
Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans

 , and
, and
Abstract
:1. Introduction
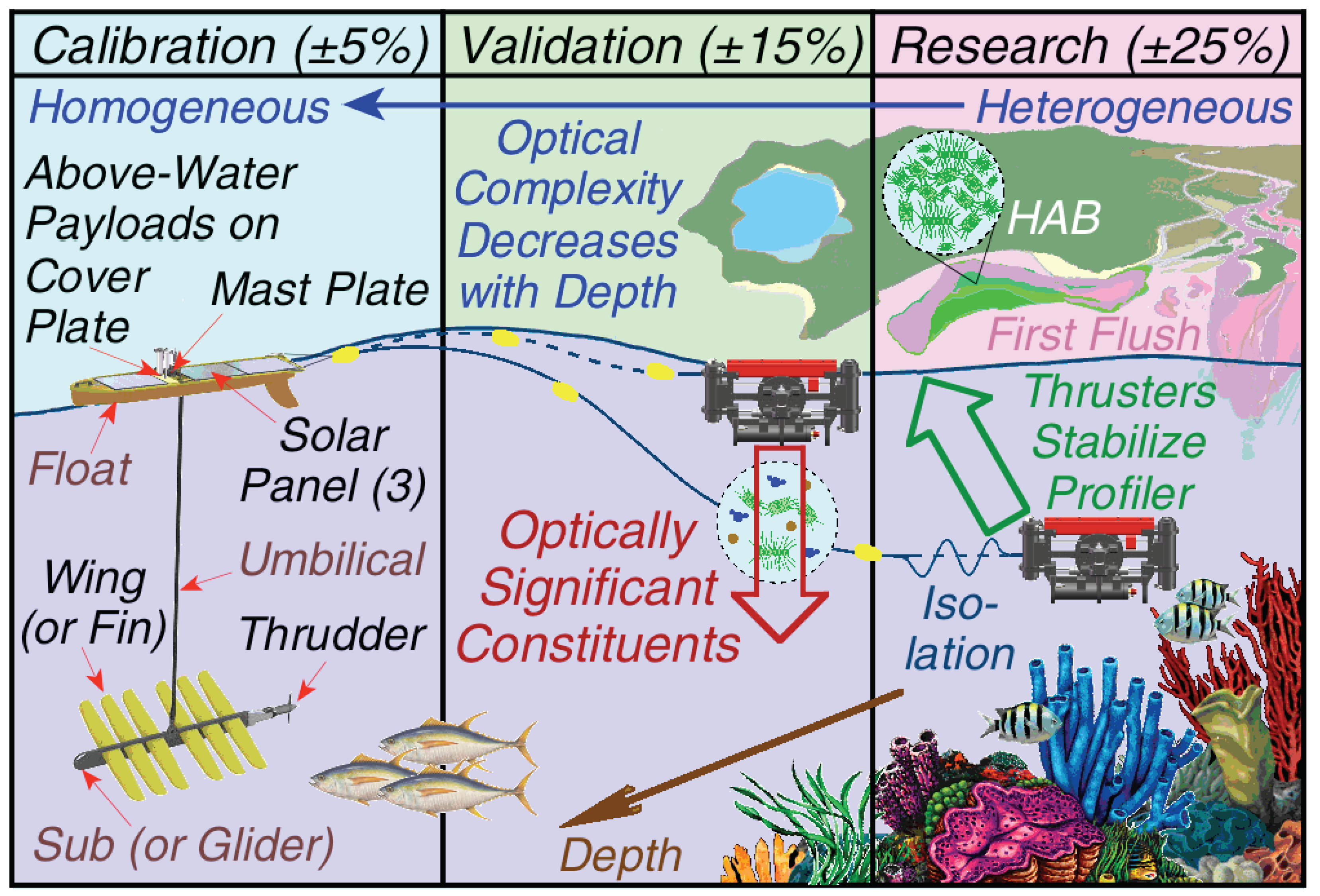
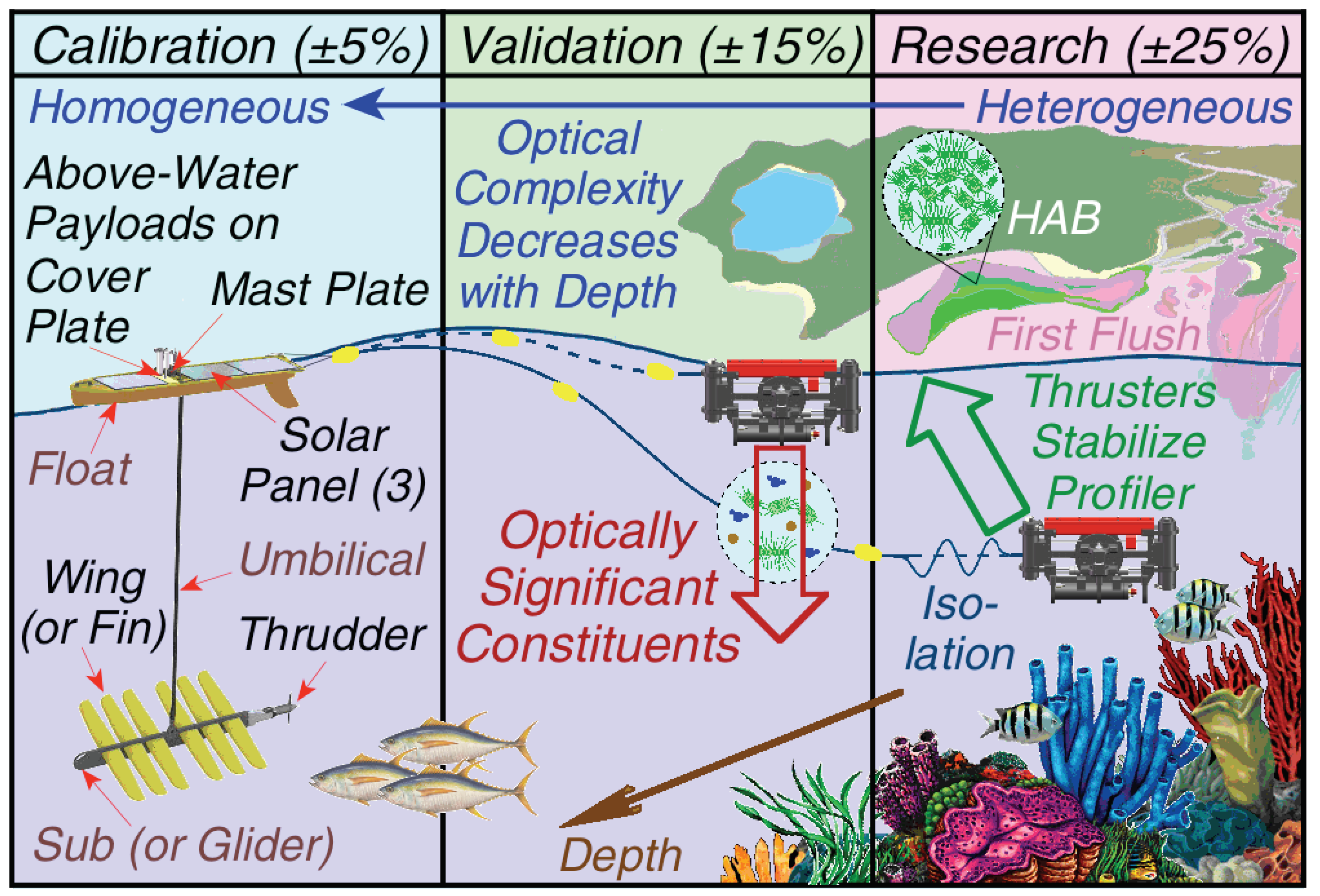
- C1
- Data are obtained within exceptionally clear waters with horizontally homogeneous optical properties (over several kilometers and typically in the deep ocean);
- C2
- Properly characterized hyperspectral instruments, calibrated with radiometric traceability to the National Institute of Standards and Technology (NIST), are used so spectral response functions for the satellite instrument can be applied; and
- C3
- Sampling is under clear skies, stable illumination, and marine aerosols (verified with shadow band or sun photometer data) with extraordinary calibration maintenance.
2. Materials and Methods
2.1. COTS USV
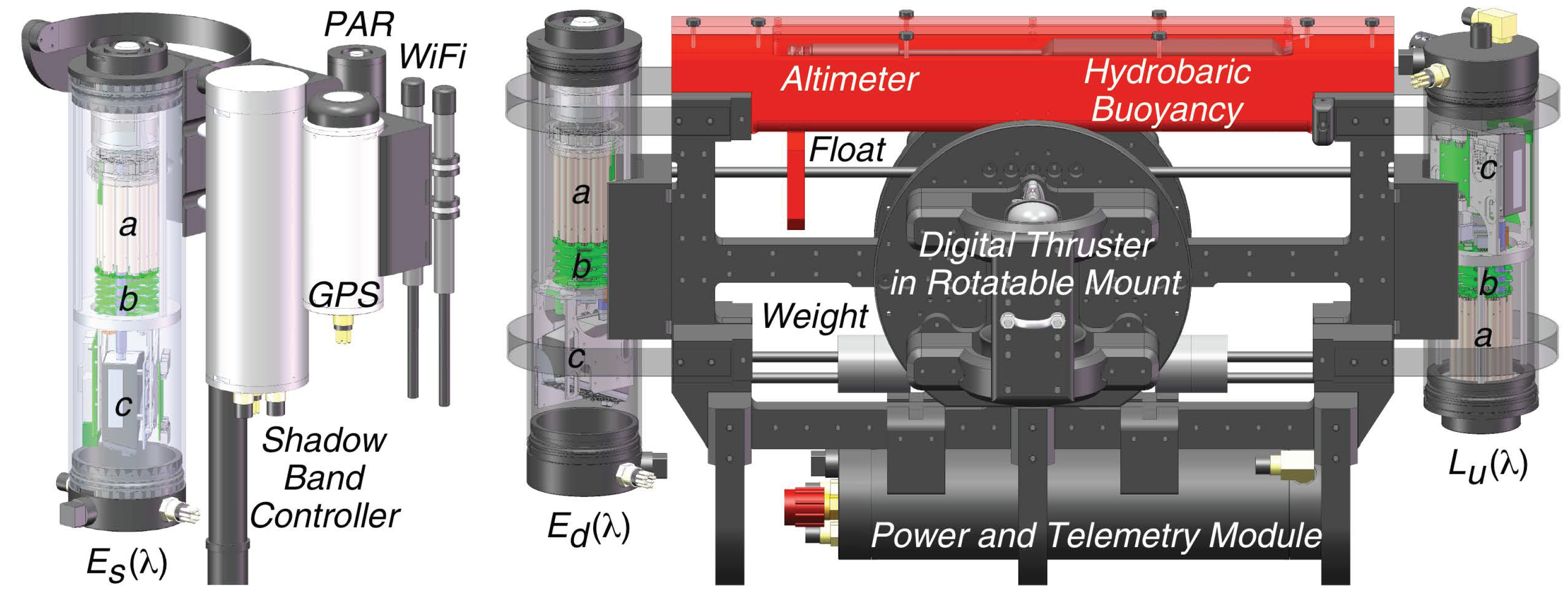
2.2. Optical Observations
2.3. Modifications to the Standard SV3 Configuration
- The original cover plate was replaced with a strengthened version of the same dimension to allow the mounting of the above-water instrument suite described in Section 2.2;
- The cellular and AIS antennas plus the weather station mast were shortened to achieve a final height below the and PAR diffusers. Although all shortened components functioned as anticipated, the original AIS unit was subsequently replaced with a model made by Antcom (Torrance, CA, USA), the supplier of the cellular antenna, to ensure height compliance with no alterations to the original device (because AIS functionality is a critical safety requirement);
- Hard anodized aluminum brackets were added to the stern port and starboard stabilizing handle mounts to support the harness cabling attached to the sea cable used for towing the TOW-FISH with no loss in functionality of the handles;
- Stainless steel and insulated P-clips plus reinforcing metal plates were used together with longer screws securing the two aft solar panels to allow the sea cable to be held down along the edge of the solar panels without shading the panels;
- The center pick point on the mast plate was ultimately replaced with an extended pick-point assembly to facilitate SV3 recovery. The original center pick point was positioned rather low and close to the float deck, which was considered somewhat problematic due to the near proximity of the higher above-water instrument suite mounted on the cover plate.
2.4. Optical Data Products
- N1
- is derived () as a function (denoted g) of extrapolated to null depth (), to also define the extrapolation interval, and applicable corrections, e.g., dark currents, aperture offsets, temporal (solar transit) changes, self-shading, etc;
- N2
- The correction for the hypothetical water-leaving radiance that would be measured in the absence of any atmospheric loss with a zenith Sun at the mean Earth–Sun distance is accomplished by adjusting with the time-dependent mean extraterrestrial solar irradiance, , which is usually formulated to depend on the sequential day of the year (SDY), , and is derived from look-up tables [24];
- N3
- The f term is defined () as a function relating the irradiance reflectance () to the inherent optical properties (IOPs), the bidirectional Q-factor is defined () by and , i.e., , wherein and are defined for a zero solar zenith angle () with nadir viewing at null depth () for the latter, and look-up tables for both are based on the viewing and solar geometry plus the .
2.5. Water Sample Analyses
2.6. Verification and Validation Approach
- A validation comparison of hyperspectral C-PHIRE and multispectral microradiometers;
- A validation comparison of C-PHIRE and C-OPS multispectral microradiometers;
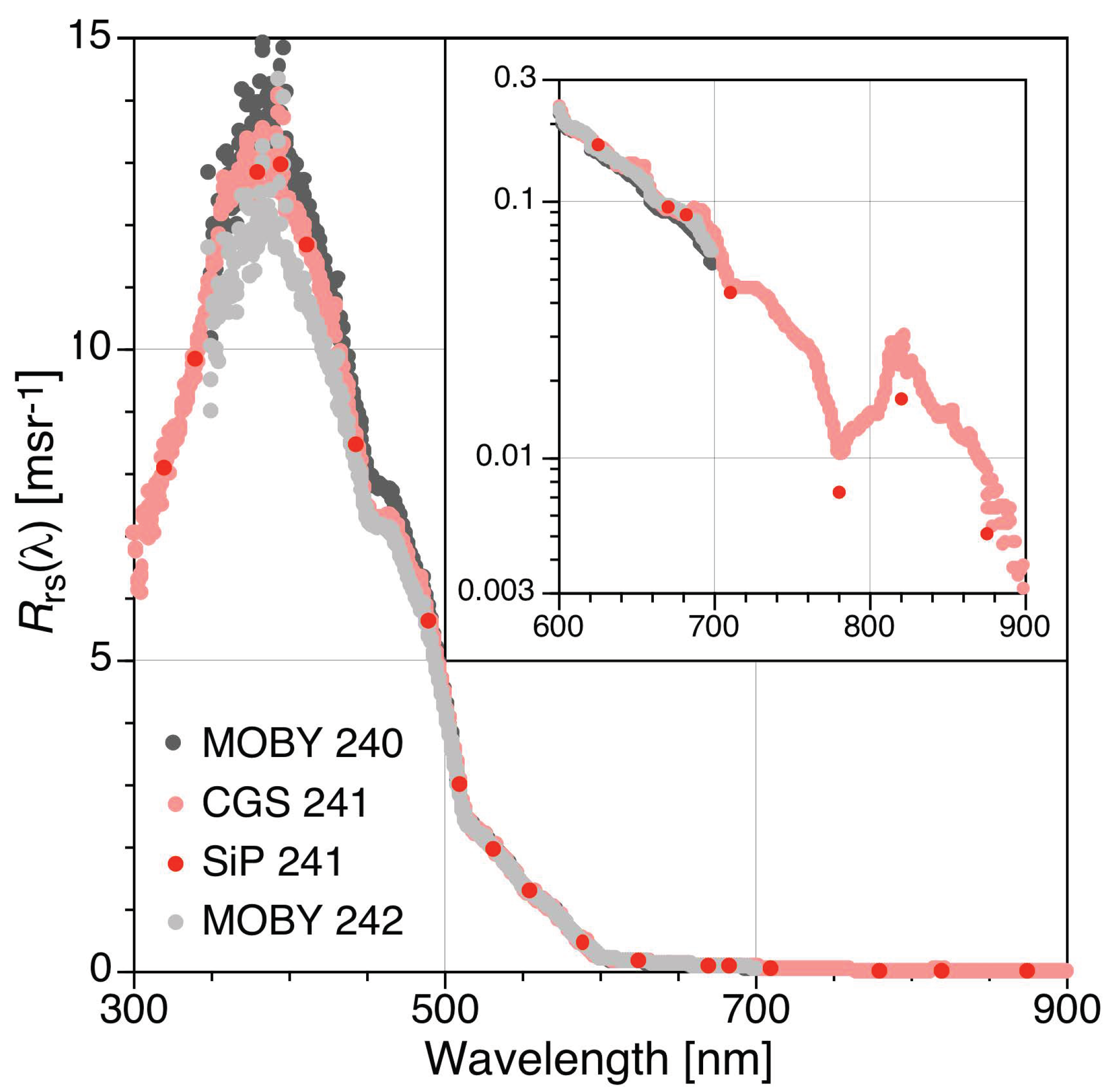
- A verification comparison of hyperspectral C-PHIRE and MOBY data products; and
- A verification comparison of the hyperspectral MOBY and multispectral microradiometers.
- PHY
- The C-PHIRE hyperspectral data;
- PAH
- The C-PHIRE hyperspectral data converted to averaged wavebands;
- PBH
- The C-PHIRE hyperspectral data converted to bandpass wavebands;
- PMS
- The C-PHIRE multispectral data;
- OMS
- The C-OPS multispectral detector data;
- MHY
- The MOBY hyperspectral data; and
- MBH
- The MOBY hyperspectral data converted to bandpass wavebands.
3. Results
3.1. Validation Using Calibration Data Products
3.2. Validation Using Lower-Level Data Products
3.3. Validation and Verification Using Higher-Level Data Products
- Data products based on the higher flux measured by an upward-pointed irradiance instrument () have smaller differences than those based principally on the lower flux of a downward-pointed radiance instrument ();
- The differences are only a little larger than the best possible differences determined on the optical bench (Table 1);
- Comparisons between multispectral data sources (e.g., PMS and OMS) have smaller differences than those involving hyperspectral data (e.g., PBH and MBH);
- The smallest differences are found for the VIS domain; the neighboring UV and NIR domains have larger differences, with the NIR having the largest;
- There is little evidence of a significant and systematic bias as a function of spectral domain or sensor type except for NIR comparisons involving a hyperspectral sensor.
3.4. Algorithm Output Validation
4. Discussion
4.1. Autonomous Observations of Aquatic Ecosystems Using an SV3 Platform
4.2. Validation and Verification Comparisons
4.3. Advantages of the Hybridspectral Perspective
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hooker, S.B.; Esaias, W.E. An overview of the SeaWiFS project. Eos Trans. Am. Geophys. Union 1993, 74, 241–246. [Google Scholar] [CrossRef]
- Asrar, G.; Greenstone, R. 1995 MTPE/EOS Reference Handbook; NASA: Greenbelt, MD, USA, 1995; p. 277.
- Hooker, S.B.; McClain, C.R.; Mannino, A. NASA Strategic Planning Document: A Comprehensive Plan for the Long-Term Calibration and Validation of Oceanic Biogeochemical Satellite Data; NASA: Greenbelt, MD, USA, 2007; p. 31.
- Mueller, J.L. Overview of measurement and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 2; Fargion, G.S., Mueller, J.L., Eds.; NASA: Greenbelt, MD, USA, 2000; pp. 87–97. [Google Scholar]
- Mueller, J.L. Overview of measurement and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 3, Volume 1; Mueller, J.L., Fargion, G.S., Eds.; NASA: Greenbelt, MD, USA, 2002; pp. 123–137. [Google Scholar]
- Mueller, J.L. Overview of measurement and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4, Volume III; NASA: Greenbelt, MD, USA, 2002; pp. 1–20. [Google Scholar]
- Mueller, J.L.; Austin, R.W. Ocean Optics Protocols for SeaWiFS Validation; Hooker, S.B., Firestone, E.R., Eds.; NASA: Greenbelt, MD, USA, 1992; p. 43.
- Mueller, J.L.; Austin, R.W. Ocean Optics Protocols for SeaWiFS Validation, Revision 1; Hooker, S.B., Firestone, E.R., Acker, J.G., Eds.; NASA: Greenbelt, MD, USA, 1995; p. 66.
- Hooker, S.B. Mobilization Protocols for Hybrid Sensors for Environmental AOP Sampling (HySEAS) Observations; NASA: Greenbelt, MD, USA, 2014; p. 105.
- Hooker, S.B.; Houskeeper, H.F.; Kudela, R.M.; Matsuoka, A.; Suzuki, K.; Isada, T. Spectral modes of radiometric measurements in optically complex waters. Cont. Shelf Res. 2021, 219, 104357. [Google Scholar] [CrossRef]
- Likens, G.E. Encyclopedia of Inland Waters; Elsevier: Amsterdam, The Netherlands, 2009; p. 2250. [Google Scholar]
- Clark, D.; Gordon, H.R.; Voss, K.J.; Ge, Y.; Broenkow, W.; Trees, C. Validation of atmospheric correction over the oceans. J. Geophys. Res. Atmosp. 1997, 102, 17209–17217. [Google Scholar] [CrossRef]
- Antoine, D.; Chami, M.; Claustre, H.; Morel, A.; Bécu, G.; Gentili, B.; Louis, F.; Ras, J.; Roussier, E.; Scott, A.J.; et al. BOUSSOLE: A Joint ESA, CNES, CNRS, and NASA Ocean Color Calibration and Validation Activity; NASA: Greenbelt, MD, USA, 2006; p. 59.
- Jemai, A.; Wollschläger, J.; Voß, D.; Zielinski, O. Radiometry on Argo floats: From the multispectral state-of-the-art on the step to hyperspectral technology. Front. Mar. Sci. 2021, 945, 1–10. [Google Scholar] [CrossRef]
- Hooker, S.B.; Lind, R.N.; Morrow, J.H.; Brown, J.W.; Suzuki, K.; Houskeeper, H.F.; Hirawake, T.; Maúre, E.R. Advances in Above- and In-Water Radiometry, Vol. 1: Enhanced Legacy and State-of-the-Art Instrument Suites; NASA: Greenbelt, MD, USA, 2018; p. 60.
- Hooker, S.B.; Lind, R.N.; Morrow, J.H.; Brown, J.W.; Kudela, R.M.; Houskeeper, H.F.; Suzuki, K. Advances in Above- and In-Water Radiometry, Volume 2: Autonomous Atmospheric and Oceanic Observing Systems; NASA: Greenbelt, MD, USA, 2018; p. 69.
- Hooker, S.B.; Lind, R.N.; Morrow, J.H.; Brown, J.W.; Kudela, R.M.; Houskeeper, H.F.; Suzuki, K. Advances in Above- and In-Water Radiometry, Volume 3: Hybridspectral Next-Generation Optical Instruments; NASA: Greenbelt, MD, USA, 2018; p. 39.
- Manley, J.E.; Hine, G. Unmanned Surface Vessels (USVs) as tow platforms: Wave Glider experience and results. In Ocean 2016 MTS/IEEE Monterey; IEEE: New York City, NY, USA, 2016; pp. 1–5. [Google Scholar]
- Hooker, S.B.; Morrow, J.H.; Matsuoka, A. Apparent optical properties of the Canadian Beaufort Sea, part II: The 1% and 1cm perspective in deriving and validating AOP data products. Biogeosciences 2013, 10, 4511–4527. [Google Scholar] [CrossRef] [Green Version]
- Morrow, J.H.; Hooker, S.B.; Booth, C.R.; Bernhard, G.; Lind, R.N.; Brown, J.W. Advances in Measuring the Apparent Optical Properties (AOPs) of Optically Complex Waters; NASA: Greenbelt, MD, USA, 2010; p. 80.
- Zaneveld, J.R.V.; Boss, E.; Barnard, A. Influence of surface waves on measured and modeled irradiance profiles. Appl. Opt. 2001, 40, 1442–1449. [Google Scholar] [CrossRef] [PubMed]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Morel, A.; Prieur, L. Analysis of variations in ocean color. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Simon, P.C.; Labs, D.; Mandel, H.; Gillotay, D.; Foujols, T. The solar spectral irradiance from 200 to 2400 nm as measured by the SOLSPEC spectrometer from the Atlas 1-2-3 and EURECA missions. Solar Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Hooker, S.B.; McClain, C.R.; Firestone, J.K.; Westphal, T.L.; Yeh, E.-N.; Ge, Y. The SeaWiFS Bio-Optical Archive and Storage System (SeaBASS), Part 1; Hooker, S.B., Firestone, E.R., Eds.; NASA: Greenbelt, MD, USA, 1994; p. 40.
- Werdell, P.J.; Bailey, S.W. The SeaWiFS Bio-optical Archive and Storage System (SeaBASS): Current Architecture and Implementation; NASA: Greenbelt, MD, USA, 2002; p. 45.
- Hooker, S.B.; Matsuoka, A.; Kudela, R.M.; Yamashita, Y.; Suzuki, K.; Houskeeper, H.F. A global end-member approach to derive aCDOM(440) from near-surface optical measurements. Biogeosciences 2020, 17, 475–497. [Google Scholar] [CrossRef] [Green Version]
- Van Heukelem, L.; Thomas, C. Computer-assisted high-performance liquid chromatography method development with applications to the isolation and analysis of phytoplankton pigments. J. Chromatogr. A. 2001, 910, 31–49. [Google Scholar] [CrossRef]
- Twardowski, M.S.; Boss, E.; Sullivan, J.M.; Donaghay, P.L. Modeling the spectral shape of absorption by chromophoric dissolved organic matter. Mar. Chem. 2004, 89, 69–88. [Google Scholar] [CrossRef]
- Hooker, S.B.; Houskeeper, H.F.; Lind, R.N.; Suzuki, K. One-and two-band sensors and algorithms to derive aCDOM(440) from global above- and in-water optical observations. Sensors 2021, 21, 5384. [Google Scholar] [CrossRef] [PubMed]
- VIM. International Vocabulary of Metrology—Basic and General Concepts and Associated Terms; JCGM 200, Joint Committee for Guides in Metrology; Bureau International des Poids et Mesures: Sèvres, France, 2012; p. 108. [Google Scholar]
- Guild, L.S.; Kudela, R.M.; Hooker, S.B.; Palacios, S.L.; Houskeeper, H.F. Airborne radiometry for calibration, validation, and research in oceanic, coastal, and inland waters. Front. Environ. Sci. 2020, 8, 585529. [Google Scholar] [CrossRef]
- Houskeeper, H.F.; Hooker, S.B.; Kudela, R.M. Spectral range within global aCDOM(440) algorithms for oceanic, coastal, and inland waters with application to airborne measurements. Remote Sens. Environ. 2021, 254, 112155. [Google Scholar] [CrossRef]
- Kudela, R.M.; Hooker, S.B.; Houskeeper, H.F.; McPherson, M.L. Estimation of signal-to-noise ratios for high spatial resolution satellites with implications for coastal ocean remote sensing. Remote Sens. 2019, 11, 20. [Google Scholar]
- Hooker, S.B.; Aiken, J. Calibration evaluation and radiometric testing of field radiometers with the SeaWiFS Quality Monitor (SQM). J. Atmos. Oceanic Technol. 1998, 15, 995–1007. [Google Scholar] [CrossRef]
- Gerbi, G.P.; Boss, E.; Werdell, P.J.; Proctor, C.W.; Haëntjens, N.; Lewis, M.R.; Brown, K.; Sorrentino, D.; Zaneveld, J.R.V.; Barnard, A.H.; et al. Validation of ocean color remote sensing reflectance using autonomous floats. J. Atmos. Oceanic Technol. 2016, 33, 2331–2352. [Google Scholar] [CrossRef]
- Barnard, A.; Van Dommelen, R.; Boss, E.; Plache, B.; Simontov, V.; Orrico, C.; Walter, D.; Lewis, M.; Carlson, D. A new paradigm for ocean color satellite calibration and validation: Accurate measurements of hyperspectral water leaving radiance from autonomous profiling floats (HYPERNAV). Earth Space Sci. Open Arch. 2018. [Google Scholar] [CrossRef]
- Lawson, A.; Bowers, J.; Ladner, S.; Crout, R.; Wood, C.; Arnone, R.; Martinolich, P.; Lewis, D. Analyzing satellite ocean color match-up protocols using the satellite validation Navy tool (SAVANT) at MOBY and two AERONET-OC sites. Remote Sens. 2021, 13, 2673. [Google Scholar] [CrossRef]
- Houskeeper, H.F. Advances in Bio-Optics for Observing Aquatic Ecosystems. Ph.D. Dissertation, University of California Santa Cruz, Santa Cruz, CA, USA, 2020. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| UV | −1.1 (1.1) | −2.3 (2.3) | −0.4 (1.3) | −1.0 (1.0) | −2.1 (2.1) | −0.4 (1.0) |
| Blue | 0.1 (0.2) | −2.0 (2.0) | −0.2 (0.2) | 0.0 (0.1) | −1.9 (1.9) | −0.2 (0.2) |
| Green | 0.4 (0.5) | −1.6 (1.6) | 0.4 (0.4) | 0.3 (0.3) | −1.6 (1.6) | 0.4 (0.4) |
| Red | 1.4 (1.4) | −1.0 (1.0) | 0.9 (0.9) | 1.2 (1.2) | −0.8 (0.8) | 0.7 (0.7) |
| NIR | 1.2 (1.2) | −0.8 (0.8) | 0.6 (0.6) | 1.1 (1.2) | −0.7 (0.7) | 0.6 (0.6) |
| 0.4 (0.9) | −1.5 (1.5) | ;0.2 (0.7) | 0.3 (0.7) | −1.4 (1.4) | 0.2 (0.5) |
| UV | 0.5 (1.2) | 1.4 (1.4) | 2.3 (2.3) | 1.0 (1.4) | −1.5 (2.3) | 4.3 (4.3) |
| Blue | −0.9 (1.0) | 0.1 (1.2) | 1.5 (1.5) | 0.8 (1.2) | −1.2 (2.1) | 1.2 (2.5) |
| Green | −0.5 (0.9) | −1.2 (1.3) | 1.4 (1.4) | −0.5 (1.1) | −1.5 (1.9) | −1.2 (1.5) |
| Red | 1.1 (1.3) | −1.6 (1.6) | 0.7 (2.0) | 1.2 (1.7) | 0.3 (0.6) | 4.6 (4.9) |
| NIR | 1.9 (1.9) | 1.8 (2.2) | −4.9 (6.5) § | 1.9 (2.4) | −4.5 (4.5) | 25.9 (25.9) † |
| 0.4 (1.3) | 0.1 (1.5) | 0.2 (2.7) § | 0.9 (1.6) | −1.7 (2.3) | 7.0 (7.8) † |
| UV | 1.7 (1.8) | 0.4 (1.9) | 2.0 (6.3) † | 1.5 (2.0) | 3.1 (3.1) | −0.2 (6.7) † |
| Blue | −1.5 (1.5) | 1.5 (1.5) | 0.2 (4.2) | 1.2 (1.4) | 0.2 (2.3) | 0.2 (4.0) |
| Green | −0.5 (1.1) | 2.0 (2.0) | 0.6 (0.8) | −0.4 (1.2) | −1.8 (1.3) | 0.2 (0.7) |
| Red | −0.5 (1.4) | −1.5 (3.6) | −1.1 (3.2) | 1.2 (2.5) | 4.5 (6.1) | 4.2 (4.9) |
| NIR | 1.8 (2.0) | −4.4 (4.4) | 11.2 (11.2) ‡ | 2.6 (2.8) | 23.7 (23.7) § | −12.2 (12.2) ‡ |
| 0.2 (1.6) | −0.4 (2.7) | 2.6 (5.1) | 1.2 (2.0) | 5.9 (7.3) § | −1.6 (5.7) |
| Input | |||||
|---|---|---|---|---|---|
| Data | |||||
| PMS OMS | 1.4 (2.3) | −0.6 (2.0) | −1.8 (3.3) | 0.9 (3.4) | −0.8 (3.2) |
| PBH PMS | 2.0 (2.9) | 2.1 (2.6) | −2.3 (3.7) | −2.8 (4.3) | 1.7 (3.9) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hooker, S.B.; Houskeeper, H.F.; Lind, R.N.; Kudela, R.M.; Suzuki, K. Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans. Remote Sens. 2022, 14, 1084. https://doi.org/10.3390/rs14051084
Hooker SB, Houskeeper HF, Lind RN, Kudela RM, Suzuki K. Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans. Remote Sensing. 2022; 14(5):1084. https://doi.org/10.3390/rs14051084
Chicago/Turabian StyleHooker, Stanford B., Henry F. Houskeeper, Randall N. Lind, Raphael M. Kudela, and Koji Suzuki. 2022. "Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans" Remote Sensing 14, no. 5: 1084. https://doi.org/10.3390/rs14051084
APA StyleHooker, S. B., Houskeeper, H. F., Lind, R. N., Kudela, R. M., & Suzuki, K. (2022). Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans. Remote Sensing, 14(5), 1084. https://doi.org/10.3390/rs14051084