
A Novel Anchor-Free Method Based on FCOS + ATSS for Ship Detection in SAR Images

Abstract
:1. Introduction
- An improved anchor-free detector based on the FCOS + ATSS network is proposed for ship detection in SAR images, which can eliminate the effect of anchors and improve detection performance.
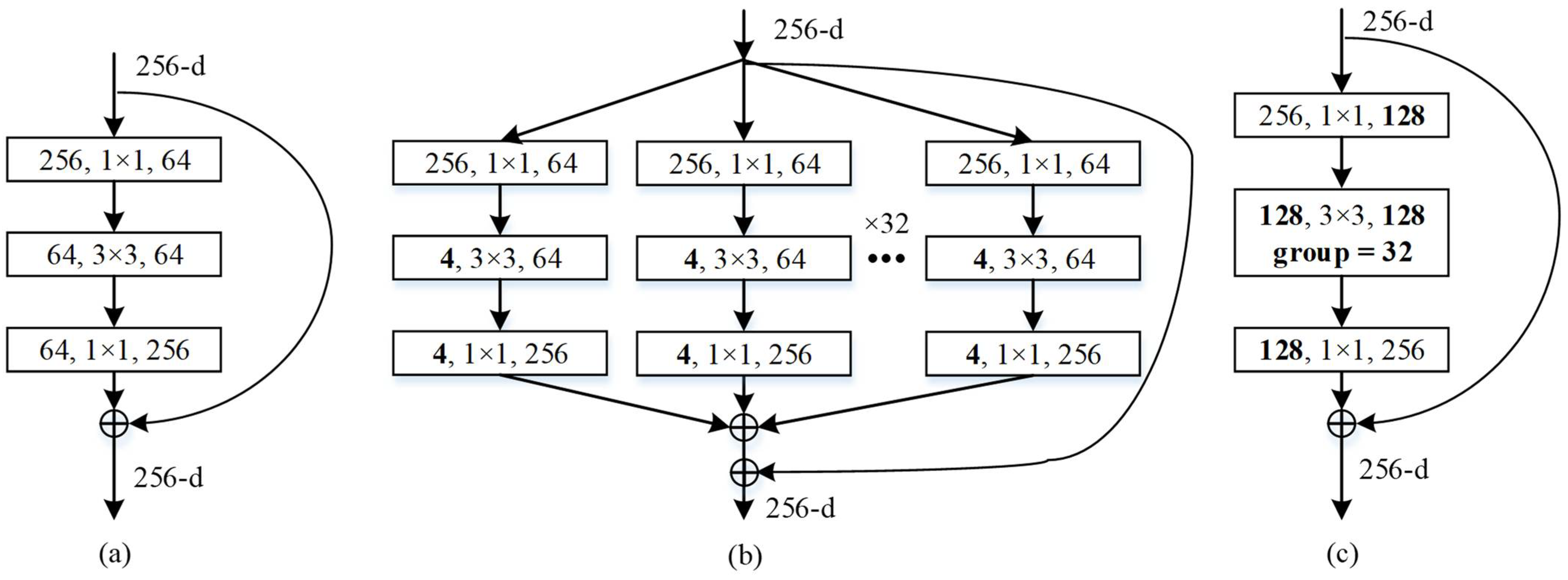
- To improve accuracy, an improved residual module (IRM) and a deformable convolution (Dconv) are embedded into the feature extraction network (FEN).
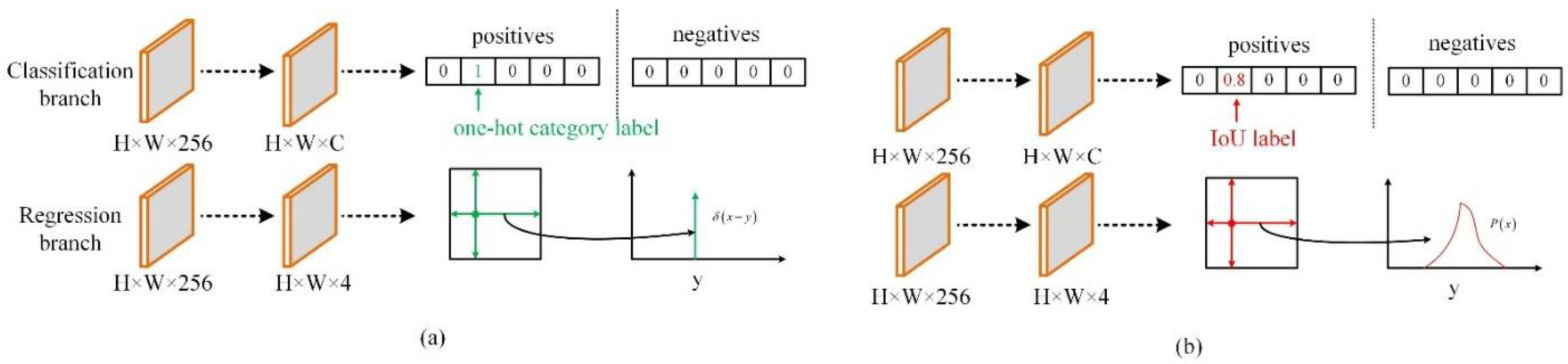
- Considering the inconsistency of classification and localization of the FCOS + ATSS network, we propose a joint representation of the classification score and localization quality.
- Considering the blurred borders caused by scattering interferences, we redesign the detection to improve positioning performance.
2. Materials and Methods
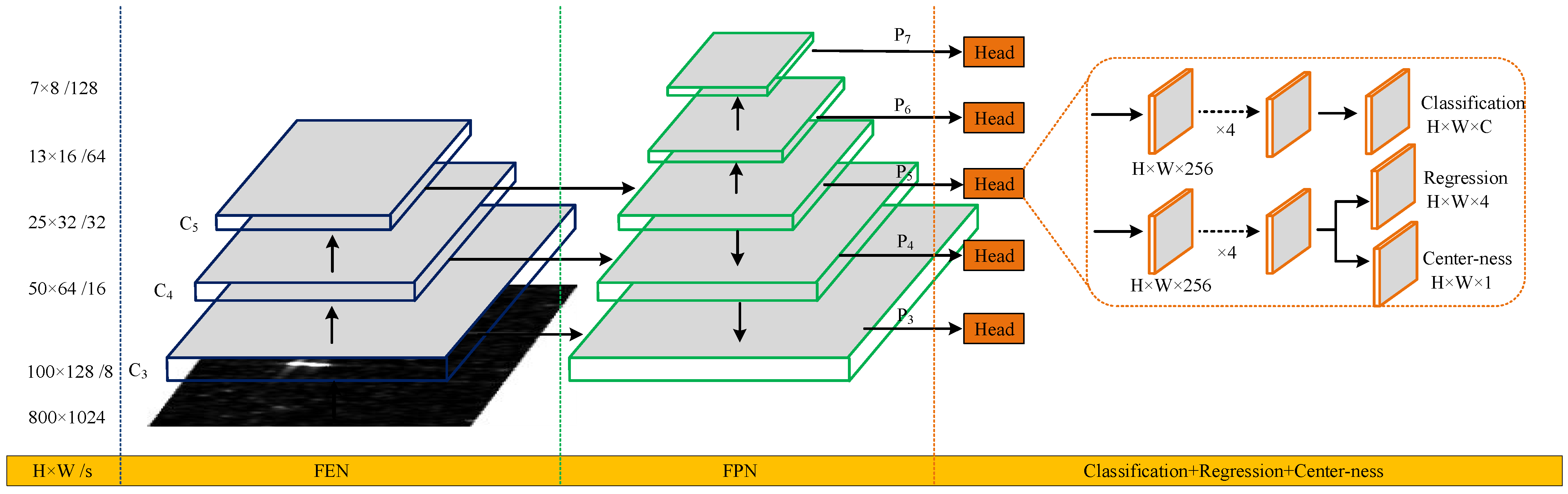
2.1. FCOS + ATSS
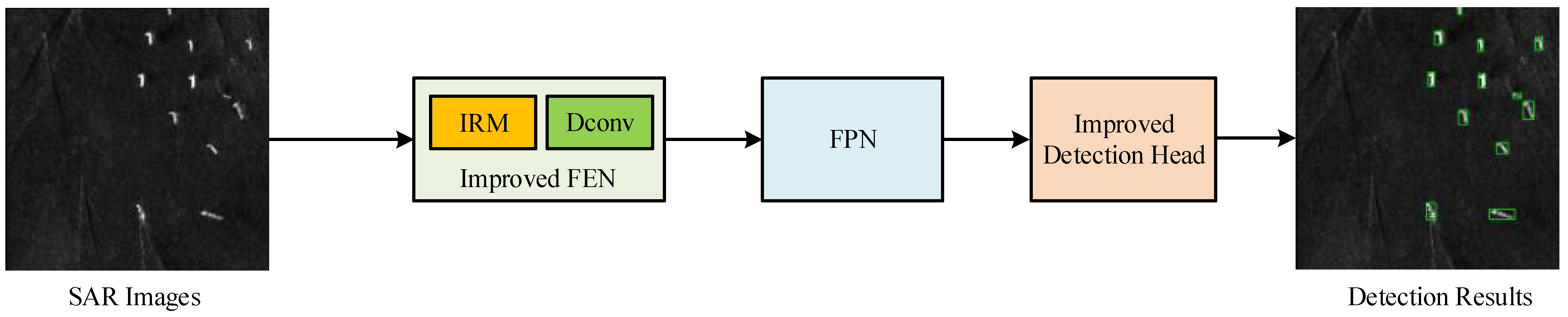
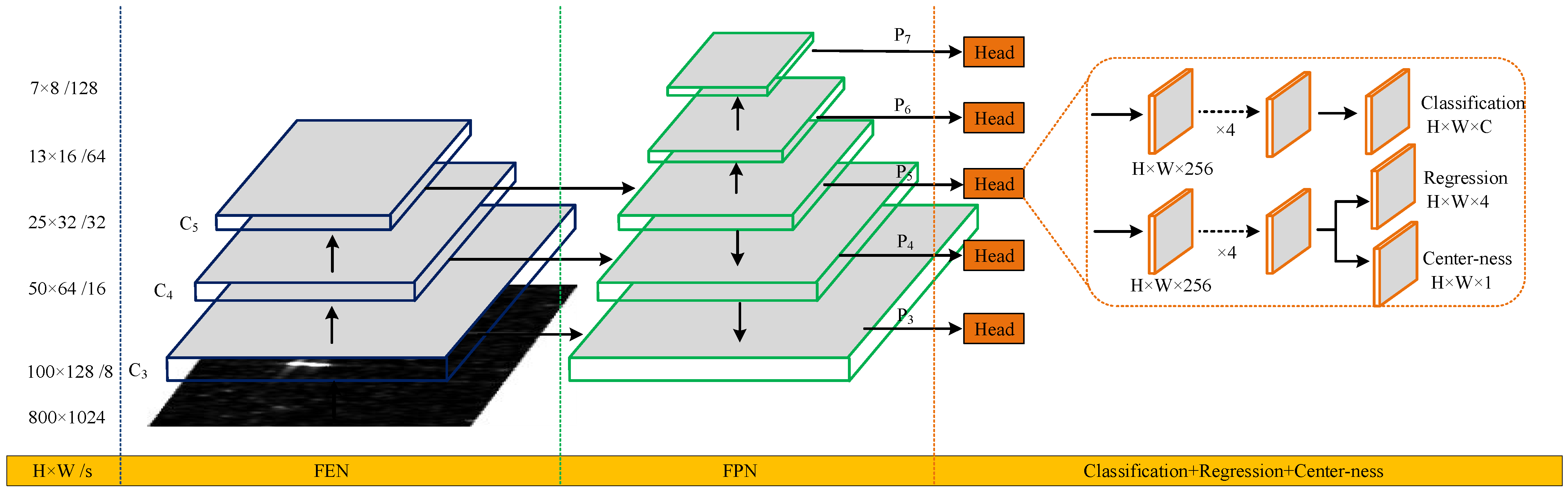
2.2. Overall Scheme of the Proposed Method
2.3. Feature Extraction Network Redesign
2.4. Detection Head Redesign
2.5. Loss Function
3. Results
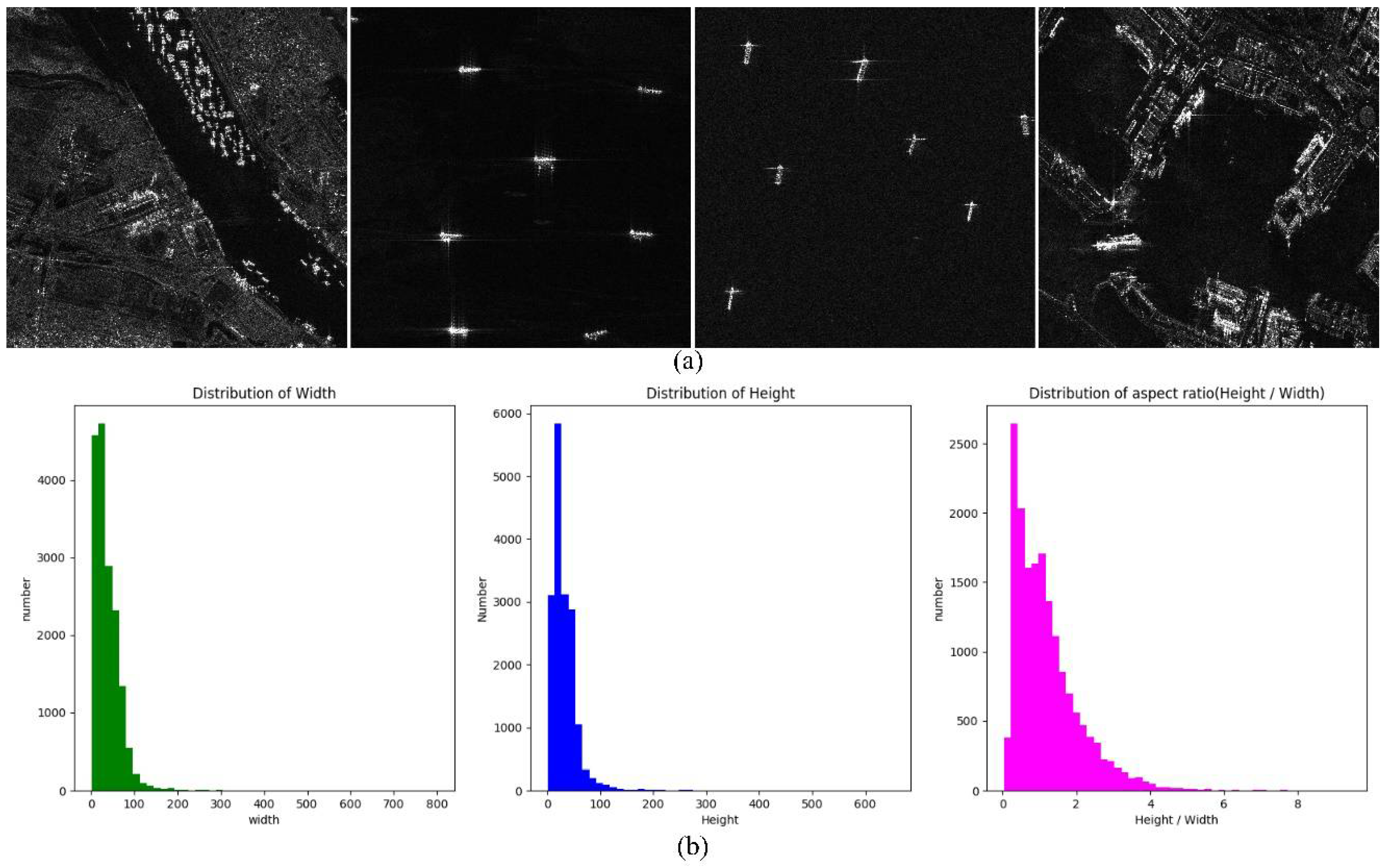
3.1. Dataset and Evaluation Metrics
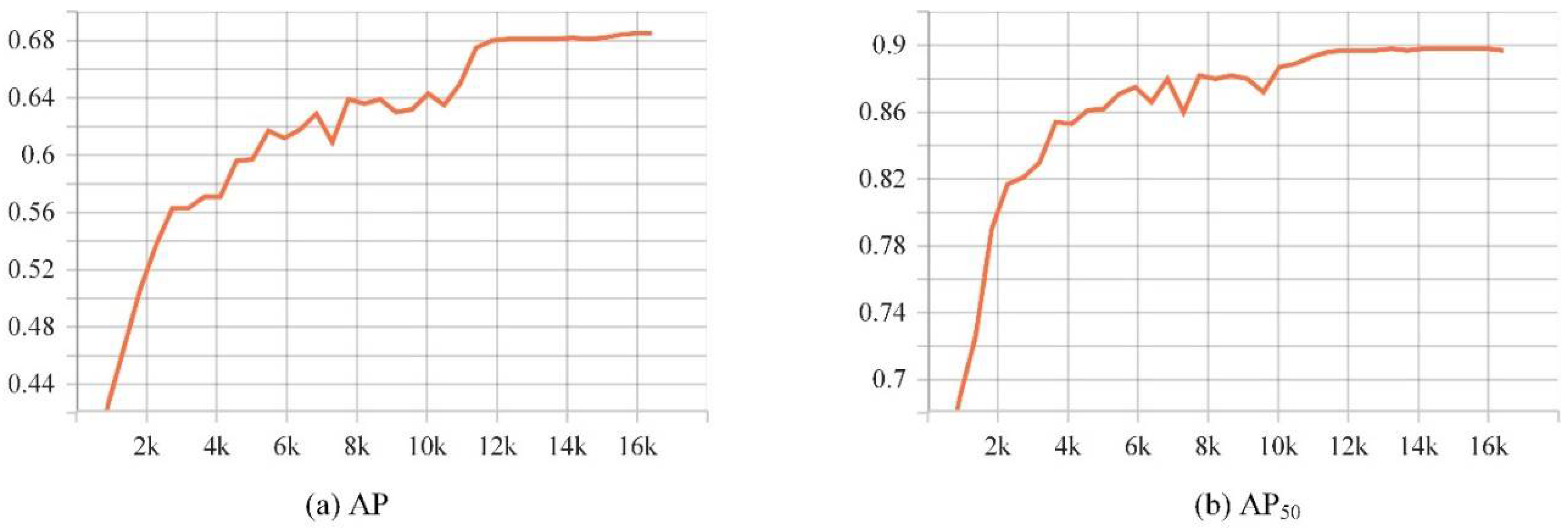
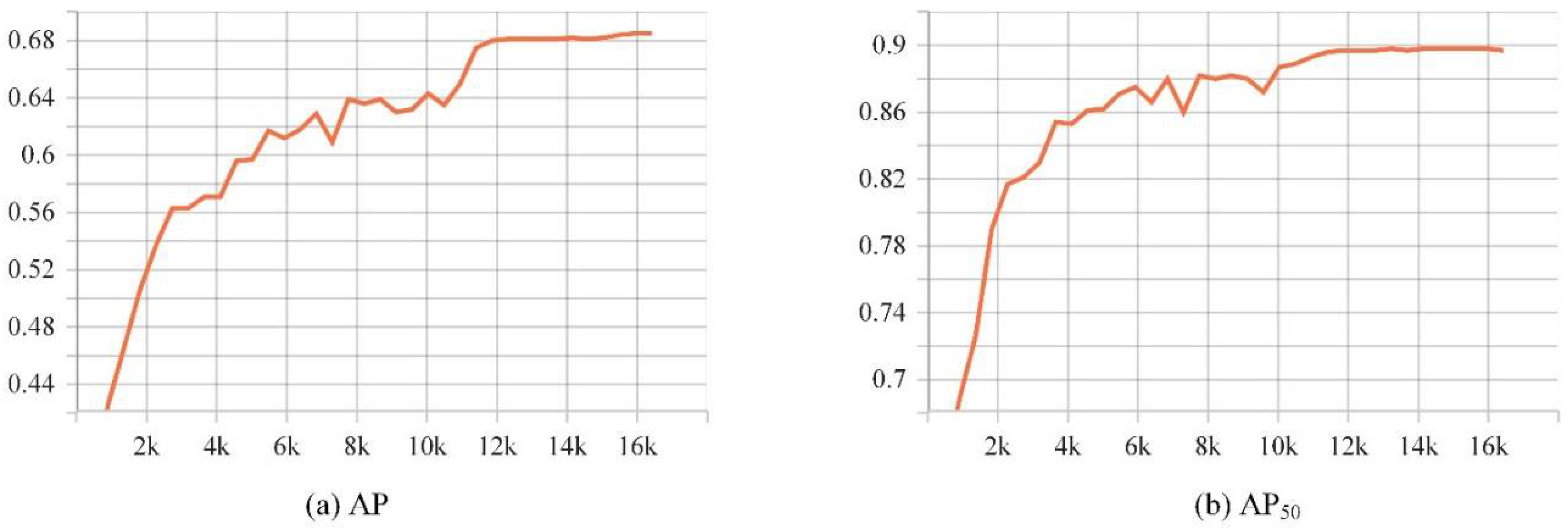
3.2. Network Training
3.3. Ablation Study
3.3.1. Analysis on FEN Redesign
3.3.2. Analysis of Detection Head Redesign
3.3.3. Analysis on FEN Redesign and Detection Head Redesign
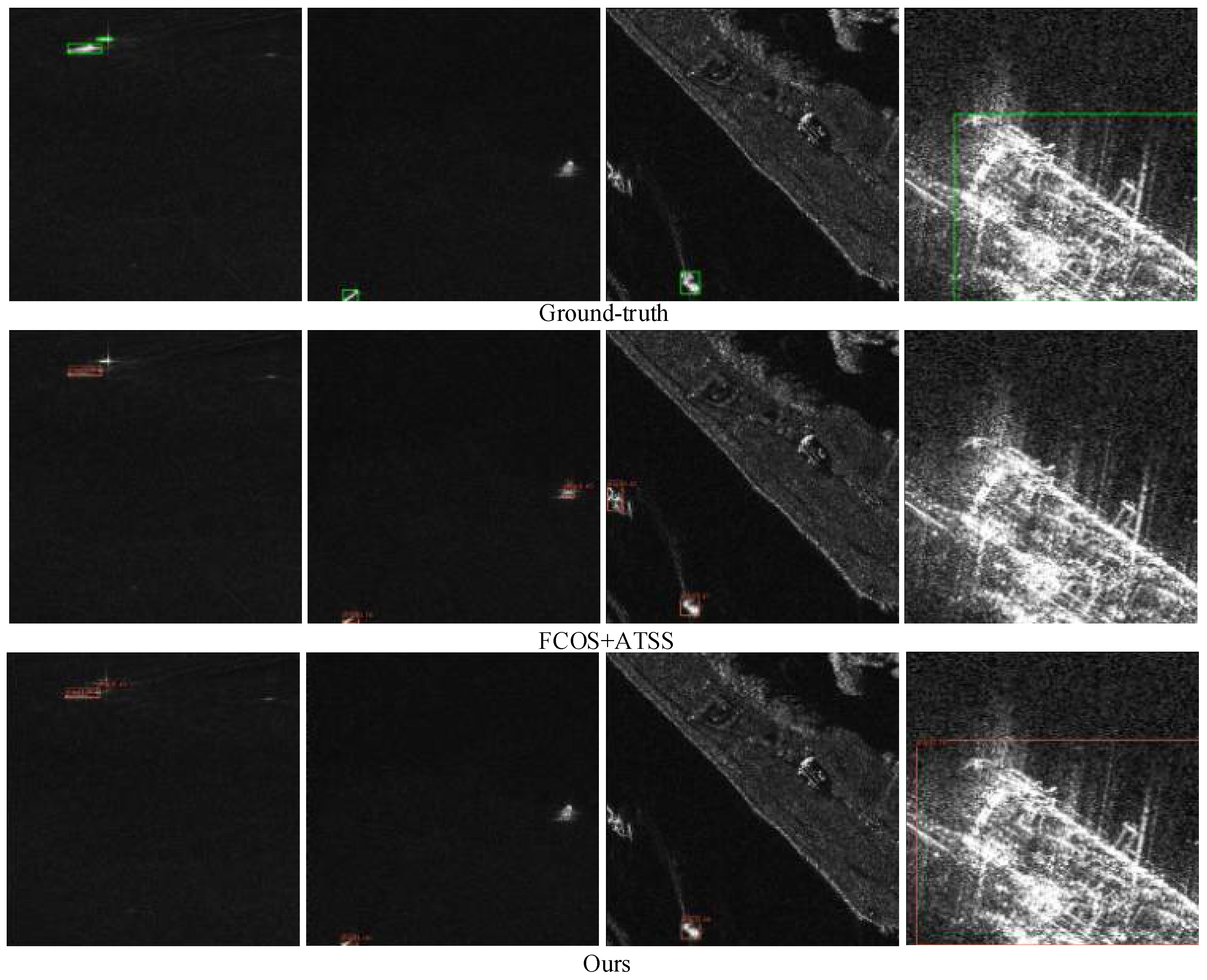
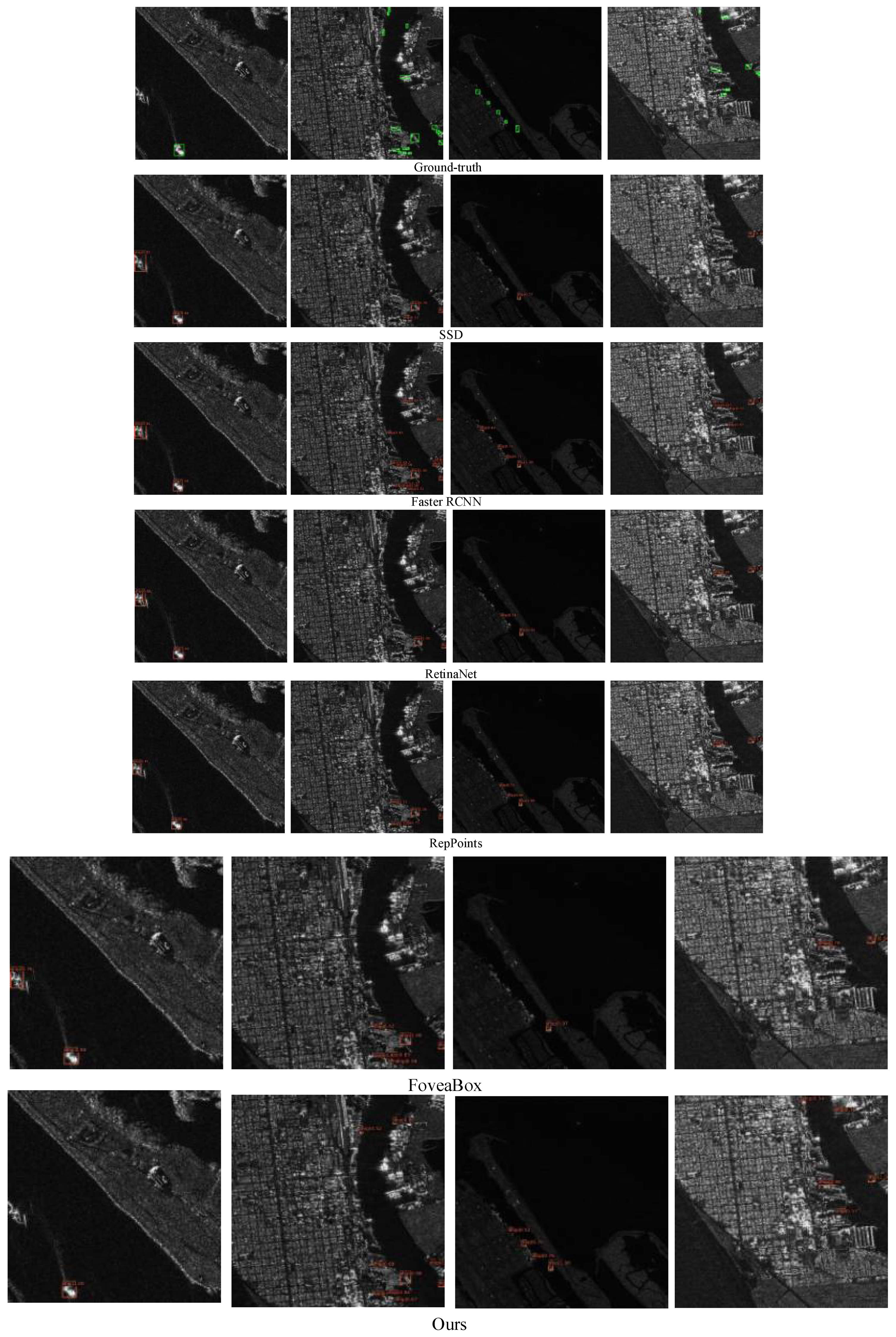
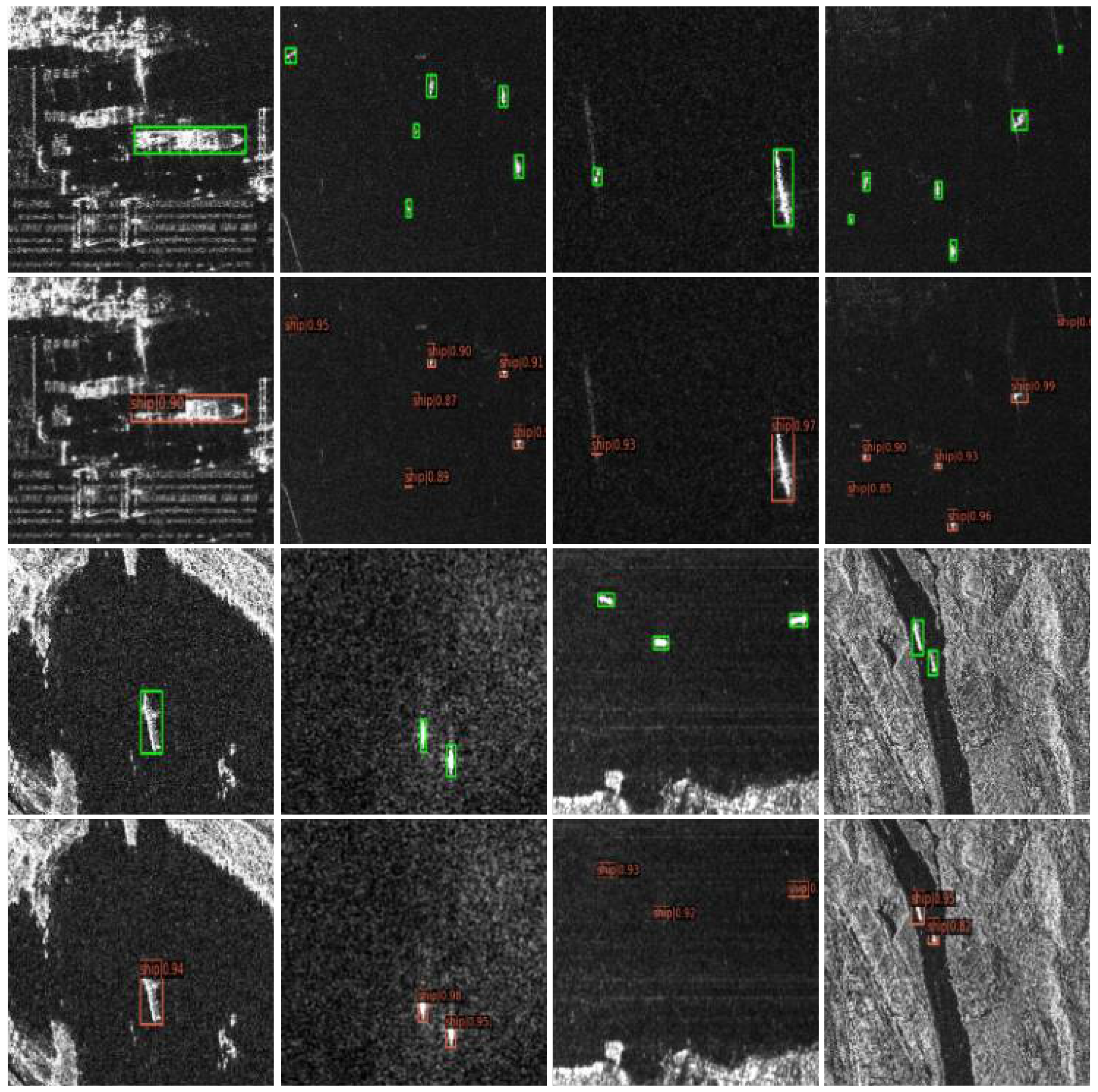
3.4. Comparison with Other Methods
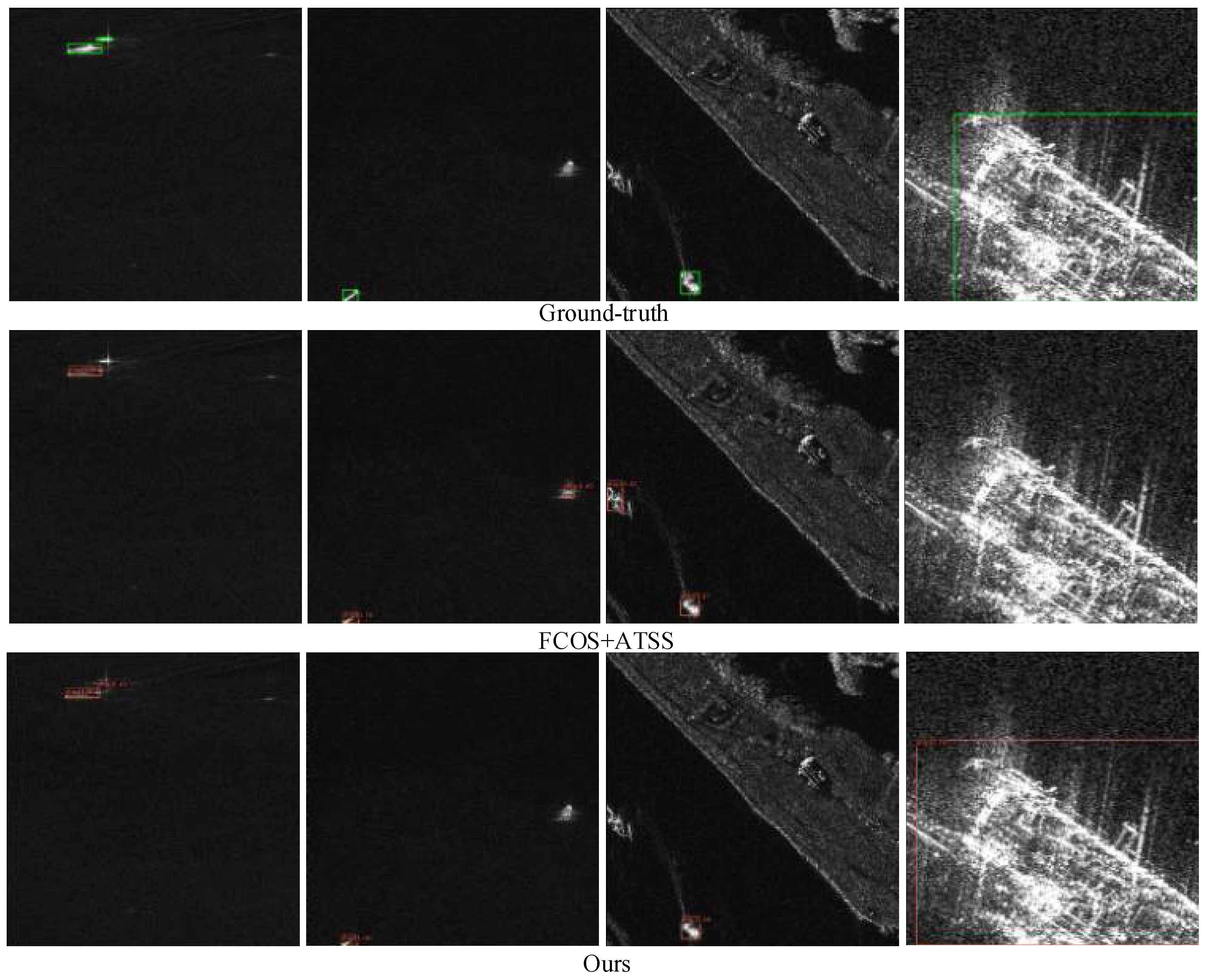
- The AP and AP50 of our method are better than those of other methods. Specifically, the AP of our method is 68.5%, which is 21.5%, 14.8%, 10.3%, 11.1%, and 10.0% higher than SSD, Faster RCNN, RetinaNet, RepPoints, and FoveaBox, respectively. The AP50 of our method is 89.8%, which is 15.4%, 13.1%, 6.8%, 4.3%, and 7.2% higher than SSD, Faster RCNN, RetinaNet, RepPoints, and FoveaBox, respectively.
- The AP and AP50 of SSD are the worst. This is because SSD uses high-resolution features to detect small ships, resulting in unsatisfactory detection results. In addition, SSD reduces the input image size to 300 × 300, which destroys the image information.
- The AP and AP50 of anchor-free methods such as RepPoints and FoveaBox are generally better than those of anchor-based methods except for RetinaNet. This shows that the anchor-free method is more suitable for SAR ship detection.
- The FPS of SSD is the highest, and that of Faster RCNN is the lowest. Although the FPS of our method is only 60.8, it already meets the real-time requirement.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yang, F.; Xu, Q.; Li, B. Ship Detection From Optical Satellite Images Based on Saliency Segmentation and Structure-LBP Feature. IEEE Geosci. Remote Sens. Lett. 2017, 14, 602–606. [Google Scholar] [CrossRef]
- Song, S.; Xu, B.; Yang, J. SAR Target Recognition via Supervised Discriminative Dictionary Learning and Sparse Representation of the SAR-HOG Feature. Remote Sens. 2016, 8, 683. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Liu, Z.; Xie, R.; Ran, L. An Improved Superpixel-Level CFAR Detection Method for Ship Targets in High-Resolution SAR Images. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 184–194. [Google Scholar] [CrossRef]
- Salembier, P.; Liesegang, S.; Lopez-Martinez, C. Ship Detection in SAR Images Based on Maxtree Representation and Graph Signal Processing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2709–2724. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.; Chen, H.; Jin, K.; Zeng, L.; Yang, J. Ship Detection With Superpixel-Level Fisher Vector in High-Resolution SAR Images. IEEE Geosci. Remote Sens. Lett. 2020, 17, 247–251. [Google Scholar] [CrossRef]
- Wang, X.; Li, G.; Zhang, X.-P.; He, Y. Ship Detection in SAR Images via Local Contrast of Fisher Vectors. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6467–6479. [Google Scholar] [CrossRef]
- Pappas, O.; Achim, A.; Bull, D. Superpixel-Level CFAR Detectors for Ship Detection in SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1397–1401. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wang, M.; Yang, S.; Jiao, L. New Hierarchical Saliency Filtering for Fast Ship Detection in High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 351–362. [Google Scholar] [CrossRef]
- He, J.; Wang, Y.; Liu, H.; Wang, N.; Wang, J. A Novel Automatic PolSAR Ship Detection Method Based on Superpixel-Level Local Information Measurement. IEEE Geosci. Remote Sens. Lett. 2018, 15, 384–388. [Google Scholar] [CrossRef]
- Suganthi, S.T.; Vinayagam, A.; Veerasamy, V.; Deepa, A.; Abouhawwash, M.; Thirumeni, M. Detection and classification of multiple power quality disturbances in Microgrid network using probabilistic based intelligent classifier. Sustain. Energy Technol. Assess. 2021, 47, 101470. [Google Scholar] [CrossRef]
- Abouhawwash, M.; Alessio, A.M. Multi-Objective Evolutionary Algorithm for PET Image Reconstruction: Concept. IEEE Trans. Med. Imaging 2021, 40, 2142–2151. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR Dataset of Ship Detection for Deep Learning under Complex Backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; Kim, D.-j.; Kang, K.-m. Automated Procurement of Training Data for Machine Learning Algorithm on Ship Detection Using AIS Information. Remote Sens. 2020, 12, 1443. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A High-Resolution SAR Images Dataset for Ship Detection and Instance Segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X.; Zhan, X.; Shi, J.; Wei, S.; Pan, D.; Li, J.; Su, H.; Zhou, Y.; et al. LS-SSDD-v1.0: A Deep Learning Dataset Dedicated to Small Ship Detection from Large-Scale Sentinel-1 SAR Images. Remote Sens. 2020, 12, 2997. [Google Scholar] [CrossRef]
- Li, J.; Qu, C.; Shao, J. Ship detection in SAR images based on an improved faster R-CNN. In Proceedings of the 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Beijing, China, 13–14 November 2017; pp. 1–6. [Google Scholar]
- Cui, Z.; Li, Q.; Cao, Z.; Liu, N. Dense Attention Pyramid Networks for Multi-Scale Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8983–8997. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, L.; Xiong, B.; Kuang, G. Attention Receptive Pyramid Network for Ship Detection in SAR Images. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 2738–2756. [Google Scholar] [CrossRef]
- Hong, Z.; Yang, T.; Tong, X.; Zhang, Y.; Jiang, S.; Zhou, R.; Han, Y.; Wang, J.; Yang, S.; Liu, S. Multi-Scale Ship Detection From SAR and Optical Imagery Via A More Accurate YOLOv3. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 6083–6101. [Google Scholar] [CrossRef]
- Chen, C.; He, C.; Hu, C.; Pei, H.; Jiao, L. MSARN: A Deep Neural Network Based on an Adaptive Recalibration Mechanism for Multiscale and Arbitrary-Oriented SAR Ship Detection. IEEE Access 2019, 7, 159262–159283. [Google Scholar] [CrossRef]
- Jin, K.; Chen, Y.; Xu, B.; Yin, J.; Wang, X.; Yang, J. A Patch-to-Pixel Convolutional Neural Network for Small Ship Detection With PolSAR Images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6623–6638. [Google Scholar] [CrossRef]
- Guo, H.; Yang, X.; Wang, N.; Gao, X. A CenterNet++ model for ship detection in SAR images. Pattern Recognit. 2021, 112, 107787. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. High-Speed Ship Detection in SAR Images Based on a Grid Convolutional Neural Network. Remote Sens. 2019, 11, 1206. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, S.; Wang, W.-Q. A Lightweight Faster R-CNN for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J. Learning Deep Ship Detector in SAR Images From Scratch. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4021–4039. [Google Scholar] [CrossRef]
- Zhang, K.; Wu, Y.; Wang, J.; Wang, Y.; Wang, Q. Semantic Context-Aware Network for Multiscale Object Detection in Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Gao, S.; Liu, J.M.; Miao, Y.H.; He, Z.J. A High-Effective Implementation of Ship Detector for SAR Images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, S.; Hu, H.; Wang, L.; Lin, S. RepPoints: Point Set Representation for Object Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 29 October–1 November 2019; pp. 9656–9665. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Zhou, X.; Wang, D.; Krahenbuhl, P. Objects as Points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the Gap Between Anchor-Based and Anchor-Free Detection via Adaptive Training Sample Selection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), ATSS, Seattle, WA, USA, 13–19 June 2020; pp. 9756–9765. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: A Simple and Strong Anchor-free Object Detector. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 1922–1933. [Google Scholar] [CrossRef]
- Kong, T.; Sun, F.; Liu, H.; Jiang, Y.; Li, L.; Shi, J. FoveaBox: Beyound Anchor-Based Object Detection. IEEE Trans. Image Process. 2020, 29, 7389–7398. [Google Scholar] [CrossRef]
- Zhu, C.; He, Y.; Savvides, M. Feature Selective Anchor-Free Module for Single-Shot Object Detection. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–19 June 2019; pp. 840–849. [Google Scholar]
- Cui, Z.; Wang, X.; Liu, N.; Cao, Z.; Yang, J. Ship Detection in Large-Scale SAR Images Via Spatial Shuffle-Group Enhance Attention. IEEE Trans. Geosci. Remote Sens. 2021, 59, 379–391. [Google Scholar] [CrossRef]
- Fu, J.; Sun, X.; Wang, Z.; Fu, K. An Anchor-Free Method Based on Feature Balancing and Refinement Network for Multiscale Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1331–1344. [Google Scholar] [CrossRef]
- Sun, Z.; Dai, M.; Leng, X.; Lei, Y.; Xiong, B.; Ji, K.; Kuang, G. An Anchor-Free Detection Method for Ship Targets in High-Resolution SAR Images. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 7799–7816. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Zhu, X.; Hu, H.; Lin, S.; Dai, J. Deformable ConvNets V2: More Deformable, Better Results. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 9300–9308. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | AP (%) | AP50 (%) | FPS |
|---|---|---|---|
| baseline | 60.2 | 85.1 | 73.9 |
| baseline + S1 | 65.0 | 88.8 | 61.0 |
| baseline + S2 | 65.7 | 88.4 | 73.7 |
| baseline + S1 + S2 (Ours) | 68.5 | 89.8 | 60.8 |
| Method | AP (%) | AP50 (%) | FPS |
|---|---|---|---|
| SSD | 47.0 | 74.4 | 101.4 |
| Faster RCNN | 53.7 | 76.7 | 23.3 |
| RetinaNet | 58.2 | 83.0 | 68.8 |
| RepPoints | 57.4 | 85.5 | 66.9 |
| FoveaBox | 58.5 | 82.6 | 67.8 |
| Ours | 68.5 | 89.8 | 60.8 |
| Method | AP (%) | FPS |
|---|---|---|
| SSD | 92.0 | 21.4 |
| Faster RCNN | 93.9 | 12.6 |
| RetinaNet | 96.3 | 20.3 |
| RepPoints | 96.5 | 19.7 |
| FoveaBox | 95.6 | 20.0 |
| Ours | 98.4 | 19.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, M.; Hu, G.; Li, S.; Zhou, H.; Wang, S.; Feng, Z. A Novel Anchor-Free Method Based on FCOS + ATSS for Ship Detection in SAR Images. Remote Sens. 2022, 14, 2034. https://doi.org/10.3390/rs14092034
Zhu M, Hu G, Li S, Zhou H, Wang S, Feng Z. A Novel Anchor-Free Method Based on FCOS + ATSS for Ship Detection in SAR Images. Remote Sensing. 2022; 14(9):2034. https://doi.org/10.3390/rs14092034
Chicago/Turabian StyleZhu, Mingming, Guoping Hu, Shuai Li, Hao Zhou, Shiqiang Wang, and Ziang Feng. 2022. "A Novel Anchor-Free Method Based on FCOS + ATSS for Ship Detection in SAR Images" Remote Sensing 14, no. 9: 2034. https://doi.org/10.3390/rs14092034
APA StyleZhu, M., Hu, G., Li, S., Zhou, H., Wang, S., & Feng, Z. (2022). A Novel Anchor-Free Method Based on FCOS + ATSS for Ship Detection in SAR Images. Remote Sensing, 14(9), 2034. https://doi.org/10.3390/rs14092034