
Learning Spatio-Temporal Attention Based Siamese Network for Tracking UAVs in the Wild



Abstract
:1. Introduction
- This paper proposes a novel Siamese based tracker that integrates local tracking and global re-detection mechanisms in a unified framework and perform them adaptively depending on varying target states.
- This paper designs a spatio-temporal attention based local tracking strategy to eliminate background clusters and better perceive small targets.
- A three-stage global re-detection strategy to recapture targets in a wide range is proposed.
2. Related Works
2.1. Correlation Filter
2.2. Siamese Network
2.3. TIR Tracking
3. Method
3.1. Revisiting SiamRCNN
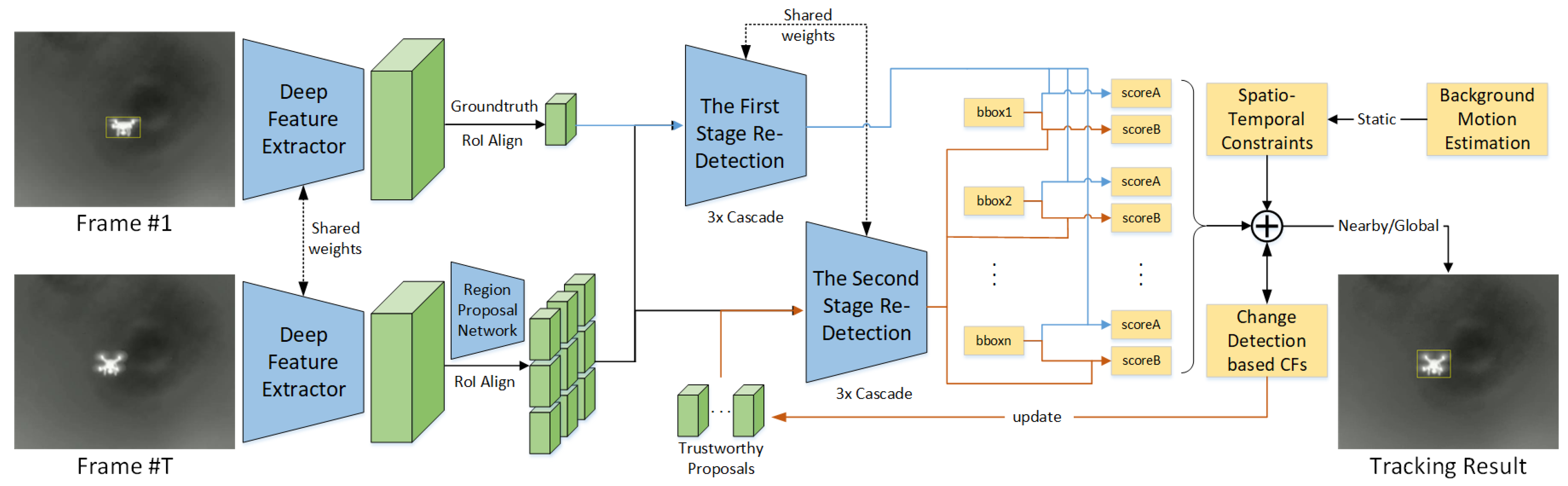
3.2. SiamSTA Framework
3.2.1. Spatio-Temporal Constraints for Local Tracking
3.2.2. Global Motion Estimation
3.2.3. Change Detection Based CFs for Three-Stage Re-Detection
3.3. Online Tracking and Updating
4. Experiments
4.1. Experimental Setup
4.1.1. Evaluation Metrics
4.1.2. Network Parameters
4.1.3. Details about UAV Platform
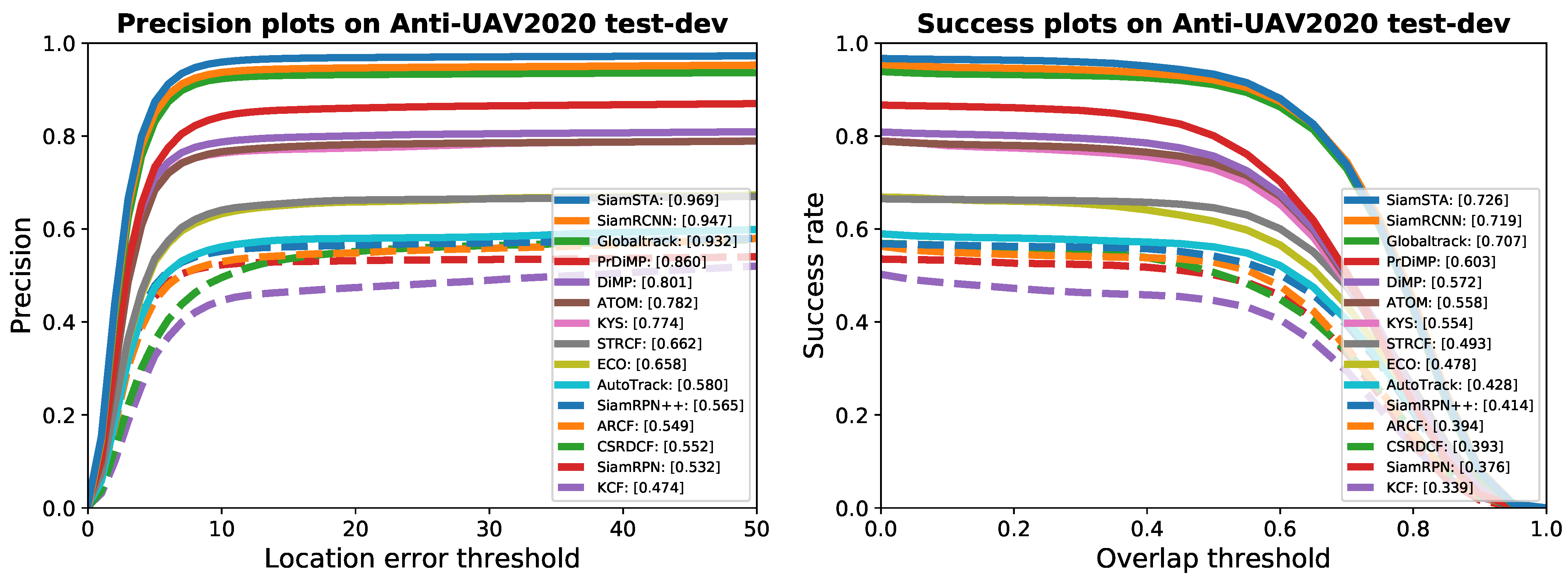
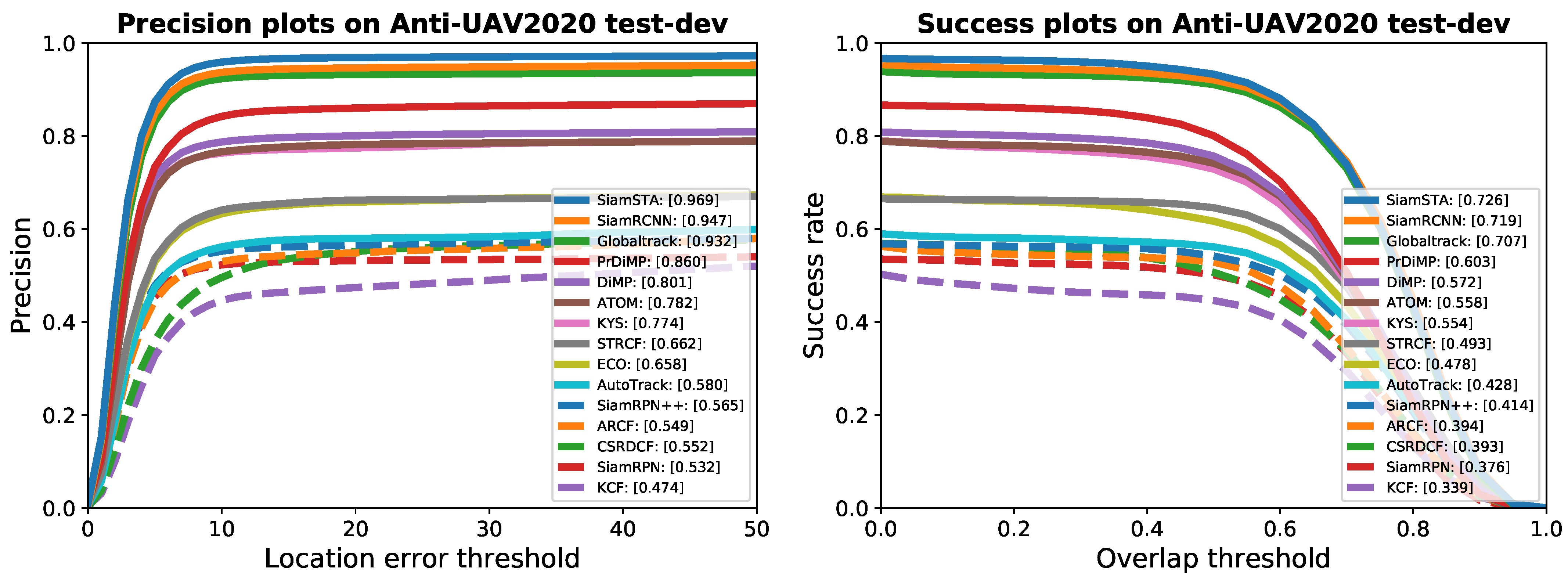
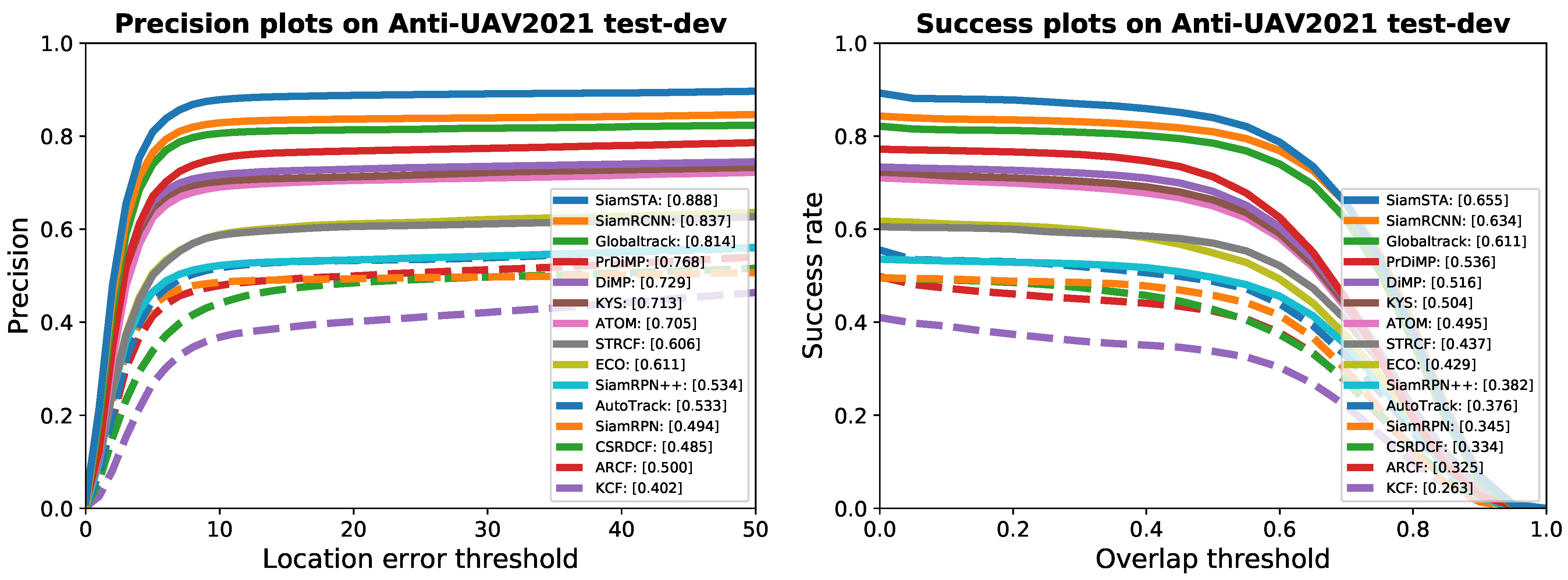
4.2. Comparing with State-of-the-Arts Trackers
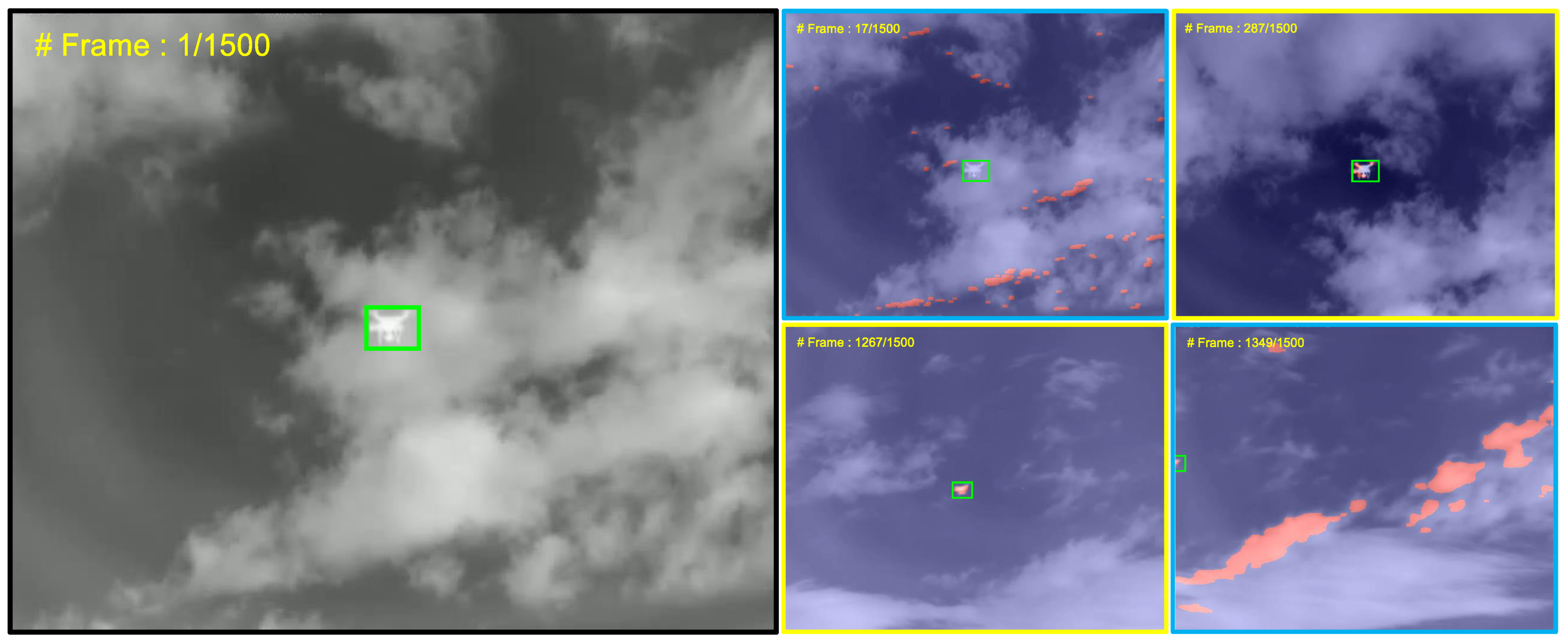
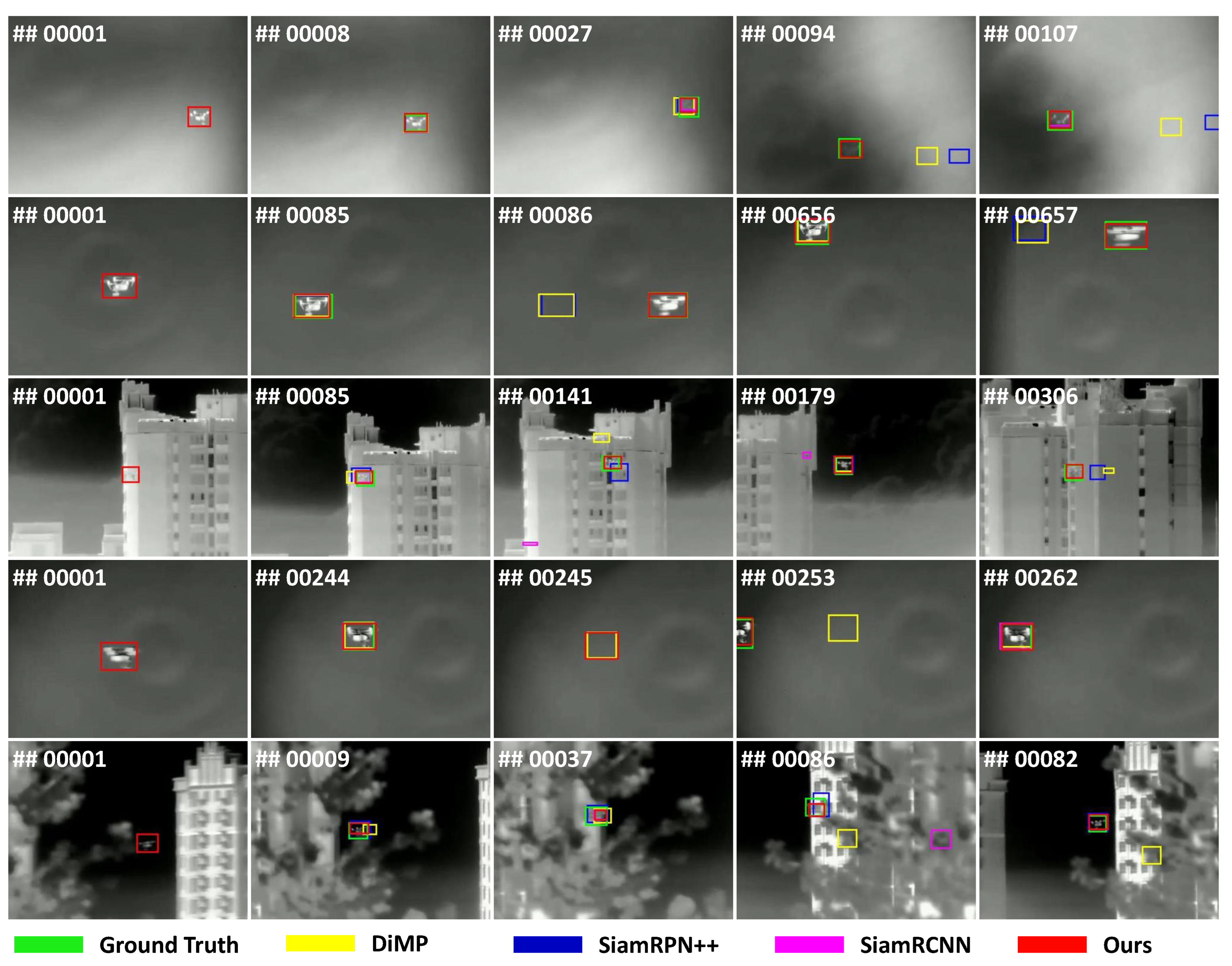
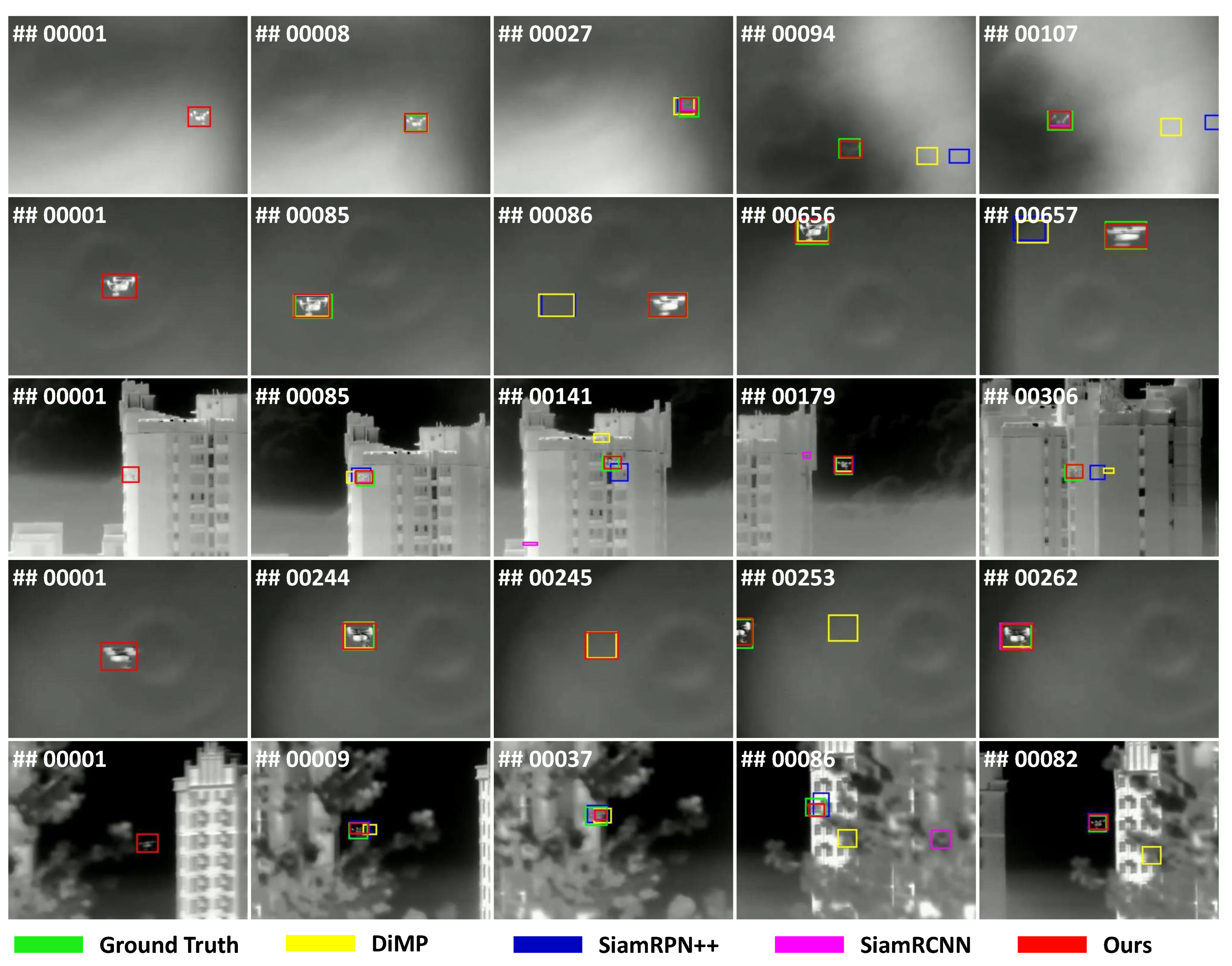
4.3. Qualitative Evaluation
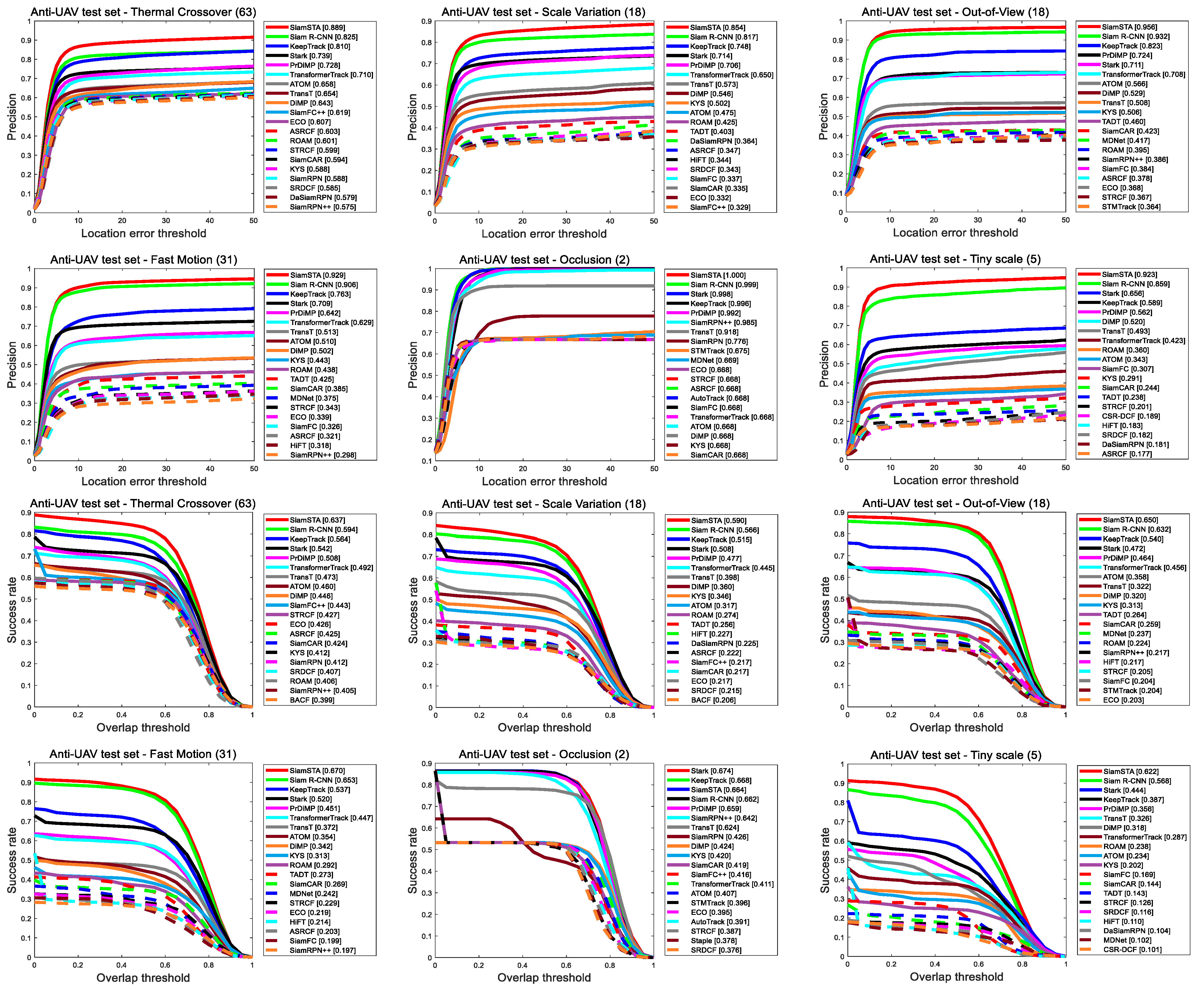
4.4. Attribute-Based Evaluation
4.5. Tracker Robustness Testing against Weather Challenges
4.6. Ablation Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for uav tracking. In Proceedings of the Computer Vision—ECCV 2016—14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Fu, C.; Lin, F.; Li, Y.; Chen, G. Correlation filter-based visual tracking for uav with online multi-feature learning. Remote Sens. 2019, 11, 549. [Google Scholar] [CrossRef] [Green Version]
- Xue, X.; Li, Y.; Dong, H.; Shen, Q. Robust correlation tracking for UAV videos via feature fusion and saliency proposals. Remote Sens. 2018, 10, 1644. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Xu, T.; Jiang, S.; Chen, Y.; Bai, Y. Robust visual tracking via constrained multi-kernel correlation filters. IEEE Trans. Multimed. 2020, 22, 2820–2832. [Google Scholar] [CrossRef]
- Cliff, O.M.; Saunders, D.L.; Fitch, R. Robotic ecology: Tracking small dynamic animals with an autonomous aerial vehicle. Sci. Robot. 2018, 3, eaat8409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H.S. Fully-Convolutional Siamese Networks for Object Tracking. In Proceedings of the Computer Vision—ECCV 2016 Workshops, Amsterdam, The Netherlands, 8–10 and 15–16 October 2016. [Google Scholar]
- Wang, Q.; Zhang, L.; Bertinetto, L.; Hu, W.; Torr, P.H. Fast online object tracking and segmentation: A unifying approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. SiamRPN++: Evolution of Siamese Visual Tracking With Very Deep Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Guo, D.; Shao, Y.; Cui, Y.; Wang, Z.; Zhang, L.; Shen, C. Graph Attention Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, Virtual, 19–25 June 2021. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ATOM: Accurate Tracking by Overlap Maximization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Danelljan, M.; Gool, L.V.; Timofte, R. Probabilistic Regression for Visual Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Huang, B.; Xu, T.; Shen, Z.; Jiang, S.; Zhao, B.; Bian, Z. SiamATL: Online Update of Siamese Tracking Network via Attentional Transfer Learning. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Voigtlaender, P.; Luiten, J.; Torr, P.H.; Leibe, B. Siam R-CNN: Visual Tracking by Re-Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Anti-UAV Challenge Dataset. Available online: https://anti-uav.github.io/ (accessed on 1 May 2021).
- Zhao, J.; Wang, G.; Li, J.; Jin, L.; Fan, N.; Wang, M.; Wang, X.; Yong, T.; Deng, Y.; Guo, Y.; et al. The 2nd Anti-UAV Workshop & Challenge: Methods and Results. arXiv 2021, arXiv:2108.09909. [Google Scholar]
- Jiang, N.; Wang, K.; Peng, X.; Yu, X.; Wang, Q.; Xing, J.; Li, G.; Guo, G.; Zhao, J.; Han, Z. Anti-UAV: A Large Multi-Modal Benchmark for UAV Tracking. arXiv 2021, arXiv:2101.08466. [Google Scholar]
- Bolme, D.; Beveridge, J.; Draper, B.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2010, San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J.P. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Proceedings of the Computer Vision—ECCV 2012—12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Learning Spatially Regularized Correlation Filters for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2015, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Galoogahi, H.K.; Fagg, A.; Lucey, S. Learning Background-Aware Correlation Filters for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2017, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Li, Y.; Zhu, J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration. In Proceedings of the Computer Vision—ECCV 2014 Workshops, Zurich, Switzerland, 6–7 and 12 September 2014. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference, BMVC 2014, Nottingham, UK, 1–5 September 2014.
- Li, F.; Yao, Y.; Li, P.; Zhang, D.; Zuo, W.; Yang, M.H. Integrating Boundary and Center Correlation Filters for Visual Tracking with Aspect Ratio Variation. In Proceedings of the IEEE International Conference on Computer Vision Workshops, ICCV Workshops 2017, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Danelljan, M.; Khan, F.; Felsberg, M.; van de Weijer, J. Adaptive Color Attributes for Real-Time Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2014, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Ma, C.; Huang, J.B.; Yang, X.; Yang, M.H. Hierarchical Convolutional Features for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2015, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High Performance Visual Tracking With Siamese Region Proposal Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Wan, M.; Gu, G.; Qian, W.; Ren, K.; Chen, Q.; Zhang, H.; Maldague, X. Total variation regularization term-based low-rank and sparse matrix representation model for infrared moving target tracking. Remote Sens. 2018, 10, 510. [Google Scholar] [CrossRef] [Green Version]
- Zingoni, A.; Diani, M.; Corsini, G. A flexible algorithm for detecting challenging moving objects in real-time within IR video sequences. Remote Sens. 2017, 9, 1128. [Google Scholar] [CrossRef] [Green Version]
- Wan, M.; Gu, G.; Qian, W.; Ren, K.; Chen, Q.; Maldague, X. Infrared image enhancement using adaptive histogram partition and brightness correction. Remote Sens. 2018, 10, 682. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Gonzalez-Garcia, A.; Van De Weijer, J.; Danelljan, M.; Khan, F.S. Synthetic data generation for end-to-end thermal infrared tracking. IEEE Trans. Image Process. 2018, 28, 1837–1850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Felsberg, M.; Berg, A.; Hager, G.; Ahlberg, J.; Kristan, M.; Matas, J.; Leonardis, A.; Cehovin, L.; Fernandez, G.; Vojir, T. The Thermal Infrared Visual Object Tracking VOT-TIR2015 Challenge Results. In Proceedings of the IEEE International Conference on Computer Vision Workshop, ICCV Workshops 2015, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Cao, Y.; Wang, G.; Yan, D.; Zhao, Z. Two algorithms for the detection and tracking of moving vehicle targets in aerial infrared image sequences. Remote Sens. 2016, 8, 28. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Yu, Q. Online structural learning with dense samples and a weighting kernel. Pattern Recognit. Lett. 2017, 105, 59–66. [Google Scholar] [CrossRef]
- Li, M.; Peng, L.; Yingpin, C.; Huang, S.; Qin, F.; Peng, Z. Mask Sparse Representation Based on Semantic Features for Thermal Infrared Target Tracking. Remote Sens. 2019, 11, 1967. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Zhang, K.; Li, S.; Yan, J. Learning to Track Aircraft in Infrared Imagery. Remote Sens. 2020, 12, 3995. [Google Scholar] [CrossRef]
- Huang, B.; Chen, J.; Xu, T.; Wang, Y.; Jiang, S.; Wang, Y.; Wang, L.; Li, J. SiamSTA: Spatio-Temporal Attention based Siamese Tracker for Tracking UAVs. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, ICCVW 2021, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Shi, J.; Tomasi, G. Good features to track. In Proceedings of the Conference on Computer Vision and Pattern Recognition, CVPR 1994, Seattle, WA, USA, 21–23 June 1994. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 1409–1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Xu, T.; Li, J.; Wang, L.; Wang, Y.; Li, X. Adaptive Gaussian-Like Response Correlation Filter for UAV Tracking. In Proceedings of the Image and Graphics—11th International Conference, ICIG 2021, Haikou, China, 6–8 August 2021. [Google Scholar]
- Wang, M.; Liu, Y.; Huang, Z. Large Margin Object Tracking with Circulant Feature Maps. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, K. GlobalTrack: A Simple and Strong Baseline for Long-Term Tracking. In Proceedings of the Thirty-Fourth AAAI Conference on Artificial Intelligence, AAAI 2020, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Bhat, G.; Danelljan, M.; Gool, L.V.; Timofte, R. Learning Discriminative Model Prediction for Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, ICCV 2019, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Bhat, G.; Danelljan, M.; Van Gool, L.; Timofte, R. Know Your Surroundings: Exploiting Scene Information for Object Tracking. In Proceedings of the Computer Vision—ECCV 2020—16th European Conference, Glasgow, UK, 23–28 August 2020. [Google Scholar]
- Li, Y.; Fu, C.; Ding, F.; Huang, Z.; Lu, G. AutoTrack: Towards High-Performance Visual Tracking for UAV with Automatic Spatio-Temporal Regularization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Danelljan, M.; Bhat, G.; Shahbaz Khan, F.; Felsberg, M. ECO: Efficient Convolution Operators for Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Huang, Z.; Fu, C.; Li, Y.; Lin, F.; Lu, P. Learning Aberrance Repressed Correlation Filters for Real-Time UAV Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, ICCV 2019, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Li, F.; Tian, C.; Zuo, W.; Zhang, L.; Yang, M.H. Learning Spatial-Temporal Regularized Correlation Filters for Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Lukežič, A.; Vojíř, T.; Čehovin Zajc, L.; Matas, J.; Kristan, M. Discriminative Correlation Filter with Channel and Spatial Reliability. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Mayer, C.; Danelljan, M.; Paudel, D.P.; Van Gool, L. Learning Target Candidate Association to Keep Track of What Not to Track. arXiv 2021, arXiv:2103.16556. [Google Scholar]
- Yan, B.; Peng, H.; Fu, J.; Wang, D.; Lu, H. Learning spatio-temporal transformer for visual tracking. arXiv 2021, arXiv:2103.17154. [Google Scholar]
- Cao, Z.; Fu, C.; Ye, J.; Li, B.; Li, Y. HiFT: Hierarchical Feature Transformer for Aerial Tracking. arXiv 2021, arXiv:2108.00202. [Google Scholar]
- Fu, Z.; Liu, Q.; Fu, Z.; Wang, Y. STMTrack: Template-Free Visual Tracking With Space-Time Memory Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, Virtual, 19–25 June 2021. [Google Scholar]
- Chen, X.; Yan, B.; Zhu, J.; Wang, D.; Yang, X.; Lu, H. Transformer tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, Virtual, 19–25 June 2021. [Google Scholar]
- Wang, N.; Zhou, W.; Wang, J.; Li, H. Transformer Meets Tracker: Exploiting Temporal Context for Robust Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, Virtual, 19–25 June 2021. [Google Scholar]
- Yang, T.; Xu, P.; Hu, R.; Chai, H.; Chan, A.B. ROAM: Recurrently optimizing tracking model. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Chen, Z.; Zhong, B.; Li, G.; Zhang, S.; Ji, R. Siamese box adaptive network for visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Guo, D.; Wang, J.; Cui, Y.; Wang, Z.; Chen, S. SiamCAR: Siamese fully convolutional classification and regression for visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Xu, Y.; Wang, Z.; Li, Z.; Yuan, Y.; Yu, G. SiamFC++: Towards Robust and Accurate Visual Tracking with Target Estimation Guidelines. In Proceedings of the Thirty-Fourth AAAI Conference on Artificial Intelligence, AAAI 2020, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Li, X.; Ma, C.; Wu, B.; He, Z.; Yang, M.H. Target-Aware Deep Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-Aware Siamese Networks for Visual Object Tracking. In Proceedings of the Computer Vision—ECCV 201—15th European Conference, Munich, Germany, 8–14 September 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Source | Test | Validation |
|---|---|---|---|
| DSST [23] | BMVC14 | 33.11 | 39.86 |
| KCF [18] | T-PAMI15 | 33.33 | 38.53 |
| SRDCF [20] | ICCV15 | 41.00 | 46.99 |
| SiamFC [6] | ECCVW16 | 37.51 | 45.14 |
| BACF [21] | ICCV17 | 40.94 | 45.74 |
| ECO [46] | CVPR17 | 43.68 | 51.95 |
| STRCF [48] | CVPR18 | 44.89 | 50.63 |
| SiamRPN [27] | CVPR18 | 41.64 | 43.87 |
| DaSiamRPN [61] | ECCV18 | 39.61 | 44.64 |
| ARCF [47] | ICCV19 | 40.55 | 43.82 |
| ATOM [10] | CVPR19 | 49.98 | 59.82 |
| TADT [60] | CVPR19 | 43.52 | 55.20 |
| SiamRPN++ [8] | CVPR19 | 42.58 | 45.88 |
| DiMP50 [43] | ICCV19 | 49.33 | 62.48 |
| PrDiMP50 [11] | CVPR20 | 55.70 | 62.61 |
| AutoTrack [45] | CVPR20 | 38.70 | 47.49 |
| SiamFC++ [59] | AAAI20 | 44.92 | 50.44 |
| KYS [44] | ECCV20 | 46.70 | 60.35 |
| GlobalTrack [42] | AAAI20 | 64.31 | 73.84 |
| SiamCAR [58] | CVPR20 | 46.59 | 54.79 |
| SiamBAN [57] | CVPR20 | 39.53 | 42.42 |
| Siam R-CNN [13] | CVPR20 | 65.16 | 74.76 |
| ROAM [56] | CVPR20 | 45.15 | 56.15 |
| TransformerTrack [55] | CVPR21 | 54.75 | 65.21 |
| TransT [54] | CVPR21 | 52.14 | 60.86 |
| STMTrack [53] | CVPR21 | 40.86 | 46.41 |
| HiFT [52] | ICCV21 | 37.87 | 47.41 |
| Stark [51] | ICCV21 | 59.08 | 69.03 |
| KeepTrack [50] | ICCV21 | 61.05 | 67.95 |
| SiamSTA | Ours | 68.26 | 76.11 |
| Lost | STA | CD | Score (%) | |
|---|---|---|---|---|
| Baseline | 64.29 | |||
| ✓ | 64.70 | |||
| ✓ | 65.61 | |||
| ✓ | 66.44 | |||
| ✓ | ✓ | ✓ | 67.30 | |
| GLCF | 37.01 | |||
| ✓ | ✓ | 56.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Huang, B.; Li, J.; Wang, Y.; Ren, M.; Xu, T. Learning Spatio-Temporal Attention Based Siamese Network for Tracking UAVs in the Wild. Remote Sens. 2022, 14, 1797. https://doi.org/10.3390/rs14081797
Chen J, Huang B, Li J, Wang Y, Ren M, Xu T. Learning Spatio-Temporal Attention Based Siamese Network for Tracking UAVs in the Wild. Remote Sensing. 2022; 14(8):1797. https://doi.org/10.3390/rs14081797
Chicago/Turabian StyleChen, Junjie, Bo Huang, Jianan Li, Ying Wang, Moxuan Ren, and Tingfa Xu. 2022. "Learning Spatio-Temporal Attention Based Siamese Network for Tracking UAVs in the Wild" Remote Sensing 14, no. 8: 1797. https://doi.org/10.3390/rs14081797
APA StyleChen, J., Huang, B., Li, J., Wang, Y., Ren, M., & Xu, T. (2022). Learning Spatio-Temporal Attention Based Siamese Network for Tracking UAVs in the Wild. Remote Sensing, 14(8), 1797. https://doi.org/10.3390/rs14081797