1. Introduction
With the increasing importance of space utilization, the surveillance of space targets has become an important topic [
1]. Inverse synthetic aperture radar (ISAR) has been widely used to observe non-cooperative space targets such as satellites and space debris due to its advantages of all-weather, all-day, and long-range [
2,
3,
4]. However, aside from the bulk’s translational motion, a space target usually follows a spinning motion around its major axis [
5,
6]. For a high-resolution imaging radar, the rapidly spinning motion of the target causes the large range-cell migration (RCM) and the highly nonstationary Doppler frequency modulation (DFM). Therefore, the traditional RD algorithm finds it difficult to efficiently obtain well-focused ISAR images for rapidly spinning targets.
In recent years, many ISAR imaging methods have been proposed for rapidly spinning targets [
7,
8,
9,
10,
11,
12,
13]. The generalized radon transform (GRT) is proposed in [
14] to obtain a 3D ISAR image of spinning targets by estimating the parameters of the sinusoidal envelopes in the range-slow time domain after range compression. Similar to GRT, Hough transform (HT) and extended HT (EHT) are also used to detect the sinusoidal envelopes and obtain a 3D ISAR image [
15]. In [
16], a modified complex valued back-projection algorithm implements the energy accumulation along different sinusoidal trajectories in the range-slow time domain, and then the 3D image is obtained by combining the height information. In [
17], the modified particle swarm optimization (MPSO) algorithm extracts the height coordinates and envelopes of strong scatterers and used envelopes as the input of inverse radon transform (IRT) to estimate the 2D coordinates of scatterers, and finally scaled the coordinates to obtain the 3D image. In [
18], an ISAR imaging method is proposed to extract the energy of scatterers distributed in different range cells along the rotation radius in the range-Doppler domain and compensate for the higher-order phase term of the signal. These spinning target imaging methods mainly detect the sinusoidal envelopes in the range-slow time domain after range compression by maximizing the accumulated energy. Accumulation includes coherent accumulation of complex envelope and incoherent accumulation of real envelope. Although coherent accumulation can be applied under lower signal-to-noise ratio (SNR) conditions, it is susceptible to phase disturbance and Doppler ambiguity. For ISAR imaging, SNR required by incoherent accumulation can generally meet the requirements [
19]. Regardless of coherent accumulation or incoherent accumulation, these methods require that the translational motion has been compensated. However, due to the complexity of translational motion compensation (TMC) for rapidly spinning targets, all the above methods ignore TMC, assuming that the echoes have been accurately compensated.
Translation motion compensation consists of range alignment, which shifts the echoes such that the signals from the same scatterer are centered at the same range bin in different echoes, and phase adjustment, which removes the Doppler phase caused by the translation. Coherent accumulation requires accurate range envelope alignment and phase adjustment, while incoherent accumulation only requires accurate range envelope alignment. If no prior knowledge is available about the translation, range alignment is usually based on the similarity of the envelopes of the echoes. Typical methods include the peak method [
20,
21,
22], the maximum-correlation method [
20,
21,
22], the frequency-domain method [
20,
21,
22], the Hough-transform method [
23], and the minimum-entropy method [
24,
25]. However, the large migration through range cells (MTRC) results in weak coherence between adjacent echoes, which makes the conventional envelope alignment method unable to be applied.
Although the coherence of adjacent pulses of rapidly spinning targets is weak, there is a strong correlation between two pulses separated by one rotation period in azimuth time. The target can be considered to be spinning uniformly for a short time. Therefore, after the rotation period of the target is estimated, the shifts of two pulses separated by one rotation period in azimuth time can be calculated by using the envelope alignment method, and then the translational range difference between the two pulses can be obtained. Kalman filtering (KF) is an optimal estimator that works under the linear restrain system [
26]. The KF can recover the signal based on the measurement value and observation noise statistics, whose probability density functions (PDFs) are both supposed to be Gaussian. KF has been used in many applications, such as satellite navigation and global positioning systems [
27]. In the KF principle, the signal of interest, i.e., the state vector, is estimated and corrected in each iteration to obtain the desired accurate estimate. In a short time, the shifts made to the echoes are modeled as a polynomial. Therefore, Kalman filtering is performed on the translation range difference and the the precise parameters of the translation motion can be obtained. Then, a translational motion compensation function is constructed through the parameters estimated by the KF.
To consider the problem of weak coherence between adjacent echoes due to large MTRC of targets in the case of a rapidly spinning motion, a translational motion compensation method for fast spin motion targets using the Kalman filter is proposed in this paper. To that end, the spin period and rotational speed of the target need to be estimated. Therefore, an improved method for estimating the spin period of a rotating target is proposed. Firstly, the rotation period of the target is estimated by the incoherent accumulation method for the echo signal after range compression. Secondly, by utilizing the strong correlation between two pulses separated by one rotation period in azimuth time, the shifts of two pulses can be calculated by using the envelope alignment method, and then the translational range difference between the two pulses can be obtained. Then, the relative translation motion of radar and target is obtained by Kalman filtering through constructing a state equation and observation equation. Finally, a TMC function is constructed according to the result of Kalman filtering to compensate the phase items caused by translational motion. Thanks to the very small relative error of the estimated distance difference, the translational motion is estimated very accurately. In addition, the filtering performance of our proposed method is superior under low SNR environments because of the adaptive selection of observation noise covariance.
This paper is organized as follows. The geometric and signal model for rapidly spinning targets is introduced in
Section 2. In
Section 3, a rotation period estimation method of incoherent accumulation is proposed. An efficient translational motion compensation algorithm based on Kalman filtering is proposed in detail, and some considerations are analyzed in
Section 4. Then, the simulation results and analysis are presented in
Section 5, to demonstrate the effectiveness of the proposed method. Finally, some discussion and conclusions are provided in
Section 6 and
Section 7.
2. Geometric and Signal Model for Rapidly Spinning Targets
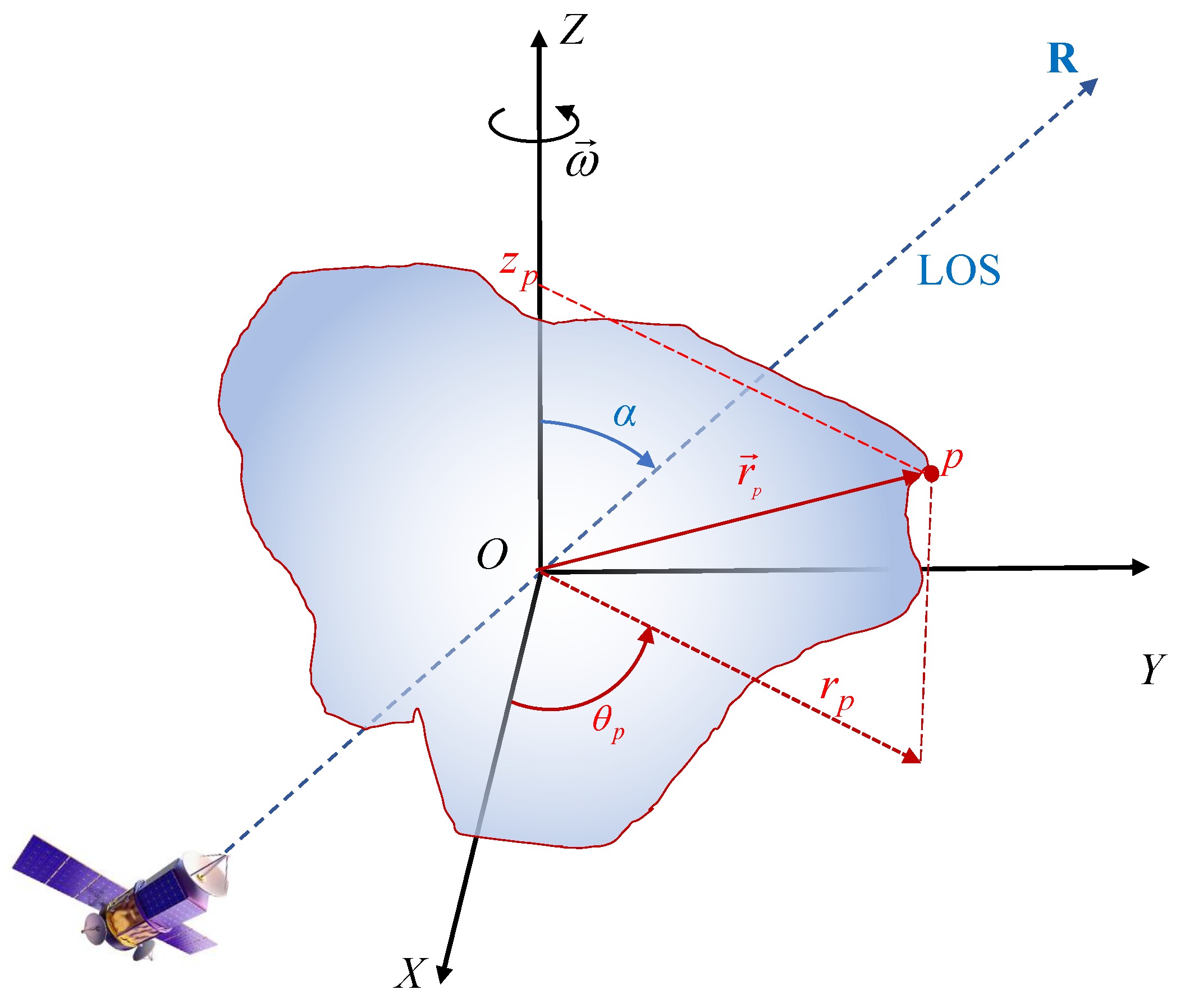
The geometric model for space debris with rapid spinning is illustrated in
Figure 1. The definitions of notation are given as follows.
denotes a Cartesian coordinate, and
denotes a cylindrical coordinate. The relation between the two coordinate systems is
Origin O is the position of the rotating center, and target is spinning around the Z-axis at a rotation speed of . in the YOZ plane denotes the unit vector of the radar line-of-sight (LOS), and denotes the angle between and Z-axis.The direction vector of arbitrary scatterer p is and the initial phase of scatterer p in the XOY plane is . Therefore, the cylindrical coordinate of scatterer P is , where and denote the projection of on XOY plane and height of scatterer P, respectively.
The radar transmits a linear frequency-modulated (LFM) signal, and it is
where
,
,
, and
denote the fast time in the range direction, carrier frequency of radar signal, pulsewidth, and the frequency modulation rate, respectively. In addition,
is the amplitude modulation term that is presented as
Supposing the number of scatterers is
P, then the received baseband signal after down conversion can be written as
where
is azimuth slow time,
c denotes speed of light and
corresponds to the reflectivity of the
pth scatterer. In (
4),
denotes the instantaneous slant range of scatterer
p, and it is
In (
5),
denotes the relative range generated by translational motion between radar and target, which is the same for all scatterers at
, so it has no contribution to imaging and needs to be compensated, which can be expressed as
where
and
denote the relative range, relative velocity, relative acceleration and relative acceleration rate of the radar and target, respectively, at the starting time. The initial Cartesian coordinate of scatterer
p is
. Therefore, the instantaneous coordinate
of scatterer
p can be represented as
at azimuth time
.
denotes the range migration of scatterer
p due to the target spinning. It is different for each scattering point and shows the motion characteristic of scatterer
p, which can be expressed as
where
. In (
7), neither
nor
varies with azimuth slow time. Therefore, the analysis is based on the uniform rotation of the target and the fixed angle between the LOS and the target axis of rotation during the imaging time.
After the range compression, the signal can be written as
where
r is range,
B is the bandwidth of the radar, and
is the sinc function.
If the relative range generated by translational motion can be estimated, then the compensation function of the translational motion is
where
is the estimate of
. By applying Fourier transform (FT) to
r in (
8) and then multiplying the transformed expression by (
9), we can obtain
By applying Inverse Fourier transform (IFT) to
in (
10), one obtains
where
is the residual phase after translational motion compensation, which is caused by the inaccurate estimation of the relative range. We perform incoherent accumulation on the real envelopes of (
11), such as GRT, to obtain the 3D image of the target. If the estimation of the relative distance is extremely accurate,
can be ignored.
3. Estimation of Rotation Period
In conventional ISAR imaging, for two adjacent echoes, the angle of rotation of the target is generally less than . Therefore, the scatterer migration is very small, and the real envelopes of the echoes are very similar. In this case, the alignment of adjacent envelopes can be well-achieved using a cross-correlation approach. However, the above method is not suitable for rapidly spinning targets. If the spin frequency of the target is 1 Hz, and a radar with a pulse repetition frequency (PRF) of 1000 Hz is used for observation, the rotation angle between two adjacent echoes is about . This means that the scatterer movement in two adjacent echoes cannot be ignored. It is hard to accurately align adjacent envelopes by the cross-correlation method. More importantly, the alignment method by adjacent echoes is prone to envelope drift and envelope jump, and the average range envelope is meaningless in this case.
Although the correlation between the adjacent echoes of a rapidly spinning target is weak, there is a strong correlation between arbitrary echo and the echo delayed by one rotation period in azimuth time. Therefore, using the correlation method to align the envelopes of these two echoes can achieve a good alignment effect. When the product of the rotation period and PRF is not an integer, for example, the target rotation period is (
N + n)PRT, where
N is an integer and
n is a decimal. Due to the discreteness of azimuth sampling, the estimated target rotation period is
NPRT, so the error of
nPRT is generated. Even so, the method can still ensure a better alignment effect than the adjacent envelopment alignment method.
s(
m) denotes the range envelope at azimuth time
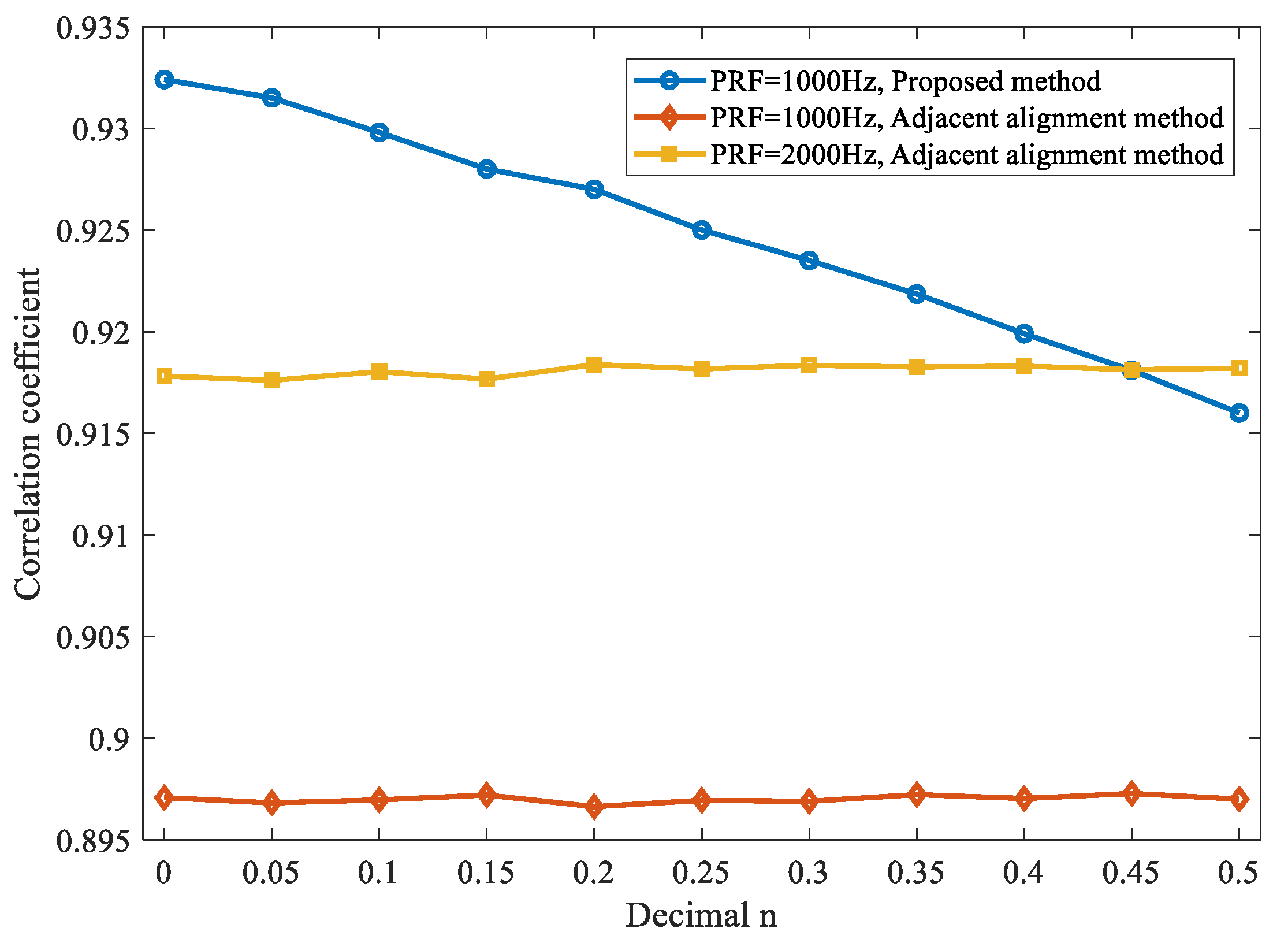
m. As shown in
Figure 2, the correlation coefficient between
s(
m) and
s(
m + N) is greater than that between s(
m) and
s(
m + 1) under the same PRF. The higher the PRF of the radar, the stronger the correlation between adjacent echoes, and the strong correlation between echoes can bring about better envelope alignment. It can be seen from the
Figure 2 that the correlation coefficient of the two echo envelopes separated by one rotation period in azimuth time under low PRF is even higher than the correlation coefficient of two adjacent echo envelopes under high PRF.
The rotation period of the target needs to be known in advance. The rotation period can be estimated by analyzing the correlation between the signals of the spinning target.
The cross-correlation function of the two signals at
and
is
where
and
denote two signals at
and
, respectively, and
denotes conjugation. In other words,
denotes the shift value of the range fast time,
denotes the shift value of the azimuth slow time, and
denotes the azimuth time of the selected pulse. Correlation can be quickly achieved by Fourier transform, and the cross-correlation function can be written as
By applying Fourier transform (FT) to
r in the real envelope of (
8), one obtains
Conjugate multiplication of the two echoes at azimuth time
and
, one obtains
It can be seen from (
15) that
consists of two parts. The first term is the self-term of the conjugate multiplication of the same sub-echoes, and the second term is the cross term of the conjugate multiplication of the different sub-echoes. For the scatterer
p, the range difference between the two echoes is
where
denotes the range difference introduced by the target translational motion, and
denotes the range difference introduced by the target spinning. From (
7), one obtains
By applying inverse Fourier transform (IFT) to
in (
15), one obtains
For many scatterers, each component of the cross term in (
15) can be approximated as the cosine variation in the fluctuation. If we only consider the self-term of the same sub-echo conjugate multiplication, (
18) can be abbreviated as
of all sub-echoes are identical, and
achieves the maximum value when
and
. There is
at this time, that is
Therefore, the target rotation period can be estimated by the maximum correlation method.
Although the method of target rotation period estimation by sliding cross-correlation has been proposed, it is found that the delay corresponding to the maximum value of the sliding correlation is probably not a rotation period. This is because the above analysis is based on ignoring cross-terms and noise. In practice, due to the influence of the cross-terms and noise, when , may also achieve the maximum value. In this case, the rotation period obtained by the maximum value of the sliding cross-correlation is wrong.
Since the cross term can be approximated as the cosine change in fluctuation and the noise is randomly distributed, the influence of the cross term and noise can be reduced by the method of accumulation. In addition, it can be seen from (
19) that, in the case of ignoring the cross term, the maximum of correlation is only related to
and has nothing to do with
.
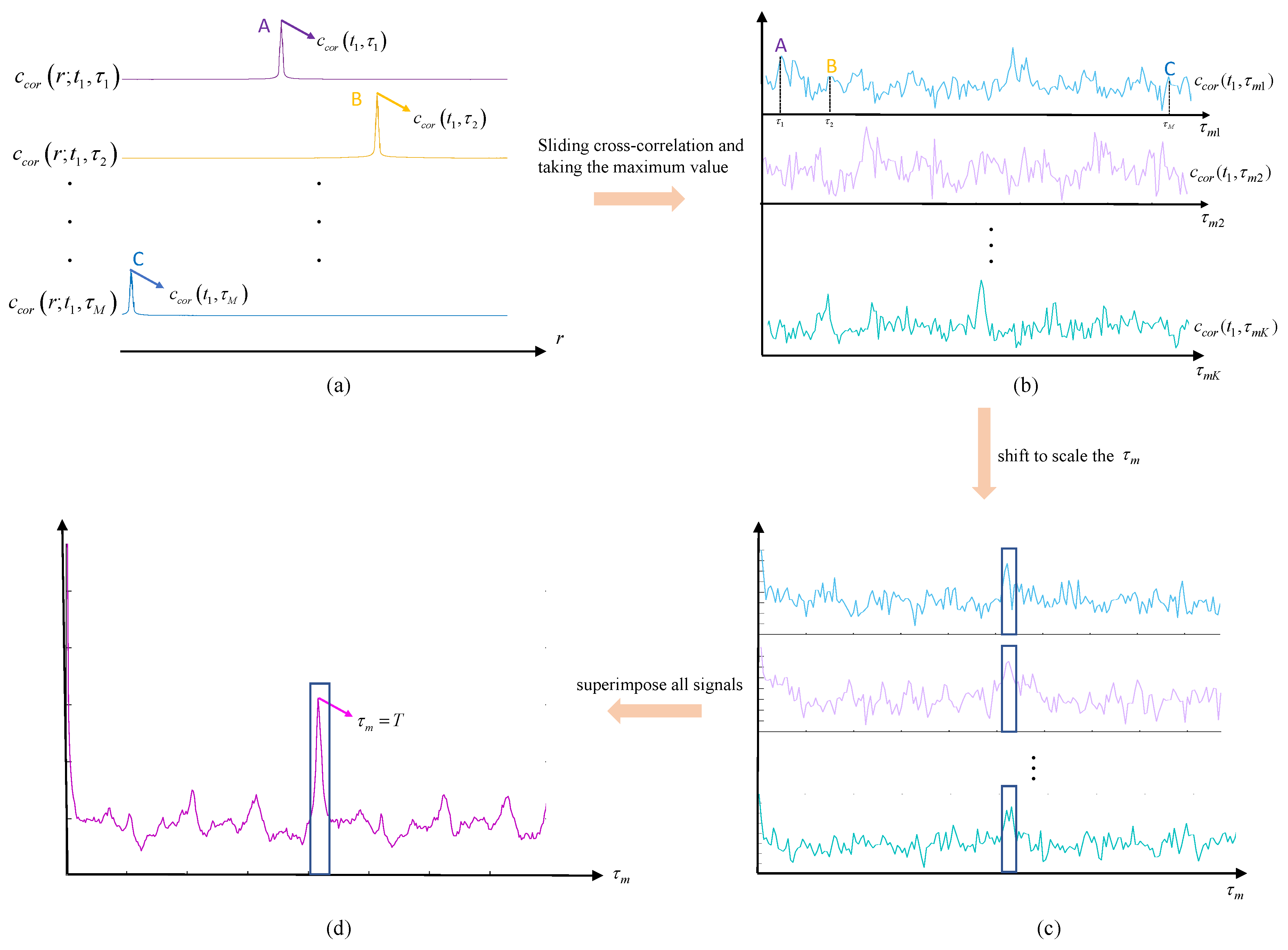
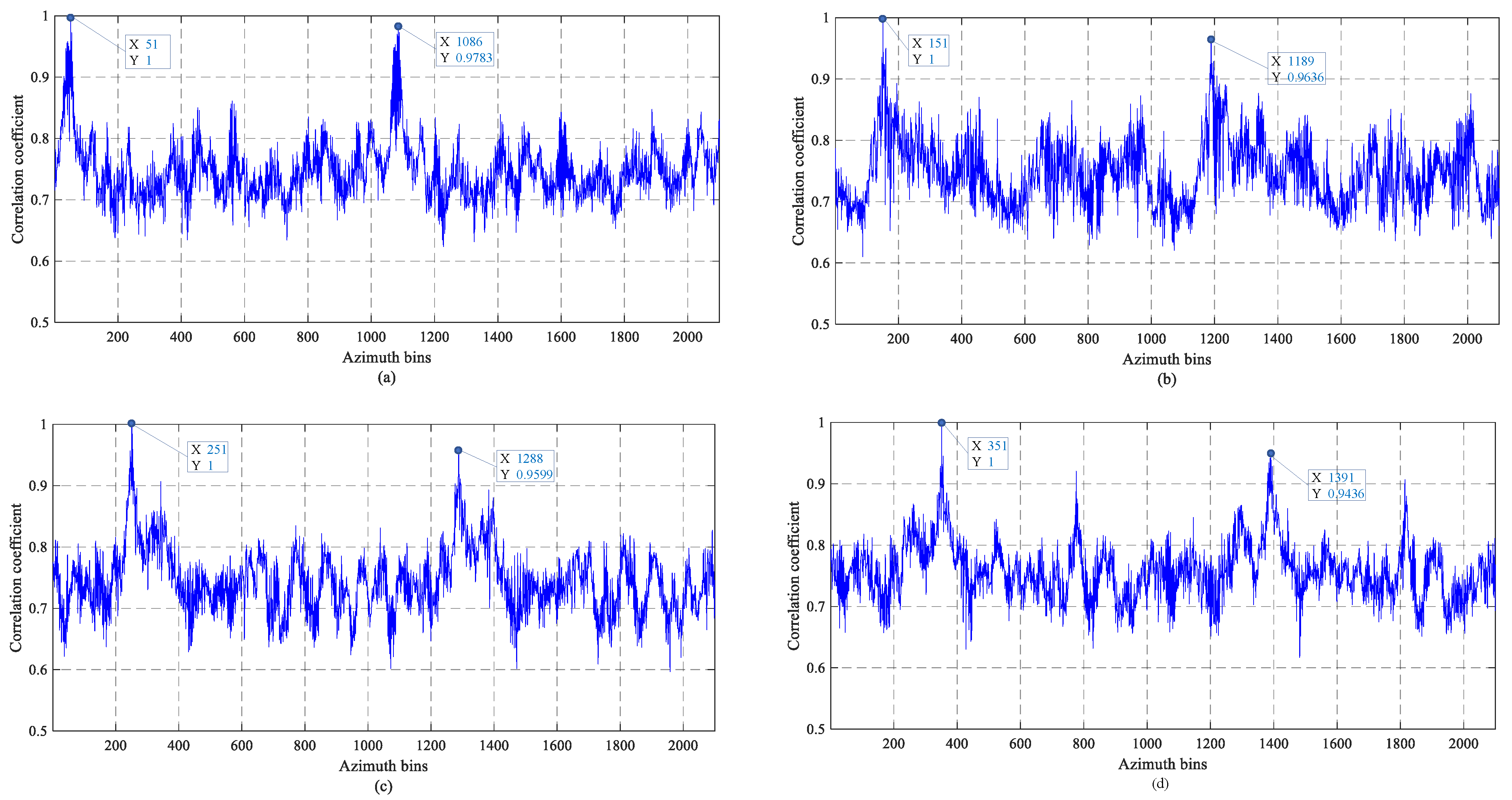
Based on the above analysis, an improved rotation period estimation method is proposed. The concrete implementation steps are as follows:
(1) Select
K signals
after the range compression and carry out sliding cross-correlation with other signals to obtain the correlation coefficient. To clearly see this, the sliding cross-correlation and correlation coefficient are shown in
Figure 3a,b, respectively. After that, (
19) can be approximated as
(2) Change
of the
ith signal into
by shifting, as shown in
Figure 3c. The purpose of this step is to make all
have the same
;
(3) Add the
of the
K signals that have been shifted, as shown in
Figure 3d, and the
corresponding maximum is the target rotation period
T.
4. Kalman Filtering
4.1. Target Tracking Algorithm Based on Kalman Filtering
From the KF principle, the state vector can be estimated and corrected in each iteration based on the transition and observation matrices. The transition matrix describes the change in the quantities of the state vector at each state, while the observation matrix denotes the relationship between the state vector and the measurement value. During the tracking procedure, at each iteration, the state vector is first estimated according to the transition state matrix and then corrected based on the current measurement value.
Assuming that there are N pulses in one rotation period T, without loss of generality, 2N pulses of two periods are considered here. The range cell migration is received by aligning the mth range envelope in the previous period with the (m + N)th range envelope in the next period. Then, the relative translational range difference from to can be obtained. By aligning all the range envelopes in the two spinning periods, can be acquired.
Generally, the relative motion state does not change drastically in a short time. Therefore, parameter
of the range polynomial between the target and the radar in the previous period is taken as the state value, and the translational range difference
obtained from the alignment of the echo envelope is taken as the observation value. The state equation and observation equation of Kalman filtering are established as follows:
with
where
k and
k + 1 are the indices of the current and the next values.
denotes the state vector.
F is the transition matrix that describes the transform of the state vector from prior state to the current state.
is the measurement value and
H is the observation matrix that represents the relationship between the state vector
and observation value
.
is the noise vector, which describes the uncertainty of the updated state of the prior iteration. The components of
follow the zero-mean Gaussian distribution with covariance matrix
, where
I is the identity matrix.
denotes the observation noise, and its components follow the zero-mean Gaussian distribution with covariance matrix
. The specific steps of iteration are as follows:
(1) Initialize the initial state
and perform state prediction:
where the superscripts
on the variables denote that they are the predicted variables.
(2) Initialize the covariance matrix
of the estimation error
, and perform covariance matrix prediction:
Since the order of F is sufficiently high, Q can be regarded as a diagonal matrix with very small diagonal elements, or .
(3) Determine the Kalman gain:
denotes the Kalman gain of the
kth iteration, and one obtains
Because the observation is received through the correlation of the two echoes, and the correlation method is affected by the SNR, W is related to the SNR of the echo. The specific situation will be analyzed in the next subsection.
(4) Calculate the new state estimation and covariance matrix:
In conclusion, the prediction of (
26) and (
27) and update of (
28)–(
30) can refine the measurement value to the accurate state vector as iteration continues.
Through the above iterations, the relative distance at each sampling moment in the first rotation period can be acquired. Accordingly, the relative range between the radar and target at each sampling moment in the second rotation period is . In order to reduce the impact of excessive alignment errors, Kalman filtering is performed again on .
When the echo contains multiple spinning periods, the above operations are performed on the adjacent periods, respectively, and the relative translational motion curve of the radar and the target during the total observation time is obtained.
4.2. Influence of Echo SNR on KF and Estimation of Observation Noise Covariance W
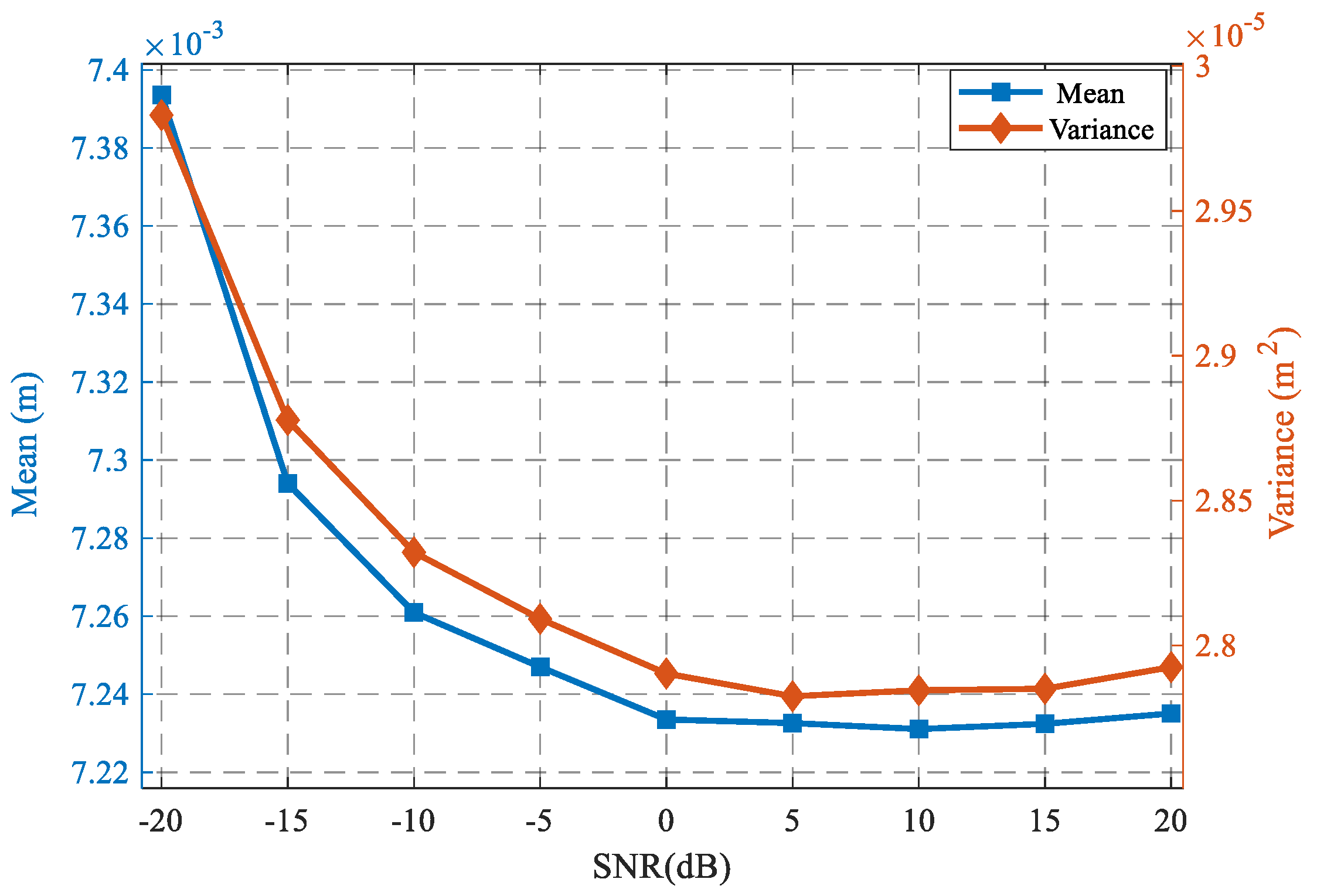
The observations of KF are received by cross-correlation of two signals. However, the correlation between signals is affected by the SNR. When the SNR is low, it is difficult to achieve precise shifting because the cross-correlation method is affected by noise, which results in large noises of the observations.
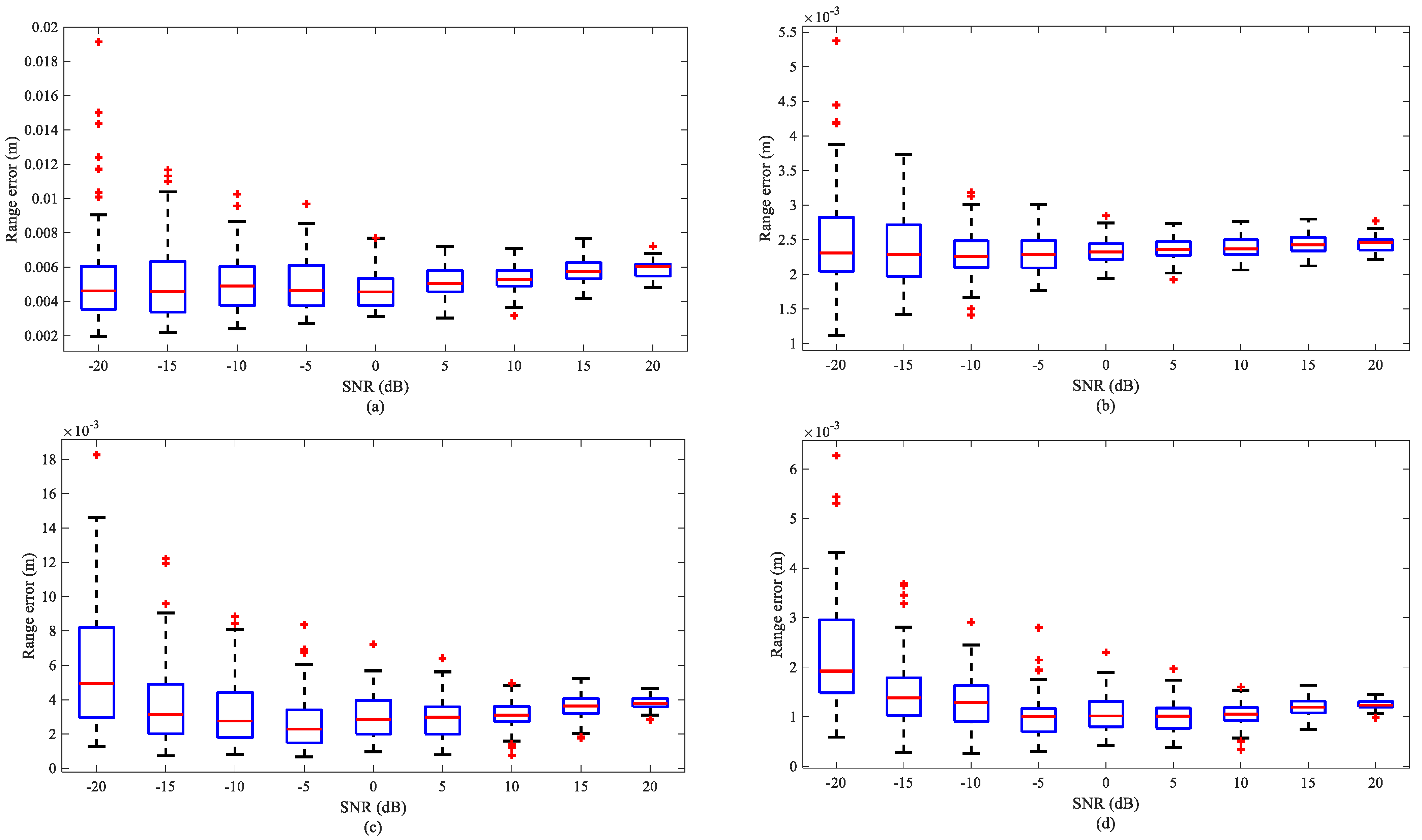
In order to verify the above analysis, the simulation adds Gaussian noise to the echo to make the SNR of the echo range from
dB to 20 dB. After 100 Monte Carlo experiments, the average curve of the mean and variance of the absolute value of the observation noise as a function of the SNR is shown in
Figure 4. It can be seen that the mean and variance of the absolute value of the observation noise with a low SNR are greater than that with a high SNR.
The observation noise covariance matrix
W affects the Kalman gain
K, and ultimately affects the filtering result.
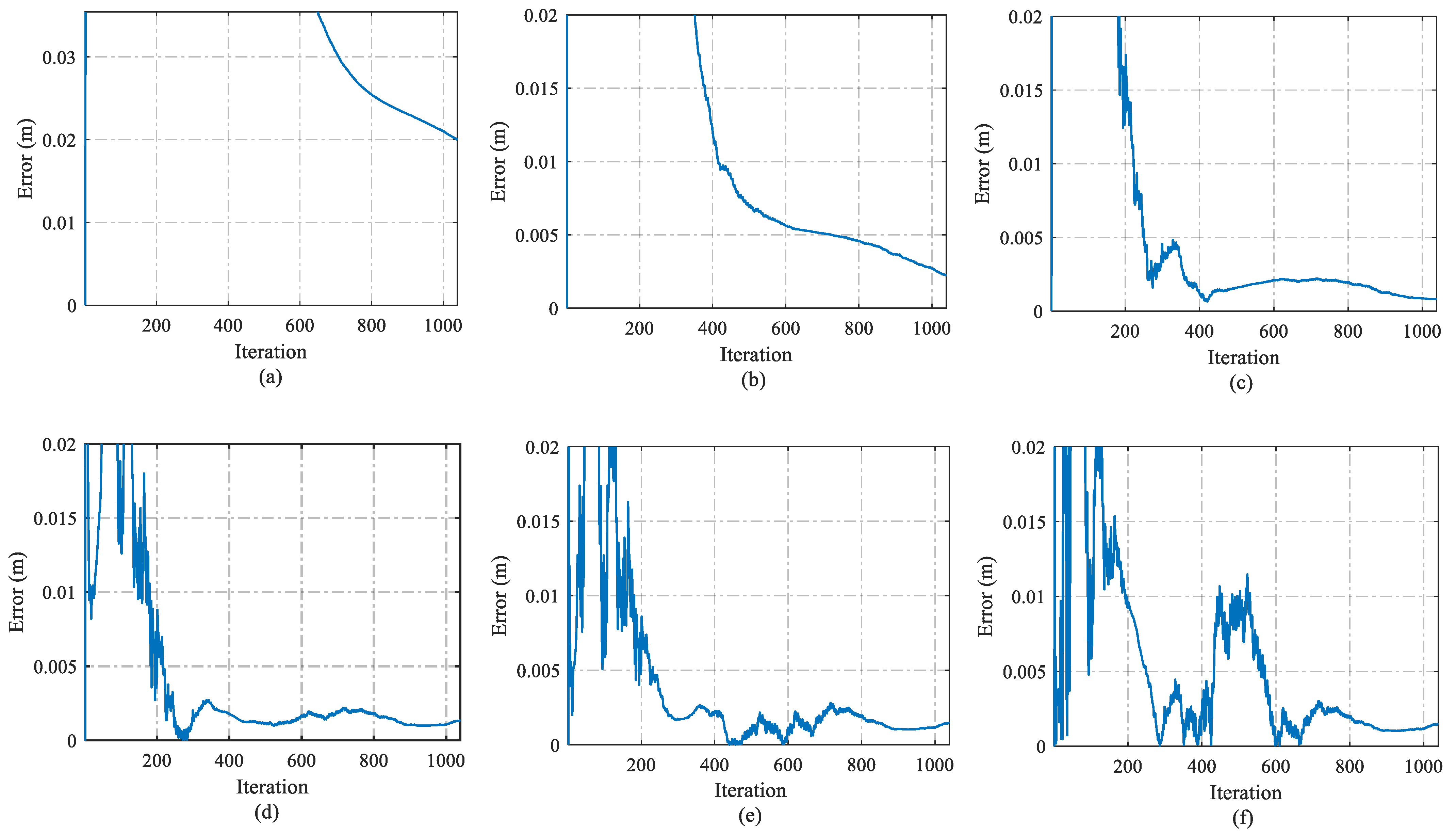
Figure 5 shows the relative range errors of the same observations but different observation noise covariance after KF. If
W is not selected properly, it is difficult to achieve good results was the filter. However, the observation noise is unknown in practice. Therefore, a method for estimating
W is proposed.
Based on the premise that the relative motion state will not change drastically, the observation value without errors should be a smooth curve. That is,
where
denotes the ideal observation without error,
A denotes the polynomial matrix, and
x denotes the coefficient vector of the polynomial. Due to the existence of the observation noise
w, the actual observation is
Therefore, the smooth observation acquired by the least square fitting is
Replace the
with the smooth observation
, and the obtained observation noise covariance
is
Letting
, (
34) can be written as
where
denotes covariance and ⊗ denotes the matrix dot product. Since the elements in
U are small,
is much smaller than
, and this conclusion is verified in the simulation.
Therefore, the smooth value
is obtained by the least square fitting to the observation value
. Using
as an estimate of
, the observation noise covariance
is calculated by (
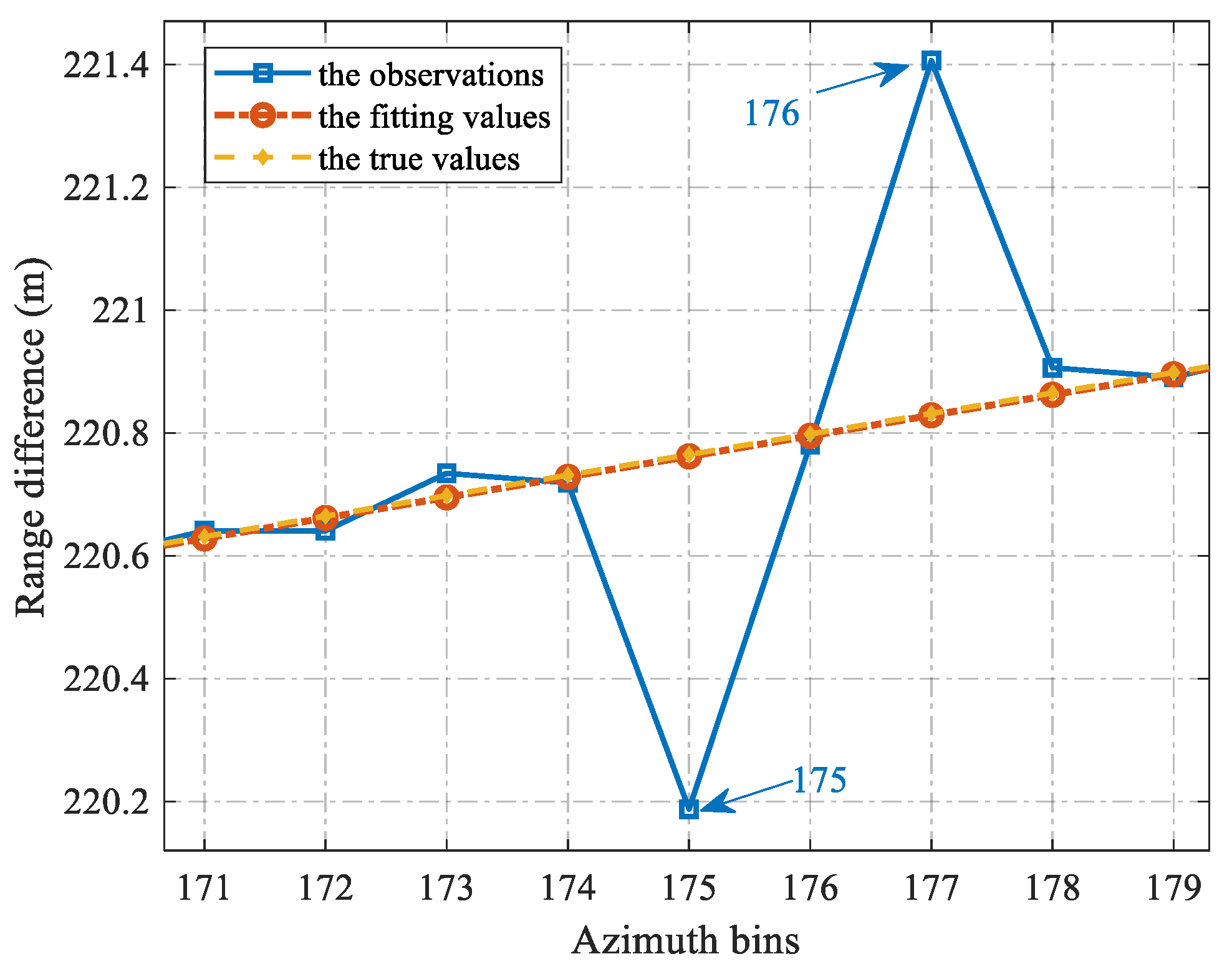
34). It should be noticed that some observations deviate significantly from the true values. If these observation values are used to calculate observation noise covariance and perform Kalman filtering, the accuracy of the final results will deteriorate. In this case, the difference between the
and
is also too large. As shown in
Figure 6, the observation values at azimuth bin 175 and azimuth bin 177 deviate seriously from the true value. The solution is to compare the size of
and the threshold. The selection of the threshold can refer to range resolution. If it is greater than the threshold, we can discard the observation value at that point and use the smooth observation value
instead.
Since the initial values of the state have not been accurately estimated, the errors of the state values at the beginning of the iteration are relatively large. By the end of the iteration, the error of relative range can converge to the order of . Therefore, the new state values of the first half can be received by weighted least squares estimation of the state values of the second half, so as to reduce the influence of excessive errors at the beginning of the iteration.
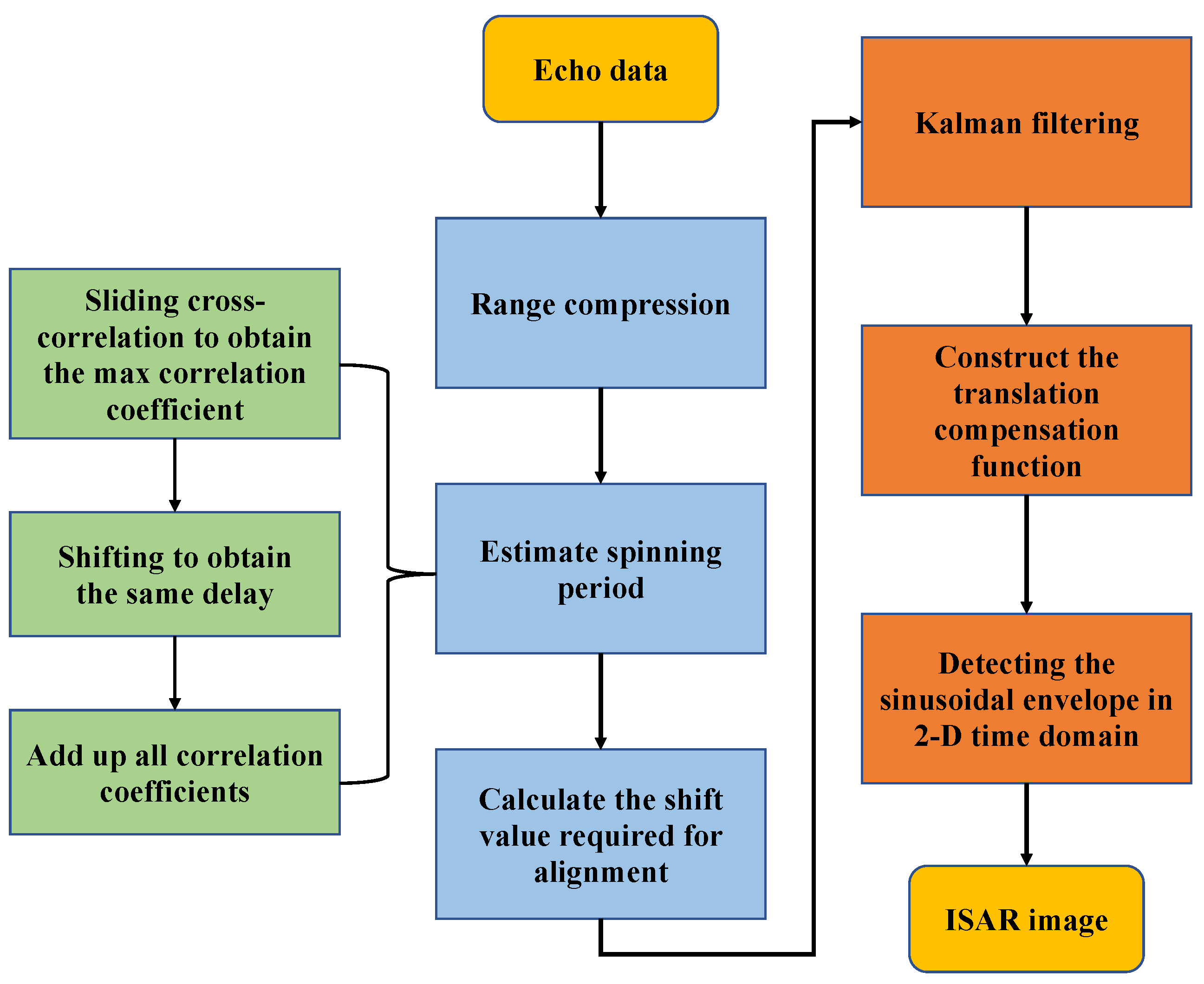
Finally, the whole flowchart of the spinning targets’ translational motion compensation and imaging method is shown in
Figure 7. In combination with the foregoing, the main steps of the translational motion compensation approach and ISAR imaging for rapidly spinning targets can be summarized as follows.
Step 1: The range compression is performed on the echo, so one obtains (
8).
Step 2: The rotation period of the target is estimated by the method shown in
Figure 3.
Step 3: The RCM of corresponding echoes in adjacent cycles is calculated by the maximum cross-correlation method.
Step 4: Kalman filtering is applied to the RCM received in step 3 to obtain the accurate slant range function between radar and target.
Step 5: The TMC function is constructed to realize accurate TMC of the echo.
Step 6: Three-dimensional imaging is performed by detecting the sinusoidal envelopes in the two-dimensional time domain.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}