
Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods and Data Sources
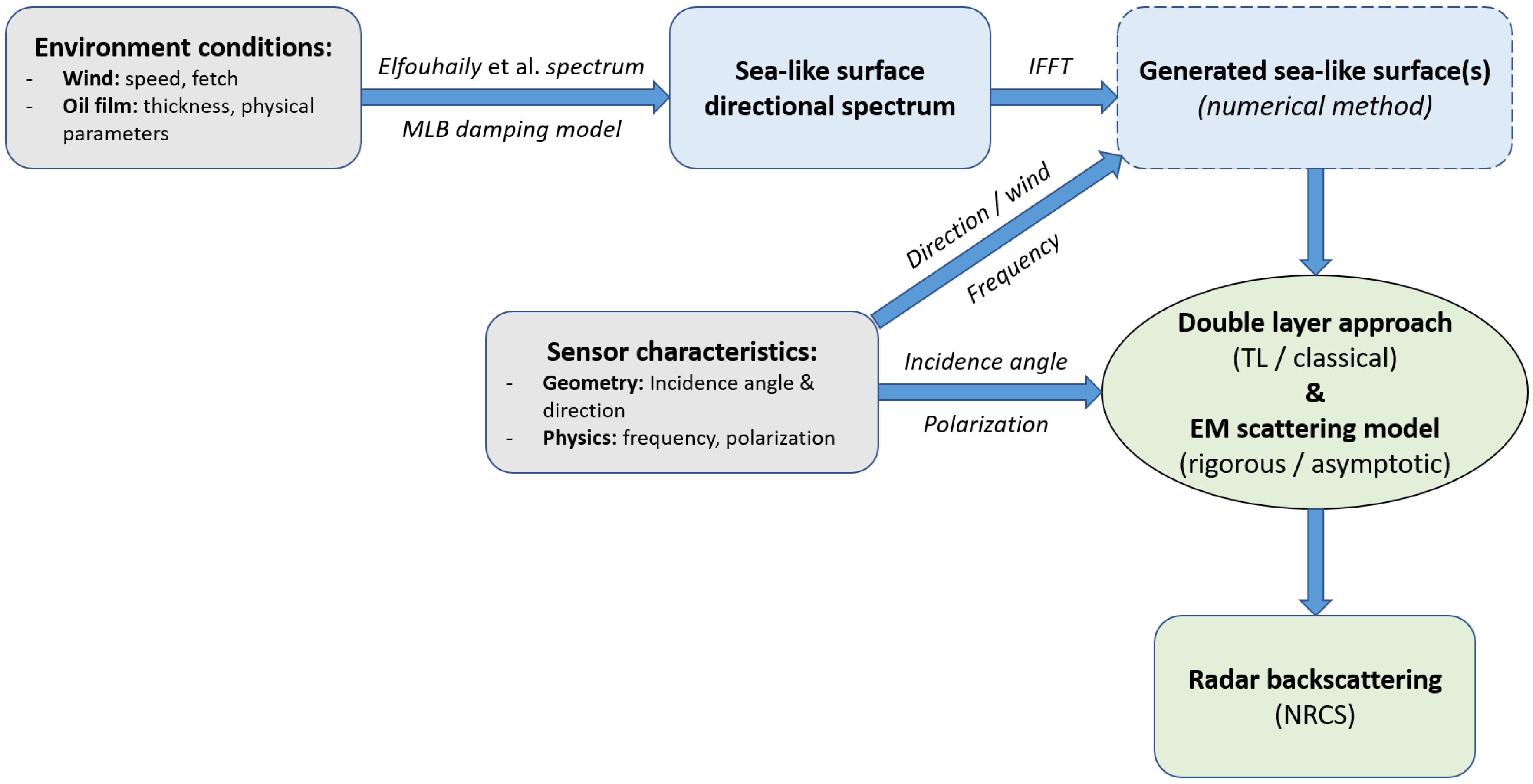
2.1. Methods
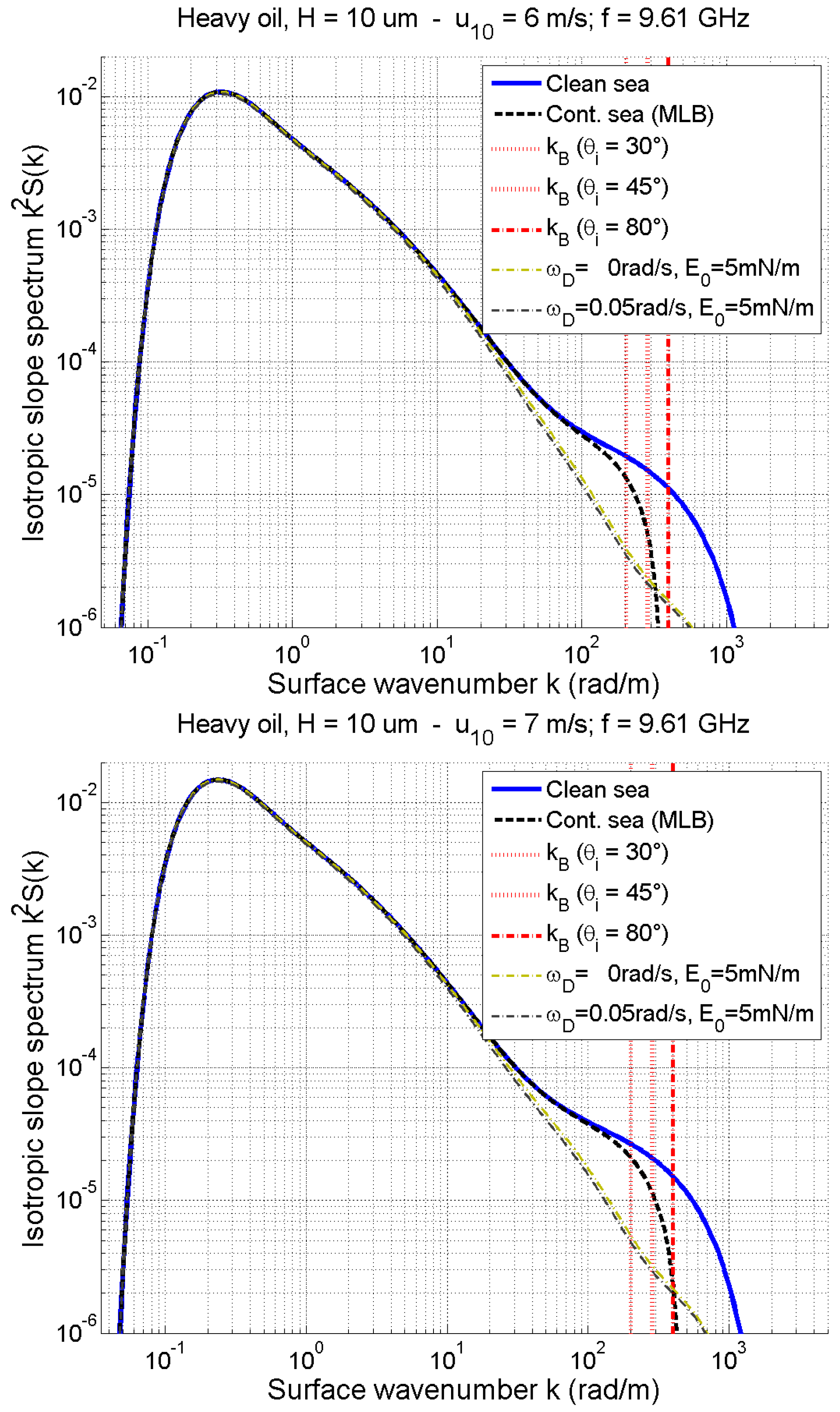
- The sea-like surface spectrum is defined with respect to the environment conditions, by using the Elfouhaily et al. spectrum model for the clean sea surface; for the case of oil films, the MLB model is used to model the surface spectrum damping.
- For the case of numerical EM methods, sea-like surfaces must be generated from the directional spectrum by IFFT (Inverse Fast Fourier Transform), given the frequency of the sensor and its azimuth direction with respect to the wind direction (in addition to the environment condition parameters).
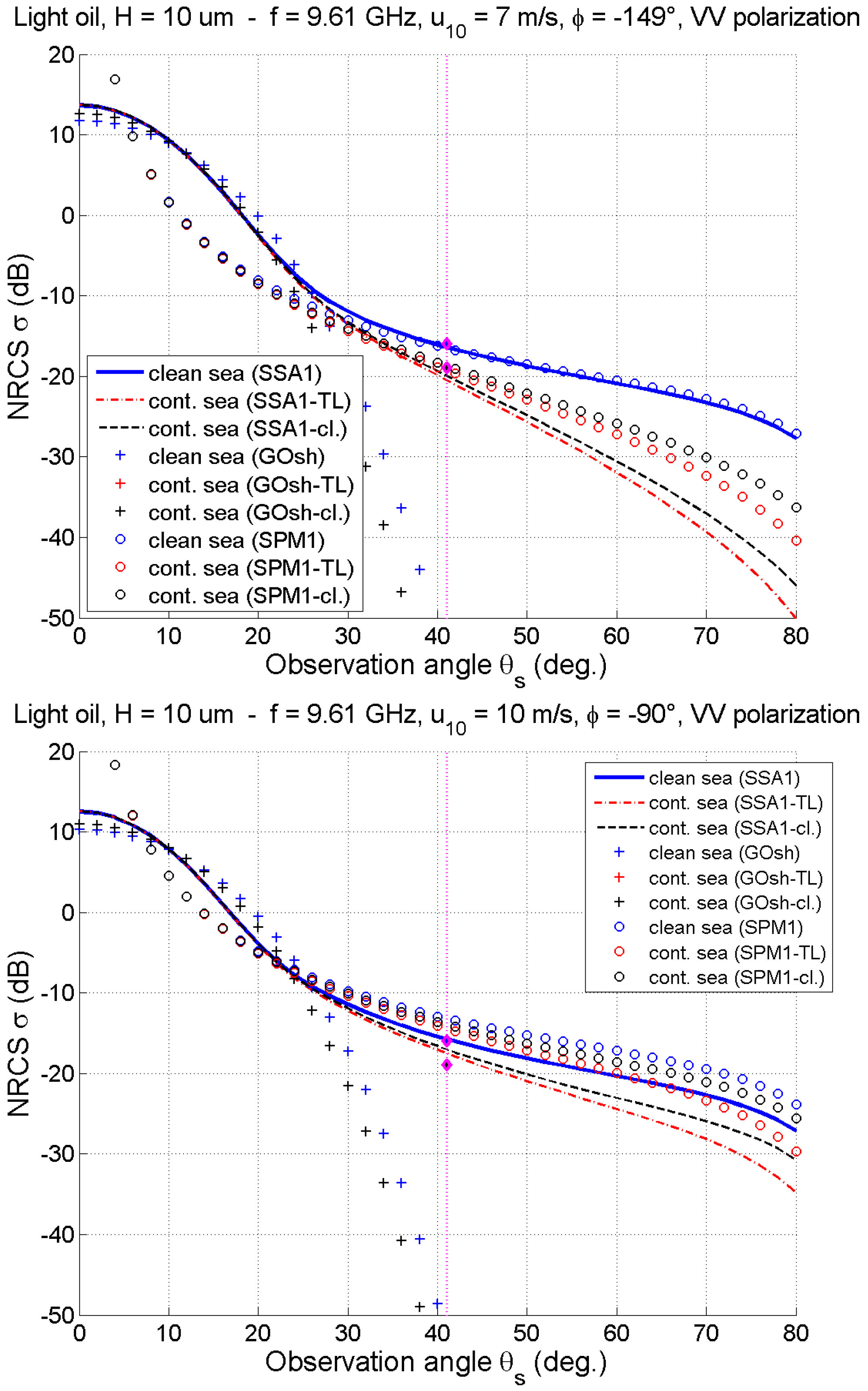
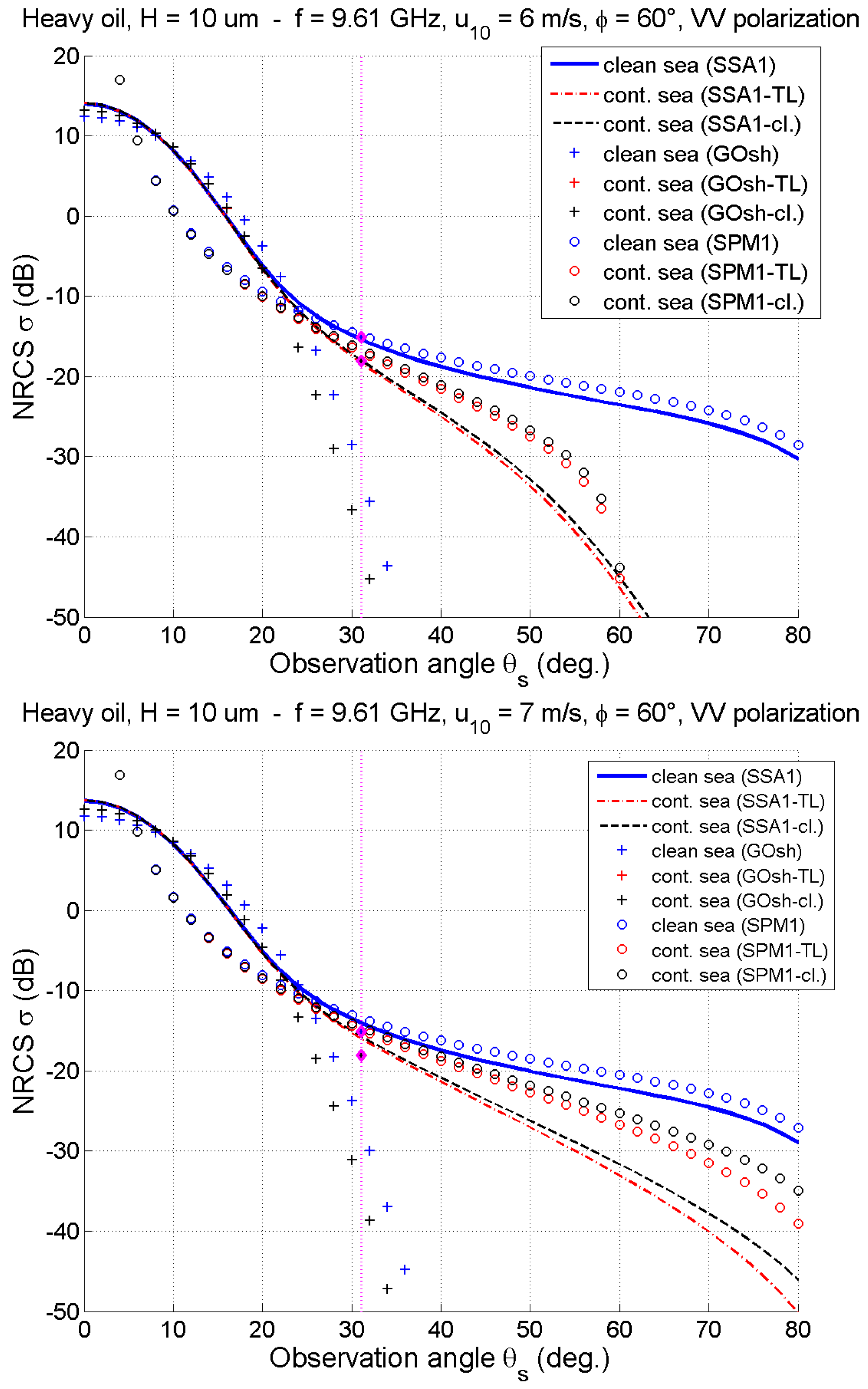
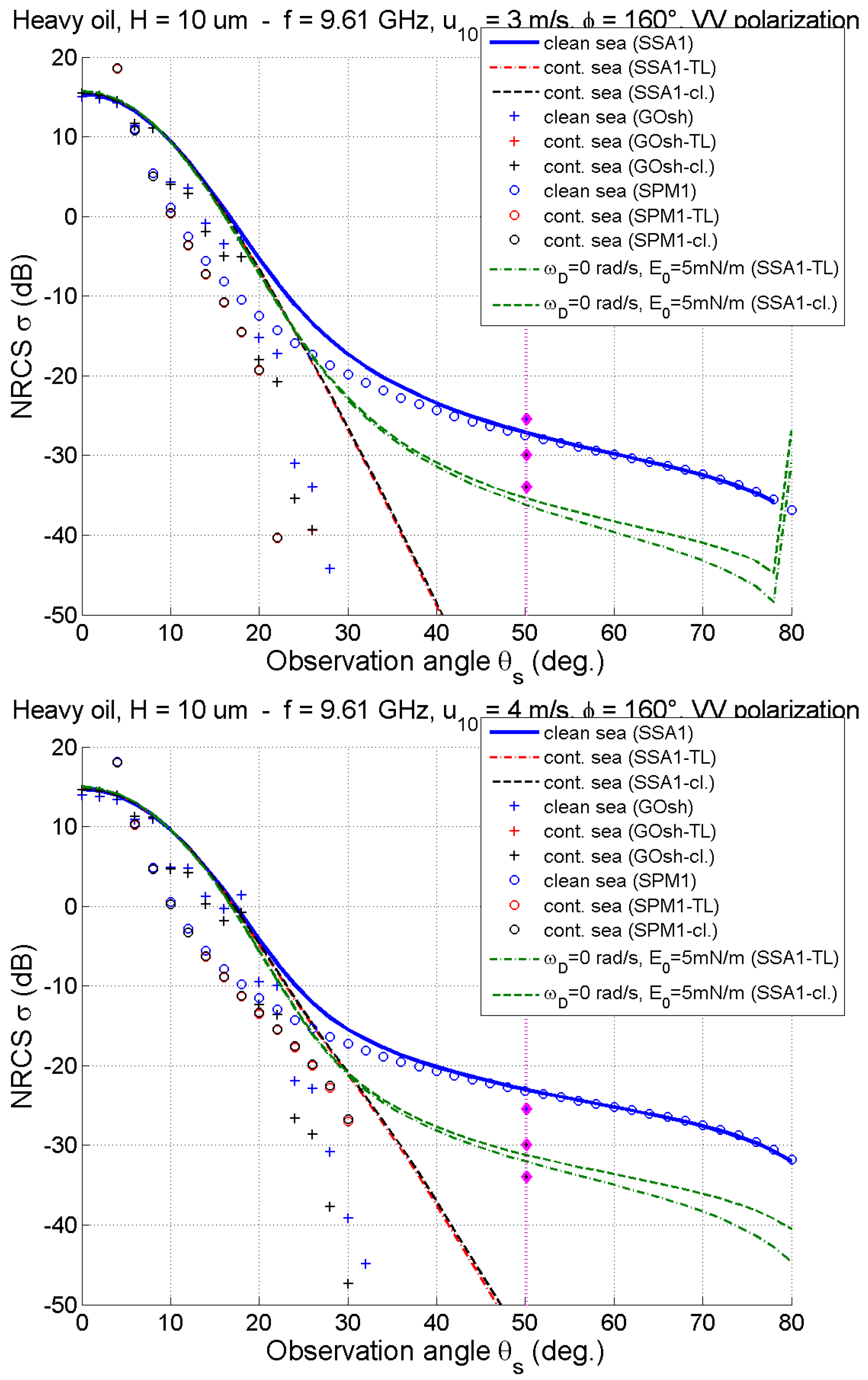
- A simplifying approach for reducing the double layer (air/oil and oil/sea) problem to a single interface problem is elected; then, to deal with the latter problem, an appropriate electromagnetic model is applied. The simplifying approach is either the “thin-layer” (TL) or the classical approach; the EM scattering model may be either rigorous (based on the Method of Moments, MoM) or asymptotic (in particular, the SSA1). This makes it possible to calculate the scattered wave, and in particular, the backscattered intensity (NRCS, Normalized Radar Cross Section).
2.2. Data Sources
- 1.
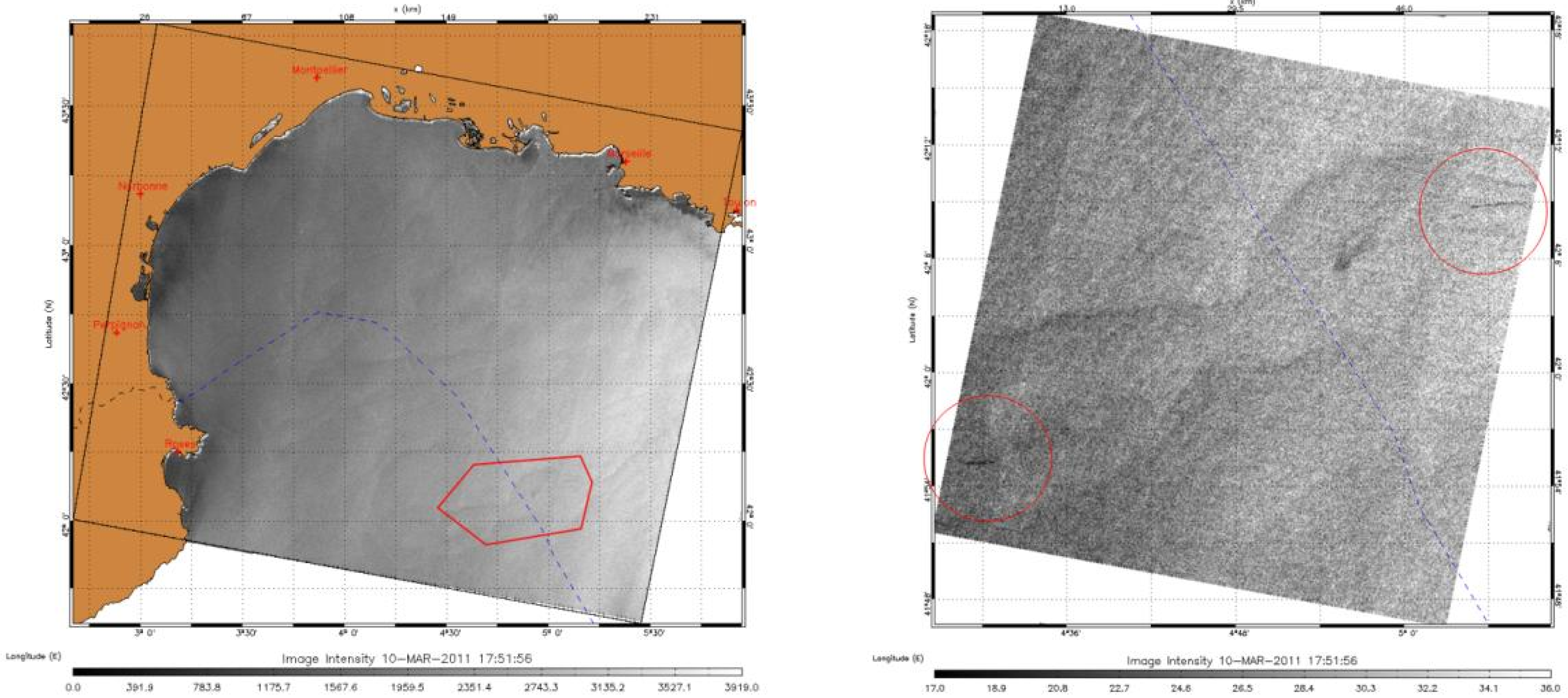
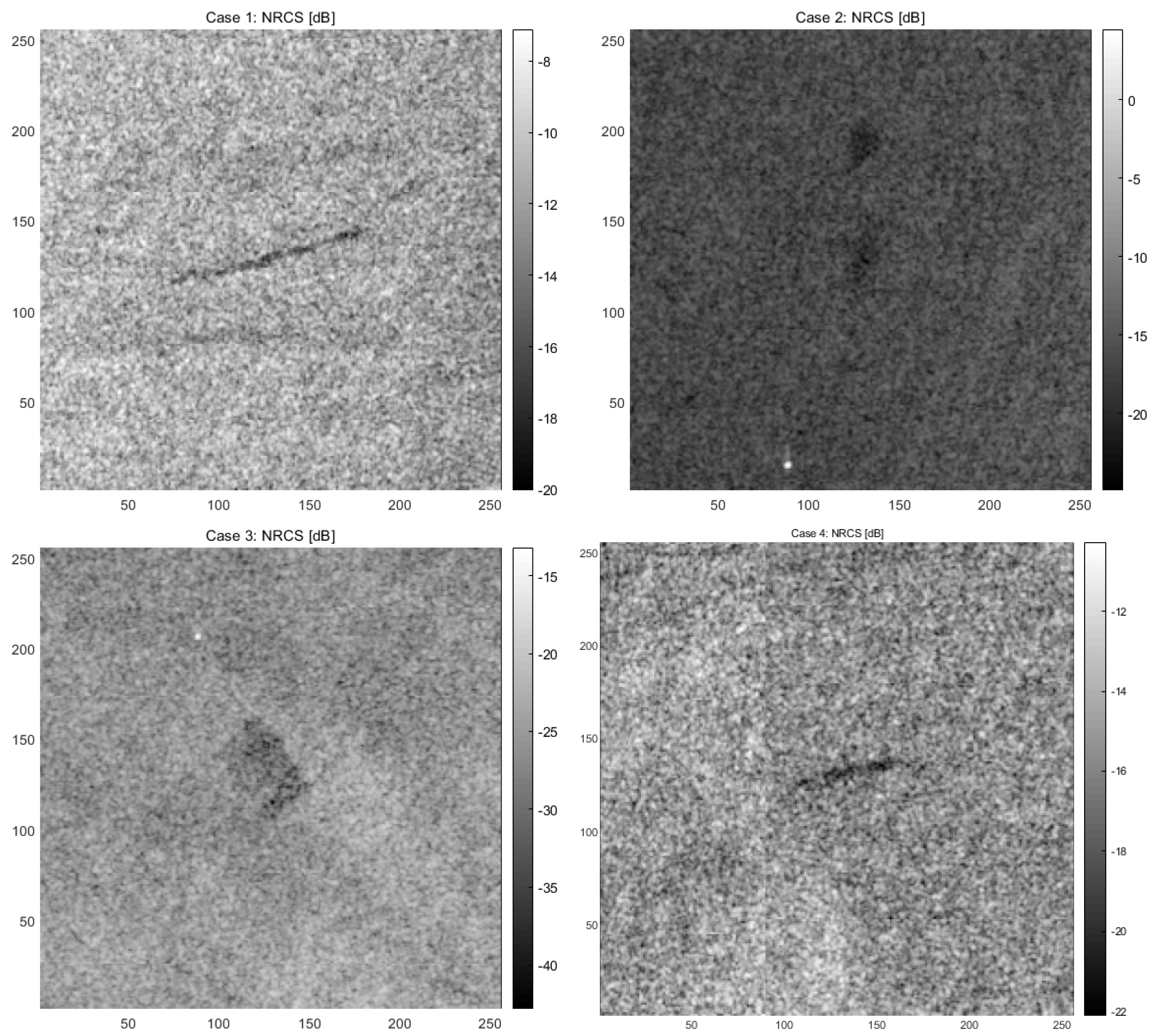
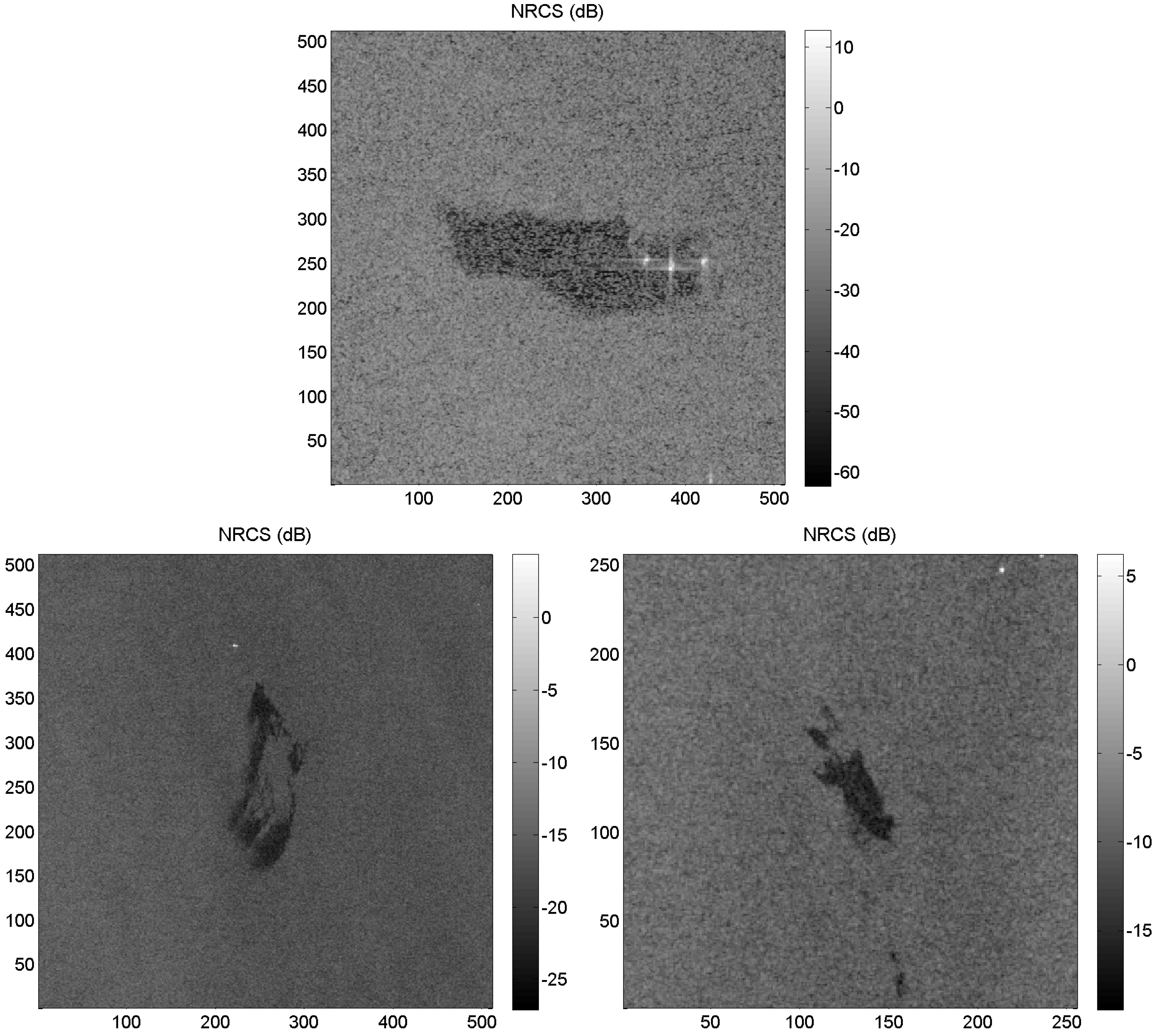
- The first case study concerns the images in Figure 2, taken on 10 March 2011, 17 h 51. Two areas are concerned by potential oil spills: the Western one (area about km–length km) and the Eastern one (area km–length km). The incidence angle is equal to about and for the South West and North East cases, respectively. The average estimated wind speed is m/s and m/s, respectively. Note that, in Section 5.1, the Western area will be considered and referred to as scenario 1, whereas the Eastern area will be considered and referred to as scenario 4.
- 2.
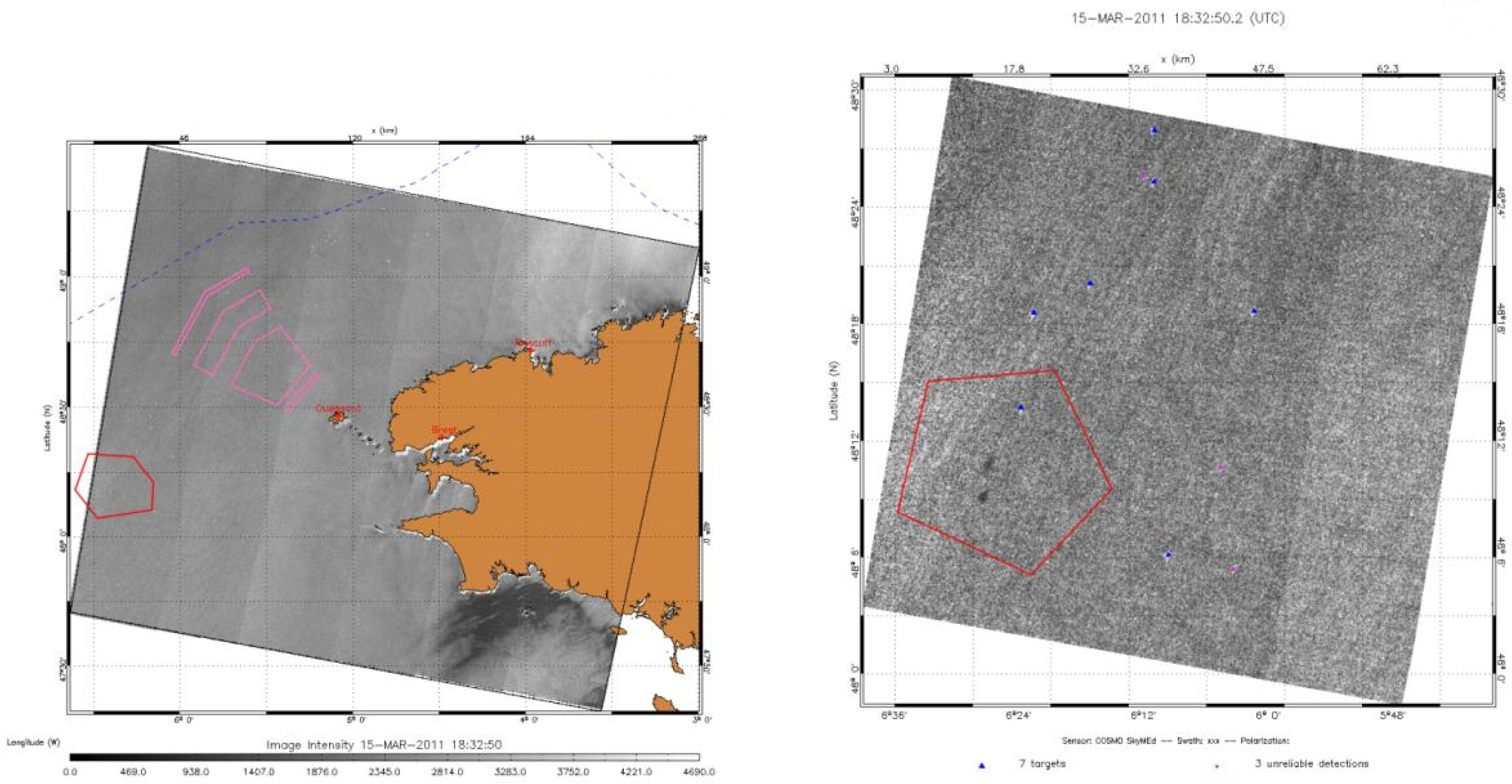
- The second case study concerns the images in Figure 3, taken on 15 March 2011, 18 h 32. One area is concerned by 2 potential oil spills: the Northern one (area about km–length km) and the Southern one (area about km, length km). The incidence angle is equal to in this area. The average estimated wind speed is m/s. Note that, in Section 5.1, only the Southern area will be considered and referred to as scenario 2.
- 3.
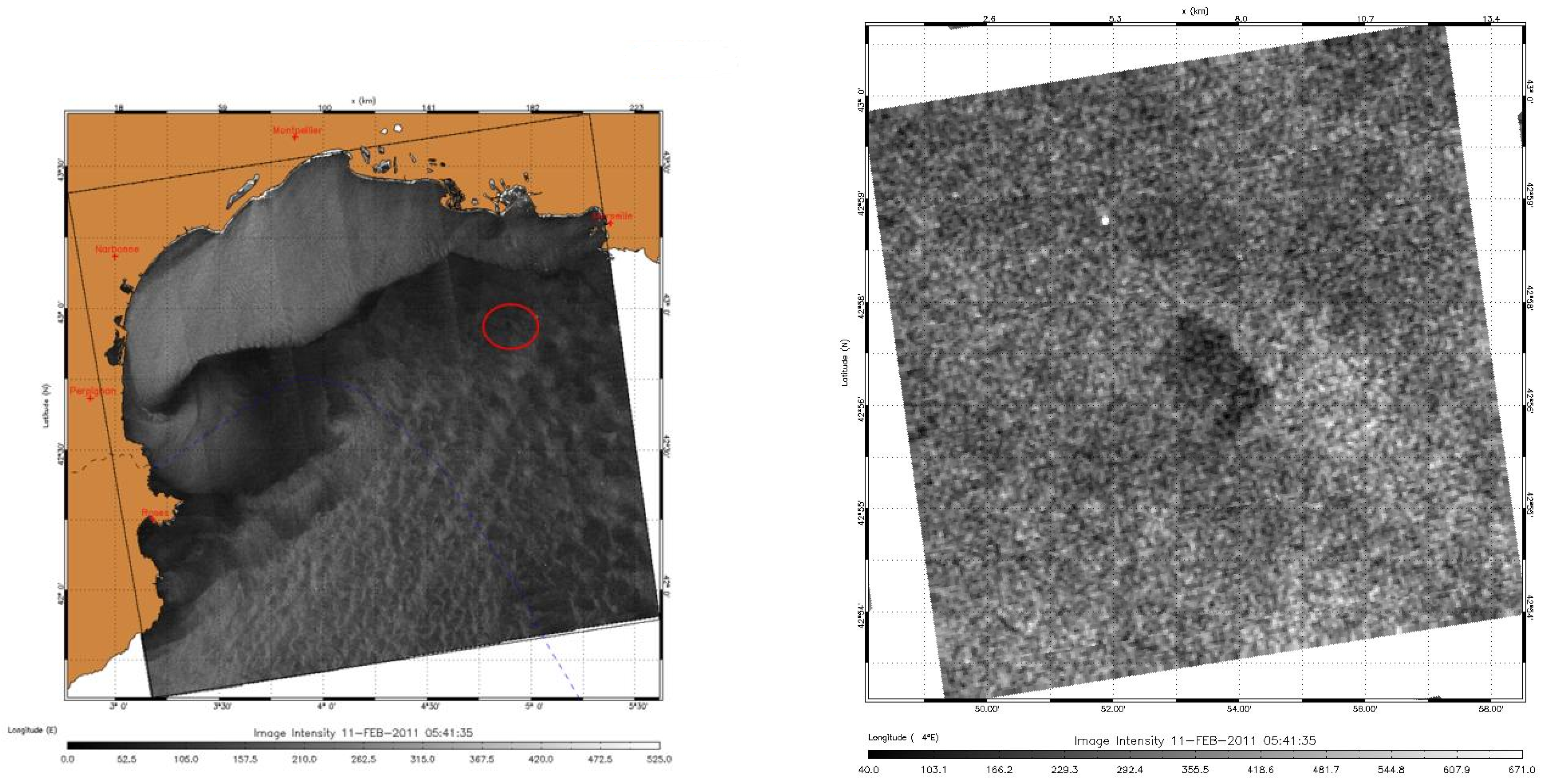
- The third case study concerns the images in Figure 4, taken on 11 February 2011, 5 h 41. One area is concerned by 1 potential oil spill: area about km–width km. The incidence angle is equal to in this area. The average estimated wind speed is m/s. Note that, in Section 5.1, this area will be referred to as scenario 3.
- 1.
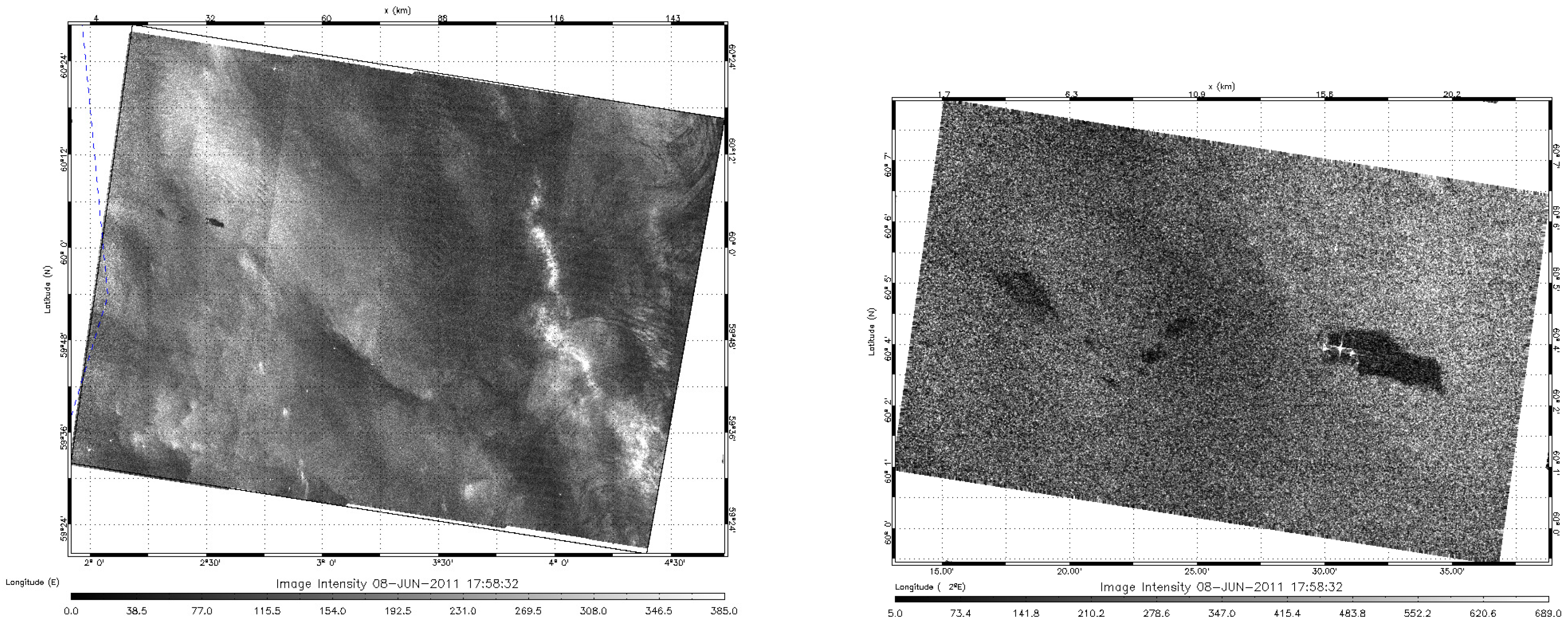
- The first case study concerns the images in Figure 5, taken on 8 June 2011, 17 h 58. It is a ScanSAR Wide (X band) image in VV polarization. The incidence angle is equal to about in the area of the pollution, where the average estimated wind speed is m/s.
- 2.
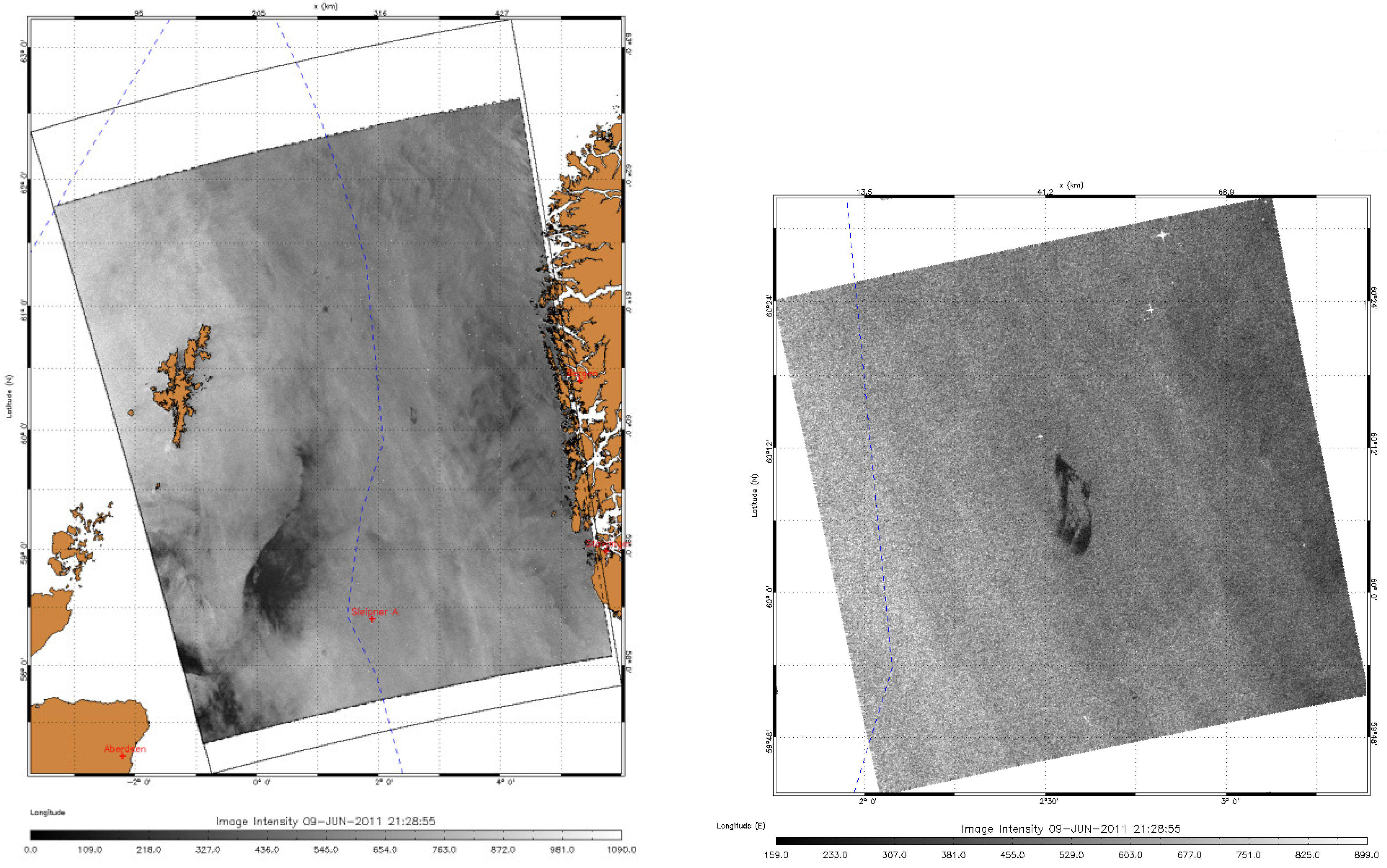
- The second case study concerns the images in Figure 6, taken on 9 June 2011, 21 h 28. It is an ASAR/ENVISAT (C band) image in VV polarization. The incidence angle is equal to about in the area of the pollution, where the average estimated wind speed is m/s.
- 3.
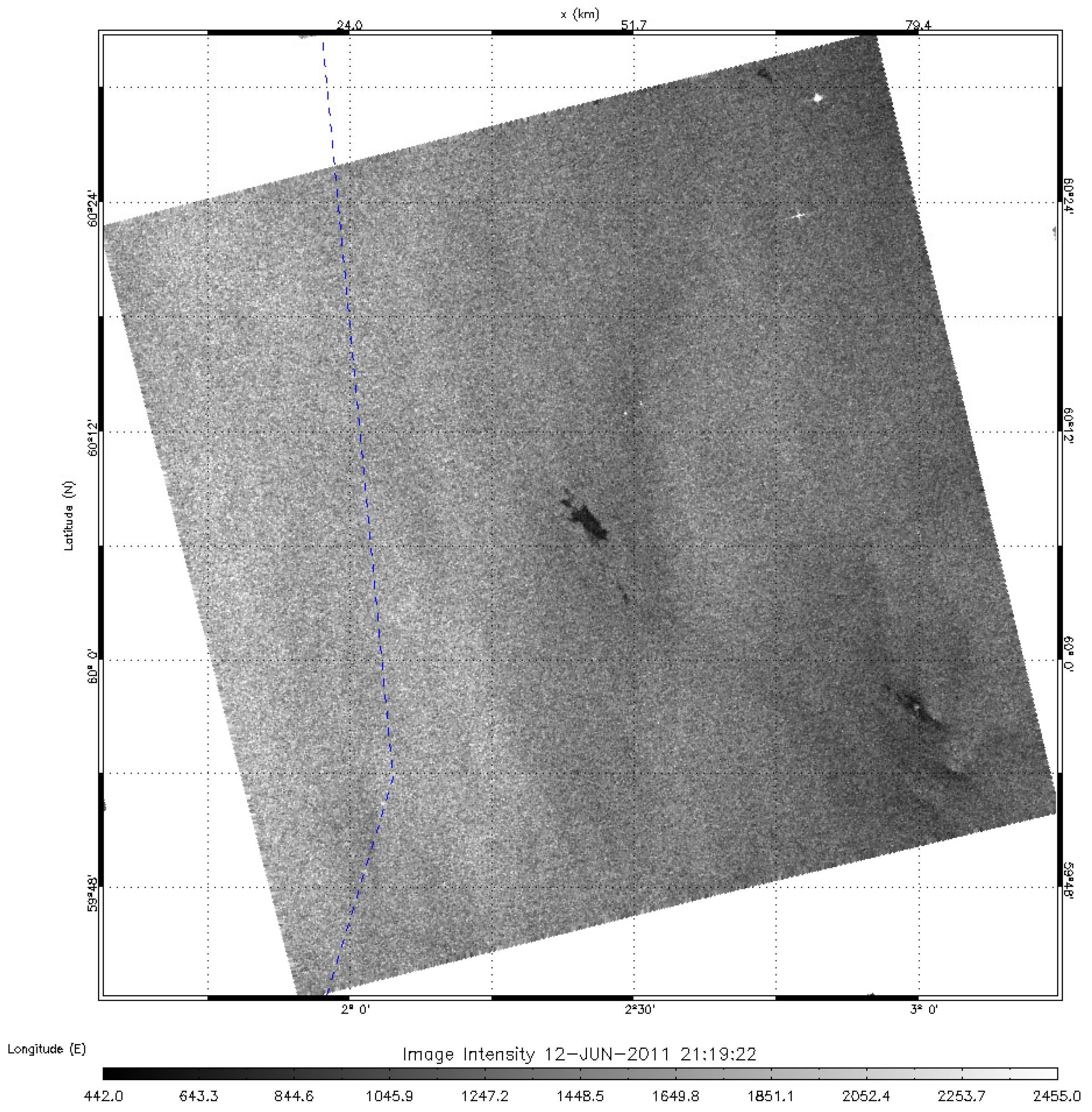
- The third case study concerns the images in Figure 7, taken on 12 June 2011, 21 h 18. It is an ASAR/ENVISAT (C band) image in VV polarization. The incidence angle is equal to about in the area of the pollution, where the average estimated wind speed is m/s.
3. Influence of Emulsification
4. From 2D Problems to 3D Problems
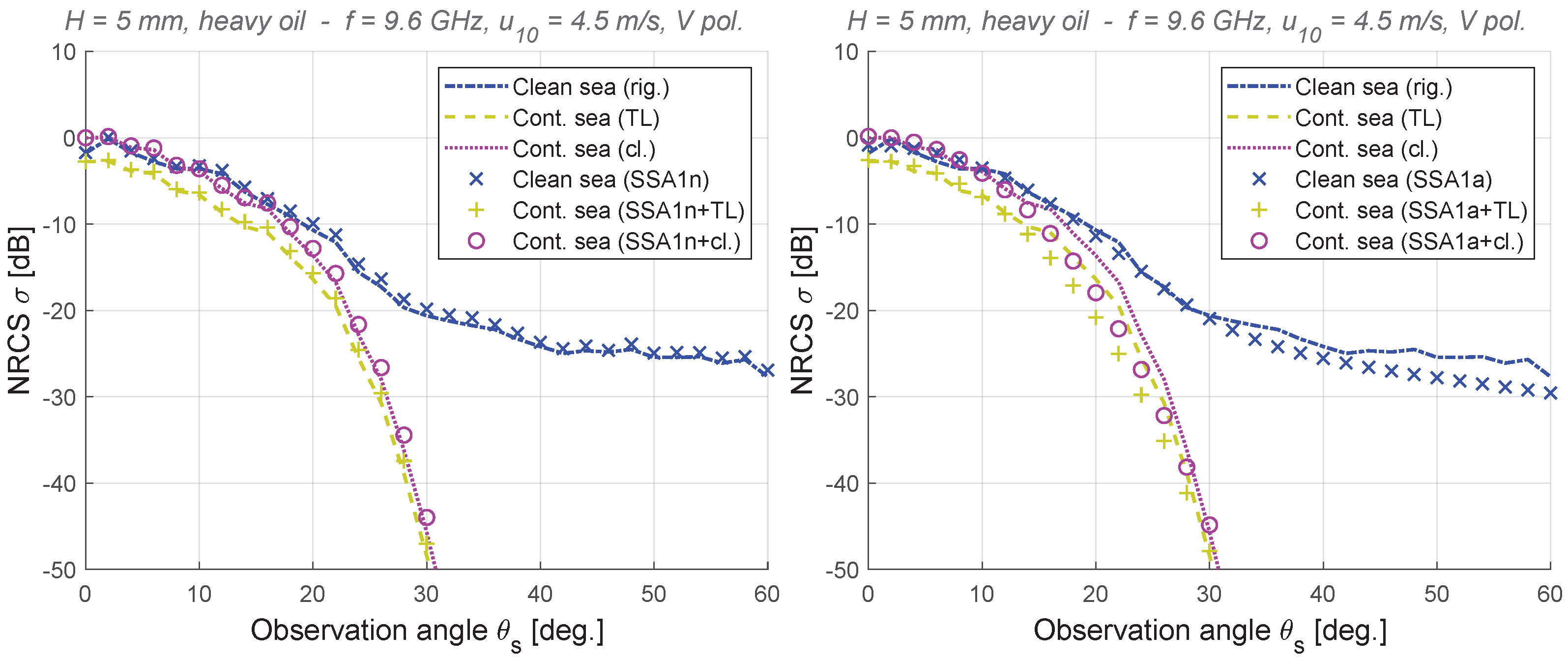
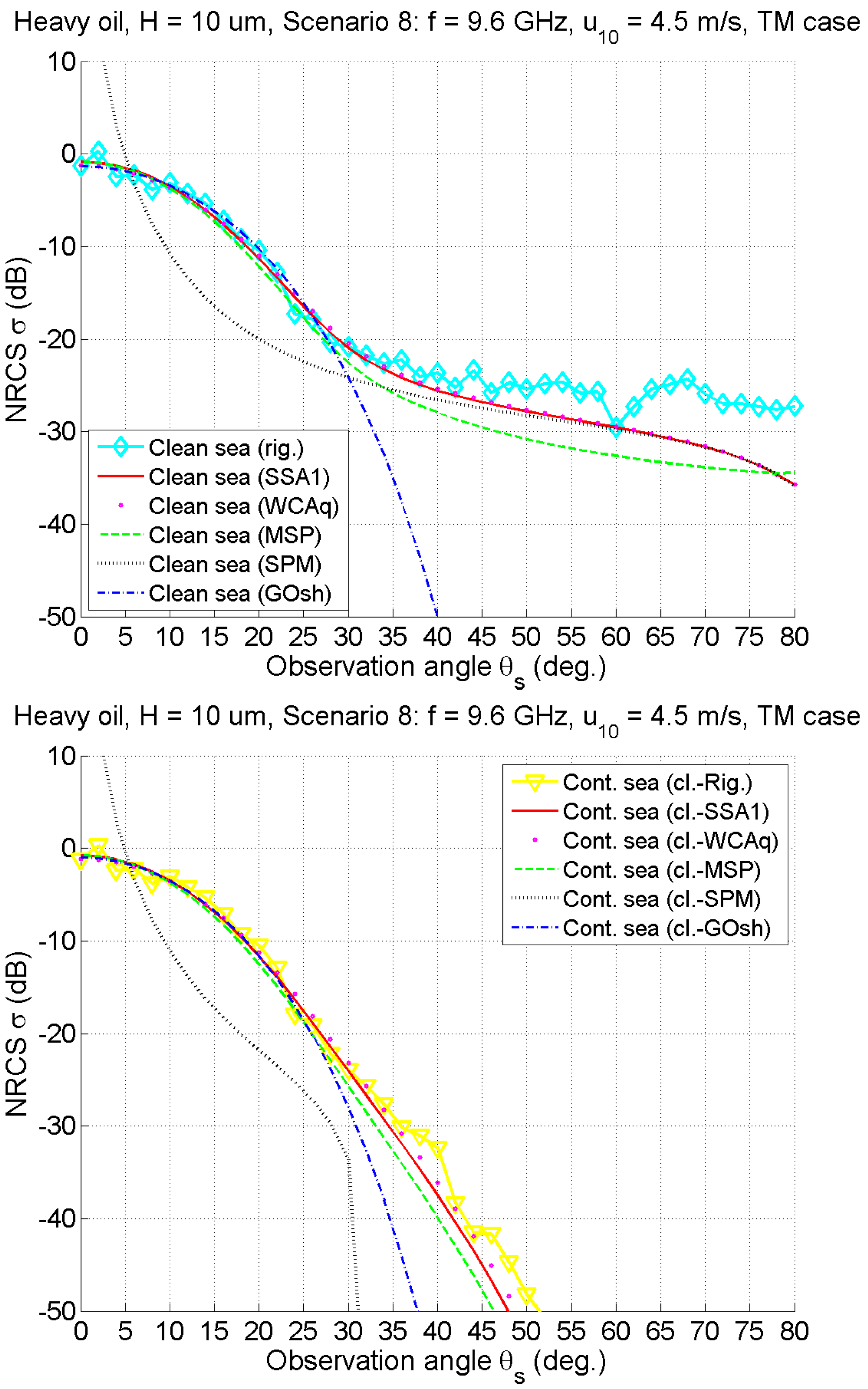
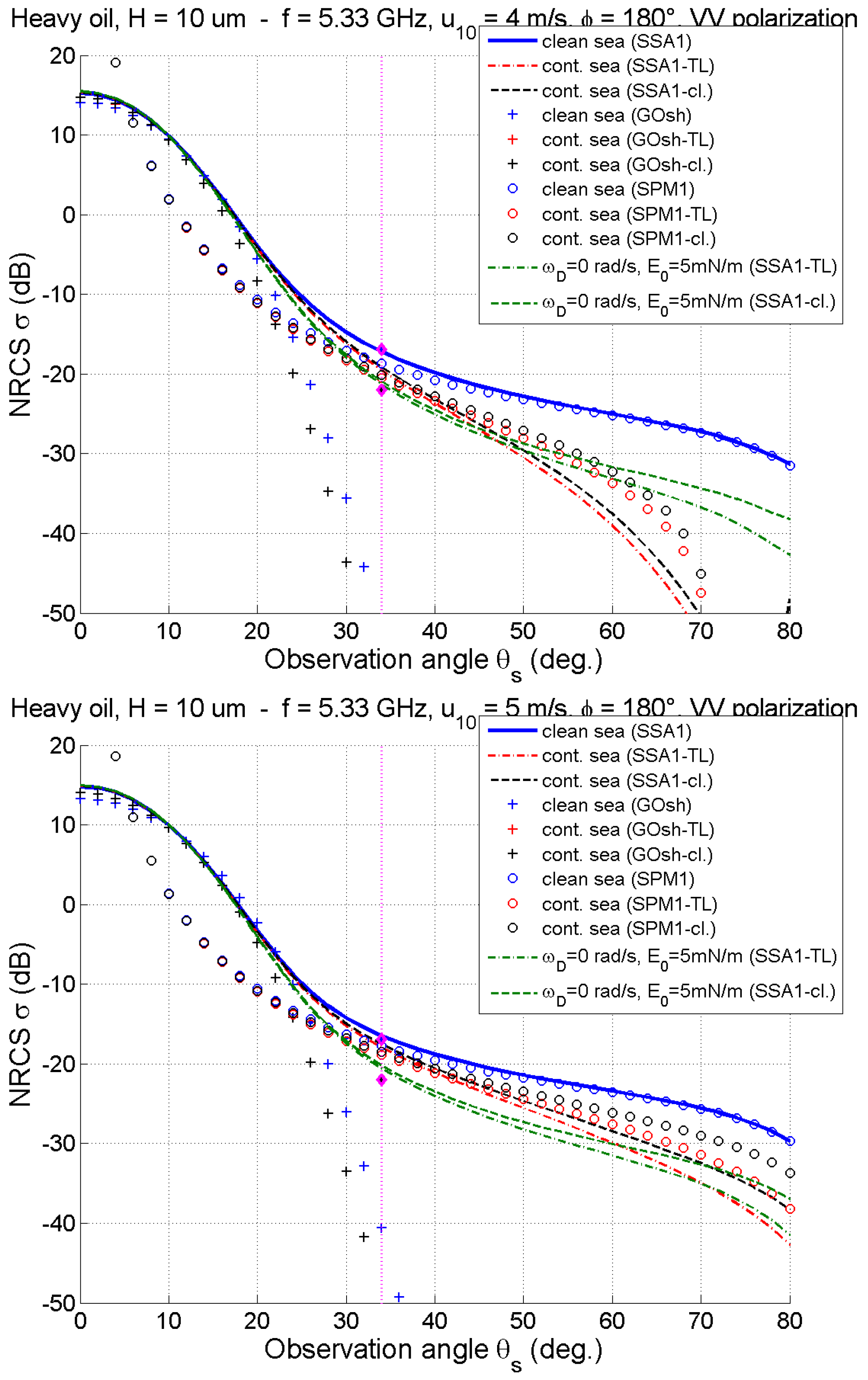
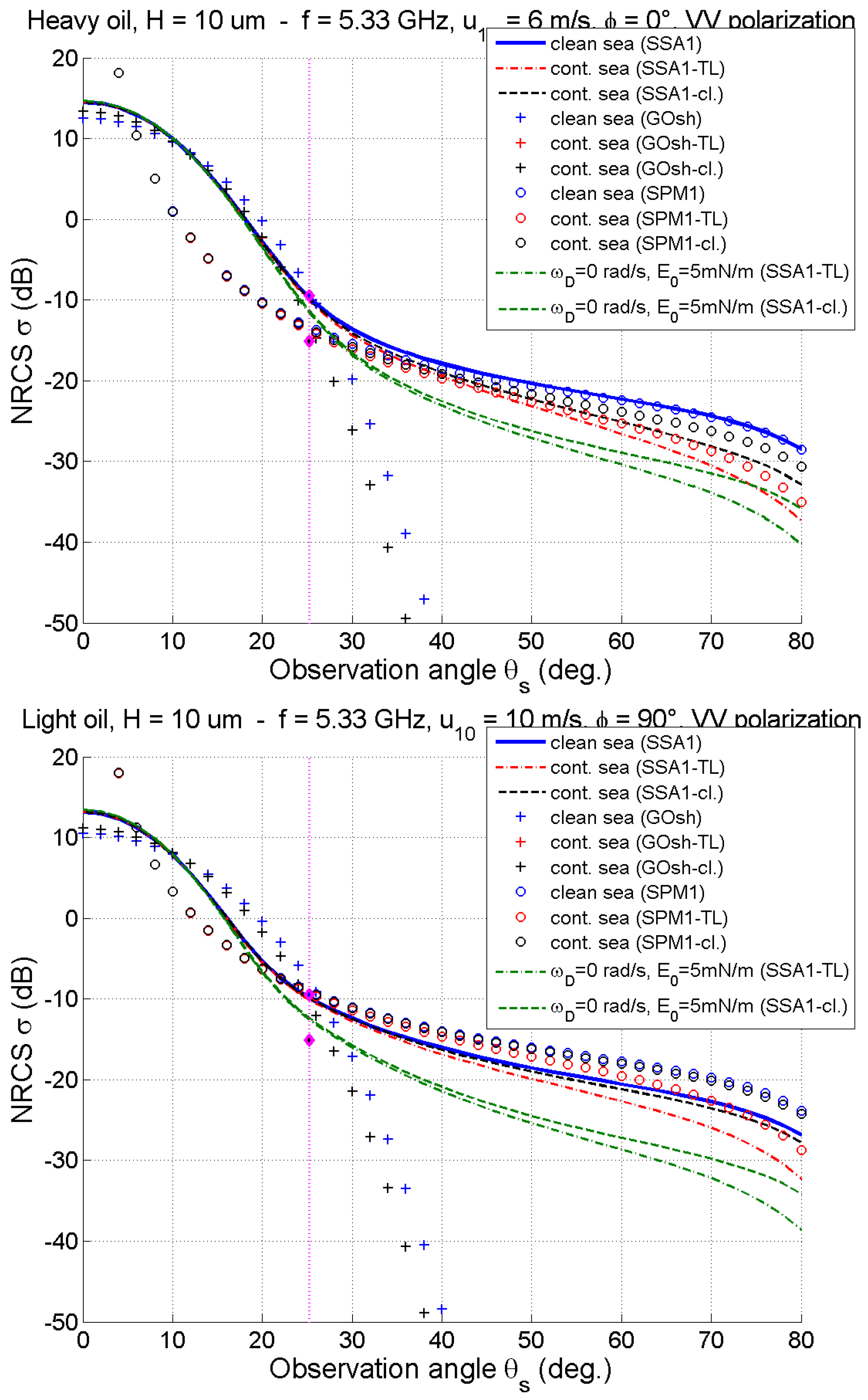
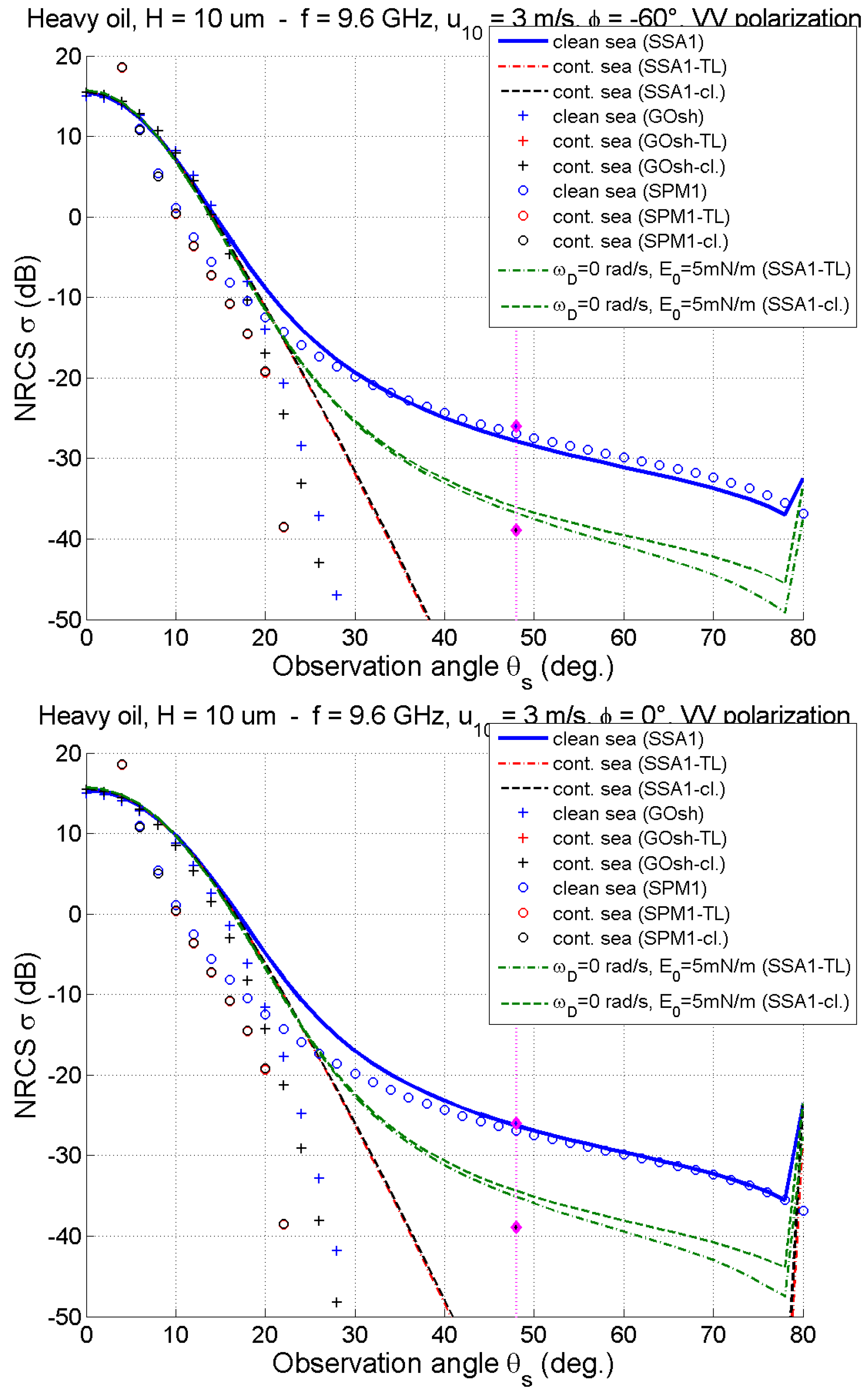
2D Validation of Common Asymptotic Models for Clean and Contaminated Seas
5. Results for a 3D Problem: Validation by Measurements
5.1. Comparisons with CSK Experiments (March 2011)
5.2. Comparisons with OOW NOFO Experiment (off Bergen, Finland, June 2011)
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| EM | Electromagnetic |
| GO | Geometric optical |
| GOsh | Geometric optical with shadowing effect |
| IFFT | Inverse Fast Fourier Transform |
| KA | Kirchhoff-tangent plane approximation |
| LCA | Local curvature approximation |
| MLB | Model of Local Balance |
| MoM | Method of moments |
| MSP | Method of stationary phase |
| NRCS | Normalized radar cross section |
| SPM | Small perturbation method |
| SSA1 | First-order small-slope approximation |
| TL | Thin-layer |
| TSM | Two-Scale Model |
| WCA | Weighted curvature approximation |
References
- Solberg, A.H.S.; Brekke, C.; Husoy, P.O. Oil Spill Detection in Radarsat and Envisat SAR Images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 746–755. [Google Scholar] [CrossRef]
- Derrode, S.; Mercier, G. Unsupervised multiscale oil slick segmentation from SAR images using a vector HMC model. Pattern Recognit. 2007, 40, 1135–1147. [Google Scholar] [CrossRef]
- Nunziata, F.; Gambardella, A.; Migliaccio, M. On the Mueller Scattering Matrix for SAR Sea Oil Slick Observation. IEEE Geosci. Remote Sens. Lett. 2008, 5, 691–695. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric Analysis of Backscatter From the Deepwater Horizon Oil Spill Using L-Band Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Lin, H. Oil-Spill Pollution Remote Sensing by Synthetic Aperture Radar. In Advanced Geoscience Remote Sensing; Marghany, M., Ed.; IntechOpen: Rijeka, Croatia, 2014; Chapter 2. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T.; Kudryavtsev, V. Comparing Near-Coincident C- and X-Band SAR Acquisitions of Marine Oil Spills. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1958–1975. [Google Scholar] [CrossRef]
- Fingas, M.; Fieldhouse, B. Formation of water-in-oil emulsions and application to oil spill modelling. J. Hazard. Mater. 2004, 107, 37–50. [Google Scholar] [CrossRef]
- Migliaccio, M.; Tranfaglia, M.; Ermakov, S. A physical approach for the observation of oil spills in SAR images. IEEE J. Ocean. Eng. 2005, 30, 28–39. [Google Scholar] [CrossRef]
- Fuks, I.; Zavorotny, V. Polarization dependence of radar contrast for sea surface oil slicks. In Proceedings of the IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007. [Google Scholar]
- Wu, Z.S.; Zhang, J.P.; Guo, L.X.; Zhou, P. An improved two-scale model with volume scattering for the dynamic ocean surface. Prog. Electromagn. Res. 2009, 89, 39–56. [Google Scholar] [CrossRef]
- Yang, P.; Guo, L. Polarimetric Doppler spectrum of backscattered echoes from nonlinear sea surface damped by natural slicks. J. Quant. Spectrosc. Radiat. Transf. 2016, 184, 193–204. [Google Scholar] [CrossRef]
- Panfilova, M.A.; Karaev, V.Y.; Guo, J. Oil Slick Observation at Low Incidence Angles in Ku-Band. J. Geophys. Res. Oceans 2018, 123, 1924–1936. [Google Scholar] [CrossRef]
- Pinel, N.; Déchamps, N.; Bourlier, C. Modeling of the Bistatic Electromagnetic Scattering From Sea Surfaces Covered in Oil for Microwave Applications. IEEE Trans. Geosci. Remote Sens. 2008, 46, 385–392. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. Oceans 1997, 102, 781–796. [Google Scholar] [CrossRef]
- Lombardini, P.; Fiscella, B.; Trivero, P.; Cappa, C.; Garrett, W. Modulation of the spectra of short gravity waves by sea surface films: Slick detection and characterization with a microwave probe. J. Atmos. Ocean. Technol. 1989, 6, 882–890. [Google Scholar] [CrossRef]
- Pinel, N.; Bourlier, C.; Sergievskaya, I. Two-dimensional radar backscattering modeling of oil slicks at sea based on the Model of Local Balance: Validation of two asymptotic techniques for thick films. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2326–2338. [Google Scholar] [CrossRef]
- Ermakov, S.; Salashin, S.; Panchenko, A. Film slicks on the sea surface and some mechanisms of their formation. Dyn. Atmos. Oceans 1992, 16, 279–304. [Google Scholar] [CrossRef]
- Pinel, N.; Bourlier, C.; Sergievskaya, I. Unpolarized emissivity of thin oil films over anisotropic Gaussian seas in infrared window regions. Appl. Opt. 2010, 49, 2116–2131. [Google Scholar] [CrossRef]
- Elfouhaily, T.M.; Guérin, C.A. A critical survey of approximate scattering wave theories from random rough surfaces. Waves Random Media 2004, 14, R1–R40. [Google Scholar] [CrossRef]
- Bourlier, C.; Pinel, N. Numerical implementation of local unified models for backscattering from random rough sea surfaces. Waves Random Complex Media 2009, 19, 455–479. [Google Scholar] [CrossRef]
- Bourlier, C. Upwind—Downwind Asymmetry of the Sea Backscattering Normalized Radar Cross Section Versus the Skewness Function. IEEE Trans. Geosci. Remote Sens. 2018, 56, 17–24. [Google Scholar] [CrossRef]
- Alpers, W.; Holt, B.; Zeng, K. Oil spill detection by imaging radars: Challenges and pitfalls. Remote Sens. Environ. 2017, 201, 133–147. [Google Scholar] [CrossRef]
- Kim, D.j.; Moon, W.; Kim, Y.S. Application of TerraSAR-X Data for Emergent Oil-Spill Monitoring. IEEE Trans. Geosci. Remote Sens. 2010, 48, 852–863. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Wang, Y.; Meng, J.; Zhang, X. The damping model for sea waves covered by oil films of a finite thickness. Acta Oceanol. Sin. 2015, 34, 71–77. [Google Scholar] [CrossRef]
- Montuori, A.; Nunziata, F.; Migliaccio, M.; Sobieski, P. X-Band Two-Scale Sea Surface Scattering Model to Predict the Contrast due to an Oil slick. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4970–4978. [Google Scholar] [CrossRef]
- Nunziata, F.; de Macedo, C.R.; Buono, A.; Velotto, D.; Migliaccio, M. On the analysis of a time series of X-band TerraSAR-X SAR imagery over oil seepages. Int. J. Remote Sens. 2019, 40, 3623–3646. [Google Scholar] [CrossRef]
- Jackson, C.R.; Apel, J.R. Synthetic Aperture Radar Marine User’s Manual; US Department of Commerce: Washington, DC, USA, 2004.
- Skrunes, S.; Brekke, C.; Eltoft, T. Oil spill characterization with multi-polarization C- and X-band SAR. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Lamkaouchi, K. Water: A Dielectric Standard. Permittivity of Water-Petrol Mixtures at Microwave Frequencies. Ph.D. Thesis, Bordeaux I University, Talance, France, 1992. (In French). [Google Scholar]
- Iodice, A. Forward-Backward method for scattering from dielectric rough surfaces. IEEE Trans. Antennas Propag. 2002, 50, 901–911. [Google Scholar] [CrossRef]
- Chou, H.T.; Johnson, J. A novel acceleration algorithm for the computation of scattering from rough surfaces with the Forward-Backward method. Radio Sci. 1998, 33, 1277–1287. [Google Scholar] [CrossRef]
- Déchamps, N.; de Beaucoudrey, N.; Bourlier, C.; Toutain, S. Fast numerical method for electromagnetic scattering by rough layered interfaces: Propagation-inside-layer expansion method. JOSA A 2006, 23, 359–369. [Google Scholar] [CrossRef]
- Cedre (Centre de Documentation, de Recherche et D’expérimentations sur les Pollutions Accidentelles des Eaux). RAPSODI (Remote Sensing Anti-Pollution System for geOgraphical Data Integration), Experimentation Report (D9); Technical Report; European Community: Maastricht, The Netherlands, 2001. [Google Scholar]
- Voronovich, A. Wave Scattering from Rough Surfaces, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Skrunes, S.; Brekke, C.; Eltoft, T. Characterization of Marine Surface Slicks by Radarsat-2 Multipolarization Features. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5302–5319. [Google Scholar] [CrossRef]
- Mouche, A.; Chapron, B.; Reul, N. A simplified asymptotic theory for ocean surface electromagnetic wave scattering. Waves Random Complex Media 2007, 17, 321–341. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, J.; Zhang, Y.; Khenchaf, A.; Wang, Y. Theoretical Study on Microwave Scattering Mechanisms of Sea Surfaces Covered with and without Oil Film for Incidence Angle Smaller Than 30°. IEEE Trans. Geosci. Remote Sens. 2021, 59, 37–46. [Google Scholar] [CrossRef]
- Jenkins, A.; Jacobs, S. Wave damping by a thin layer of viscous fluid. Phys. Fluids 1997, 9, 1256–1264. [Google Scholar] [CrossRef]
- Nouguier, F.; Guérin, C.A.; Chapron, B. Scattering From Nonlinear Gravity Waves: The “Choppy Wave” Model. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4184–4192. [Google Scholar] [CrossRef]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinel, N.; Bourlier, C.; Sergievskaya, I.; Longépé, N.; Hajduch, G. Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces. Remote Sens. 2022, 14, 981. https://doi.org/10.3390/rs14040981
Pinel N, Bourlier C, Sergievskaya I, Longépé N, Hajduch G. Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces. Remote Sensing. 2022; 14(4):981. https://doi.org/10.3390/rs14040981
Chicago/Turabian StylePinel, Nicolas, Christophe Bourlier, Irina Sergievskaya, Nicolas Longépé, and Guillaume Hajduch. 2022. "Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces" Remote Sensing 14, no. 4: 981. https://doi.org/10.3390/rs14040981
APA StylePinel, N., Bourlier, C., Sergievskaya, I., Longépé, N., & Hajduch, G. (2022). Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces. Remote Sensing, 14(4), 981. https://doi.org/10.3390/rs14040981