
Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site

 ,
,  ,
, 

 ,
, 

Abstract
:1. Introduction
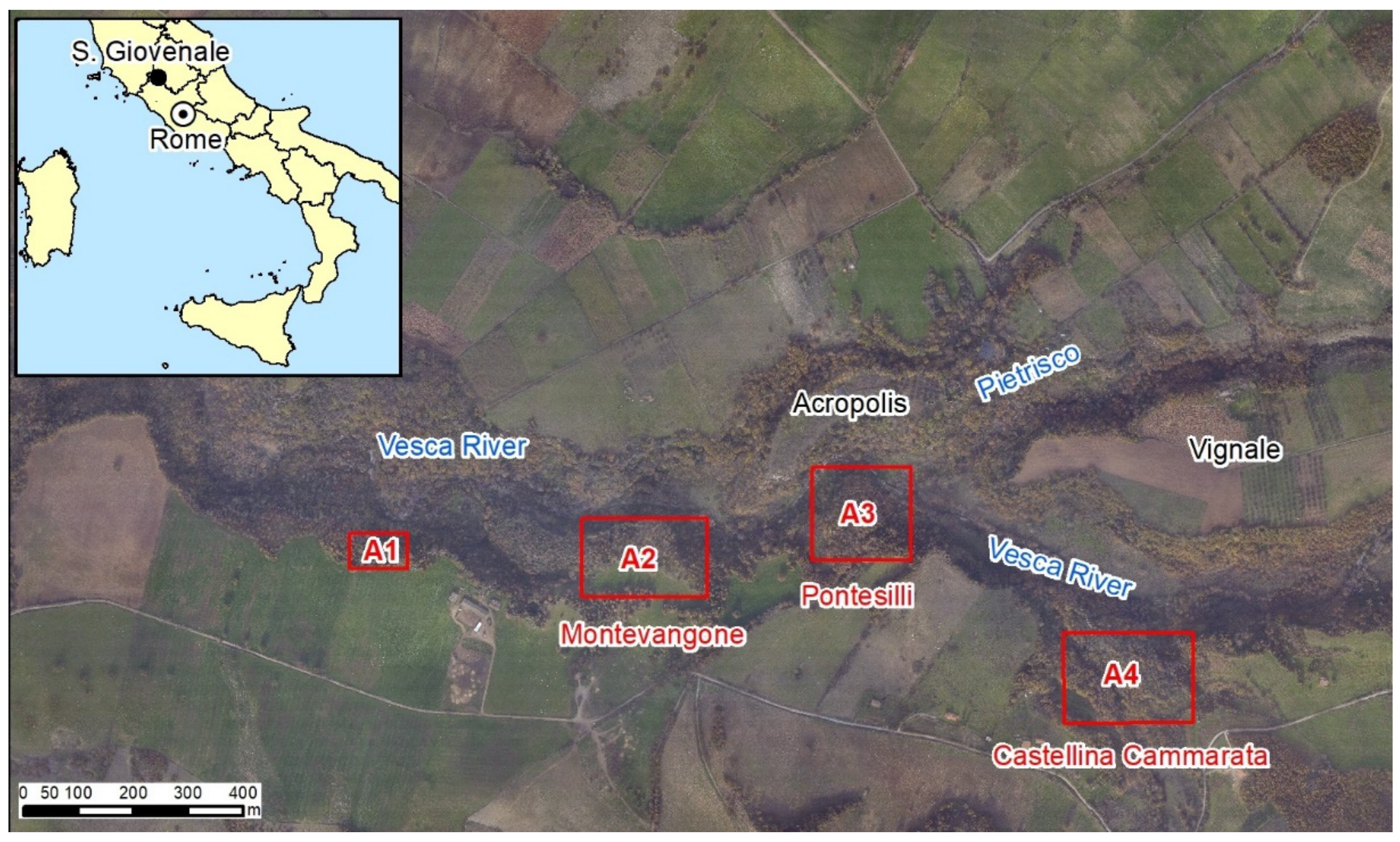
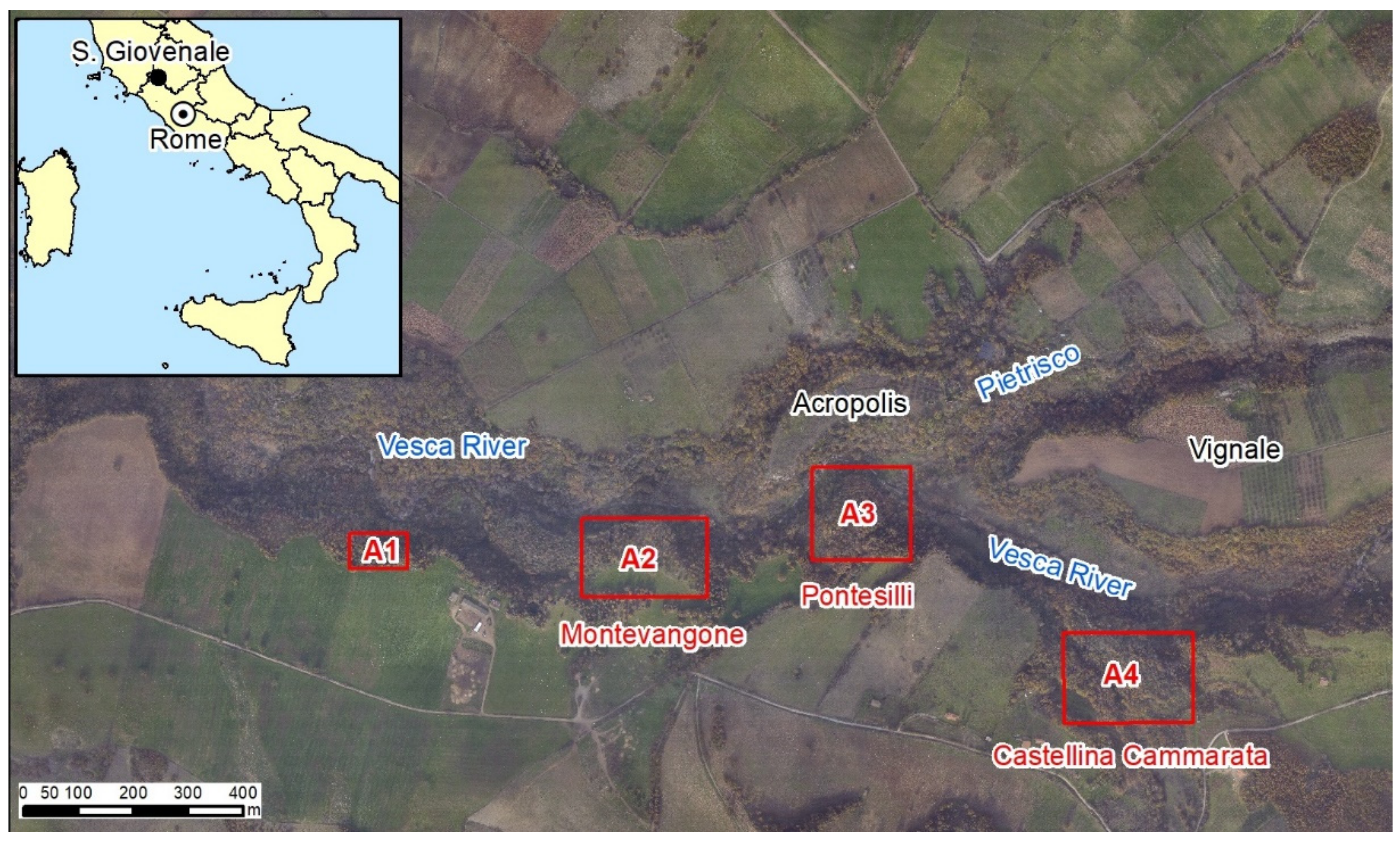
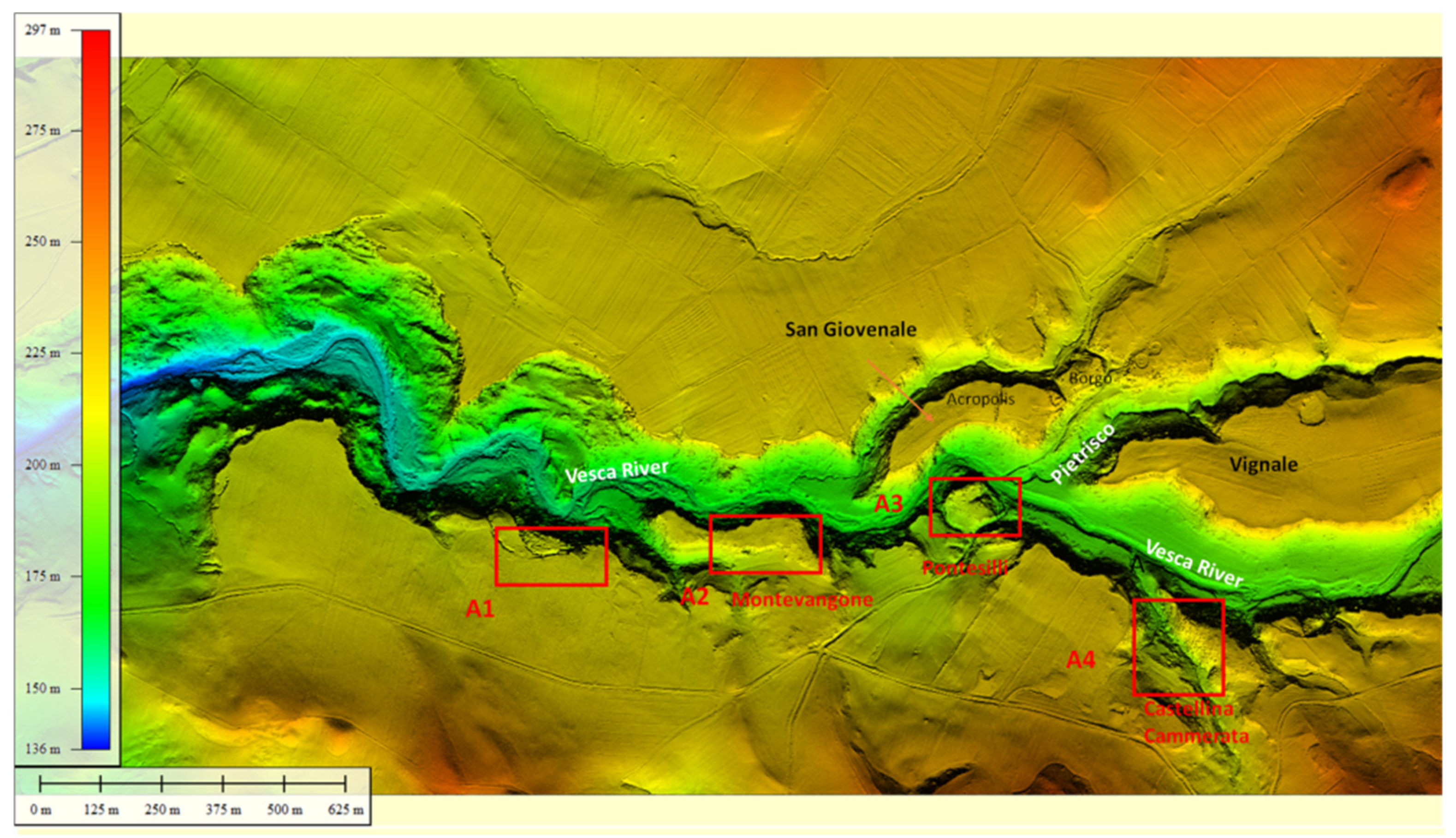
- To propose the use of LiDAR to deepen the investigation of the looting phenomenon in the archaeological area of the S. Giovenale (introduced in Section 2.1), partially covered by woods and strongly affected by clandestine excavations, ‘specialized’ in Etruscan antiquities, particularly in the second half of the 20th century [25];
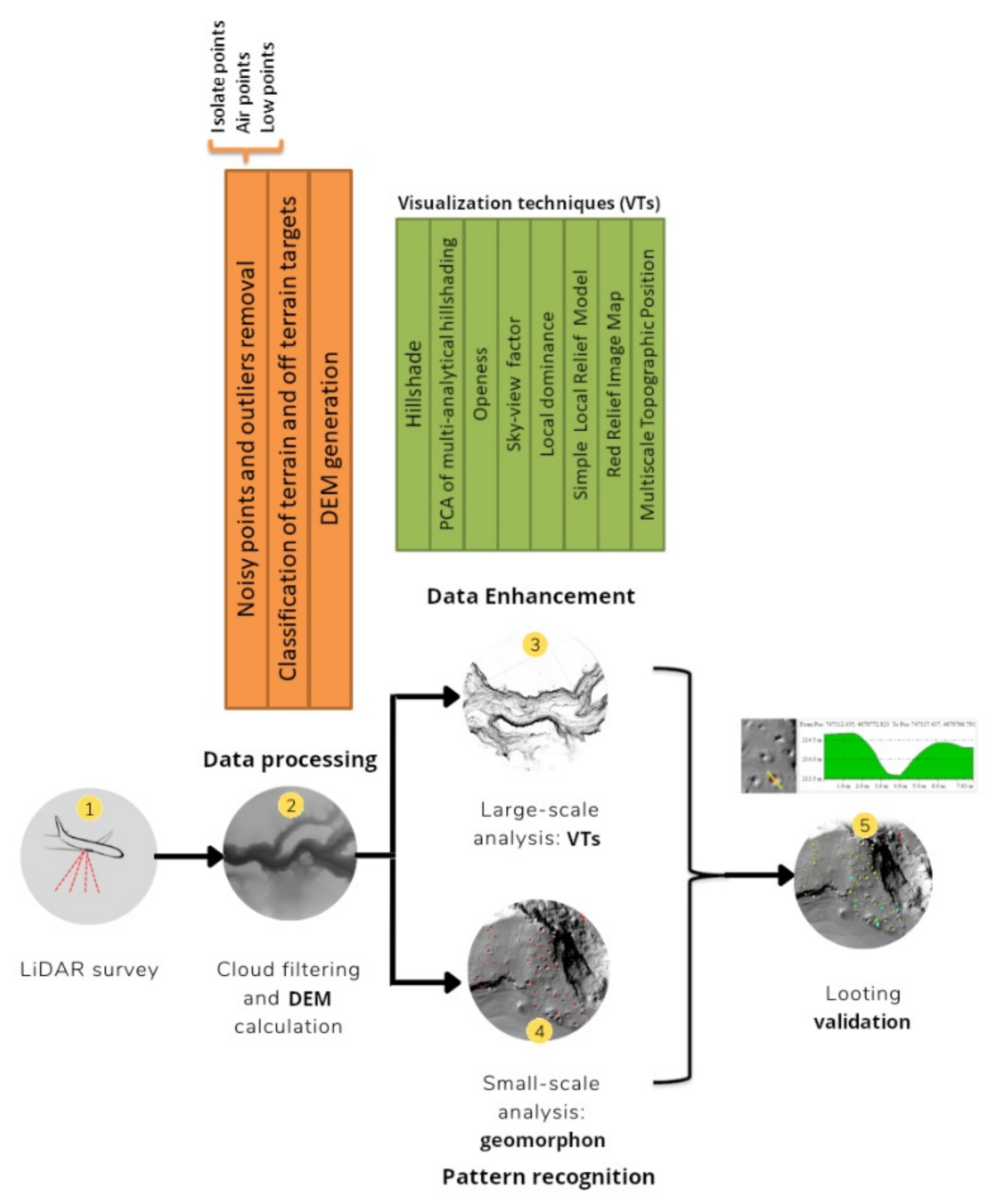
- To create a multi-scalar approach, ad hoc created for the looting phenomenon, that starts from the use of VTs (presented in Section 2.4 with the related literature) and ends with a classification model based on the Geomorphon concept. The Geomorphon approach (explained in Section 2.5 with the related references) is commonly adopted in geomorphology for the automatic classification of landforms (ACL, [26]) at a landscape scale. The Geomorphon landform/pattern recognition approach has been herein used and tested to classify and map the “small-scale” land-forms related to looting pits. Maps derived by such an approach have been compared with the results of a field survey aimed at the delineation of the topographic features related to the looting phenomena in order to verify the accuracy of the geomorphon-based approach for the detection of looting phenomena at a wider scale.
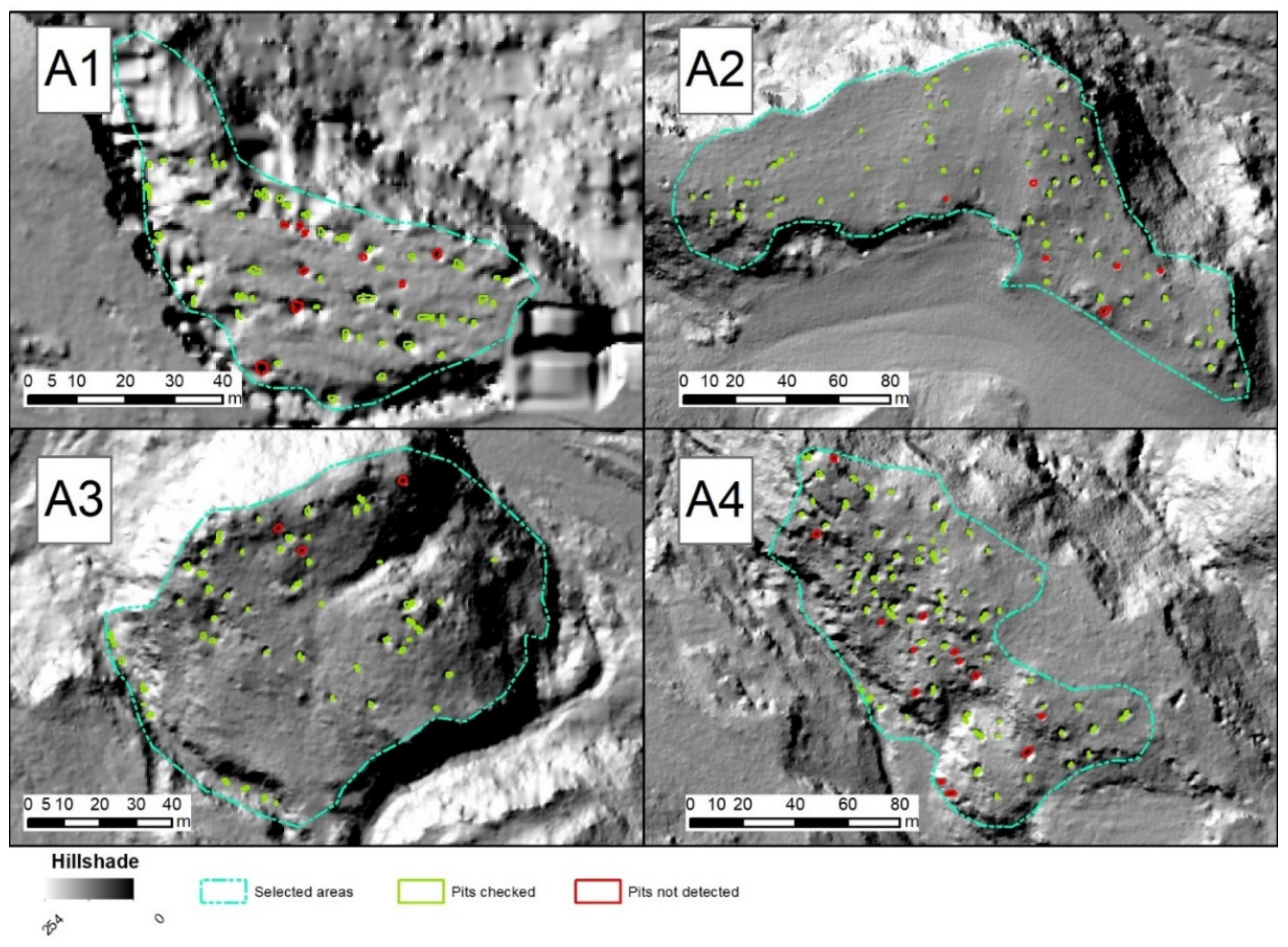
- To map and to quantify the entity of the looting phenomenon at S. Giovenale, still not investigated geographically and quantitatively. A field check was carried out by a RTK GPS survey, which allowed us to investigate the accuracy of our method based on the semi-automatic extraction of looting-related pits.
2. Materials and Methods
2.1. Case Study
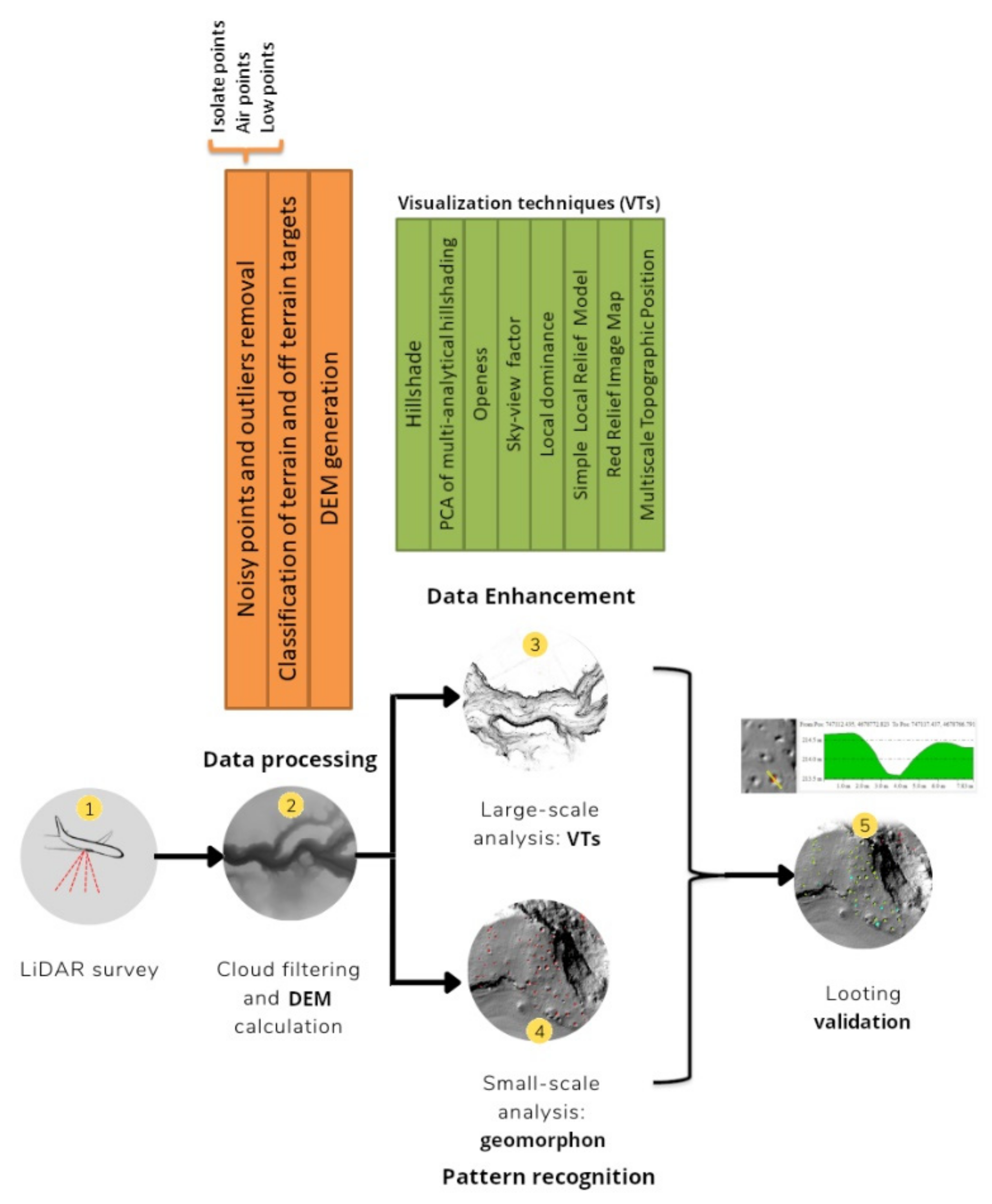
2.2. Methodological Approach
2.3. LiDAR Data Acquisition and Processing
- isolated points (when no other cloud points are present in their neighborhoods);
- air points (such as low altitude planes, birds or those points that are far higher from the nearby rough surface);
- and, finally, low points, that are the points lower than their adjacent ground LiDAR points (in the case of San Giovenale, the removal of low points have been set assuming a height lower than 0.5 m, with respect to other points within a ray of 5 m).
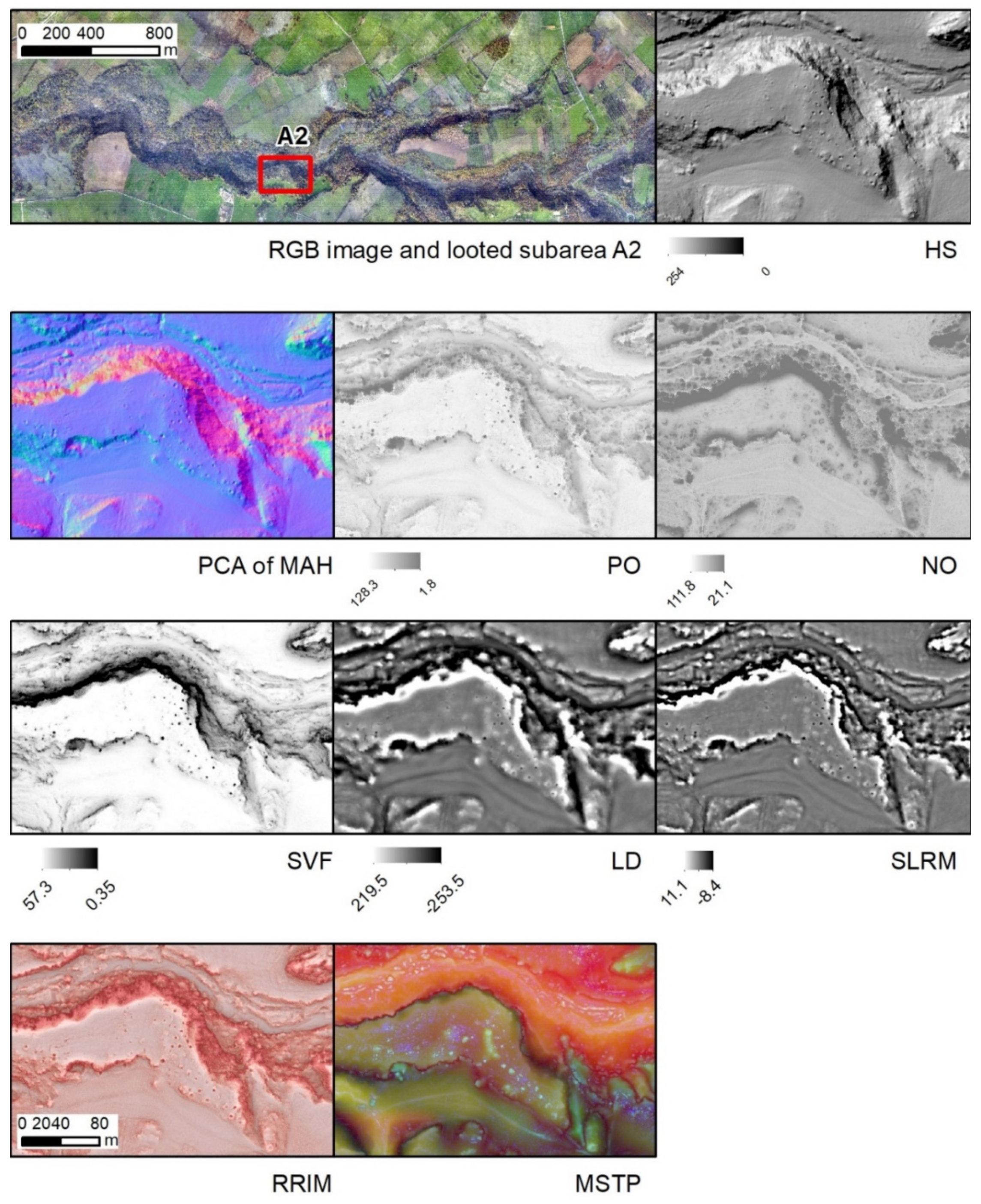
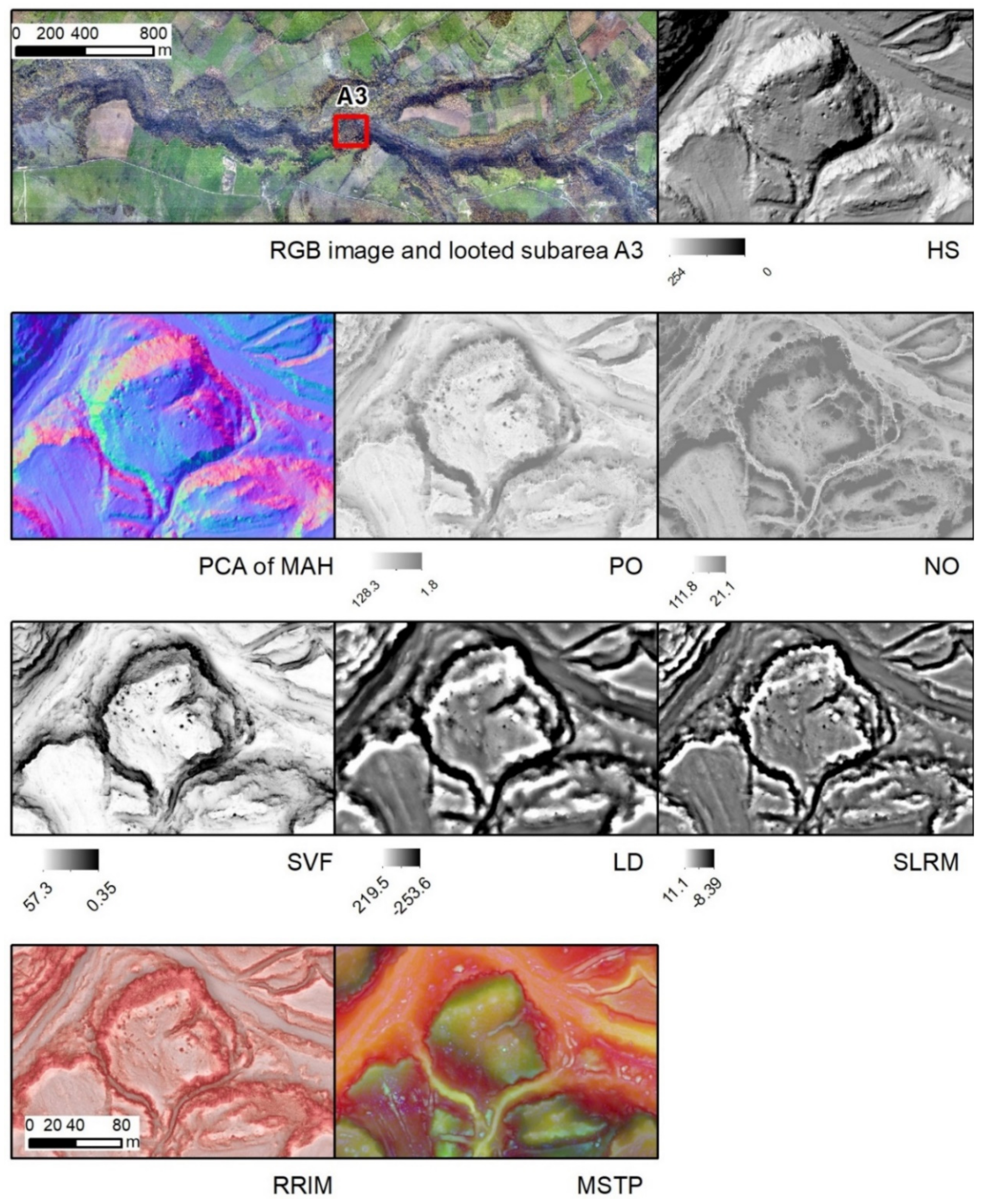
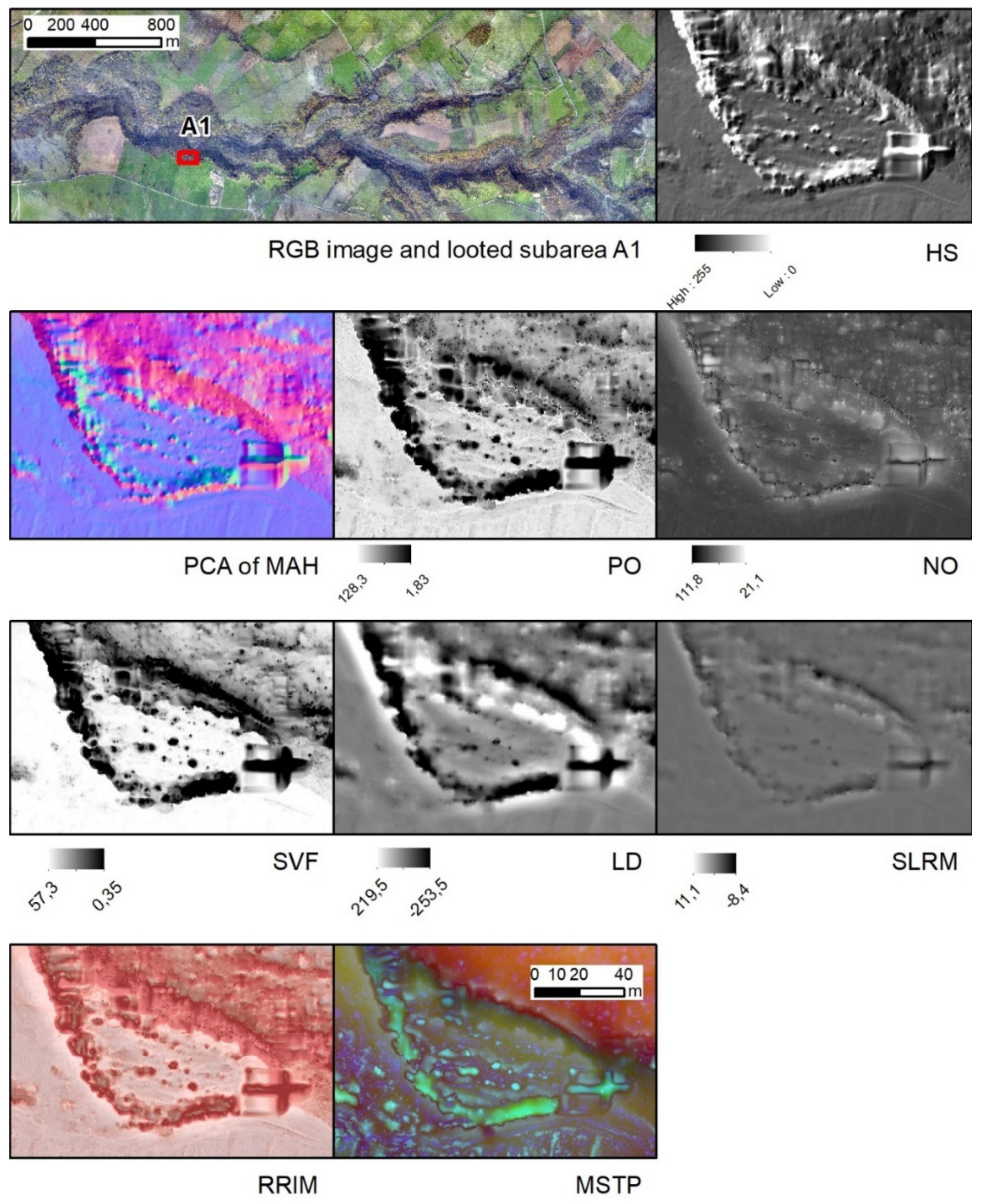
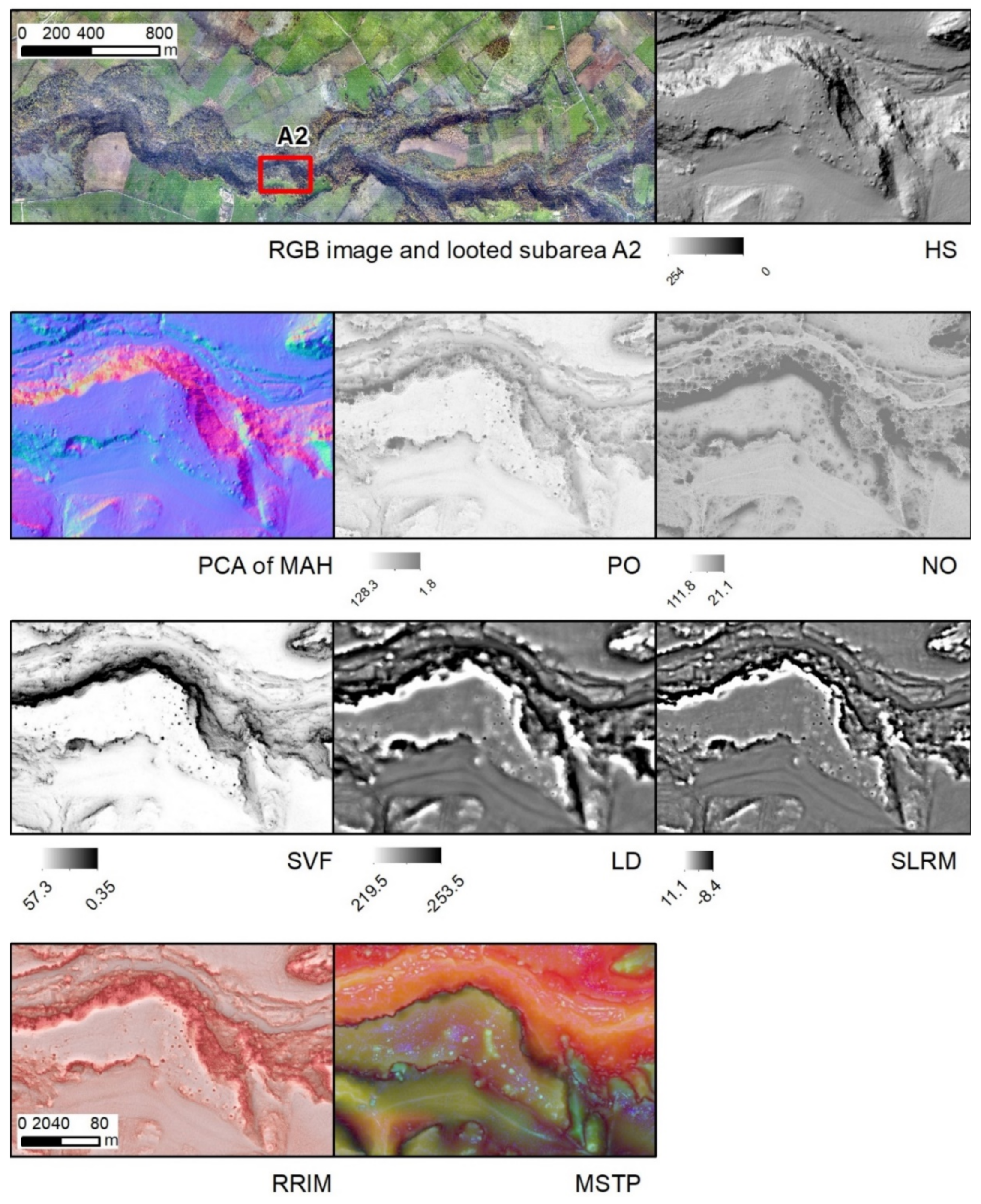
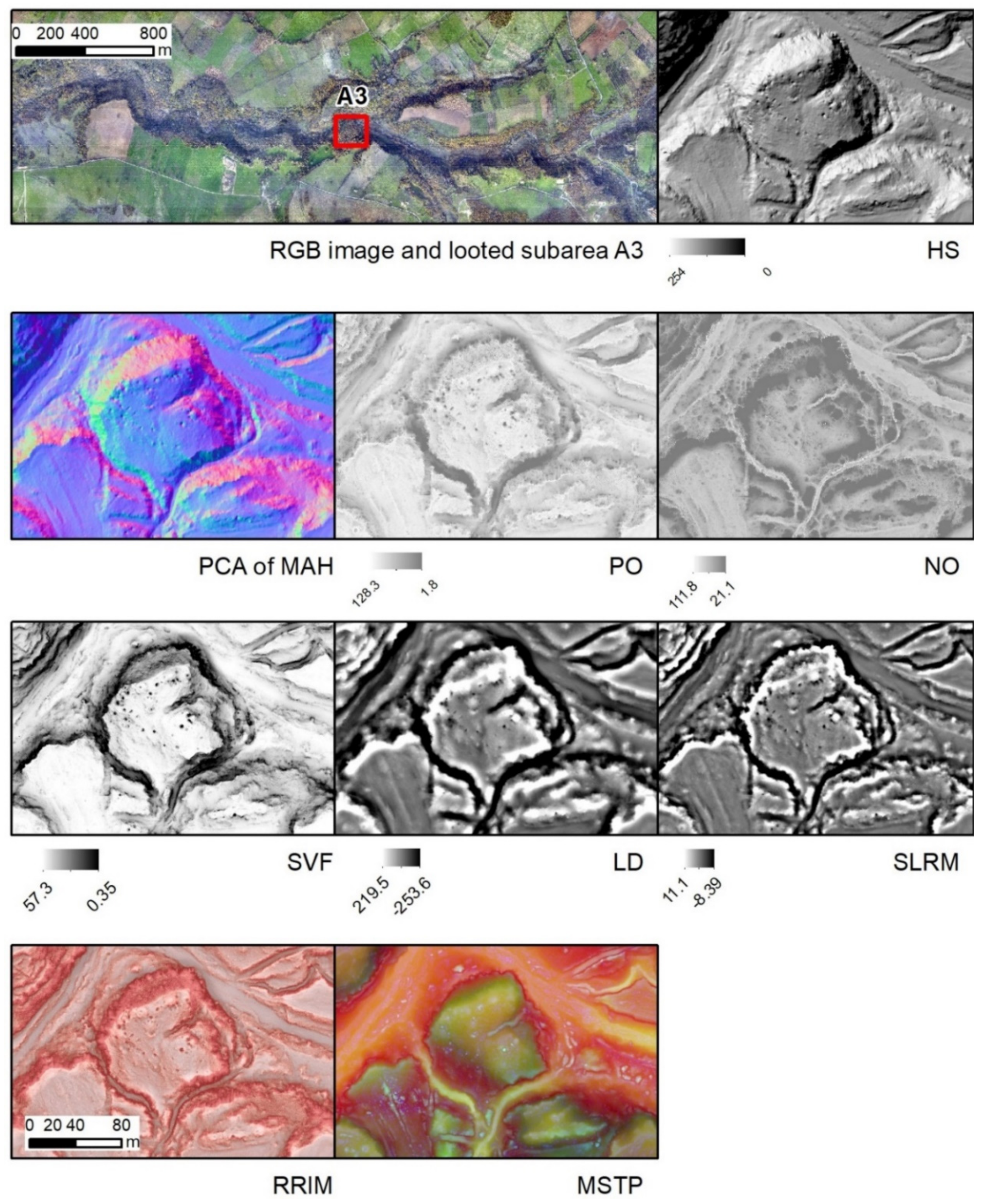
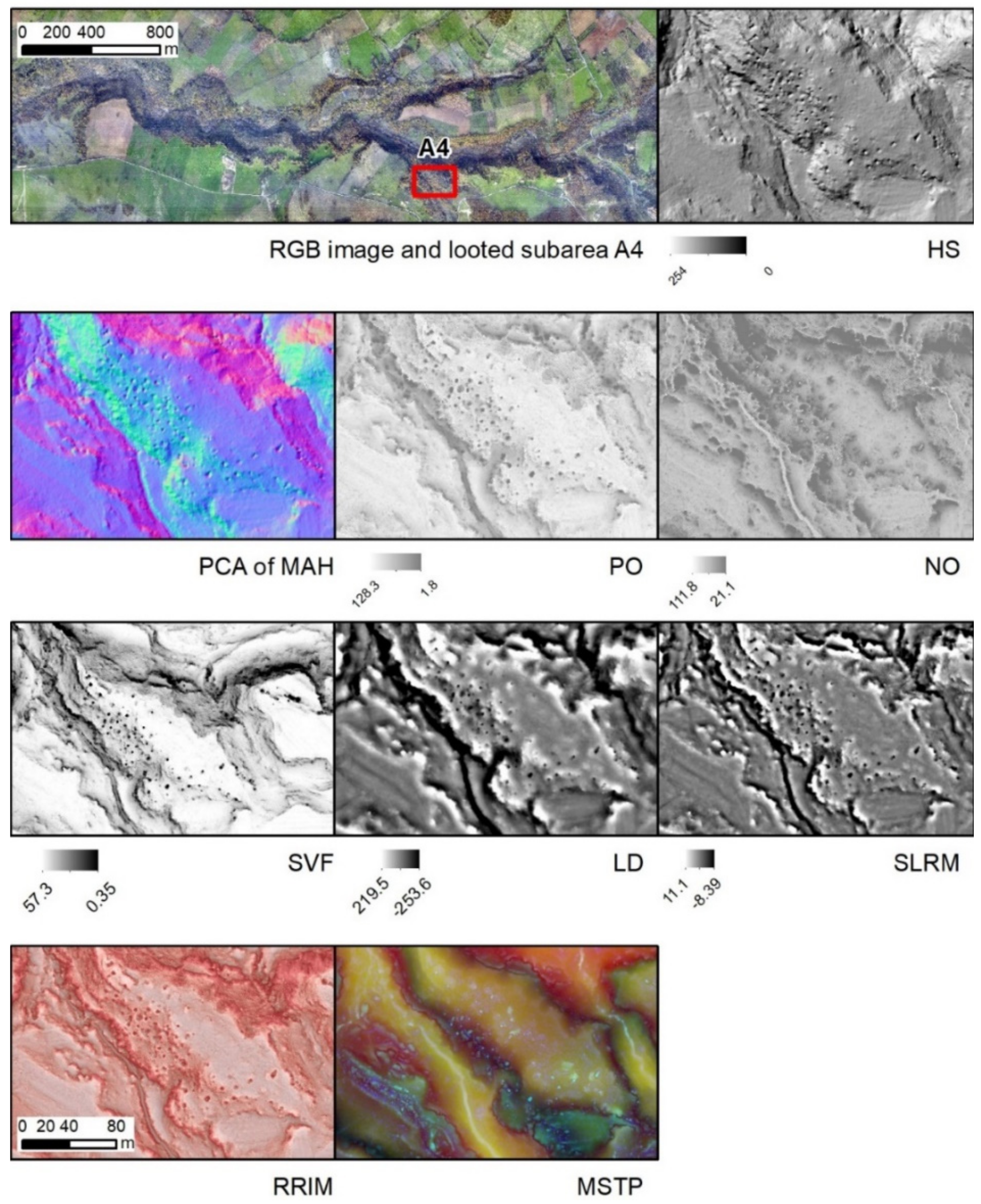
2.4. Enhancement
2.4.1. Hillshade (HS)
2.4.2. PCA of Multi-Analytical Hillshading (MAH)
2.4.3. Openness
2.4.4. Sky View Factor (SVF)
2.4.5. Local Dominance (LD)
2.4.6. Simple Local Relief Model (SLRM)
2.4.7. Red Relief Image Map (RRIM)
2.4.8. Multiscale Topographic Position (MTP)
2.5. Geomorphon Automatic Classification
3. Results
- the search radius assumed for PO, NO, SVF, SLRM and SMTP is equal to 10 pixel (px), as the dimension of bugs, that have the maximum radius equal to nearly 5 m;
- The search radial for LD needs a dimension lower and bigger than the bugs diameters to determine the dominance areas. Consequently, it has been chosen by using values found in the literature for features similar in dimension [18];
- All the other parameters are parameters consolidated in the already cited literature in Section 2.4 for each parameter.
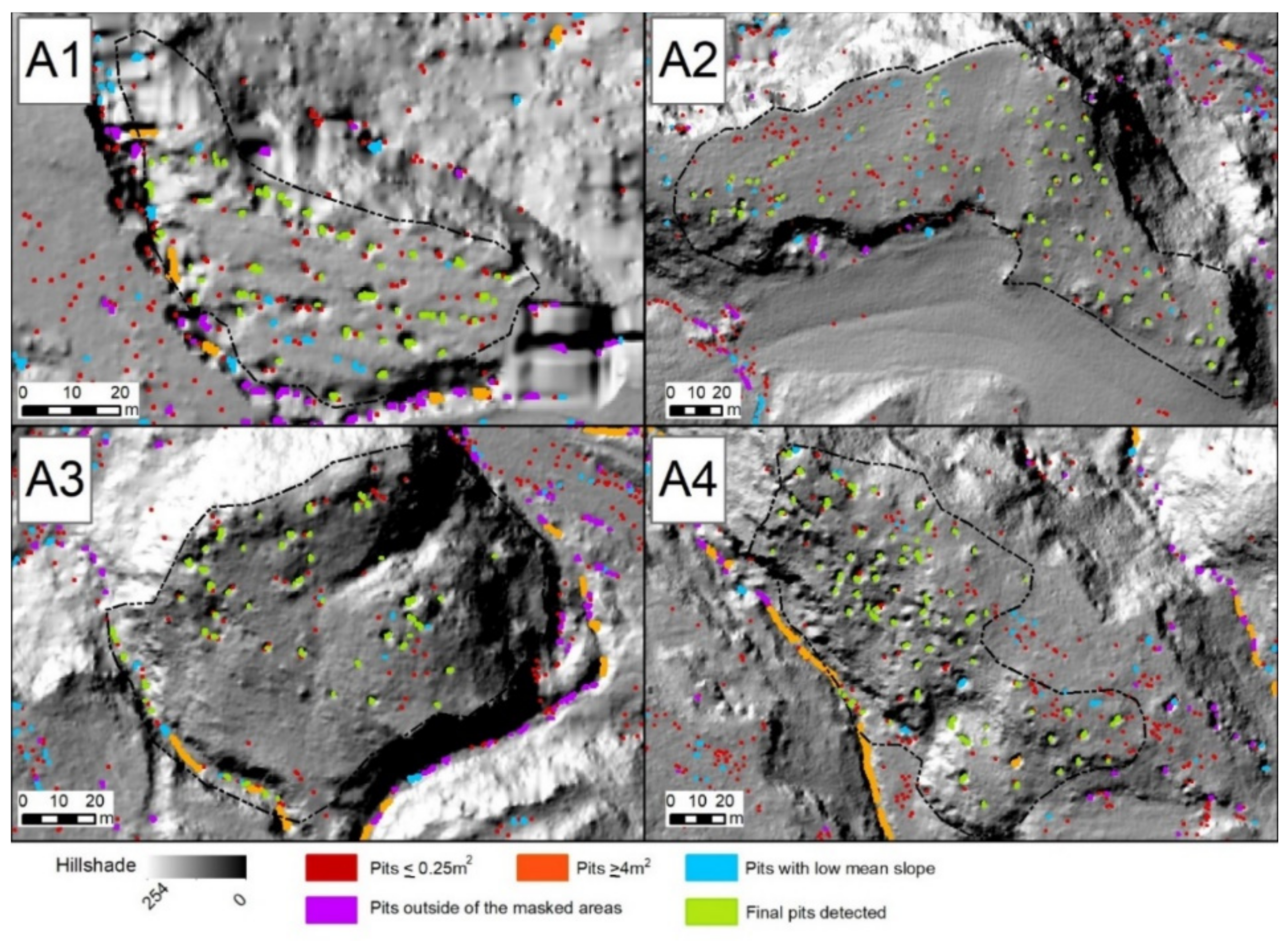
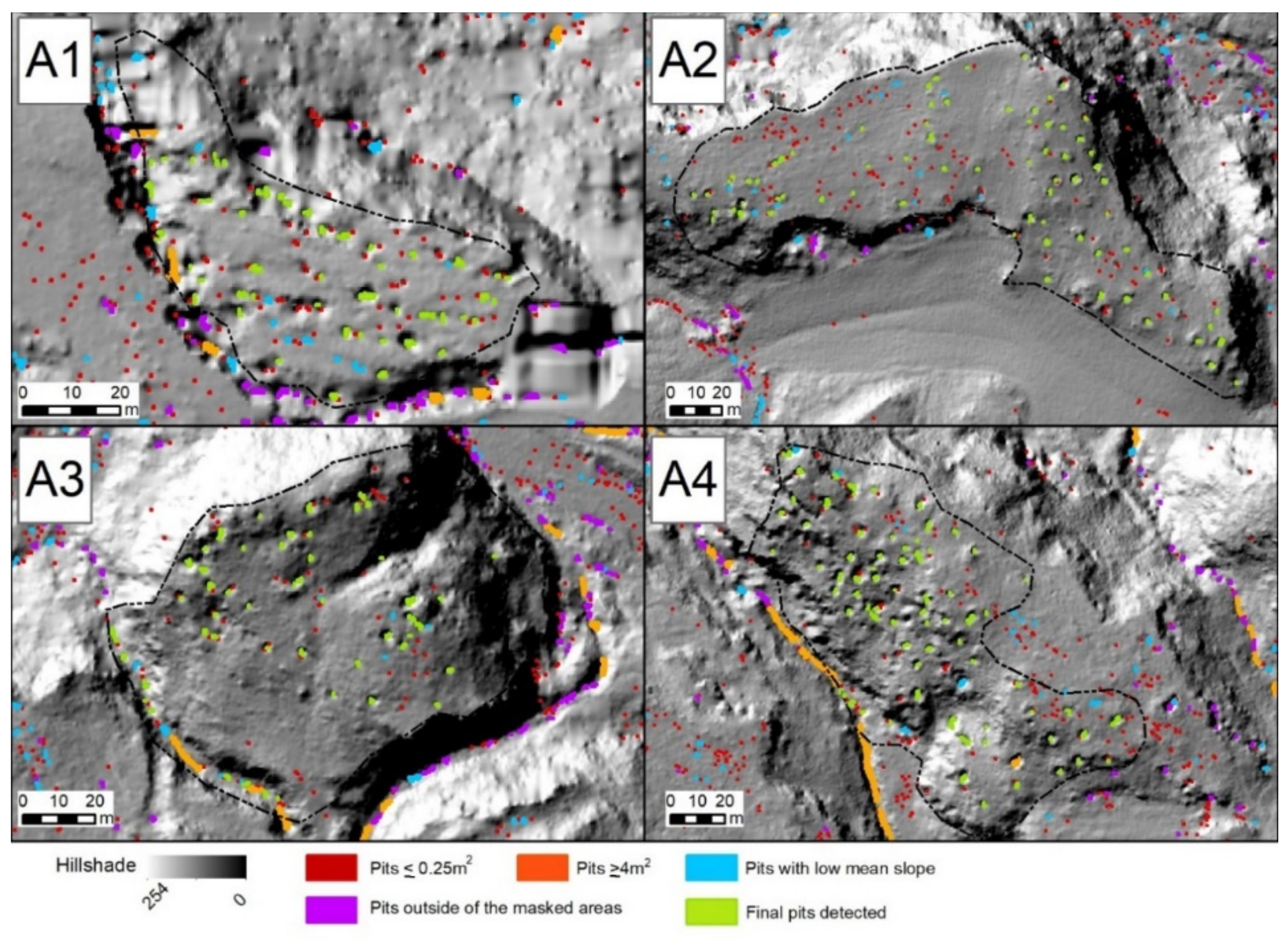
- areas lower than 0.25 m2 are excluded, as they usually do not correspond to pits;
- areas higher than 4 m2 are deleted too, as they reveal a different type of morphological feature, not related to human excavation practice;
- with zonal statistics, the mean slope of features was calculated and classified in five quantiles. Considering the particular morphology of pits, features having a mean slope falling in the first of these five quantiles represents topographic features related to geomorphological processes, or, in rare cases, old pits nowadays eroded and quite disappeared;
- from the VTs it was possible to individualize four areas, characterized by a well-delimited morphology and by a huge density of pits. These four areas were drawn with visual inspection and used to mask the final pits.
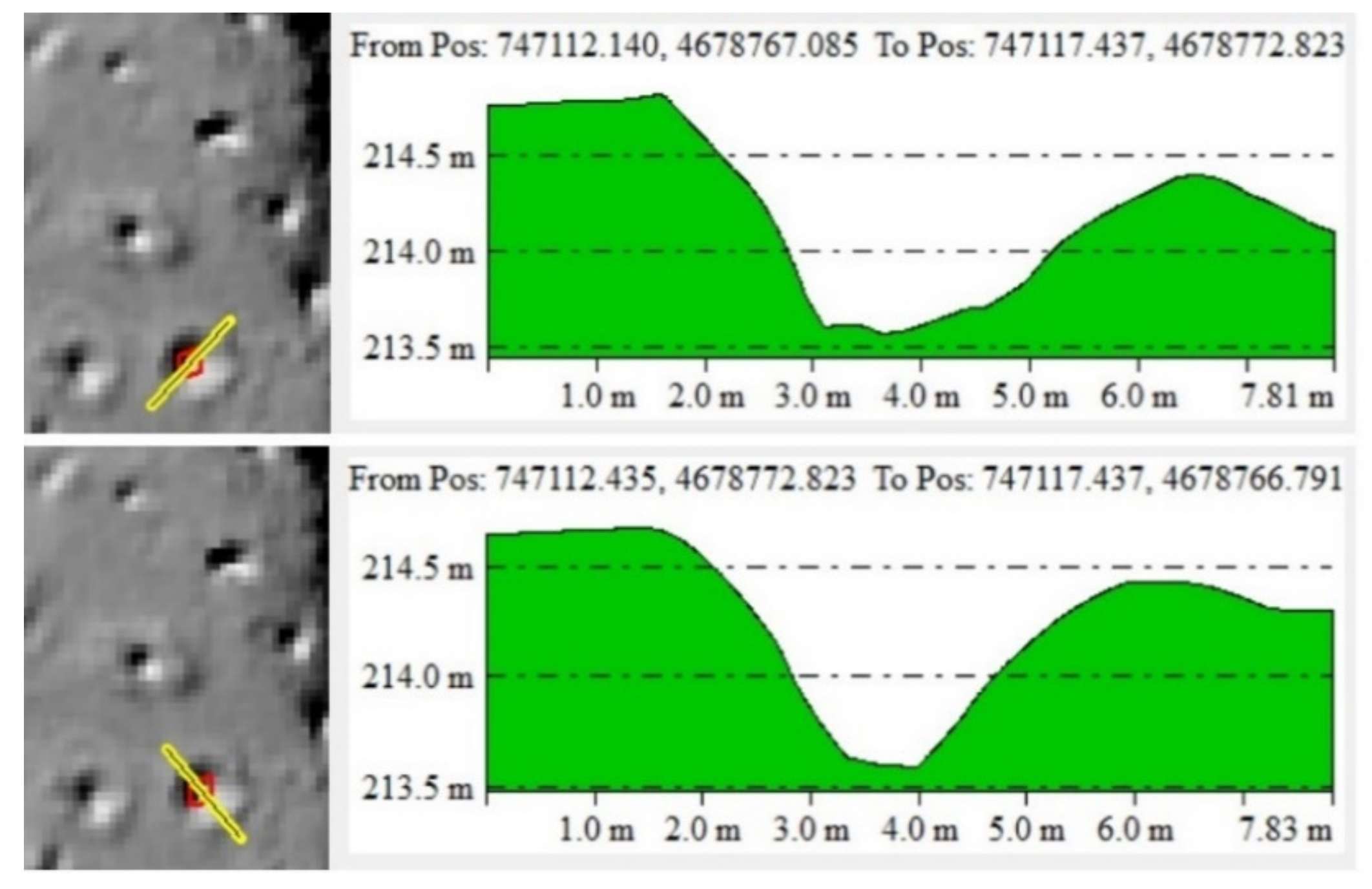
- exploiting the enhancement of VTs
- controlling the profile of each extracted element in order to control its morphology, as illustrated in Figure 9, along the main pit axes.
4. Discussion
5. Conclusions
- A first aim should be to replicate the approach presented in this paper in other archaeological locations, in order to better validate it and its effectiveness;
- It would be interesting to conduct a direct and empirical comparison between machine learning methods applied to looting extraction, and the analysis with VTs plus Geomorphon, as this is completely missing in the literature;
- Finally, more efforts could be made regarding the combination of Geomorphon with machine learning, to improve the automation of the process of pattern recognition.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Proulx, B.B. Archaeological Site Looting in “Glocal” Perspective: Nature, Scope, and Frequency. Am. J. Archaeol. 2013, 117, 111–125. [Google Scholar] [CrossRef] [Green Version]
- Yates, D. Illicit Cultural Property from Latin America: Looting, Trafficking, and Sale. In Countering Illicit Traffic in Cultural Goods: The Global Challenge of Protecting the World’s Heritage; Desmarais, F., Ed.; ICOM: Paris, France, 2015. [Google Scholar]
- Alva, W. The Destruction, Looting and Traffic of the Archaeological Heritage of Peru. In Trade in Illicit Antiquities: The Destruction of the World’s Archaeological Heritage; Brodie, N., Doole, J., Renfrew, C., Eds.; McDonald Institute: Cambridge, UK, 2001; pp. 89–96. [Google Scholar]
- Lasaponara, R.; Danese, M.; Masini, N. Satellite-Based Monitoring of Archaeological Looting in Peru. In Satellite Remote Sensing: A New Tool for Archaeology; Lasaponara, R., Masini, N., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 177–193. [Google Scholar]
- Pastore, G. The Looting of Archaeological Sites in Italy. In Trade in Illicit Antiquities: The Destruction of the World’s Archaeological Heritage; Brodie, N., Doole, J., Renfrew, C., Eds.; McDonald Institute for Archaeological Research: Cambridge, UK, 2001; pp. 89–96. [Google Scholar]
- Stone, E.C. Patterns of looting in southern Iraq. Antiquity 2008, 82, 125–138. [Google Scholar] [CrossRef]
- Casana, J.; Panahipour, M. Satellite-Based Monitoring of Looting and Damage to Archaeological Sites in Syria. J. East. Mediterr. Archaeol. Herit. Stud. 2014, 2, 128–151. [Google Scholar] [CrossRef]
- Agapiou, A. Remote sensing heritage in a petabyte-scale: Satellite data and heritage Earth Engine© applications. Int. J. Digit. Earth 2017, 10, 85–102. [Google Scholar] [CrossRef] [Green Version]
- Lasaponara, R.; Masini, N. Space-Based Identification of Archaeological Illegal Excavations and a New Automatic Method for Looting Feature Extraction in Desert Areas. Surv. Geophys. 2018, 39, 1323–1346. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F.; Drake, J.B.; Shrestha, R.L.; Slatton, K.C.; Awe, J.J.; Carter, W.E. Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize. J. Archaeol. Sci. 2011, 38, 387–398. [Google Scholar] [CrossRef]
- De Matos Machado, R.; Amat, J.P.; Arnaud-Fassetta, G.; Bétard, F. Potentialités de l’outil LiDAR pour cartographier les vestiges de la Grande Guerre en milieu intra-forestier (bois des Caures, forêt domaniale de Verdun, Meuse). EchoGéo 2016, 38, 1–22. [Google Scholar] [CrossRef]
- Masini, N.; Gizzi, F.T.; Biscione, M.; Fundone, V.; Sedile, M.; Sileo, M.; Pecci, A.; Lacovara, B.; Lasaponara, R. Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy. Remote Sens. 2018, 10, 1598. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez González, E.; Paniego Díaz, P.; Celestino Pérez, S. Lost Landscape: A Combination of LiDAR and APSFR Data to Locate and Contextualize Archaeological Sites in River Environments. Remote Sens. 2021, 13, 3506. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models—A new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Mayoral, A.; Toumazet, J.-P.; Simon, F.-X.; Vautier, F.; Peiry, J.-L. The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping. Remote Sens. 2017, 9, 120. [Google Scholar] [CrossRef] [Green Version]
- Character, L.; Ortiz, A., Jr.; Beach, T.; Luzzadder-Beach, S. Archaeologic machine learning for shipwreck detection using lidar and sonar. Remote Sens. 2021, 13, 1759. [Google Scholar] [CrossRef]
- Stott, D.; Kristiansen, S.M.; Sindbæk, S.M. Searching for viking age fortresses with automatic landscape classification and feature detection. Remote Sens. 2019, 11, 1881. [Google Scholar] [CrossRef] [Green Version]
- Berganzo-Besga, I.; Orengo, H.A.; Lumbreras, F.; Carrero-Pazos, M.; Fonte, J.; Vilas-Estévez, B. Hybrid MSRM-based deep learning and multitemporal sentinel 2-based machine learning algorithm detects near 10k archaeological tumuli in North-Western Iberia. Remote Sens. 2021, 13, 4181. [Google Scholar] [CrossRef]
- Guyot, A.; Lennon, M.; Hubert-Moy, L. Objective comparison of relief visualization techniques with deep CNN for archaeology. J. Archaeol. Sci. Rep. 2021, 38, 103027. [Google Scholar] [CrossRef]
- Verschoof-van der Vaart, W.B.; Lambers, K.; Kowalczyk, W.; Bourgeois, Q.P.J. Combining Deep Learning and Location-Based Ranking for Large-Scale Archaeological Prospection of LiDAR Data from the Netherlands. ISPRS Int. J. Geo-Inf. 2020, 9, 293. [Google Scholar] [CrossRef]
- Bundzel, M.; Jaščur, M.; Kováč, M.; Lieskovský, T.; Sinčák, P.; Tkáčik, T. Semantic segmentation of airborne lidar data in maya archaeology. Remote Sens. 2020, 12, 3685. [Google Scholar] [CrossRef]
- Albrecht, C.M.; Fisher, C.; Freitag, M.; Hamann, H.F.; Pankanti, S.; Pezzutti, F.; Rossi, F. Learning and Recognizing Archeological Features from LiDAR Data. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 5630–5636. [Google Scholar]
- Davis, D.S.; Caspari, G.; Lipo, C.P.; Sanger, M.C. Deep learning reveals extent of Archaic Native American shell-ring building practices. J. Archaeol. Sci. 2021, 132, 105433. [Google Scholar] [CrossRef]
- Davis, D.S.; Sanger, M.C.; Lipo, C.P. Automated mound detection using lidar and object-based image analysis in Beaufort County, South Carolina. Southeast. Archaeol. 2019, 38, 23–37. [Google Scholar] [CrossRef]
- Danese, M.; Lasaponara, R.; Masini, N. Spatial analysis and Lidar data for the extraction of archaeological features: The Etruscan site of San Giovenale, Blera (Lazio). In Proceedings of the 2020 IMEKO TC-4 International Conference on Metrology for Archaeology and Cultural Heritage, Trento, Italy, 22–24 October 2020; pp. 160–163. [Google Scholar]
- Gioia, D.; Danese, M.; Corrado, G.; Di Leo, P.; Minervino Amodio, A.; Schiattarella, M. Assessing the prediction accuracy of geomorphon-based automated landform classification: An example from the ionian coastal belt of southern Italy. ISPRS Int. J. Geo-Inf. 2021, 10, 725. [Google Scholar] [CrossRef]
- Boethius, A.; Sahlin Nils, G. Etruscan Culture: Land and People: Archaeological Research and Studies Conducted in San Giovenale and Its Environs by Members of the Swedish Institute in Rome; Columbia University Press: New York, NY, USA; Allhem Pub. House: Malmoe, Sweden, 1962. [Google Scholar]
- Thomasson, B. San Giovenale 1:1. In General Introduction ActaRom-4o, 26:1:1; ESCI: Stockholm, Sweden, 1972; Volume 26. [Google Scholar]
- Pohl, I. San Giovenale 5:2. The Borgo. The Etruscan habitation quarter on the north-west slope. Stratification and materials. In ActaRom-4, XXVI, 2; ESCI: Stockholm, Sweden, 2009; p. 262. [Google Scholar]
- Lasaponara, R.; Masini, N.; Holmgren, R.; Backe Forsberg, Y. Integration of aerial and satellite remote sensing for archaeological investigations: A case study of the Etruscan site of San Giovenale. J. Geophys. Eng. 2012, 9, S26–S39. [Google Scholar] [CrossRef]
- Hu, B.; Gumerov, D.; Wang, J.; Zhang, W. An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data. Remote Sens. 2017, 9, 871. [Google Scholar] [CrossRef] [Green Version]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33, 110–117. [Google Scholar]
- Challis, K.; Forlin, P.; Kincey, M. A Generic Toolkit for the Visualization of Archaeological Features on Airborne LiDAR Elevation Data. Archaeol. Prospect. 2011, 18, 279–289. [Google Scholar] [CrossRef]
- Štular, B.; Kokalj, Ž.; Oštir, K.; Nuninger, L. Visualization of lidar-derived relief models for detection of archaeological features. J. Archaeol. Sci. 2012, 39, 3354–3360. [Google Scholar] [CrossRef]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A. A Comparison of Visualization Techniques for Models Created from Airborne Laser Scanned Data. Archaeol. Prospect. 2012, 19, 41–48. [Google Scholar] [CrossRef]
- Doneus, M. Openness as Visualization Technique for Interpretative Mapping of Airborne Lidar Derived Digital Terrain Models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef] [Green Version]
- Imhof, E. Cartographic Relief Presentation; Esri Press: Redlands, CA, USA, 1982. [Google Scholar]
- Hanus, K. The applications of airborne laser scanning in archaeology. Stud. Anc. Art Civiliz. 2012, 16, 233–248. [Google Scholar]
- Crutchley, S.; Crow, P. The light fantastic. Using air borne LiDAR in archaeological survey. In Proceedings of the ISPRS TC VII Symposium, Vienna, Austria, 5–7 July 2010. [Google Scholar]
- Devereux, B.J.; Amable, G.S.; Crow, P. Visualisation of LiDAR terrain models for archaeological feature detection. Antiquity 2008, 82, 470–479. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shirasawa, M.; Pike, R.J. Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models. Photogramm. Eng. Remote Sens. 2002, 68, 257–265. [Google Scholar]
- Kidd, C.; Chapman, L. Derivation of sky-view factors from lidar data. Int. J. Remote Sens. 2012, 33, 3640–3652. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-View Factor as a Relief Visualization Technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef] [Green Version]
- Hesse, R. Visualisierung hochauflösender Digitaler Geländemodelle mit LiVT. In 3D-Anwendungen in der Archäologie: Computeranwendungen und quantitative Methoden in der Archäologie; Lieberwirth, U., Herzog, I., Eds.; Edition Topoi: Berlin, Germany, 2016. [Google Scholar] [CrossRef]
- Chiba, T.; Kaneta, S.I.; Suzuki, Y. Red Relief Image Map: New Visualization Method for Three Dimensional Data. In Proceedings of the XXIth ISPRS Congress, Beijing, China, 3–11 July 2008; pp. 1071–1076. [Google Scholar]
- Weiss, A.D. Topographic position and landforms analysis. In Proceedings of the ESRI International User Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- Lindsay, J.B.; Cockburn, J.M.H.; Russell, H.A.J. An integral image approach to performing multi-scale topographic position analysis. Geomorphology 2015, 245, 51–61. [Google Scholar] [CrossRef]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Atkinson, J.; de Clercq, W.; Rozanov, A. Multi-resolution soil-landscape characterisation in KwaZulu Natal: Using geomorphons to classify local soilscapes for improved digital geomorphological modelling. Geoderma Reg. 2020, 22, e00291. [Google Scholar] [CrossRef]
- Sărășan, A.; Józsa, E.; Ardelean, A.C.; Drăguț, L. Sensitivity of geomorphons to mapping specific landforms from a digital elevation model: A case study of drumlins. Area 2018, 51, 257–267. [Google Scholar] [CrossRef]
- Gioia, D.; Danese, M.; Bentivenga, M.; Pescatore, E.; Siervo, V.; Giano, S.I. Comparison of Different Methods of Automated Landform Classification at the Drainage Basin Scale: Examples from the Southern Italy. In Computational Science and Its Applications—ICCSA 2020; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; pp. 696–708. [Google Scholar]
- De Reu, J.; Bourgeois, J.; Bats, M.; Zwertvaegher, A.; Gelorini, V.; De Smedt, P.; Chu, W.; Antrop, M.; De Maeyer, P.; Finke, P.; et al. Application of the topographic position index to heterogeneous landscapes. Geomorphology 2013, 186, 39–49. [Google Scholar] [CrossRef]
- Kramm, T.; Hoffmeister, D.; Curdt, C.; Maleki, S.; Khormali, F.; Kehl, M. Accuracy Assessment of Landform Classification Approaches on Different Spatial Scales for the Iranian Loess Plateau. ISPRS Int. J. Geo-Inf. 2017, 6, 366. [Google Scholar] [CrossRef] [Green Version]
- Backe Forsberg, Y.; Holmgren, L.A.; Lasaponara, R.; Masini, N. Airborne and satellite Multispectral imagery at the Etruscan site of San Giovenale, Blera (Lazio)—Preliminary results. In Advances in Remote Sensing for Archaeology and Cultural Heritage Management; Lasaponara, R., Masini, N., Eds.; Aracne: Roma, Italy, 2008; pp. 225–228. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VT | Parameters | Software |
|---|---|---|
| HS | Sun azimuth: 315°; Sun elevation angle: 45° | QGIS |
| PCA of MAH | Sun azimuths: 16 directions; Sun elevation angle: 45°; Number of principal components: 3 | SAGA library for QGIS |
| PO | Number of search directions: 16; Search radius: 10 px | SAGA library for QGIS |
| NO | Number of search directions: 16; Search radius: 10 px | SAGA library for QGIS |
| SVF | Number of search directions: 16; Search radius: 10 px | SAGA library for QGIS |
| LD | Minimum radius: 2 px; Maximum radius: 25 px | Relief Visualization Toolbox (RVT) [53] |
| SLRM | Radius: 10 px | QGIS |
| RRIM | Blending: overlay of slope (70%) and I 30% | QGIS |
| MSTP | Micro scale (Blue): 2 to 10 px; Meso scale (Green): 12 to 1000 px; Macro scale (Red): 1200 to 2000 px | SAGA library for QGIS |
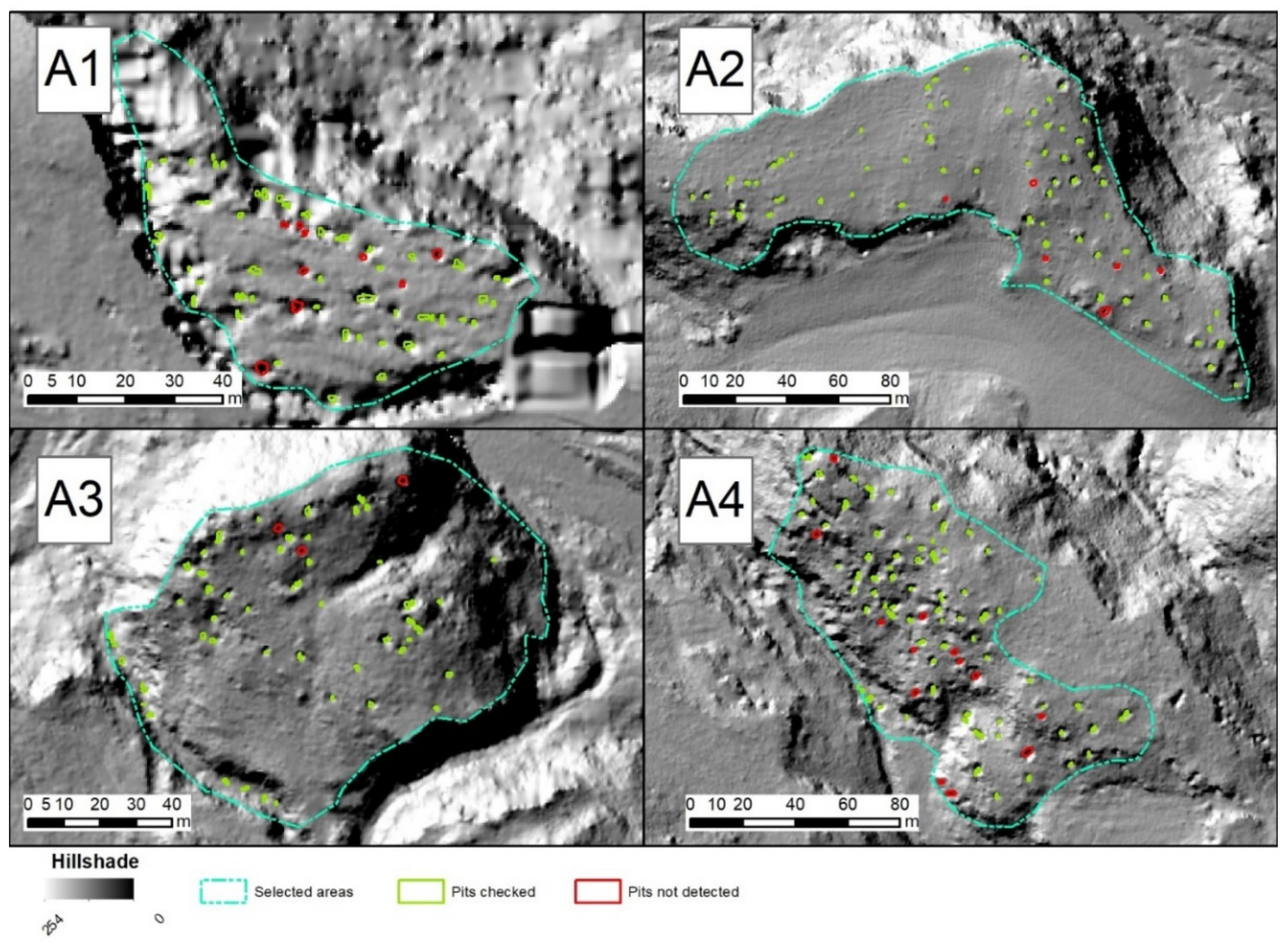
| Area | Number of Pits Checked | Number of Pits Not Detected | % of Pits Correctly Extracted |
|---|---|---|---|
| 1 | 52 | 9 | 85 |
| 2 | 72 | 6 | 92 |
| 3 | 54 | 3 | 95 |
| 4 | 83 | 11 | 88 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danese, M.; Gioia, D.; Vitale, V.; Abate, N.; Amodio, A.M.; Lasaponara, R.; Masini, N. Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site. Remote Sens. 2022, 14, 1587. https://doi.org/10.3390/rs14071587
Danese M, Gioia D, Vitale V, Abate N, Amodio AM, Lasaponara R, Masini N. Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site. Remote Sensing. 2022; 14(7):1587. https://doi.org/10.3390/rs14071587
Chicago/Turabian StyleDanese, Maria, Dario Gioia, Valentino Vitale, Nicodemo Abate, Antonio Minervino Amodio, Rosa Lasaponara, and Nicola Masini. 2022. "Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site" Remote Sensing 14, no. 7: 1587. https://doi.org/10.3390/rs14071587
APA StyleDanese, M., Gioia, D., Vitale, V., Abate, N., Amodio, A. M., Lasaponara, R., & Masini, N. (2022). Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site. Remote Sensing, 14(7), 1587. https://doi.org/10.3390/rs14071587