
Eastern Arctic Sea Ice Sensing: First Results from the RADARSAT Constellation Mission Data




Abstract
:1. Introduction
2. Sea Ice Classification Background
3. Study Area and Data Set
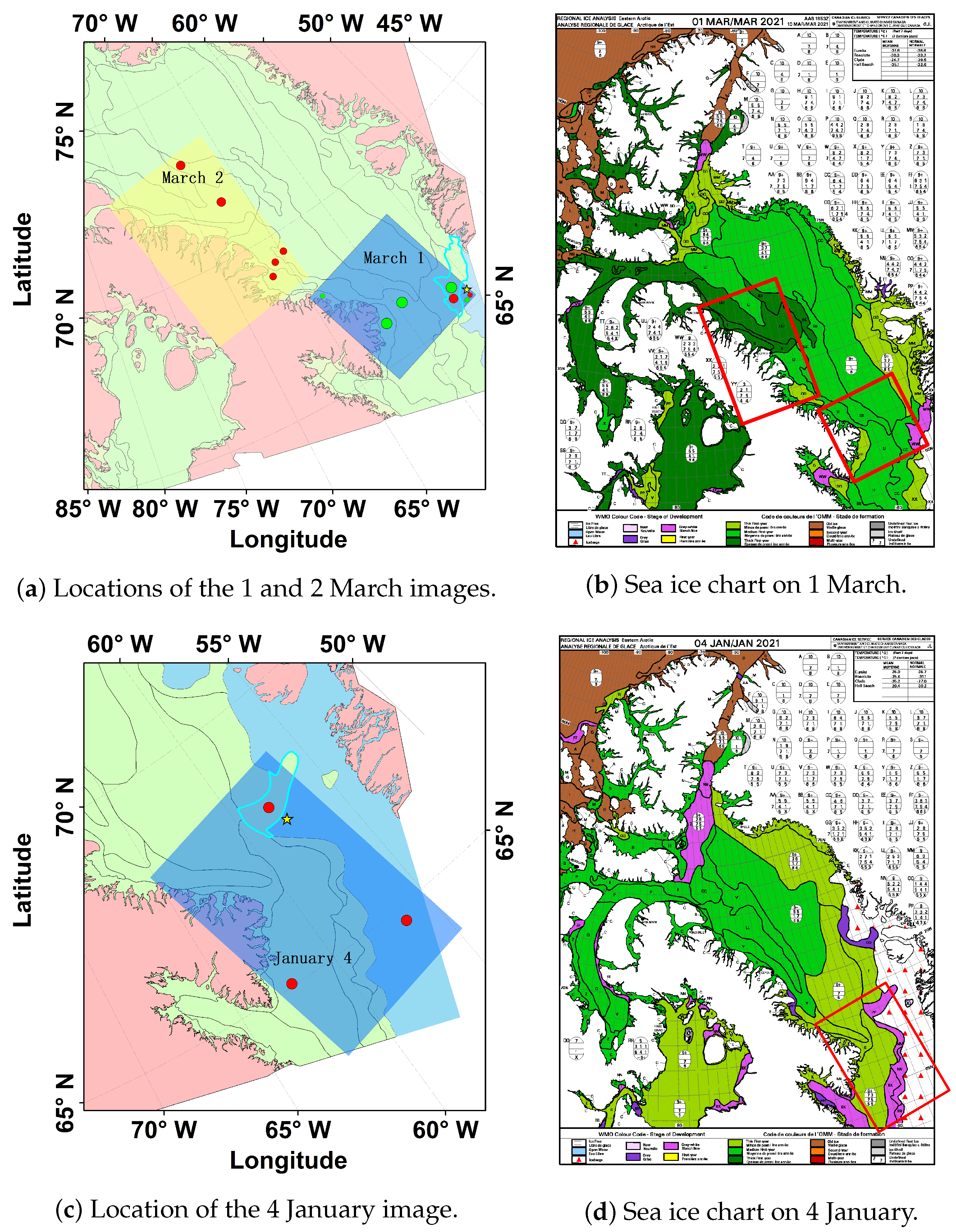
3.1. Study Area
3.2. Sea Ice Chart
3.3. RCM Data and Sea State Information
3.4. Training and Validation
4. Methodology
4.1. Preprocessing
4.2. Normalizer-Free ResNet
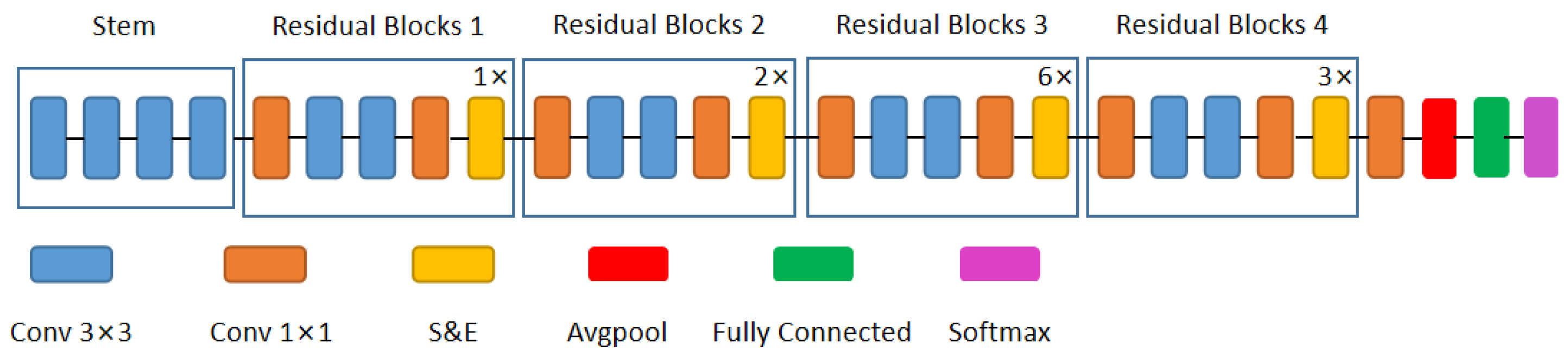
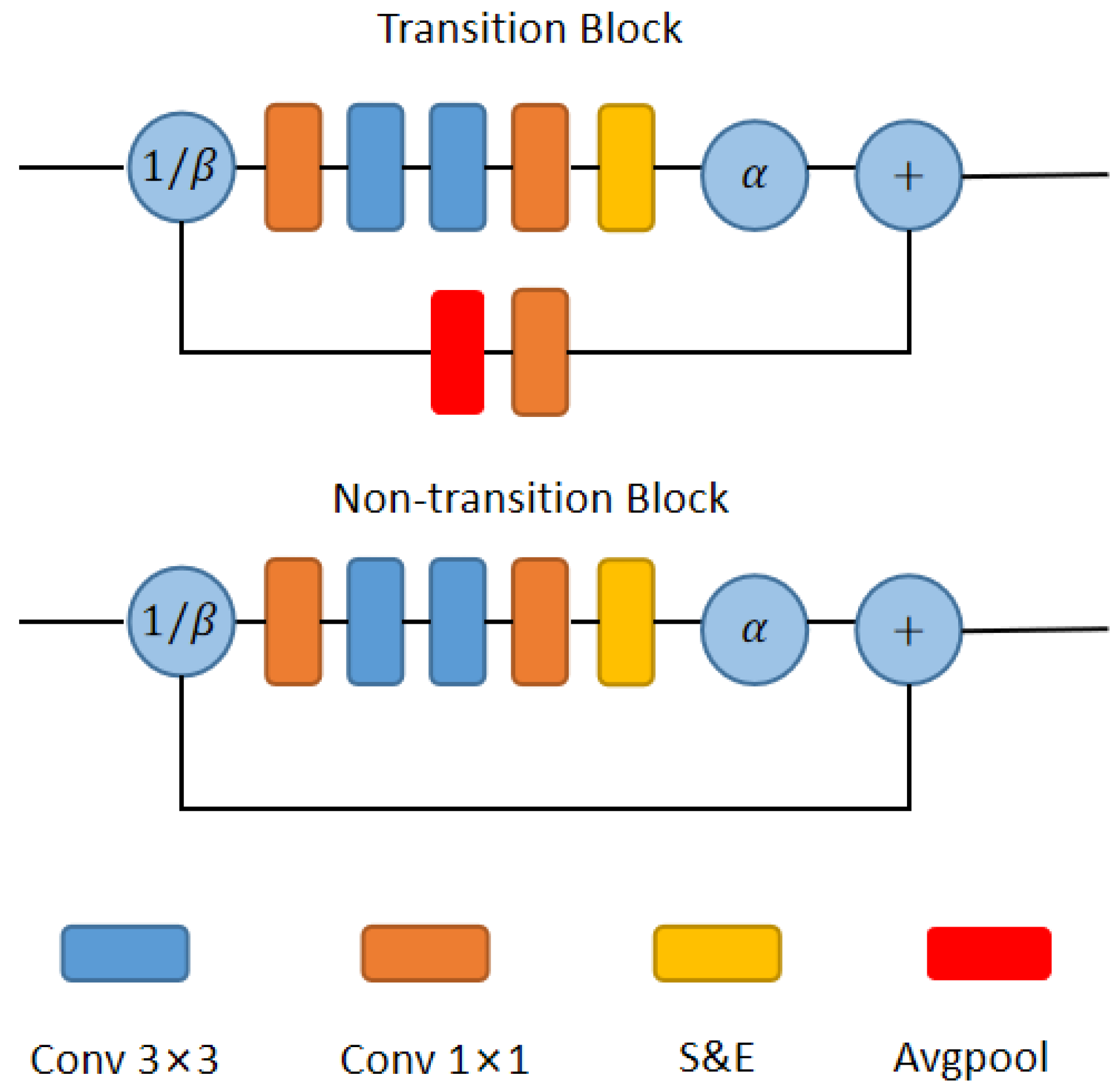
4.2.1. Normalizer-Free ResNet Architecture
4.2.2. Adaptive Gradient Clipping
4.2.3. Preprocessing of the Inputs
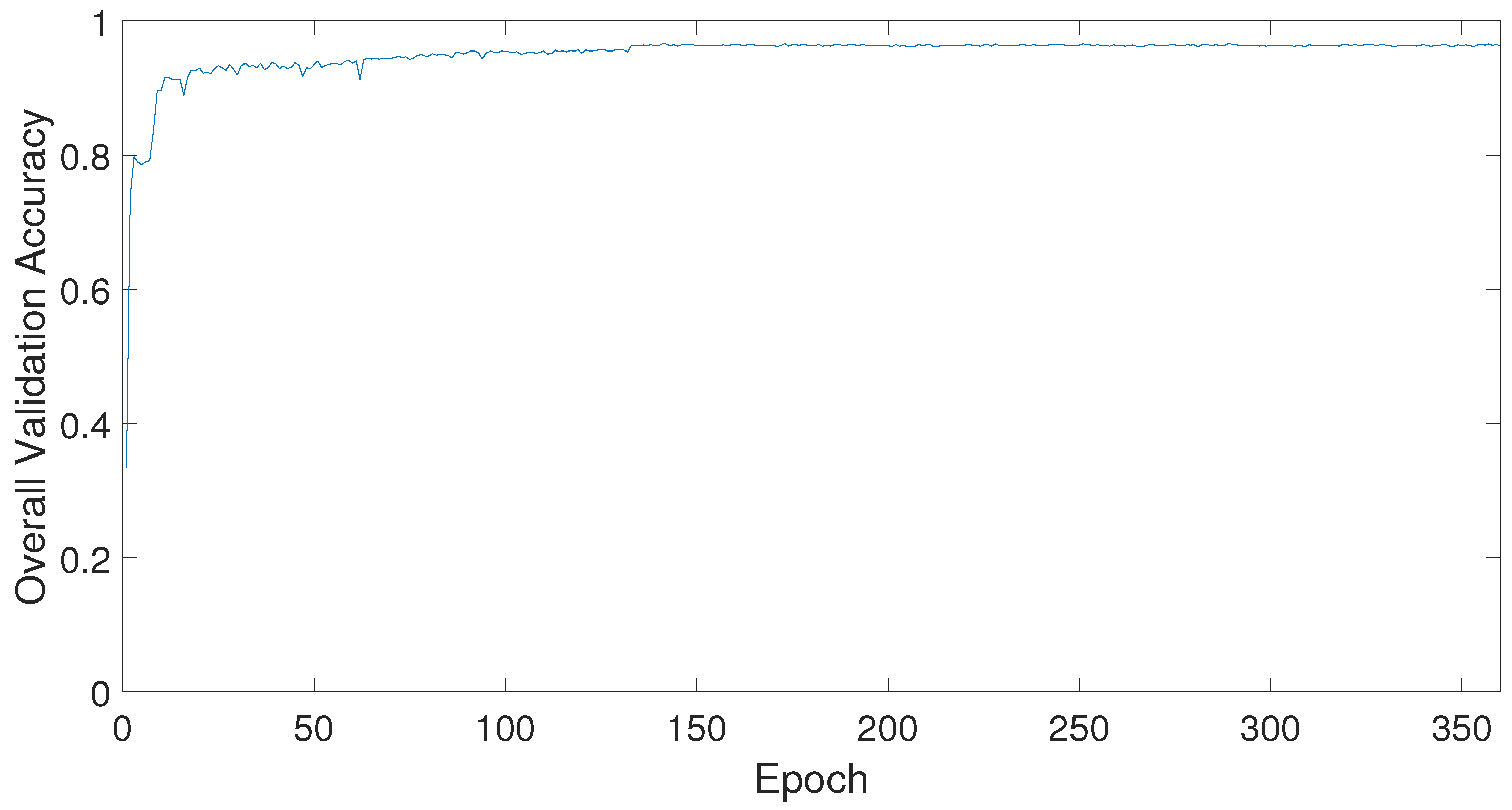
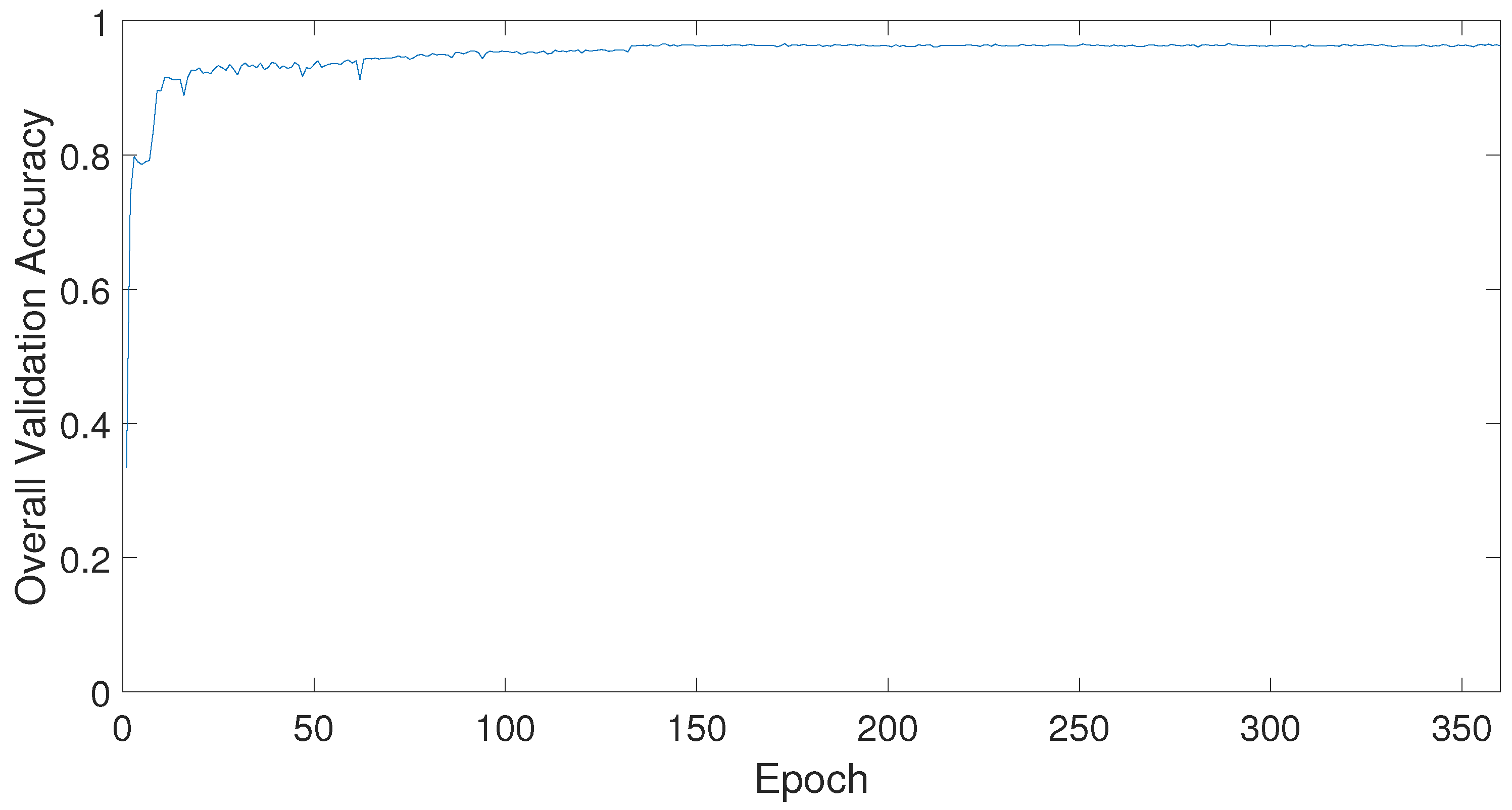
4.2.4. Training Strategy
4.3. Random Forest
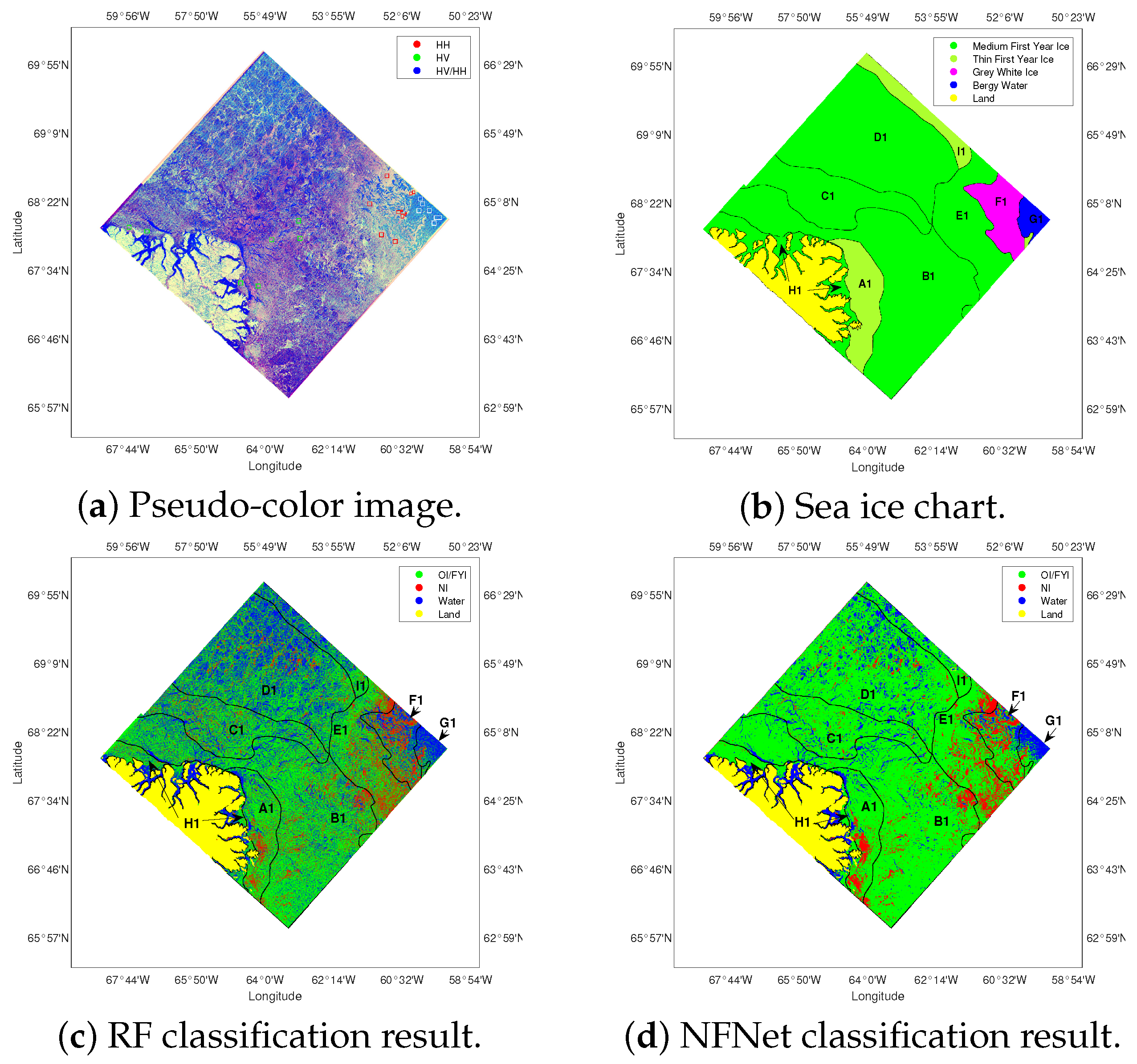
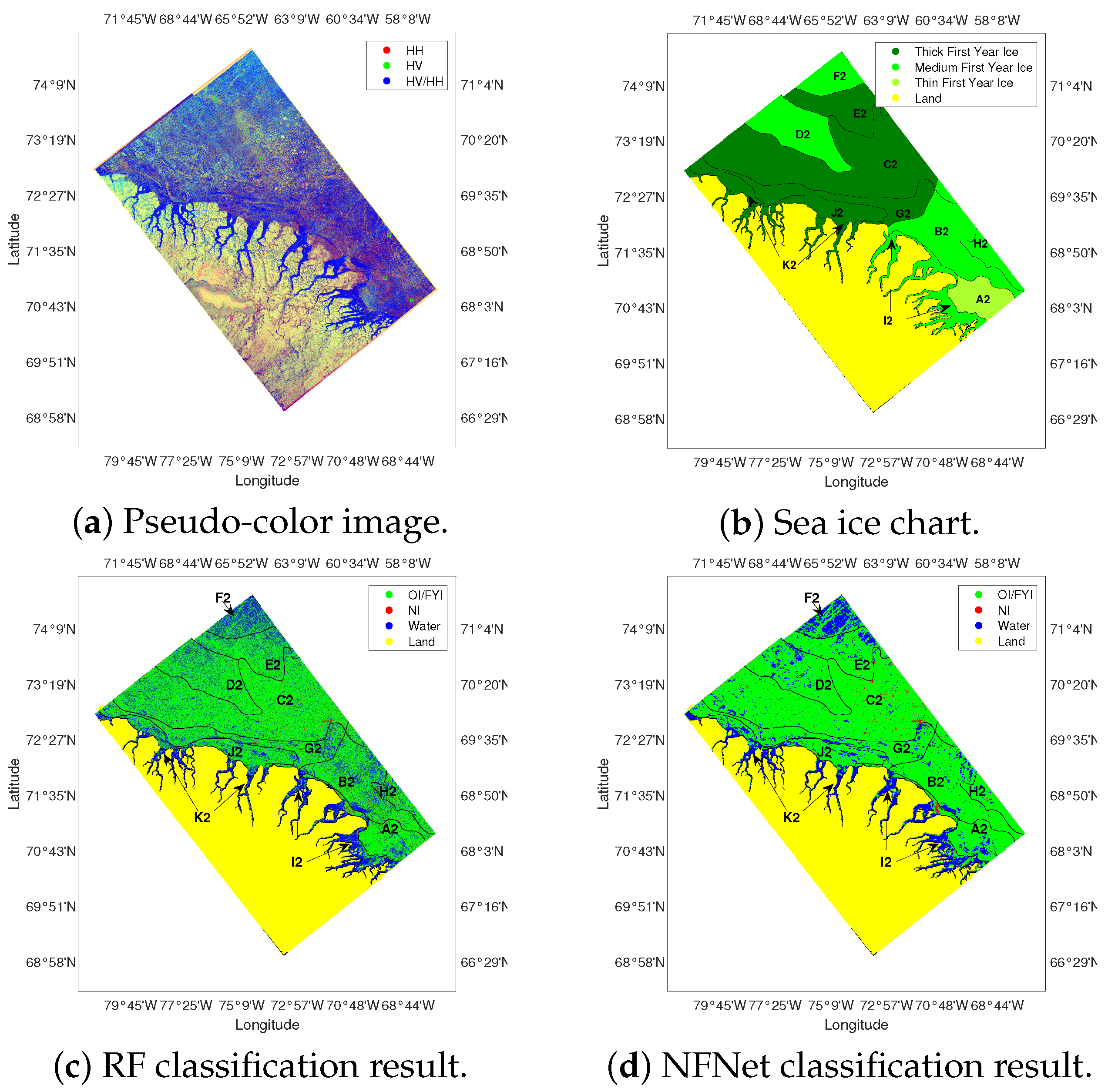
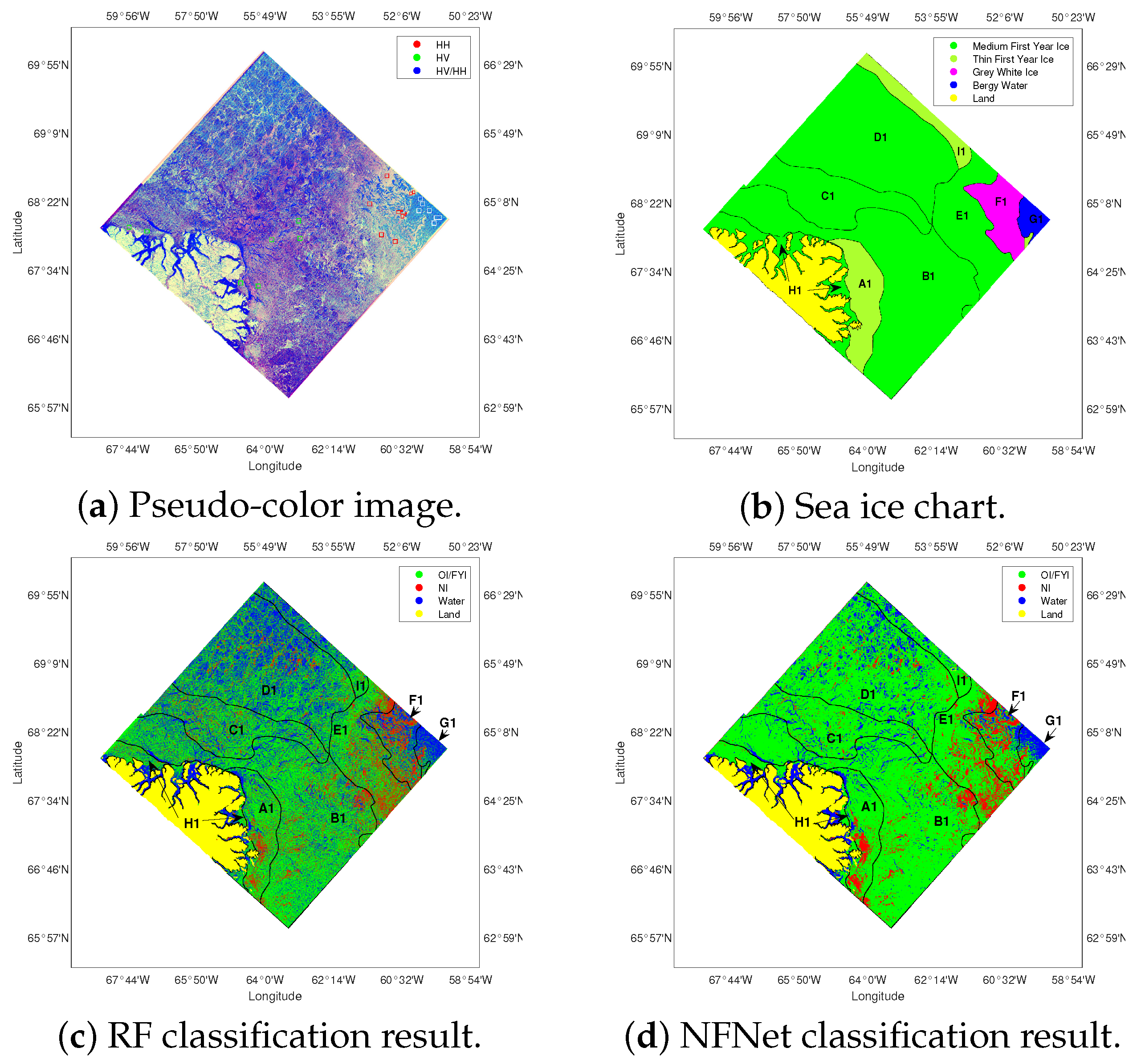
5. Experiment Result
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dierking, W. Sea ice monitoring by synthetic aperture radar. Oceanography 2013, 26, 100–111. [Google Scholar] [CrossRef]
- Zakhvatkina, N.; Smirnov, V.; Bychkova, I. Satellite SAR data-based sea ice classification: An overview. Geosciences 2019, 9, 152. [Google Scholar] [CrossRef] [Green Version]
- Yan, Q.; Huang, W. Spaceborne GNSS-R sea ice detection using delay-doppler maps: First results from the U.K. TechDemoSat-1 mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Lu, J.; Heygster, G.; Spreen, G. Atmospheric correction of sea ice concentration retrieval for 89 GHz AMSR-E observations. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 1442–1457. [Google Scholar] [CrossRef]
- Lindell, D.B.; Long, D.G. Multiyear Arctic sea ice classification using OSCAT and QuikSCAT. IEEE Trans. Geosci. Remote Sens. 2016, 54, 167–175. [Google Scholar] [CrossRef]
- Alexander, D.; Fraser, R.A.M.; Michael, K.J. Generation of high-resolution East Antarctic landfast sea-ice maps from cloud-free MODIS satellite composite imagery. Remote Sens. Environ. 2010, 114, 2888–2896. [Google Scholar]
- Yan, Q.; Huang, W. Sea ice remote sensing using GNSS-R: A review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef] [Green Version]
- Thompson, A.A. Overview of the RADARSAT Constellation Mission. Can. J. Remote Sens. 2015, 41, 401–407. [Google Scholar] [CrossRef]
- Raney, R.K.; Brisco, B.; Dabboor, M.; Mahdianpari, M. RADARSAT Constellation Mission’s operational polarimetric modes: A user-driven radar architecture. Can. J. Remote Sens. 2021, 47, 1–16. [Google Scholar] [CrossRef]
- Brisco, B.; Mahdianpari, M.; Mohammadimanesh, F. Hybrid compact polarimetric SAR for environmental monitoring with the RADARSAT Constellation Mission. Remote Sens. 2020, 12, 3283. [Google Scholar] [CrossRef]
- Huntley, D.; Rotheram-Clarke, D.; Pon, A.; Tomaszewicz, A.; Leighton, J.; Cocking, R.; Joseph, J. Benchmarked RADARSAT-2, SENTINEL-1 and RADARSAT Constellation Mission change-detection monitoring at North Slide, Thompson River Valley, British Columbia: Ensuring a landslide-resilient national railway network. Can. J. Remote Sens. 2021, 47, 635–656. [Google Scholar] [CrossRef]
- Choe, B.H.; Blais-Stevens, A.; Samsonov, S.; Dudley, J. Sentinel-1 and RADARSAT Constellation Mission InSAR assessment of slope movements in the Southern Interior of British Columbia, Canada. Remote Sens. 2021, 13, 3999. [Google Scholar] [CrossRef]
- Howell, S.E.L.; Brady, M.; Komarov, A.S. Large-scale sea ice motion from Sentinel-1 and the RADARSAT Constellation Mission. Cryosphere Discuss. 2021, 2021, 1–20. [Google Scholar] [CrossRef]
- De Roda Husman, S. Polarimetric SAR Signals of River Ice Breakup. Master’s Thesis, Civil Engineering and Geosciences, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar]
- Komarov, A.S.; Buehner, M. Sea ice concentration from the RADARSAT Constellation Mission for numerical sea ice prediction. In Proceedings of the IEEE 19th International Symposium on Antenna Technology and Applied Electromagnetics, Winnipeg, MB, Canada, 8–11 August 2021; pp. 1–2. [Google Scholar]
- Kruk, R.; Fuller, M.C.; Komarov, A.S.; Isleifson, D.; Jeffrey, I. Proof of concept for sea ice stage of development classification using deep learning. Remote Sens. 2020, 12, 2486. [Google Scholar] [CrossRef]
- Dabboor, M.; Geldsetzer, T. Towards sea ice classification using simulated RADARSAT Constellation Mission compact polarimetric SAR imagery. Remote Sens. Environ. 2014, 140, 189–195. [Google Scholar] [CrossRef]
- Ren, P.; Yu, Z.Q.; Dong, G.S.; Wang, G.X.; Wei, K. Sea ice classification with first-order logic refined sliding bagging. J. Coast. Res. 2019, 90, 129–134. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, H.; Gu, X.; Guo, H.; Chen, J.; Liu, G. Sea ice classification using TerraSAR-X ScanSAR data with removal of scalloping and interscan banding. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 589–598. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, T.; Zhang, X.; Zhang, J.; Ren, P. Locality preserving fusion of multi-source images for sea-ice classification. Acta Oceanol. Sin. 2019, 38, 129–136. [Google Scholar] [CrossRef]
- Han, H.; Im, J.; Kim, M.; Sim, S.; Kim, J.; Kim, D.j.; Kang, S.H. Retrieval of melt ponds on Arctic multiyear sea ice in summer from TerraSAR-X dual-polarization data using machine learning approaches: A case study in the Chukchi Sea with mid-incidence angle data. Remote Sens. 2016, 8, 57. [Google Scholar] [CrossRef] [Green Version]
- Lohse, J.; Doulgeris, A.; Dierking, W.; Lohse, J.; Doulgeris, A.P.; Dierking, W. An optimal decision-tree design strategy and its application to sea ice classification from SAR imagery. Remote Sens. 2019, 11, 1574. [Google Scholar] [CrossRef] [Green Version]
- Park, J.W.; Korosov, A.A.; Babiker, M.; Won, J.S.; Hansen, M.W.; Kim, H.C. Classification of sea ice types in Sentinel-1 synthetic aperture radar images. Cryosphere 2020, 14, 2629–2645. [Google Scholar] [CrossRef]
- Cooke, C.L.V.; Scott, K.A. Estimating sea ice concentration from SAR: Training convolutional neural networks with passive microwave data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4735–4747. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Rezaee, M.; Mohammadimanesh, F.; Zhang, Y. Very deep convolutional neural networks for complex land cover mapping using multispectral remote sensing imagery. Remote Sens. 2018, 10, 1119. [Google Scholar] [CrossRef] [Green Version]
- Fritzner, S.; Graversen, R.; Christensen, K.H. Assessment of high-resolution dynamical and machine learning models for prediction of sea ice concentration in a regional application. J. Geophys. Res. Ocean. 2020, 125, e2020JC016277. [Google Scholar] [CrossRef]
- Han, Y.; Wei, C.; Zhou, R.; Hong, Z.; Zhang, Y.; Yang, S. Combining 3D-CNN and Squeeze-and-Excitation networks for remote sensing sea ice image classification. Math. Probl. Eng. 2020, 2020, 8065396. [Google Scholar] [CrossRef]
- Khaleghian, S.; Ullah, H.; Kræmer, T.; Hughes, N.; Eltoft, T.; Marinoni, A. Sea ice classification of SAR imagery based on convolution neural networks. Remote Sens. 2021, 13, 1734. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE 25th Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Image Classification on ImageNet. Available online: https://paperswithcode.com/sota/image-classification-on-imagenet (accessed on 1 November 2021).
- Brock, A.; De, S.; Smith, S.L.; Simonyan, K. High-performance large-scale image recognition without normalization. PMLR 2021, 139, 1059–1071. [Google Scholar]
- Ramsay, B.; Manore, M.; Weir, L.; Wilson, K.; Bradley, D. Use of RADARSAT data in the Canadian Ice Service. Can. J. Remote Sens. 1998, 24, 36–42. [Google Scholar] [CrossRef]
- Jobanputra, R.; Clausi, D. Texture analysis using gaussian weighted grey level co-occurrence probabilities. In Proceedings of the First Canadian Conference on Computer and Robot Vision, London, ON, Canada, 17–19 May 2004; pp. 51–57. [Google Scholar]
- Yu, Q.; Clausi, D.A. SAR sea-ice image analysis based on iterative region growing using semantics. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3919–3931. [Google Scholar] [CrossRef]
- Scheuchi, B.; Caves, R.; Flett, D.; De Abreu, R.; Arkett, M.; Cumming, I. The potential of cross-polarization information for operational sea ice monitoring. In Proceedings of the 2004 Envisat & ERS Symposium, Salzburg, Austria, 6–10 September 2004; pp. 1–7. [Google Scholar]
- Gill, J.P.; Yackel, J.J.; Geldsetzer, T. Analysis of consistency in first-year sea ice classification potential of C-band SAR polarimetric parameters. Can. J. Remote Sens. 2014, 39, 101–117. [Google Scholar] [CrossRef]
- Singha, S.; Johansson, M.; Hughes, N.; Hvidegaard, S.M.; Skourup, H. Arctic sea ice characterization using spaceborne fully polarimetric L-, C-, and X-band SAR with validation by airborne measurements. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3715–3734. [Google Scholar] [CrossRef]
- Eriksson, L.E.; Borenäs, K.; Dierking, W.; Berg, A.; Santoro, M.; Pemberton, P.; Karlson, B. Evaluation of new spaceborne SAR sensors for sea-ice monitoring in the Baltic Sea. Can. J. Remote Sens. 2010, 36, S56–S73. [Google Scholar] [CrossRef] [Green Version]
- Johansson, A.M.; King, J.A.; Doulgeris, A.P.; Gerland, S.; Singha, S.; Spreen, G.; Busche, T. Combined observations of Arctic sea ice with near-coincident colocated X-band, C-band, and L-band SAR satellite remote sensing and helicopter-borne measurements. J. Geophys. Res. Ocean. 2017, 122, 669–691. [Google Scholar] [CrossRef] [Green Version]
- Heide-Jørgensen, M.; Stern, H.; Laidre, K. Dynamics of the sea ice edge in Davis Strait. J. Mar. Syst. 2007, 67, 170–178. [Google Scholar] [CrossRef]
- Wu, Y.S.; Hannah, C.; Petrie, B.; Pettipas, R.; Peterson, I.; Prinsenberg, S.; Lee, C.; Moritz, R. Ocean Current and Sea Ice Statistics for Davis Strait; Fisheries and Oceans Canada: St. John’s, NL, Canada, 2013. [Google Scholar]
- Manual of Standard Procedures for Observing and Reporting Ice Conditions, 9th ed.; Canadian Ice Service: Ottawa, ON, Canada, 2005.
- Singha, S.; Johansson, A.M.; Doulgeris, A.P. Robustness of SAR sea ice type classification across incidence angles and seasons at L-band. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9941–9952. [Google Scholar] [CrossRef]
- ERA5 Hourly Data on Single Levels from 1979 to Present. Available online: https://cds.climate.co-\pernicus.eu (accessed on 1 December 2021).
- Weather Information Code Table. Available online: https://www.jodc.go.jp/data_format/weather-code.html (accessed on 25 October 2021).
- Sentinel Application Platform. Available online: http://step.esa.int/main (accessed on 19 October 2020).
- RADARSAT-2 Product Format Definition; MacDonald, Dettwiler and Associates: Richmond, BC, Canada, 2008.
- Lee, J.S.; Wen, J.H.; Ainsworth, T.; Chen, K.S.; Chen, A. Improved sigma filter for speckle filtering of SAR imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 202–213. [Google Scholar]
- Park, J.W.; Korosov, A.A.; Babiker, M.; Sandven, S.; Won, J.S. Efficient thermal noise removal for Sentinel-1 TOPSAR cross-polarization channel. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1555–1565. [Google Scholar] [CrossRef]
- Moik, J.G. Digital Processing of Remotely Sensed Images; NASA: Washington, DC, USA, 1980.
- Bayanudin, A.A.; Jatmiko, R.H. Orthorectification of Sentinel-1 SAR (synthetic aperture radar) data in Some parts of south-eastern Sulawesi using Sentinel-1 toolbox. In Proceedings of the 2nd International Conference of Indonesian Society for Remote Sensing, Yogyakarta, Indonesia, 17–19 October 2016; p. 012007. [Google Scholar]
- Ressel, R.; Frost, A.; Lehner, S. A neural network-based classification for sea ice types on X-band SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3672–3680. [Google Scholar] [CrossRef]
- Chen, S.; Shokr, M.; Li, X.; Ye, Y.; Zhang, Z.; Hui, F.; Cheng, X. MYI floes identification based on the texture and shape feature from dual-polarized Sentinel-1 imagery. Remote Sens. 2020, 12, 3221. [Google Scholar] [CrossRef]
- Leigh, S.; Wang, Z.; Clausi, D.A. Automated ice–water classification using dual polarization SAR satellite imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5529–5539. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea ice sensing from GNSS-R data using convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Song, W.; Li, M.; Gao, W.; Huang, D.; Ma, Z.; Liotta, A.; Perra, C. Automatic sea-ice classification of SAR images based on spatial and temporal features learning. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9887–9901. [Google Scholar] [CrossRef]
- Lyu, H.; Huang, W.; Mahdianpari, M. Sea ice detection from the RADARSAT Constellation Mission experiment data. In Proceedings of the IEEE 34th Canadian Conference on Electrical and Computer Engineering, ON, Canada, 12–17 September 2021; pp. 1–4. [Google Scholar]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google earth engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Soh, L.; Tsatsoulis, C. Texture analysis of SAR sea ice imagery using gray level co-occurrence matrices. IEEE Trans. Geosci. Remote Sens. 1999, 37, 780–795. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Guo, H.; Zhang, L. Sea ice classification using dual polarization SAR data. In Proceedings of the 35th International Symposium on Remote Sensing of Environment, Beijing, China, 22–26 April 2013; p. 012115. [Google Scholar]
- Moen, M.A.N.; Doulgeris, A.P.; Anfinsen, S.N.; Renner, A.H.H.; Hughes, N.; Gerland, S.; Eltoft, T. Comparison of feature based segmentation of full polarimetric SAR satellite sea ice images with manually drawn ice charts. Cryosphere 2013, 7, 1693–1705. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Abbreviation | Thickness | Code |
|---|---|---|---|
| New ice | NI | <10 cm | 1 |
| Gray ice | GI | 10–15 cm | 4 |
| Gray-white ice | GWI | 15–30 cm | 5 |
| First-year ice | FYI | ≥30 cm | 6 |
| Thin first-year ice | TFYI | 30–70 cm | 7 |
| Medium first-year ice | MFYI | 70–120 cm | 1 |
| Thick first-year ice | TKFYI | >120 cm | 4 |
| Old ice | OI | - | 7 |
| Attributes | 1st RCM Image | 2nd RCM Image | 3rd RCM Image |
|---|---|---|---|
| Time | 2021/3/1 | 2021/3/2 | 2021/1/4 |
| Satellite | RCM-3 | RCM-2 | RCM-1 |
| Beam Mode | Medium Resolution 50 m | ||
| Pixel Spacing | 20 m | ||
| Polarizations | HH HV | ||
| Incidence Angle | 26.85°–50.90° | 34.07°–55.08° | 26.87°–50.96° |
| Spatial Coverage | 384.88 km × 362.46 km | 570.64 km × 363.94 km | 564.06 km × 363.3 km |
| Latitude | 64.57 N–68.55 N | 67.87 N–73.47 N | 63.31 N–68.9 N |
| Longitude | 55.19 W–64.98 W | 64.14 W–76.84 W | 54.77 W–65.22 W |
| Stage | NFNet-F0 | Number of Blocks |
|---|---|---|
| Stem | conv, 3 × 3, 16 conv, 3 × 3, 32 conv, 3 × 3, 64 conv, 3 × 3, 128 | ×1 |
| Residual Blocks 1 | conv, 1 × 1, 128 conv, 3 × 3, 128 conv, 3 × 3, 128 conv, 1 × 1, 256 SE | ×1 |
| Residual Blocks 2 | conv, 1 × 1, 256 conv, 3 × 3, 256 conv, 3 × 3, 256 conv, 1 × 1, 512 SE | ×2 |
| Residual Blocks 3 | conv, 1 × 1, 768 conv, 3 × 3, 768 conv, 3 × 3, 768 conv, 1 × 1, 1536 SE | ×6 |
| Residual Blocks 4 | conv, 1 × 1, 768 conv, 3 × 3, 768 conv, 3 × 3, 768 conv, 1 × 1, 1536 SE | ×3 |
| Fully Connected | Average pool, fully connected, softmax | |
| Parameters | 1st-Level RF | 2nd-Level RF |
|---|---|---|
| Number of trees | 500 | 500 |
| Maximum tree depth | 15 | 8 |
| Maximum features | 6 | 5 |
| Minimum samples-split | 50 | 50 |
| Minimum samples-leaf | 10 | 10 |
| Region | Area Ratio | Results | OI/FYI | NI | Total Concentration | |||
|---|---|---|---|---|---|---|---|---|
| OI | MFYI | TFYI | GWI | GI | ||||
| A1 | 90.2% | Chart | 0 | 0 | 60% | 30% | 10% | 90%+ |
| RF | 67.2% | 16% | 83.2% | |||||
| NFNet | 77.2% | 15.5% | 92.7% | |||||
| B1 | 50.2% | Chart | 0 | 90% | 0 | 0 | 0 | 90%+ |
| RF | 69.9% | 9.7% | 79.6% | |||||
| NFNet | 88.7% | 6.1% | 94.8% | |||||
| C1 | 25.1% | Chart | 20% | 80% | 0 | 0 | 0 | 90%+ |
| RF | 63.2% | 9.8% | 73% | |||||
| NFNet | 86.5% | 4% | 90.5% | |||||
| D1 | 26.4% | Chart | 0 | 90%+ | 0 | 0 | 0 | 90%+ |
| RF | 54.1% | 6.9% | 61% | |||||
| NFNet | 81.7% | 3.6% | 85.3% | |||||
| E1 | 41% | Chart | 0 | 60% | 40% | 0 | 0 | 90%+ |
| RF | 60.4% | 26.8% | 87.2% | |||||
| NFNet | 72.6% | 25.2% | 97.8% | |||||
| F1 | 49% | Chart | 0 | 0 | 20% | 30% | 30% | 90% |
| RF | 38.1% | 32.2% | 70.3% | |||||
| NFNet | 51.8% | 33.7% | 85.5% | |||||
| G1 | 0.1% | Chart | 0 | 0 | 0 | 0 | 0 | <10% |
| RF | 29% | 7.3% | 36.3% | |||||
| NFNet | 33.6% | 6.8% | 40.4% | |||||
| H1 | 35.3% | Chart | 0 | 100% | 0 | 0 | 0 | 100% |
| RF | 47.3% | 6.2% | 53.5% | |||||
| NFNet | 52.4% | 3.3% | 55.7% | |||||
| I1 | 10% | Chart | 0 | 30% | 70% | 0 | 0 | 90%+ |
| RF | 54.1% | 5.1% | 59.2% | |||||
| NFNet | 79.1% | 1.8% | 80.9% | |||||
| Region | Area Ratio | Results | OI/FYI | NI | Total Concentration | |||
|---|---|---|---|---|---|---|---|---|
| OI | TKFYI | MFYI | TFYI | |||||
| A2 | 79% | Chart | 0 | 0 | 30% | 70% | 0 | 90%+ |
| RF | 83.1% | 3.1% | 86.2% | |||||
| NFNet | 87.3% | 0.3% | 87.6% | |||||
| B2 | 19.3% | Chart | 0 | 0 | 90%+ | 0 | 0 | 90%+ |
| RF | 72.9% | 4.8% | 77.7% | |||||
| NFNet | 90.5% | 0.2% | 90.7% | |||||
| C2 | 77.2% | Chart | 20% | 40% | 40% | 0 | 0 | 90%+ |
| RF | 84.8% | 2.2% | 87% | |||||
| NFNet | 94.7% | 1.5% | 96.2% | |||||
| D2 | 29% | Chart | 0 | 0 | 90%+ | 0 | 0 | 90%+ |
| RF | 81.1% | 0.6% | 81.7% | |||||
| NFNet | 89.2% | 0.2% | 89.4% | |||||
| E2 | 46.6% | Chart | 0 | 50% | 50% | 0 | 0 | 90%+ |
| RF | 77.1% | 0.4% | 77.5% | |||||
| NFNet | 87.2% | 0.3% | 87.5% | |||||
| F2 | 4.4% | Chart | 0 | 30% | 70% | 0 | 0 | 90%+ |
| RF | 52.3% | 0.2% | 52.5% | |||||
| NFNet | 46% | 0.5% | 46.5% | |||||
| G2 | 88.6% | Chart | 0 | 50% | 50% | 0 | 0 | 90%+ |
| RF | 75.8% | 2.4% | 78.2% | |||||
| NFNet | 87.2% | 0.4% | 87.6% | |||||
| H2 | 7.1% | Chart | 20% | 0 | 80% | 0 | 0 | 90%+ |
| RF | 74.5% | 6.3% | 80.8% | |||||
| NFNet | 95% | 1.2% | 96.2% | |||||
| I2 | 42.9% | Chart | 0 | 0 | 100% | 0 | 0 | 100% |
| RF | 30.5% | 2.1% | 32.6% | |||||
| NFNet | 40.4% | 3.2% | 43.6% | |||||
| J2 | 99.6% | Chart | 0 | 100% | 0 | 0 | 0 | 100% |
| RF | 70.9% | 0.9% | 71.8% | |||||
| NFNet | 74.8% | <0.1% | 74.8% | |||||
| K2 | 11.7% | Chart | 0 | 100% | 0% | 0 | 0 | 100% |
| RF | 26.5% | 0.7% | 27.2% | |||||
| NFNet | 36.9% | 2.3% | 39.2% | |||||
| Region | Area Ratio | Results | OI/FYI | NI | Total Concentration | ||
|---|---|---|---|---|---|---|---|
| TFYI | GWI | GI | NI | ||||
| A3 | 30.8% | Chart | 0 | 0 | 0 | 0 | <10% |
| RF | 21.6% | 1.7% | 23.3% | ||||
| NFNet | 16% | 2.6% | 18.6% | ||||
| B3 | 86.5% | Chart | 0 | 30% | 30% | 20% | 80% |
| RF | 68.3% | 19.2% | 87.5% | ||||
| NFNet | 50.8% | 46.2% | 97% | ||||
| C3 | 66.2% | Chart | 70% | 30% | 0 | 0 | 90%+ |
| RF | 69.5% | 24% | 93.5% | ||||
| NFNet | 33% | 63.6% | 96.6% | ||||
| D3 | 100% | Chart | 0 | 50% | 20% | 20% | 90% |
| RF | 69.3% | 24.6% | 93.9% | ||||
| NFNet | 27.5% | 66.9% | 94.4% | ||||
| E3 | 87.8% | Chart | 20% | 70% | 10% | 0 | 90%+ |
| RF | 87.4% | 9.2% | 96.6% | ||||
| NFNet | 45.8% | 53.5% | 99.3% | ||||
| F3 | 67.5% | Chart | 0 | 30% | 10% | 10% | 50% |
| RF | 82.3% | 8.3% | 90.6% | ||||
| NFNet | 69.5% | 15.3% | 84.8% | ||||
| G3 | 92.3% | Chart | 70% | 30% | 0 | 0 | 90%+ |
| RF | 89% | 3% | 92% | ||||
| NFNet | 78.6% | 17.5% | 96.1% | ||||
| H3 | 27% | Chart | 90%+ | 0 | 0 | 0 | 90%+ |
| RF | 93% | 0.9% | 93.9% | ||||
| NFNet | 93.8% | 5.2% | 99% | ||||
| I3 | 66.2% | Chart | 90%+ | 0 | 0 | 0 | 90%+ |
| RF | 93.9% | 0.6% | 94.5% | ||||
| NFNet | 97.9% | 1% | 98.9% | ||||
| J3 | 22.4% | Chart | 80% | 20% | 0 | 0 | 90%+ |
| RF | 66.2% | 31.4% | 97.6% | ||||
| NFNet | 30.3% | 69.5% | 99.8% | ||||
| K3 | 40.1% | Chart | 100% | 0 | 0 | 0 | 100% |
| RF | 75.9% | 6.1% | 82% | ||||
| NFNet | 65.4% | 7.3% | 72.7% | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, H.; Huang, W.; Mahdianpari, M. Eastern Arctic Sea Ice Sensing: First Results from the RADARSAT Constellation Mission Data. Remote Sens. 2022, 14, 1165. https://doi.org/10.3390/rs14051165
Lyu H, Huang W, Mahdianpari M. Eastern Arctic Sea Ice Sensing: First Results from the RADARSAT Constellation Mission Data. Remote Sensing. 2022; 14(5):1165. https://doi.org/10.3390/rs14051165
Chicago/Turabian StyleLyu, Hangyu, Weimin Huang, and Masoud Mahdianpari. 2022. "Eastern Arctic Sea Ice Sensing: First Results from the RADARSAT Constellation Mission Data" Remote Sensing 14, no. 5: 1165. https://doi.org/10.3390/rs14051165
APA StyleLyu, H., Huang, W., & Mahdianpari, M. (2022). Eastern Arctic Sea Ice Sensing: First Results from the RADARSAT Constellation Mission Data. Remote Sensing, 14(5), 1165. https://doi.org/10.3390/rs14051165