
Cramér-Rao Bound of Joint DOA-Range Estimation for Coprime Frequency Diverse Arrays



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- In an attempt to capture the amplitude fluctuation of a target signal return due to the temporal variations of radar cross-section (RCS), Swerling models were established. Swerling 0 model [39,40] is associated with non-fluctuating RCS, and the radar return of such a target type shows deterministic characteristics. For complex targets that have many small surfaces and joints with different orientations, a Swerling I target-type model [41] is used, and the corresponding receive signal is subject to a stochastic model. In this work, we investigate far-field target detection, and both deterministic and stochastic signal models are considered.
- CRB identifies the potential performance of a signal model with the variance lower bound of unbiased estimation. For DOA-range estimation, the prior information of the radar target makes an impact on the CRB result. In this work, this issue is described as separate parameter estimation, i.e., CRB of DOA (range) estimation while range (DOA) is known. The relation between CRB of separate parameter estimation and CRB of joint estimation is studied via Fisher information with respect to angle and range.
- Analytical form expressions are derived for the input signal-to-noise ratio (SNR) and CRBs of DOA and range. Accordingly, numerical simulations are presented to compare CRBs for deterministic and stochastic source cases, and separate parameter estimation and joint estimation models. According to the analyses of CRB results, an intuitive method for coprime FDA design is proposed based on CRB minimization.
2. Signal Model
2.1. Deterministic Signal Model
2.2. Stochastic Signal Model
3. CRB of Deterministic Signal for Coprime FDA
3.1. Deterministic Signal Model and CRB Derivation
3.2. CRB of Joint DOA-Range Estimation
3.3. CRB of Separate Estimation
4. CRB of Stochastic Signal for Coprime FDA
4.1. Stochastic Signal Model and CRB Derivation
4.2. CRB of Joint DOA-Range Estimation
4.3. CRB of Separate Estimation
5. Numerical Simulations and Analyses
- Deterministic () and stochastic () are independent of the range, meaning that the range of signal source has no influence on the CRB of range estimation from the premise that the path loss is not considered.
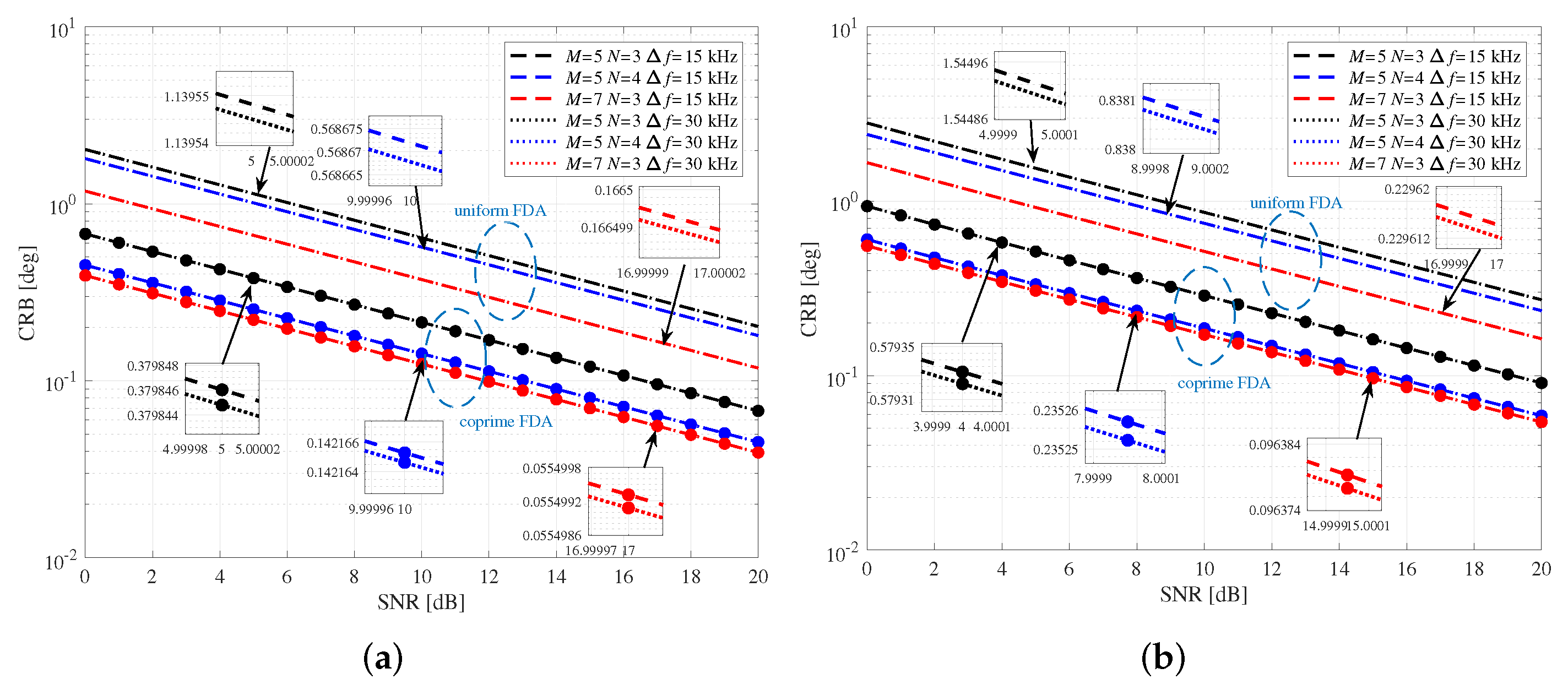
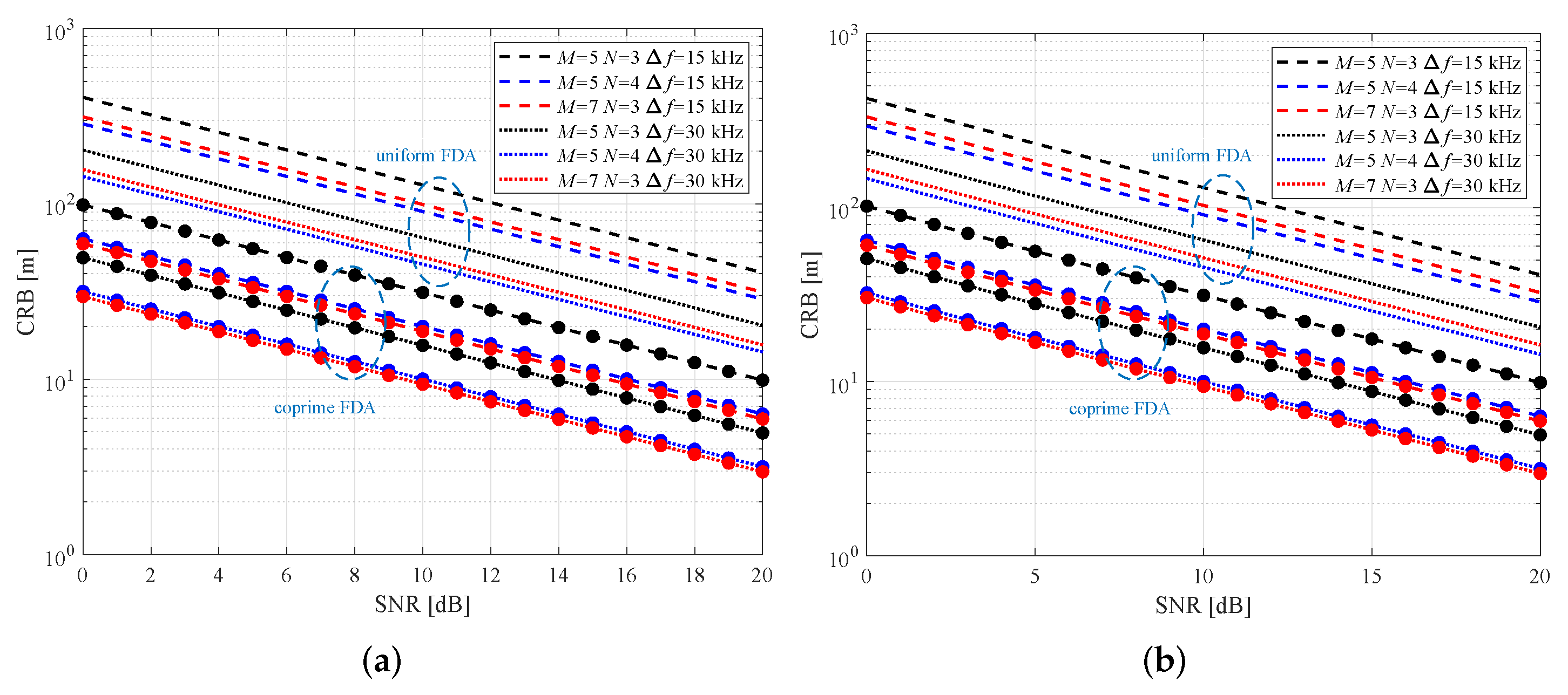
- Since a coprime FDA is narrow-band in nature, the frequency-increment-induced phase difference with respect to angle is much smaller than the array-spacing-induced one. As such, deterministic and stochastic are weakly dependent on the frequency increment (see Figure 2). This is, however, not the case for deterministic () and stochastic (). Furthermore, the range estimation performance improves with the increase of the frequency increment (see Figure 3).
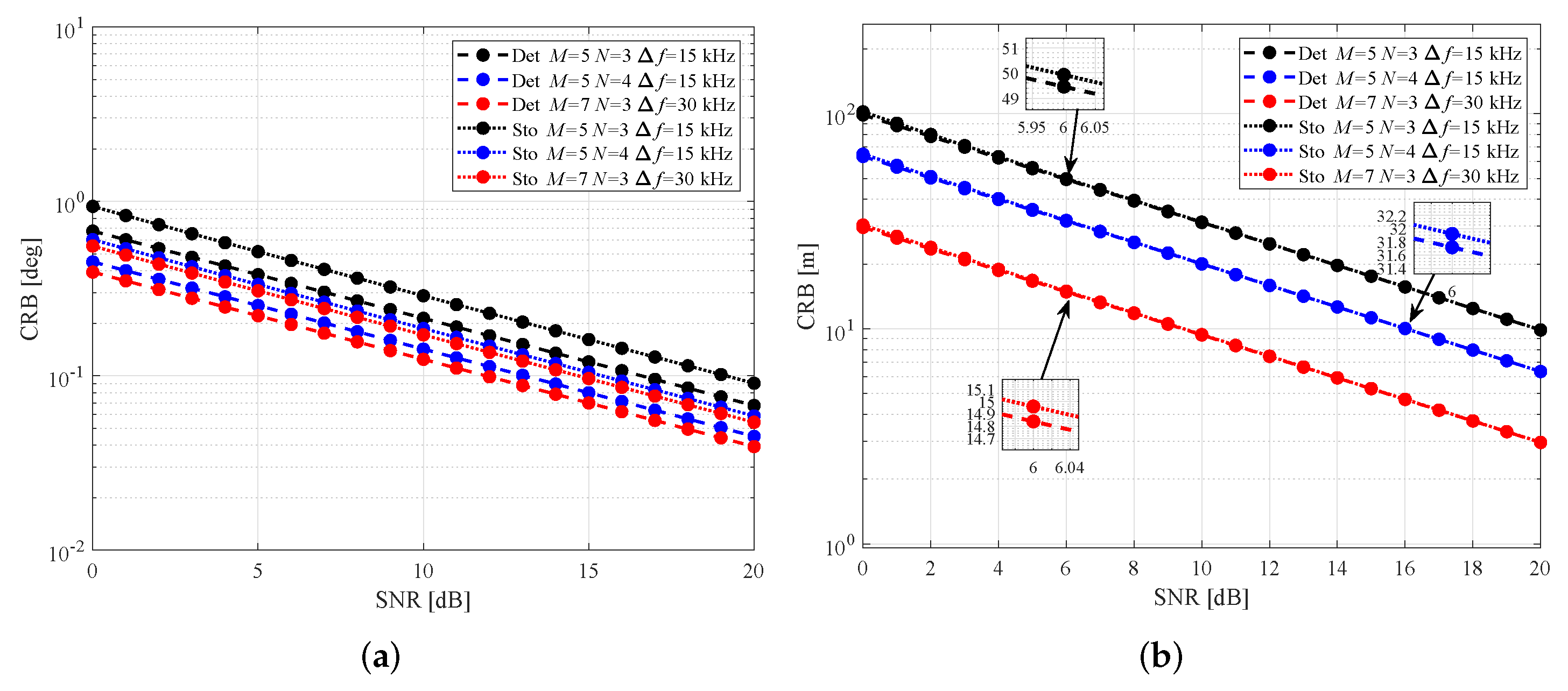
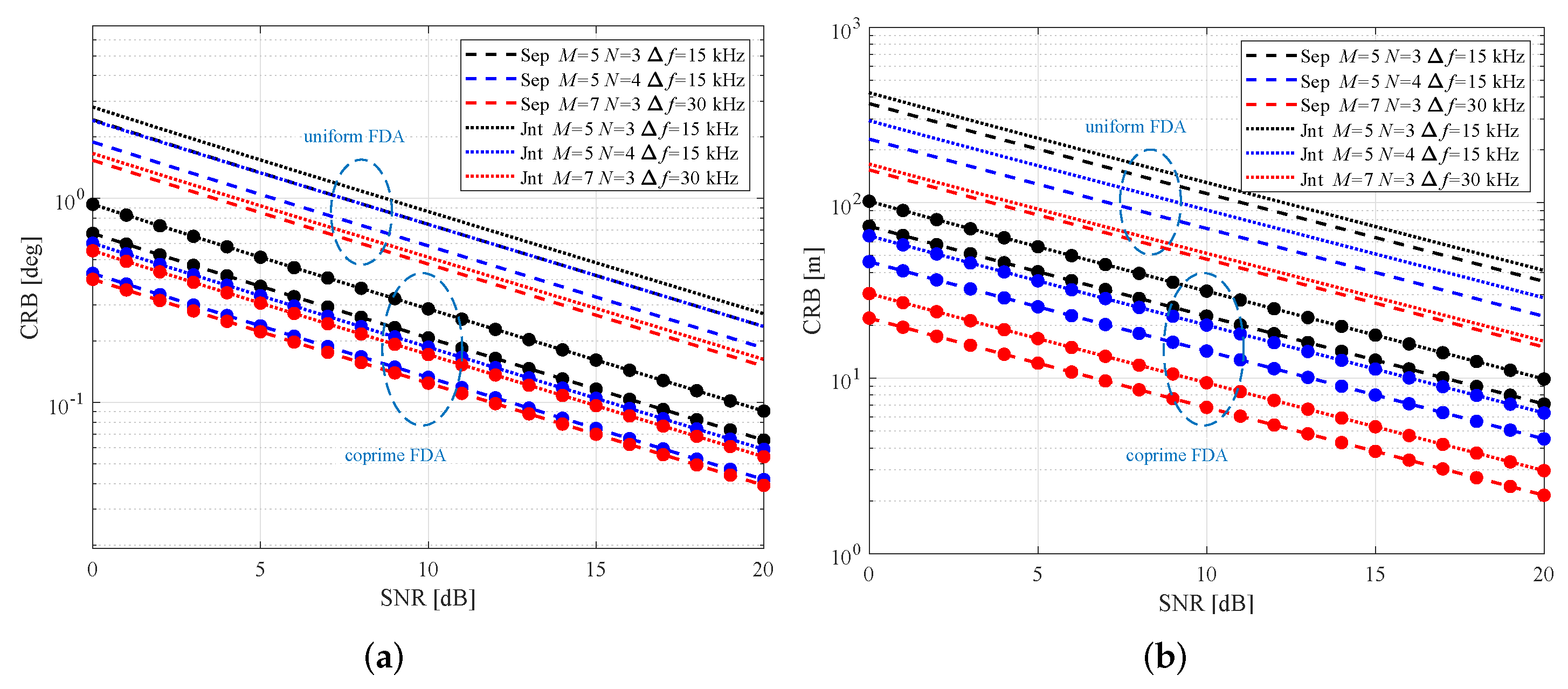
- Connecting to frequency increment has limited impact on the DOA estimation, and the dependence is not consistent in deterministic and stochastic CRBs for DOA estimation (see Figure 5). Connecting this phenomenon to the previous remark, the impact of on CRB for DOA estimation defies generalisations.
- For a sufficient number of sensors, deterministic , stochastic , deterministic and stochastic of coprime FDA are .
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Antonik, P.; Wicks, M.C.; Griffiths, H.D.; Baker, C.J. Range-dependent beamforming using element level waveform diversity. In Proceedings of the 2006 International Waveform Diversity & Design Conference, Las Vegas, NV, USA, 22–26 January 2006; pp. 140–144. [Google Scholar]
- Antonik, P.; Wicks, M.C.; Griffiths, H.D.; Baker, C.J. Frequency diverse array radars. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 215–217. [Google Scholar]
- Wang, W.-Q. Phased-MIMO radar with frequency diversity for range-dependent beamforming. IEEE Sens. J. 2013, 13, 1320–1328. [Google Scholar] [CrossRef]
- Sammartino, P.F.; Baker, C.J.; Griffiths, H.D. Frequency diverse MIMO techniques for radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1320–1328. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, W.; Zheng, Z. Frequency diverse array beampattern synthesis using symmetrical logarithmic frequency offsets for target indication. IEEE Trans. Antennas Propag. 2019, 67, 3505–3509. [Google Scholar] [CrossRef]
- Wang, C.; Xu, J.; Liao, G.; Xu, X.; Zhang, Y. A range ambiguity resolution approach for high-resolution and wide-swath SAR imaging using frequency diverse array. IEEE J. Sel. Top. Signal Process. 2017, 11, 336–346. [Google Scholar] [CrossRef]
- Lan, L.; Liao, G.; Xu, J.; Zhang, Y.; Liao, B. Transceive beamforming with accurate nulling in FDA-MIMO radar for imaging. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4145–4159. [Google Scholar] [CrossRef]
- Nusenu, S.Y.; Wang, W.-Q. Range-dependent spatial modulation using frequency diverse array for OFDM wireless communications. IEEE Trans. Veh. Technol. 2018, 67, 10886–10895. [Google Scholar] [CrossRef]
- Wang, W.-Q. Range-angle dependent transmit beampattern synthesis for linear frequency diverse arrays. IEEE Trans. Antennas Propag. 2013, 61, 4073–4081. [Google Scholar] [CrossRef]
- Secmen, M.; Demir, S.; Hizal, A.; Eker, T. Frequency diverse array antenna with periodic time modulated pattern in range and angle. In Proceedings of the 2007 IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007; pp. 427–430. [Google Scholar]
- Huang, S.; Tong, K.F.; Baker, C.J. Frequency diverse array: Simulation and design. In Proceedings of the 2009 Loughborough Antennas & Propagation Conference, Loughborough, UK, 16–17 November 2009; pp. 253–256. [Google Scholar]
- Khan, W.; Qureshi, I.M. Frequency diverse array radar with time-dependent frequency offset. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 758–761. [Google Scholar] [CrossRef]
- Khan, W.; Qureshi, I.M.; Saeed, S. Frequency diverse array radar with logarithmically increasing frequency offset. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 499–502. [Google Scholar] [CrossRef]
- Mahmood, M.; Mir, H. Frequency diverse array beamforming using nonuniform logarithmic frequency increments. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1817–1821. [Google Scholar] [CrossRef]
- Liu, Y.; Ruan, H.; Wang, L.; Nehorai, A. The random frequency diverse array: A new antenna structure for uncoupled direction-range indication in active sensing. IEEE J. Sel. Top. Signal Process. 2017, 11, 295–308. [Google Scholar] [CrossRef]
- Wang, W.-Q.; So, H.C.; Shao, H. Nonuniform frequency diverse array for range-angle imaging of targets. IEEE Sens. J. 2014, 14, 2469–2476. [Google Scholar] [CrossRef]
- Shao, H.; Li, J.; Chen, H.; Wang, W.-Q. Adaptive frequency offset selection in frequency diverse array radar. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 1405–1408. [Google Scholar] [CrossRef]
- Gao, K.; Wang, W.; Chen, H.; Cai, J. Transmit beamspace design for multi-carrier frequency diverse array sensor. IEEE Sens. J. 2016, 16, 5709–5714. [Google Scholar] [CrossRef]
- Shao, H.; Dai, J.; Xiong, J.; Chen, H.; Wang, W.-Q. Dot-shaped range-angle beampattern synthesis for frequency diverse array. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1703–1706. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.-Q.; Chen, H.; Shao, H. Optimal frequency diverse subarray design with Cramér-Rao lower bound minimization. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1188–1191. [Google Scholar] [CrossRef]
- Xiong, J.; Wang, W.-Q.; Shao, H.; Chen, H. Frequency diverse array transmit beampattern optimization with genetic algorithm. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 469–472. [Google Scholar] [CrossRef]
- Yang, Y.-Q.; Wang, H.-Q.; Wang, H.; Gu, S.-Q.; Xu, D.-L.; Quan, S.-L. Optimization of sparse frequency diverse array with time-invariant spatial-focusing beampattern. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 351–354. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Zhu, S.; Huang, L.; So, H.C. Joint range and angle estimation using MIMO radar with frequency diverse array. IEEE Trans. Signal Process. 2015, 63, 3396–3410. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, G.; Li, W. Transmit beampattern design in range and angle domains for MIMO frequency diverse array radar. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 1003–1006. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- BouDaher, E.; Jia, Y.; Ahmad, F.; Amin, M.G. Multi-frequency co-prime arrays for high-resolution direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 3797–3808. [Google Scholar] [CrossRef]
- Zheng, H.; Shi, Z.; Zhou, C.; Haardt, M.; Chen, J. Coupled coarray tensor CPD for DOA estimation with coprime L-shaped array. IEEE Signal Process. Lett. 2021, 28, 1545–1549. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G.; Gini, F. Frequency diverse coprime arrays with coprime frequency offsets for multitarget localization. IEEE J. Sel. Top. Signal Process. 2017, 11, 321–335. [Google Scholar] [CrossRef]
- Ahmed, A.; Zhang, Y.D. Generalized non-redundant sparse array designs. IEEE Trans. Signal Process. 2021, 69, 4580–4594. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2018, 67, 1099–1122. [Google Scholar] [CrossRef]
- Wang, W.-Q. Information geometry resolution optimization for frequency diverse array in DOA estimation. Digit. Signal Process. 2019, 44, 58–67. [Google Scholar] [CrossRef]
- Liu, C.; Vaidyanathan, P.P. Cramér-Rao bounds for coprime and other sparse arrays, which find more sources than sensors. Digit. Signal Process. 2017, 61, 43–61. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Wang, W.-Q.; Wang, Z. Optimization of frequency increments via CRLB minimization for frequency diverse array. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 645–650. [Google Scholar]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood and Cramer-Rao bound. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, New York, NY, USA, 11–14 April 1988; pp. 2296–2299. [Google Scholar]
- Zhou, C.; Gu, Y.; Fan, X.; Shi, Z.; Mao, G.; Zhang, Y.D. Direction-of-arrival estimation for coprime array via virtual array interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Shi, Z.; Zhang, Y.D. Off-grid direction-of-arrival estimation using coprime array interpolation. IEEE Signal Process. Lett. 2018, 25, 1710–1714. [Google Scholar] [CrossRef]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Jiang, H.; Yi, W.; Kirubarajan, T.; Kong, L.; Yang, X. Multiframe radar detection of fluctuating targets using phase information. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 736–749. [Google Scholar] [CrossRef]
- Kay, S. Waveform design for multistatic radar detection. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1153–1166. [Google Scholar] [CrossRef]
- Stoica, P.; Larsson, E.G.; Gershman, A.B. The stochastic CRB for array processing: A textbook derivation. IEEE Signal Process. Lett. 2001, 8, 148–150. [Google Scholar] [CrossRef]
- Korso, M.N.E.; Boyer, R.; Renaux, A.; Marcos, S. Conditional and unconditional Cramér-Rao bounds for near-field source localization. IEEE Trans. Signal Process. 2010, 58, 2901–2907. [Google Scholar] [CrossRef]
- Lebrun, J.; Comon, P. An algebraic approach to blind identification of communication channels. In Proceedings of the International Symposium on Signal Processing and Its Applications, Paris, France, 26 July 2003; pp. 665–668. [Google Scholar]
- Trees, H.V. Detection, Estimation, and Modulation Theory, Optimum Array Processing; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Kumar, L.; Hegde, R.M. Stochastic Cramér-Rao bound analysis for DOA estimation in spherical harmonics domain. IEEE Signal Process. Lett. 2015, 22, 1030–1034. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S.; Haimovich, A.M. Noncoherent MIMO radar for location and velocity estimation: More antennas means better performance. IEEE Trans. Signal Process. 2010, 58, 3661–3680. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. The significant gains from optimally processed multiple signals of opportunity and multiple receive stations in passive radar. IEEE Signal Process. Lett. 2014, 21, 180–184. [Google Scholar] [CrossRef]
- Cong, J.; Wang, X.; Huang, M.; Bi, G. Feasible sparse spectrum fitting of DOA and range estimation for collocated FDA-MIMO radars. In Proceedings of the 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 8–11 June 2020; pp. 1–5. [Google Scholar]
- Xie, R.; Hu, D.; Luo, K.; Jiang, T. Performance analysis of joint range-velocity estimator with 2D-MUSIC in OFDM radar. IEEE Trans. Signal Process. 2021, 69, 4787–4800. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, Y.D.; Goodman, N.A. Optimized compressive sensing-based direction-of-arrival estimation in massive MIMO. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 20–25 March 2016; pp. 3181–3185. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Z.; Liu, S.; Qin, S.; Huang, Y. Cramér-Rao Bound of Joint DOA-Range Estimation for Coprime Frequency Diverse Arrays. Remote Sens. 2022, 14, 583. https://doi.org/10.3390/rs14030583
Mao Z, Liu S, Qin S, Huang Y. Cramér-Rao Bound of Joint DOA-Range Estimation for Coprime Frequency Diverse Arrays. Remote Sensing. 2022; 14(3):583. https://doi.org/10.3390/rs14030583
Chicago/Turabian StyleMao, Zihuan, Shengheng Liu, Si Qin, and Yongming Huang. 2022. "Cramér-Rao Bound of Joint DOA-Range Estimation for Coprime Frequency Diverse Arrays" Remote Sensing 14, no. 3: 583. https://doi.org/10.3390/rs14030583
APA StyleMao, Z., Liu, S., Qin, S., & Huang, Y. (2022). Cramér-Rao Bound of Joint DOA-Range Estimation for Coprime Frequency Diverse Arrays. Remote Sensing, 14(3), 583. https://doi.org/10.3390/rs14030583