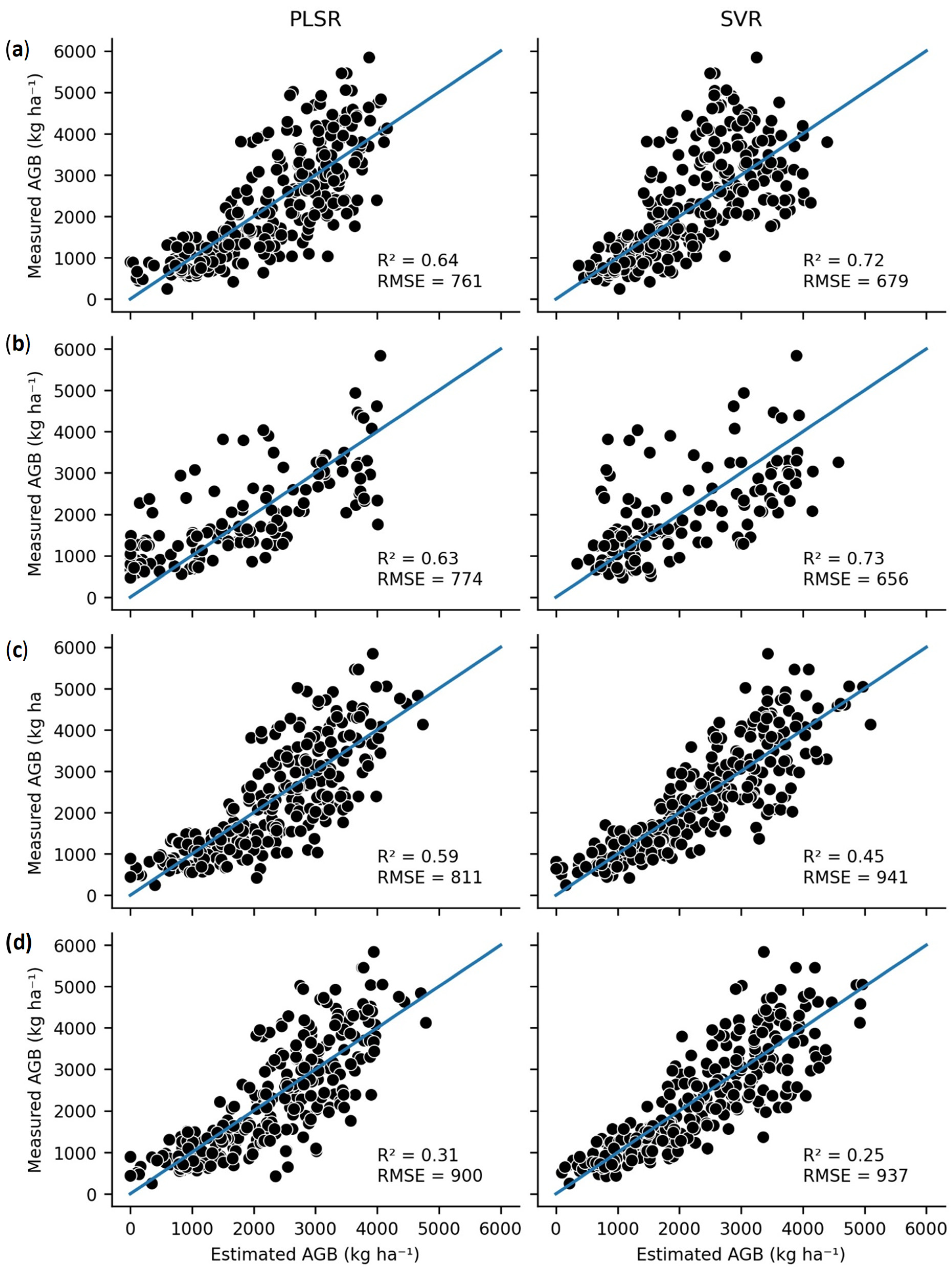
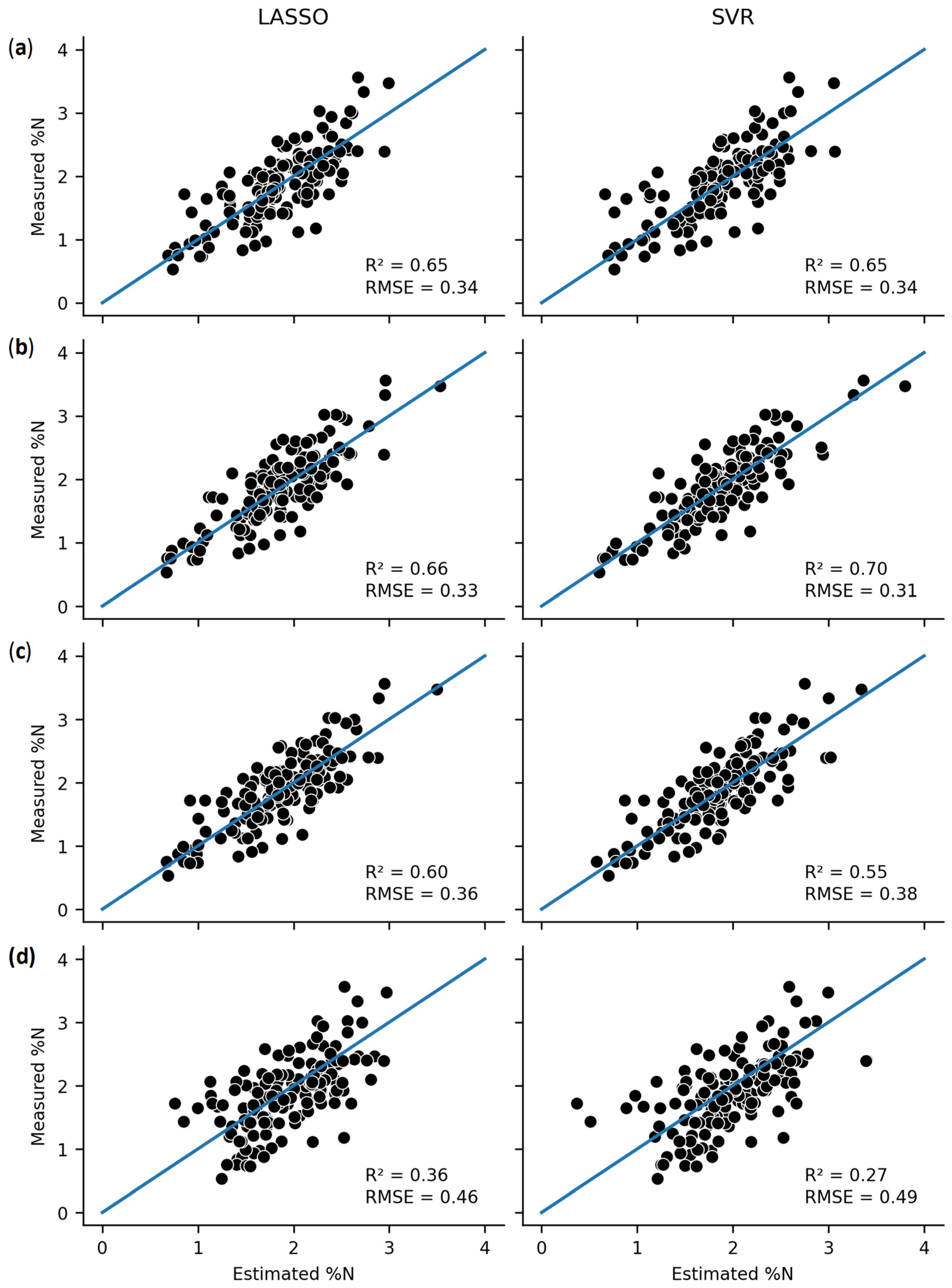
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Conant, R.T. Challenges and Opportunities for Carbon Sequestration in Grassland Systems; Integrated Crop Management; FAO: Rome, Italy, 2010; Volume 9. [Google Scholar]
- Schellberg, J.; Hill, M.J.; Gerhards, R.; Rothmund, M.; Braun, M. Precision agriculture on grassland: Applications, perspectives and constraints. Eur. J. Agron. 2008, 29, 59–71. [Google Scholar] [CrossRef]
- Reinermann, S.; Asam, S.; Kuenzer, C. Remote sensing of grassland production and management—A review. Remote Sens. 2020, 12, 1949. [Google Scholar] [CrossRef]
- Ali, I.; Cawkwell, F.; Dwyer, E.; Barrett, B.; Green, S. Satellite remote sensing of grasslands: From observation to management. J. Plant Ecol. 2016, 9, 649–671. [Google Scholar] [CrossRef]
- Sollenberger, L.E.; Aiken, G.E.; Wallau, M.O. Managing Grazing in Forage–Livestock Systems. In Management Strategies for Sustainable Cattle Production in Southern Pastures; Academic Press: Cambridge, MA, USA, 2020; pp. 77–100. [Google Scholar]
- Hawkins, D.M. The problem of overfitting. J. Chem. Inf. Comput. Sci. 2004, 44, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Anderson, G.L.; Hanson, J.D.; Haas, R.H. Evaluating Landsat Thematic Mapper derived vegetation indices for estimating above-ground biomass on semiarid rangelands. Remote Sens. Environ. 1993, 45, 165–175. [Google Scholar] [CrossRef]
- Cisneros, A.; Fiorio, P.; Menezes, P.; Pasqualotto, N.; Van Wittenberghe, S.; Bayma, G.; Furlan Nogueira, S. Mapping productivity and essential biophysical parameters of cultivated tropical grasslands from sentinel-2 imagery. Agronomy 2020, 10, 711. [Google Scholar] [CrossRef]
- Liu, H.Q.; Huete, A. A feedback based modification of the NDVI to minimize canopy background and atmospheric noise. IEEE Trans. Geosci. Remote Sens. 1995, 33, 457–465. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Garroutte, E.L.; Hansen, A.J.; Lawrence, R.L. Using NDVI and EVI to map spatiotemporal variation in the biomass and quality of forage for migratory elk in the Greater Yellowstone Ecosystem. Remote Sens. 2016, 8, 404. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Rouget, M. Examining the potential of Sentinel-2 MSI spectral resolution in quantifying above ground biomass across different fertilizer treatments. ISPRS J. Photogramm. Remote Sens. 2015, 110, 55–65. [Google Scholar] [CrossRef]
- Mutanga, O.; Skidmore, A.K. Integrating imaging spectroscopy and neural networks to map grass quality in the Kruger National Park, South Africa. Remote Sens. Environ. 2004, 90, 104–115. [Google Scholar] [CrossRef]
- Ramoelo, A.; Cho, M.A.; Mathieu, R.; Madonsela, S.; Van De Kerchove, R.; Kaszta, Z.; Wolff, E. Monitoring grass nutrients and biomass as indicators of rangeland quality and quantity using random forest modelling and WorldView-2 data. Int. J. Appl. Earth Obs. Geoinf. 2015, 43, 43–54. [Google Scholar] [CrossRef]
- Ramoelo, A.; Cho, M.A. Explaining leaf nitrogen distribution in a semi-arid environment predicted on Sentinel-2 imagery using a field spectroscopy derived model. Remote Sens. 2018, 10, 269. [Google Scholar] [CrossRef]
- Roberts, D.R.; Bahn, V.; Ciuti, S.; Boyce, M.S.; Elith, J.; Guillera-Arroita, G.; Hauenstein, S.; Lahoz-Monfort, J.J.; Schröder, B.; Thuiller, W.; et al. Cross-validation strategies for data with temporal, spatial, hierarchical, or phylogenetic structure. Ecography 2017, 40, 913–929. [Google Scholar] [CrossRef]
- Tong, X.Y.; Xia, G.S.; Lu, Q.; Shen, H.; Li, S.; You, S.; Zhang, L. Land-cover classification with high-resolution remote sensing images using transferable deep models. Remote Sens. Environ. 2020, 237, 111322. [Google Scholar] [CrossRef]
- Qin, R.; Liu, T. A review of landcover classification with very-high resolution remotely sensed optical images—Analysis unit, model scalability and transferability. Remote Sens. 2022, 14, 646. [Google Scholar] [CrossRef]
- Foody, G.M.; Boyd, D.S.; Cutler, M.E. Predictive relations of tropical forest biomass from Landsat TM data and their transferability between regions. Remote Sens. Environ. 2003, 85, 463–474. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Gao, S.; Hu, T.; Liu, J.; Guo, Q. The transferability of Random Forest in canopy height estimation from multi-source remote sensing data. Remote Sens. 2018, 10, 1183. [Google Scholar] [CrossRef]
- Lyons, M.B.; Keith, D.A.; Phinn, S.R.; Mason, T.J.; Elith, J. A comparison of resampling methods for remote sensing classification and accuracy assessment. Remote Sens. Environ. 2018, 208, 145–153. [Google Scholar] [CrossRef]
- Wenger, S.J.; Olden, J.D. Assessing transferability of ecological models: An underappreciated aspect of statistical validation. Methods Ecol. Evol. 2012, 3, 260–267. [Google Scholar] [CrossRef]
- Yates, K.L.; Bouchet, P.J.; Caley, M.J.; Mengersen, K.; Randin, C.F.; Parnell, S.; Fielding, A.H.; Bamford, A.J.; Ban, S.; Barbosa, A.M.; et al. Outstanding challenges in the transferability of ecological models. Trends Ecol. Evol. 2018, 33, 790–802. [Google Scholar] [CrossRef] [PubMed]
- Heikkinen, R.K.; Marmion, M.; Luoto, M. Does the interpolation accuracy of species distribution models come at the expense of transferability? Ecography 2012, 35, 276–288. [Google Scholar] [CrossRef]
- Ying, X. An Overview of Overfitting and Its Solutions. J. Phys. Conf. Ser. 2019, 1168, 022022. [Google Scholar] [CrossRef]
- Paris, G.; Robilliard, D.; Fonlupt, C. Exploring overfitting in genetic programming. In International Conference on Artificial Evolution (Evolution Artificielle); Springer: Berlin/Heidelberg, Germany, 2003; pp. 267–277. [Google Scholar]
- Jaramillo, D.M.; Dubeux, J.C.; Sollenberger, L.E.; Vendramini, J.M.; Mackowiak, C.; DiLorenzo, N.; Garcia, L.; Queiroz, L.M.D.; Santos, E.R.; Homem, B.G.; et al. Water footprint, herbage, and livestock responses for nitrogen-fertilized grass and grass–legume grazing systems. Crop Sci. 2021, 61, 3844–3858. [Google Scholar] [CrossRef]
- Qin, Q.; Xu, D.; Hou, L.; Shen, B.; Xin, X. Comparing vegetation indices from Sentinel-2 and Landsat 8 under different vegetation gradients based on a controlled grazing experiment. Ecol. Indic. 2021, 133, 108363. [Google Scholar] [CrossRef]
- Gower, J.F.R. Observations of in situ fluorescence of chlorophyll-a in Saanich Inlet. Bound. -Layer Meteorol. 1980, 18, 235–245. [Google Scholar] [CrossRef]
- Dall’Olmo, G.; Gitelson, A.A.; Rundquist, D.C. Towards a unified approach for remote estimation of chlorophyll-a in both terrestrial vegetation and turbid productive waters. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Huete, A.R.; Liu, H.; van Leeuwen, W.J. The use of vegetation indices in forested regions: Issues of Linearity and Saturation. In Proceedings of the IGARSS’97—1997 IEEE International Geoscience and Remote Sensing Symposium Proceedings. Remote Sensing—A Scientific Vision for Sustainable Development; New York, NY, USA, 3–8 August 1997, Volume 4, pp. 1966–1968.
- Delegido, J.; Alonso, L.; Gonzalez, G.; Moreno, J. Estimating chlorophyll content of crops from hyperspectral data using a normalized area over reflectance curve (NAOC). Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 165–174. [Google Scholar] [CrossRef]
- Van Deventer, A.P.; Ward, A.D.; Gowda, P.H.; Lyon, J.G. Using thematic mapper data to identify contrasting soil plains and tillage practices. Photogramm. Eng. Remote Sens. 1997, 63, 87–93. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Stone, M. Cross-validatory choice and assessment of statistical predictions. J. R. Stat. Soc. Ser. B Methodol. 1974, 36, 111–133. [Google Scholar] [CrossRef]
- Morais, T.G.; Teixeira, R.F.; Figueiredo, M.; Domingos, T. The use of machine learning methods to estimate aboveground biomass of grasslands: A review. Ecol. Indic. 2021, 130, 108081. [Google Scholar] [CrossRef]
- Eastwood, C.; Ayre, M.; Nettle, R.; Rue, B.D. Making sense in the cloud: Farm advisory services in a smart farming future. NJAS-Wagening J. Life Sci. 2019, 90, 100298. [Google Scholar] [CrossRef]
- Sarle, W.S. Stopped training and other remedies for overfitting. In Proceedings of the 27th Symposium on the Interface of Computing Science and Statistics, Fairfax, VA, USA, 21–24 June 1995; pp. 352–360. [Google Scholar]
- Cracknell, M.J.; Reading, A.M. Geological mapping using remote sensing data: A comparison of five machine learning algorithms, their response to variations in the spatial distribution of training data and the use of explicit spatial information. Comput. Geosci. 2014, 63, 22–33. [Google Scholar] [CrossRef]
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP spaceborne imaging spectroscopy mission for earth observation. Remote Sens. 2015, 7, 8830–8857. [Google Scholar] [CrossRef]
- Colwell, J.E. Vegetation canopy reflectance. Remote Sens. Environ. 1974, 3, 175–183. [Google Scholar] [CrossRef]
- Wachendorf, M.; Fricke, T.; Möckel, T. Remote sensing as a tool to assess botanical composition, structure, quantity and quality of temperate grasslands. Grass Forage Sci. 2018, 73, 1–14. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Index Name | Formula | Citation |
|---|---|---|---|
| DLH | Difference light height | [29] | |
| DO | Three band Dall’Olmo | [30] | |
| EVI | Enhanced vegetation index | [31] | |
| NAOC | Normalized area over reflectance curve | [32] | |
| NDI | Normalized difference index | [8] | |
| NDTI | Normalized difference tillage index | [33] | |
| NDVI | Normalized difference vegetation index | [34] | |
| NDWI | Normalized difference water index | [35] | |
| TBI1 | Three band index 1 | [8] | |
| TBI2 | Three band index 2 | [8] |
| Variable | Evaluation Name | Train/Test Partitioning | Hyperparameter Tuning Partitioning |
|---|---|---|---|
| AGB | Random | 10-fold shuffled CV | 5-fold shuffled CV |
| Plot | LOGOCV grouped by experimental plot | 5-fold CV grouped by experimental plot | |
| Date | LOGOCV grouped by S2 acquisition date | 5-fold CV grouped by experimental date | |
| Location | Trained on BRU data, tested on NFREC data | 3-fold CV grouped by experimental plot | |
| %N | Random | 5-fold shuffled CV | 3-fold shuffled CV |
| Plot | LOGOCV grouped by experimental plot | 3-fold CV grouped by experimental plot | |
| Date | LOGOCV grouped by S2 acquisition date | 3-fold CV grouped by experimental date | |
| Year | LOGOCV grouped by year | 3-fold CV grouped by experimental plot |
| Evaluation | Feature Set | Algorithm | Train R2 | Train RMSE | Test R2 | Test RMSE |
|---|---|---|---|---|---|---|
| Random | Spectral bands + indices | LASSO | 0.68 | 715 | 0.65 | 759 |
| PCR | 0.68 | 717 | 0.63 | 769 | ||
| PLSR | 0.68 | 716 | 0.64 | 760 | ||
| RF | 1.00 | 73 | 0.71 | 683 | ||
| SVR | 0.87 | 465 | 0.72 | 679 | ||
| XGB | 1.00 | 58 | 0.69 | 704 | ||
| Plot | Spectral bands + indices | LASSO | 0.68 | 718 | 0.64 | 769 |
| PCR | 0.68 | 718 | 0.63 | 776 | ||
| PLSR | 0.68 | 717 | 0.63 | 774 | ||
| RF | 1.00 | 56 | 0.69 | 710 | ||
| SVR | 0.90 | 405 | 0.73 | 656 | ||
| XGB | 0.99 | 92 | 0.66 | 746 | ||
| Date | Spectral bands + indices | LASSO | 0.68 | 716 | 0.58 | 825 |
| PCR | 0.67 | 727 | 0.60 | 800 | ||
| PLSR | 0.68 | 724 | 0.59 | 811 | ||
| RF | 0.99 | 109 | 0.48 | 916 | ||
| SVR | 0.68 | 723 | 0.45 | 941 | ||
| XGB | 0.98 | 188 | 0.49 | 914 | ||
| Location | Spectral bands | LASSO | 0.66 | 791 | 0.27 | 923 |
| PCR | 0.63 | 820 | 0.28 | 915 | ||
| PLSR | 0.65 | 799 | 0.31 | 900 | ||
| RF | 1.00 | 0 | 0.05 | 1050 | ||
| SVR | 0.75 | 680 | 0.25 | 937 | ||
| XGB | 0.89 | 449 | 0.02 | 1069 |
| Evaluation | Feature Set | Algorithm | Train R2 | Train RMSE | Test R2 | Test RMSE |
|---|---|---|---|---|---|---|
| Random | Spectral bands + indices | LASSO | 0.75 | 0.29 | 0.65 | 0.34 |
| PCR | 0.74 | 0.29 | 0.66 | 0.33 | ||
| PLSR | 0.75 | 0.29 | 0.64 | 0.34 | ||
| RF | 0.99 | 0.05 | 0.57 | 0.37 | ||
| SVR | 0.80 | 0.25 | 0.65 | 0.34 | ||
| XGB | 0.97 | 0.10 | 0.50 | 0.40 | ||
| Plot | Spectral bands + indices | LASSO | 0.75 | 0.29 | 0.66 | 0.33 |
| PCR | 0.74 | 0.29 | 0.65 | 0.34 | ||
| PLSR | 0.75 | 0.29 | 0.66 | 0.33 | ||
| RF | 1.00 | 0.04 | 0.55 | 0.38 | ||
| SVR | 0.82 | 0.24 | 0.70 | 0.31 | ||
| XGB | 1.00 | 0.01 | 0.52 | 0.40 | ||
| Date | Spectral bands | LASSO | 0.72 | 0.30 | 0.60 | 0.36 |
| PCR | 0.69 | 0.31 | 0.53 | 0.39 | ||
| PLSR | 0.72 | 0.30 | 0.55 | 0.38 | ||
| RF | 0.99 | 0.05 | 0.20 | 0.51 | ||
| SVR | 0.72 | 0.30 | 0.55 | 0.38 | ||
| XGB | 0.97 | 0.10 | 0.25 | 0.49 | ||
| Year | Spectral bands | LASSO | 0.74 | 0.29 | 0.36 | 0.46 |
| PCR | 0.75 | 0.29 | 0.28 | 0.48 | ||
| PLSR | 0.74 | 0.29 | 0.21 | 0.51 | ||
| RF | 0.99 | 0.04 | −0.41 | 0.68 | ||
| SVR | 0.78 | 0.27 | 0.27 | 0.49 | ||
| XGB | 0.95 | 0.13 | −0.41 | 0.68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smith, H.D.; Dubeux, J.C.B.; Zare, A.; Wilson, C.H. Assessing Transferability of Remote Sensing Pasture Estimates Using Multiple Machine Learning Algorithms and Evaluation Structures. Remote Sens. 2023, 15, 2940. https://doi.org/10.3390/rs15112940
Smith HD, Dubeux JCB, Zare A, Wilson CH. Assessing Transferability of Remote Sensing Pasture Estimates Using Multiple Machine Learning Algorithms and Evaluation Structures. Remote Sensing. 2023; 15(11):2940. https://doi.org/10.3390/rs15112940
Chicago/Turabian StyleSmith, Hunter D., Jose C. B. Dubeux, Alina Zare, and Chris H. Wilson. 2023. "Assessing Transferability of Remote Sensing Pasture Estimates Using Multiple Machine Learning Algorithms and Evaluation Structures" Remote Sensing 15, no. 11: 2940. https://doi.org/10.3390/rs15112940
APA StyleSmith, H. D., Dubeux, J. C. B., Zare, A., & Wilson, C. H. (2023). Assessing Transferability of Remote Sensing Pasture Estimates Using Multiple Machine Learning Algorithms and Evaluation Structures. Remote Sensing, 15(11), 2940. https://doi.org/10.3390/rs15112940