
Remote Sensing of Wave Overtopping on Dynamic Coastal Structures

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
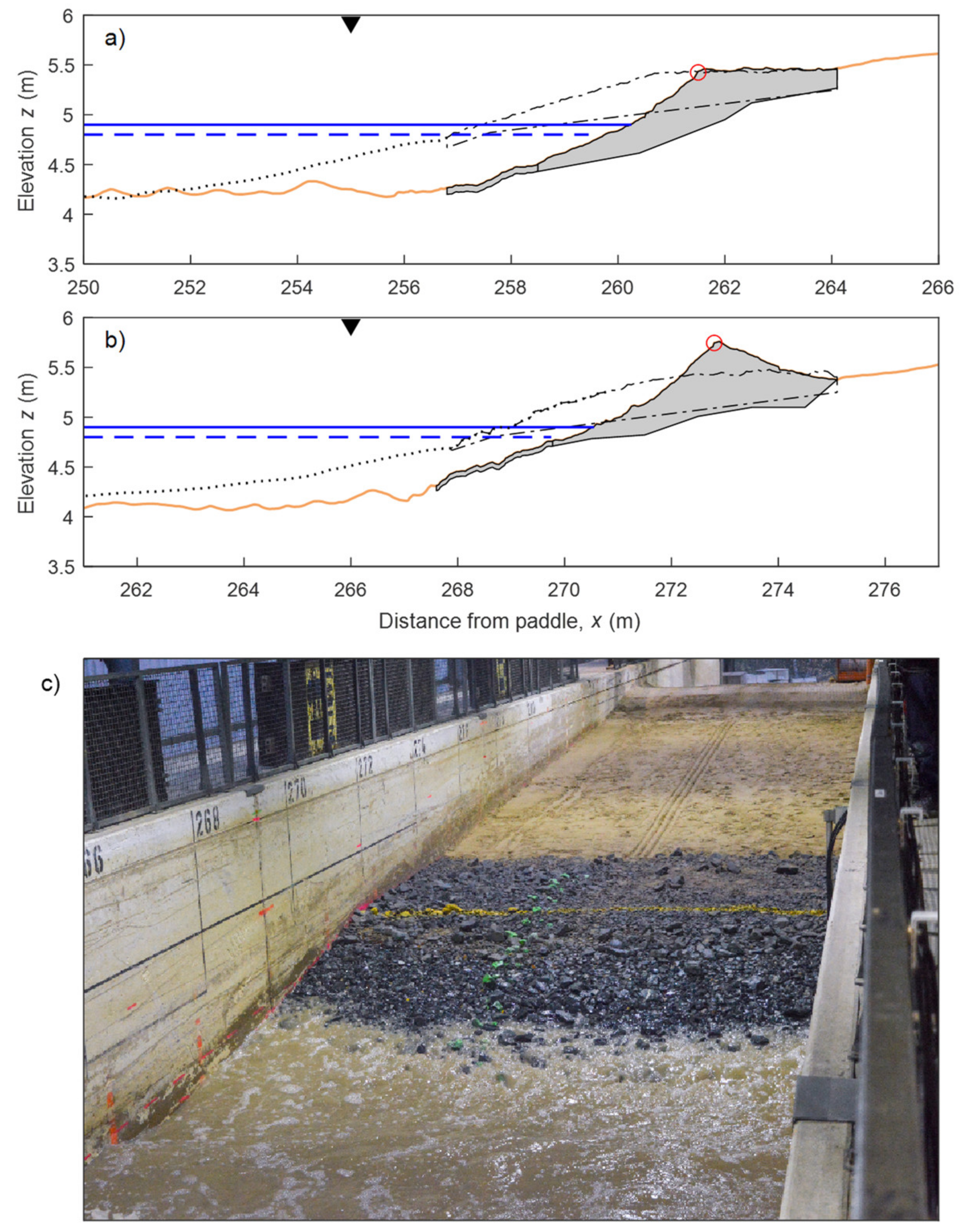
2.1. Experimental Setup
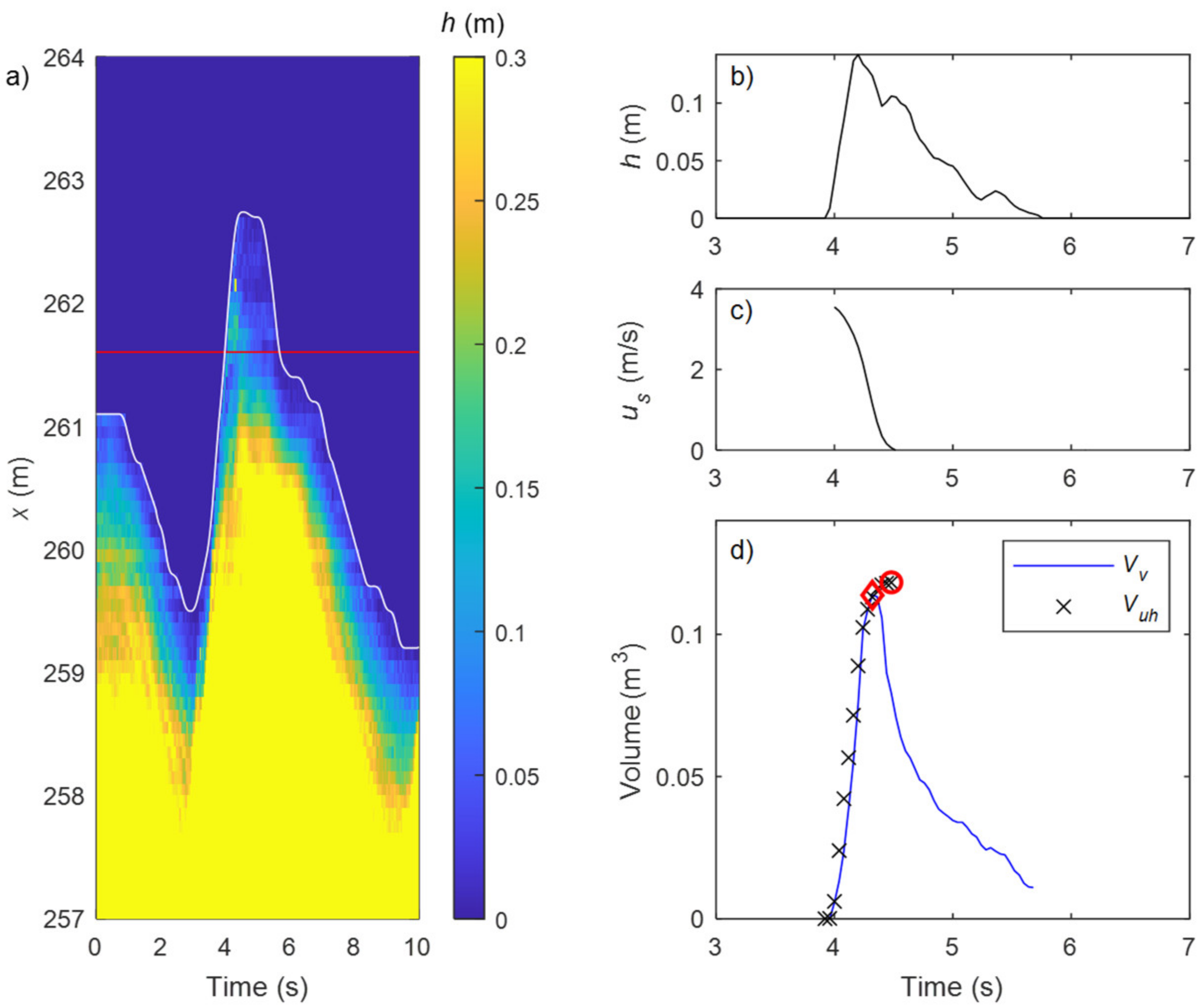
2.2. Lidar Measurements of Wave Overtopping
- An air void fraction α = 0 is assumed, however for violent overtopping flows on an irregular stone surface this is unlikely to be the case and will lead to an overestimate of overtopping volume. Indeed, very rapid overtopping flows were occasionally observed to “jump” as they passed over the revetment crest during 2DR leading to a short-lived air cavity beneath the overtopping flow. This effect led to anomalously large maxima in the depth timeseries during initial overtopping which were removed by discounting volume peaks during the first 0.25 s of these events.
- Infiltration into the porous revetment structure will mean that the estimated peak swash volume is smaller than the total amount of water that overtopped the crest. However, from an engineering perspective, the volumes presented here represent the flow volume actually present landward of the structure crest that could lead to safety concerns or inundation risk.
- As with the peak volume method, an air void fraction α = 0 is assumed, however for violent overtopping flows on an irregular stone surface this is unlikely to be the case. The presence of air voids will increase hc and lead to an overestimate of overtopping volume. Note that the flow “jumps” described above occur landward of the structure crest and so the large depths associated with this effect were not measured at the crest location.
- The flow depth at the structure crest was sometimes observed to be noisy during energetic overtopping events due to splashing, potentially leading to overestimates of the depth and hence overtopping volume. The depth data was despiked to remove short-lived depth maxima in order to minimise this effect.
- The shoreline velocity us is assumed to be representative of the depth-averaged flow velocity at the barrier crest uc. Schüttrumpf and Oumeraci [27] demonstrated that bore front velocity compared well with flow velocity measurements (micro-propeller) for waves overtopping an impermeable sea dike in the laboratory. In the current experiment, the irregular and porous nature of the structure may be expected to lead to enhanced deceleration of the swash front after overtopping. As a result, us is expected to provide a reasonable estimate of uc during the initial stages of overtopping but underestimate uc as flow reversal is approached.
3. Results
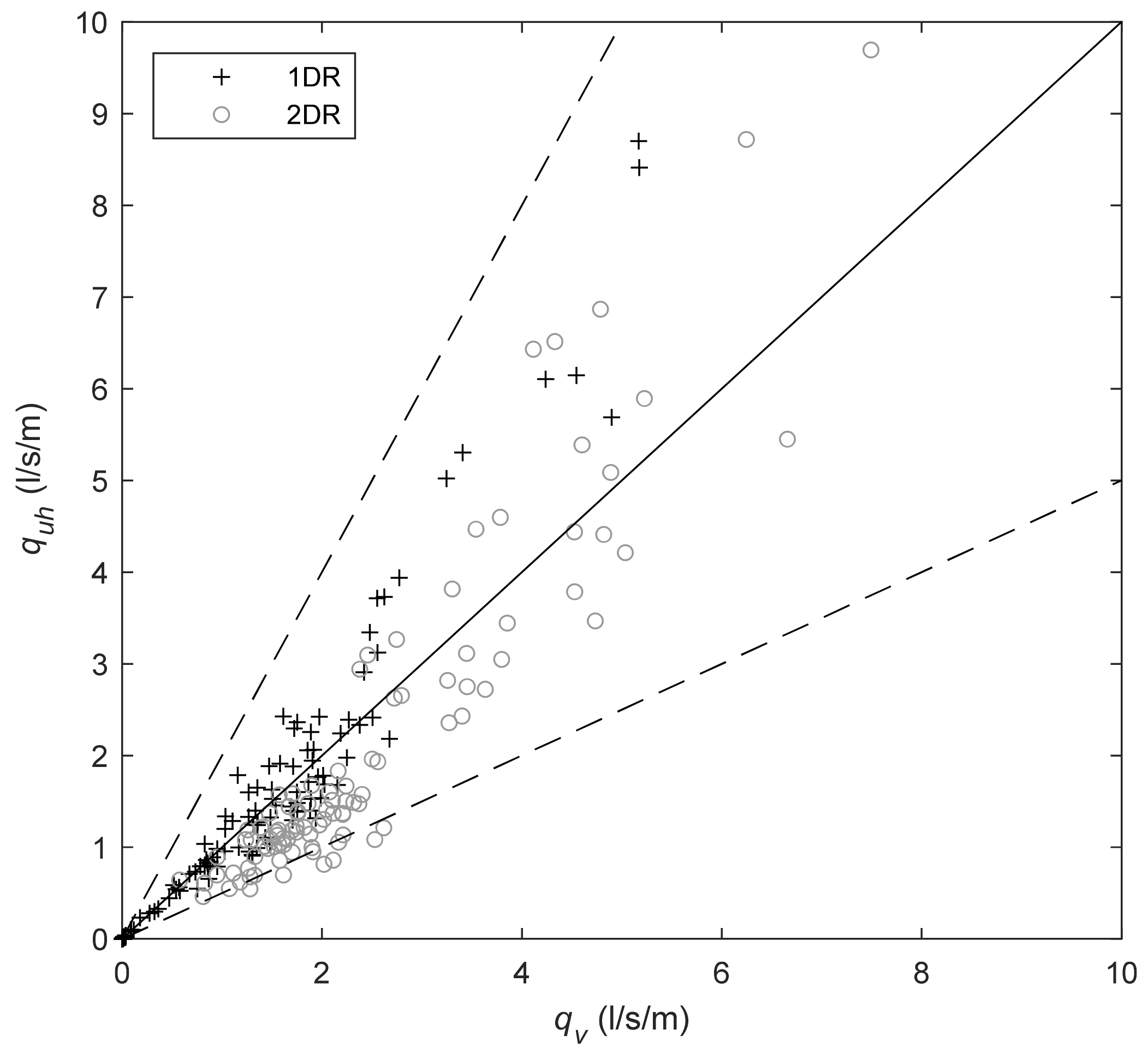
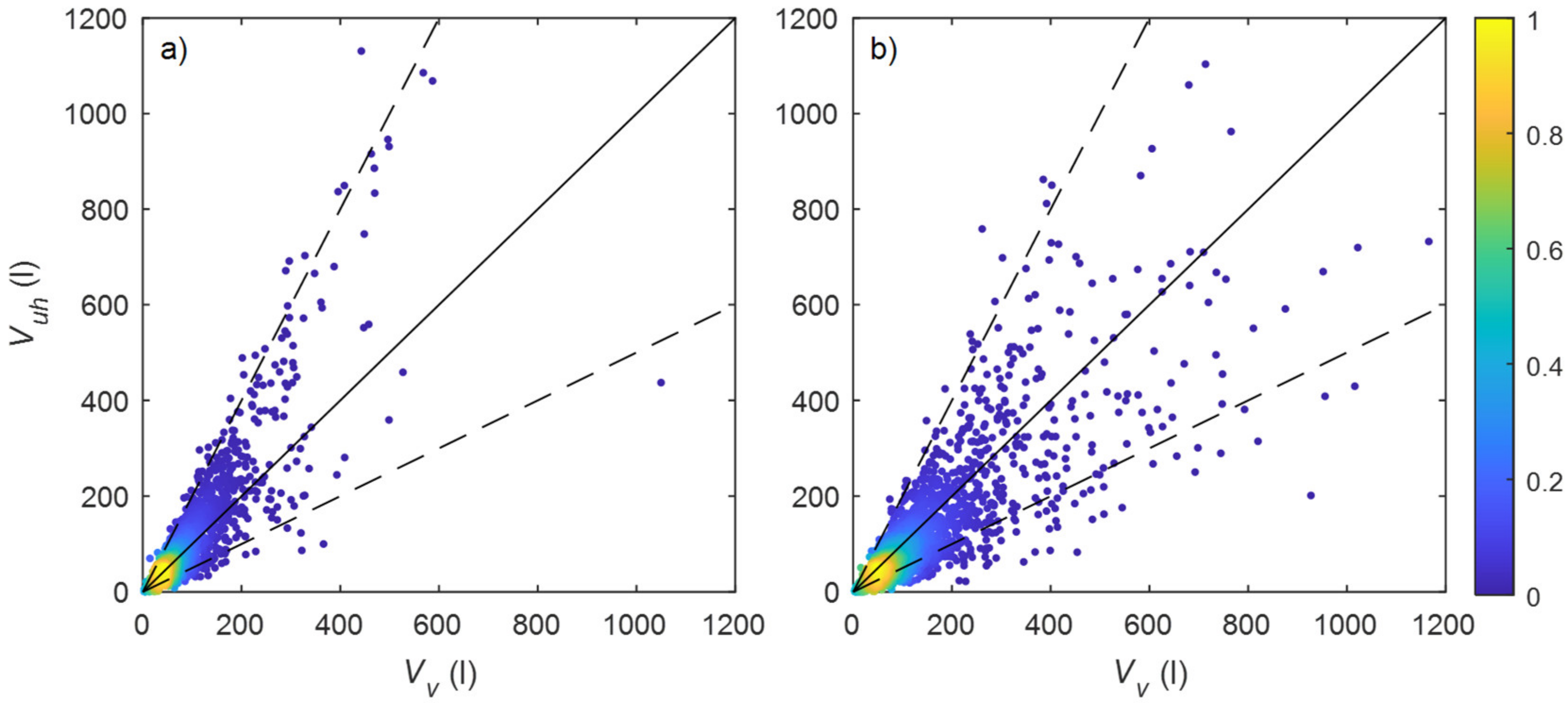
3.1. Comparison of Overtopping Measurement Methods
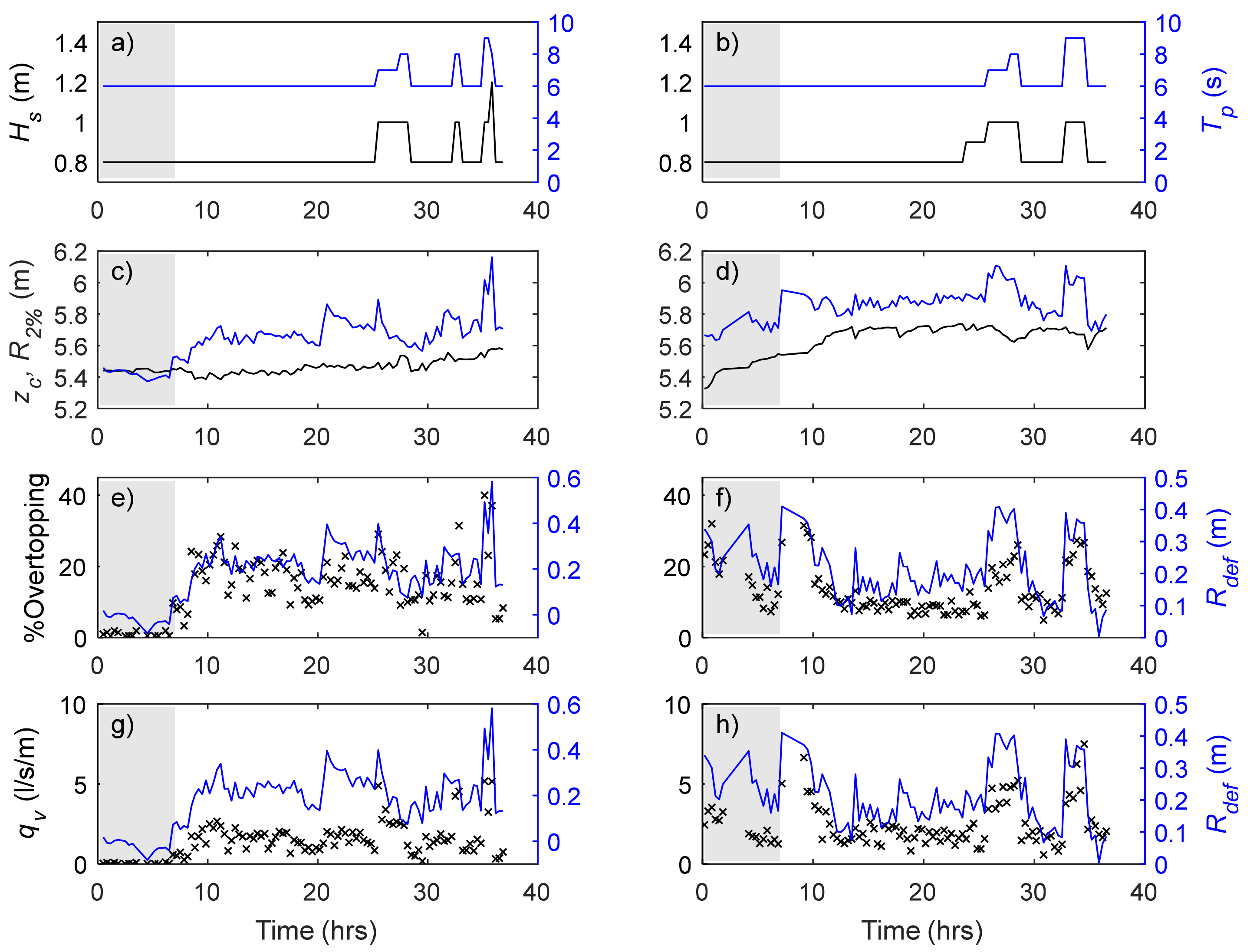
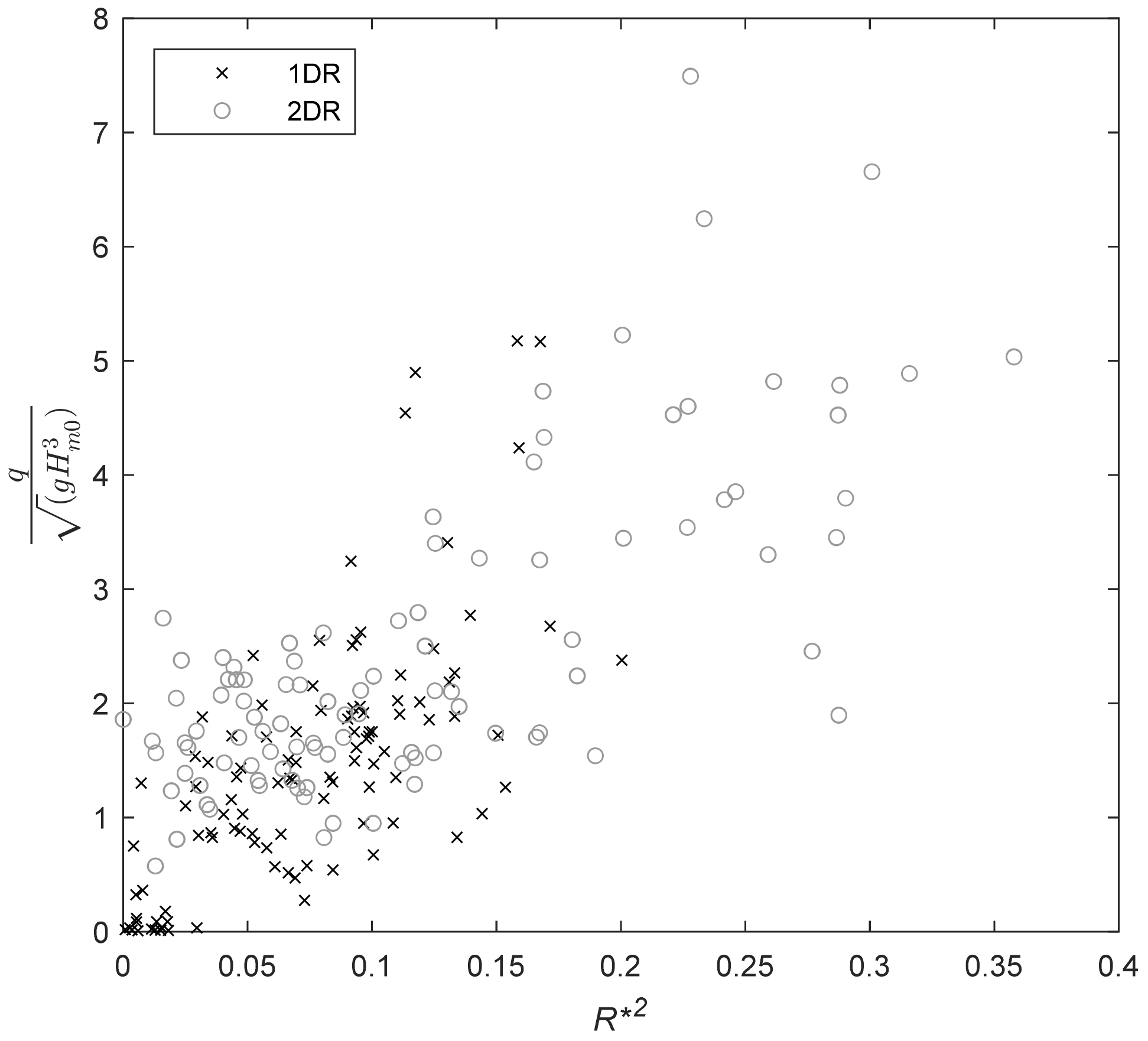
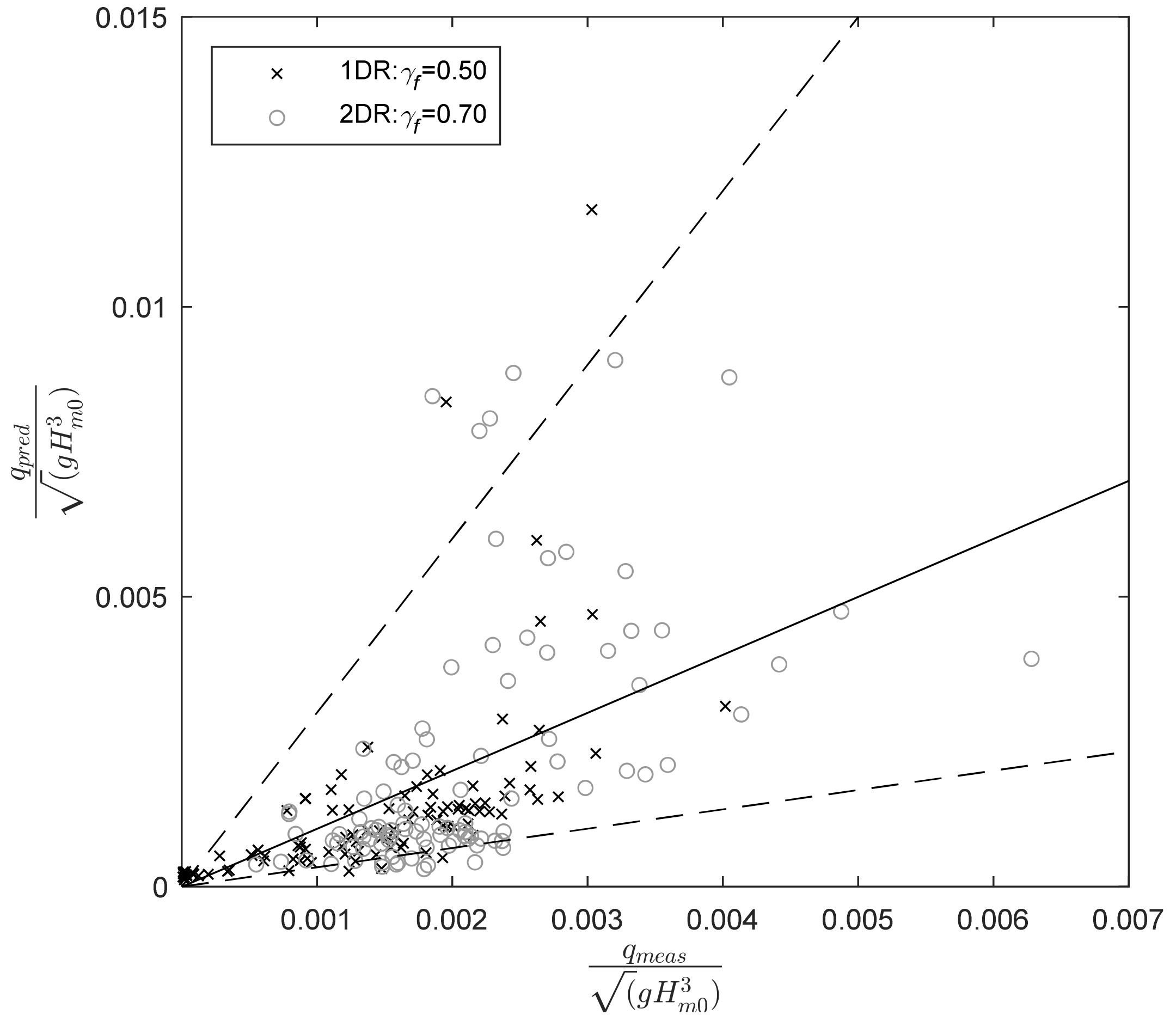
3.2. Overtopping Discharge at the Revetment Crest
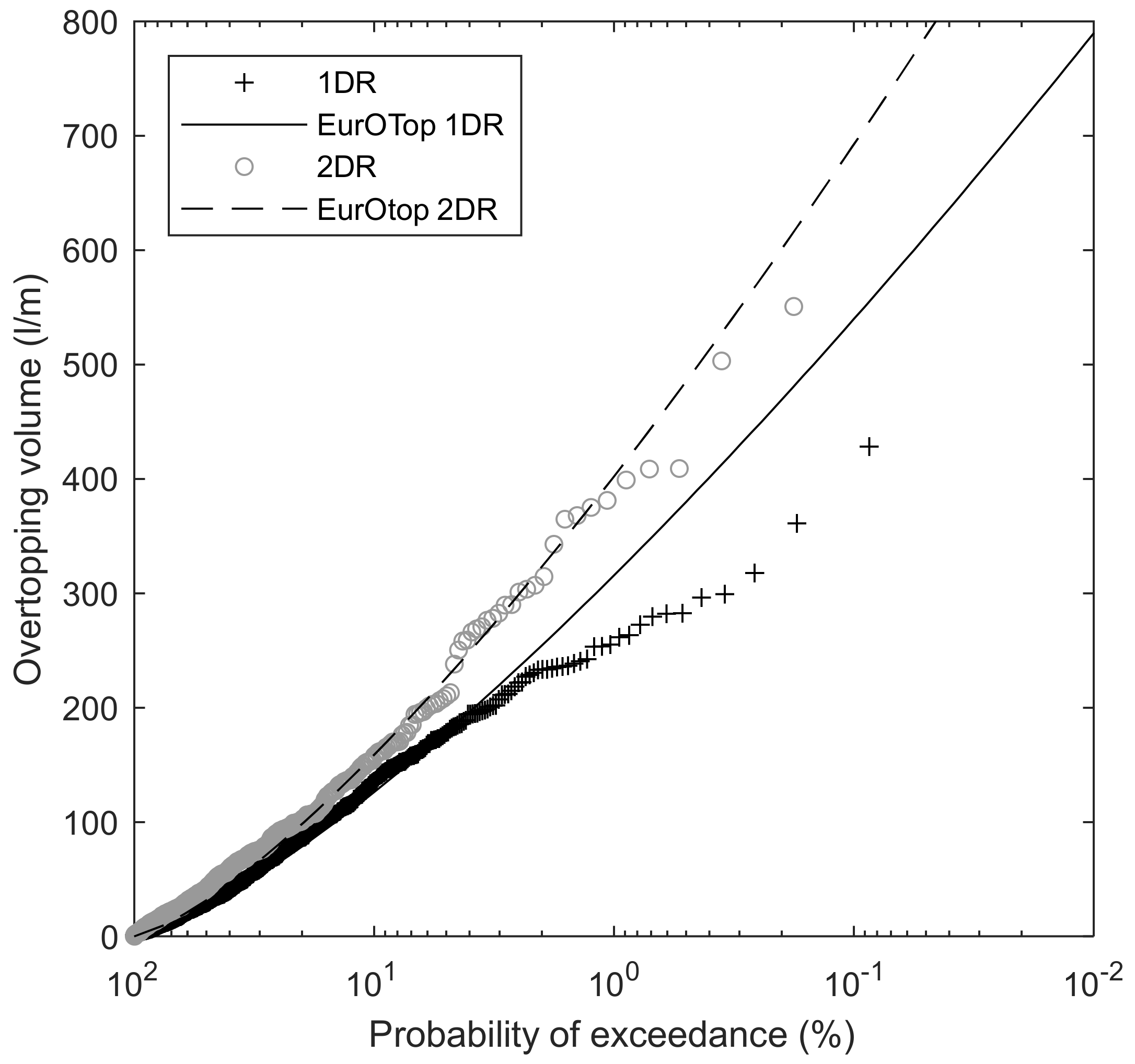
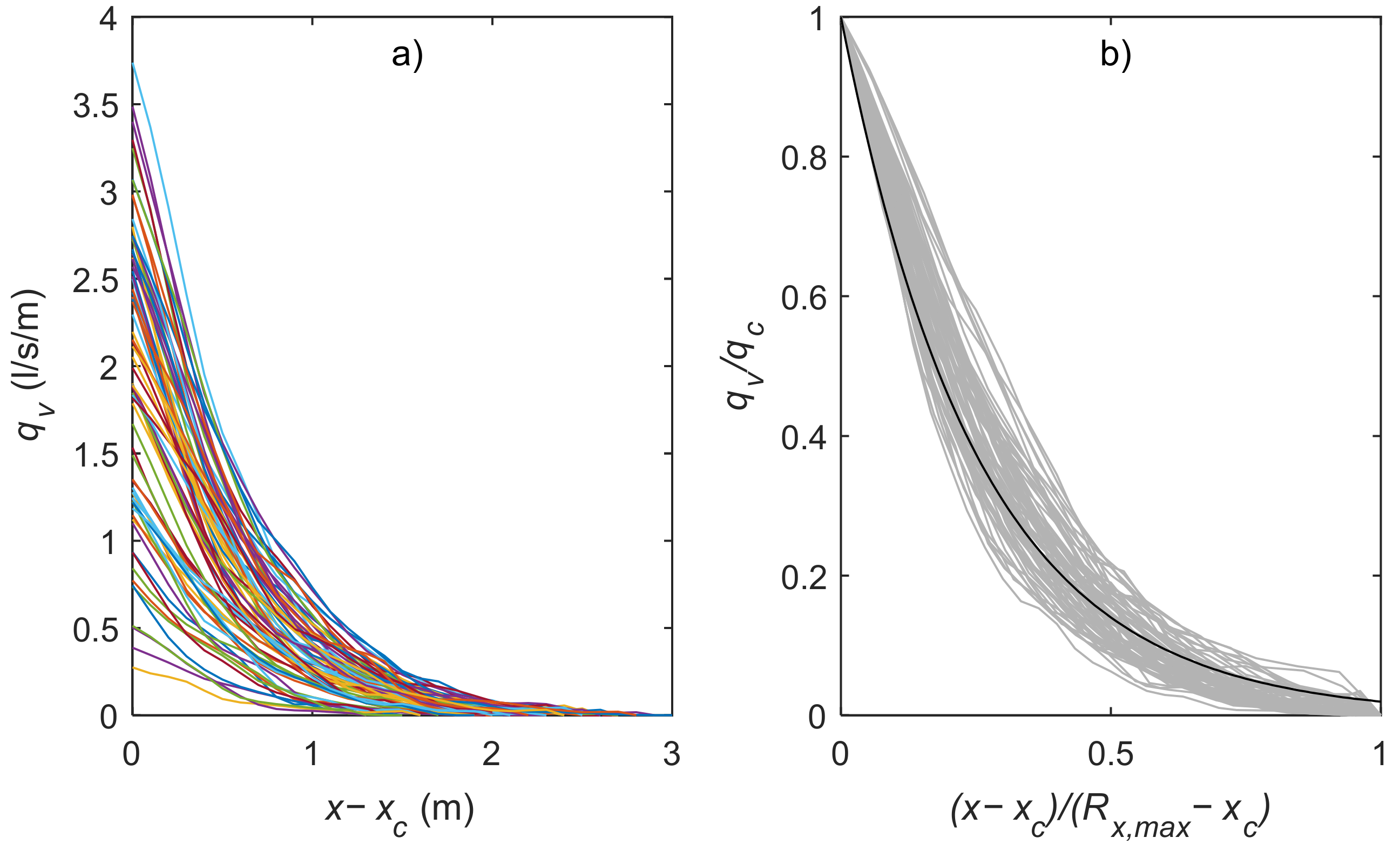
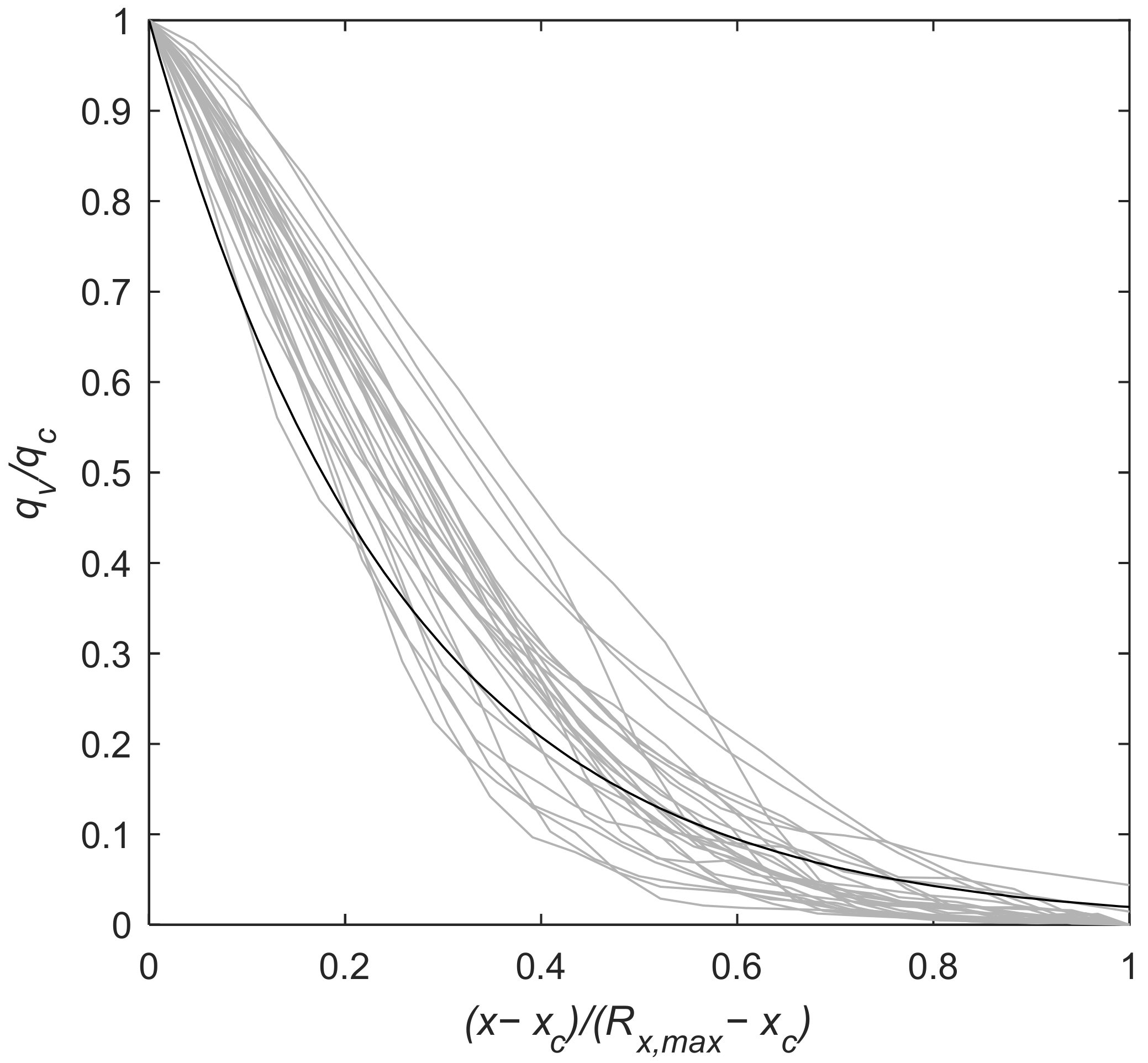
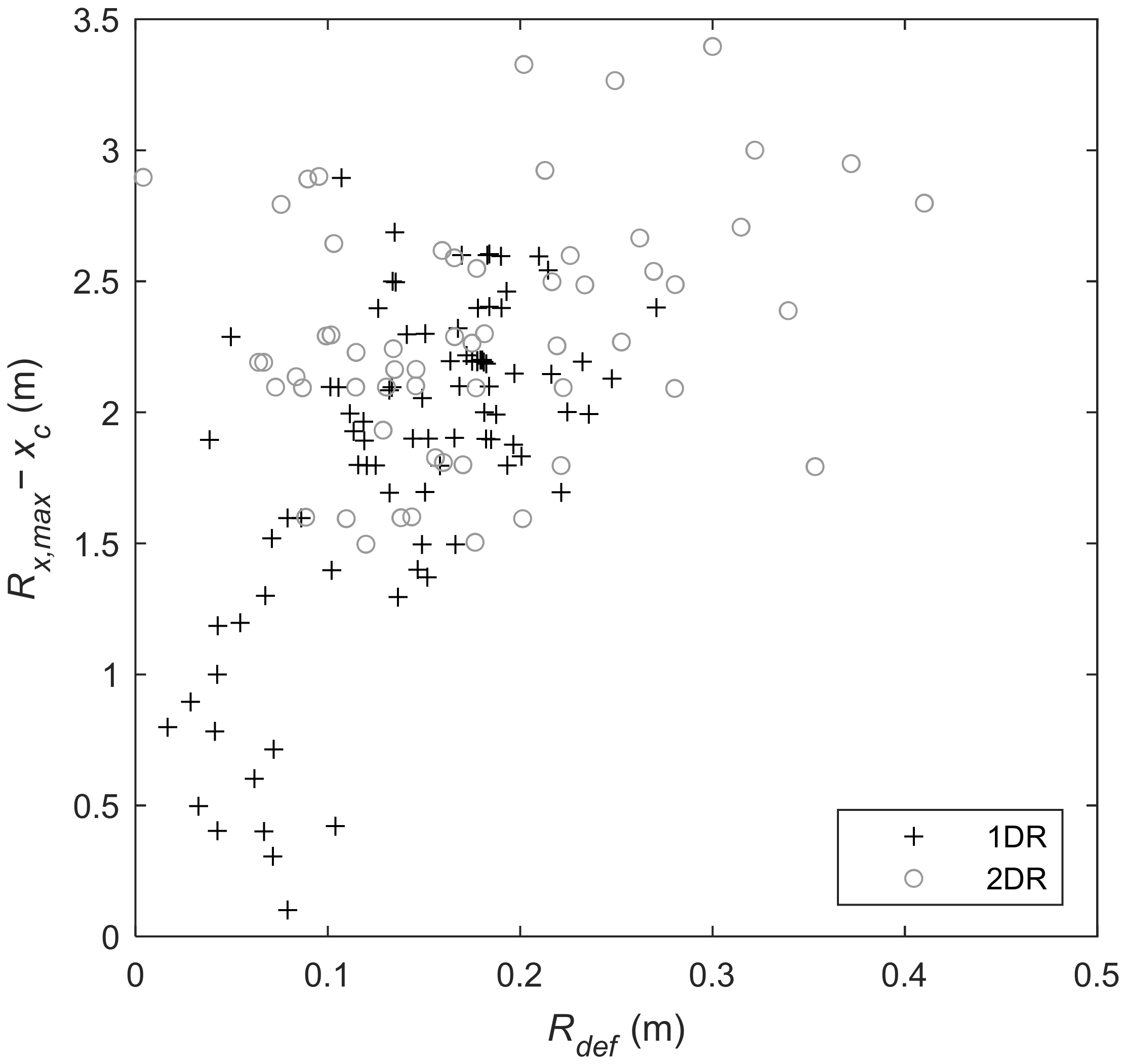
3.3. Spatial Distribution of Overtopping Discharge
Implications for Dynamic Cobble Berm Revetment Design
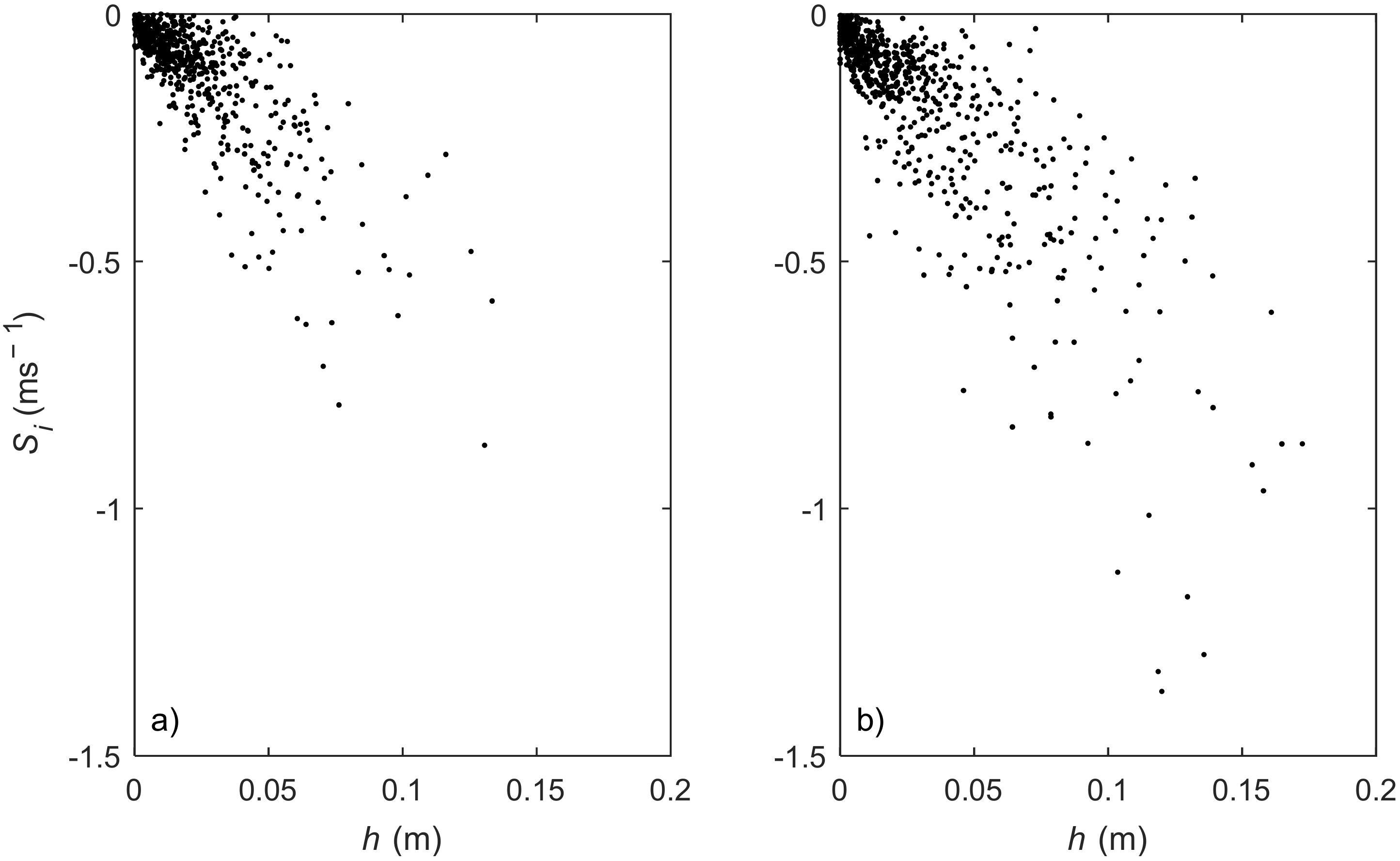
3.4. Infiltration of Overtopping Volume
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van der Meer, J.W.; Janssen, J. Wave Run-Up and Wave Overtopping at Dikes and Revetments; Publication No. 485; Delft Hydraulics: Delft, The Netherlands, 1994. [Google Scholar]
- EurOtop. Manual on Wave Overtopping of Sea Defences and Related Structures. An Overtopping Manual Largely Based on European Research, but for Worldwide Application; Van der Meer, J.W., Allsop, N.W.H., Bruce, T., De Rouck, J., Kortenhaus, A., Pullen, T., Schüttrumpf, H., Troch, P., Zanuttigh, B., Eds.; 2018. Available online: www.overtopping-manual.com (accessed on 12 January 2022).
- Victor, L.; Troch, P. Wave Overtopping at Smooth Impermeable Steep Slopes with Low Crest Freeboards. J. Waterw. Port Coast. Ocean Eng. 2012, 138, 372–385. [Google Scholar] [CrossRef]
- Pullen, T.; Allsop, N.W.H.; Bruce, T.; Pearson, J. Field and laboratory measurements of mean overtopping discharges and spatial distributions at vertical seawalls. Coast. Eng. 2009, 56, 121–140. [Google Scholar] [CrossRef]
- Williams, H.E.; Briganti, R.; Romano, A.; Dodd, N. Experimental analysis of wave overtopping: A new small scale laboratory dataset for the assessment of uncertainty from smooth sloped and vertical coastal structures. J. Mar. Sci. Eng. 2019, 7, 217. [Google Scholar] [CrossRef] [Green Version]
- Troch, P.; Geeraerts, J.; Van de Walle, B.; De Rouck, J.; Van Damme, L.; Allsop, W.; Franco, L. Full-scale wave overtopping measurements on the Zeebrugge rubble mound breakwater. Coast. Eng. 2004, 51, 609–628. [Google Scholar] [CrossRef]
- Briganti, R.; Bellotti, G.; Franco, L.; De Rouck, J.; Geeraerts, J. Field measurements of wave overtopping at the rubble mound breakwater of Rome-Ostia yacht harbour. Coast. Eng. 2005, 52, 1155–1174. [Google Scholar] [CrossRef]
- Pullen, T.; Silva, E.; Brown, J.; Yelland, M.; Pascal, R.; Pinnell, R.; Cardwell, C.; Jones, D. WireWall—Laboratory and field measurements of wave overtopping. In Proceedings of the Coastal Structures Conference 2019, Hannover, Germany, 30 September–2 October 2019. [Google Scholar]
- Allan, J.C.; Hart, R. Profile dynamics and particle tracer mobility of a cobble berm constructed on the Oregon Coast. In Proceedings of the Coastal Sediments’ 07, New Orleans, LO, USA, 13–17 May 2007. [Google Scholar]
- Bayle, P.M.; Blenkinsopp, C.E.; Conley, D.; Masselink, G.; Beuzen, T.; Almar, R. Performance of a dynamic cobble berm revetment for coastal protection, under increasing water level. Coast. Eng. 2020, 159, 103712. [Google Scholar] [CrossRef]
- Bayle, P.M.; Kaminsky, G.M.; Blenkinsopp, C.E.; Weiner, H.M.; Cottrell, D. Behaviour and performance of a dynamic cobble berm revetment during a spring tidal cycle in North Cove, WA, USA. Coast. Eng. 2021, 167, 103898. [Google Scholar] [CrossRef]
- Matias, A.; Masselink, G. Overwash Processes: Lessons from Fieldwork and Laboratory Experiments. In Coastal Storms: Processes and Impacts; Ciavola, P., Coco, G., Eds.; Wiley-Blackwell: Hoboken, NJ, USA, 2017; pp. 175–194. [Google Scholar]
- Leatherman, S.P. Overwash Hydraulics and Sediment Transport; Coastal Sediments: Charleston, SC, USA, 1977. [Google Scholar]
- Leatherman, S.P.; Zaremba, R.E. Overwash and aeolian processes on a US Northeast coast barrier. Sediment. Geol. 1987, 52, 183–206. [Google Scholar] [CrossRef]
- Holland, K.T.; Holman, R.A.; Sallenger, A.H. Estimation of Overwash Bore Velocities Using Video Techniques; Coastal Sediments: Seattle, WA, USA, 1991. [Google Scholar]
- Matias, A.; Ferreira, Ó.; Vila-Concejo, A.; Morris, B.; Dias, J.A. Short-term morphodynamics of non-storm overwash. Mar. Geol. 2010, 274, 69–84. [Google Scholar] [CrossRef]
- Almeida, L.P.; Masselink, G.; McCall, R.; Russell, P. Storm overwash of a gravel barrier: Field measurements and XBeach-G modelling. Coast. Eng. 2017, 120, 22–35. [Google Scholar] [CrossRef] [Green Version]
- Orford, J.D.; Carter, R.W.G. Crestal overtop and washover sedimentation on a fringing sandy gravel barrier coast, Carnsore Point, Southeast Ireland. J. Sediment. Petrol. 1982, 52, 265–278. [Google Scholar]
- Matias, A.; Blenkinsopp, C.; Masselink, G. Detailed investigation of overwash on a gravel barrier. Mar. Geol. 2014, 350, 27–38. [Google Scholar] [CrossRef] [Green Version]
- Matias, A.; Masselink, G.; Castelle, B.; Blenkinsopp, C.E.; Kroon, A. Measurements of morphodynamic and hydrodynamic overwash processes in a large-scale wave flume. Coast. Eng. 2016, 113, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Hofland, B.; Diamantidou, E.; Van Steeg, P.; Meys, P. Wave runup and wave overtopping measurements using a laser scanner. Coast. Eng. 2015, 106, 20–29. [Google Scholar] [CrossRef]
- Oosterlo, P.; Hofland, B.; van der Meer, J.W.; Overduin, M.; Steendam, G.J. Calibration and preparation of field measurements of oblique wave run-up and overtopping on dikes using laser scanners. Coast. Eng. 2021, 167, 103915. [Google Scholar] [CrossRef]
- Blenkinsopp, C.E.; Bayle, P.M.; Conley, D.C.; Masselink, G.; Gulson, E.; Kelly, I.; Almar, R.; Turner, I.L.; Baldock, T.E.; Beuzen, T.; et al. High-resolution, large-scale laboratory measurements of a sandy beach and dynamic cobble berm revetment. Sci. Data 2021, 8, 1–11. [Google Scholar] [CrossRef]
- Ibrahim, M.S.; Baldock, T.E. Swash overtopping on plane beaches—Reconciling empirical and theoretical scaling laws using the volume flux. Coast. Eng. 2020, 157, 103668. [Google Scholar] [CrossRef] [Green Version]
- Martins, K.; Blenkinsopp, C.E.; Power, H.E.; Bruder, B.; Puleo, J.; Bergsma, E.W.J. High-resolution monitoring of wave transformation in the surf zone using a LiDAR scanner array. Coast. Eng. 2017, 128, 37–43. [Google Scholar] [CrossRef]
- Almeida, L.P.; Masselink, G.; Russell, P.E.; Davidson, M.A. Observations of gravel beach dynamics during high energy wave conditions using a laser scanner. Geomorphology 2015, 228, 15–27. [Google Scholar] [CrossRef] [Green Version]
- Schüttrumpf, H.; Oumeraci, H. Layer thicknesses and velocities of wave overtopping flow at seadikes. Coast. Eng. 2005, 52, 473–495. [Google Scholar] [CrossRef]
- Zaalberg, P. The Relation between Cobble Revetments, Sand and Overtopping: A Numerical Approach With OpenFOAM. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Formentin, S.M.; Gaeta, M.G.; Palma, G.; Zanuttigh, B.; Guerrero, M. Flow depths and velocities across a smooth dike crest. Water 2019, 11, 2197. [Google Scholar] [CrossRef] [Green Version]
- EurOtop. Wave Overtopping of Sea Defences and Related Structures—Assessment Manual; Allsop, N.W.H., Pullen, T., Bruce, T., van der Meer, J.W., Schuttrumpf, H., Kortenhaus, A., Eds.; 2007. Available online: www.overtopping-manual.com (accessed on 12 January 2022).
- Turner, I.L.; Masselink, G. Swash infiltration-exfiltration and sediment transport. J. Geophys. Res. Oceans. 1998, 103, 30813–30824. [Google Scholar] [CrossRef]
- Packwood, A.R. The influence of beach porosity on wave uprush and backwash. Coast. Eng. 1983, 7, 29–40. [Google Scholar] [CrossRef]
- McCall, R. Process-Based Modelling of Storm Impacts on Gravel Coasts. Ph.D. Thesis, Plymouth University, Plymouth, UK, 2015. [Google Scholar]
- Judge, A. Measurement of the Hydraulic Conductivity of Gravels Using a Laboratory Permeameter and Silty Sands Using Field Testing with Observation Wells. Ph.D. Thesis, University of Massachusetts Amherst, Amherst, MA, USA, 2013. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blenkinsopp, C.E.; Baldock, T.E.; Bayle, P.M.; Foss, O.; Almeida, L.P.; Schimmels, S. Remote Sensing of Wave Overtopping on Dynamic Coastal Structures. Remote Sens. 2022, 14, 513. https://doi.org/10.3390/rs14030513
Blenkinsopp CE, Baldock TE, Bayle PM, Foss O, Almeida LP, Schimmels S. Remote Sensing of Wave Overtopping on Dynamic Coastal Structures. Remote Sensing. 2022; 14(3):513. https://doi.org/10.3390/rs14030513
Chicago/Turabian StyleBlenkinsopp, Chris E., Tom E. Baldock, Paul M. Bayle, Ollie Foss, Luis P. Almeida, and Stefan Schimmels. 2022. "Remote Sensing of Wave Overtopping on Dynamic Coastal Structures" Remote Sensing 14, no. 3: 513. https://doi.org/10.3390/rs14030513
APA StyleBlenkinsopp, C. E., Baldock, T. E., Bayle, P. M., Foss, O., Almeida, L. P., & Schimmels, S. (2022). Remote Sensing of Wave Overtopping on Dynamic Coastal Structures. Remote Sensing, 14(3), 513. https://doi.org/10.3390/rs14030513