
Evaluation of Satellite-Derived Estimates of Lake Ice Cover Timing on Linnévatnet, Kapp Linné, Svalbard Using In-Situ Data

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data
2.2.1. In-Situ Observations
2.2.2. Satellite Observations
2.3. Methods
2.3.1. Lake Ice Timing from In-Situ Observations
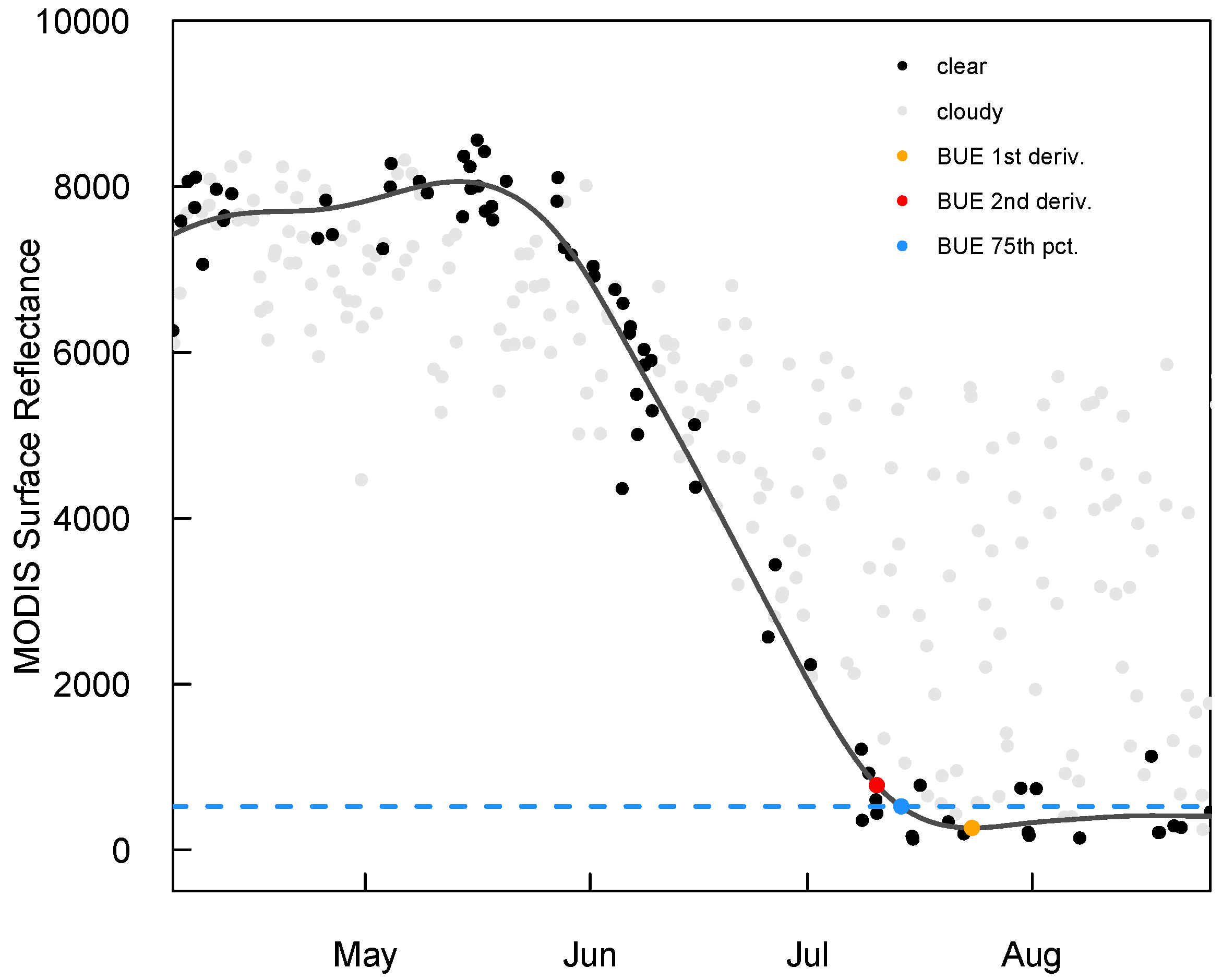
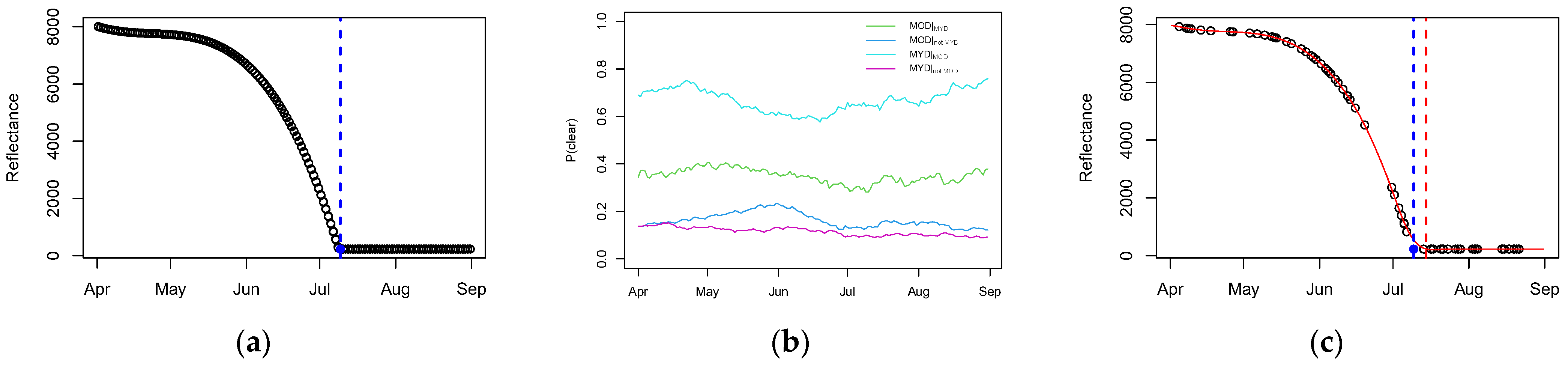
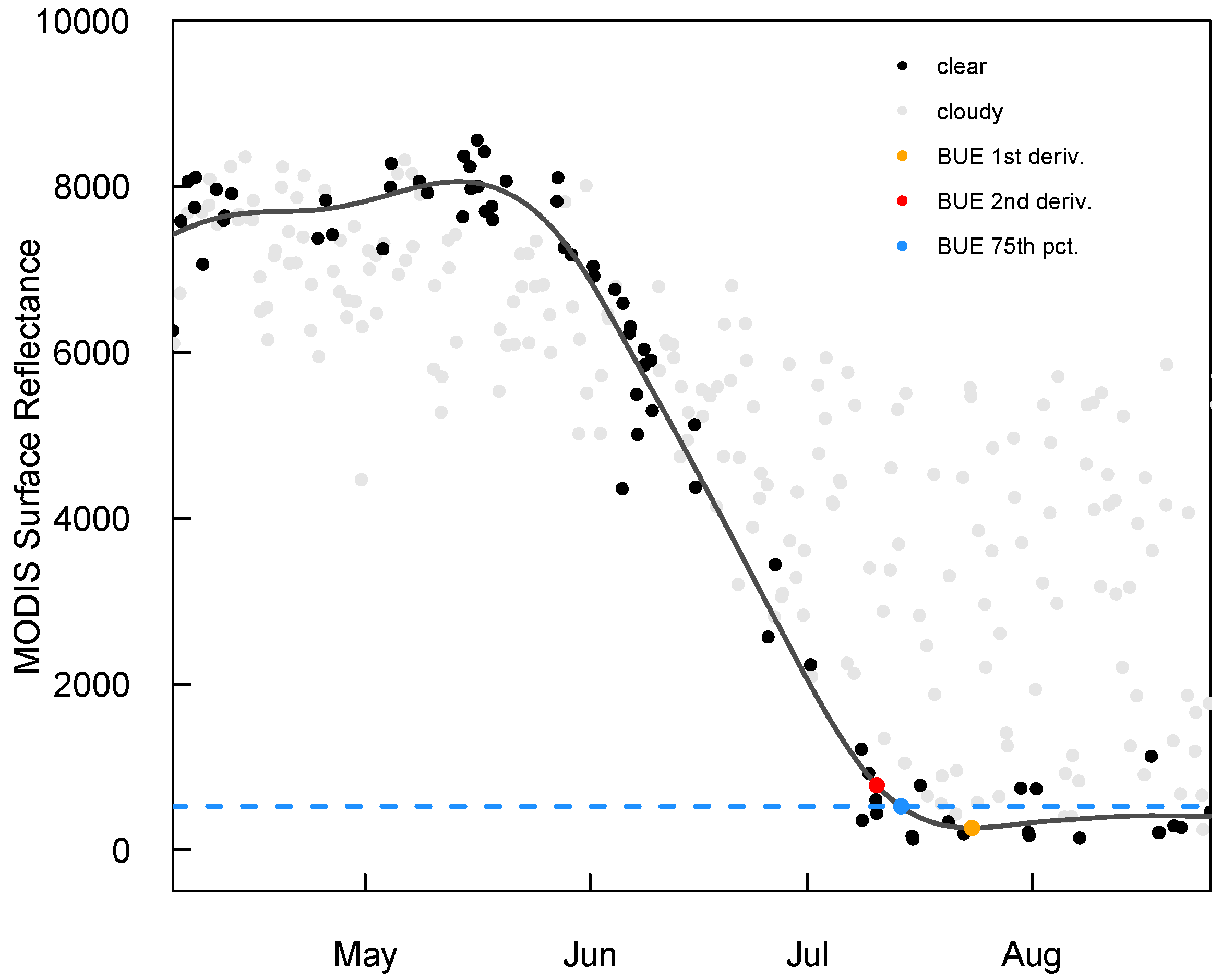
2.3.2. Lake Ice Phenology from MODIS
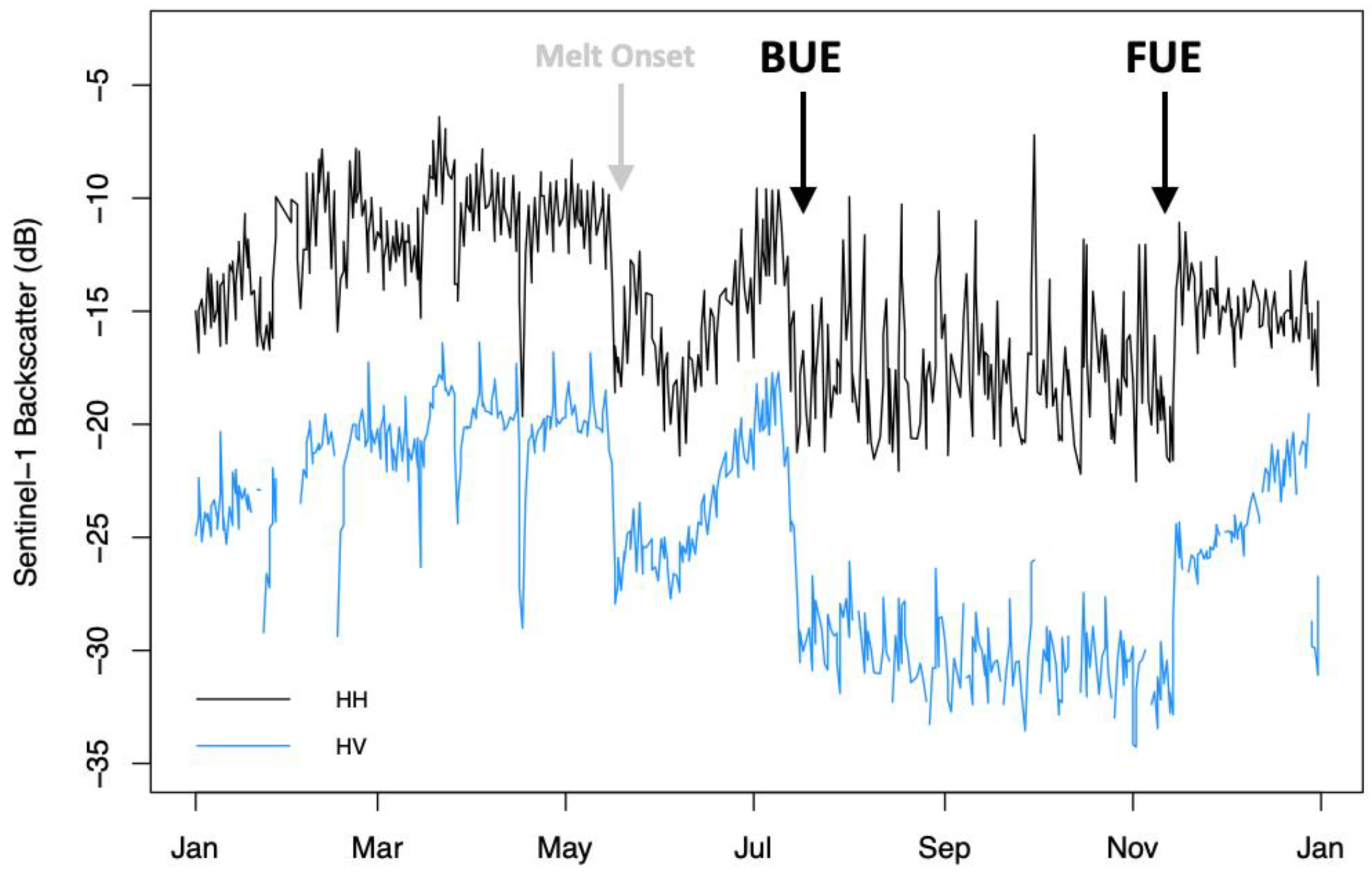
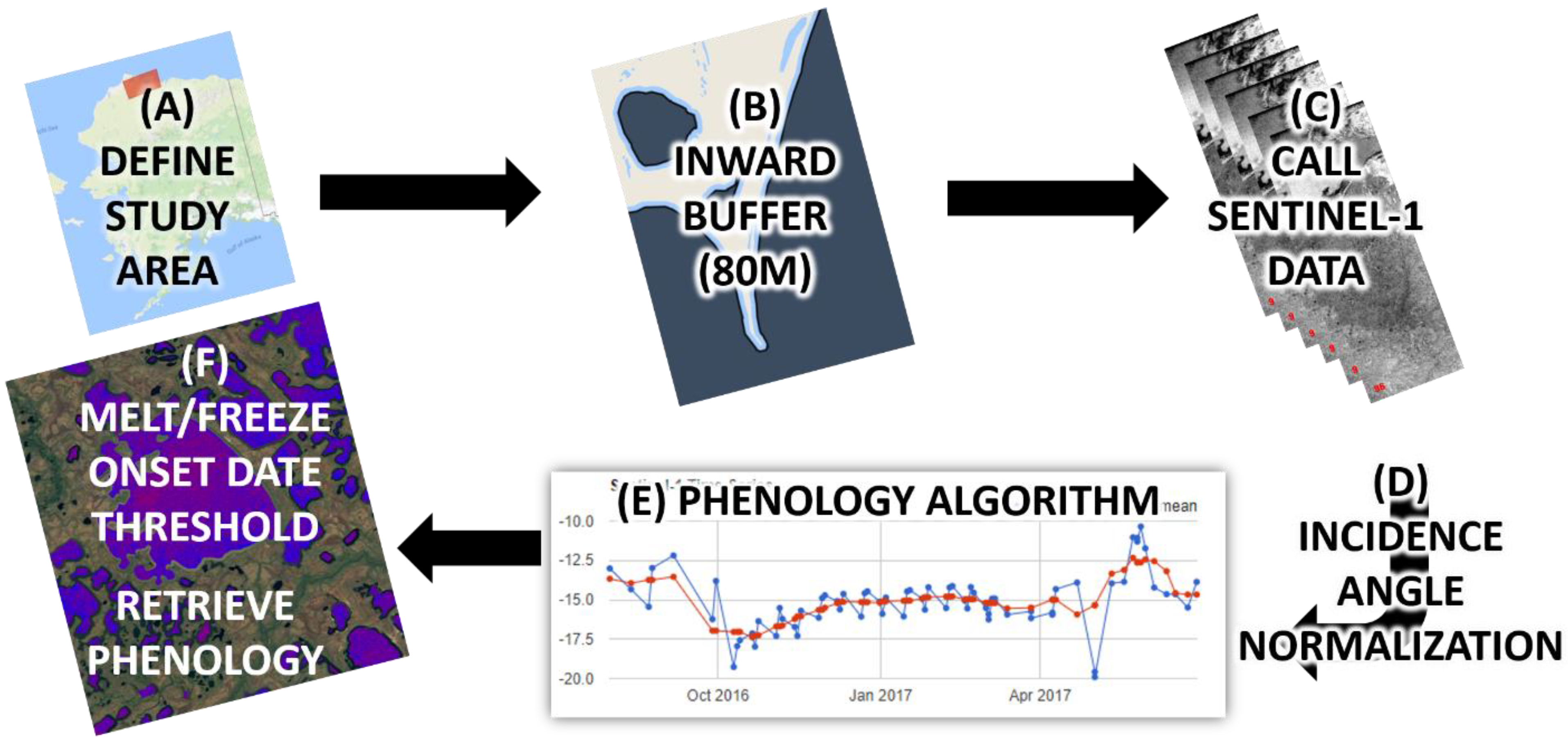
2.3.3. Lake Ice Phenology from Sentinel-1
2.3.4. Agreement between Lake Ice Phenology Estimates
3. Results
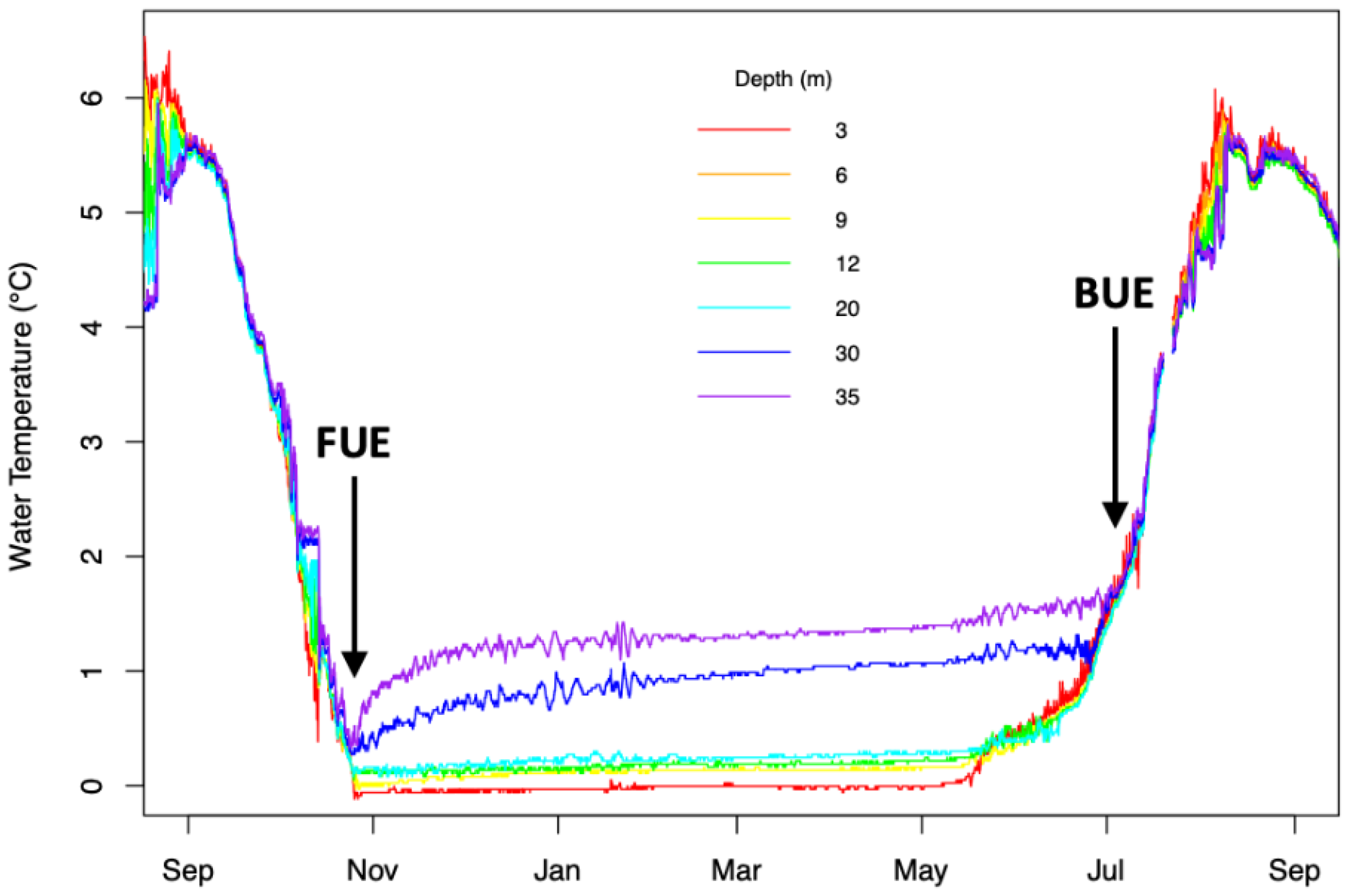
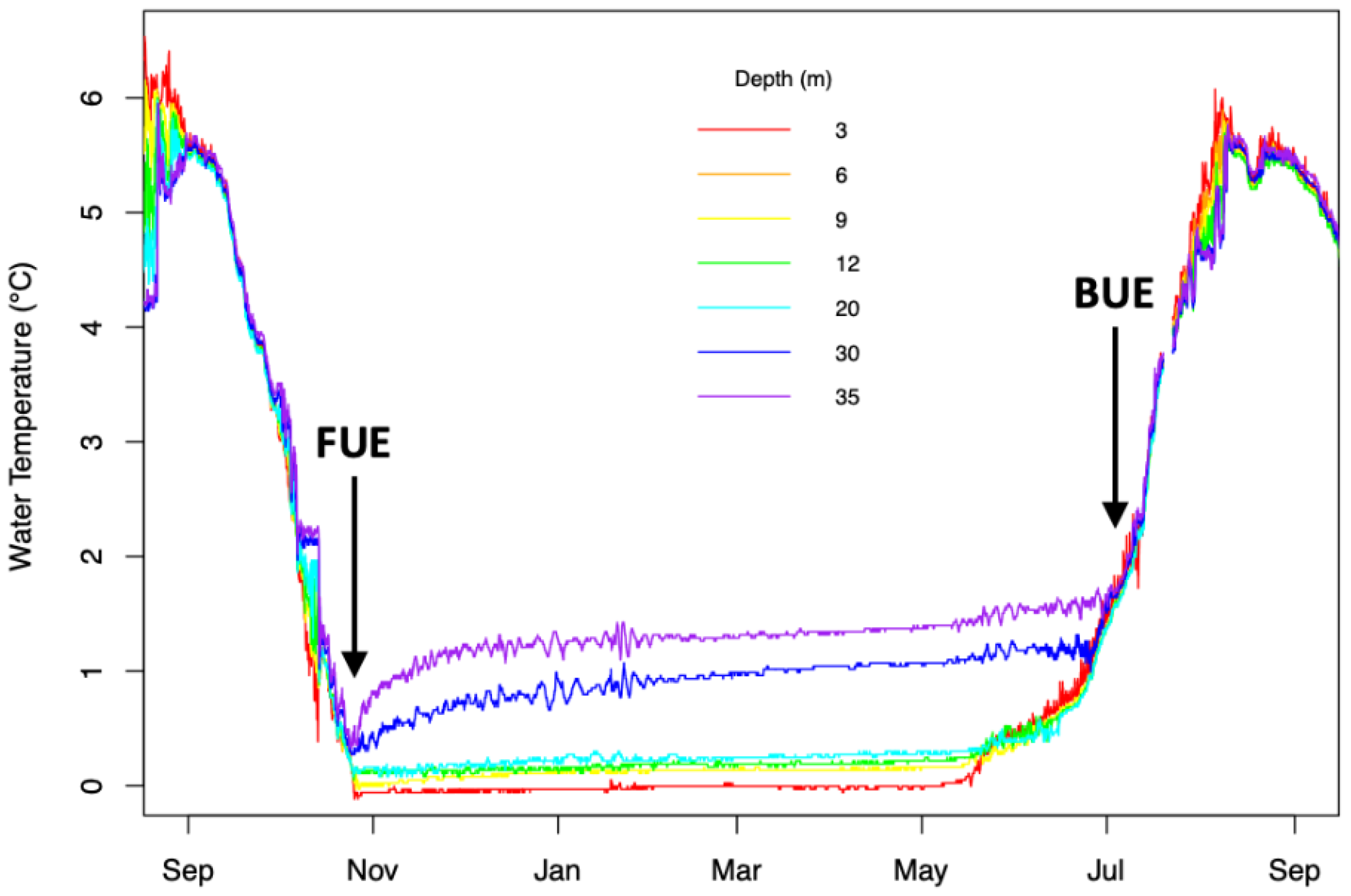
3.1. Lake Water Temperature Dynamics
3.2. In-Situ Observations of Lake Ice Timing
3.3. Satellite vs. In-Situ Lake Ice Phenology
4. Discussion
4.1. Considerations for Determining Lake Ice Timing
4.2. Effect of Clouds on MODIS BUE Dates
4.3. Lake Ice Phenology from MODIS vs. Sentinel-1
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Serreze, M.C.; Barry, R.G. Processes and impacts of Arctic amplification: A research synthesis. Global Planet. Change 2011, 77, 85–96. [Google Scholar] [CrossRef]
- Sharma, S.; Meyer, M.F.; Culpepper, J.; Yang, X.; Hampton, S.; Berger, S.A.; Brousil, M.R.; Fradkin, S.C.; Higgins, S.N.; Jankowski, K.J.; et al. Integrating perspectives to understand lake ice dynamics in a changing world. J. Geophys. Res.-Biogeo. 2020, 125, e2020JG005799. [Google Scholar] [CrossRef]
- Sharma, S.; Richardson, D.C.; Woolway, R.I.; Imrit, M.A.; Bouffard, D.; Blagrave, K.; Daly, J.; Filazzola, A.; Granin, N.; Korhonen, J.; et al. Loss of ice cover, shifting phenology, and more extreme events in Northern Hemisphere lakes. J. Geophys. Res.-Biogeo. 2021, 126, e2021JG006348. [Google Scholar] [CrossRef]
- Goosse, H.; Kay, J.E.; Armour, K.C.; Bodas-Salcedo, A.; Chepfer, H.; Docquier, D.; Jonko, A.; Kushner, P.J.; Lecomte, O.; Massonnet, F.; et al. Quantifying climate feedbacks in polar regions. Nat. Commun. 2018, 9, 1919. [Google Scholar] [CrossRef]
- Williamson, C.E.; Dodds, W.; Kratz, T.K.; Palmer, M.A. Lakes and streams as sentinels of environmental change in terrestrial and atmospheric processes. Front. Ecol. Environ. 2008, 6, 247–254. [Google Scholar] [CrossRef]
- Adrian, R.; O’Reilly, C.M.; Zagarese, H.; Baines, S.B.; Hessen, D.O.; Keller, W.; Livingstone, D.M.; Sommaruga, R.; Straile, D.; van Donk, E.; et al. Lakes as sentinels of climate change. Limnol. Oceanogr. 2009, 54, 2283–2297. [Google Scholar] [CrossRef] [PubMed]
- Weyhenmeyer, G.A.; Meili, M.; Livingstone, D.M. Nonlinear temperature response of lake ice breakup. Geophys. Res. Lett. 2004, 31, L07203. [Google Scholar] [CrossRef] [Green Version]
- Walsh, J.E.; Anisimov, O.; Hagen, J.O.; Jakobsson, T.; Oerlemans, J.; Prowse, T.D.; Romanovsky, V.; Savelieva, N.; Serreze, M.; Shiklomanov, A.; et al. Cryosphere and hydrology. In Arctic Climate Impact Assessment. Scientific Report; Arris, L., Ed.; Cambridge University Press: Cambridge, UK, 2005; pp. 183–242. [Google Scholar]
- Higgins, S.N.; Desjardins, C.M.; Drouin, H.; Hrenchuk, L.E.; Van der Sanden, J.J. The role of climate and lake size in regulating the ice phenology of boreal lakes. J. Geophys. Res.-Biogeo. 2021, 126, e2020JG005898. [Google Scholar] [CrossRef]
- Liston, G.E.; Hall, D.K. An energy-balance model of lake-ice evolution. J. Glaciol. 1995, 41, 373–382. [Google Scholar] [CrossRef] [Green Version]
- Brown, L.C.; Duguay, C.R. The response and role of ice cover in lake-climate interactions. Prog. Phys. Geog. 2010, 34, 671–704. [Google Scholar] [CrossRef]
- Arp, C.D.; Jones, B.M.; Grosse, G. Recent lake ice-out phenology within and among lake districts of Alaska, USA. Limnol. Oceanogr. 2013, 58, 2013–2028. [Google Scholar] [CrossRef]
- Prowse, T.; Alfredsen, K.; Beltaos, S.; Bonsal, B.R.; Bowden, W.B.; Duguay, C.R.; Korhola, A.; McNamara, J.; Vincent, W.F.; Vuglinsky, V.; et al. Effects of changes in arctic lake and river ice. Ambio 2011, 40, 63–74. [Google Scholar] [CrossRef] [Green Version]
- Dibike, Y.; Prowse, T.; Saloranta, T.; Ahmed, R. Response of Northern Hemisphere lake-ice cover and lake-water thermal structure patterns to a changing climate. Hydrol. Process. 2011, 25, 2942–2953. [Google Scholar] [CrossRef]
- Hampton, S.E.; Galloway, A.W.; Powers, S.M.; Ozersky, T.; Woo, K.H.; Batt, R.D.; Labou, S.G.; O’Reilly, C.M.; Sharma, S.; Lottig, N.R.; et al. Ecology under lake ice. Ecol. Lett. 2017, 20, 98–111. [Google Scholar] [CrossRef] [PubMed]
- Dugan, H.A. A Comparison of ecological memory of lake ice-off in eight north-temperate lakes. J. Geophys. Res.-Biogeo. 2021, 126, e2020JG006232. [Google Scholar] [CrossRef]
- Magnuson, J.J.; Robertson, D.M.; Benson, B.J.; Wynne, R.H.; Livingstone, D.M.; Arai, T.; Assel, R.A.; Barry, R.G.; Card, V.; Kuusisto, E.; et al. Historical trends in lake and river ice cover in the Northern Hemisphere. Science 2000, 289, 1743. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duguay, C.R.; Prowse, T.D.; Bonsal, B.R.; Brown, R.D.; Lacroix, M.P.; Ménard, P. Recent trends in Canadian lake ice cover. Hydrol. Process. 2006, 20, 781–801. [Google Scholar] [CrossRef]
- Latifovic, R.; Pouliot, D. Analysis of climate change impacts on lake ice phenology in Canada using the historical satellite data record. Remote Sens. Environ. 2007, 106, 492–507. [Google Scholar] [CrossRef]
- Prowse, T.; Alfredsen, K.; Beltaos, S.; Bonsal, B.; Duguay, C.; Korhola, A.; McNamara, J.; Pienitz, R.; Vincent, W.F.; Vuglinsky, V.; et al. Past and future changes in Arctic lake and river ice. Ambio 2011, 40, 53–62. [Google Scholar] [CrossRef] [Green Version]
- Benson, B.J.; Magnuson, J.J.; Jensen, O.P.; Card, V.M.; Hodgkins, G.; Korhonen, J. Extreme events, trends, and variability in Northern Hemisphere lake-ice phenology (1855–2005). Clim. Change 2012, 112, 299–323. [Google Scholar] [CrossRef]
- O’Reilly, C.M.; Sharma, S.; Gray, D.K.; Hampton, S.E.; Read, J.S.; Rowley, R.J.; Schneider, P.; Lenters, J.D.; McIntyre, P.B.; Kraemer, B.M.; et al. Rapid and highly variable warming of lake surface waters around the globe. Geophys. Res. Lett. 2015, 42, 10–773. [Google Scholar] [CrossRef] [Green Version]
- Šmejkalová, T.; Edwards, M.E.; Dash, J. Arctic lakes show strong decadal trend in earlier spring ice-out. Sci. Rep. 2016, 6, 38449. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, K.; Michelutti, N.; Sugar, M.; Douglas, M.S.; Smol, J.P. Ice-cover is the principal driver of ecological change in High Arctic lakes and ponds. PLoS ONE 2017, 12, e0172989. [Google Scholar] [CrossRef] [PubMed]
- Lehnherr, I.; Louis, V.L.S.; Sharp, M.; Gardner, A.S.; Smol, J.P.; Schiff, S.L.; Muir, D.C.G.; Mortimer, C.A.; Michelutti, N.; Tarnocai, C.; et al. The world’s largest High Arctic lake responds rapidly to climate warming. Nat. Comm. 2018, 9, 1290. [Google Scholar] [CrossRef] [PubMed]
- Newton, A.M.W.; Mullan, D.J. Climate change and Northern Hemisphere lake and river ice phenology from 1931–2005. Cryosphere 2021, 15, 2211–2234. [Google Scholar] [CrossRef]
- Post, E.; Alley, R.B.; Christensen, T.R.; Macias-Fauria, M.; Forbes, B.C.; Gooseff, M.N.; Iler, A.; Kerby, J.T.; Laidre, K.L.; Mann, M.E.; et al. The polar regions in a 2 C warmer world. Sci. Adv. 2019, 5, eaaw9883. [Google Scholar] [CrossRef] [Green Version]
- Brown, L.C.; Duguay, C.R. The fate of lake ice in the North American Arctic. Cryosphere 2011, 5, 869–892. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Blagrave, K.; Magnuson, J.J.; O’Reilly, C.M.; Oliver, S.; Batt, R.D.; Straile, D.; Weyhenmeyer, G.A.; Winslow, L.; Woolway, R.I. Widespread loss of lake ice around the Northern Hemisphere in a warming world. Nat. Clim. Change 2019, 9, 227–231. [Google Scholar] [CrossRef]
- Korhonen, J. Long-term changes in lake ice cover in Finland. Hydrol. Res. 2006, 37, 347–363. [Google Scholar] [CrossRef]
- Robertson, D.M.; Ragotzkie, R.A.; Magnuson, J.J. Lake ice records used to detect historical and future climatic changes. Clim. Change 1992, 21, 407–427. [Google Scholar] [CrossRef]
- Hodgkins, G.A.; James, I.C.; Huntington, T.G. Historical changes in lake ice-out dates as indicators of climate change in New England, 1850–2000. Int. J. Climatol. 2002, 22, 1819–1827. [Google Scholar] [CrossRef]
- Walsh, S.E.; Vavrus, S.J.; Foley, J.A.; Fisher, V.A.; Wynne, R.H.; Lenters, J.D. Global patterns of lake ice phenology and climate: Model simulations and observations. J. Geophys. Res.-Atmos. 1998, 103, 28825–28837. [Google Scholar] [CrossRef] [Green Version]
- Duguay, C.R.; Flato, G.M.; Jeffries, M.O.; Ménard, P.; Morris, K.; Rouse, W.R. Ice-cover variability on shallow lakes at high latitudes: Model simulations and observations. Hydrol. Process. 2003, 17, 3465–3483. [Google Scholar] [CrossRef]
- Duguay, C.R.; Pultz, T.J.; Lafleur, P.M.; Drai, D. RADARSAT backscatter characteristics of ice growing on shallow sub-arctic lakes, Churchill, Manitoba, Canada. Hydrol. Process. 2002, 16, 1631–1644. [Google Scholar] [CrossRef]
- Howell, S.E.; Brown, L.C.; Kang, K.K.; Duguay, C.R. Variability in ice phenology on Great Bear Lake and Great Slave Lake, Northwest Territories, Canada, from SeaWinds/QuikSCAT: 2000–2006. Remote Sens. Environ. 2009, 113, 816–834. [Google Scholar] [CrossRef]
- Cook, T.L.; Bradley, R.S. An analysis of past and future changes in the ice cover of two High-Arctic lakes based on synthetic aperture radar (SAR) and Landsat imagery. Arct. Antarct. Alp. Res. 2010, 42, 9–18. [Google Scholar] [CrossRef]
- Murfitt, J.; Brown, L.C. Lake ice and temperature trends for Ontario and Manitoba: 2001 to 2014. Hydrol. Process. 2017, 31, 3596–3609. [Google Scholar] [CrossRef]
- Zhang, S.; Pavelsky, T.M. Remote sensing of lake ice phenology across a range of lakes sizes, ME, USA. Remote Sens. 2019, 11, 1718. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Pavelsky, T.M.; Arp, C.D.; Yang, X. Remote sensing of lake ice phenology in Alaska. Environ. Res. Lett. 2021, 16, 064007. [Google Scholar] [CrossRef]
- Yang, X.; Pavelsky, T.M.; Bendezu, L.P.; Zhang, S. Simple Method to Extract Lake Ice Condition from Landsat Images. IEEE Trans. Geosci. Remote 2021, 60, 1–10. [Google Scholar] [CrossRef]
- Liu, C.; Huang, H.; Hui, F.; Zhang, Z.; Cheng, X. Fine-Resolution Mapping of Pan-Arctic Lake Ice-Off Phenology Based on Dense Sentinel-2 Time Series Data. Remote Sens. 2021, 13, 2742. [Google Scholar] [CrossRef]
- Hanssen-Bauer, I.; Førland, E.J.; Hisdal, H.; Mayer, S.; Sandø, A.B.; Sorteberg, A. Climate in Svalbard 2100. A Knowledge Base for Climate Adaptation; NCCS Report no 1/2019; Norwegian Centre of Climate Services (NCCS) for Norwegian Environment Agency: Trondhjem, Norway, 2019; 208p.
- Eckerstorfer, M.; Christiansen, H.H. The “High Arctic maritime snow climate” in central Svalbard. Arct. Antarct. Alp. Res. 2011, 43, 11–21. [Google Scholar] [CrossRef] [Green Version]
- Barton, B.I.; Lenn, Y.D.; Lique, C. Observed Atlantification of the Barents Sea causes the polar front to limit the expan-sion of winter sea ice. J. Phys. Oceanogr. 2018, 48, 1849–1866. [Google Scholar] [CrossRef]
- Nilsen, F.; Skogseth, R.; Vaardal-Lunde, J.; Inall, M. A simple shelf circulation model: Intrusion of Atlantic water on the West Spitsbergen shelf. J. Phys. Oceanogr. 2016, 46, 1209–1230. [Google Scholar] [CrossRef]
- Kohler, J.; James, T.D.; Murray, T.; Nuth, C.; Brandt, O.; Barrand, N.E.; Aas, H.F.; Luckman, A. Acceleration in thinning rate on western Svalbard glaciers. Geophys. Res. Lett. 2007, 34, L18502. [Google Scholar] [CrossRef] [Green Version]
- Schuler, T.V.; Kohler, J.; Elagina, N.; Hagen, J.O.; Hodson, A.; Jania, J.; Kääb, A.M.; Luks, B.; Małecki, J.; Moholdt, G.; et al. Reconciling Svalbard glacier mass balance. Front. Earth Sci. 2020, 8, 156. [Google Scholar] [CrossRef]
- Christiansen, H.H.; Gilbert, G.L.; Demidov, N.; Guglielmin, M.; Isaksen, K.; Osuch, M.; Boike, J. Permafrost thermal snapshot and active-layer thickness in Svalbard 2016–2017. First SIOS SESS Rep. 2019, 27–47. Available online: https://sios-svalbard.org/SESS_Issue1 (accessed on 31 December 2021).
- Nowak, A.; Hodson, A. Hydrological response of a High-Arctic catchment to changing climate over the past 35 years: A case study of Bayelva watershed, Svalbard. Polar Res. 2013, 32, 19691. [Google Scholar] [CrossRef] [Green Version]
- Førland, E.J.; Benestad, R.; Hanssen-Bauer, I.; Haugen, J.E.; Skaugen, T.E. Temperature and precipitation development at Svalbard 1900–2100. Adv. Meteorol. 2011, 2011, 893790. [Google Scholar] [CrossRef]
- Osuch, M.; Wawrzyniak, T. Inter-and intra-annual changes in air temperature and precipitation in western Spitsbergen. Int. J. Climatol. 2017, 37, 3082–3097. [Google Scholar] [CrossRef]
- Retelle, M.; Christiansen, H.; Hodson, A.; Nikulina, A.; Osuch, M.; Poleshuk, K.; Romashova, K.; Roof, S.; Rouyet, L.; Strand, S.M.; et al. Environmental Monitoring in the Kapp Linne-Gronfjorden Region (KLEO). The State of Environmental Science in Svalbard. 2019. Available online: https://par.nsf.gov/biblio/10140004-environmental-monitoring-kapp-linne-gronfjorden-region-kleo (accessed on 31 December 2021).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–127. [Google Scholar] [CrossRef]
- Vermote, E.; Wolfe, R. MOD09GA MODIS/Terra Surface Reflectance Daily L2G Global 1kmand 500m SIN Grid V006; NASA EOSDIS Land Processes DAAC: Sioux Falls, SD, USA, 2015. [CrossRef]
- Vermote, E.; Wolfe, R. MYD09GA MODIS/Aqua Surface Reflectance Daily L2G Global 1kmand 500m SIN Grid V006; NASA EOSDIS Land Processes DAAC: Sioux Falls, SD, USA, 2015. [CrossRef]
- Copernicus Sentinel Data. Sentinel-1A/B Synthetic Aperture Radar (SAR) Ground Range Detected (GRD). Available online: https://developers.google.com/earth-engine/datasets/catalog/COPERNICUS_S1_GRD (accessed on 31 December 2021).
- Gunn, G.E.; Duguay, C.R.; Atwood, D.K.; King, J.; Toose, P. Observing scattering mechanisms of bubbled freshwater lake ice using polarimetric RADARSAT-2 (C-Band) and UW-Scat (X-and Ku-Bands). IEEE Trans. Geosci. Remote 2018, 56, 2887–2903. [Google Scholar] [CrossRef]
- Howell, S.E.; Yackel, J.J.; De Abreu, R.; Geldsetzer, T.; Breneman, C. On the utility of SeaWinds/QuikSCAT data for the estimation of the thermodynamic state of first-year sea ice. IEEE Trans. Geosci. Remote 2005, 43, 1338–1350. [Google Scholar] [CrossRef]
- Atwood, D.K.; Gunn, G.E.; Roussi, C.; Wu, J.; Duguay, C.; Sarabandi, K. Microwave backscatter from Arctic lake ice and polarimetric implications. IEEE Trans. Geosci. Remote 2015, 53, 5972–5982. [Google Scholar] [CrossRef]
- Mladenova, I.E.; Jackson, T.J.; Bindlish, R.; Hensley, S. Incidence angle normalization of radar backscatter data. IEEE Trans. Geosci. Remote 2015, 51, 1791–1804. [Google Scholar] [CrossRef]
- Nordli, Ø.; Wyszyński, P.; Gjelten, H.; Isaksen, K.; Łupikasza, E.; Niedźwiedź, T.; Przybylak, R. Revisiting the extended Svalbard Airport monthly temperature series, and the compiled corresponding daily series 1898–2018. Polar Res. 2020, 39, 3614. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Method 1 | North Camera (n = 6) | Plume Camera (n = 8) | ||||
|---|---|---|---|---|---|---|---|
| Bias (Days) | MAE (Days) | RMSE (Days) | Bias (Days) | MAE (Days) | RMSE (Days) | ||
| In-situ water temp. | Manual | −0.5 | 2.64 | 3.0 | −0.9 | 3.3 | 3.5 |
| MODIS | dSR | 4.5 | 5.3 | 6.7 | 2.9 | 4.5 | 5.6 |
| d2SR | −3.9 | 4.6 | 4.9 | −5.7 | 6.3 | 6.9 | |
| Summer Q3 | −1.3 | 2.4 | 2.5 | −2.3 | 3.2 | 3.5 | |
| Sentinel-1 2 | HH Manual | 1.4 | 2.0 | 2.2 | 1.0 | 2.0 | 2.2 |
| HV Manual | 1.4 | 1.4 | 1.8 | 1.5 | 1.5 | 2.1 | |
| Data | Method 1 | North Camera (n = 8) | Plume Camera (n = 12) | ||||
|---|---|---|---|---|---|---|---|
| Bias (Days) | MAE (Days) | RMSE (Days) | Bias (Days) | MAE (Days) | RMSE (Days) | ||
| In-situ water temp. | Manual | −2.0 | 2.5 | 3.3 | 2.1 | 3.1 | 5.3 |
| AnnMin | −1.3 | 1.5 | 2.3 | 3.3 | 3.5 | 6.2 | |
| Sentinel-1 2 | HV Manual | −1.6 | 4.7 | 5.2 | 8.8 | 10.6 | 12.9 |
| Auto Median | 0.4 | 5.7 | 6.7 | 13.5 | 13.5 | 15.2 | |
| Data | Method 1 | Bias (Days) | MAE (Days) | RMSE (Days) |
|---|---|---|---|---|
| MODIS | dSR 2 | 8.4 | 8.7 | 11.4 |
| d2SR 3 | −4.0 | 4.7 | 5.5 | |
| Summer Q3 | 2.0 | 4.0 | 5.5 | |
| Sentinel-1 4 | HH Manual | 2.6 | 3.1 | 3.4 |
| HV Manual | 2.4 | 2.9 | 3.2 |
| Data | Method 1 | Bias (Days) | MAE (Days) | RMSE (Days) |
|---|---|---|---|---|
| In-situ water temp. | AnnMin | 0.9 | 1.6 | 2.0 |
| Sentinel-1 2 | HV Manual | 3.4 | 3.8 | 5.2 |
| Auto Median | 14.0 | 16.4 | 23.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tuttle, S.E.; Roof, S.R.; Retelle, M.J.; Werner, A.; Gunn, G.E.; Bunting, E.L. Evaluation of Satellite-Derived Estimates of Lake Ice Cover Timing on Linnévatnet, Kapp Linné, Svalbard Using In-Situ Data. Remote Sens. 2022, 14, 1311. https://doi.org/10.3390/rs14061311
Tuttle SE, Roof SR, Retelle MJ, Werner A, Gunn GE, Bunting EL. Evaluation of Satellite-Derived Estimates of Lake Ice Cover Timing on Linnévatnet, Kapp Linné, Svalbard Using In-Situ Data. Remote Sensing. 2022; 14(6):1311. https://doi.org/10.3390/rs14061311
Chicago/Turabian StyleTuttle, Samuel E., Steven R. Roof, Michael J. Retelle, Alan Werner, Grant E. Gunn, and Erin L. Bunting. 2022. "Evaluation of Satellite-Derived Estimates of Lake Ice Cover Timing on Linnévatnet, Kapp Linné, Svalbard Using In-Situ Data" Remote Sensing 14, no. 6: 1311. https://doi.org/10.3390/rs14061311
APA StyleTuttle, S. E., Roof, S. R., Retelle, M. J., Werner, A., Gunn, G. E., & Bunting, E. L. (2022). Evaluation of Satellite-Derived Estimates of Lake Ice Cover Timing on Linnévatnet, Kapp Linné, Svalbard Using In-Situ Data. Remote Sensing, 14(6), 1311. https://doi.org/10.3390/rs14061311