
An Inverse Method for Drop Size Distribution Retrieval from Polarimetric Radar at Attenuating Frequency


Abstract
:1. Introduction
2. Materials and Methods
2.1. X-Band Polarimetric Radar Data
2.2. Optical Disdrometer Data
2.3. Previous Findings from This Dataset
3. Forward Modelling of Polarimetric Radar Observables
3.1. Measured Radar Variables at X-Band
3.2. Polarimetric Radar Observables/Variables
3.3. The Forward Discretized Model between Polarimetric Radar Observables and DSD Parameters
4. The DSD Retrieval from Polarimetric Radar Observations
4.1. Inverse Modeling Framework
4.2. The Vector of Radar Data and Its Covariance Matrix
4.3. A Priori Information: DSD Parameters and Associated Covariance Matrix
4.4. Application Conditions
5. Results
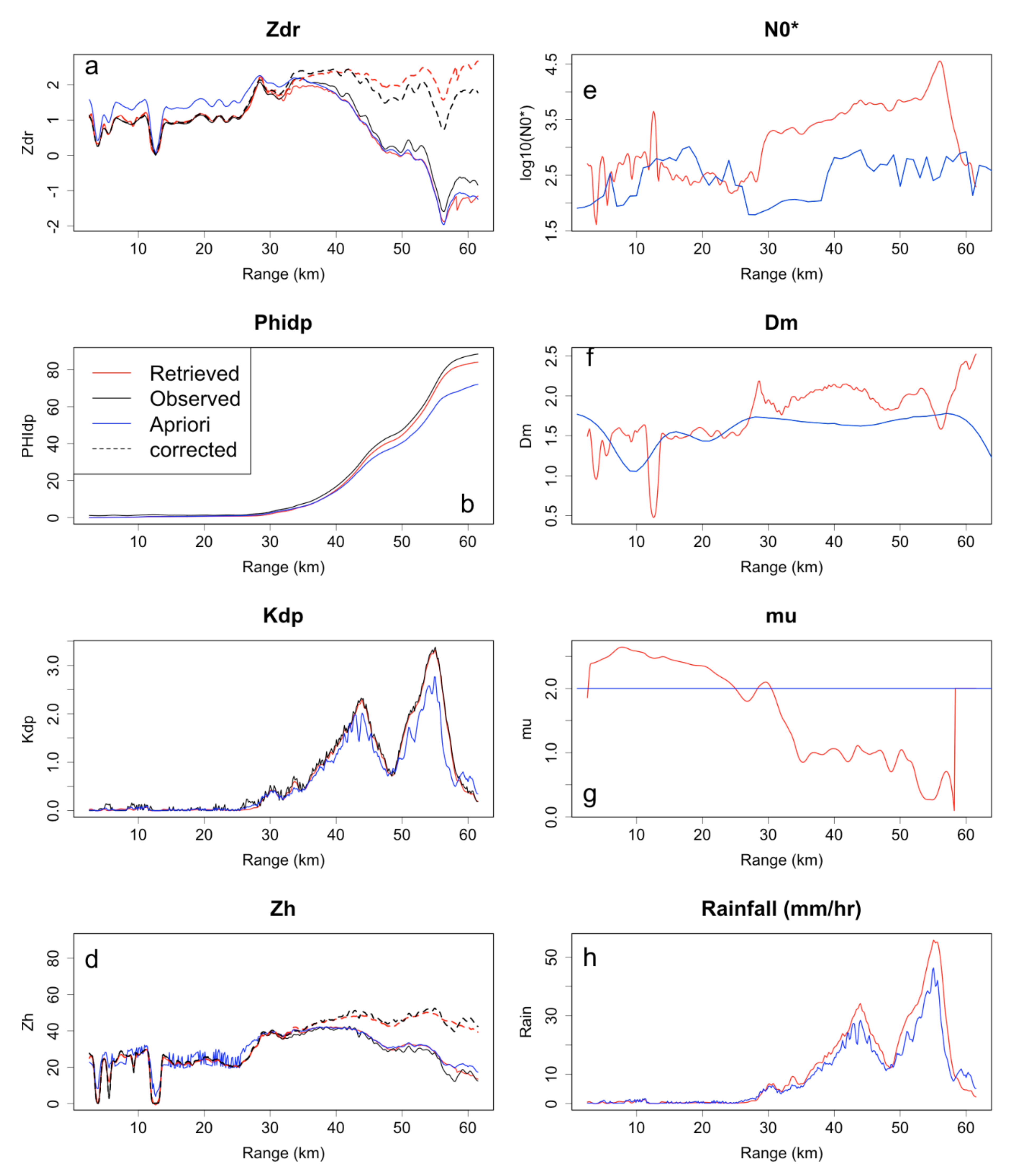
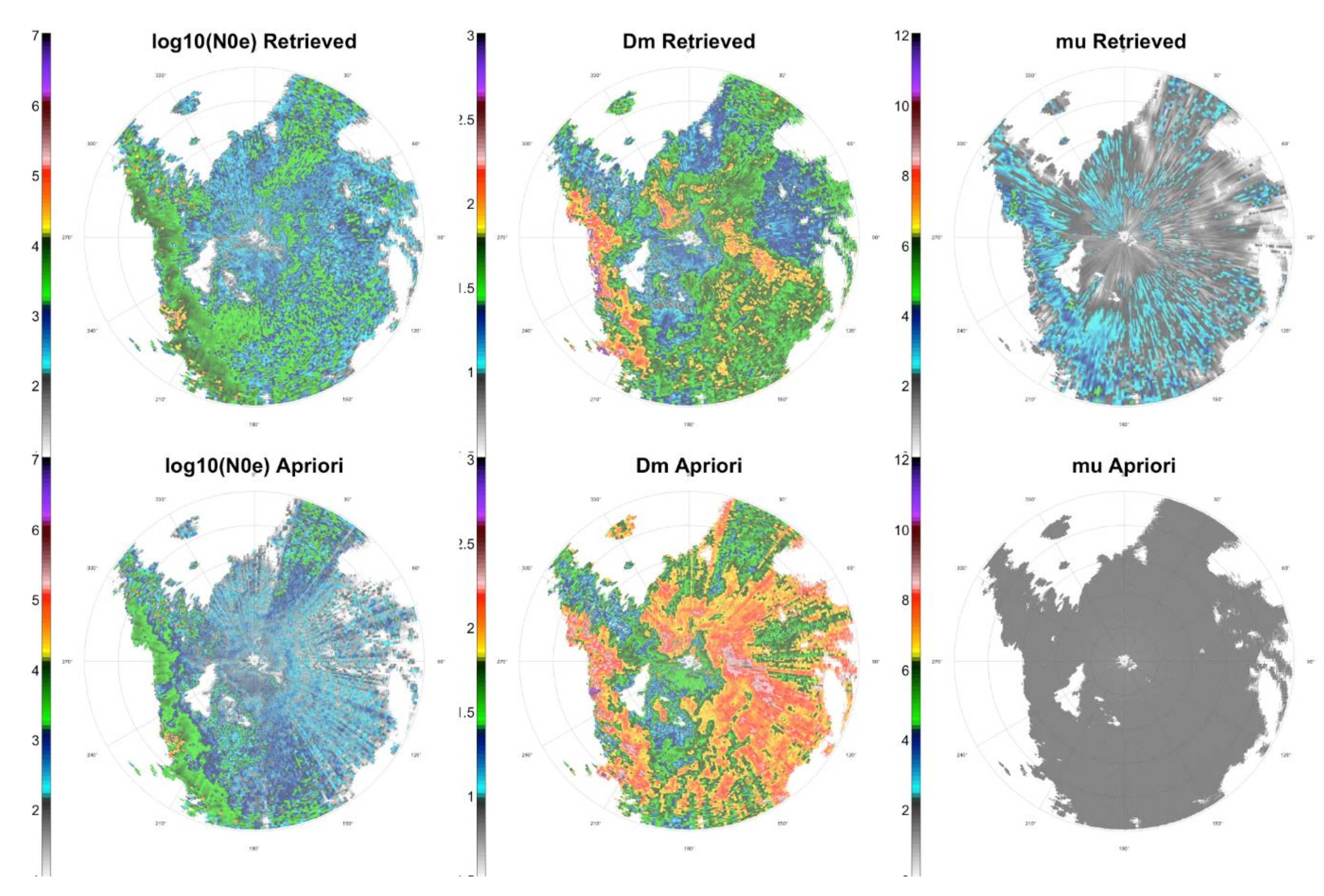
5.1. Retrieved DSD and Gain from an a Priori Solution
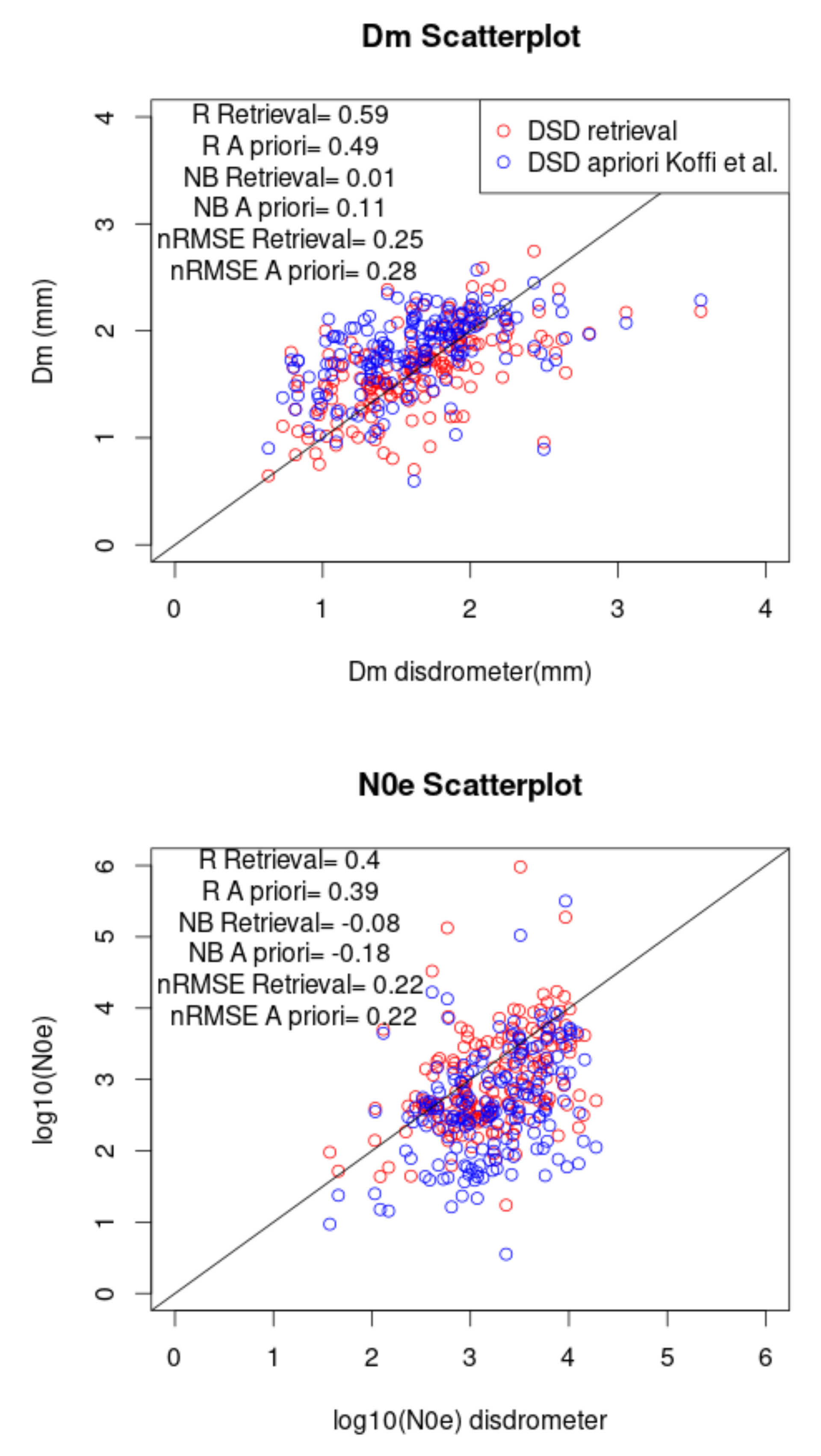
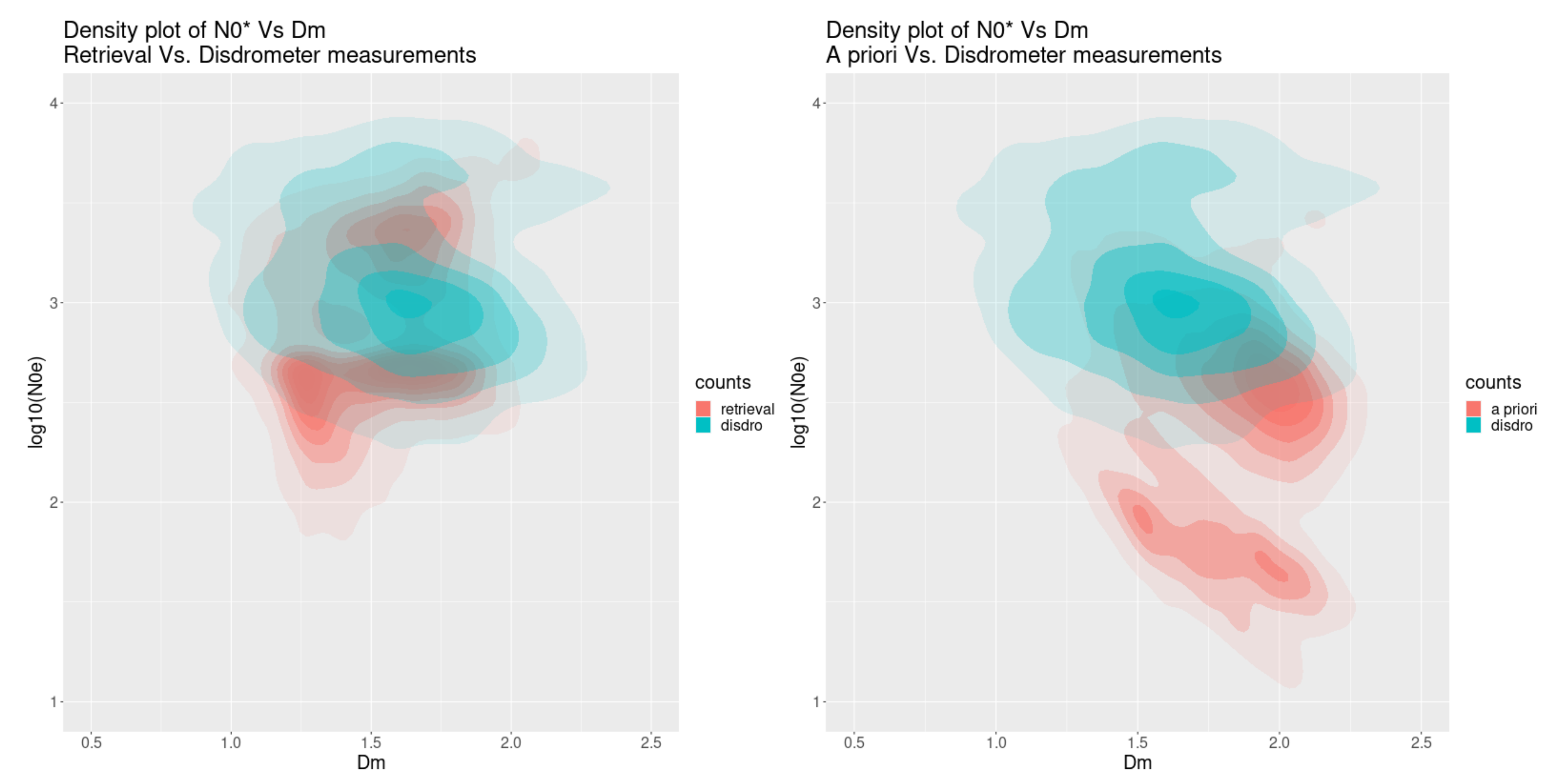
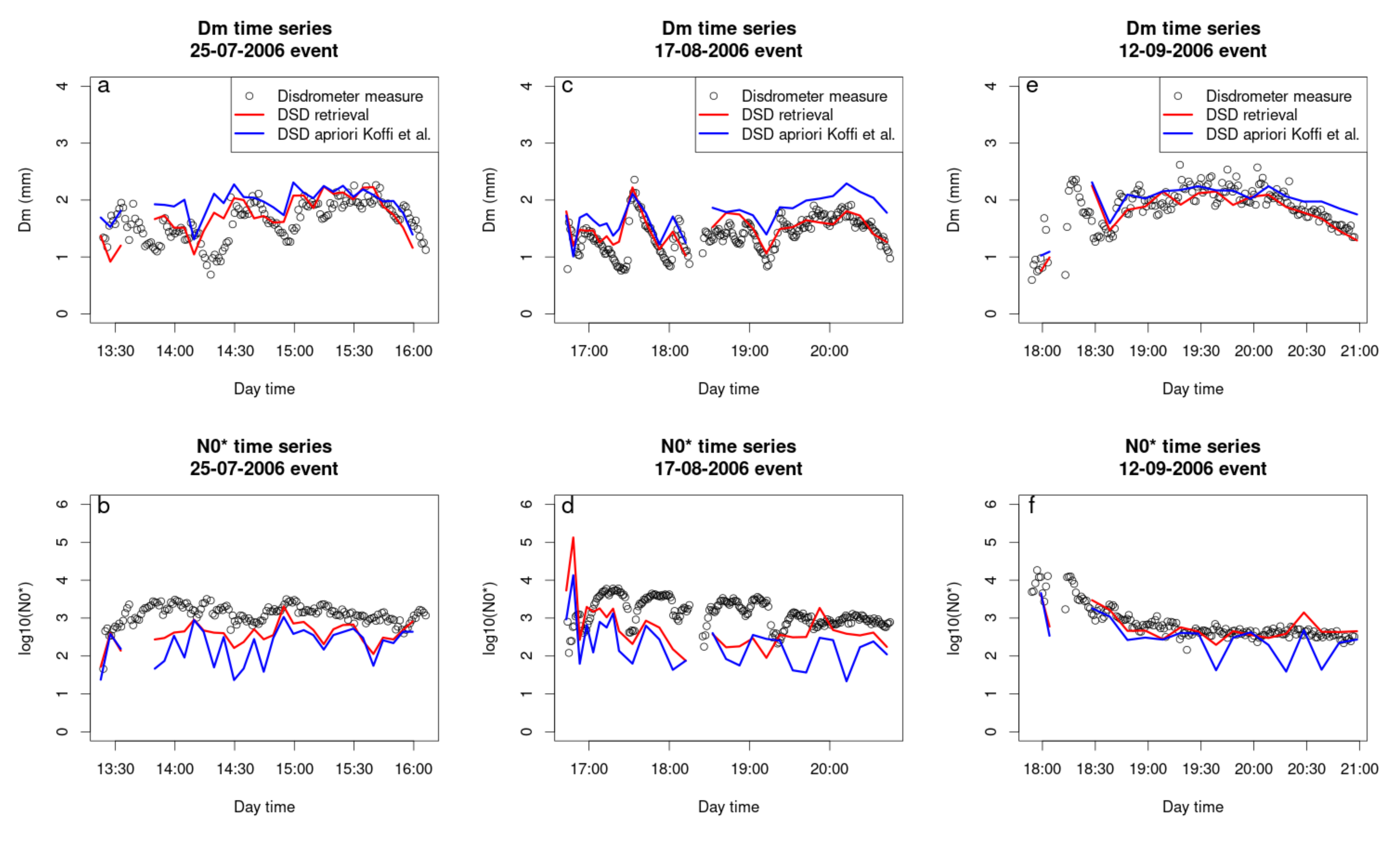
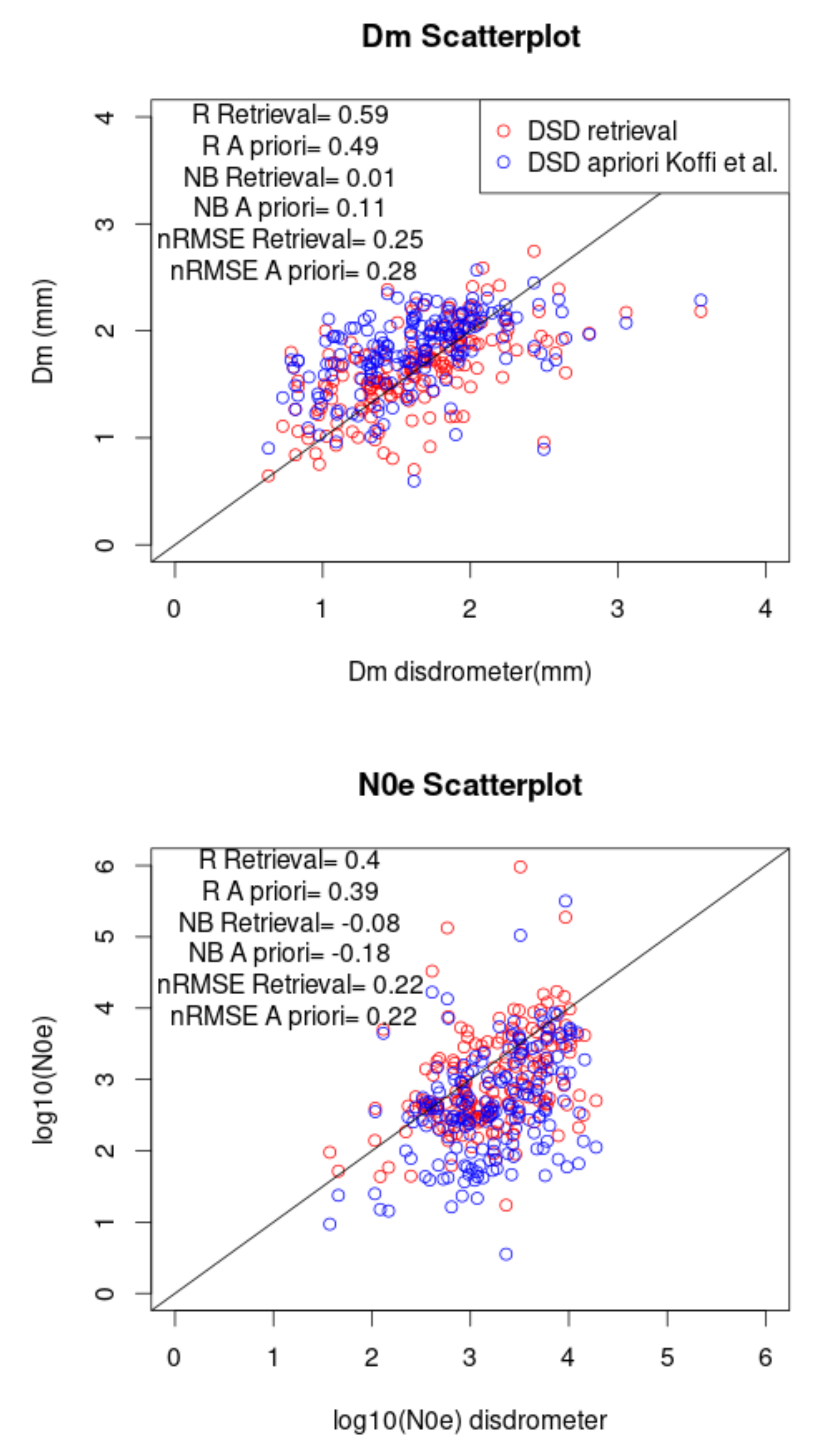
5.2. Comparison of Disdrometer and Radar Derived DSD
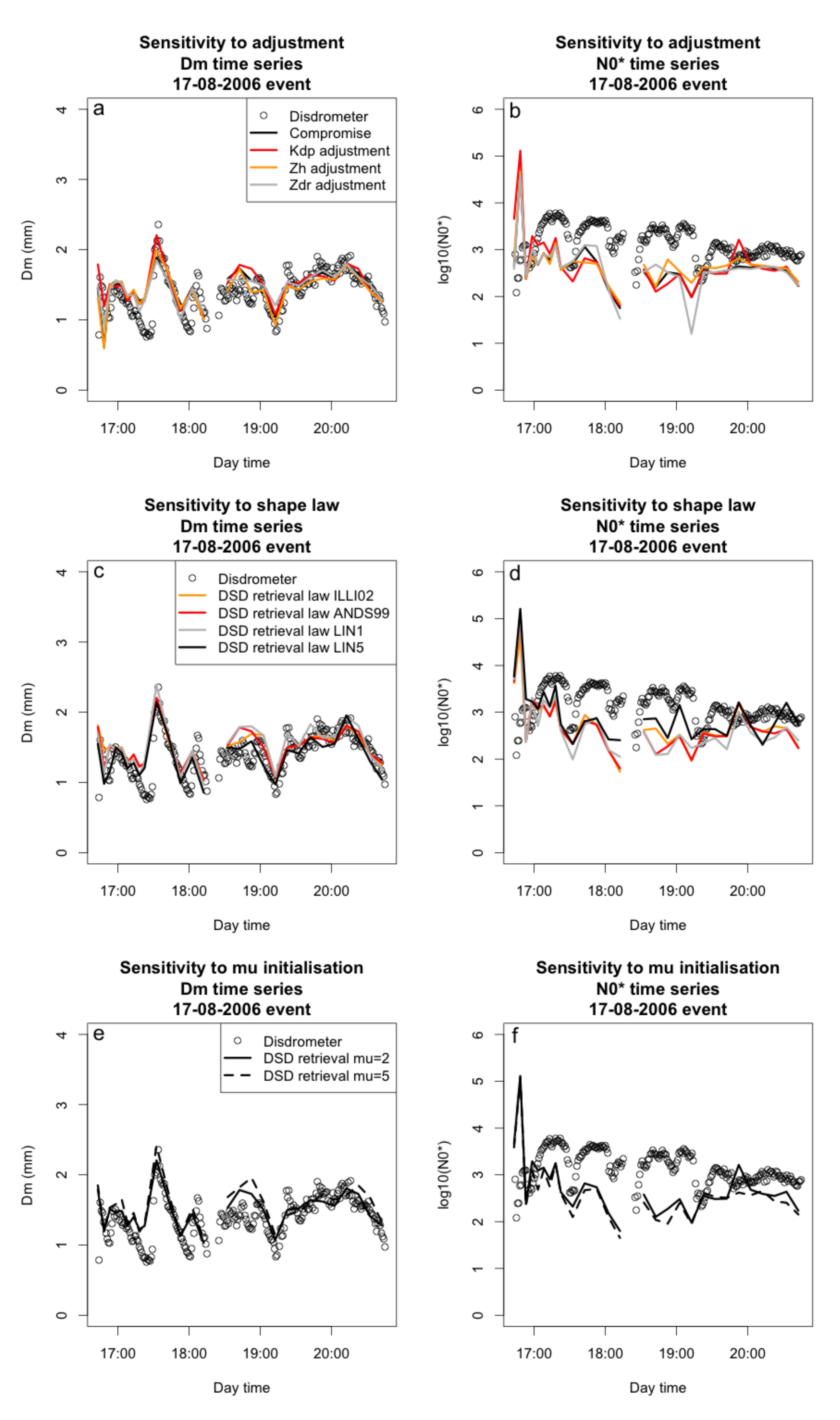
5.3. Sensitivity to Calibration and Model Parameters
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Jacobian Matrix of Partial Derivatives
Appendix B. Sensitivity of the Retrieval Method to Calibration and Model Parameters


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conv | Apr. | 53.9 | 17.5 | −0.5 | 33.4 | |
| Retr. | −15.2 | 26.9 | −10.3 | 29.4 | ||
| Apr. | 2.5 | −1.8 | 2.8 | −2.3 | ||
| Retr. | 2.9 | −1.8 | 2.2 | −2.3 | ||
| Apr. | - | - | - | - | ||
| Retr. | 112.8 | 52.4 | 108.3 | 86.8 | ||
| Apr. | 16.8 | −14.2 | −2.8 | 3.1 | ||
| Retr. | −5.7 | 4.8 | −3.1 | 3.6 | ||
| Strat | Apr. | 20.9 | −14.3 | −27.1 | 125.7 | |
| Retr. | −21.7 | 27.2 | −13.4 | 108.4 | ||
| Apr. | 0.3 | 0.0 | 6.2 | −5.8 | ||
| Retr. | 7.0 | −4.2 | 3.0 | −3.4 | ||
| Apr. | - | - | - | - | ||
| Retr. | 17.1 | −4.8 | −14.3 | 17.3 | ||
| Apr. | 19.4 | −16.4 | −6.2 | 7.4 | ||
| Retr. | 2.0 | 0.3 | −4.6 | 15.8 | ||
References
- Atlas, D.; Ulbrich, C.W.; Marks, F.D.; Amitai, E.; Williams, C.R. Systematic Variation of Drop Size and Radar-Rainfall Relations. J. Geophys. Res. Atmos. 1999, 104, 6155–6169. [Google Scholar] [CrossRef]
- Lee, G.W.; Zawadzki, I. Variability of Drop Size Distributions: Time-Scale Dependence of the Variability and Its Effects on Rain Estimation. J. Appl. Meteorol. 2005, 44, 241–255. [Google Scholar] [CrossRef]
- Lee, G.W.; Zawadzki, I.; Szyrmer, W.; Sempere-Torres, D.; Uijlenhoet, R. A General Approach to Double-Moment Normalization of Drop Size Distributions. J. Appl. Meteorol. 2004, 43, 264–281. [Google Scholar] [CrossRef]
- Steiner, M.; Smith, J.A.; Uijlenhoet, R. A Microphysical Interpretation of Radar Reflectivity–Rain Rate Relationships. J. Atmos. Sci. 2004, 61, 1114–1131. [Google Scholar] [CrossRef]
- Uijlenhoet, R.; Steiner, M.; Smith, J.A. Variability of Raindrop Size Distributions in a Squall Line and Implications for Radar Rainfall Estimation. J. Hydrometeorol. 2003, 4, 43–61. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, G.; Brandes, E.; Schuur, T.; Ryzhkov, A.; Ikeda, K. Analysis of Video Disdrometer and Polarimetric Radar Data to Characterize Rain Microphysics in Oklahoma. J. Appl. Meteorol. Climatol. 2008, 47, 2238–2255. [Google Scholar] [CrossRef] [Green Version]
- Vivekanandan, J.; Zhang, G.; Brandes, E. Polarimetric Radar Estimators Based on a Constrained Gamma Drop Size Distribution Model. J. Appl. Meteorol. 2004, 43, 217–230. [Google Scholar] [CrossRef]
- Koffi, A.K.; Gosset, M.; Zahiri, E.-P.; Ochou, A.D.; Kacou, M.; Cazenave, F.; Assamoi, P. Evaluation of X-Band Polarimetric Radar Estimation of Rainfall and Rain Drop Size Distribution Parameters in West Africa. Atmos. Res. 2014, 143, 438–461. [Google Scholar] [CrossRef]
- Bringi, V.N.; Huang, G.-J.; Chandrasekar, V.; Gorgucci, E. A Methodology for Estimating the Parameters of a Gamma Raindrop Size Distribution Model from Polarimetric Radar Data: Application to a Squall-Line Event from the TRMM/Brazil Campaign. J. Atmos. Ocean. Technol. 2002, 19, 633–645. [Google Scholar] [CrossRef]
- Janapati, J.; Seela, B.K.; Lin, P.-L.; Wang, P.K.; Kumar, U. An Assessment of Tropical Cyclones Rainfall Erosivity for Taiwan. Sci. Rep. 2019, 9, 15862. [Google Scholar] [CrossRef] [Green Version]
- Protat, A.; Klepp, C.; Louf, V.; Petersen, W.A.; Alexander, S.P.; Barros, A.; Leinonen, J.; Mace, G.G. The Latitudinal Variability of Oceanic Rainfall Properties and Its Implication for Satellite Retrievals: 2. The Relationships Between Radar Observables and Drop Size Distribution Parameters. JGR Atmos. 2019, 124, 13312–13324. [Google Scholar] [CrossRef]
- Protat, A.; Klepp, C.; Louf, V.; Petersen, W.A.; Alexander, S.P.; Barros, A.; Leinonen, J.; Mace, G.G. The Latitudinal Variability of Oceanic Rainfall Properties and Its Implication for Satellite Retrievals: 1. Drop Size Distribution Properties. JGR Atmos. 2019, 124, 13291–13311. [Google Scholar] [CrossRef]
- Torres, D.S.; Porrà, J.M.; Creutin, J.-D. A General Formulation for Raindrop Size Distribution. J. Appl. Meteorol. 1994, 33, 1494–1502. [Google Scholar] [CrossRef]
- Testud, J.; Oury, S.; Black, R.A.; Amayenc, P.; Dou, X. The Concept of “Normalized” Distribution to Describe Raindrop Spectra: A Tool for Cloud Physics and Cloud Remote Sensing. J. Appl. Meteorol. 2001, 40, 1118–1140. [Google Scholar] [CrossRef]
- Lee, C.K.; Lee, G.W.; Zawadzki, I.; Kim, K.-E. A Preliminary Analysis of Spatial Variability of Raindrop Size Distributions during Stratiform Rain Events. J. Appl. Meteorol. Climatol. 2009, 48, 270–283. [Google Scholar] [CrossRef]
- Gorgucci, E.; Scarchilli, G.; Chandrasekar, V.; Bringi, V.N. Rainfall Estimation from Polarimetric Radar Measurements: Composite Algorithms Immune to Variability in Raindrop Shape–Size Relation. J. Atmos. Ocean. Technol. 2001, 18, 1773–1786. [Google Scholar] [CrossRef]
- Gorgucci, E.; Chandrasekar, V.; Bringi, V.N.; Scarchilli, G. Estimation of Raindrop Size Distribution Parameters from Polarimetric Radar Measurements. J. Atmos. Sci. 2002, 59, 2373–2384. [Google Scholar] [CrossRef]
- Gorgucci, E.; Chandrasekar, V.; Baldini, L. Can a Unique Model Describe the Raindrop Shape–Size Relation? A Clue from Polarimetric Radar Measurements. J. Atmos. Ocean. Technol. 2009, 26, 1829–1842. [Google Scholar] [CrossRef]
- Zhang, G.; Vivekanandan, J.; Brandes, E. A Method For Estimating Rain Rate And Drop Size Distribution From Polarimetric Radar Measurements. IEEE Trans. Geosci. Remote Sens. 2021, 4, 830–841. [Google Scholar]
- Brandes, E.A.; Zhang, G.; Vivekanandan, J. Drop Size Distribution Retrieval with Polarimetric Radar: Model and Application. J. Appl. Meteorol. 2004, 43, 461–475. [Google Scholar] [CrossRef]
- Kim, D.-S.; Maki, M.; Lee, D.-I. Retrieval of Three-Dimensional Raindrop Size Distribution Using X-Band Polarimetric Radar Data. J. Atmos. Ocean. Technol. 2010, 27, 1265–1285. [Google Scholar] [CrossRef]
- Anagnostou, M.N.; Anagnostou, E.N.; Vulpiani, G.; Montopoli, M.; Marzano, F.S.; Vivekanandan, J. Evaluation of X-Band Polarimetric-Radar Estimates of Drop-Size Distributions From Coincident S-Band Polarimetric Estimates and Measured Raindrop Spectra. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3067–3075. [Google Scholar] [CrossRef]
- Raupach, T.H.; Berne, A. Retrieval of the Raindrop Size Distribution from Polarimetric Radar Data Using Double-Moment Normalisation. Atmos. Meas. Tech. 2017, 10, 2573–2594. [Google Scholar] [CrossRef] [Green Version]
- Islam, T.; Rico-Ramirez, M.A.; Han, D. Tree-Based Genetic Programming Approach to Infer Microphysical Parameters of the DSDs from the Polarization Diversity Measurements. Comput. Geosci. 2012, 48, 20–30. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, G.; Brandes, E.A.; Schuur, T.J. Polarimetric Radar Rain Estimation through Retrieval of Drop Size Distribution Using a Bayesian Approach. J. Appl. Meteorol. Climatol. 2010, 49, 973–990. [Google Scholar] [CrossRef]
- Wen, G.; Chen, H.; Zhang, G.; Sun, J. An Inverse Model for Raindrop Size Distribution Retrieval with Polarimetric Variables. Remote Sens. 2018, 10, 1179. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.-S.; Maki, M.; Lee, D.-I. Correction of X-Band Radar Reflectivity and Differential Reflectivity for Rain Attenuation Using Differential Phase. Atmos. Res. 2008, 90, 1–9. [Google Scholar] [CrossRef]
- Park, S.G.; Maki, M.; Iwanami, K.; Bringi, V.N.; Chandrasekar, V. Correction of Radar Reflectivity and Differential Reflectivity for Rain Attenuation at X Band. Part II: Evaluation and Application. J. Atmos. Ocean. Technol. 2005, 22, 1633–1655. [Google Scholar] [CrossRef]
- Shi, Z.; Chen, H.; Chandrasekar, V.; He, J. Deployment and Performance of an X-Band Dual-Polarization Radar during the Southern China Monsoon Rainfall Experiment. Atmosphere 2017, 9, 4. [Google Scholar] [CrossRef] [Green Version]
- Bringi, V.N.; Keenan, T.D.; Chandrasekar, V. Correcting C-Band Radar Reflectivity and Differential Reflectivity Data for Rain Attenuation: A Self-Consistent Method with Constraints. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1906–1915. [Google Scholar] [CrossRef]
- Testud, J.; Le Bouar, E.; Obligis, E.; Ali-Mehenni, M. The Rain Profiling Algorithm Applied to Polarimetric Weather Radar. J. Atmos. Ocean. Technol. 2000, 17, 332–356. [Google Scholar] [CrossRef]
- Matrosov, S.Y.; Clark, K.A.; Martner, B.E.; Tokay, A. X-Band Polarimetric Radar Measurements of Rainfall. J. Appl. Meteorol. 2002, 41, 941–952. [Google Scholar] [CrossRef]
- Kalogiros, J.; Anagnostou, M.N.; Anagnostou, E.N.; Montopoli, M.; Picciotti, E.; Marzano, F.S. Evaluation of a New Polarimetric Algorithm for Rain-Path Attenuation Correction of X-Band Radar Observations Against Disdrometer. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1369–1380. [Google Scholar] [CrossRef]
- Gou, Y.; Chen, H.; Zheng, J. An Improved Self-Consistent Approach to Attenuation Correction for C-Band Polarimetric Radar Measurements and Its Impact on Quantitative Precipitation Estimation. Atmos. Res. 2019, 226, 32–48. [Google Scholar] [CrossRef]
- Gosset, M.; Zahiri, E.-P.; Moumouni, S. Rain Drop Size Distribution Variability and Impact on X-Band Polarimetric Radar Retrieval: Results from the AMMA Campaign in Benin. Q. J. R. Meteorol. Soc. 2010, 136, 243–256. [Google Scholar] [CrossRef]
- Matrosov, S.Y.; Kingsmill, D.E.; Martner, B.E.; Ralph, F.M. The Utility of X-Band Polarimetric Radar for Quantitative Estimates of Rainfall Parameters. J. Hydrometeorol. 2005, 6, 248–262. [Google Scholar] [CrossRef] [Green Version]
- Chang, W.-Y.; Vivekanandan, J.; Chen Wang, T.-C. Estimation of X-Band Polarimetric Radar Attenuation and Measurement Uncertainty Using a Variational Method. J. Appl. Meteorol. Climatol. 2014, 53, 1099–1119. [Google Scholar] [CrossRef]
- Yoshikawa, E.; Chandrasekar, V.; Ushio, T. Raindrop Size Distribution (DSD) Retrieval for X-Band Dual-Polarization Radar. J. Atmos. Ocean. Technol. 2014, 31, 387–403. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2005; Volume 89, ISBN 0-89871-792-2. [Google Scholar]
- Menke, W. Geophysical Data Analysis: Discrete Inverse Theory, 4th ed.; Elsevier: Amsterdam, The Netherlands; Academic Press: Cambridge, MA, USA, 2018; ISBN 978-0-12-813555-6. [Google Scholar]
- Lebel, T.; Parker, D.J.; Flamant, C.; Bourlès, B.; Marticorena, B.; Mougin, E.; Peugeot, C.; Diedhiou, A.; Haywood, J.M.; Ngamini, J.B.; et al. The AMMA Field Campaigns: Multiscale and Multidisciplinary Observations in the West African Region. Q. J. R. Meteorol. Soc. 2010, 136, 8–33. [Google Scholar] [CrossRef]
- Depraetere, C.; Gosset, M.; Ploix, S.; Laurent, H. The Organization and Kinematics of Tropical Rainfall Systems Ground Tracked at Mesoscale with Gages: First Results from the Campaigns 1999–2006 on the Upper Ouémé Valley (Benin). J. Hydrol. 2009, 375, 143–160. [Google Scholar] [CrossRef]
- Moumouni, S.; Gosset, M.; Houngninou, E. Main Features of Rain Drop Size Distributions Observed in Benin, West Africa, with Optical Disdrometers. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Cazenave, F.; Gosset, M.; Kacou, M.; Alcoba, M.; Fontaine, E.; Duroure, C.; Dolan, B. Characterization of Hydrometeors in Sahelian Convective Systems with an X-Band Radar and Comparison with in Situ Measurements. Part I: Sensitivity of Polarimetric Radar Particle Identification Retrieval and Case Study Evaluation. J. Appl. Meteorol. Climatol. 2016, 55, 231–249. [Google Scholar] [CrossRef]
- Hubbert, J.; Bringi, V.N. An Iterative Filtering Technique for the Analysis of Copolar Differential Phase and Dual-Frequency Radar Measurements. J. Atmos. Ocean. Technol. 1995, 12, 643–648. [Google Scholar] [CrossRef]
- Delahaye, J.-Y.; Barthès, L.; Golé, P.; Lavergnat, J.; Vinson, J.P. A Dual-Beam Spectropluviometer Concept. J. Hydrol. 2006, 328, 110–120. [Google Scholar] [CrossRef]
- Moumouni, S. Analyse Des Distributions Granulométriques Des Pluies Au Bénin: Caractéristiques Globales, Variabilité et Application à La Mesure Radar. Ph.D. Thesis, Ecole Normale Supérieure Natitingou, Université de Parakou, Parakou, Bénin, 2009. [Google Scholar]
- Tokay, A.; Short, D.A. Evidence from Tropical Raindrop Spectra of the Origin of Rain from Stratiform versus Convective Clouds. J. Appl. Meteorol. 1996, 35, 355–371. [Google Scholar] [CrossRef]
- Alcoba, M.; Gosset, M.; Kacou, M.; Cazenave, F.; Fontaine, E. Characterization of Hydrometeors in Sahelian Convective Systems with an X-Band Radar and Comparison with in Situ Measurements. Part II: A Simple Brightband Method to Infer the Density of Icy Hydrometeors. J. Appl. Meteorol. Climatol. 2016, 55, 251–263. [Google Scholar] [CrossRef]
- Trömel, S.; Kumjian, M.R.; Ryzhkov, A.V.; Simmer, C.; Diederich, M. Backscatter Differential Phase—Estimation and Variability. J. Appl. Meteorol. Climatol. 2013, 52, 2529–2548. [Google Scholar] [CrossRef] [Green Version]
- Giangrande, S.E.; McGraw, R.; Lei, L. An Application of Linear Programming to Polarimetric Radar Differential Phase Processing. J. Atmos. Ocean. Technol. 2013, 30, 1716–1729. [Google Scholar] [CrossRef]
- Schneebeli, M.; Berne, A. An Extended Kalman Filter Framework for Polarimetric X-Band Weather Radar Data Processing. J. Atmos. Ocean. Technol. 2012, 29, 711–730. [Google Scholar] [CrossRef]
- Otto, T.; Russchenberg, H.W.J. Estimation of Specific Differential Phase and Differential Backscatter Phase From Polarimetric Weather Radar Measurements of Rain. IEEE Geosci. Remote Sens. Lett. 2011, 8, 988–992. [Google Scholar] [CrossRef]
- Reinoso-Rondinel, R.; Unal, C.; Russchenberg, H. Adaptive and High-Resolution Estimation of Specific Differential Phase for Polarimetric X-Band Weather Radars. J. Atmos. Ocean. Technol. 2018, 35, 555–573. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar: Principles and Applications; Cambridge University Press: Cambridge, UK, 2001; ISBN 1-139-42946-9. [Google Scholar]
- Beard, K.V.; Bringi, V.N.; Thurai, M. A New Understanding of Raindrop Shape. Atmos. Res. 2010, 97, 396–415. [Google Scholar] [CrossRef]
- Szakáll, M.; Mitra, S.K.; Diehl, K.; Borrmann, S. Shapes and Oscillations of Falling Raindrops—A Review. Atmos. Res. 2010, 97, 416–425. [Google Scholar] [CrossRef]
- Gorgucci, E.; Baldini, L.; Chandrasekar, V. What Is the Shape of a Raindrop? An Answer from Radar Measurements. J. Atmos. Sci. 2006, 63, 3033–3044. [Google Scholar] [CrossRef]
- Andsager, K.; Beard, K.V.; Laird, N.F. Laboratory Measurements of Axis Ratios for Large Raindrops. J. Atmos. Sci. 1999, 56, 2673–2683. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D.; Mackowski, D.W. T-Matrix Computations of Light Scattering by Nonspherical Particles: A Review. J. Quant. Spectrosc. Radiat. Transf. 1996, 55, 535–575. [Google Scholar] [CrossRef]
- Waterman, P.C. Matrix Formulation of Electromagnetic Scattering. Proc. IEEE 1965, 53, 805–812. [Google Scholar] [CrossRef]
- Waterman, P.C. Symmetry, Unitarity, and Geometry in Electromagnetic Scattering. Phys. Rev. D 1971, 3, 825–839. [Google Scholar] [CrossRef]
- Tarantola, A.; Valette, B. Generalized Nonlinear Inverse Problems Solved Using the Least Squares Criterion. Rev. Geophys. 1982, 20, 219. [Google Scholar] [CrossRef]
- Adirosi, E.; Baldini, L.; Tokay, A. Rainfall and DSD Parameters Comparison between Micro Rain Radar, Two-Dimensional Video and Parsivel2 Disdrometers, and S-Band Dual-Polarization Radar. J. Atmos. Ocean. Technol. 2020, 37, 621–640. [Google Scholar] [CrossRef]
- Tapiador, F.J.; Navarro, A.; Moreno, R.; Jiménez-Alcázar, A.; Marcos, C.; Tokay, A.; Durán, L.; Bodoque, J.M.; Martín, R.; Petersen, W.; et al. On the Optimal Measuring Area for Pointwise Rainfall Estimation: A Dedicated Experiment with 14 Laser Disdrometers. J. Hydrometeorol. 2017, 18, 753–760. [Google Scholar] [CrossRef] [Green Version]


| Event Beginning Date and Time | Number of PPIs |
|---|---|
| 23 June 2006 04:51 | 24 |
| 25 July 2006 13:22 | 30 |
| 28 July 2006 05:21 | 27 |
| 2 August 2006 01:22 | 32 |
| 5 August 2006 14:57 | 6 |
| 7 August 2006 14:39 | 7 |
| 10 August 2006 16:49 | 12 |
| 14 August 2006 16:44 | 3 |
| 17 August 2006 16:43 | 28 |
| 30 August 2006 15:18 | 3 |
| 31 August 2006 13:09 | 12 |
| 3 September 2006 10:30 | 16 |
| 8 September 2006 16:22 | 10 |
| 9 September 2006 12:33 | 16 |
| 12 September 2006 17:59 | 18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alcoba, M.; Andrieu, H.; Gosset, M. An Inverse Method for Drop Size Distribution Retrieval from Polarimetric Radar at Attenuating Frequency. Remote Sens. 2022, 14, 1116. https://doi.org/10.3390/rs14051116
Alcoba M, Andrieu H, Gosset M. An Inverse Method for Drop Size Distribution Retrieval from Polarimetric Radar at Attenuating Frequency. Remote Sensing. 2022; 14(5):1116. https://doi.org/10.3390/rs14051116
Chicago/Turabian StyleAlcoba, Matias, Hervé Andrieu, and Marielle Gosset. 2022. "An Inverse Method for Drop Size Distribution Retrieval from Polarimetric Radar at Attenuating Frequency" Remote Sensing 14, no. 5: 1116. https://doi.org/10.3390/rs14051116
APA StyleAlcoba, M., Andrieu, H., & Gosset, M. (2022). An Inverse Method for Drop Size Distribution Retrieval from Polarimetric Radar at Attenuating Frequency. Remote Sensing, 14(5), 1116. https://doi.org/10.3390/rs14051116