
On the Joint Exploitation of Satellite DInSAR Measurements and DBSCAN-Based Techniques for Preliminary Identification and Ranking of Critical Constructions in a Built Environment

 , ,
, ,  , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. DInSAR Technique
2.2. DBSCAN Technique
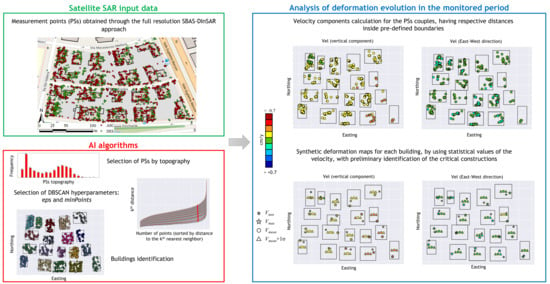
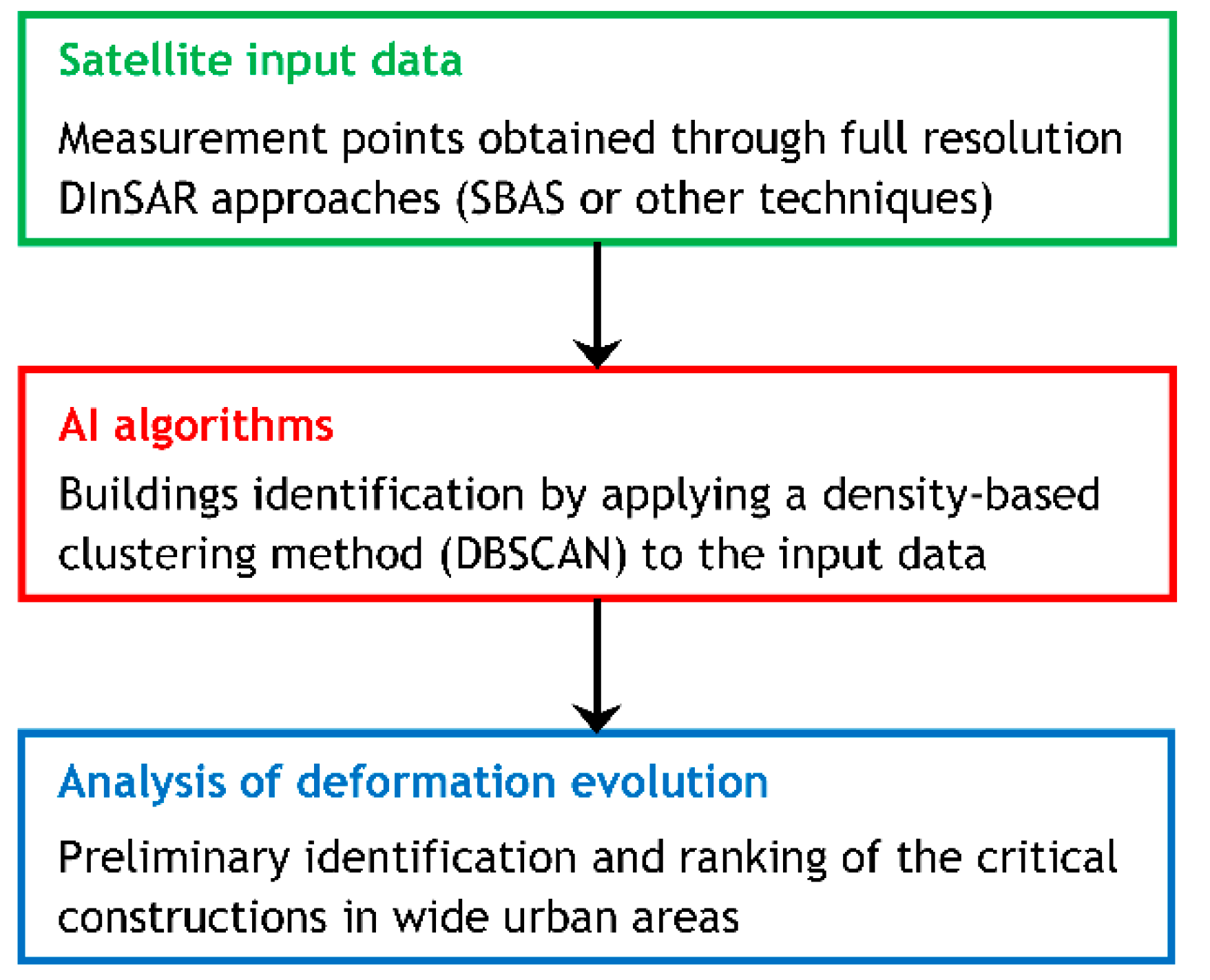
2.3. Proposed Methodology
- ➢
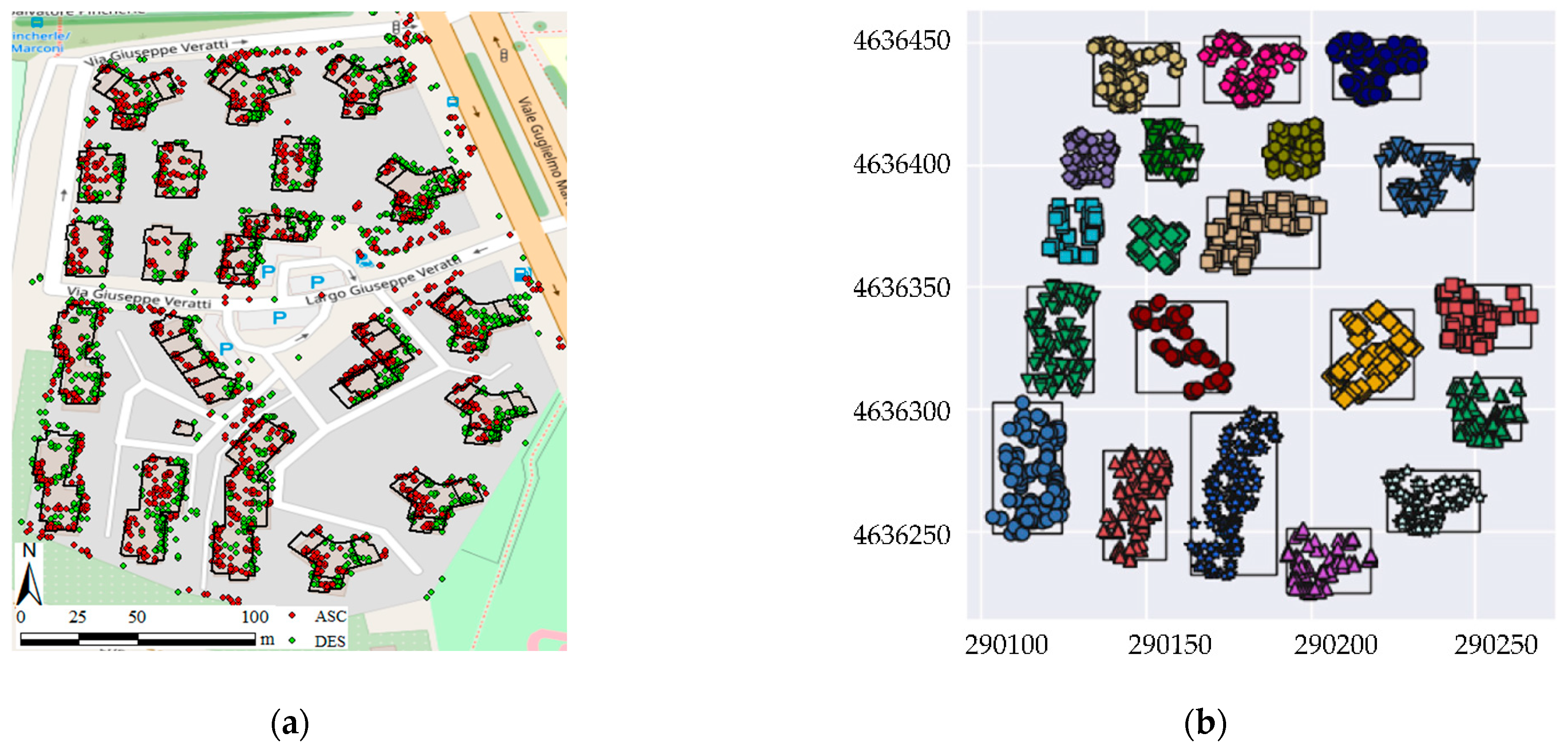
- The first one (green box) regards the acquisition and the processing of the SAR images relevant to the analyzed area, in the period of interest (in this case, CSK images in the period 2011–2019). The images are processed through a multi-temporal DInSAR technique (in this case, the well-known full resolution SBAS-DInSAR algorithm), in order to obtain spatially dense maps of coherent measurement points (referred to as PSs);
- ➢
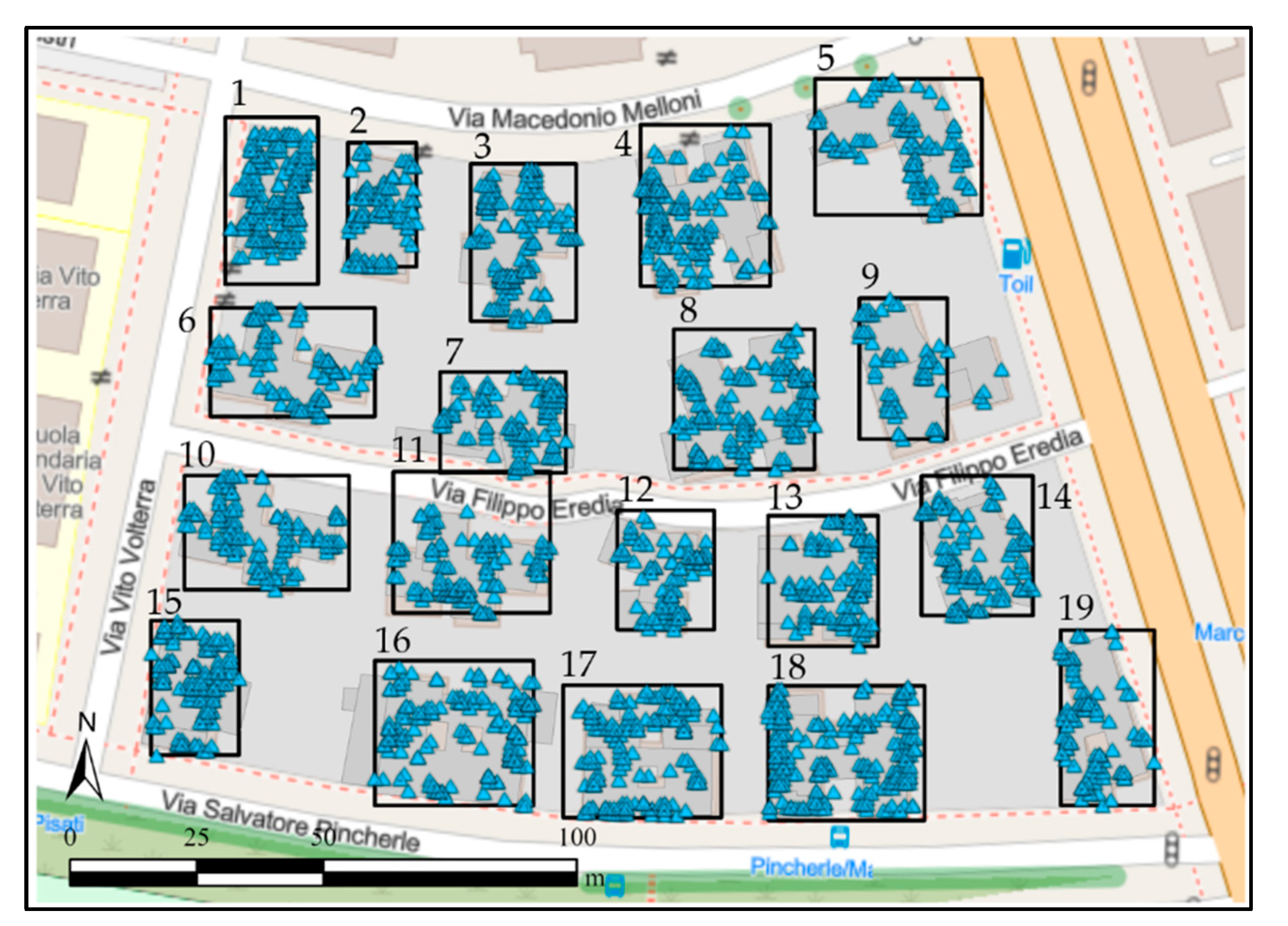
- The second one (red box) regards the clustering operation performed by using the DBSCAN algorithm. The identified clusters represent the different buildings of the investigated area;
- ➢
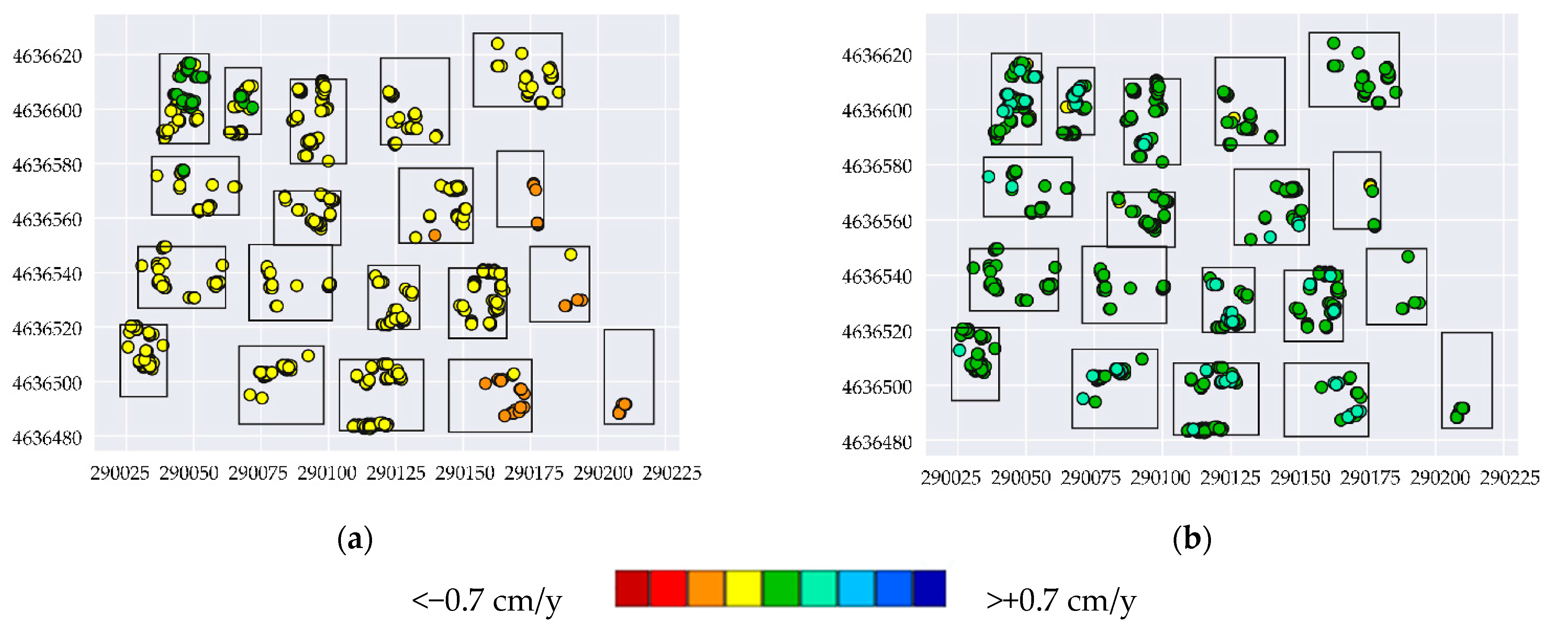
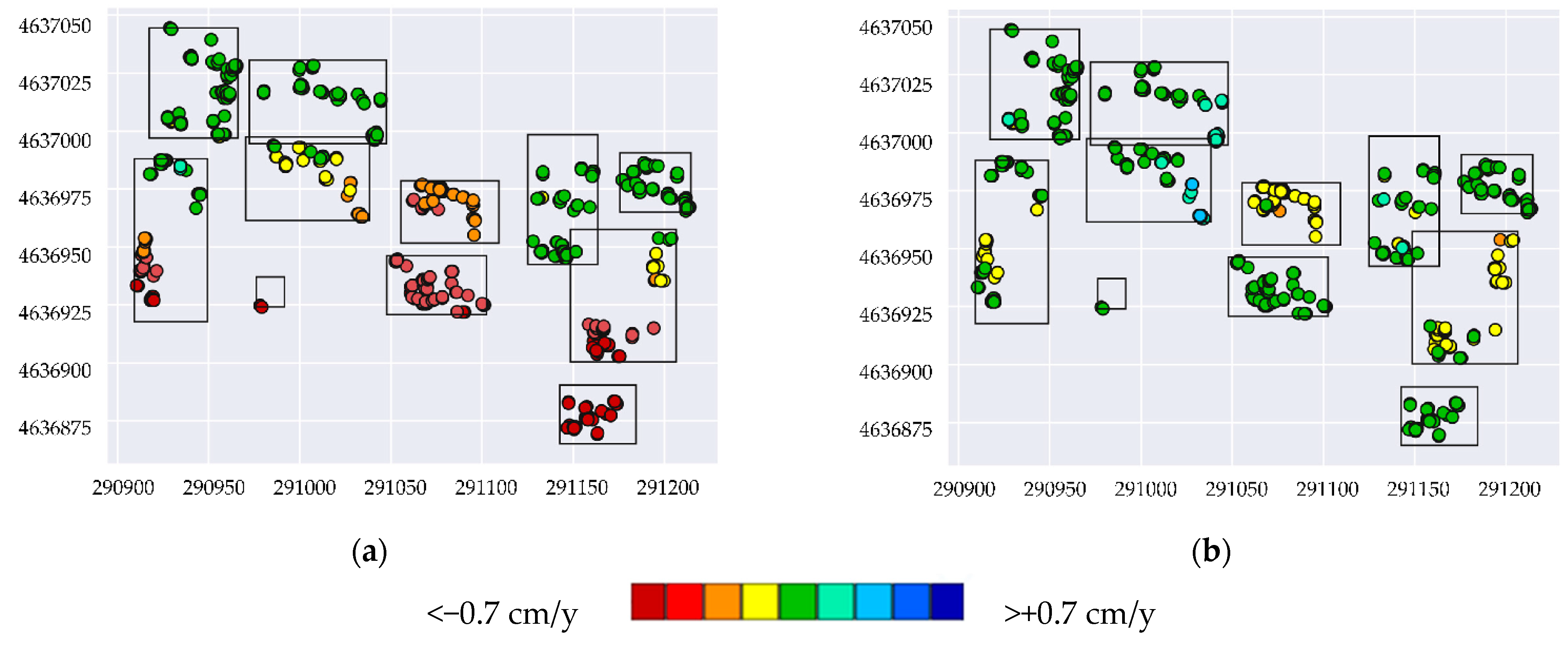
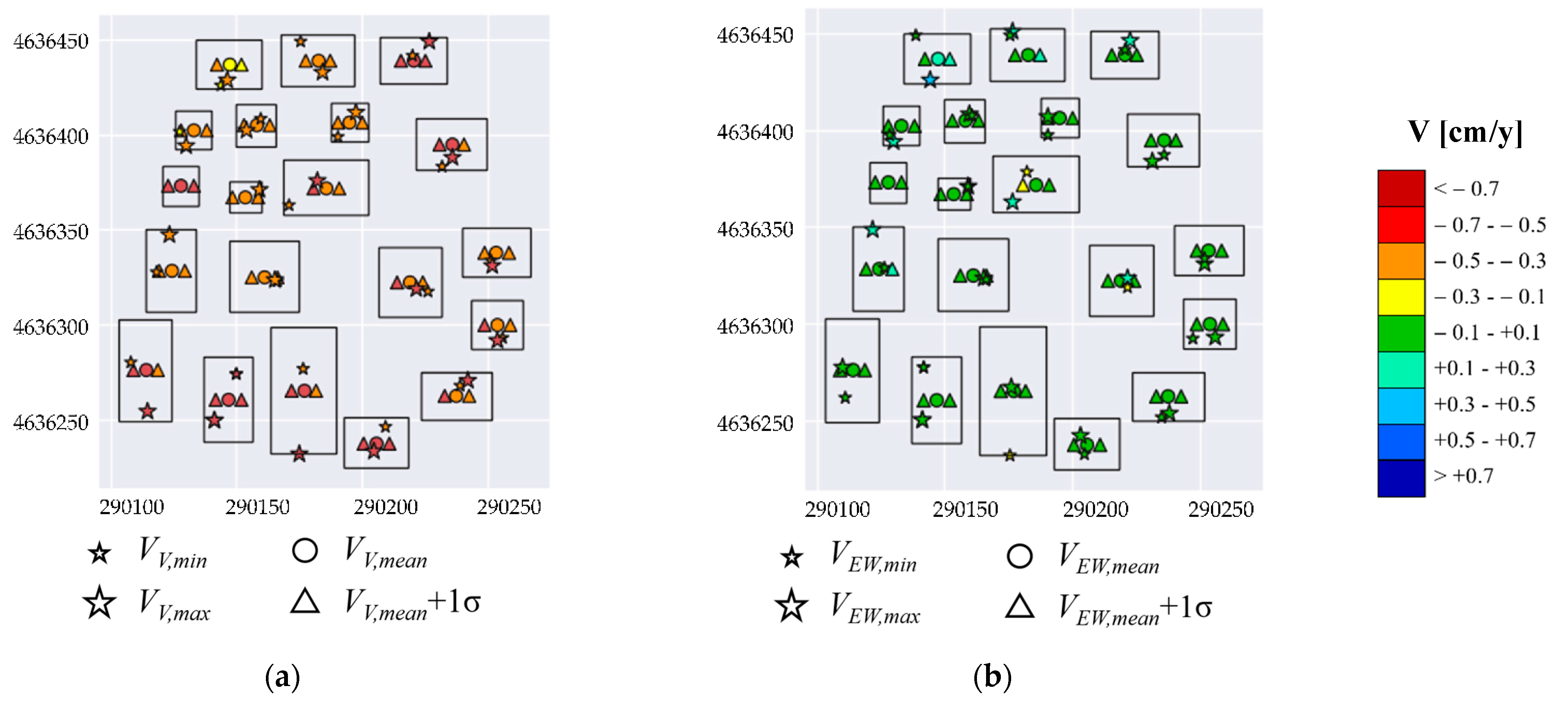
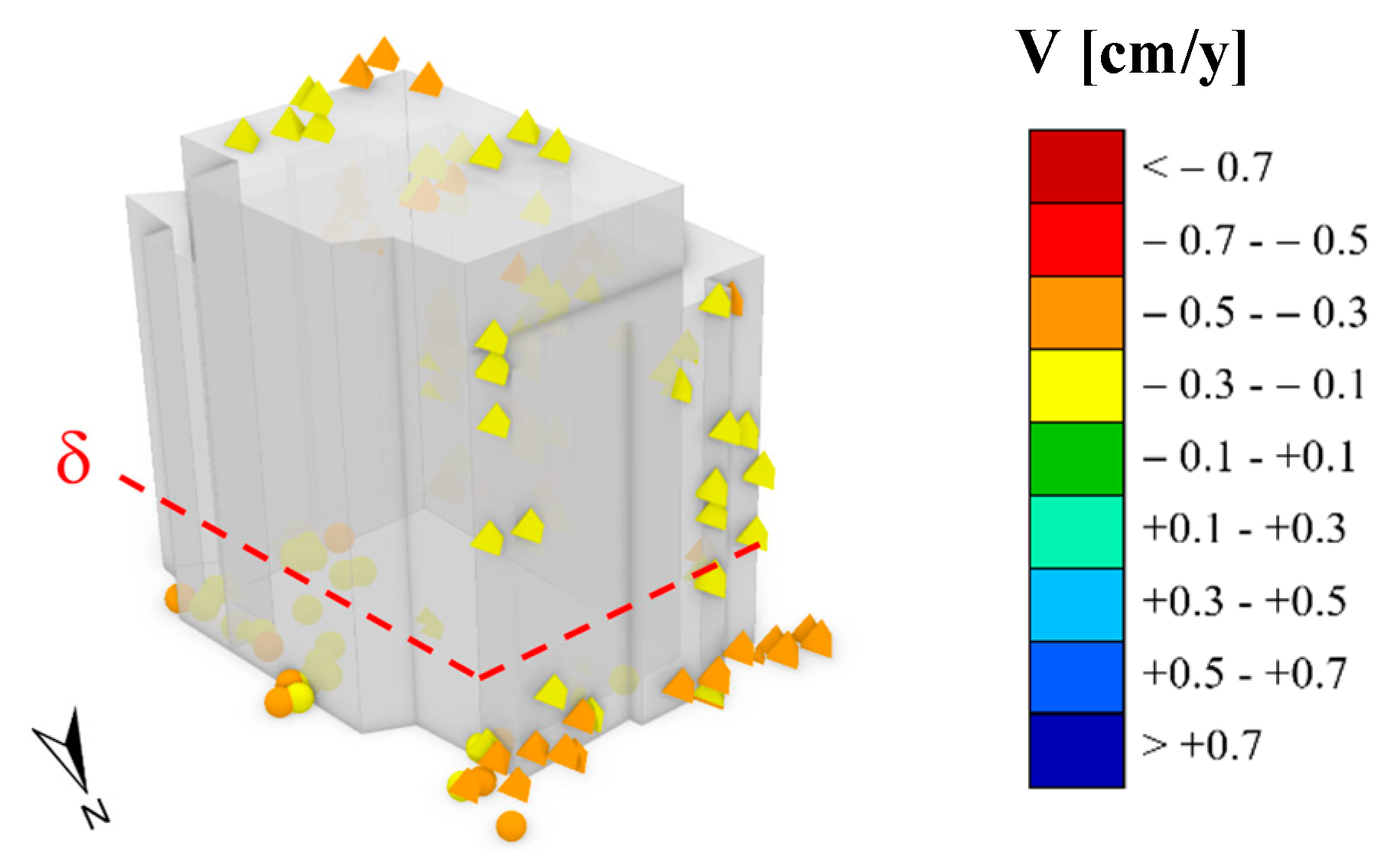
- The third one (blue box) regards the analysis of the deformation evolution of each building in the observation period, by analyzing the velocity trends and statistics of the PSs belonging to the cluster-identified buildings. This allows, through the retrieval of synthetic deformation maps of the investigated area (with focus on the buildings), to carry on a preliminary identification and ranking of critical buildings to be further investigated.
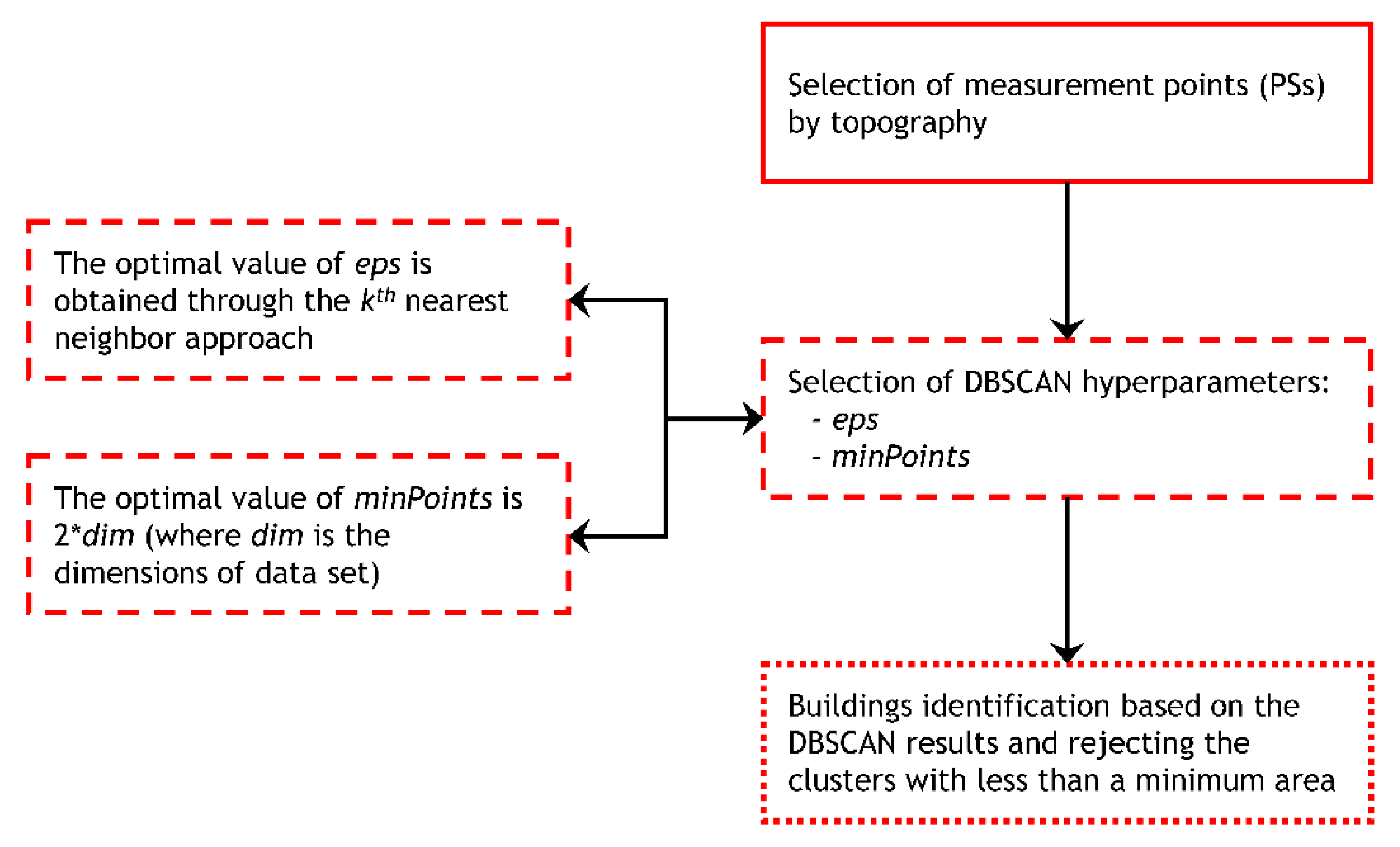
2.3.1. Buildings Identification through DBSCAN Algorithm
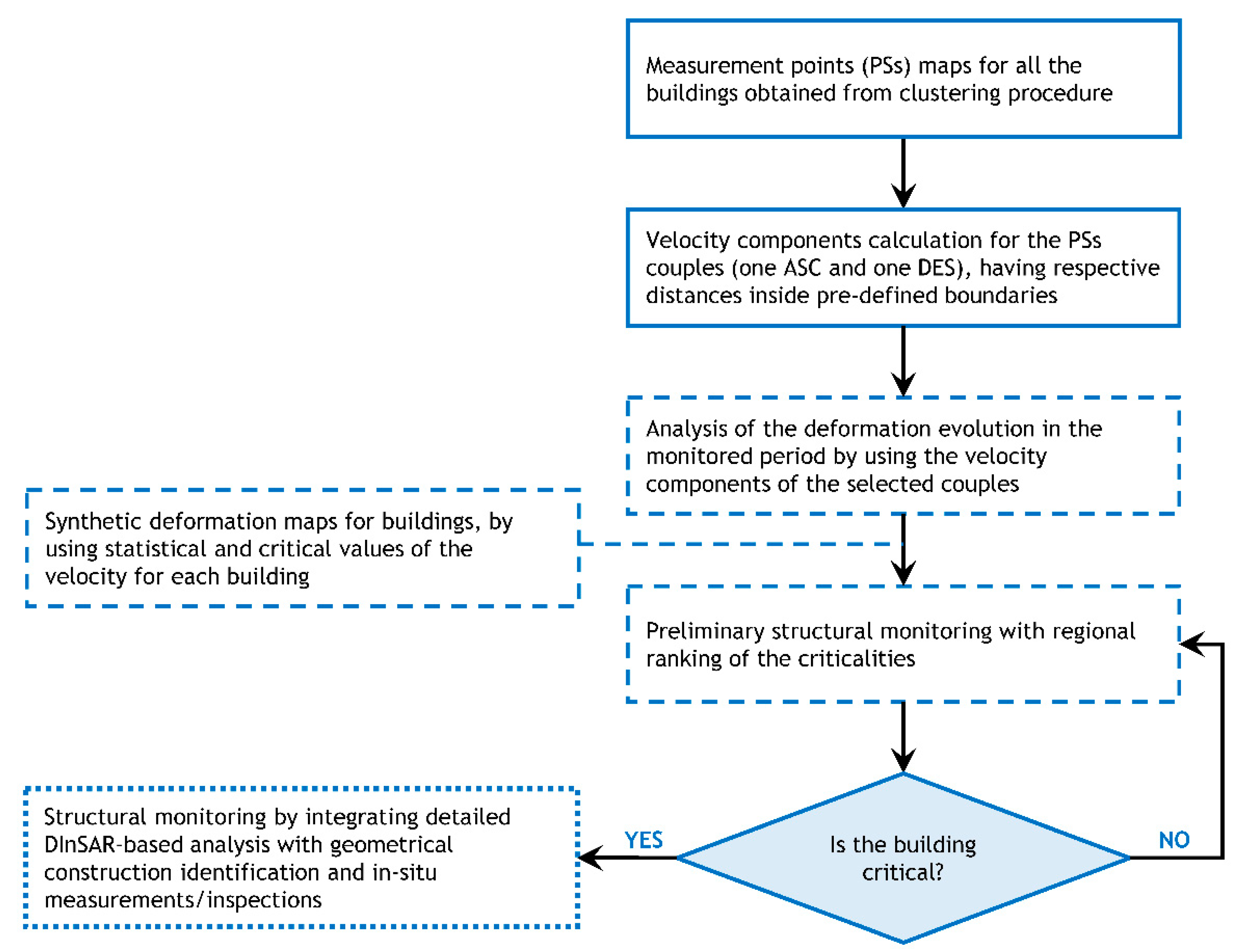
2.3.2. Preliminary Identification and Ranking of Critical Constructions
3. Results
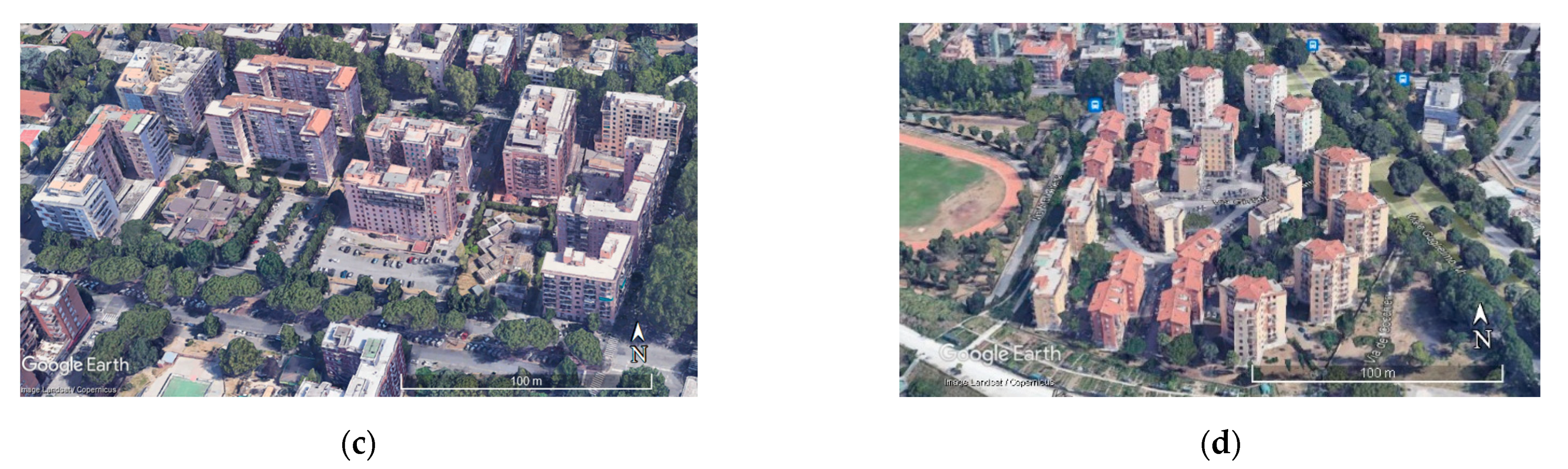
3.1. Case Study Areas
3.2. Algorithm Application and Clustering Results
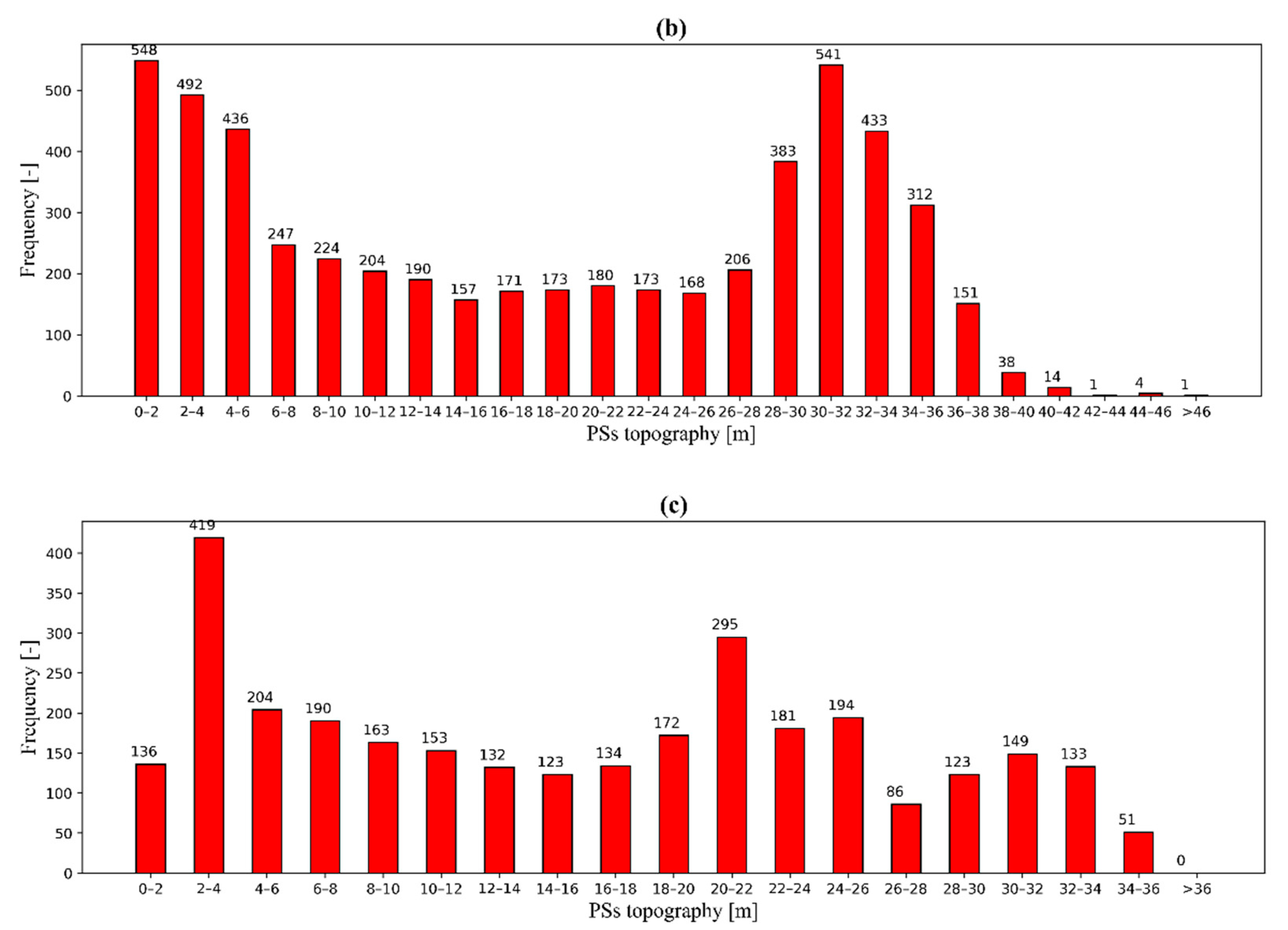
3.2.1. Selection of PSs by Topography
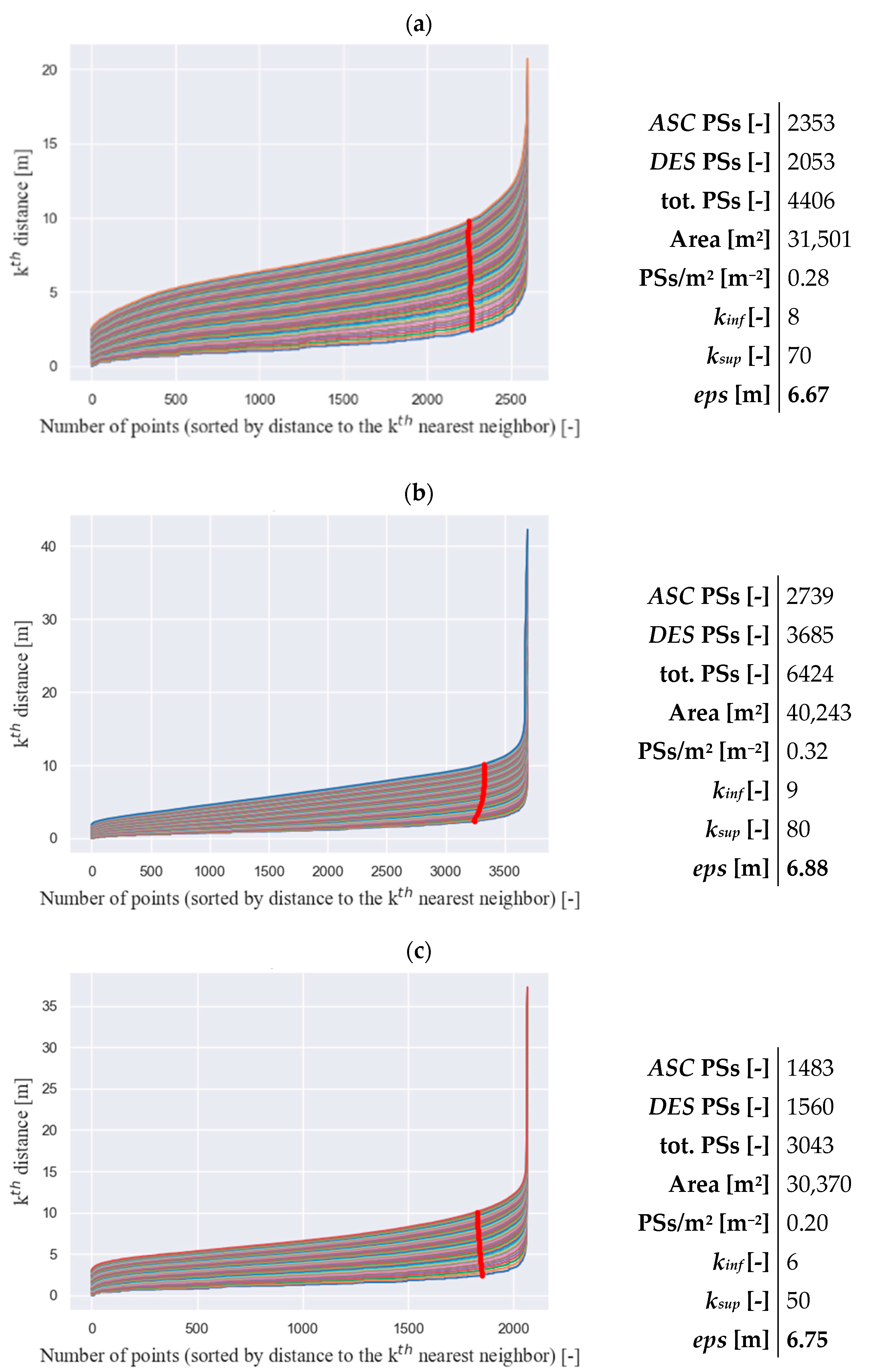
3.2.2. Selection of DBSCAN Hyper-Parameters
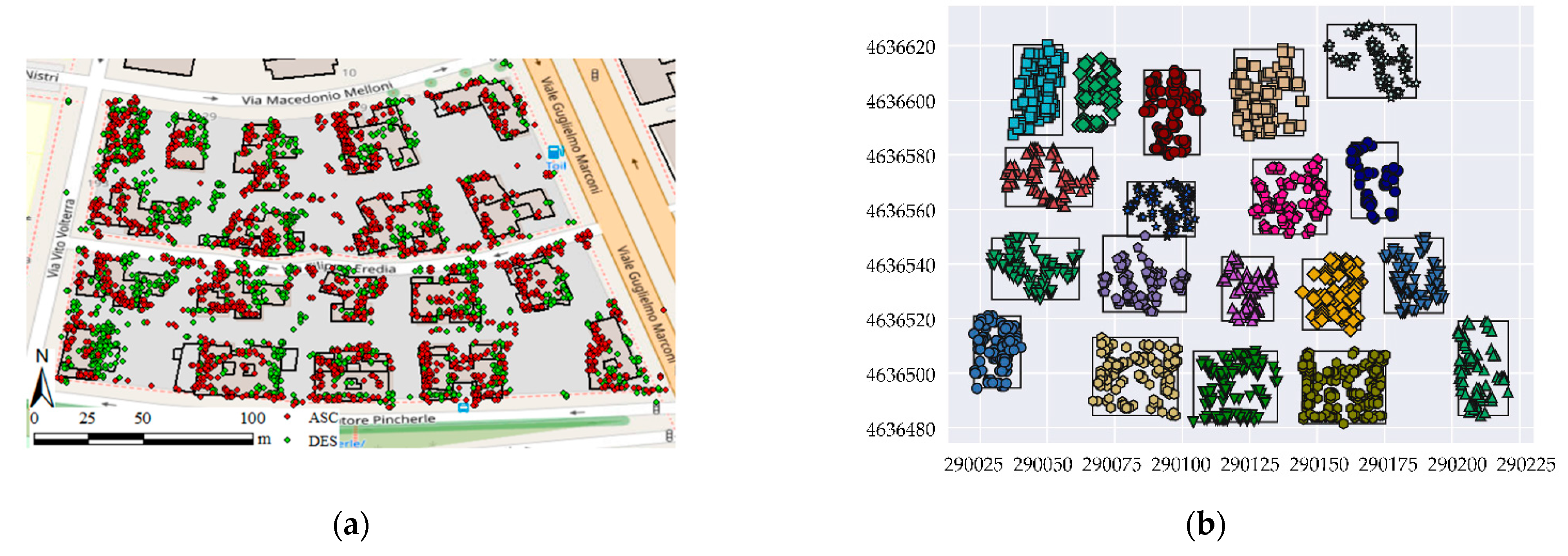
3.2.3. Clustering Results
3.3. Potential Application for Structural Monitoring
3.4. Validation of the Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arangio, S.; Calò, F.; Di Mauro, M.; Bonano, M.; Marsella, M.; Manunta, M. An application of the SBAS-DInSAR technique for the assessment of structural damage in the city of Rome. Struct. Infrastruct. Eng. 2014, 10, 1469–1483. [Google Scholar] [CrossRef]
- Di Carlo, F.; Miano, A.; Giannetti, I.; Mele, A.; Bonano, M.; Lanari, R.; Meda, A.; Prota, A. On the integration of multi-temporal synthetic aperture radar interferometry products and historical surveys data for buildings structural monitoring. J. Civ. Struct. Health Monit. 2021, 11, 1429–1447. [Google Scholar] [CrossRef]
- Infante, D.; Confuorto, P.; Di Martire, D.; Ramondini, M.; Calcaterra, D. Use of DInSAR data for multi-level vulnerability assessment of urban settings affected by slow-moving and intermittent landslides. Procedia Eng. 2016, 158, 470–475. [Google Scholar] [CrossRef] [Green Version]
- Peduto, D.; Pisciotta, G.; Nicodemo, G.; Arena, L.; Ferlisi, S.; Gullà, G.; Borrelli, L.; Fornaro, G.; Reale, D. A procedure for the analysis of building vulnerability to slow-moving landslides. In Proceedings of the 1st IMEKO International Workshop on Metrology for Geotechnics, Benevento, Italy, 17–18 March 2016. [Google Scholar]
- Del Soldato, M.; Solari, L.; Poggi, F.; Raspini, F.; Tomás, R.; Fanti, R.; Casagli, N. Landslide-Induced Damage Probability Estimation Coupling InSAR and Field Survey Data by Fragility Curves. Remote Sens. 2019, 11, 1486. [Google Scholar] [CrossRef] [Green Version]
- Infante, D.; Di Martire, D.; Confuorto, P.; Tessitore, S.; Tòmas, R.; Calcaterra, D.; Ramondini, M. Assessment of building behavior in slow-moving landslide-affected areas through DInSAR data and structural analysis. Eng. Struct. 2019, 199, 109638. [Google Scholar] [CrossRef] [Green Version]
- Miano, A.; Mele, A.; Calcaterra, D.; Di Martire, D.; Infante, D.; Prota, A.; Ramondini, M. The use of satellite data to support the structural health monitoring in areas affected by slow-moving landslides: A potential application to reinforced concrete buildings. Struct. Health Monit. 2021, 20, 3265–3287. [Google Scholar] [CrossRef]
- Mele, A.; Miano, A.; Di Martire, D.; Infante, D.; Ramondini, M.; Prota, A. Potential of remote sensing data to support the seismic safety assessment of reinforced concrete buildings affected by slow-moving landslides. Arch. Civ. Eng. 2022, 22, 88. [Google Scholar] [CrossRef]
- Drougkas, A.; Verstrynge, E.; Van Balen, K.; Shimoni, M.; Croonenborghs, T.; Hayen, R.; Declercq, P.Y. Country-scale InSAR monitoring for settlement and uplift damage calculation in architectural heritage structures. Struct. Health Monit. 2020, 1475921720942120. [Google Scholar] [CrossRef]
- Giannico, C.; Ferretti, A.; Alberti, S.; Jurina, L.; Ricci, M.; Sciotti, A. Application of satellite radar interferometry for structural damage assessment and monitoring LifeCycle and Sustainability of Civil Infrastructure Systems. In Proceedings of the 3rd International Symphosium on Life-Cycle Civil Engineering (IALCCE ’12), Vienna, Austria, 3–6 October 2012. [Google Scholar]
- Herrera, G.; Tomás, R.; Vicente, F.; Lopez-Sanchez, J.M.; Mallorquí, J.J.; Mulas, J. Mapping ground movements in open pit mining areas using differential SAR interferometry. Int. J. Rock Mech. Min. 2010, 47, 1114–1125. [Google Scholar] [CrossRef]
- Miano, A.; Mele, A.; Prota, A. Fragility curves for different classes of existing RC buildings under ground differential settlements. Eng. Struct. 2022, 257, 114077. [Google Scholar] [CrossRef]
- Nappo, N.; Peduto, D.; Polcari, M.; Livio, F.; Ferrario, M.F.; Comerci, V.; Stramondo, S.; Michetti, A.M. Subsidence in Como historic centre (northern Italy): Assessment of building vulnerability combining hydrogeological and stratigraphic features, Cosmo-SkyMed InSAR and damage data. Int. J. Disaster Risk Reduct. 2021, 56, 102115. [Google Scholar] [CrossRef]
- Gabriel, A.K.; Goldstein, R.M.; Zebker, H.A. Mapping small elevation changes over large areas: Differential radar interferometry. J. Geophys. Res. 1989, 94, 9183–9191. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef] [Green Version]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodríguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 88, 333–380. [Google Scholar] [CrossRef]
- Lanari, R.; De Natale, G.; Berardino, P.; Sansosti, E.; Ricciardi, G.P.; Borgstrom, S.; Capuano, P.; Pingue, F.; Troise, C. Evidence for a peculiar style of ground deformation inferred at Vesuvius volcano. Geophys. Res. Lett. 2002, 29, 6-1–6-4. [Google Scholar] [CrossRef]
- Del Soldato, M.; Riquelme, A.; Bianchini, S.; Tomàs, R.; Di Martire, D.; De Vita, P.; Moretti, S.; Calcaterra, D. Multisource data integration to investigate one century of evolution for the Agnone landslide (Molise, southern Italy). Landslides 2018, 15, 2113–2128. [Google Scholar] [CrossRef] [Green Version]
- Bianchini, S.; Pratesi, F.; Nolesini, T.; Casagli, N. Building deformation assessment by means of persistent scatterer interferometry analysis on a landslide-affected area: The Volterra (Italy) case study. Remote Sens. 2015, 7, 4678–4701. [Google Scholar] [CrossRef] [Green Version]
- Ponzo, F.C.; Iacovino, C.; Ditommaso, R.; Bonano, M.; Lanari, R.; Soldovieri, F.; Cuomo, V.; Bozzano, F.; Ciampi, P.; Rompato, M. Transport Infrastructure SHM Using Integrated SAR Data and On-Site Vibrational Acquisitions: “Ponte Della Musica–Armando Trovajoli” Case Study. Appl. Sci. 2021, 11, 6504. [Google Scholar] [CrossRef]
- Zhang, K.; Yan, j.; Chen, S.C. Automatic construction of building footprints from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2523–2533. [Google Scholar] [CrossRef] [Green Version]
- Aljumaily, H.; Laefer, D.F.; Cuadra, D. Urban point cloud mining based on density clustering and MapReduce. J. Comput. Civ. Eng. 2017, 31, 04017021. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L. Deep learning-based classification and reconstruction of residential scenes from large-scale point clouds. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1887–1897. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, H.; Pang, L.; Fang, L.; Dou, W. DBSCAN-based point cloud extraction for Tomographic synthetic aperture radar (TomoSAR) three-dimensional (3D) building reconstruction. Int. J. Remote Sens. 2021, 42, 2327–2349. [Google Scholar] [CrossRef]
- Rahimzad, M.; Homayouni, S.; Alizadeh Naeini, A.; Nadi, S. An Efficient Multi-Sensor Remote Sensing Image Clustering in Urban Areas via Boosted Convolutional Autoencoder (BCAE). Remote Sens. 2021, 13, 2501. [Google Scholar] [CrossRef]
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing, 1st ed.; CRC Press LLC: Boca Raton, FL, USA, 1999. [Google Scholar]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E. A small baseline approach for investigating deformations on full resolution differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Manunta, M.; Marsella, M.; Zeni, G.; Sciotti, M.; Atzori, S.; Lanari, R. Two-scale surface deformation analysis using the SBAS-DInSAR technique: A case study of the city of Rome, Italy. Int. J. Remote Sens. 2008, 29, 1665–1684. [Google Scholar] [CrossRef]
- Bonano, M.; Manunta, M.; Marsella, M.; Lanari, R. Long-term ERS/ENVISAT deformation time-series generation at full spatial resolution via the extended SBAS technique. Int. J. Remote Sens. 2012, 33, 4756–4783. [Google Scholar] [CrossRef]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval from DInSAR data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Manunta, M.; De Luca, C.; Zinno, I.; Casu, F.; Manzo, M.; Bonano, M.; Fusco, A.; Pepe, A.; Onorato, G.; Berardino, P.; et al. The parallel SBAS approach for Sentinel-1 interferometric wide swath deformation time-series generation: Algorithm description and products quality assessment. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6259–6281. [Google Scholar] [CrossRef]
- Manzo, M.; Fialko, Y.; Casu, F.; Pepe, A.; Lanari, R. A Quantitative Assessment of DInSAR Measurements of Interseismic Deformation: The Southern San Andreas Fault Case Study. Pure Appl. Geophys. 2012, 169, 1463–1482. [Google Scholar] [CrossRef]
- Bonano, M.; Manunta, M.; Pepe, A.; Paglia, L.; Lanari, R. From previous C-band to new X-band SAR systems: Assessment of the DInSAR mapping improvement for deformation time-series retrieval in urban areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1973–1984. [Google Scholar] [CrossRef]
- Hooper, A.; Bekaert, D.; Spaans, K.; Arikan, M. Recent advances in SAR interferometry time series analysis for measuring crustal deformation. Tectonophysics 2012, 514, 1–13. [Google Scholar] [CrossRef]
- Talledo, D.A.; Miano, A.; Bonano, M.; Di Carlo, F.; Lanari, R.; Manunta, M.; Meda, A.; Mele, A.; Prota, A.; Saetta, A.; et al. Satellite radar interferometry: Potential and limitations for structural assessment and monitoring. J. Build. Eng. 2022, 46, 103756. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xuet, X. A density-based algorithm for discovering clusters in large spatial databases with noise. Kdd 1996, 96, 226–231. [Google Scholar]
- Schubert, J.; Sander, M.; Ester, H.; Kriegel, P.; Xu, X. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Huang, F.; Zhu, Q.; Zhou, J.; Tao, J.; Zhou, X.; Jin, D.; Tan, X.; Wang, L. Research on the Parallelization of the DBSCAN Clustering Algorithm for Spatial Data Mining Based on the Spark Platform. Remote Sens. 2017, 9, 1301. [Google Scholar] [CrossRef] [Green Version]
- Xie, C.; Chen, P.; Pan, D.; Zhong, C.; Zhang, Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sens. 2021, 13, 4303. [Google Scholar] [CrossRef]
- Roshandel, S.; Liu, W.; Wang, C.; Li, J. 3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds. Remote Sens. 2021, 13, 3918. [Google Scholar] [CrossRef]
- Xu, Q.; Cao, L.; Xue, L.; Chen, B.; An, F.; Yun, T. Extraction of Leaf Biophysical Attributes Based on a Computer Graphic-based Algorithm Using Terrestrial Laser Scanning Data. Remote Sens. 2019, 11, 15. [Google Scholar] [CrossRef] [Green Version]
- Starczewski, A.; Cader, A. Determining the EPS parameter of the DBSCAN algorithm. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing (ICAISC), Zakopane, Poland, 16–20 June 2019; Springer: Cham, Switzerland, 2019; pp. 16–20. [Google Scholar] [CrossRef]
- Rahmah, N.; Sitanggang, I.S. Determination of optimal epsilon (eps) value on dbscan algorithm to clustering data on peatland hotspots in sumatra. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2016; Volume 31, p. 012012. [Google Scholar]
- Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. Density-based clustering in spatial databases: The algorithm gdbscan and its applications. Data Min. Knowl. Discov. 1998, 2, 169–194. [Google Scholar] [CrossRef]
- Berto, L.; Doria, A.; Saetta, A.; Stella, A.; Talledo, D. Assessment of the Applicability of DInSAR Techniques for Structural Monitoring of Cultural Heritage and Archaeological Sites. In International Workshop on Civil Structural Health Monitoring; Springer: Cham, Switzerland, 2021; pp. 691–697. [Google Scholar] [CrossRef]
- Stramondo, S.; Bozzano, F.; Marra, F.; Wegmuller, U.; Cinti, F.R.; Moro, M.; Saroli, M. Subsidence induced by urbanisation in the city of Rome detected by advanced InSAR technique and geotechnical investigations. Remote Sens. Environ. 2008, 112, 3160–3172. [Google Scholar] [CrossRef]
- Scifoni, S.; Bonano, M.; Marsella, M.; Sonnessa, A.; Tagliafierro, V.; Manunta, M.; Lanari, R.; Ojha, C.; Sciotti, M. On the joint exploitation of long-term DInSAR time series and geological information for the investigation of ground settlements in the town of Roma (Italy). Remote Sens. Environ. 2016, 182, 113–127. [Google Scholar] [CrossRef]
- Bozzano, F.; Ciampi, P.; Del Monte, M.; Innocca, F.; Luberti, G.M.; Mazzanti, P.; Rivellino, S.; Rompato, M.; Scancella, S.; Scarascia Mugnozza, G. Satellite A-DInSAR monitoring of the Vittoriano monument (Rome, Italy): Implications for heritage reserva tion. Ital. J. Eng. Geol. Environ. 2020, 2, 5–17. [Google Scholar] [CrossRef]
- Decreto Ministeriale Sanità 5 Luglio 1975—Modificazioni Alle Istruzioni Ministeriali 20 Giugno 1896, Relativamente All’altezza Minima ed ai Requisiti Igienico-Sanitari Principali dei Locali di Abitazione, Gazzetta Ufficiale n.190 del 18/07/1975; Ministry of Health of Italy: Rome, Italy, 2019. (In Italian)
- CTR. Carta Tecnica Regionale Numerica Scala 1:500 Privincia di Roma. 2020. Available online: https://dati.lazio.it/catalog/it/dataset/carta-tecnica-regionale-2002-2003-5k-roma.it (accessed on 8 November 2021).
- Xu, D.; Tian, Y. A comprehensive survey of clustering algorithms. Ann. Data Sci. 2015, 2, 165–193. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area Number [-] | Ground Level δ [m] | δ Limit [m] |
|---|---|---|
| 1 | 2.59 | 8.09 |
| 2 | 2.78 | 8.28 |
| 3 | 2.64 | 8.14 |
| CLUSTER | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ASC | 75 | 41 | 93 | 124 | 69 | 63 | 43 | 100 | 38 | 65 | 80 | 55 | 63 | 81 | 51 | 70 | 88 | 129 | 63 |
| DES | 138 | 49 | 70 | 61 | 39 | 63 | 83 | 70 | 18 | 42 | 46 | 46 | 67 | 36 | 95 | 90 | 62 | 92 | 36 |
| Tot. | 213 | 90 | 163 | 185 | 108 | 126 | 126 | 170 | 56 | 107 | 126 | 101 | 130 | 117 | 146 | 160 | 150 | 221 | 99 |
| CLUSTER | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ASC | 69 | 47 | 88 | 119 | 66 | 61 | 43 | 97 | 42 | 67 | 81 | 47 | 60 | 81 | 50 | 70 | 89 | 125 | 65 |
| DES | 133 | 48 | 72 | 62 | 39 | 63 | 83 | 74 | 19 | 41 | 47 | 41 | 66 | 35 | 95 | 90 | 63 | 99 | 34 |
| Tot. | 202 | 95 | 160 | 181 | 105 | 124 | 126 | 171 | 61 | 108 | 128 | 88 | 126 | 116 | 145 | 160 | 152 | 224 | 99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mele, A.; Vitiello, A.; Bonano, M.; Miano, A.; Lanari, R.; Acampora, G.; Prota, A. On the Joint Exploitation of Satellite DInSAR Measurements and DBSCAN-Based Techniques for Preliminary Identification and Ranking of Critical Constructions in a Built Environment. Remote Sens. 2022, 14, 1872. https://doi.org/10.3390/rs14081872
Mele A, Vitiello A, Bonano M, Miano A, Lanari R, Acampora G, Prota A. On the Joint Exploitation of Satellite DInSAR Measurements and DBSCAN-Based Techniques for Preliminary Identification and Ranking of Critical Constructions in a Built Environment. Remote Sensing. 2022; 14(8):1872. https://doi.org/10.3390/rs14081872
Chicago/Turabian StyleMele, Annalisa, Autilia Vitiello, Manuela Bonano, Andrea Miano, Riccardo Lanari, Giovanni Acampora, and Andrea Prota. 2022. "On the Joint Exploitation of Satellite DInSAR Measurements and DBSCAN-Based Techniques for Preliminary Identification and Ranking of Critical Constructions in a Built Environment" Remote Sensing 14, no. 8: 1872. https://doi.org/10.3390/rs14081872
APA StyleMele, A., Vitiello, A., Bonano, M., Miano, A., Lanari, R., Acampora, G., & Prota, A. (2022). On the Joint Exploitation of Satellite DInSAR Measurements and DBSCAN-Based Techniques for Preliminary Identification and Ranking of Critical Constructions in a Built Environment. Remote Sensing, 14(8), 1872. https://doi.org/10.3390/rs14081872