
LiDAR Voxel-Size Optimization for Canopy Gap Estimation
 ,
,  ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
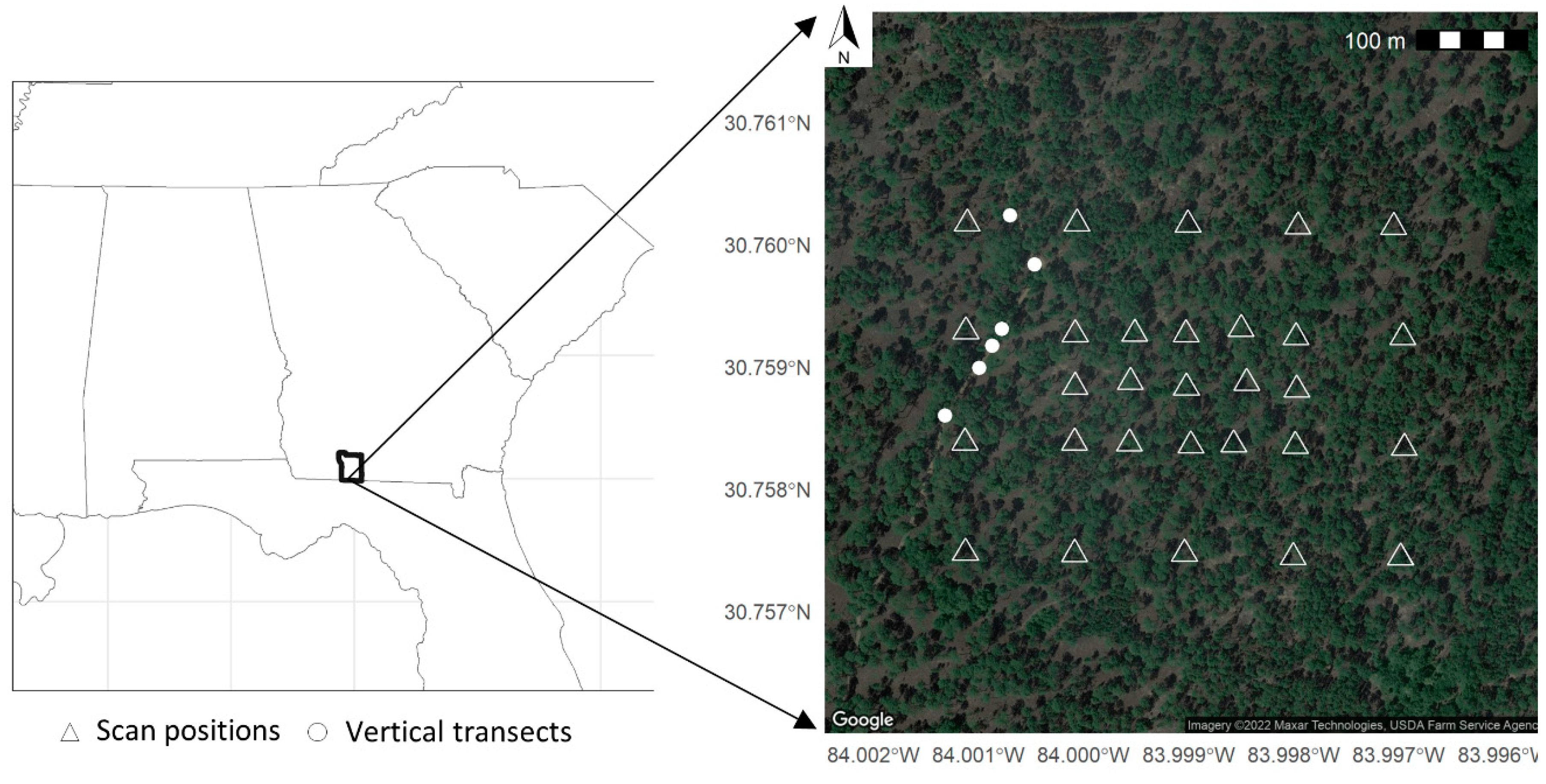
2.1. Site Description
2.2. Data Collection
2.2.1. Field Data
2.2.2. Airborne Laser Scanning
2.2.3. Terrestrial Laser Scanning
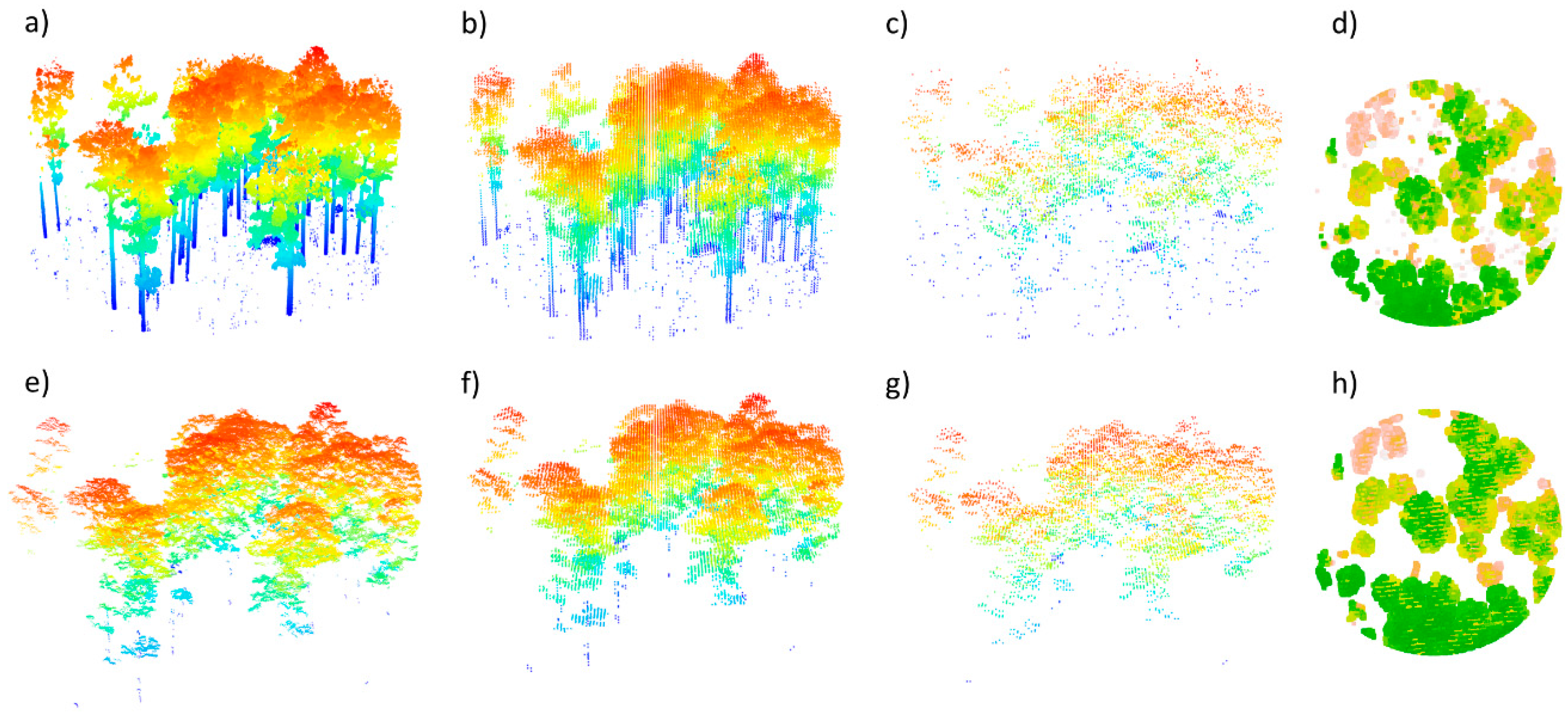
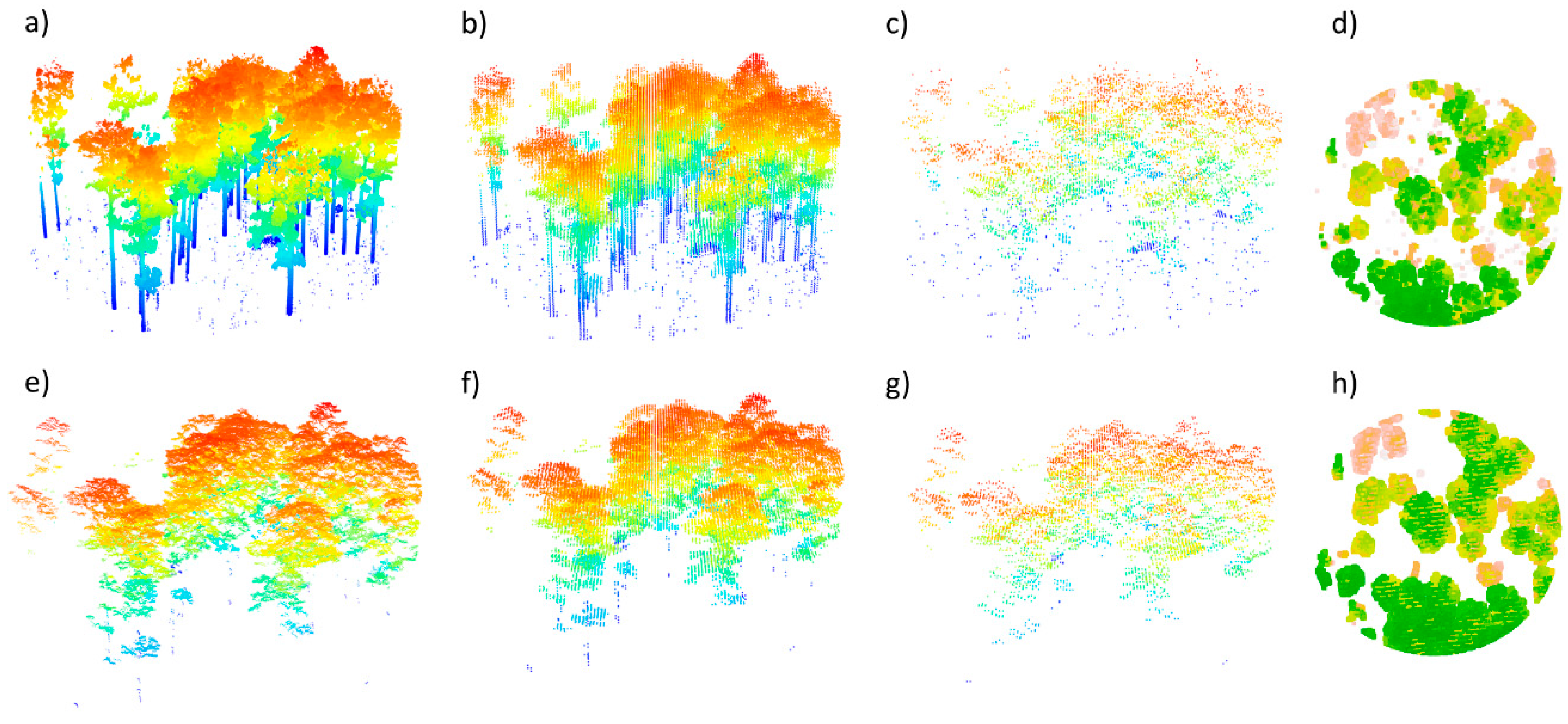
2.3. Point-Cloud Voxelization
2.4. Estimation of Canopy Gaps
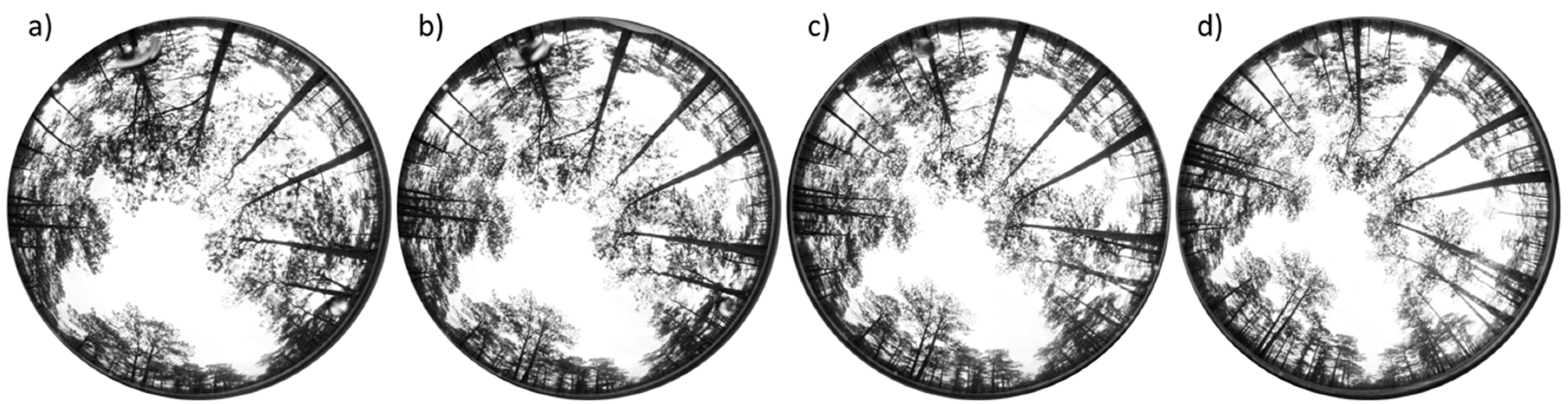
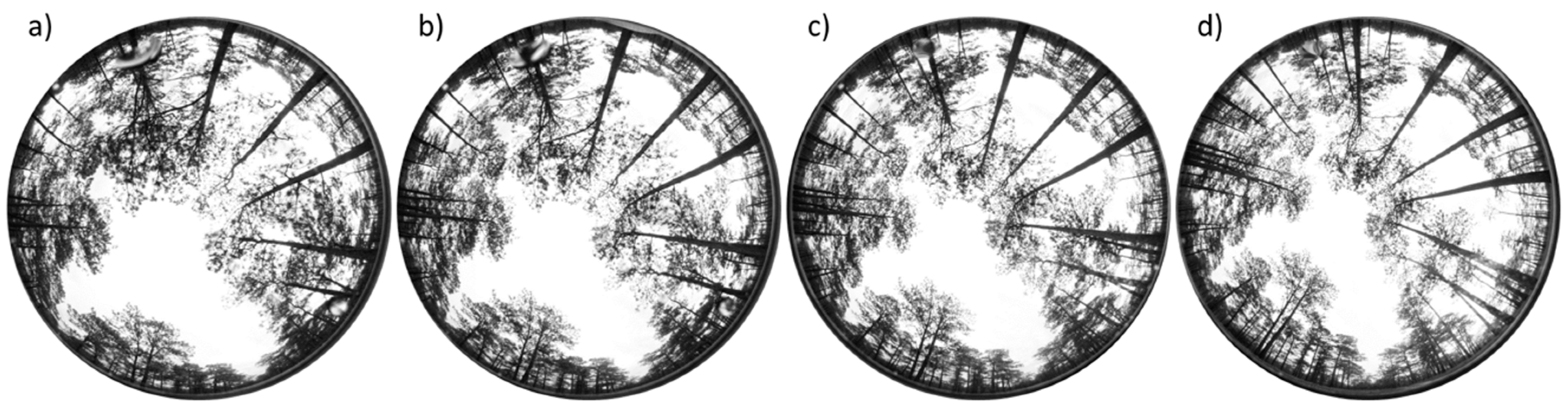
2.4.1. Digital Hemispherical Photography
2.4.2. Voxel-Based Estimates
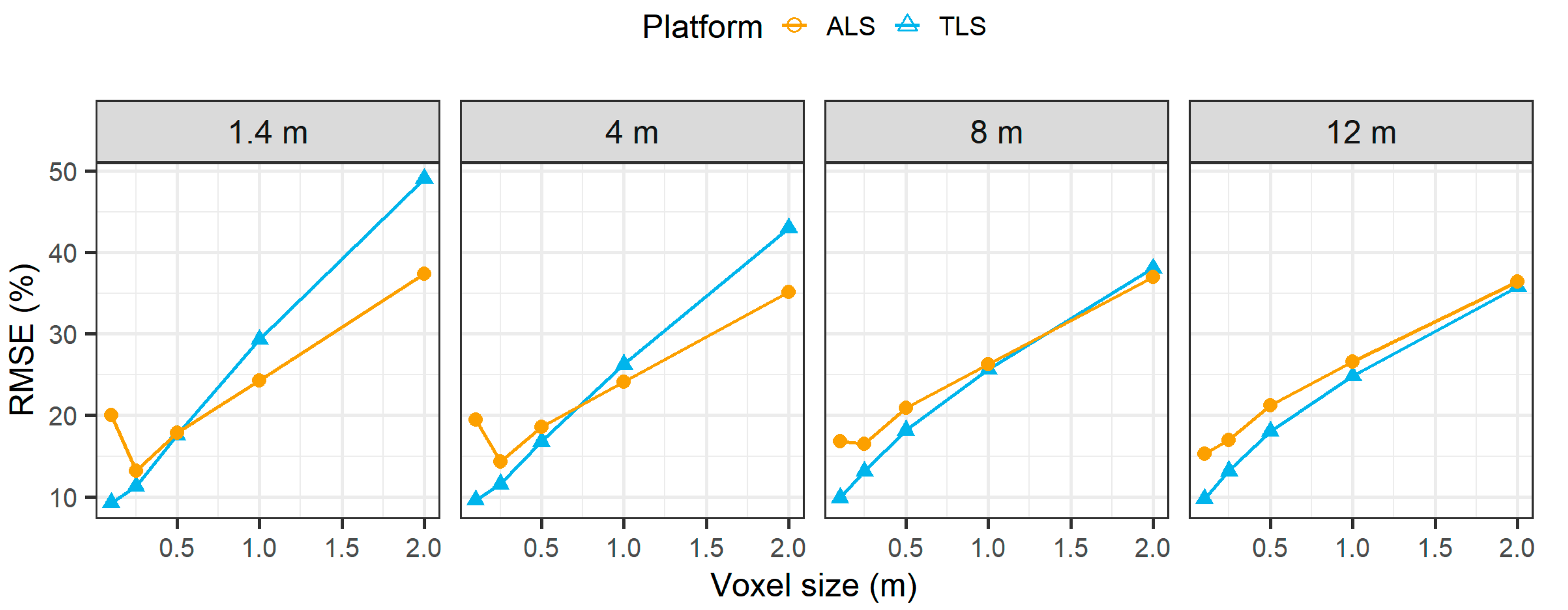
2.5. Model Evaluation
3. Results
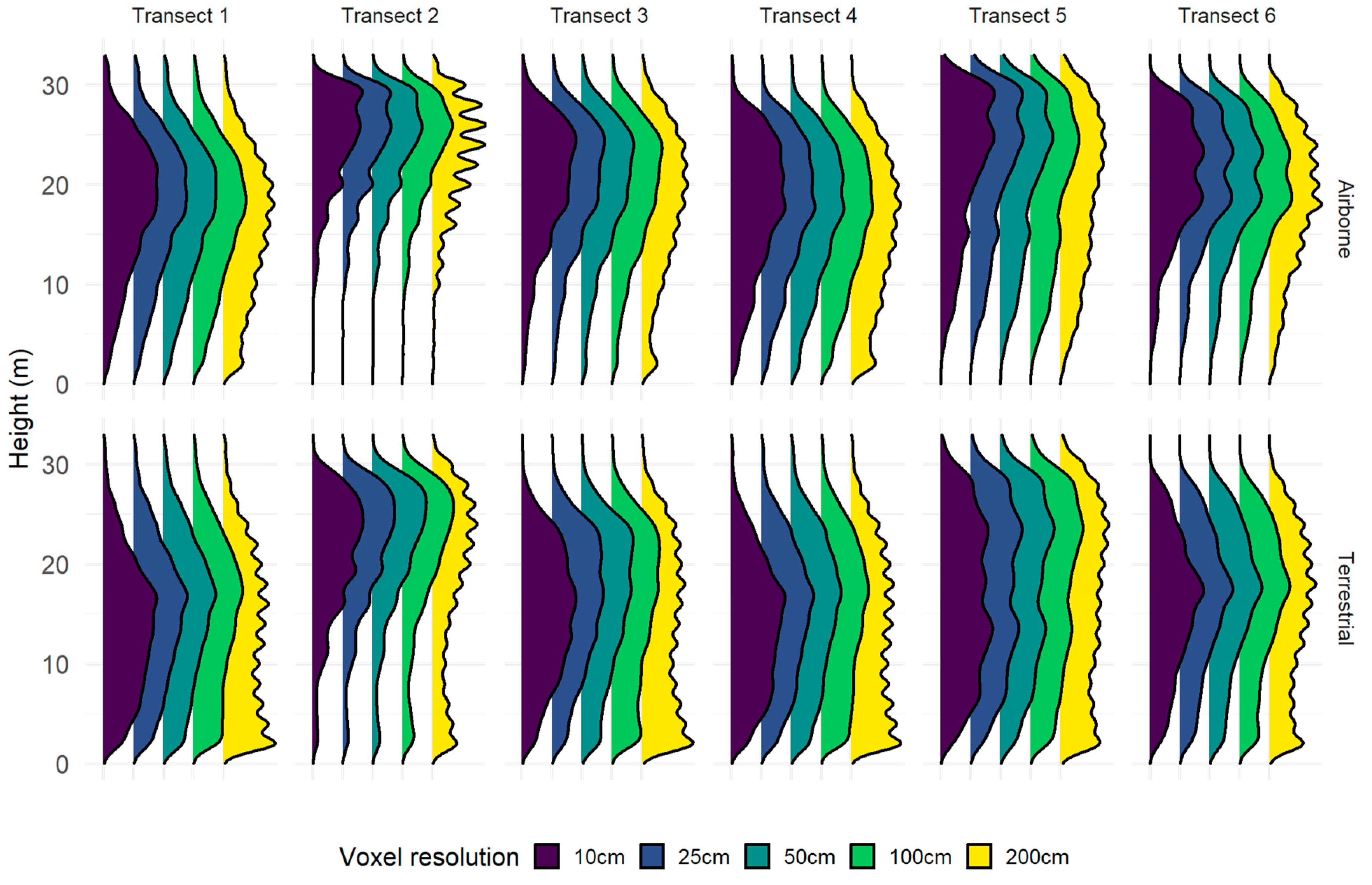
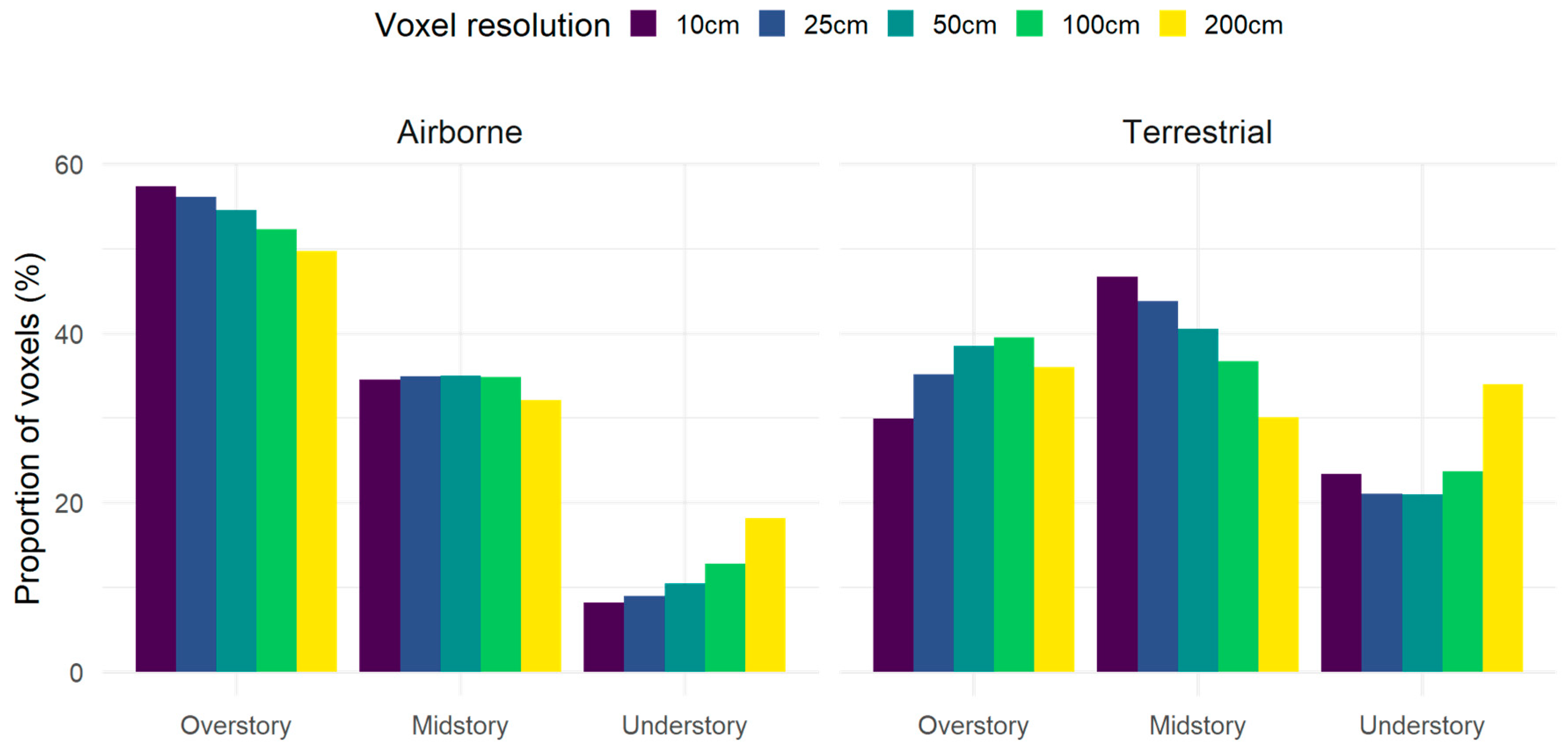
3.1. Point-Cloud Voxelization
3.2. Plot-Level Canopy Gaps
3.2.1. DHP-Derived Estimates
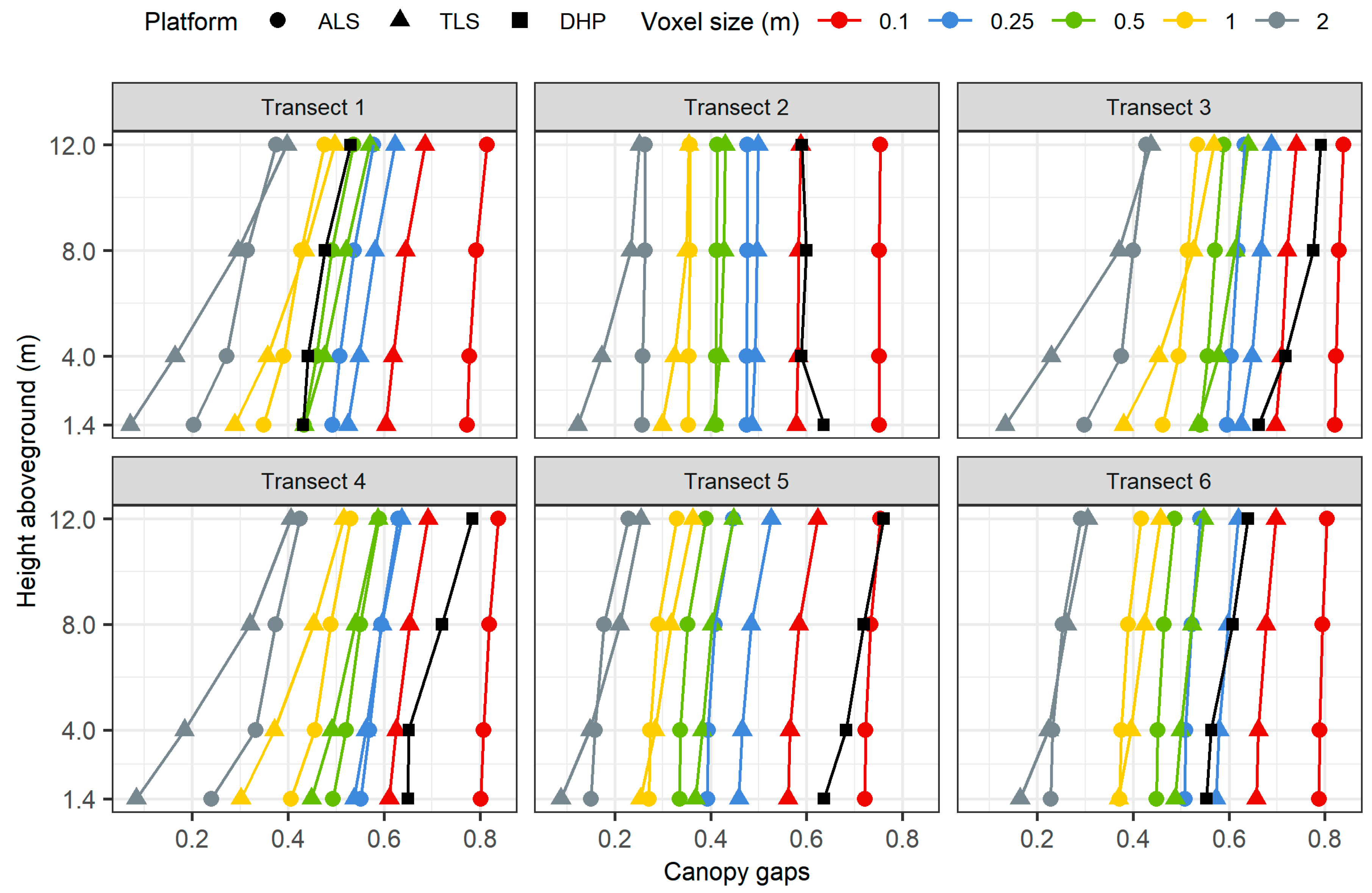
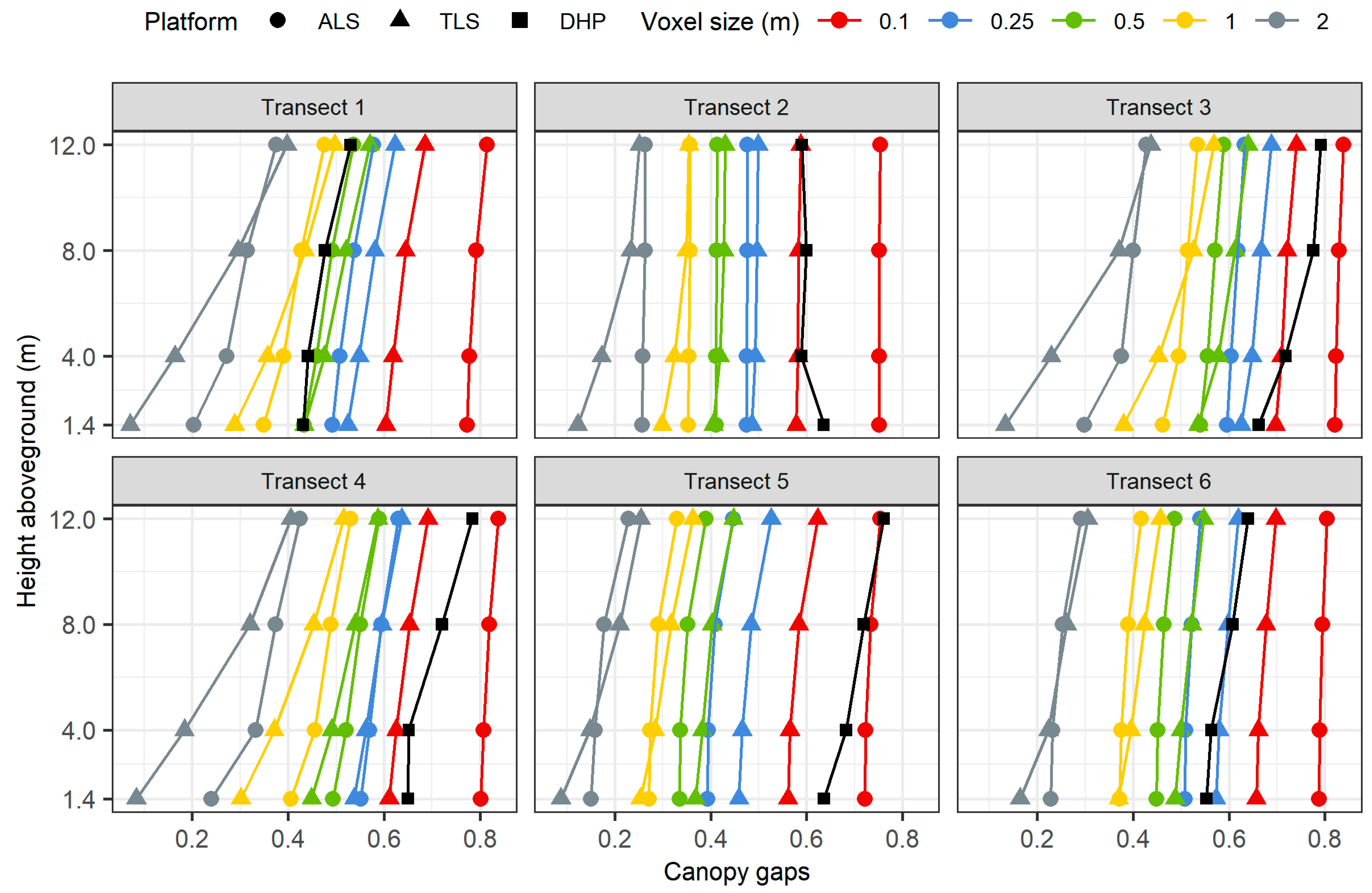
3.2.2. LiDAR-Derived Estimates
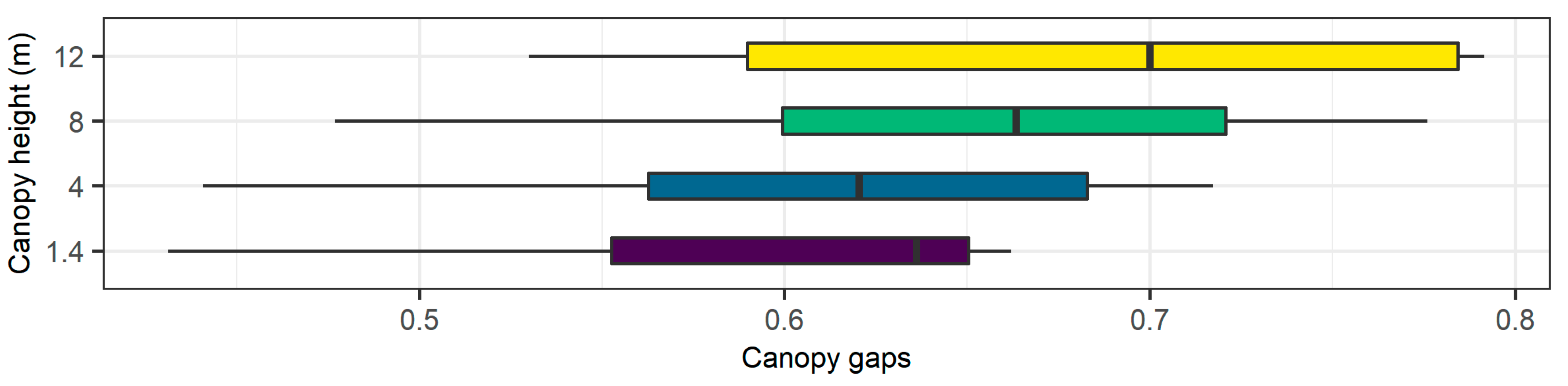
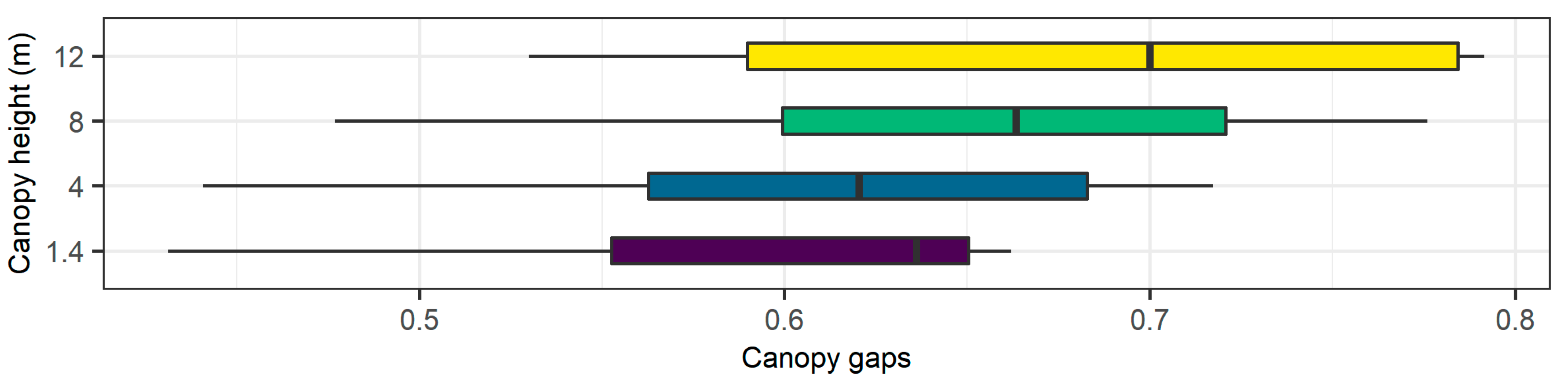
3.3. Stand-Level Canopy Gaps
4. Discussion
4.1. Voxel-Size Influence
4.2. Caveats and Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gonzalez-Benecke, C.A.; Zhao, D.; Samuelson, L.J.; Martin, T.A.; LeDuc, D.J.; Jack, S.B. Local and General Above-Ground Biomass Functions for Pinus Palustris Trees. Forests 2018, 9, 310. [Google Scholar] [CrossRef] [Green Version]
- Hudak, A.T.; Bright, B.C.; Pokswinski, S.M.; Loudermilk, E.L.; O’Brien, J.J.; Hornsby, B.S.; Klauberg, C.; Silva, C.A. Mapping Forest Structure and Composition from Low-Density LiDAR for Informed Forest, Fuel, and Fire Management at Eglin Air Force Base, Florida, USA. Can. J. Remote Sens. 2016, 42, 411–427. [Google Scholar] [CrossRef]
- Ross, C.W.; Hanan, N.P.; Prihodko, L.; Anchang, J.; Ji, W.; Yu, Q. Woody-biomass projections and drivers of change in sub-Saharan Africa. Nat. Clim. Chang. 2021, 1–7. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Battaglia, M.A.; Mitchell, R.J.; Mou, P.P.; Pecot, S.D. Light Transmittance Estimates in a Longleaf Pine Woodland. For. Sci. 2003, 49, 752–762. [Google Scholar]
- Gholz, H.L.; Vogel, S.A.; Cropper, W.P.; McKelvey, K.; Ewel, K.C.; Teskey, R.O.; Curran, P.J. Dynamics of Canopy Structure and Light Interception in Pinus Elliottii Stands, North Florida. Ecol. Monogr. 1991, 61, 33–51. [Google Scholar] [CrossRef] [Green Version]
- Swinehart, D.F. The Beer-Lambert Law. J. Chem. Educ. 1962, 39, 333. [Google Scholar] [CrossRef]
- Ross, J. The Radiation Regime and Architecture of Plant Stands (Tasks for Vegetation Science); Springer: Dordrecht, The Netherlands, 1981; ISBN 978-90-6193-607-7. [Google Scholar]
- Hawley, C.M.; Loudermilk, E.L.; Rowell, E.M.; Pokswinski, S. A novel approach to fuel biomass sampling for 3D fuel characterization. MethodsX 2018, 5, 1597–1604. [Google Scholar] [CrossRef]
- Hiers, J.K.; O’Brien, J.J.; Varner, J.M.; Butler, B.W.; Dickinson, M.; Furman, J.; Gallagher, M.; Godwin, D.; Goodrick, S.L.; Hood, S.M.; et al. Prescribed fire science: The case for a refined research agenda. Fire Ecol. 2020, 16, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Loudermilk, E.L.; Hiers, J.K.; O’Brien, J.J.; Mitchell, R.J.; Singhania, A.; Fernandez, J.C.; Cropper, W.P.; Slatton, K.C. Ground-based LIDAR: A novel approach to quantify fine-scale fuelbed characteristics. Int. J. Wildland Fire 2009, 18, 676–685. [Google Scholar] [CrossRef] [Green Version]
- Skowronski, N.S.; Gallagher, M.R.; Warner, T.A. Decomposing the Interactions between Fire Severity and Canopy Fuel Structure Using Multi-Temporal, Active, and Passive Remote Sensing Approaches. Fire 2020, 3, 7. [Google Scholar] [CrossRef] [Green Version]
- Battaglia, M.A.; Mou, P.; Palik, B.; Mitchell, R.J. The effect of spatially variable overstory on the understory light environment of an open-canopied longleaf pine forest. Can. J. For. Res. 2002, 32, 1984–1991. [Google Scholar] [CrossRef]
- Evans, G.C.; Coombe, D.E. Hemisperical and Woodland Canopy Photography and the Light Climate. J. Ecol. 1959, 47, 103. [Google Scholar] [CrossRef]
- Chianucci, F. An overview of in situ digital canopy photography in forestry. Can. J. For. Res. 2019, 227–242. [Google Scholar] [CrossRef]
- Jonckheere, I.; Nackaerts, K.; Muys, B.; Coppin, P. Assessment of automatic gap fraction estimation of forests from digital hemispherical photography. Agric. For. Meteorol. 2005, 132, 96–114. [Google Scholar] [CrossRef]
- Beckschäfer, P.; Seidel, D.; Kleinn, C.; Xu, J. On the exposure of hemispherical photographs in forests. iForest—Biogeosci. For. 2013, 6, 228–237. [Google Scholar] [CrossRef] [Green Version]
- Wagner, S. Calibration of grey values of hemispherical photographs for image analysis. Agric. For. Meteorol. 1998, 90, 103–117. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. Active Remote Sensing. In Computer Applications in Sustainable Forest Management; Springer: Berlin/Heidelberg, Germany, 2006; pp. 43–66. [Google Scholar]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018; ISBN 978-1-315-15438-1. [Google Scholar]
- Solberg, S. Mapping gap fraction, LAI and defoliation using various ALS penetration variables. Int. J. Remote Sens. 2010, 31, 1227–1244. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar Remote Sensing of the Canopy Structure and Biophysical Properties of Douglas-Fir Western Hemlock Forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Hamraz, H.; Contreras, M.A.; Zhang, J. Forest understory trees can be segmented accurately within sufficiently dense airborne laser scanning point clouds. Sci. Rep. 2017, 7, 6770. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising Structure in Laser Scanner Point Clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Wang, Y.; Fang, H. Estimation of LAI with the LiDAR Technology: A Review. Remote Sens. 2020, 12, 3457. [Google Scholar] [CrossRef]
- Cifuentes, R.; Van der Zande, D.; Farifteh, J.; Salas, C.; Coppin, P. Effects of voxel size and sampling setup on the estimation of forest canopy gap fraction from terrestrial laser scanning data. Agric. For. Meteorol. 2014, 194, 230–240. [Google Scholar] [CrossRef]
- Danson, F.M.; Hetherington, D.; Morsdorf, F.; Koetz, B.; Allgower, B. Forest Canopy Gap Fraction From Terrestrial Laser Scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef] [Green Version]
- Zheng, G.; Moskal, L.M.; Kim, S.-H. Retrieval of Effective Leaf Area Index in Heterogeneous Forests with Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 51, 777–786. [Google Scholar] [CrossRef]
- Takeda, T.; Oguma, H.; Sano, T.; Yone, Y.; Fujinuma, Y. Estimating the plant area density of a Japanese larch (Larix kaempferi Sarg.) plantation using a ground-based laser scanner. Agric. For. Meteorol. 2008, 148, 428–438. [Google Scholar] [CrossRef]
- Wang, L.; Xu, Y.; Li, Y.; Zhao, Y. Voxel segmentation-based 3D building detection algorithm for airborne LIDAR data. PLoS ONE 2018, 13, e0208996. [Google Scholar] [CrossRef]
- Lecigne, B.; Delagrange, S.; Messier, C. Exploring trees in three dimensions: VoxR, a novel voxel-based R package dedicated to analysing the complex arrangement of tree crowns. Ann. Bot. 2017, 121, 589–601. [Google Scholar] [CrossRef]
- Béland, M.; Baldocchi, D.D.; Widlowski, J.-L.; Fournier, R.A.; Verstraete, M. On seeing the wood from the leaves and the role of voxel size in determining leaf area distribution of forests with terrestrial LiDAR. Agric. For. Meteorol. 2014, 184, 82–97. [Google Scholar] [CrossRef]
- Gilliam, F.S.; Platt, W.J. Effects of long-term fire exclusion on tree species composition and stand structure in an old-growth Pinus palustris (Longleaf pine) forest. Plant Ecol. 1999, 140, 15–26. [Google Scholar] [CrossRef]
- Fowler, C.; Konopik, E. The History of Fire in the Southern United States. Hum. Ecol. Rev. 2007, 14, 176. [Google Scholar]
- Loudermilk, E.L.; Cropper, W.P.; Mitchell, R.J.; Lee, H. Longleaf pine (Pinus palustris) and hardwood dynamics in a fire-maintained ecosystem: A simulation approach. Ecol. Model. 2011, 222, 2733–2750. [Google Scholar] [CrossRef]
- Provencher, L.; Litt, A.R.; Gordon, D.R.; Rodgers, H.L.; Herring, B.J.; Galley, K.E.M.; McAdoo, J.P.; McAdoo, S.J.; Gobris, N.M.; Hardesty, J.L. Restoration Fire and Hurricanes in Longleaf Pine Sandhills. Ecol. Restor. 2001, 19, 92–98. [Google Scholar] [CrossRef]
- O’Brien, J.J.; Hiers, J.K.; Callaham, M.A.; Mitchell, R.J.; Jack, S.B. Interactions among Overstory Structure, Seedling Life-history Traits, and Fire in Frequently Burned Neotropical Pine Forests. Ambio 2008, 37, 542–547. [Google Scholar] [CrossRef]
- Palik, B.J.; Mitchell, R.J.; Houseal, G.; Pederson, N. Effects of canopy structure on resource availability and seedling responses in a longleaf pine ecosystem. Can. J. For. Res. 1997, 27, 1458–1464. [Google Scholar] [CrossRef]
- Jose, S.; Jokela, E.J.; Miller, D.L. (Eds.) The Longleaf Pine Ecosystem. In The Longleaf Pine Ecosystem: Ecology, Silviculture, and Restoration; Springer Series on Environmental Management; Springer: New York, NY, USA, 2006; pp. 3–8. ISBN 978-0-387-30687-2. [Google Scholar]
- Mitchell, R.; Engstrom, T.; Sharitz, R.R.; De Steven, D.; Hiers, K.; Cooper, R.; Katherine, L. Old Forests and Endangered Woodpeckers: Old-Growth in the Southern Coastal Plain. Nat. Areas J. 2009, 29, 301–310. [Google Scholar] [CrossRef] [Green Version]
- West, D.C.; Doyle, T.W.; Tharp, M.L.; Beauchamp, J.J.; Platt, W.J.; Downing, D.J. Recent growth increases in old-growth longleaf pine. Can. J. For. Res. 1993, 23, 846–853. [Google Scholar] [CrossRef]
- Kahle, D.; Wickham, H. ggmap: Spatial Visualization with ggplot2. R J. 2013, 5, 144–161. [Google Scholar] [CrossRef] [Green Version]
- Walker, K. Tigris: Load Census TIGER/Line Shapefiles; 2021; Available online: https://cran.r-project.org/web/packages/tigris/tigris.pdf (accessed on 31 December 2021).
- Beck, H.E.; Zimmermann, N.E.; McVicar, T.R.; Vergopolan, N.; Berg, A.; Wood, E.F. Present and future Köppen-Geiger climate classification maps at 1-km resolution, Scientific Data. Nature 2018, 5, 180214. [Google Scholar] [CrossRef] [Green Version]
- Robertson, K.M.; Platt, W.J.; Faires, C.E. Patchy Fires Promote Regeneration of Longleaf Pine (Pinus palustris Mill.) in Pine Savannas. Forests 2019, 10, 367. [Google Scholar] [CrossRef] [Green Version]
- Sanders, T. Soil Survey of Leon County; U.S. Department of Agriculture Soil Conservation Service: Leon County, FL, USA, 1981.
- Glitzenstein, J.S.; Platt, W.J.; Streng, D.R. Effects of Fire Regime and Habitat on Tree Dynamics in North Florida Longleaf Pine Savannas. Ecol. Monogr. 1995, 65, 441–476. [Google Scholar] [CrossRef]
- Jarvis, R. A Four Wheel Drive Boom Lift Robot for Bush Fire Fighting. In Experimental Robotics: The 10th International Symposium on Experimental Robotics; Khatib, O., Kumar, V., Rus, D., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 245–255. ISBN 978-3-540-77457-0. [Google Scholar]
- R Core Team R. A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Finley, A.; Banerjee, S.; Hjelle, Ø. MBA: Multilevel B-Spline Approximation; 2017; Available online: https://rdrr.io/cran/MBA/ (accessed on 31 December 2021).
- Lee, S.; Wolberg, G.; Shin, S.Y. Scattered data interpolation with multilevel B-splines. IEEE Trans. Vis. Comput. Graph. 1997, 3, 228–244. [Google Scholar] [CrossRef] [Green Version]
- Guay, R. WinSCANOPY 2014 for Canopy Analysis; WinSCANOPY Manual Version 2014a; Regent Instruments Inc.: Quebec City, QC, Canada, 2014. [Google Scholar]
- Wickham, H.; François, R.; Henry, L.; Müller, K. Dplyr: A Grammar of Data Manipulation. 2021; Available online: https://dplyr.tidyverse.org/ (accessed on 31 December 2021).
- Brockway, D.G.; Outcalt, K.W. Gap-phase regeneration in longleaf pine wiregrass ecosystems. For. Ecol. Manag. 1998, 106, 125–139. [Google Scholar] [CrossRef]
- Kükenbrink, D.; Schneider, F.D.; Leiterer, R.; Schaepman, M.; Morsdorf, F. Quantification of hidden canopy volume of airborne laser scanning data using a voxel traversal algorithm. Remote Sens. Environ. 2017, 194, 424–436. [Google Scholar] [CrossRef]
- Zong, X.; Wang, T.; Skidmore, A.K.; Heurich, M. The impact of voxel size, forest type, and understory cover on visibility estimation in forests using terrestrial laser scanning. GIScience Remote Sens. 2021, 58, 323–339. [Google Scholar] [CrossRef]
- Mitchell, R.J.; Hiers, J.K.; O’Brien, J.J.; Jack, S.B.; Engstrom, R.T. Silviculture that sustains: The nexus between silviculture, frequent prescribed fire, and conservation of biodiversity in longleaf pine forests of the southeastern United States. Can. J. For. Res. 2006, 36, 2724–2736. [Google Scholar] [CrossRef] [Green Version]
- Franklin, J.F.; Mitchell, R.J.; Palik, B.J. Natural Disturbance and Stand Development Principles for Ecological Forestry; Tech. Rep. NRS-19; Newton Square, PA.; U.S. Department of Agriculture, Forest Service, Northern Research Station: Leon County, FL, USA, 2007; Volume 19, p. 44. [CrossRef] [Green Version]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ross, C.W.; Loudermilk, E.L.; Skowronski, N.; Pokswinski, S.; Hiers, J.K.; O’Brien, J. LiDAR Voxel-Size Optimization for Canopy Gap Estimation. Remote Sens. 2022, 14, 1054. https://doi.org/10.3390/rs14051054
Ross CW, Loudermilk EL, Skowronski N, Pokswinski S, Hiers JK, O’Brien J. LiDAR Voxel-Size Optimization for Canopy Gap Estimation. Remote Sensing. 2022; 14(5):1054. https://doi.org/10.3390/rs14051054
Chicago/Turabian StyleRoss, C. Wade, E. Louise Loudermilk, Nicholas Skowronski, Scott Pokswinski, J. Kevin Hiers, and Joseph O’Brien. 2022. "LiDAR Voxel-Size Optimization for Canopy Gap Estimation" Remote Sensing 14, no. 5: 1054. https://doi.org/10.3390/rs14051054
APA StyleRoss, C. W., Loudermilk, E. L., Skowronski, N., Pokswinski, S., Hiers, J. K., & O’Brien, J. (2022). LiDAR Voxel-Size Optimization for Canopy Gap Estimation. Remote Sensing, 14(5), 1054. https://doi.org/10.3390/rs14051054