
Estimation of Parameters of Biomass State of Sowing Spring Wheat

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Mathematical Models
- -
- in the time interval before the earing of crops
- -
- in the time interval from the beginning of earing to the full ripening of the grain
- -
- in the time interval before the earing of crops
- -
- in the time interval from the beginning of earing to the full ripening of the grain
2.2. Estimation Algorithm
3. Results
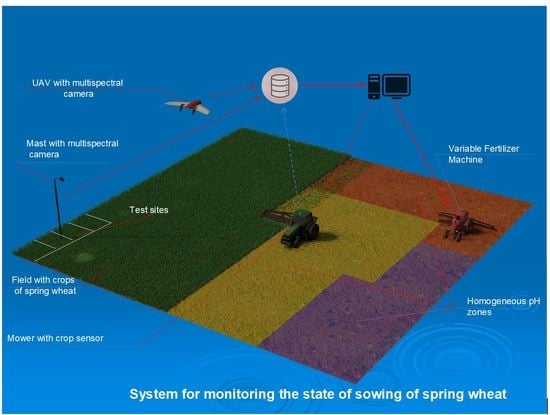
3.1. Experimental Research Base
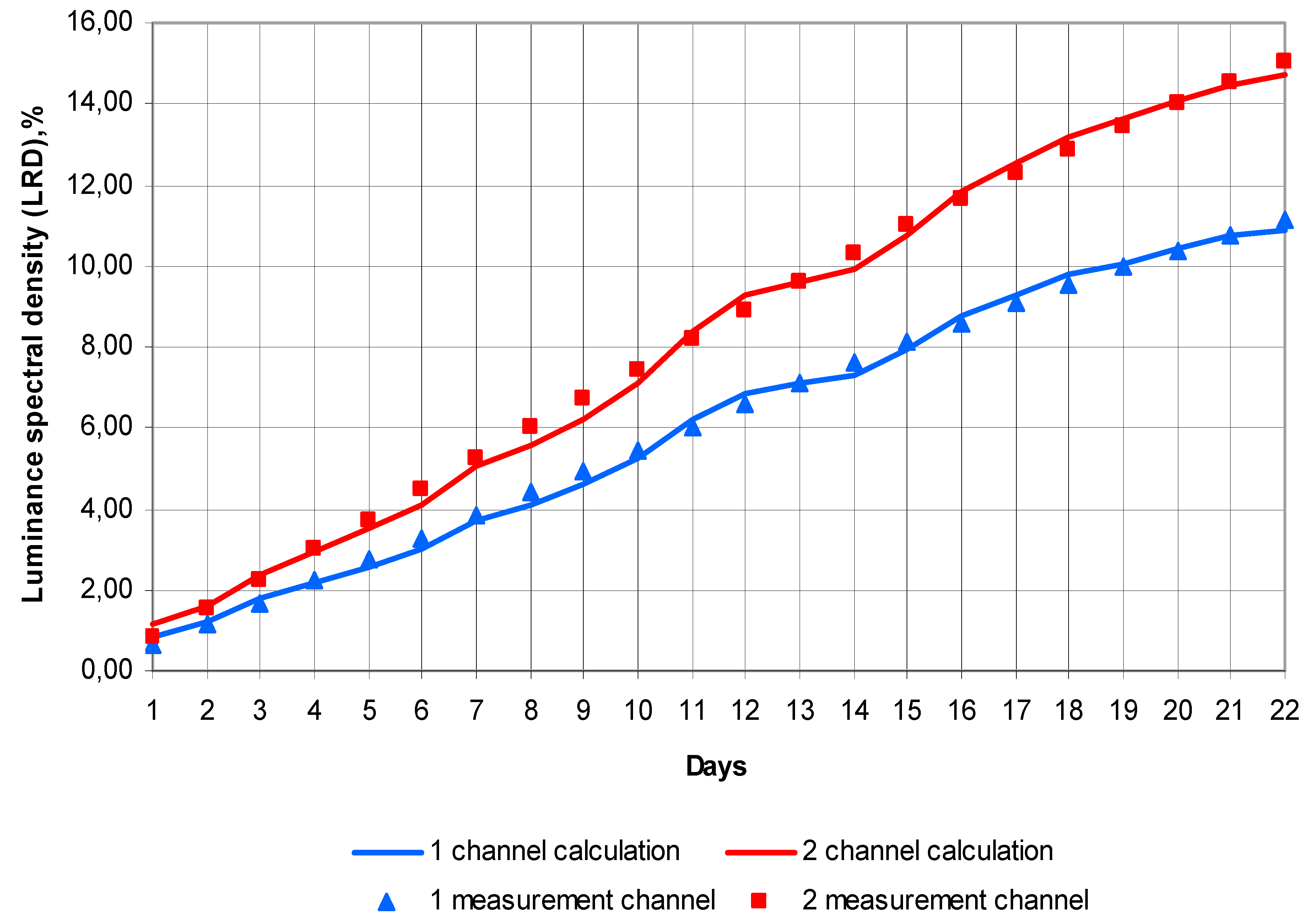
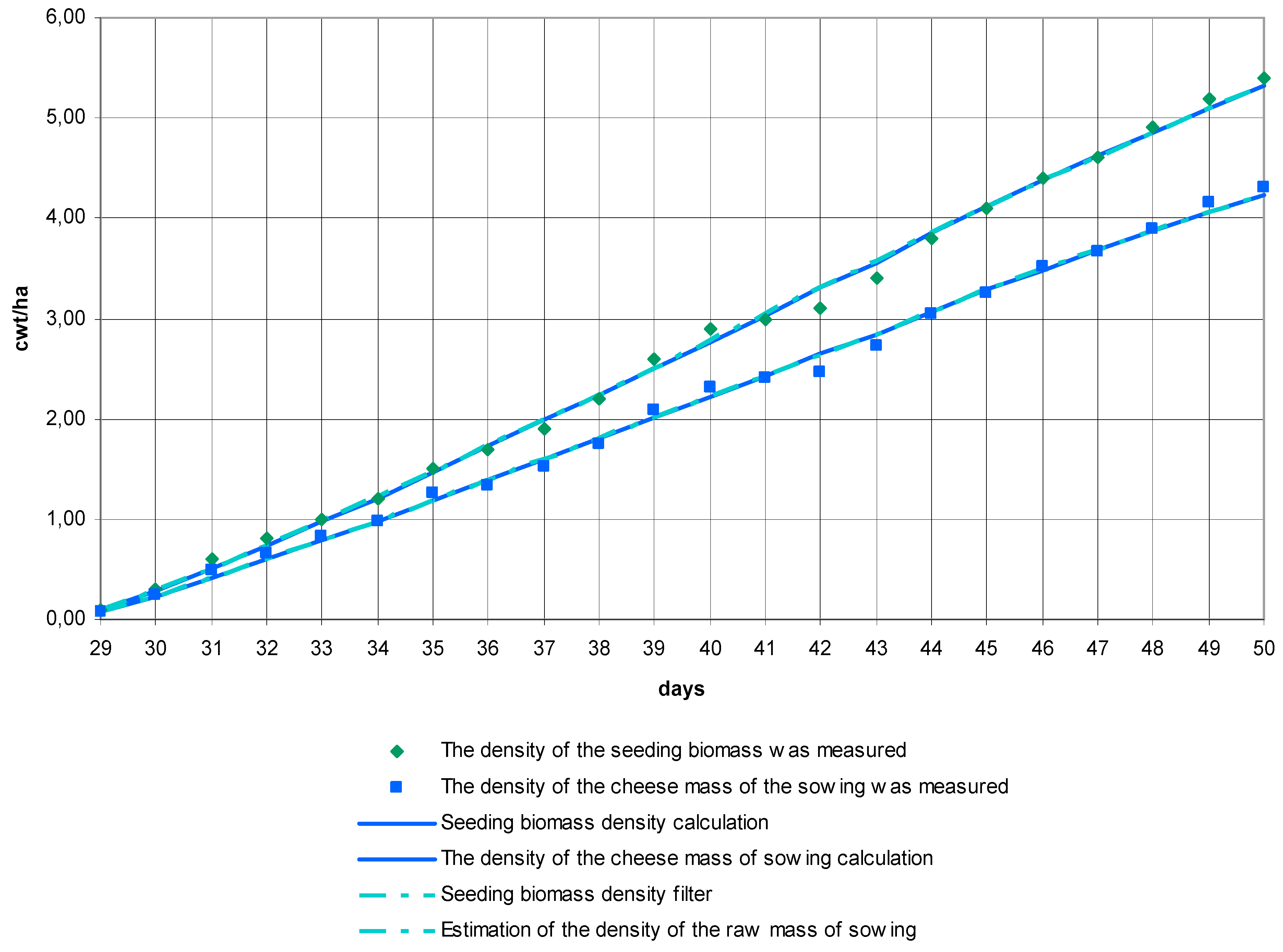
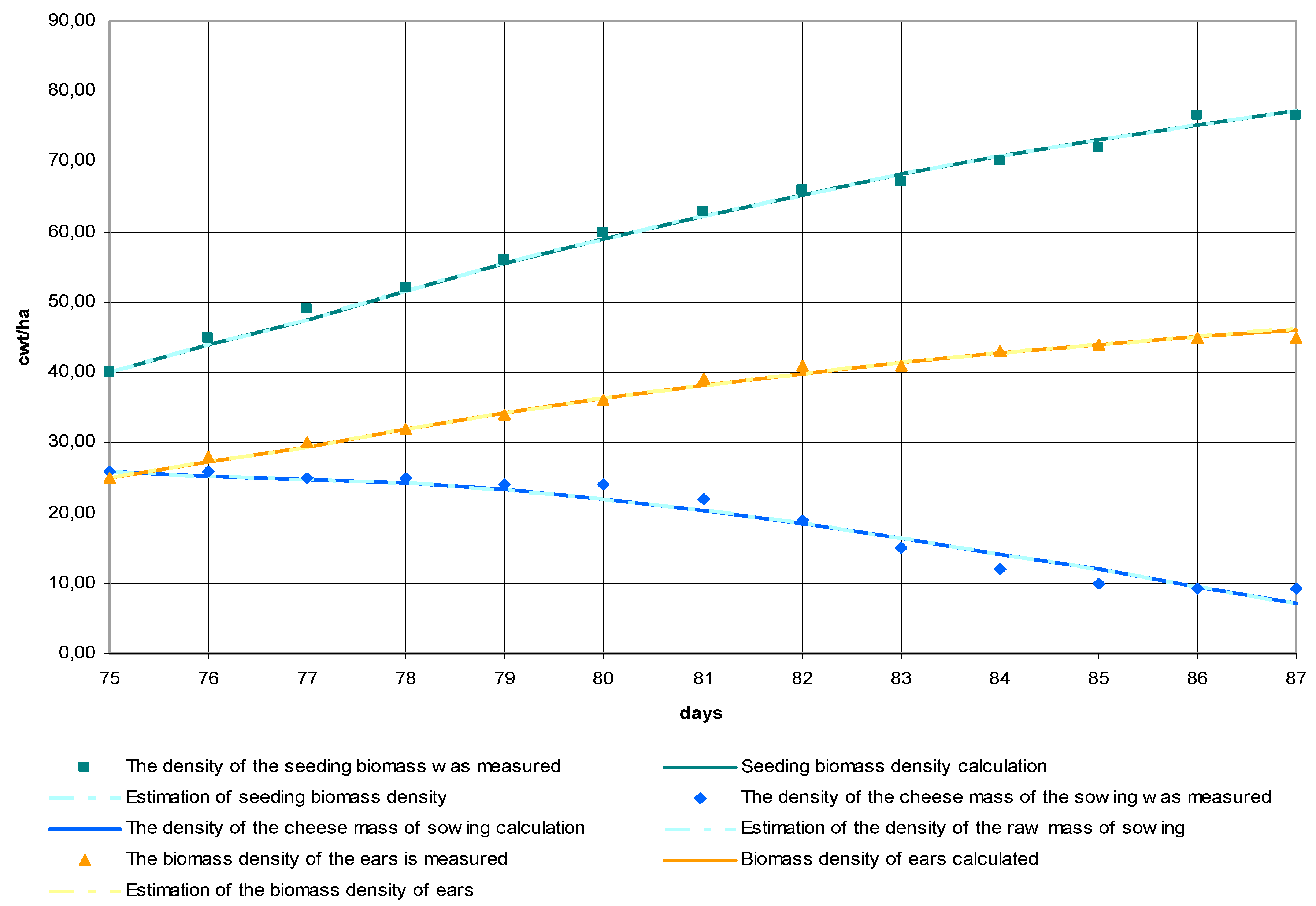
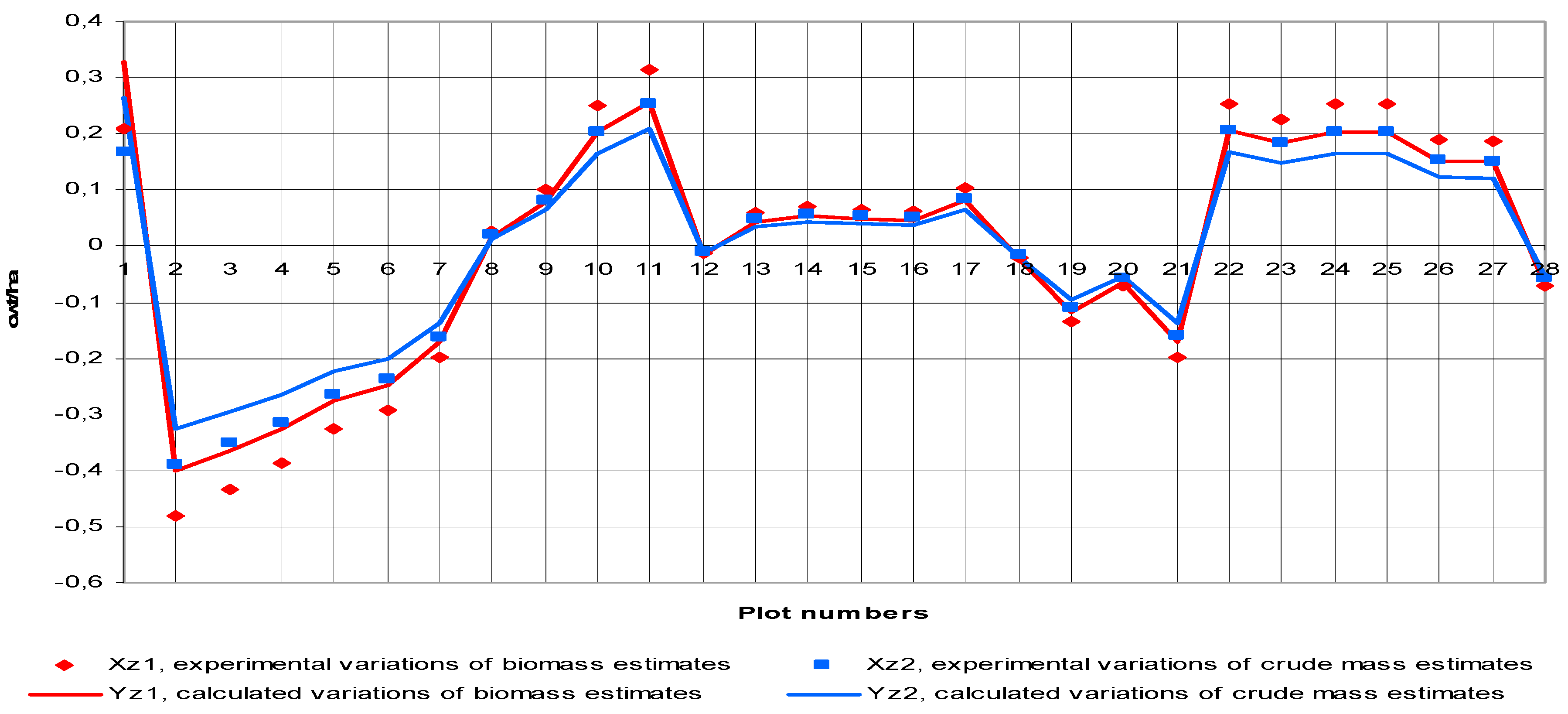
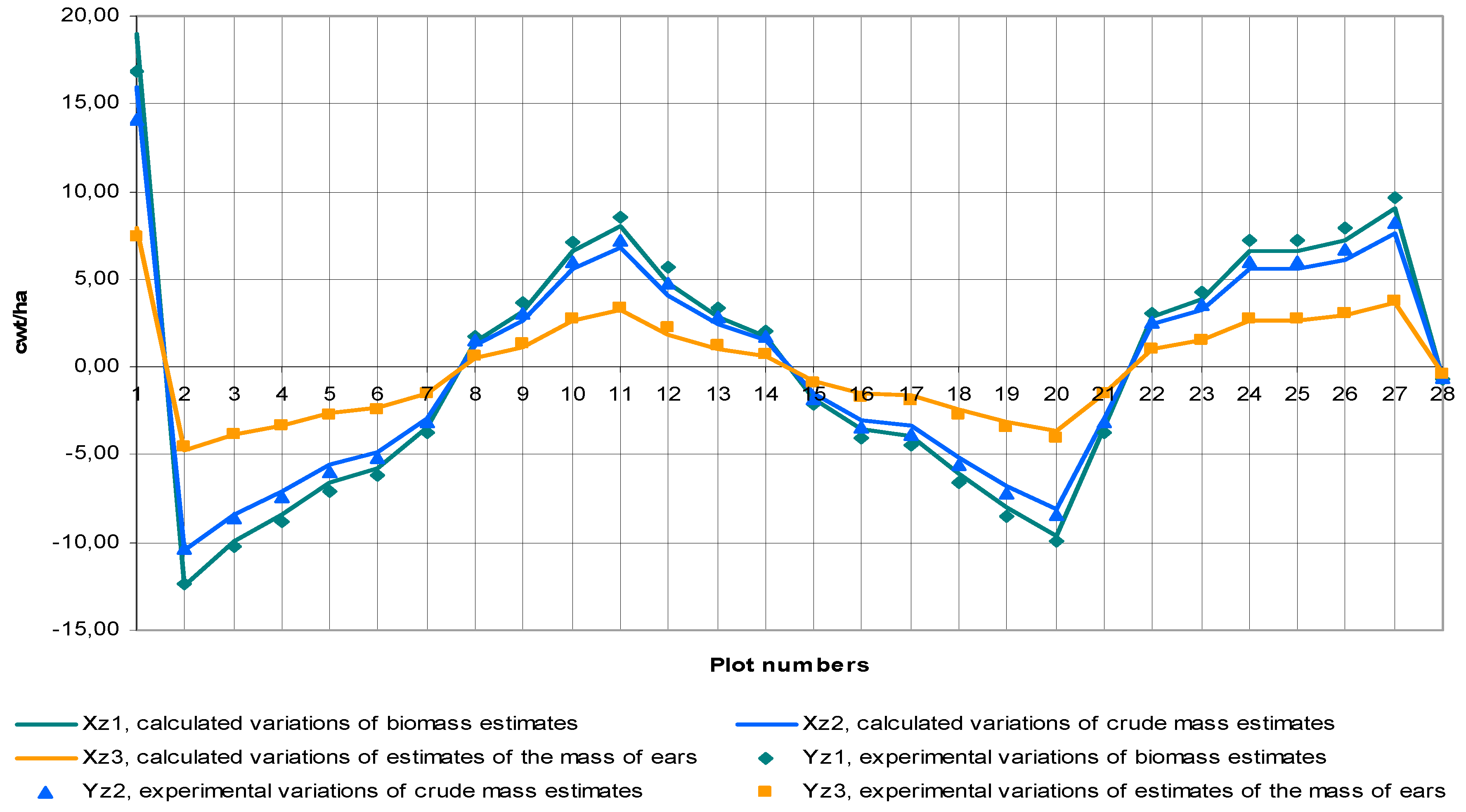
3.2. Results of Approbation of Models and Estimation Algorithms
3.3. The Discussion of the Results
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mikhailenko, I.M. Theoretical Foundations and Technical Implementation of Agricultural Technology Management; Peter the Great St. Petersburg Polytechnic University: Saint Petersburg, Russia, 2017; p. 250. [Google Scholar]
- Antonov, V.N.; Sweet, L.A. Monitoring of the state of crops and forecasting the yield of spring wheat according to remote sensing data. Geomatika 2009, 4, 50–53. [Google Scholar]
- Bartalev, S.A.; Lupyan, E.A.; Neishtadt, I.A.; Savin, I.Y. Classification of certain types of agricultural crops in the southern regions of Russia according to MODIS satellite data. Explor. Earth Space 2006, 3, 68–75. [Google Scholar]
- Kochubey, S.M.; Shadchina, T.M.; Kobets, N.I. Spectral Properties of Plants as the Basis of Remote Diagnostic Methods; Naukova Dumka: Kyiv, Ukraine, 1990; p. 134. [Google Scholar]
- Marchukov, V.S. Theory and Methods of Thematic Processing of Aerospace Images Based on Multi-Level Segmentation; Geodesy and Cartography: Moscow, Russia, 2011; p. 27. [Google Scholar]
- Rachkulik, V.I.; Sitnikova, M.V. Reflective Properties and Condition of the Vegetation Cover; Gidrometeoizdat: Leningrad, Russia, 1981; p. 287. [Google Scholar]
- Sims, D.A.; Gamon, J.A. Relationships between Leaf Pigment Content and Spectral Reflectance Across a Wide Range of Species, Leaf Structures and Developmental Stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Ponzoni, F.J.; Borges da Silva, C.; Benfica dos Santos, S.; Montanher, O.C.; Batista dos Santos, T. Local Illumination Influence on Vegetation Indices and Plant Area Index (PAI) Relationships. Remote Sens. 2014, 6, 6266–6282. [Google Scholar] [CrossRef] [Green Version]
- Crippen, R.E. Calculating the Vegetation Index Faster. Remote Sens. Environ. 1990, 34, 71–73. [Google Scholar] [CrossRef]
- Mikhailenko, I.M.; Timoshin, V.N. Decision-making on the date of harvesting feed based on data from remote sensing of the Earth and tuned mathematical models. Mod. Prob. Remote Sens. Earth Space 2018, 15, 164–175. [Google Scholar] [CrossRef]
- Mikhailenko, I.M. Assessment of crop and soil state using satellite remote sensing data. Int. J. Inf. Technol. Oper. Manag. 2013, 1, 41–51. [Google Scholar]
- Kazakov, I.E. Methods for Optimizing Stochastic Systems; Nauka: Moscow, Russia, 1987; p. 349. [Google Scholar]
- Datt, B. A New Reflectance Index for Remote Sensing of Chlorophyll Content in Higher Plants: Tests Using Eucalyptus Leaves. J. Plant Phys. 1999, 1, 30–36. [Google Scholar] [CrossRef]
- Gamon, J.A.; Serrano, L.; Surfus, J.S. The Photochemical Reflectance Index: An Optical Indicator of Photosynthetic Radiation Use Efficiency across Species, Functional Types and Nutrient Levels. Ecologia 1997, 4, 492–501. [Google Scholar] [CrossRef]
- Penuelas, J.; Baret, F.; Filella, I. Semi-Empirical Indices to Assess Carotenoids/Chlorophyll-a Ratio from Leaf Spectral Reflectance. Photosynthetica 1995, 31, 221–230. [Google Scholar]
- Mikhailenko, I.M.; Timoshin, V.N. Management of sowing dates according to remote sensing of the Earth. Mod. Prob. Remote Sens. Earth Space 2017, 14, 178–189. [Google Scholar] [CrossRef]
- Eikhoff, P. Modern Methods of Identification of Systems; Eikhoff, P., Ed.; Mir: Moscow, Russia, 1983; p. 436. [Google Scholar]
- Mikhailenko, I.M. The main tasks of assessing the state of crops and soil environment according to space sensing data. Environ. Syst. Dev. 2011, 8, 17–25. [Google Scholar]
- Mikhailenko, I.M.; Timoshin, V.N. Mathematical modeling and assessment of the chemical state of the soil environment according to remote sensing of the Earth. Int. Res. J. 2018, 9, 26–38. [Google Scholar] [CrossRef]
- Mikhailenko, I.M.; Timoshin, V.N. Assessment of the chemical state of the soil medium according to remote sensing of the Earth. Mod. Prob. Remote Sens. Earth Space 2018, 18, 125–134. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mikhailenko, I.M. Estimation of Parameters of Biomass State of Sowing Spring Wheat. Remote Sens. 2022, 14, 1388. https://doi.org/10.3390/rs14061388
Mikhailenko IM. Estimation of Parameters of Biomass State of Sowing Spring Wheat. Remote Sensing. 2022; 14(6):1388. https://doi.org/10.3390/rs14061388
Chicago/Turabian StyleMikhailenko, Ilya Mikhayilovich. 2022. "Estimation of Parameters of Biomass State of Sowing Spring Wheat" Remote Sensing 14, no. 6: 1388. https://doi.org/10.3390/rs14061388
APA StyleMikhailenko, I. M. (2022). Estimation of Parameters of Biomass State of Sowing Spring Wheat. Remote Sensing, 14(6), 1388. https://doi.org/10.3390/rs14061388