
A Method Based on Improved iForest for Trunk Extraction and Denoising of Individual Street Trees

 ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Datasets
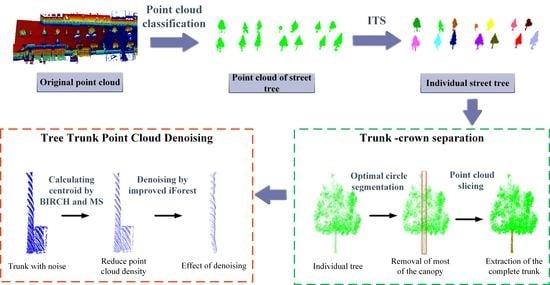
2.2. Overview of Methods
2.3. Evaluation Metrics
2.4. The Method of Trunk-Crown Separation
2.4.1. Adaptively Optimal Circle Segmentation
2.4.2. Trunk–Crown Separation Based on Slice
2.5. Tree Trunk Point Cloud Denoising
2.5.1. BIRCH Clustering
2.5.2. Improved iForest Algorithm
2.5.3. Trunk Denoising Method
3. Experiment and Results
3.1. Data Pre-Processing
3.2. Experimental Results
3.2.1. Street Tree Trunk-Crown Separation
3.2.2. Refined Trunk Denoising
4. Discussion
4.1. Trunk-Crown Separation
4.2. Trunk Denosing
4.3. Analysis of Failure Cases
4.4. Limitations and Perspectives
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nguyen, V.-T.; Constant, T.; Colin, F. An innovative and automated method for characterizing wood defects on trunk surfaces using high-density 3D terrestrial LiDAR data. Ann. For. Sci. 2021, 78, 32. [Google Scholar] [CrossRef]
- Chen, X.; Neubert, B.; Xu, Y.-Q.; Deussen, O.; Kang, S.B. Sketch-based tree modeling using Markov random field. ACM Trans. Graph. 2008, 27, 1–9. [Google Scholar]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Liu, T.; Im, J.; Quackenbush, L.J. A novel transferable individual tree crown delineation model based on Fishing Net Dragging and boundary classification. ISPRS J. Photogramm. Remote Sens. 2015, 110, 34–47. [Google Scholar] [CrossRef]
- Dai, W.; Yang, B.; Dong, Z.; Shaker, A. A new method for 3D individual tree extraction using multispectral airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 144, 400–411. [Google Scholar] [CrossRef]
- Fan, W.; Yang, B.; Dong, Z.; Liang, F.; Xiao, J.; Li, F. Confidence-guided roadside individual tree extraction for ecological benefit estimation. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102368. [Google Scholar] [CrossRef]
- Balenovi, I.; Liang, X.; Jurjevic, L.; Hyyppa, J.; Kukko, A. Hand-Held Personal Laser Scanning: Current Status and Perspectives for Forest Inventory Application. Croat. J. For. Eng. 2021, 42, 165–183. [Google Scholar] [CrossRef]
- Vandendaele, B.; Martin-Ducup, O.; Fournier, R.A.; Pelletier, G.; Lejeune, P. Mobile Laser Scanning for Estimating Tree Structural Attributes in a Temperate Hardwood Forest. Remote Sens. 2022, 14, 4522. [Google Scholar] [CrossRef]
- Sun, W.; Wang, J.; Jin, F.; Yang, Y. A quality improvement method for 3D laser slam point clouds based on geometric primitives of the scan scene. Int. J. Remote Sens. 2020, 42, 378–388. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, T.; Liu, J.; Li, X.; Liang, C. Hierarchical Instance Recognition of Individual Roadside Trees in Environmentally Complex Urban Areas from UAV Laser Scanning Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 595. [Google Scholar] [CrossRef]
- Liu, H.; Wu, C. Tree Crown Width Estimation, Using Discrete Airborne LiDAR Data. Can. J. Remote Sens. 2016, 42, 610–618. [Google Scholar] [CrossRef]
- Kwong, I.H.Y.; Fung, T. Tree height mapping and crown delineation using LiDAR, large format aerial photographs, and unmanned aerial vehicle photogrammetry in subtropical urban forest. Int. J. Remote Sens. 2020, 41, 5228–5256. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Liang, X. Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Lin, W.; Meng, Y.; Qiu, Z.; Zhang, S.; Wu, J. Measurement and calculation of crown projection area and crown volume of individual trees based on 3D laser-scanned point-cloud data. Int. J. Remote Sens. 2017, 38, 1083–1100. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M. Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 104–114. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Anderson-Teixeira, K.J.; Shugart, H.H. Assessing terrestrial laser scanning for developing non-destructive biomass allometry. For. Ecol. Manag. 2018, 427, 217–229. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.K.; Oude Elberink, S.J.; Vosselman, G. Tree modelling from mobile laser scanning data-sets. Photogramm. Rec. 2011, 26, 361–372. [Google Scholar] [CrossRef]
- Luo, D.; Yan-Min, W. Rapid extracting pillars by slicing point clouds. International Archives of Photogrammetry. Remote Sens. Spat. Inf. Sci. 2008, 37, 215–218. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Cabo, C.; Ordoñez, C.; García-Cortés, S.; Martínez, J. An algorithm for automatic detection of pole-like street furniture objects from Mobile Laser Scanner point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 87, 47–56. [Google Scholar] [CrossRef]
- Yu, Y.; Li, J.; Guan, H.; Wang, C.; Yu, J. Semiautomated Extraction of Street Light Poles from Mobile LiDAR Point-Clouds. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1374–1386. [Google Scholar] [CrossRef]
- Huang, J.; You, S. Pole-like object detection and classification from urban point clouds. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3032–3038. [Google Scholar]
- Kang, Z.; Yang, J. A probabilistic graphical model for the classification of mobile LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 143, 108–123. [Google Scholar] [CrossRef]
- Monnier, F.; Vallet, B.; Soheilian, B. Trees Detection from Laser Point Clouds Acquired in Dense Urban Areas by a Mobile Mapping System. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 3, 245–250. [Google Scholar] [CrossRef]
- Lamprecht, S.; Stoffels, J.; Dotzler, S.; Haß, E.; Udelhoven, T. aTrunk—An ALS-Based Trunk Detection Algorithm. Remote Sens. 2015, 7, 9975–9997. [Google Scholar] [CrossRef]
- Li, L.; Li, D.; Zhu, H.; Li, Y. A dual growing method for the automatic extraction of individual trees from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2016, 120, 37–52. [Google Scholar] [CrossRef]
- Xu, S.; Xu, S.; Ye, N.; Zhu, F. Individual stem detection in residential environments with MLS data. Remote Sens. Lett. 2017, 9, 51–60. [Google Scholar] [CrossRef]
- Hyyppä, E.; Kukko, A.; Kaijaluoto, R.; White, J.C.; Wulder, M.A.; Pyörälä, J.; Liang, X.; Yu, X.; Wang, Y.; Hyyppä, J.; et al. Accurate derivation of stem curve and volume using backpack mobile laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 161, 246–262. [Google Scholar] [CrossRef]
- Ai, M.; Yao, Y.; Hu, Q.; Wang, Y.; Wang, W. An Automatic Tree Skeleton Extraction Approach Based on Multi-View Slicing Using Terrestrial LiDAR Scans Data. Remote Sens. 2020, 12, 3824. [Google Scholar] [CrossRef]
- Xu, S.; Sun, X.; Yun, J.; Wang, H. A New Clustering-Based Framework to the Stem Estimation and Growth Fitting of Street Trees from Mobile Laser Scanning Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3240–3250. [Google Scholar] [CrossRef]
- Neuville, R.; Bates, J.S.; Jonard, F. Estimating Forest Structure from UAV-Mounted LiDAR Point Cloud Using Machine Learning. Remote Sens. 2021, 13, 352. [Google Scholar] [CrossRef]
- Alvites, C.; Santopuoli, G.; Hollaus, M.; Pfeifer, N.; Maesano, M.; Moresi, F.V.; Marchetti, M.; Lasserre, B. Terrestrial Laser Scanning for Quantifying Timber Assortments from Standing Trees in a Mixed and Multi-Layered Mediterranean Forest. Remote Sens. 2021, 13, 4265. [Google Scholar] [CrossRef]
- Li, M.; Sun, C. Refinement of LiDAR point clouds using a super voxel based approach. ISPRS J. Photogramm. Remote Sens. 2018, 143, 213–221. [Google Scholar] [CrossRef]
- Balta, H.; Velagic, J.; Bosschaerts, W.; Cubber, G.; Siciliano, B. Fast Statistical Outlier Removal Based Method for Large 3D Point Clouds of Outdoor Environments. IFAC-Pap. Line 2018, 22, 348–353. [Google Scholar] [CrossRef]
- Pirotti, F.; Ravanelli, R.; Fissore, F.; Masiero, A. Implementation and assessment of two density-based outlier detection methods over large spatial point clouds. Open Geospat. Data Softw. Stand. 2018, 3, 14. [Google Scholar] [CrossRef]
- Hua, Z.; Xu, S.; Liu, Y. Individual Tree Segmentation from Side-View LiDAR Point Clouds of Street Trees Using Shadow-Cut. Remote Sens. 2022, 14, 5742. [Google Scholar] [CrossRef]
- De Conto, T.; Olofsson, K.; Görgens, E.B.; Rodriguez, L.C.E.; Almeida, G. Performance of stem denoising and stem modeling algorithms on individual tree point clouds from terrestrial laser scanning. Comput. Electron. Agric. 2017, 143, 165–176. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Méndez, V.; Rosell-Polo, J.R.; Sanz, R.; Escolà, A.; Catalán, H. Deciduous tree reconstruction algorithm based on cylinder fitting from mobile terrestrial laser scanned point clouds. Biosyst. Eng. 2014, 124, 78–88. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Vastaranta, M. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Cao, W.; Wu, J.; Shi, Y.; Chen, D. Restoration of Individual Tree Missing Point Cloud Based on Local Features of Point Cloud. Remote Sens. 2022, 14, 1346. [Google Scholar] [CrossRef]
- Roynard, X.; Deschaud, J.-E.; Goulette, F. Paris-Lille-3D: A large and high-quality ground-truth urban point cloud dataset for automatic segmentation and classification. Int. J. Robot. Res. 2018, 37, 545–557. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Chave, J.; Andalo, C.; Brown, S.; Cairns, M.A.; Chambers, J.Q.; Eamus, D.; Fölster, H.; Fromard, F.; Higuchi, N.; Yamakura, T. Tree allometry and improved estimation of carbon stocks and balance in tropical forests. Oecologia 2005, 145, 87–99. [Google Scholar] [CrossRef]
- Zhang, T.; Ramakrishnan, R.; Livny, M. BIRCH: An efficient data clustering method for very large databases. SIGMOD Rec. 1996, 25, 103–114. [Google Scholar] [CrossRef]
- Charest, L.; Plante, J.-F. Using balanced iterative reducing and clustering hierarchies to compute approximate rank statistics on massive datasets. J. Stat. Comput. Simul. 2013, 84, 2214–2232. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.-H. Isolation forest. In Proceedings of the 2008 Eighth IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; pp. 413–422. [Google Scholar]
- Karczmarek, P.; Kiersztyn, A.; Pedrycz, W.; Al, E. K-Means-based isolation forest. Knowl.-Based Syst. 2020, 195, 105659. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, G.; Wang, X.; Shu, M. Fore-Net: Efficient inlier estimation network for large-scale indoor scenario. ISPRS J. Photogramm. Remote Sens. 2022, 184, 165–176. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trimble MX9 | GEOSLAM ZEB-Horizon | ||||
|---|---|---|---|---|---|
| Datalogger Carrier | Vehicle-Borne | Datalogger Carrier | Backpack or Shoulder Strap | ||
| Scan speed | 500 scans/sec | Scanner points per second | 300,000 | ||
| Laser class | 1, eye-safe | Laser class | 1, eye-safe | ||
| Maximum range target Reflectivity > 80%2 | 475 m | 370 m | 235 m | Range | 100 m |
| Vertical angular resolution | 2° | ||||
| Maximum range target Reflectivity > 10%2 | 170 m | 130 m | 85 m | Horizontal angular resolution | 0.2° |
| Minimum range | 1 m @ PRR ≥ 1 MHz, 1.2 m @ PRR < 1 MHz | Raw data file size | 25–50 MB/min | ||
| Accuracy3/precision4 | 5 mm/3 mm | Relative accuracy | Up to 6 mm | ||
| Field of view | 360° “full circle” | Field of View | 360° × 270° | ||
| Dataset | Category | Number | Mean Tree Height | Mean DBH | Mean Canopy |
|---|---|---|---|---|---|
| 1 | broad-leaved forest | 14 | 11.31 m | 0.36 m | 3.91 m |
| 2 | broad-leaved forest | 48 | 9.46 m | 0.16 m | 7.42 m |
| 3 | broad-leaved forest | 29 | 11.06 m | 0.15 m | 8.35 m |
| 4 | coniferous forest | 19 | 10.84 m | 0.94 m | 6.73 m |
| 5 | coniferous forest | 14 | 16.80 m | 0.17 m | 6.40 m |
| Data | Methods | TP | FP | FN | Precision (%) | Recall (%) | F-Score |
|---|---|---|---|---|---|---|---|
| 1 | Proposed method | 1540 | 8 | 128 | 99.48 | 92.32 | 0.96 |
| iForest | 1320 | 701 | 454 | 65.31 | 74.41 | 0.70 | |
| Radius Filter | 606 | 706 | 479 | 46.19 | 55.85 | 0.51 | |
| SOR Filter | 1223 | 504 | 660 | 70.81 | 64.95 | 0.68 | |
| 2 | Proposed method | 1641 | 180 | 245 | 90.11 | 87.01 | 0.89 |
| iForest | 1724 | 1082 | 255 | 61.44 | 87.11 | 0.72 | |
| Radius Filter | 487 | 1111 | 334 | 30.48 | 59.32 | 0.40 | |
| SOR Filter | 1165 | 464 | 806 | 71.52 | 59.11 | 0.65 | |
| 3 | Proposed method | 2036 | 86 | 231 | 95.94 | 89.81 | 0.93 |
| iForest | 1696 | 333 | 261 | 83.58 | 86.66 | 0.85 | |
| Radius Filter | 999 | 1923 | 628 | 34.19 | 61.40 | 0.44 | |
| SOR Filter | 1560 | 1439 | 1428 | 52.02 | 52.21 | 0.52 | |
| 4 | Proposed method | 4125 | 16 | 940 | 99.61 | 81.44 | 0.90 |
| iForest | 3800 | 230 | 840 | 94.29 | 81.90 | 0.88 | |
| Radius Filter | 1060 | 3299 | 906 | 24.32 | 53.92 | 0.34 | |
| SOR Filter | 3063 | 800 | 1858 | 79.29 | 62.24 | 0.70 | |
| Average | Proposed method | 96.29 | 87.65 | 0.91 | |||
| iForest | 76.16 | 82.52 | 0.79 | ||||
| Radius Filter | 33.79 | 57.62 | 0.42 | ||||
| SOR Filter | 68.41 | 59.63 | 0.64 |
| Dataset | TP | FP | FN | Precision (%) | Recall (%) | F-Score |
|---|---|---|---|---|---|---|
| 1. Dataset 1 | 13 | 0 | 1 | 100 | 92.85 | 0.96 |
| 2. Dataset 2 | 43 | 1 | 4 | 97.73 | 91.49 | 0.94 |
| 3. Dataset 3 | 29 | 0 | 0 | 100 | 100 | 1 |
| 4. Dataset 4 | 18 | 1 | 0 | 94.73 | 100 | 0.97 |
| 5. Dataset 5 | 12 | 2 | 0 | 85.71 | 100 | 0.92 |
| Total | 115 | 4 | 5 | 96.64 | 95.83 | 0.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wang, J.; Zhang, Z.; Jin, F.; Yang, J.; Sun, W.; Cao, Y. A Method Based on Improved iForest for Trunk Extraction and Denoising of Individual Street Trees. Remote Sens. 2023, 15, 115. https://doi.org/10.3390/rs15010115
Li Z, Wang J, Zhang Z, Jin F, Yang J, Sun W, Cao Y. A Method Based on Improved iForest for Trunk Extraction and Denoising of Individual Street Trees. Remote Sensing. 2023; 15(1):115. https://doi.org/10.3390/rs15010115
Chicago/Turabian StyleLi, Zhiyuan, Jian Wang, Zhenyu Zhang, Fengxiang Jin, Juntao Yang, Wenxiao Sun, and Yi Cao. 2023. "A Method Based on Improved iForest for Trunk Extraction and Denoising of Individual Street Trees" Remote Sensing 15, no. 1: 115. https://doi.org/10.3390/rs15010115
APA StyleLi, Z., Wang, J., Zhang, Z., Jin, F., Yang, J., Sun, W., & Cao, Y. (2023). A Method Based on Improved iForest for Trunk Extraction and Denoising of Individual Street Trees. Remote Sensing, 15(1), 115. https://doi.org/10.3390/rs15010115