
Generating Terrain Data for Geomorphological Analysis by Integrating Topographical Features and Conditional Generative Adversarial Networks



Abstract
:1. Introduction
2. Materials and Methods
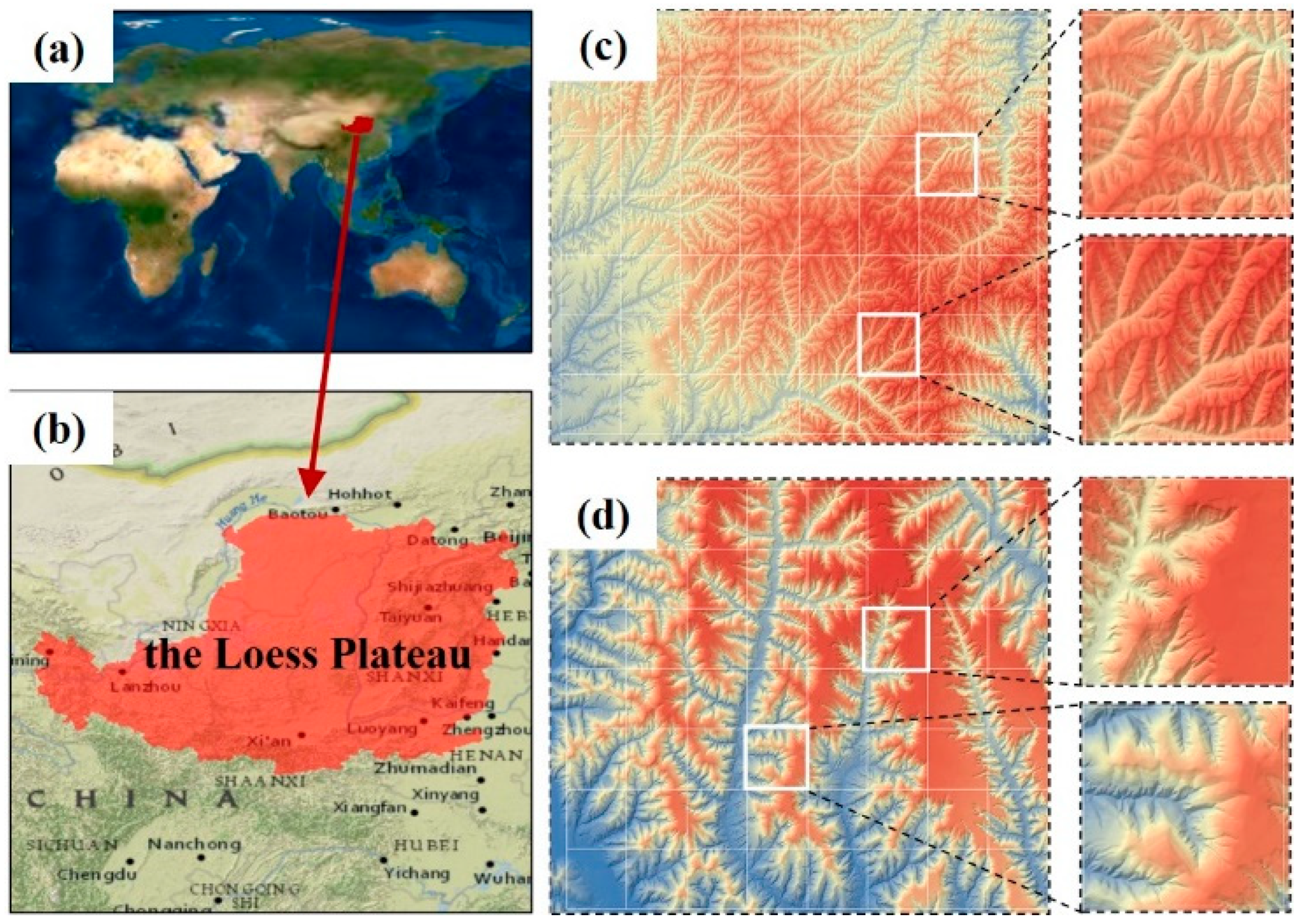
2.1. Study Object and Areas
2.2. Data Preparation
2.2.1. DEM Data
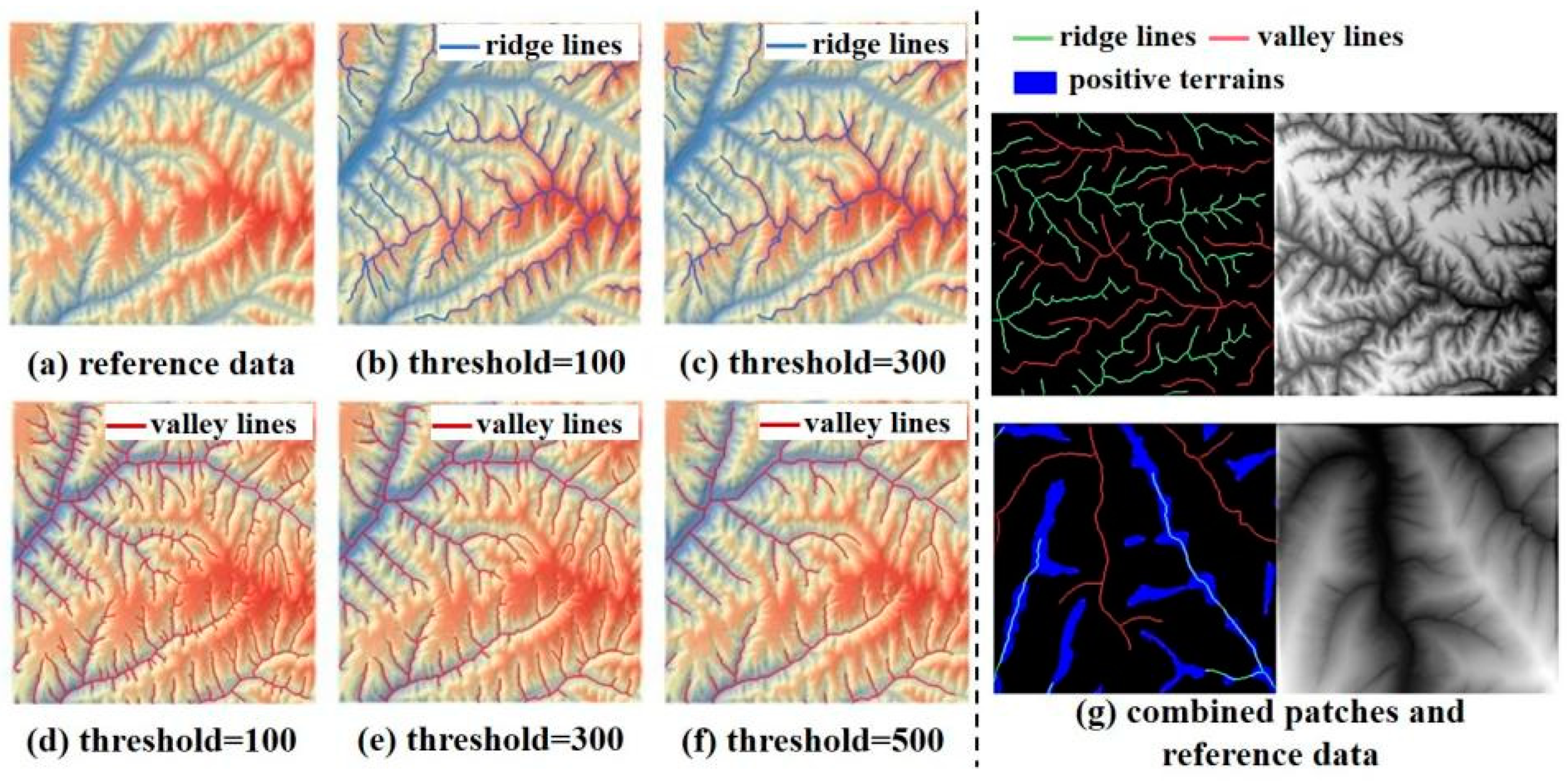
2.2.2. Input Terrain Features
2.3. DL-Based Algorithm for Terrain Generation
2.3.1. Basic Principle of CGAN
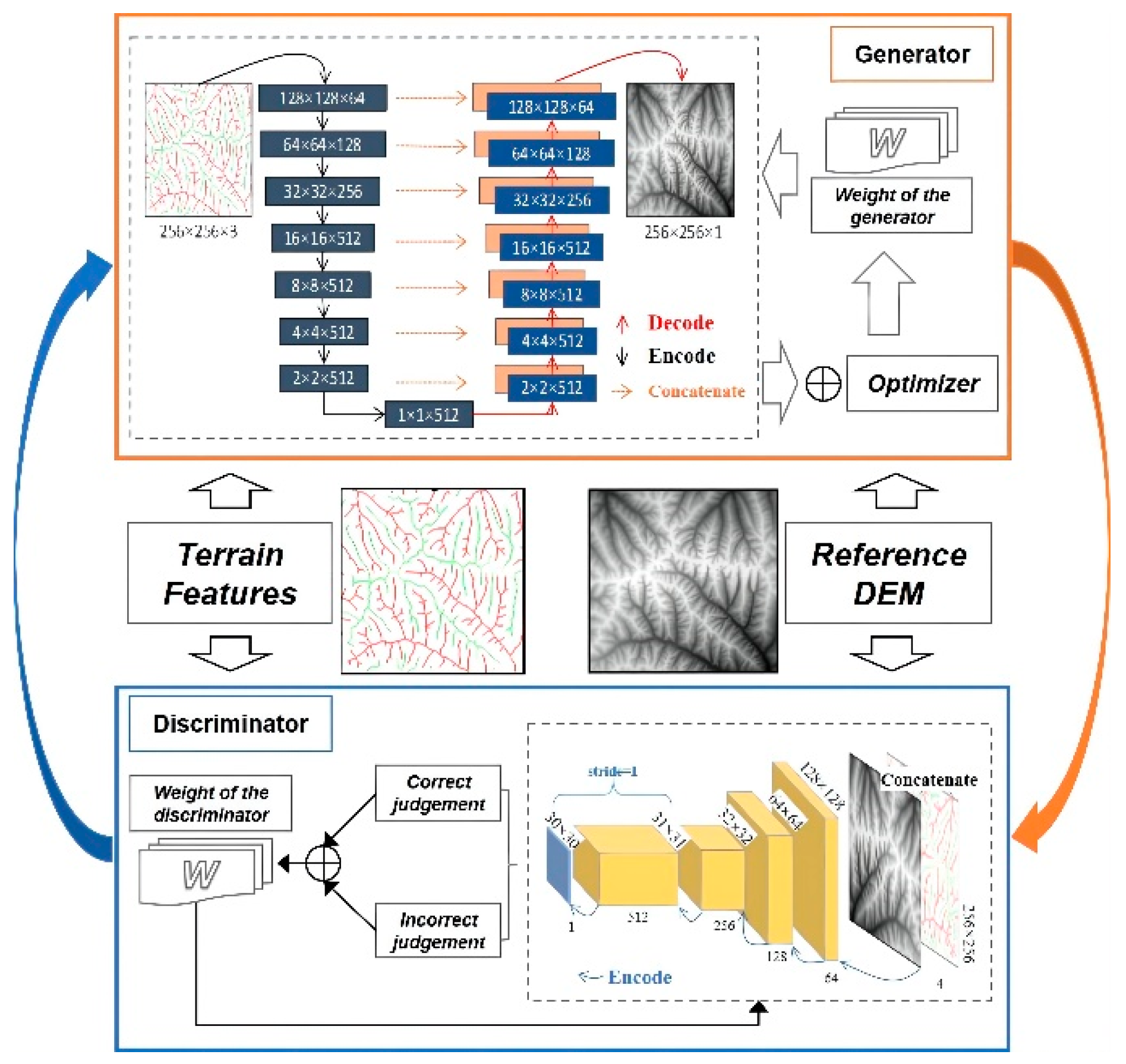
2.3.2. Terrain-CGAN
2.4. Experiments
2.5. Performance Evaluation
3. Results
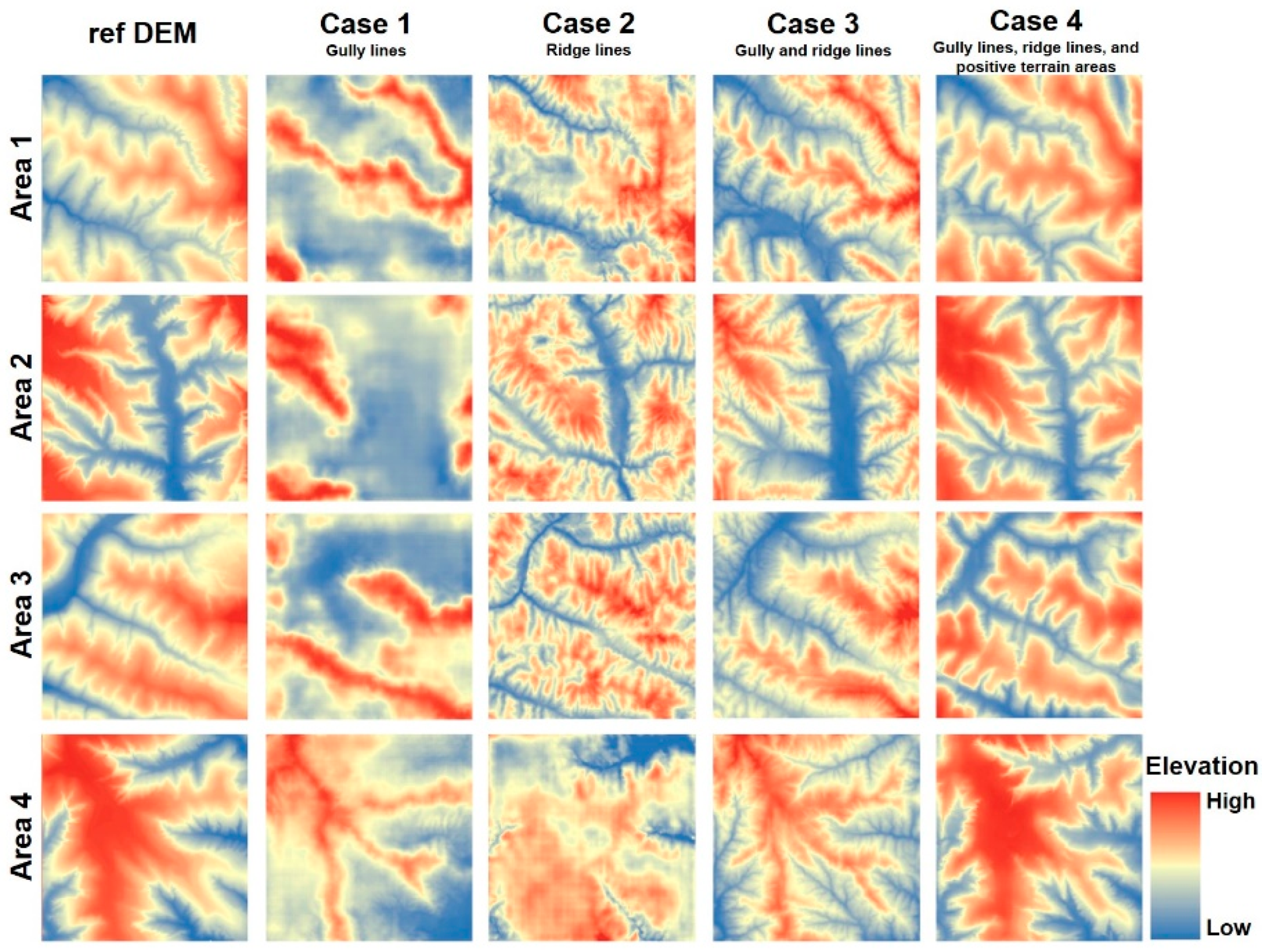
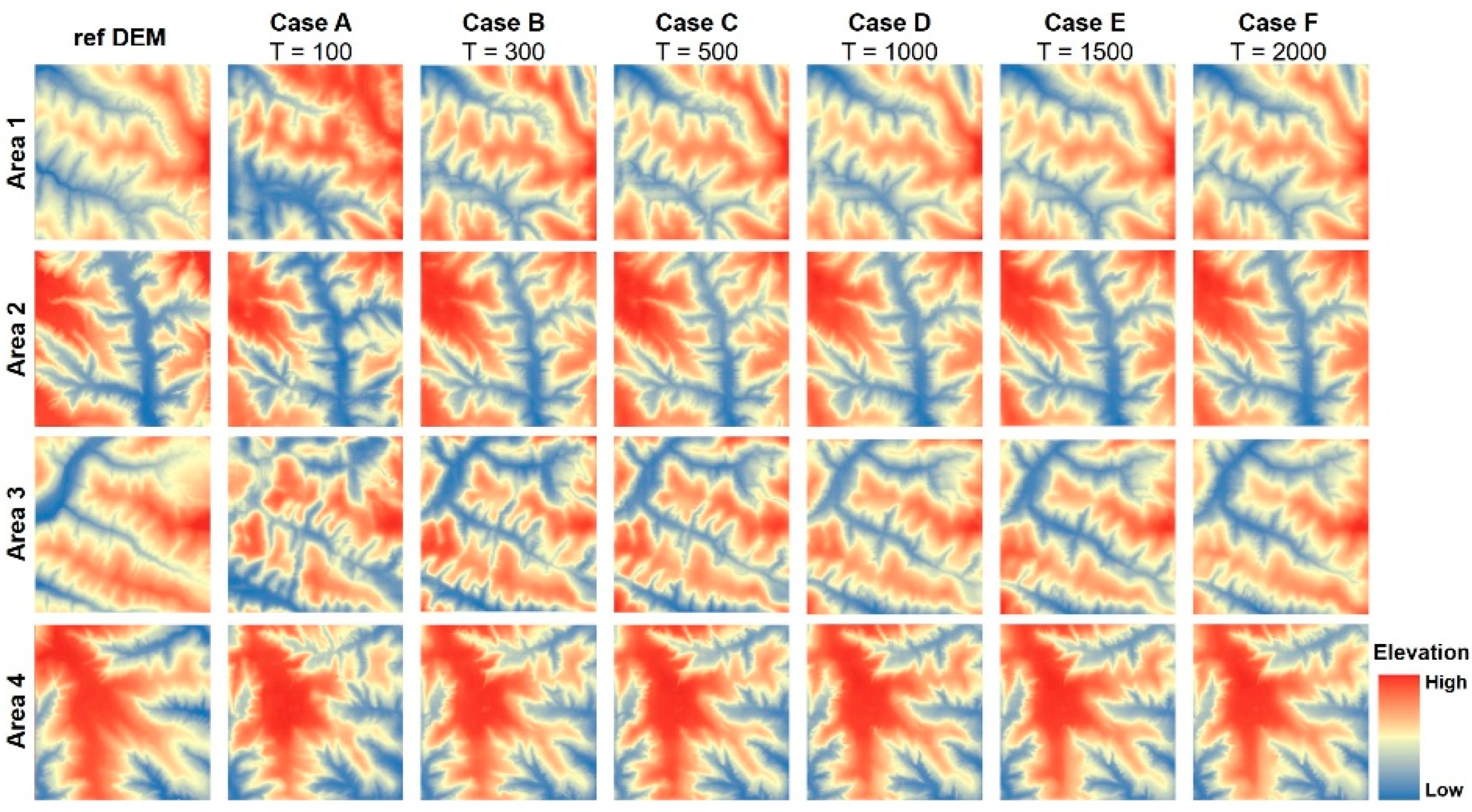
3.1. Results Based on Different Topographic Features
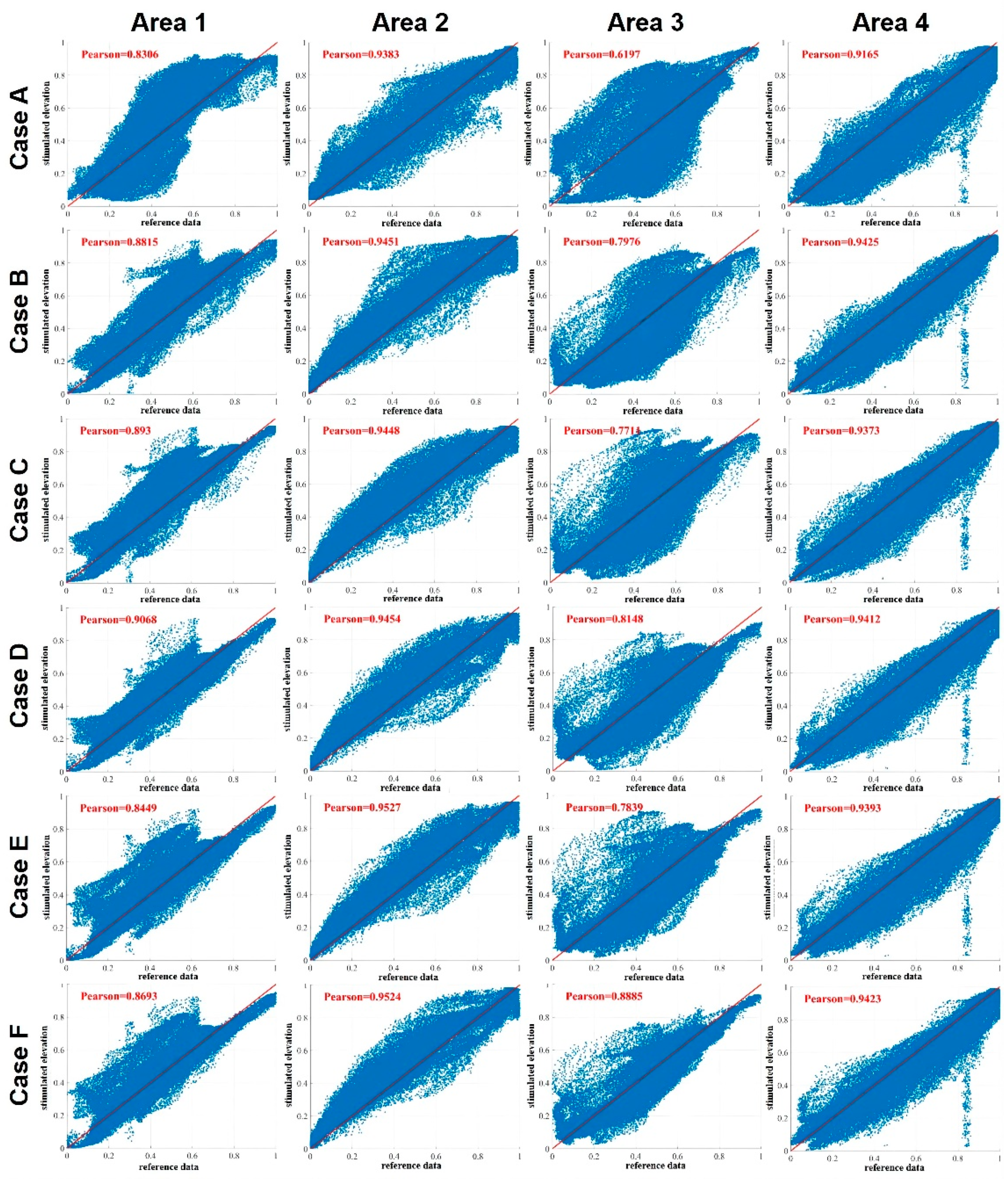
3.2. Elevation Analysis
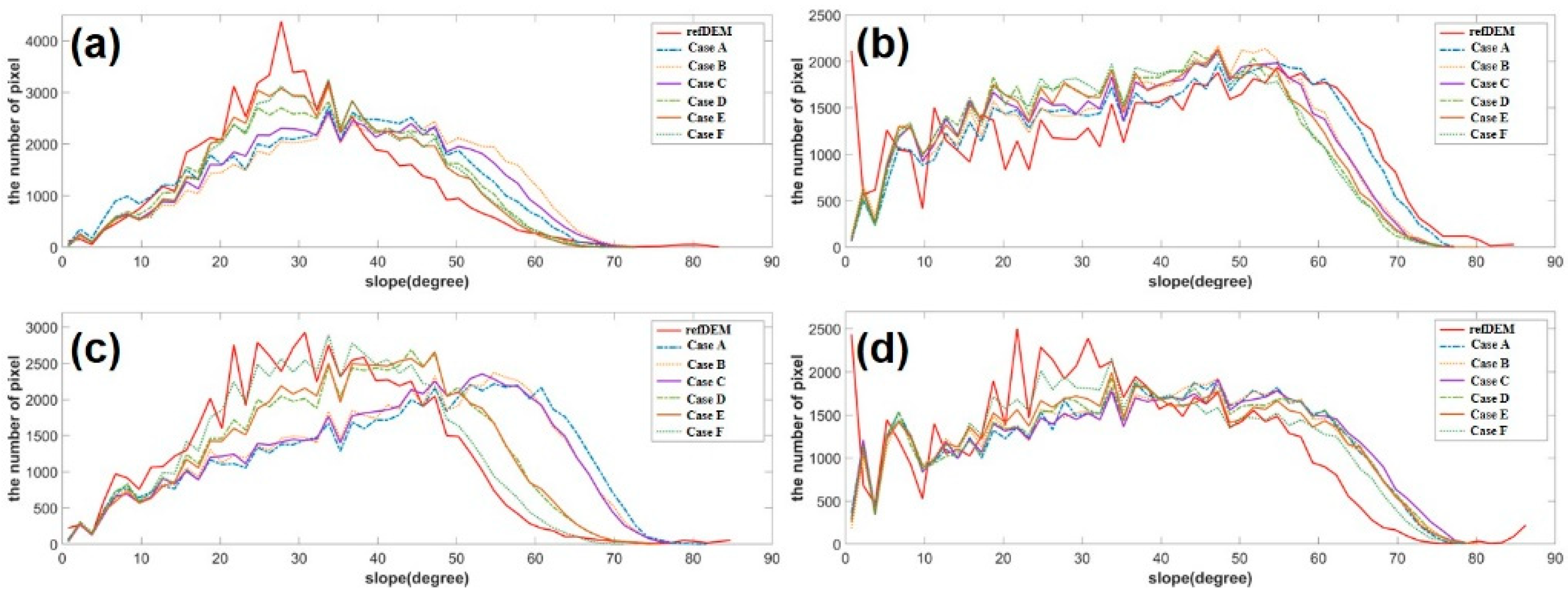
3.3. Slope Analysis
4. Discussion
4.1. Influence of Different Terrain Cues and Feature Combinations
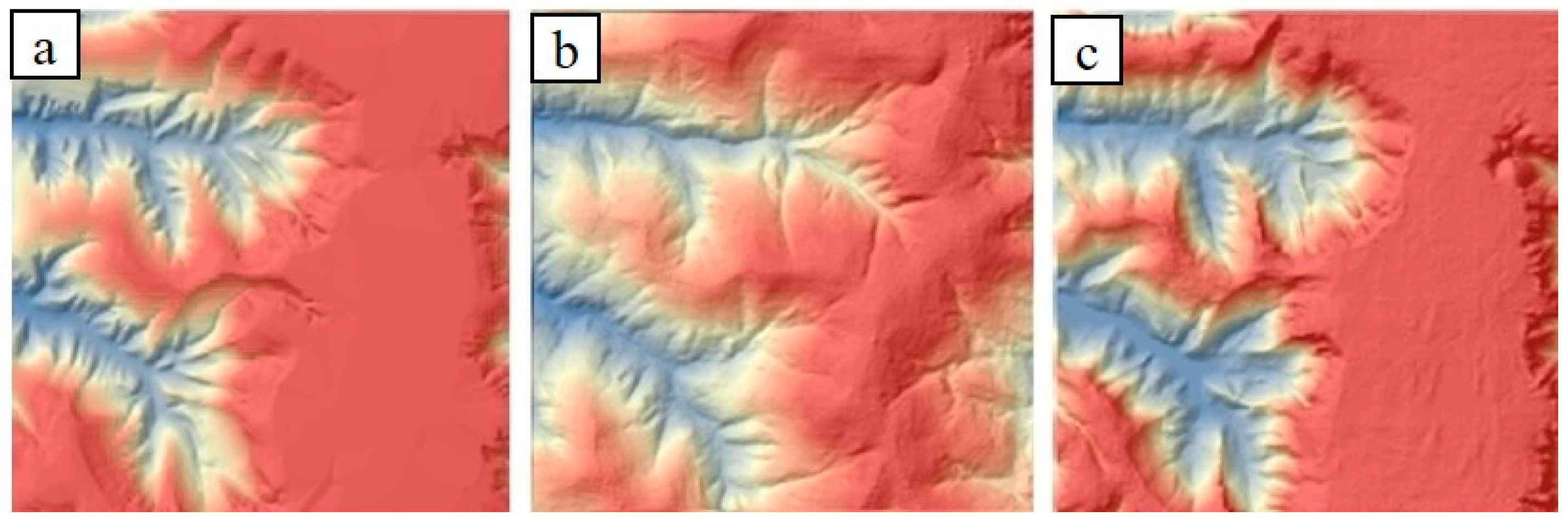
4.2. Applications of Terrain-CGAN
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Drăguţ, L.; Dornik, A. Land-surface segmentation as a method to create strata for spatial sampling and its potential for digital soil mapping. Int. J. Geogr. Inf. Sci. 2016, 30, 1359–1376. [Google Scholar] [CrossRef] [Green Version]
- Evans, I.S. Geomorphometry and landform mapping: What is a landform? Geomorphology 2012, 137, 94–106. [Google Scholar] [CrossRef]
- Li, S.; Xiong, L.; Tang, G.; Strobl, J. Deep learning-based approach for landform classification from integrated data sources of digital elevation model and imagery. Geomorphology 2020, 354, 107045. [Google Scholar] [CrossRef]
- Liu, K.; Song, C.; Ke, L.; Jiang, L.; Ma, R. Automatic watershed delineation in the Tibetan endorheic basin: A lake-oriented approach based on digital elevation models. Geomorphology 2020, 358, 107127. [Google Scholar] [CrossRef]
- Sesnie, S.E.; Gessler, P.E.; Finegan, B.; Thessler, S. Integrating Landsat TM and SRTM-DEM derived variables with decision trees for habitat classification and change detection in complex neotropical environments. Remote Sens. Environ. 2008, 112, 2145–2159. [Google Scholar] [CrossRef]
- Hu, G.; Wang, C.; Li, S.; Dai, W.; Xiong, L.; Tang, G.; Strobl, J. Using vertices of a triangular irregular network to calculate slope and aspect. Int. J. Geogr. Inf. Sci. 2021, 226, 103944. [Google Scholar] [CrossRef]
- Drăguţ, L.; Blaschke, T. Automated classification of landform elements using object-based image analysis. Geomorphology 2006, 81, 330–344. [Google Scholar] [CrossRef]
- Hu, G.; Dai, W.; Li, S.; Xiong, L.; Tang, G.; Strobl, J. Quantification of terrain plan concavity and convexity using aspect vectors from digital elevation models. Geomorphology 2021, 375, 107553. [Google Scholar] [CrossRef]
- Székely, B.; Karátson, D. DEM-based morphometry as a tool for reconstructing primary volcanic landforms: Examples from the Börzsöny Mountains, Hungary. Geomorphology 2004, 63, 25–37. [Google Scholar] [CrossRef]
- Székely, B.; Zámolyi, A.; Draganits, E.; Briese, C. Geomorphic expression of neotectonic activity in a low relief area in an Airborne Laser Scanning DTM: A case study of the Little Hungarian Plain (Pannonian Basin). Tectonophysics 2009, 474, 353–366. [Google Scholar] [CrossRef]
- Xiong, L.; Tang, G.; Yang, X.; Li, F. Geomorphology-oriented digital terrain analysis: Progress and perspectives. J. Geogr. Sci. 2021, 31, 456–476. [Google Scholar] [CrossRef]
- Yang, X.; Na, J.; Tang, G.; Wang, T.; Zhu, A. Bank gully extraction from DEMs utilizing the geomorphologic features of a loess hilly area in China. Front. Earth Sci. 2019, 13, 151–168. [Google Scholar] [CrossRef]
- Zhao, W.; Duan, S.-B.; Li, A.; Yin, G. A practical method for reducing terrain effect on land surface temperature using random forest regression. Remote Sens. Environ. 2019, 221, 635–649. [Google Scholar] [CrossRef]
- Lv, G.; Xiong, L.; Chen, M.; Tang, G.; Sheng, Y.; Liu, X.; Song, Z.; Lu, Y.; Yu, Z.; Zhang, K. Chinese progress in geomorphometry. J. Geogr. Sci. 2017, 27, 1389–1412. [Google Scholar] [CrossRef]
- Li, W.; Hsu, C.-Y. Automated terrain feature identification from remote sensing imagery: A deep learning approach. Int. J. Geogr. Inf. Sci. 2020, 34, 637–660. [Google Scholar] [CrossRef]
- Hsu, C.-Y.; Li, W.; Wang, S. Knowledge-Driven GeoAI: Integrating Spatial Knowledge into Multi-Scale Deep Learning for Mars Crater Detection. Remote Sens. 2021, 13, 2116. [Google Scholar] [CrossRef]
- Janowicz, K.; Gao, S.; McKenzie, G.; Hu, Y.; Bhaduri, B. GeoAI: Spatially explicit artificial intelligence techniques for geographic knowledge discovery and beyond. Int. J. Geogr. Inf. Sci. 2020, 34, 625–636. [Google Scholar] [CrossRef]
- Li, S.; Hu, G.; Cheng, X.; Xiong, L.; Tang, G.; Strobl, J. Integrating topographic knowledge into deep learning for the void-filling of digital elevation models. Remote Sens. Environ. 2022, 269, 112818. [Google Scholar] [CrossRef]
- Wilson, J.P. Digital terrain modeling. Geomorphology 2012, 137, 107–121. [Google Scholar] [CrossRef]
- Galin, E.; Guérin, E.; Peytavie, A.; Cordonnier, G.; Cani, M.P.; Benes, B.; Gain, J. A review of digital terrain modeling. Comput. Graph. Forum 2019, 38, 553–577. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhu, A.X. The recent advancement in digital terrain analysis and modeling. Int. J. Geogr. Inf. Sci. 2013, 27, 1269–1271. [Google Scholar] [CrossRef]
- Génevaux, J.-D.; Galin, É.; Guérin, E.; Peytavie, A.; Benes, B. Terrain generation using procedural models based on hydrology. ACM Trans. Graph. (TOG) 2013, 32, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Raffe, W.L.; Zambetta, F.; Li, X. A survey of procedural terrain generation techniques using evolutionary algorithms. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Rose, T.J.; Bakaoukas, A.G. Algorithms and approaches for procedural terrain generation-a brief review of current techniques. In Proceedings of the 2016 8th International Conference on Games and Virtual Worlds for Serious Applications (VS-GAMES), Barcelona, Spain, 7–9 September 2016; pp. 1–2. [Google Scholar]
- Smelik, R.M.; De Kraker, K.J.; Tutenel, T.; Bidarra, R.; Groenewegen, S.A. A survey of procedural methods for terrain modelling. In Proceedings of the CASA Workshop on 3D Advanced Media In Gaming And Simulation (3AMIGAS), Amsterdam, The Netherlands, 16 June 2009; pp. 25–34. [Google Scholar]
- Cordonnier, G.; Galin, E.; Gain, J.; Benes, B.; Guérin, E.; Peytavie, A.; Cani, M.-P. Authoring landscapes by combining ecosystem and terrain erosion simulation. ACM Trans. Graph. (TOG) 2017, 36, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Guérin, É.; Digne, J.; Galin, E.; Peytavie, A.; Wolf, C.; Benes, B.; Martinez, B. Interactive example-based terrain authoring with conditional generative adversarial networks. Acm Trans. Graph. (TOG) 2017, 36, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Cheng, X.; Zhang, F.; Yao, X.; Gao, Y.; Liu, Y. Spatial interpolation using conditional generative adversarial neural networks. Int. J. Geogr. Inf. Sci. 2020, 34, 735–758. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: New York, NY, USA, 2012; pp. 1097–1105. [Google Scholar]
- Zhong, Y.; Zhu, Q.; Zhang, L. Scene classification based on the multifeature fusion probabilistic topic model for high spatial resolution remote sensing imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6207–6222. [Google Scholar] [CrossRef]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar] [CrossRef]
- Gregor, K.; Danihelka, I.; Graves, A.; Rezende, D.J.; Wierstra, D. DRAW: A recurrent neural network for image generation. Comput. Sci. 2015, 37, 1462–1471. [Google Scholar]
- Gatys, L.A.; Ecker, A.S.; Bethge, M. Texture Synthesis Using Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2015, 70, 262–270. [Google Scholar]
- Gatys, L.A.; Ecker, A.S.; Bethge, M. Image style transfer using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2414–2423. [Google Scholar]
- Isola, P.; Zhu, J.-Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Dachsbacher, C.; Meyer, M.; Stamminger, M. Height-Field Synthesis by Non-Parametric Sampling. In Vision, Modeling and Visualization 2005; University of Erlangen-Nuremberg: Erlangen, Germany, 2005; pp. 297–302. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J. Deep learning in environmental remote sensing: Achievements and challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]
- Li, T.; Shen, H.; Yuan, Q.; Zhang, L. Geographically and temporally weighted neural networks for satellite-based mapping of ground-level PM2.5. ISPRS J. Photogramm. Remote Sens. 2020, 167, 178–188. [Google Scholar] [CrossRef]
- Fu, B. Soil erosion and its control in the Loess Plateau of China. Soil Use Manag. 1989, 5, 76–82. [Google Scholar] [CrossRef]
- Li, S.; Xiong, L.; Hu, G.; Dang, W.; Tang, G.; Strobl, J. Extracting check dam areas from high-resolution imagery based on the integration of object-based image analysis and deep learning. Land Degrad. Dev. 2021, 32, 2303–2317. [Google Scholar] [CrossRef]
- Xiong, L.-Y.; Tang, G.-A.; Li, F.-Y.; Yuan, B.-Y.; Lu, Z.-C. Modeling the evolution of loess-covered landforms in the Loess Plateau of China using a DEM of underground bedrock surface. Geomorphology 2014, 209, 18–26. [Google Scholar] [CrossRef]
- Xiong, L.; Tang, G.; Yuan, B.; Lu, Z.; Li, F.; Zhang, l. Geomorphological inheritance for loess landform evolution in a severe soil erosion region of Loess Plateau of China based on digital elevation models. Sci. China Earth Sci. 2014, 57, 1944–1952. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information system analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Zhou, Y.; Yang, X.; Xiao, C.; Zhang, Y.; Luo, M. Positive and negative terrains on northern Shaanxi Loess Plateau. J. Geogr. Sci. 2010, 20, 64–76. [Google Scholar] [CrossRef]
- Xiong, L.; Tang, G.; Yan, S.; Zhu, S.; Sun, Y. Landform-oriented flow-routing algorithm for the dual-structure loess terrain based on digital elevation models. Hydrol. Process. 2014, 28, 1756–1766. [Google Scholar] [CrossRef]
- Li, W.; Zhou, B.; Hsu, C.-Y.; Li, Y.; Ren, F. Recognizing terrain features on terrestrial surface using a deep learning model: An example with crater detection. In Proceedings of the 1st Workshop on Artificial Intelligence and Deep Learning for Geographic Knowledge Discovery, Los Angeles, CA, USA, 7–10 November 2017; pp. 33–36. [Google Scholar]
- Zhang, W.; Witharana, C.; Liljedahl, A.K.; Kanevskiy, M. Deep convolutional neural networks for automated characterization of arctic ice-wedge polygons in very high spatial resolution aerial imagery. Remote Sens. 2018, 10, 1487. [Google Scholar] [CrossRef] [Green Version]
- Dietrich-Sussner, R.; Davari, A.; Seehaus, T.; Braun, M.; Christlein, V.; Maier, A.; Riess, C. Synthetic Glacier SAR Image Generation from Arbitrary Masks Using Pix2Pix Algorithm. arXiv 2021, arXiv:2101.03252. [Google Scholar]
- Armanious, K.; Jiang, C.; Fischer, M.; Küstner, T.; Hepp, T.; Nikolaou, K.; Gatidis, S.; Yang, B. MedGAN: Medical image translation using GANs. Comput. Med. Imaging Graph. 2020, 79, 101684. [Google Scholar] [CrossRef] [PubMed]
- Qin, C.-Z.; Bao, L.-L.; Zhu, A.X.; Wang, R.-X.; Hu, X.-M. Uncertainty due to DEM error in landslide susceptibility mapping. Int. J. Geogr. Inf. Sci. 2013, 27, 1364–1380. [Google Scholar] [CrossRef]
- Dai, W.; Na, J.; Huang, N.; Hu, G.; Yang, X.; Tang, G.; Xiong, L.; Li, F. Integrated edge detection and terrain analysis for agricultural terrace delineation from remote sensing images. Int. J. Geogr. Inf. Sci. 2020, 34, 484–503. [Google Scholar] [CrossRef]
- Gerçek, D.; Toprak, V.; Strobl, J. Object-based classification of landforms based on their local geometry and geomorphometric context. Int. J. Geogr. Inf. Sci. 2011, 25, 1011–1023. [Google Scholar] [CrossRef]
- Penfound, E.; Vaz, E. Analysis of Wetland Landcover Change in Great Lakes Urban Areas Using Self-Organizing Maps. Remote Sens. 2021, 13, 4960. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
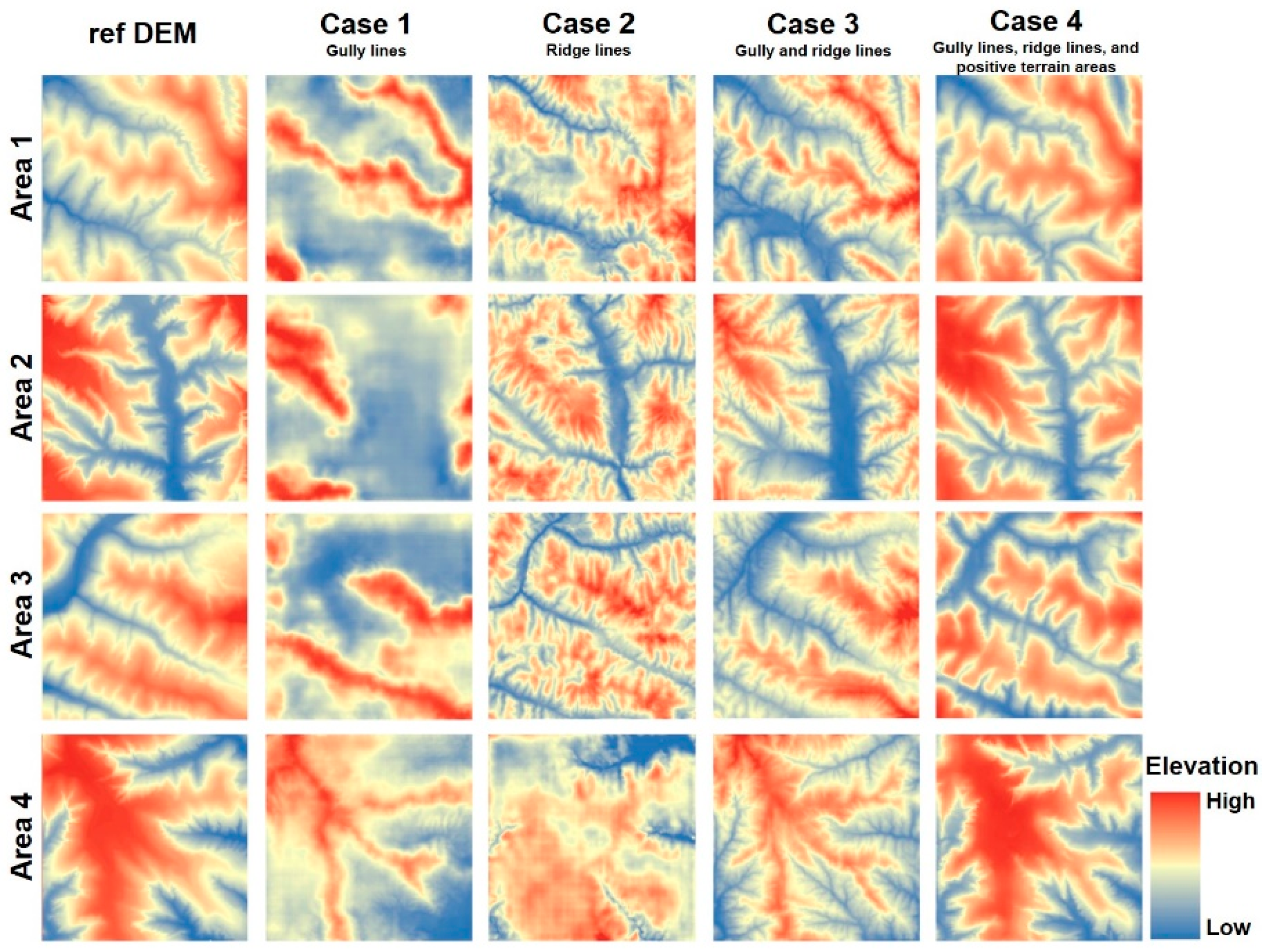
| Component | Terrain Features | |
|---|---|---|
| Case 1 | Single terrain feature | Gully lines |
| Case 2 | Ridge lines | |
| Case 3 | Multiple terrain features | Gully and ridge lines |
| Case 4 | Gully lines, ridge lines, and positive terrain areas |
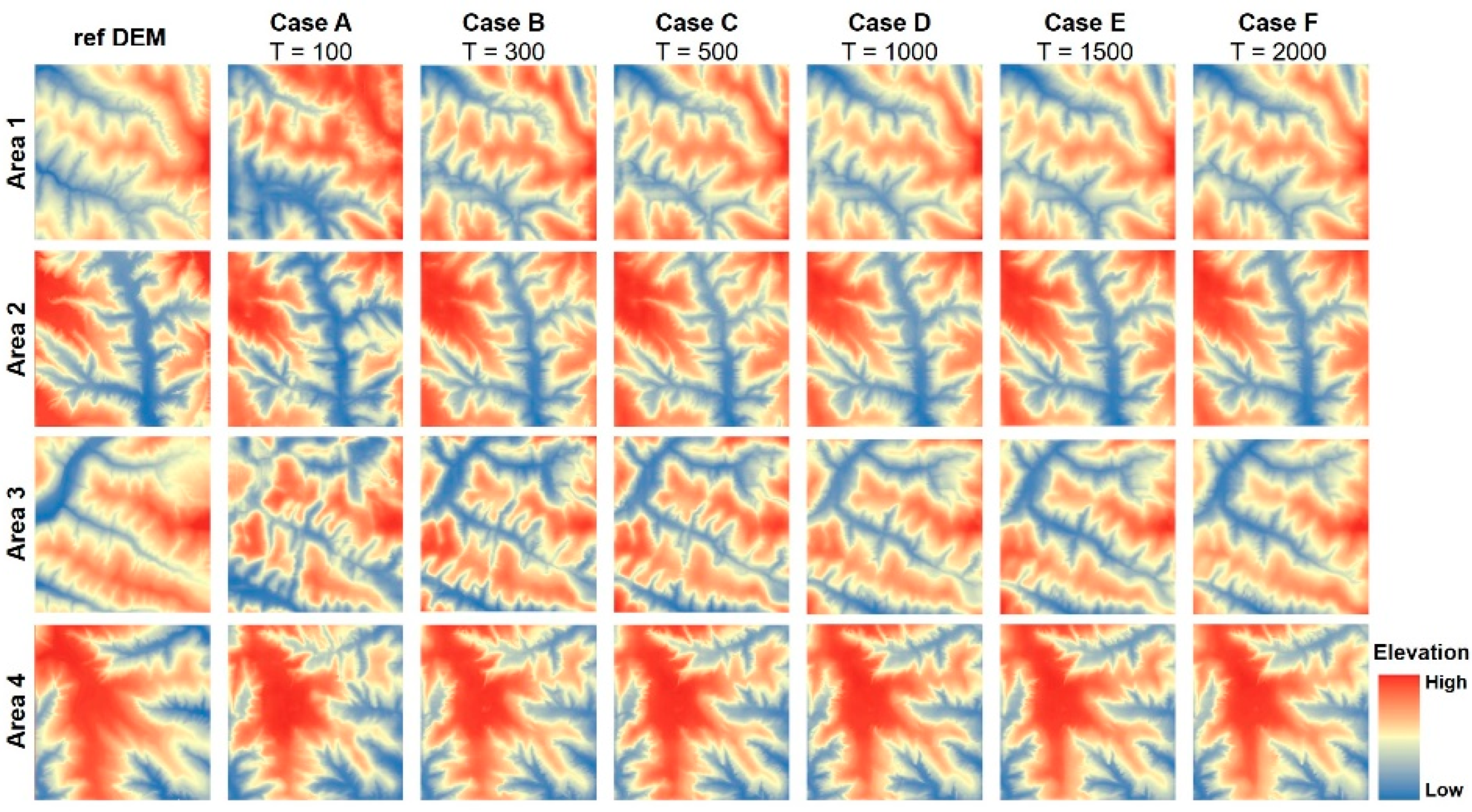
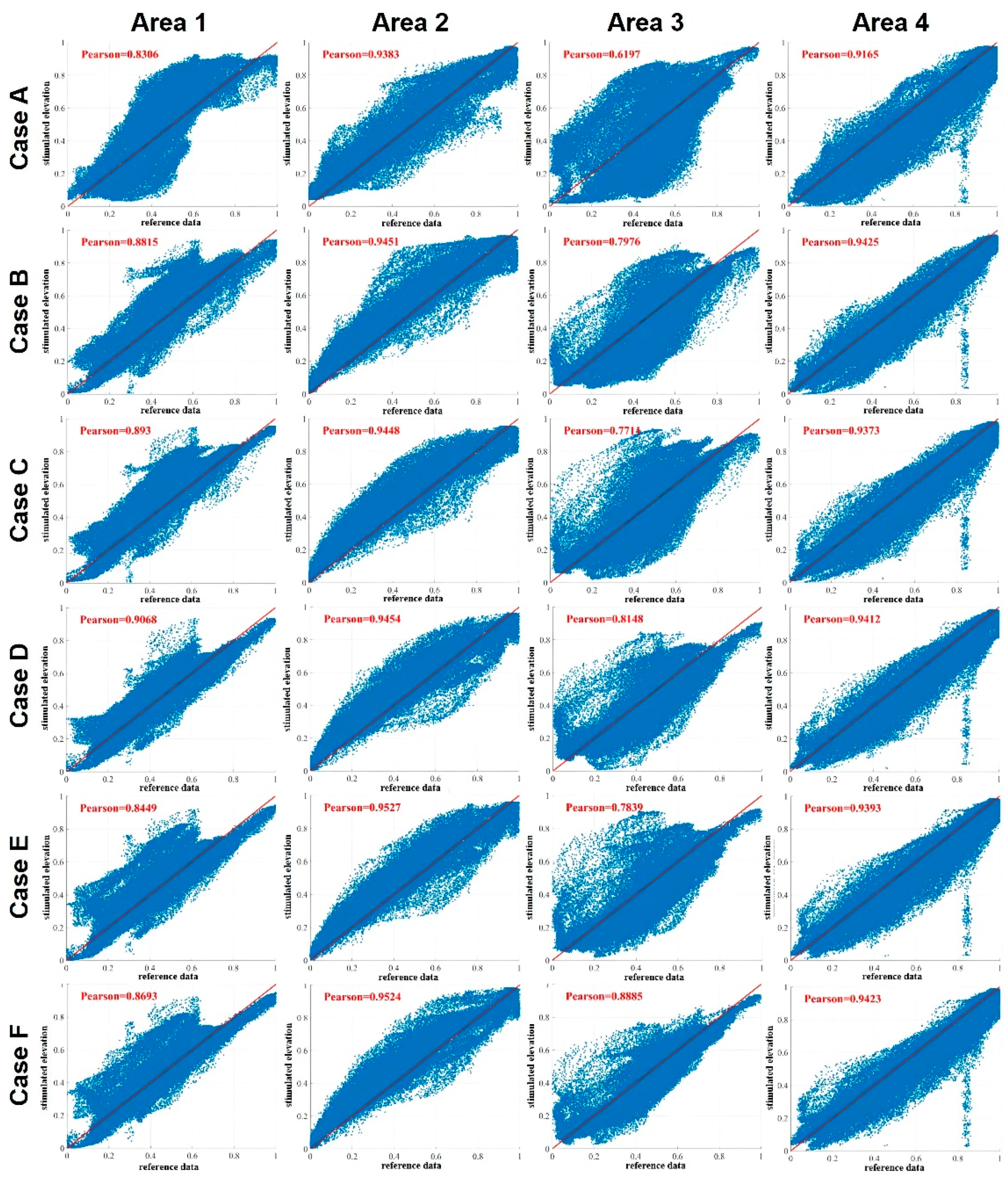
| Threshold (for the Extraction of Line Features) | Terrain Features | |
|---|---|---|
| Case A | 100 | Gully lines, ridge lines, and positive terrain areas |
| Case B | 300 | |
| Case C | 500 | |
| Case D | 1000 | |
| Case E | 1500 | |
| Case F | 2000 |
| Mean | Median | Standard Deviation | Maximum | ||
|---|---|---|---|---|---|
| Area 1 | Ref DEM | 30.91 | 29.69 | 12.46 | 82.55 |
| Case A | 34.29 | 35.26 | 14.29 | 70.76 | |
| Case B | 37.61 | 38.13 | 14.56 | 72.45 | |
| Case C | 36.10 | 36.34 | 14.20 | 73.49 | |
| Case D | 33.11 | 32.99 | 13.03 | 71.68 | |
| Case E | 32.68 | 32.31 | 12.39 | 72.38 | |
| Case F | 33.09 | 32.63 | 12.47 | 73.02 | |
| Area 2 | Ref DEM | 38.90 | 41.47 | 20.12 | 85.15 |
| Case A | 39.28 | 40.73 | 18.08 | 77.88 | |
| Case B | 37.28 | 38.93 | 17.44 | 79.70 | |
| Case C | 36.83 | 38.13 | 17.34 | 77.07 | |
| Case D | 35.59 | 36.59 | 16.67 | 75.58 | |
| Case E | 36.05 | 36.87 | 17.08 | 77.92 | |
| Case F | 35.41 | 36.09 | 16.72 | 76.09 | |
| Area 3 | Ref DEM | 32.34 | 32.31 | 13.64 | 84.71 |
| Case A | 42.22 | 44.49 | 17.29 | 81.61 | |
| Case B | 41.35 | 43.21 | 16.75 | 77.87 | |
| Case C | 41.43 | 43.59 | 16.61 | 77.86 | |
| Case D | 36.41 | 37.41 | 14.38 | 75.08 | |
| Case E | 36.68 | 37.79 | 14.22 | 75.88 | |
| Case F | 33.63 | 34.04 | 13.21 | 70.76 | |
| Area 4 | Ref DEM | 32.99 | 32.51 | 17.59 | 86.90 |
| Case A | 37.46 | 38.58 | 18.59 | 78.66 | |
| Case B | 37.50 | 38.66 | 18.49 | 79.79 | |
| Case C | 38.02 | 39.14 | 19.00 | 79.43 | |
| Case D | 37.48 | 38.13 | 18.60 | 78.80 | |
| Case E | 36.79 | 36.93 | 18.48 | 79.36 | |
| Case F | 35.45 | 35.06 | 17.95 | 78.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Li, K.; Xiong, L.; Tang, G. Generating Terrain Data for Geomorphological Analysis by Integrating Topographical Features and Conditional Generative Adversarial Networks. Remote Sens. 2022, 14, 1166. https://doi.org/10.3390/rs14051166
Li S, Li K, Xiong L, Tang G. Generating Terrain Data for Geomorphological Analysis by Integrating Topographical Features and Conditional Generative Adversarial Networks. Remote Sensing. 2022; 14(5):1166. https://doi.org/10.3390/rs14051166
Chicago/Turabian StyleLi, Sijin, Ke Li, Liyang Xiong, and Guoan Tang. 2022. "Generating Terrain Data for Geomorphological Analysis by Integrating Topographical Features and Conditional Generative Adversarial Networks" Remote Sensing 14, no. 5: 1166. https://doi.org/10.3390/rs14051166
APA StyleLi, S., Li, K., Xiong, L., & Tang, G. (2022). Generating Terrain Data for Geomorphological Analysis by Integrating Topographical Features and Conditional Generative Adversarial Networks. Remote Sensing, 14(5), 1166. https://doi.org/10.3390/rs14051166