
An Efficient Backprojection Algorithm Based on Wavenumber-Domain Spectral Splicing for Monostatic and Bistatic SAR Configurations


Abstract
:1. Introduction
2. Radar Echo Model
3. Fast Backprojection Based on Wavenumber-Domain Spectral Splicing
3.1. Principle of WFBP
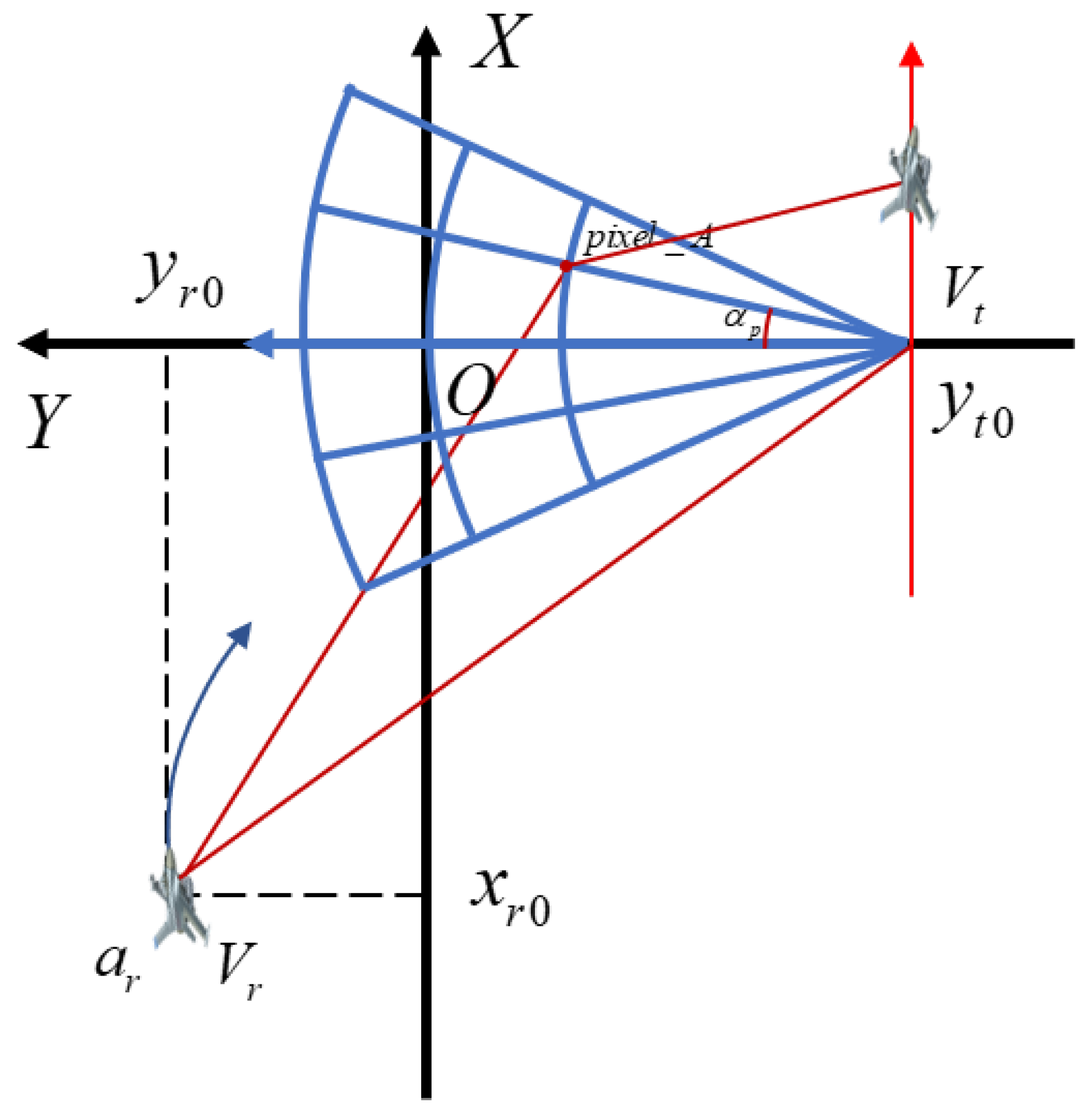
3.2. Application in Bistatic Forward-Looking SAR
- The motion of the transmitting station and the receiving station in the slow time t, that is, the movement of the transmitting station and the receiving station in each pulse repetition period.
- After the transmitting station transmits the pulse, the displacement generated before receiving the pulse because of the too-fast speed of the receiving station.
- The movement of the receiving station in the fast time , that is, the movement of the receiving station in the pulse propagation period.
3.3. Computational Efficiency Analysis
- Establish sub-aperture coordinate system; this requires times complex matrix multiplication.
- (a)
- Backprojection on the sub-aperture polar grid; this requires times complex matrix multiplication.
- (b)
- Polar angle interpolation of sub-aperture coordinate system; this requires times complex matrix multiplication.
- Projection to Cartesian coordinate system after sub-aperture coherent overlay; this requires times complex matrix multiplication.
4. Simulation Results
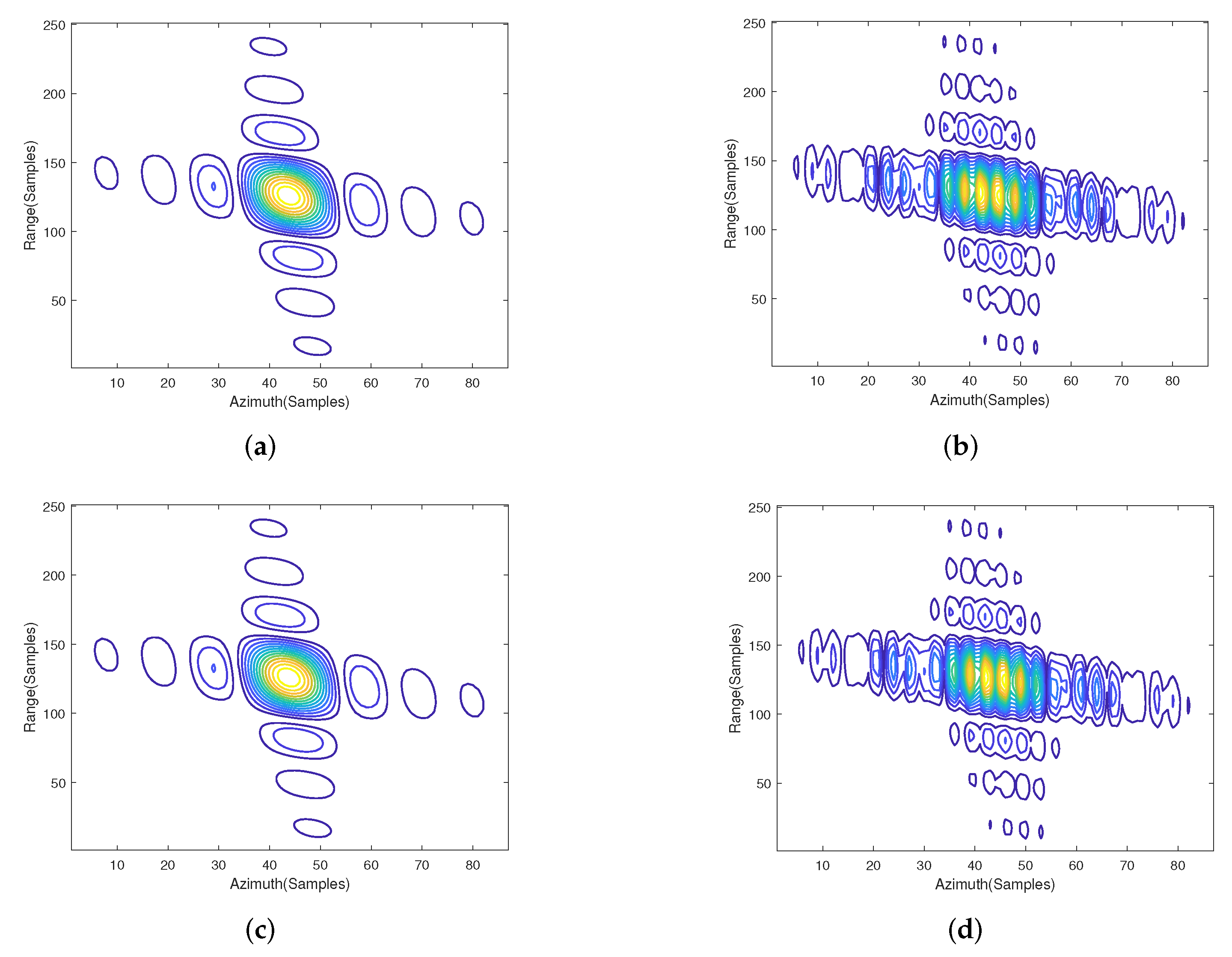
4.1. Simulation Results of Monostatic SAR
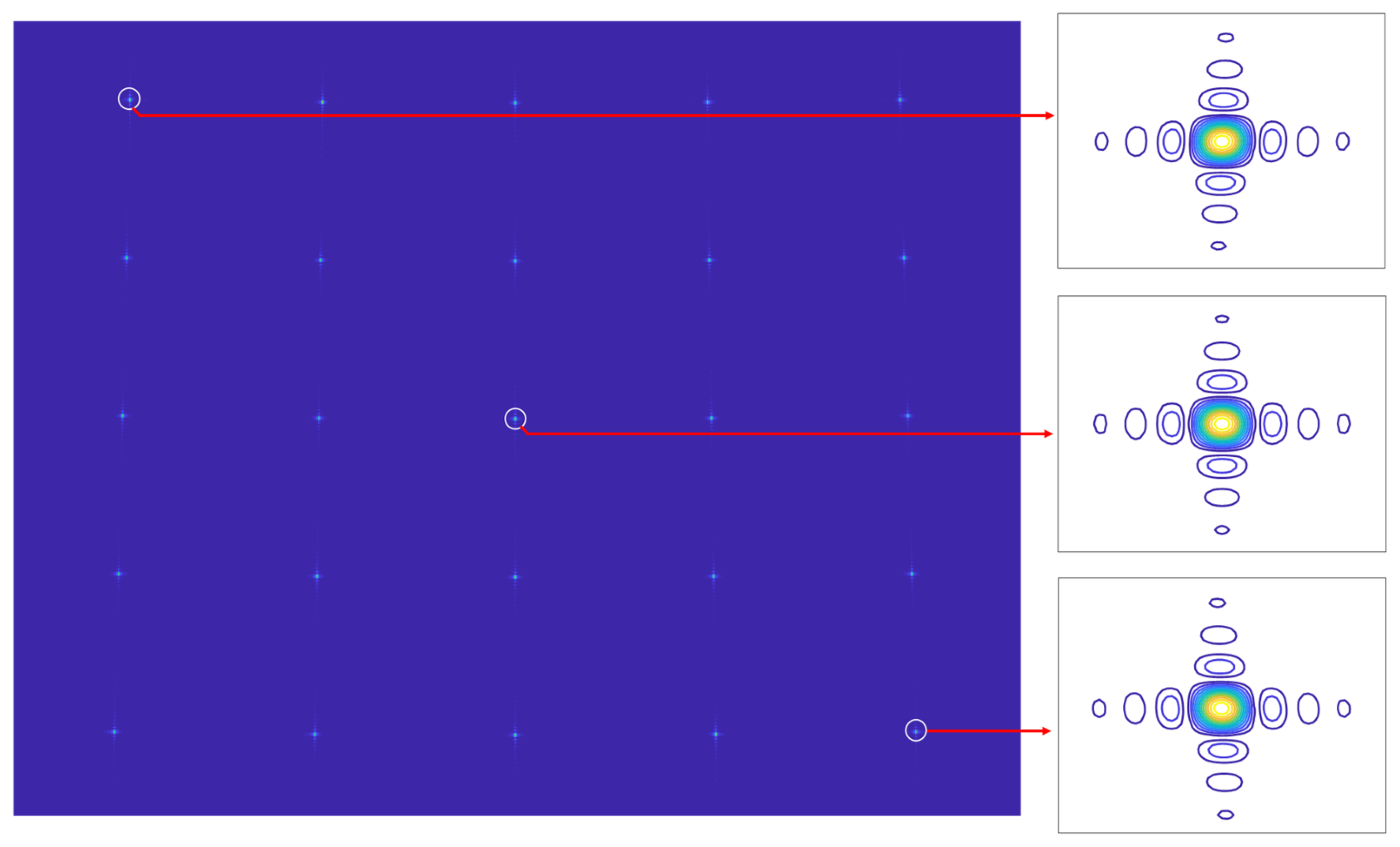
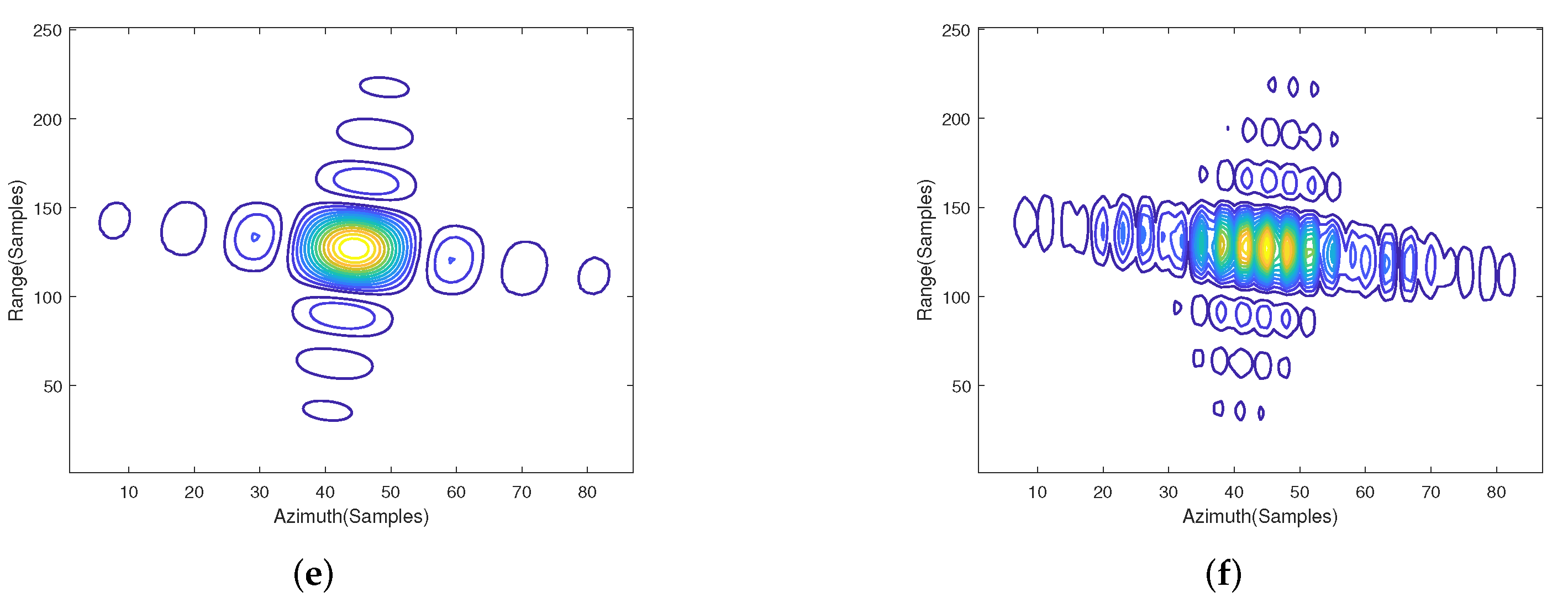
4.2. Simulation Results of Bistatic Forward-Looking SAR
4.3. Imaging Results of Real Bistatic Forward-Looking SAR Experiment Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Huang, Y.; Yang, H.; Wu, J.; Li, W.; Li, Z.; Yang, X. A first experiment of airborne bistatic forward-looking SAR—Preliminary results. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4202–4204. [Google Scholar] [CrossRef]
- Sun, Z.; Yen, G.G.; Wu, J.; Ren, H.; An, H.; Yang, J. Mission Planning for Energy-Efficient Passive UAV Radar Imaging System Based on Substage Division Collaborative Search. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Cui, C.; Dong, X.; Chen, Z.; Hu, C.; Tian, W. A Long-Time Coherent Integration STAP for GEO Spaceborne-Airborne Bistatic SAR. Remote Sens. 2022, 14, 593. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Li, Z.; An, H.; He, X. Geosynchronous Spaceborne-Airborne Bistatic SAR Data Focusing Using a Novel Range Model Based on One-Stationary Equivalence. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1214–1230. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Pei, J.; Li, Z.; Huang, Y.; Yang, J. Inclined Geosynchronous Spaceborne–Airborne Bistatic SAR: Performance Analysis and Mission Design. IEEE Trans. Geosci. Remote Sens. 2016, 54, 343–357. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, W.; Zheng, M.; Zhao, L.; Zhou, Z.X. Phase Mismatch Calibration for Dual-Channel Sliding Spotlight SAR-GMTI. Remote Sens. 2022, 14, 617. [Google Scholar] [CrossRef]
- Cui, Z.; Quan, H.; Cao, Z.; Xu, S.; Wu, J. SAR Target CFAR Detection Via GPU Parallel Operation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4884–4894. [Google Scholar] [CrossRef]
- Li, Z.; Huang, C.; Sun, Z.; An, H.; Wu, J.; Yang, J. BeiDou-Based Passive Multistatic Radar Maritime Moving Target Detection Technique via Space-Time Hybrid Integration Processing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5802313. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, Y.; Wang, Y.; Bai, Y.; Zhang, Y.; Li, X. Numerical Simulation of SAR Image for Sea Surface. Remote Sens. 2022, 14, 439. [Google Scholar] [CrossRef]
- Cruz, H.; Véstias, M.; Monteiro, J.; Neto, H.; Duarte, R.P. A Review of Synthetic-Aperture Radar Image Formation Algorithms and Implementations: A Computational Perspective. Remote Sens. 2022, 14, 1258. [Google Scholar] [CrossRef]
- Guo, Z.; Fu, Z.; Chang, J.; Wu, L.; Li, N. A Novel High-Squint Spotlight SAR Raw Data Simulation Scheme in 2-D Frequency Domain. Remote Sens. 2022, 14, 651. [Google Scholar] [CrossRef]
- Jin, M.Y.; Wu, C. A SAR correlation algorithm which accommodates large-range migration. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 592–597. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X.; Yang, Q.; Xiao, Y.; An, H.; Yang, H.; Wu, J.; Yang, J. Hybrid SAR-ISAR Image Formation via Joint FrFT-WVD Processing for BFSAR Ship Target High-Resolution Imaging. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5215713. [Google Scholar] [CrossRef]
- Wu, S.; Xu, Z.; Wang, F.; Yang, D.; Guo, G. An Improved Back-Projection Algorithm for GNSS-R BSAR Imaging Based on CPU and GPU Platform. Remote Sens. 2021, 13, 2107. [Google Scholar] [CrossRef]
- Yegulalp, A. Fast backprojection algorithm for synthetic aperture radar. In Proceedings of the 1999 IEEE Radar Conference. Radar into the Next Millennium (Cat. No.99CH36249), Waltham, MA, USA, 22 April 1999; pp. 60–65. [Google Scholar] [CrossRef]
- Basu, S.; Bresler, Y. Error analysis and performance optimization of fast hierarchical backprojection algorithms. IEEE Trans. Image Process. Publ. IEEE Signal Process. Soc. 2001, 10, 1103–1117. [Google Scholar] [CrossRef]
- Ulander, L.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Li, H.; Qiao, Z.; Xu, Z. A Fast BP Algorithm with Wavenumber Spectrum Fusion for High-Resolution Spotlight SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1460–1464. [Google Scholar] [CrossRef]
- Góes, J.A.; Castro, V.; Sant’Anna Bins, L.; Hernandez-Figueroa, H.E. Spiral SAR Imaging with Fast Factorized Back-Projection: A Phase Error Analysis. Sensors 2021, 21, 5099. [Google Scholar] [CrossRef]
- Sun, Z.; Ren, H.; Yen, G.G.; Chen, T.; Wu, J.; An, H.; Yang, J. An Evolutionary Algorithm with Constraint Relaxation Strategy for Highly Constrained Multiobjective Optimization. IEEE Trans. Cybern. 2022, 1–15. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Liu, Z.; Yang, H.; Wu, J.; Yang, J. Bistatic Forward Looking SAR MP-DPCA Method for Space Time Extension Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6565–6579. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjögren, T.K.; Pettersson, M.I. SAR imaging in ground plane using Fast Backprojection for mono- and bistatic cases. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 184–189. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Chen, J.; Huang, Y.; Yang, J.; Fan, Y.; Pi, Y. Analysis and Improvement of a Fast Backprojection Algorithm for Stripmap Bistatic SAR Imaging. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Wijayasiri, A.; Banerjee, T.; Ranka, S.; Sahni, S.; Schmalz, M. Dynamic Data-Driven SAR Image Reconstruction Using Multiple GPUs. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4326–4338. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Prats, P.; Krieger, G.; Moreira, A. Efficient Time-Domain Image Formation with Precise Topography Accommodation for General Bistatic SAR Configurations. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2949–2966. [Google Scholar] [CrossRef] [Green Version]
- Ran, L.; Liu, Z.; Xie, R.; Zhang, L. Focusing High-Squint Synthetic Aperture Radar Data Based on Factorized Back-Projection and Precise Spectrum Fusion. Remote Sens. 2019, 11, 2885. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Yang, L.; Zhao, L.; Wang, Y.; Zhou, H.; Chen, L.; Xing, M. A New Fast Factorized Back Projection Algorithm for Bistatic Forward-Looking SAR Imaging Based on Orthogonal Elliptical Polar Coordinate. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1508–1520. [Google Scholar] [CrossRef]
- Vu, V.T.; Pettersson, M.I. Fast Backprojection Algorithms Based on Subapertures and Local Polar Coordinates for General Bistatic Airborne SAR Systems. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2706–2712. [Google Scholar] [CrossRef]
- Cardillo, G. On the use of the gradient to determine bistatic SAR resolution. In Proceedings of the International Symposium on Antennas and Propagation Society, Merging Technologies for the 90’s, Dallas, TX, USA, 7–11 May 1990; Volume 2, pp. 1032–1035. [Google Scholar] [CrossRef]
- Yang, J. (Ed.) Chapter 2—Bistatic SAR imaging theory. In Bistatic Synthetic Aperture Radar; Elsevier: Amsterdam, The Netherlands, 2022; pp. 77–137. [Google Scholar] [CrossRef]
- Gorham, L.; Majumder, U.K.; Buxa, P.; Backues, M.J.; Lindgren, A.C. Implementation and analysis of a fast backprojection algorithm. Proc. SPIE 2006, 6237, 1–8. [Google Scholar]
- Li, X.; Zhou, S.; Yang, L. A New Fast Factorized Back-Projection Algorithm with Reduced Topography Sensibility for Missile-Borne SAR Focusing with Diving Movement. Remote Sens. 2020, 12, 2616. [Google Scholar] [CrossRef]
- Zhang, H.; Tang, J.; Wang, R.; Deng, Y.; Wang, W.; Li, N. An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing. Remote Sens. 2018, 10, 140. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | |
|---|---|
| Carrier frequency (Ghz) | 10 |
| Bandwidth (MHz) | 100 |
| Height (m) | 8000 |
| Flight speed (m/s) | 200 |
| PRF | 800 |
| Synthetic aperture time (s) | 2 |
| Sampling rate (MHz) | 500 |
| Signal duration (μs) | 50 |
| Parameter | |
|---|---|
| Carrier frequency (GHz) | 5 |
| Bandwidth (MHz) | 300 |
| Height (m) | 2000 |
| Flight speed (m/s) | 100 |
| PRF | 600 |
| Synthetic aperture time (s) | 1.37 |
| Sampling rate (MHz) | 330 |
| Signal duration (μs) | 50 |
| Parameter | |
|---|---|
| Carrier frequency (GHz) | 10 |
| Bandwidth (MHz) | 100 |
| Initial position of transmitting station (m) | [10,000, 0, 10,000] |
| Initial position of receiving station (m) | [0, −5000, 5000] |
| Initial speed of transmitting station (m/s) | [0, 300, 0] |
| Initial speed of receiving station (m/s) | [0, 800, −100] |
| Terminal acceleration (m/s2) | [0, 50, −50] |
| PRF | 1200 |
| Synthetic aperture time (s) | 0.75 |
| Sampling rate (MHz) | 210 |
| Signal duration (μs) | 5 |
| Method | Focusing Quality Indexs | Azimuth Direction | Range Direction | ||||
|---|---|---|---|---|---|---|---|
| Point P1 | Point O | Point P2 | Point P1 | Point O | Point P2 | ||
| WFBP algorithm | PSLR (db) | −13.25 | −13.25 | −13.21 | −13.56 | −13.56 | −13.77 |
| ISLR (db) | −10.98 | −11.02 | −11.01 | −11.33 | −11.33 | −11.82 | |
| IRW (m) | 0.65 | 0.65 | 0.65 | 1.89 | 1.89 | 1.89 | |
| FBP algorithm | PSLR (db) | −9.17 | −9.17 | −9.20 | −13.97 | −14.09 | −14.22 |
| ISLR (db) | −6.41 | −6.40 | −6.39 | −11.95 | −11.36 | −12.01 | |
| IRW (m) | 1.24 | 1.37 | 1.29 | 1.89 | 1.82 | 1.79 | |
| Number of Sub-Apertures | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 4 | 6 | 8 | 10 | 12 | ||
| Time (s) | FBP | 1872.7 | 1603.1 | 964.5 | 615.2 | 510.9 | 465.5 | 450.3 |
| WFBP | 1872.7 | 1032.4 | 543.1 | 392.7 | 311.3 | 257.3 | 228.1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Sun, Z.; Chen, T.; Miao, Y.; Wu, J.; Yang, J. An Efficient Backprojection Algorithm Based on Wavenumber-Domain Spectral Splicing for Monostatic and Bistatic SAR Configurations. Remote Sens. 2022, 14, 1885. https://doi.org/10.3390/rs14081885
Sun H, Sun Z, Chen T, Miao Y, Wu J, Yang J. An Efficient Backprojection Algorithm Based on Wavenumber-Domain Spectral Splicing for Monostatic and Bistatic SAR Configurations. Remote Sensing. 2022; 14(8):1885. https://doi.org/10.3390/rs14081885
Chicago/Turabian StyleSun, Huarui, Zhichao Sun, Tianfu Chen, Yuxuan Miao, Junjie Wu, and Jianyu Yang. 2022. "An Efficient Backprojection Algorithm Based on Wavenumber-Domain Spectral Splicing for Monostatic and Bistatic SAR Configurations" Remote Sensing 14, no. 8: 1885. https://doi.org/10.3390/rs14081885
APA StyleSun, H., Sun, Z., Chen, T., Miao, Y., Wu, J., & Yang, J. (2022). An Efficient Backprojection Algorithm Based on Wavenumber-Domain Spectral Splicing for Monostatic and Bistatic SAR Configurations. Remote Sensing, 14(8), 1885. https://doi.org/10.3390/rs14081885