
A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone
Abstract
1. Introduction
2. Characteristics of Smartphone Observations
3. Methods
3.1. GNSS RTK Positioning Algorithm
3.2. Standard Kalman filter
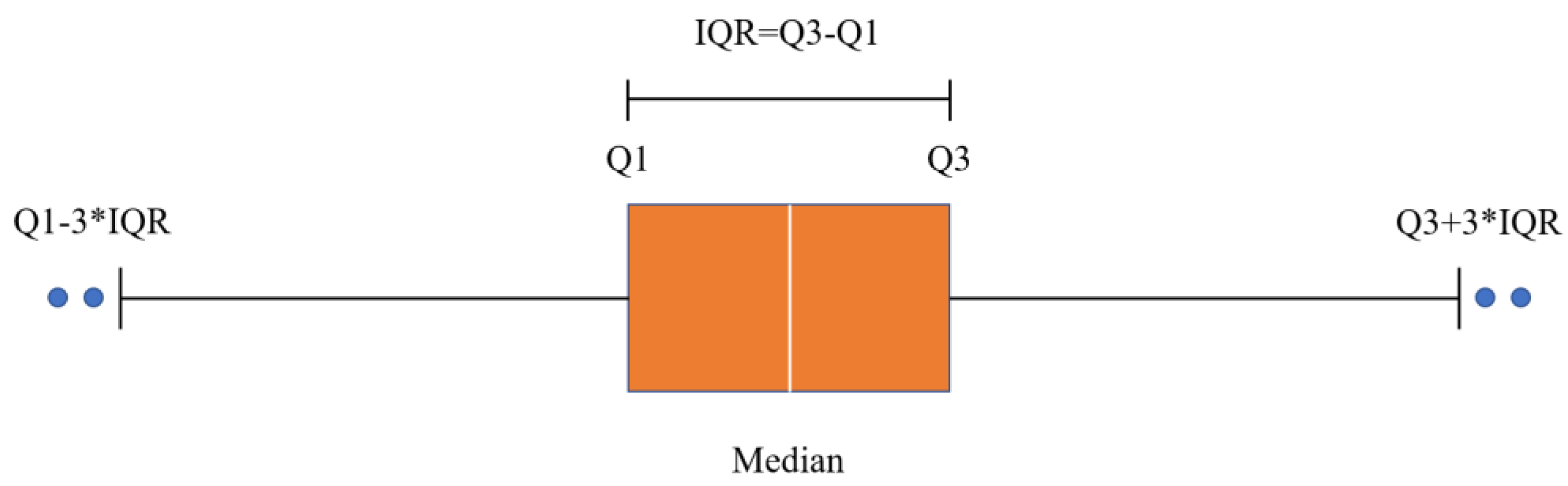
3.3. Quartile Robust Model
3.4. Classification Adaptive Factor Model
4. Experiments and Results Analysis
4.1. Simulated Dynamic Test
- (1)
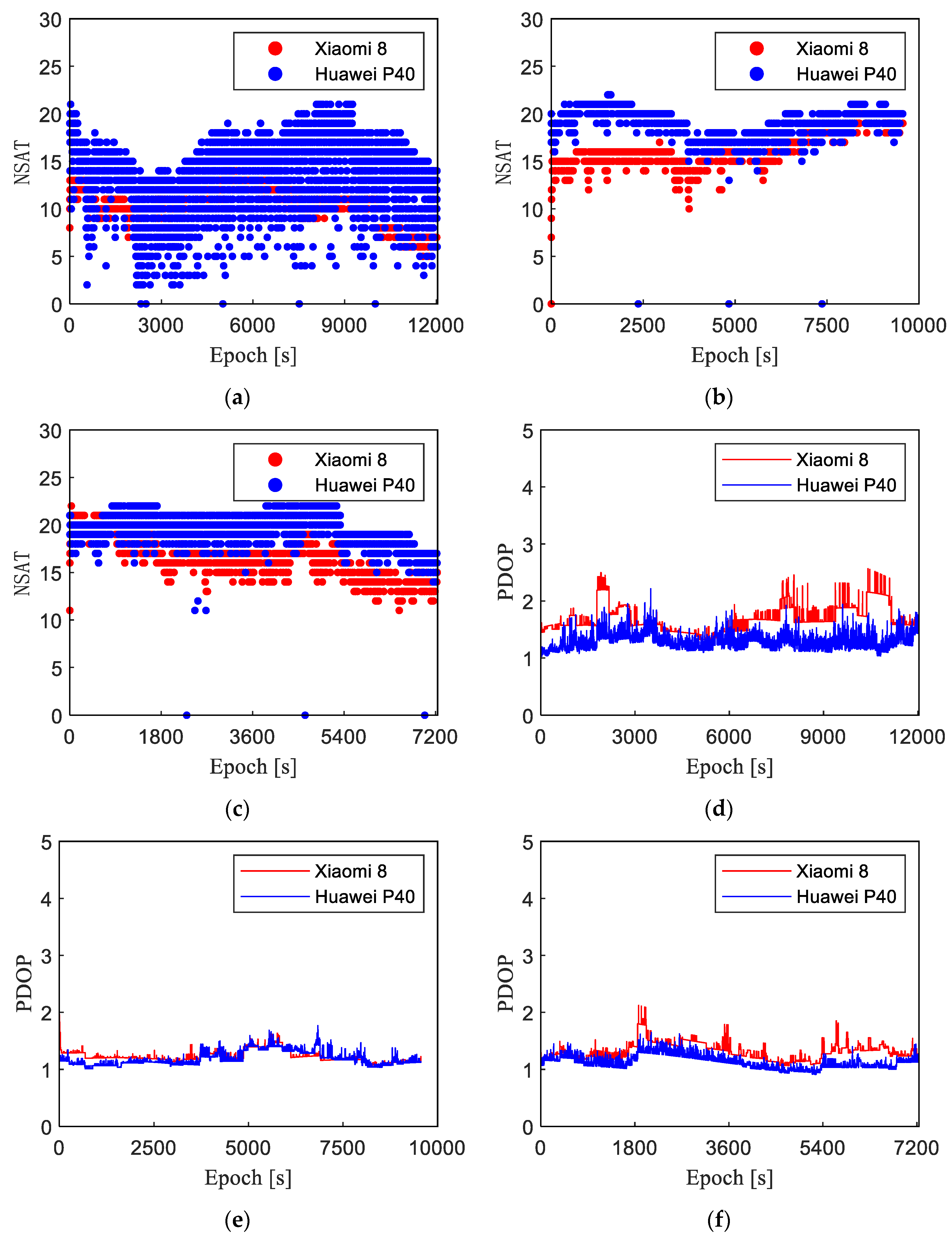
- On average, the Huawei P40 can receive signals from 14.3, 19.1, and 19.6 satellites, and the Xiaomi 8 can receive signals from 10.7, 16.5, and 16.7 satellites. Compared with the latter, the former can track 3–4 more satellites, mainly BDS-3 satellites. This is due to a problem in the design of the hardware signal channel of the Xiaomi 8.
- (2)
- Although the Huawei P40 captures signals from a large number of satellites, most satellites in the sheltered environment (S1) are frequently locked and unlocked alternately. This behavior is mainly related to the antenna layout inside the smartphone and the hardware, such as the internal loop tracker. In a good environment (S2, S3), the Huawei P40 exhibits a stable tracking of more satellites than the Xiaomi 8, providing better satellite geometry.
- (3)
- The PDOP is an important index to measure the satellite positioning accuracy. Generally, a PDOP value of less than 3 is considered to indicate a good satellite spatial geometric distribution. It can be observed from Figure 3d–f and Table 4 that the change trend of the PDOP value is consistent with the number of satellites. As the Huawei P40 can capture signals from a higher number of satellites, the PDOP value is small. However, due to its poor ability to lock satellites in a sheltered environment, the value shows strong fluctuations, which will affect the positioning results.
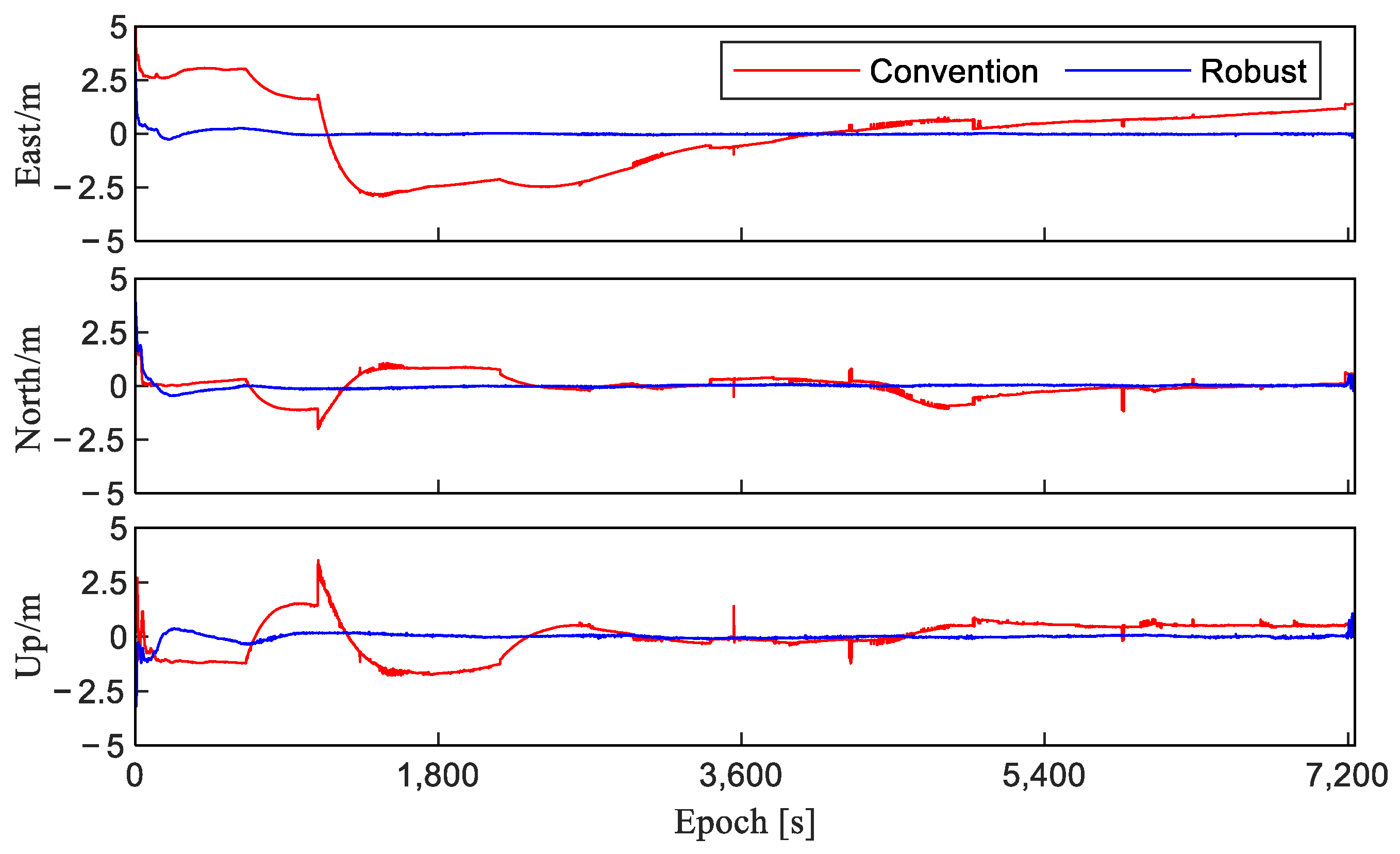
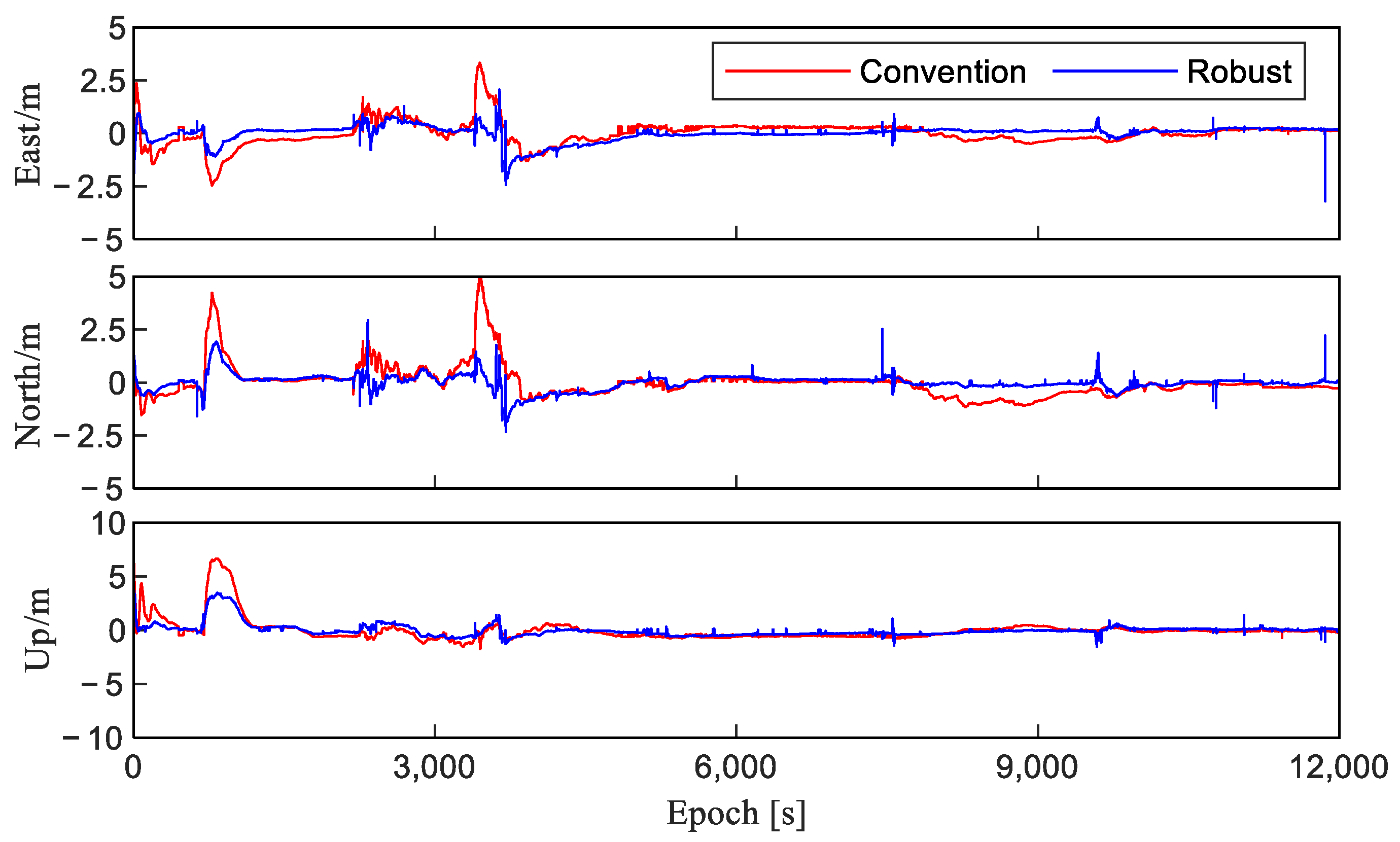
- (1)
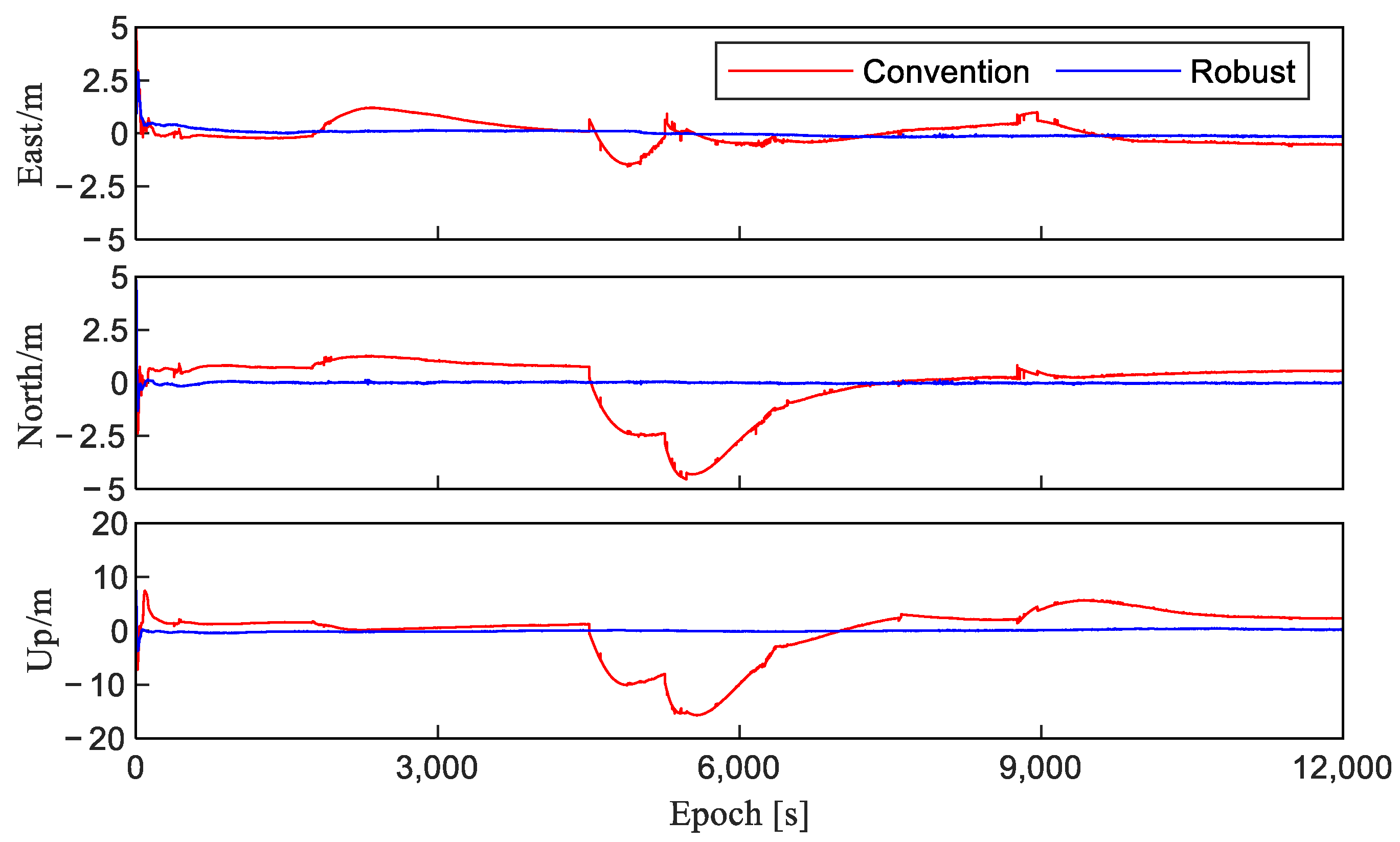
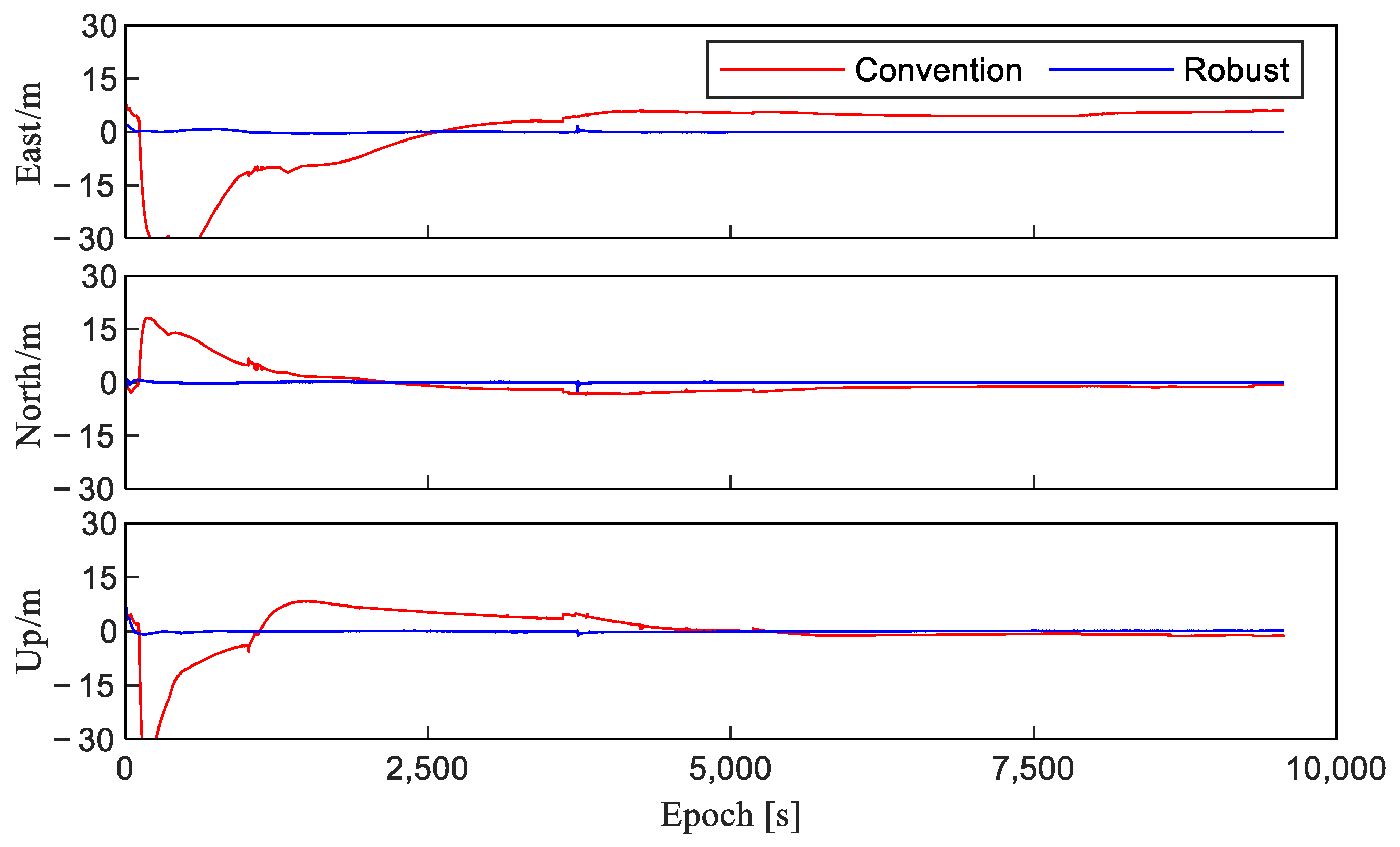
- The Xiaomi 8 cannot converge in the conventional four-system single-frequency RTK solution mode. The robust RTK with the quartile model can eliminate large gross errors and reasonably allocate the weights to the observation values according to the robust weight function. This results in the improvement of its convergence speed and positioning accuracy.
- (2)
- The S1 baseline is an environment where half the sky is sheltered by trees, while S2 and S3 are open-roadside and open-square environments, respectively. However, under the robust RTK solution mode, the baseline planar accuracy of the Xiaomi 8 under S1, S2, and S3 can be kept within 0.3 m, and the elevation positioning accuracy is kept within 0.5 m. As a result, the overall positioning accuracy is significantly improved by more than 85%. This is because the quartile model effectively eliminates gross errors and reasonably assigns weights to observations of different quality, which improves the positioning accuracy.
4.2. Dynamic Test
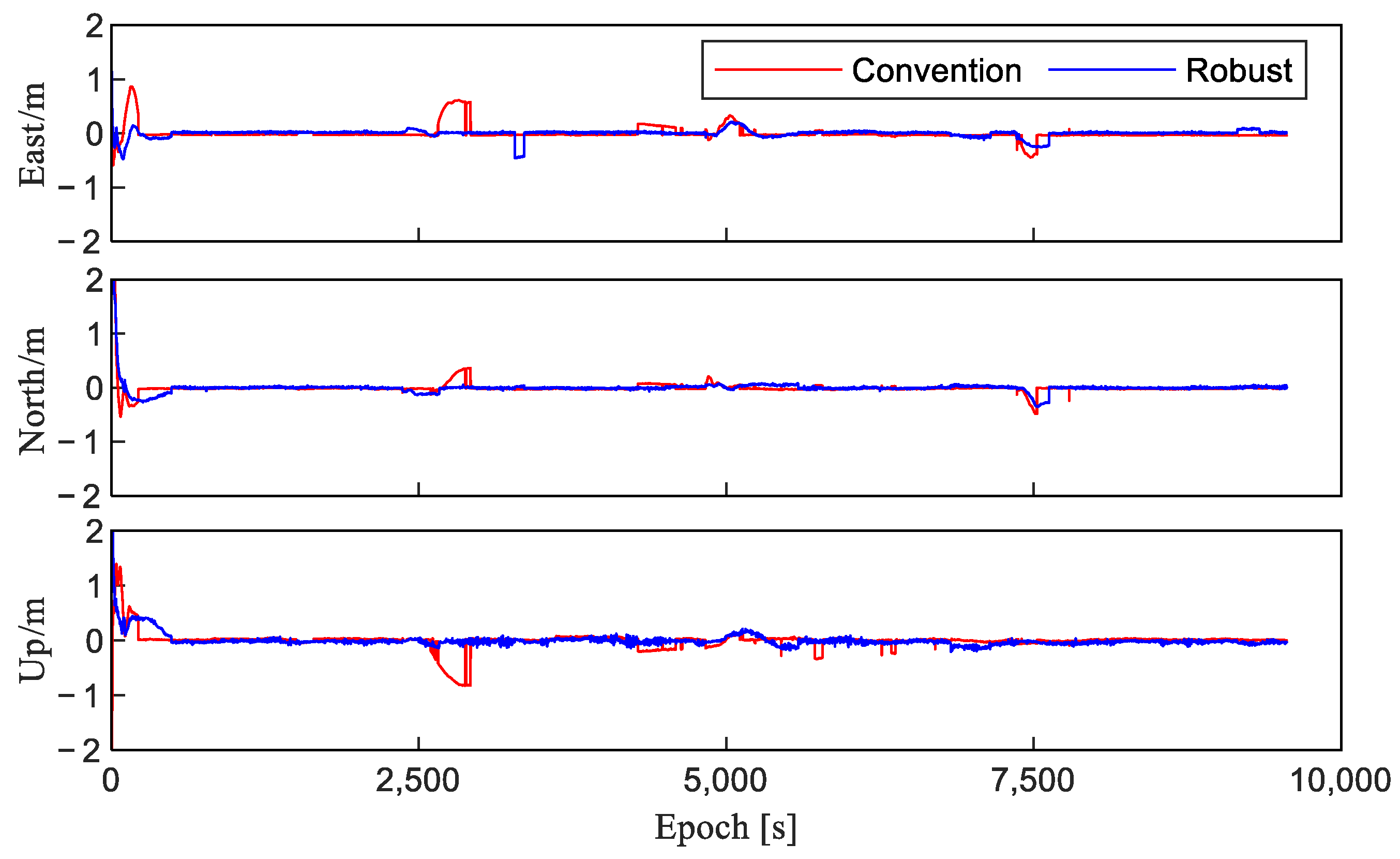
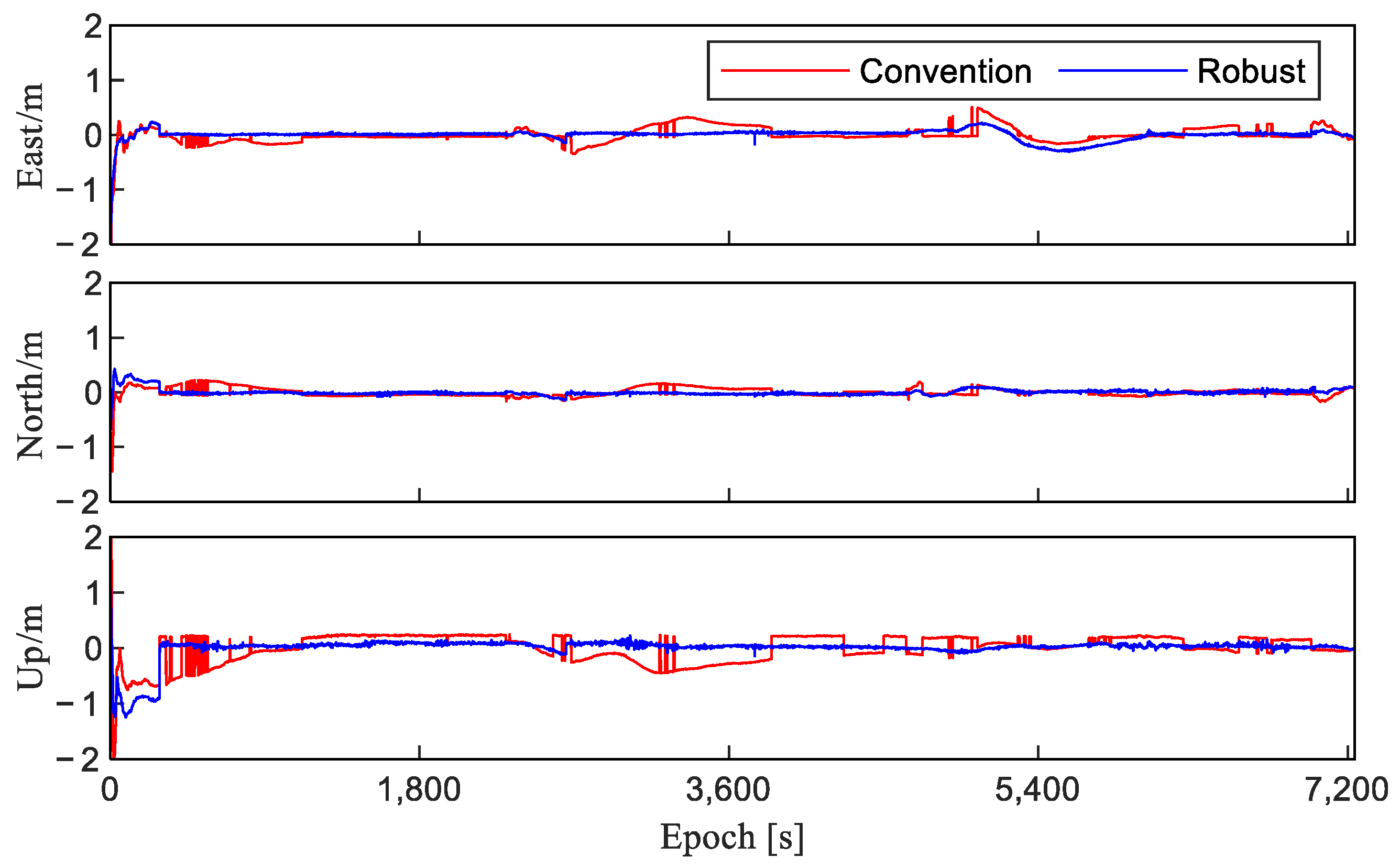
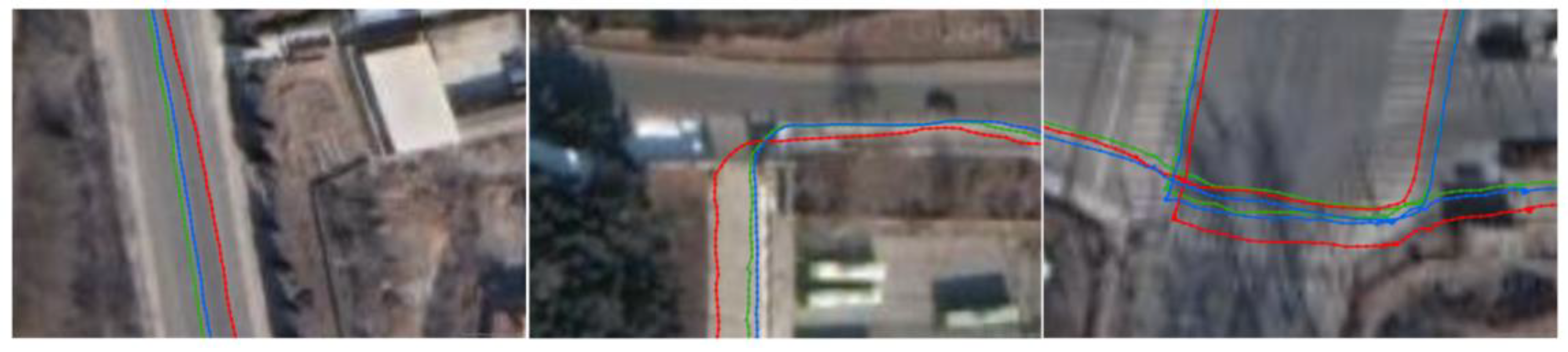
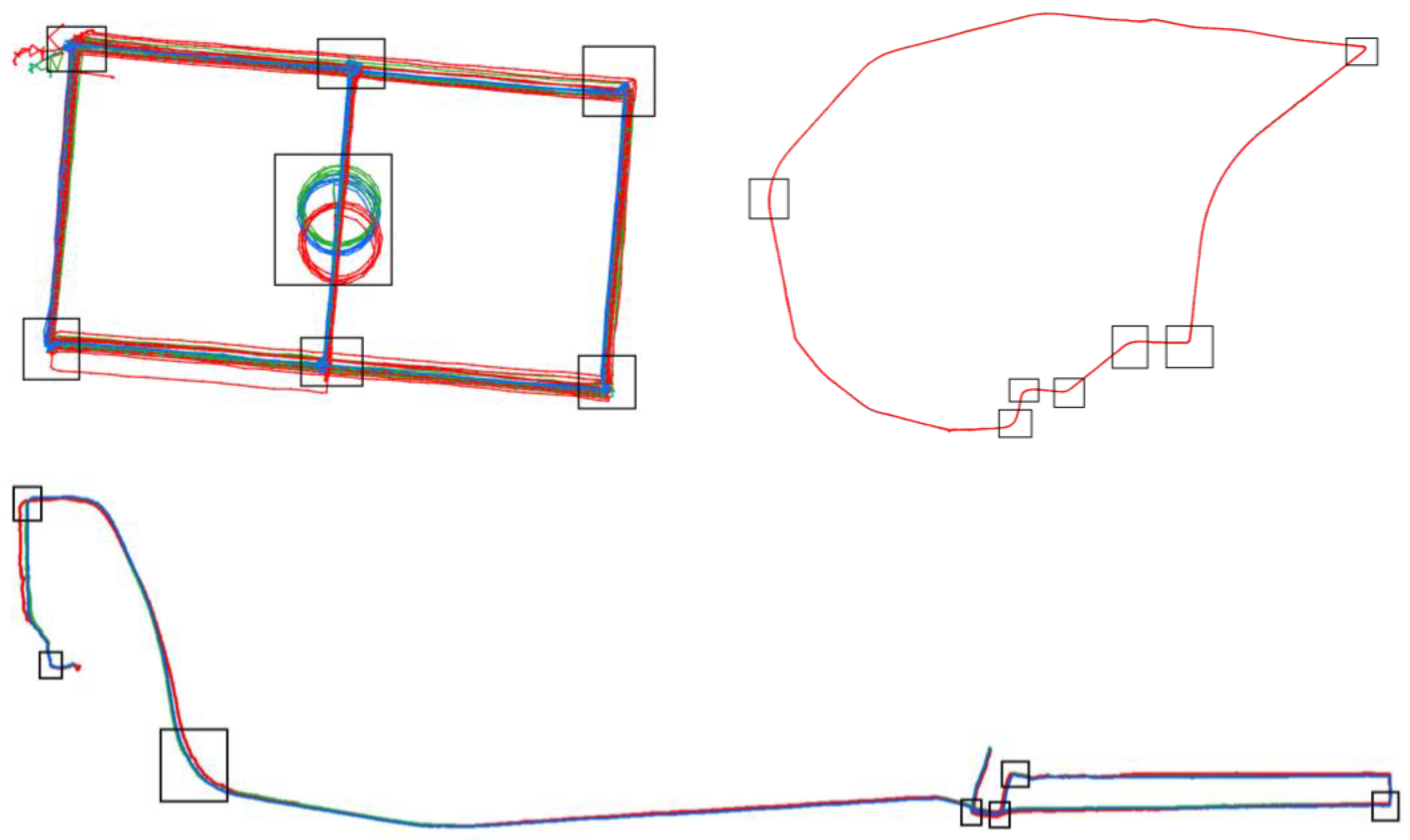
- (1)
- Compared to the solution results obtained using the CHC P5 receiver as a reference, the dynamic trajectory of the red conventional RTK solution results deviates significantly. This deviation is particularly obvious in the turning section because the Kalman filter suffers from hysteresis when there is a sudden motion state change. Consequently, the weight relationship between the predicted and measured values cannot be adjusted in a timely manner. On the other hand, the deviations between the green robust adaptive RTK solution results and the reference track of CHC P5 are small for straight or turning sections, and the track is obviously better. This is because the adaptive model can determine the adaptive factor according to the discriminant statistics, reasonably adjust the weight relationship between the predicted and measured values in a timely manner, and improve the impact caused by the lag of the Kalman filter to a certain extent.
- (2)
- The planar accuracies of D1, D2, and D3 dynamic data from the Xiaomi 8 in the robust adaptive RTK solution mode are 1.474 m, 0.447 m, and 0.777 m, respectively. The corresponding elevation accuracies are 1.851 m, 0.944 m, and 1.679 m, respectively. The overall positioning accuracies increase by 33.8%, 16.9%, and 18.1%, respectively.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Magiera, W.; Vārna, I.; Mitrofanovs, I.; Silabrieds, G.; Krawczyk, A.; Skorupa, B.; Apollo, M.; Maciuk, K. Accuracy of Code GNSS Receivers under Various Conditions. Remote Sens. 2022, 14, 2615. [Google Scholar] [CrossRef]
- Ye, J.; Li, Y.; Luo, H.; Wang, J.; Chen, W.; Zhang, Q. Hybrid Urban Canyon Pedestrian Navigation Scheme Combined PDR.; GNSS and Beacon Based on Smartphone. Remote Sens. 2019, 11, 2174. [Google Scholar] [CrossRef]
- Fortunato, M.; Ravanelli, M.; Mazzoni, A. Real-Time Geophysical Applications with Android GNSS Raw Measurements. Remote Sens. 2019, 11, 2113. [Google Scholar] [CrossRef]
- Håkansson, M. Characterization of GNSS observations from a Nexus 9 Android tablet. GPS Solut. 2018, 23, 21. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Murrian, M.; van Diggelen, F.; Podshivalov, S.; Pesyna, K.M. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 232–242. [Google Scholar] [CrossRef]
- Li, W.; Zhu, X.; Chen, Z.; Dai, Z.; Li, J.; Ran, C. Code multipath error extraction based on the wavelet and empirical mode decomposition for Android smart devices. GPS Solut. 2021, 25, 91. [Google Scholar] [CrossRef]
- Wanninger, L.; Heßelbarth, A. GNSS code and carrier phase observations of a Huawei P30 smartphone: Quality assessment and centimeter-accurate positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef]
- Bakuła, M.; Uradziński, M.; Krasuski, K. Performance of DGPS Smartphone Positioning with the Use of P(L1) vs. P(L5) Pseudorange Measurements. Remote Sens. 2022, 14, 929. [Google Scholar] [CrossRef]
- Gao, C.; Chen, B.; Liu, Y. Android smartphone GNSS high-precision real-time dynamic positioning. Acta Geod. Ecartographica Sin. 2021, 50, 18–26. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, R.; Liu, A. Real-time GNSS precise point positioning with smartphones for vehicle navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Li, M.; Lei, Z.; Li, W.; Jiang, K.; Huang, T.; Zheng, J.; Zhao, Q. Performance Evaluation of Single-Frequency Precise Point Positioning and Its Use in the Android Smartphone. Remote Sens. 2021, 13, 4894. [Google Scholar] [CrossRef]
- Zhang, K.; Jiao, W.; Li, J. Analysis of GNSS Positioning Precision on Android Smart Devices. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1472. [Google Scholar] [CrossRef]
- Geng, J.; Li, G. On the feasibility of resolving Android GNSS carrier-phase ambiguities. J. Geod. 2019, 93, 2621–2635. [Google Scholar] [CrossRef]
- Li, G.; Geng, J. Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solut. 2019, 23, 90. [Google Scholar] [CrossRef]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter positioning with a smartphone-Quality GNSS antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS, Tampa, FL, USA, 8–12 September 2014; Volume 2, pp. 1568–1577. [Google Scholar]
- Darugna, F.; Wübbena, J.B.; Wübbena, G.; Schmitz, M.; Schön, S.; Warneke, A. Impact of robot antenna calibration on dual-frequency smartphone-based high-accuracy positioning: A case study using the Huawei Mate20X. GPS Solut. 2020, 25, 15. [Google Scholar] [CrossRef]
- Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. [Google Scholar] [CrossRef]
- Laurichesse, D.; Rouch, C.; Marmet, F.X.; Pascaud, M. Smartphone Applications for Precise Point Positioning. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 171–187. [Google Scholar]
- Wang, Y.; Hu, J.; Tao, X.; Liu, W.; Zhu, F. Performance Analysis of Dual-frequency GNSS Pseudo-range Differential Dynamic Positioning for Android Smartphones. Navig. Position. Timing 2021, 8, 103–110. [Google Scholar] [CrossRef]
- Guo, F.; Wu, W.; Zhang, X.; Liu, W. Realization and Precision Analysis of Real-Time Precise Point Positioning with Android Smartphones. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1053. [Google Scholar] [CrossRef]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone. Sensors 2020, 20, 6447. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Shen, Y.; Gao, Y.; Wang, M. Site-Specific Unmodeled Error Mitigation for GNSS Positioning in Urban Environments Using a Real-Time Adaptive Weighting Model. Remote Sens. 2018, 10, 1157. [Google Scholar] [CrossRef]
- Gong, X.; Li, Z. A robust weighted total least-squares solution with Lagrange multipliers. Surv. Rev. 2017, 49, 176–185. [Google Scholar] [CrossRef]
- Peng, Z.; Gao, C.; Shang, R. Application of Sage-Husa filter considering innovation vectors in mobile phone GNSS location. J. Navig. Position. 2020, 8, 76–81+89. [Google Scholar] [CrossRef]
- Benvenuto, L.; Cosso, T.; Delzanno, G. An Adaptive Algorithm for Multipath Mitigation in GNSS Positioning with Android Smartphones. Sensors 2022, 22, 5790. [Google Scholar] [CrossRef] [PubMed]
- Su, Z. Single-frequency RTK GNSS Positioning. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2017. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G.; Khodabandeh, A. Single-Frequency PPP-RTK: Theory and Experimental Results; Springer: Berlin/Heidelberg, Germany, 2014; pp. 571–578. [Google Scholar] [CrossRef]
- Zhu, H.; Lei, X.; Li, J.; Gao, M.; Xu, A. The algorithm of integer ambiguity resolution with BDS triple-frequency between reference stations at single epoch. Acta Geod. Cartogr. Sin. 2020, 49, 1388–1398. [Google Scholar]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation Quality Assessment and Performance of GNSS Standalone Positioning with Code Pseudoranges of Dual-Frequency Android Smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef] [PubMed]
- Medina, D.; Li, H.; Vila-Valls, J.; Closas, P. Robust Filtering Techniques for RTK Positioning in Harsh Propagation Environments. Sensors 2021, 21, 1250. [Google Scholar] [CrossRef]
- Niu, Z.; Li, G.; Guo, F.; Shuai, Q.; Zhu, B. An Algorithm to Assist the Robust Filter for Tightly Coupled RTK/INS Navigation System. Remote Sens. 2022, 14, 2449. [Google Scholar] [CrossRef]
- Niu, Z.; Guo, F.; Shuai, Q.; Li, G.; Zhu, B. The Integration of GPS/BDS Real-Time Kinematic Positioning and Visual–Inertial Odometry Based on Smartphones. ISPRS Int. J. Geo-Inf. 2021, 10, 699. [Google Scholar] [CrossRef]
- Yan, W.; Bastos, L.; Gonçalves, J.A.; Magalhães, A.; Xu, T. Image-aided platform orientation determination with a GNSS/low-cost IMU system using robust-adaptive Kalman filter. GPS Solut. 2017, 22, 12. [Google Scholar] [CrossRef]
- Lin, X.; Yang, X.; Hu, C.; Li, W. Improved forward and backward adaptive smoothing algorithm. GPS Solut. 2021, 26, 2. [Google Scholar] [CrossRef]
- Geng, Y.; Wang, J. Adaptive estimation of multiple fading factors in Kalman filter for navigation applications. GPS Solut. 2007, 12, 273–279. [Google Scholar] [CrossRef]
- Yang, C.; Shi, W.; Chen, W. Correlational inference-based adaptive unscented Kalman filter with application in GNSS/IMU-integrated navigation. GPS Solut. 2018, 22, 100. [Google Scholar] [CrossRef]
- Li, M.; He, K.; Xu, T.; Lu, B. Robust adaptive filter for shipborne kinematic positioning and velocity determination during the Baltic Sea experiment. GPS Solut. 2018, 22, 81. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Li, Q.; Xia, J.; Cai, Y. IMU-Aided Precise Point Positioning Performance Assessment with Smartphones in GNSS-Degraded Urban Environments. Remote Sens. 2022, 14, 4469. [Google Scholar] [CrossRef]
- Yan, P.; Jiang, J.; Zhang, F.; Xie, D.; Wu, J.; Zhang, C.; Tang, Y.; Liu, J. An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sens. 2021, 13, 4317. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mobile Phone Type | GNSS Chipsets Type | GPS | GLONASS | GALILEO | BDS | QZSS |
|---|---|---|---|---|---|---|
| Xiaomi 8 | Broadcom BCM47755 | L1/L5 | R1 | E1/E5a | B1I | J1/J5 |
| Huawei Mate 20 | Hisilicon Hi1103 | L1/L5 | R1 | E1/E5a | B1I/ | J1/J5 |
| Huawei P30 | Hisilicon Hi1103 | L1/L5 | R1 | E1/E5a | B1I/ | J1/J5 |
| Huawei P40 | Hisilicon Hi1105 | L1/L5 | R1 | E1/E5a | B1I/B1C/B2a | J1/J5 |
| Solution Mode | Baseline Code | Sampling Interval/s | Sampling Duration/h | Collection Environment | Acquisition Mode | Baseline Length/km |
|---|---|---|---|---|---|---|
| Simulated dynamics | S1 | 1 | 3.34 | tree shelter | static | 0.07 |
| S2 | 1 | 2.66 | broad road | static | 1.10 | |
| S3 | 1 | 2.01 | broad square | static | 9.00 | |
| Dynamic | D1 | 1 | 0.45 | tree shelter | walk | 1.40 (farthest) |
| D2 | 1 | 0.48 | tree shelter | trolley | 0.08 (farthest) | |
| D3 | 1 | 0.66 | broad road | vehicle | 2.87 (farthest) |
| Content | Method |
|---|---|
| Solution mode | GPS(L1) + GLO(R1) + GAL(E1) + BDS-3(B1I) |
| Ephemeris | Broadcast ephemeris |
| Ionospheric model | Klobuchar |
| Tropospheric model | Saastamoinen |
| Stochastic model | elevating angle and uncertainty |
| Parameter estimation model | Robust Kalman filtering |
| Pretreatment rules | ELE < 15°, SNR < 20 dB, Uncertainty > 0.1 |
| Baseline Code | Mobile Phone Type | Effective Satellites | PDOP | ||||
|---|---|---|---|---|---|---|---|
| Max | Min | Ave | Max | Min | Ave | ||
| S1 | Xiaomi 8 | 14 | 5 | 10.7 | 2.55 | 1.32 | 1.68 |
| Huawei P40 | 21 | 2 | 14.3 | 2.21 | 1.04 | 1.28 | |
| S2 | Xiaomi 8 | 20 | 7 | 16.5 | 1.96 | 1.08 | 1.22 |
| Huawei P40 | 22 | 13 | 19.1 | 1.77 | 1.01 | 1.19 | |
| S3 | Xiaomi 8 | 22 | 11 | 16.7 | 2.12 | 1.06 | 1.31 |
| Huawei P40 | 23 | 11 | 19.6 | 1.69 | 0.91 | 1.13 | |
| Baseline Code | Solution Mode | RMS | Planar Accuracy/m | Overall Accuracy/m | Convergence Time/s | ||
|---|---|---|---|---|---|---|---|
| E/m | N/m | U/m | |||||
| S1 | Conventional | 0.547 | 1.306 | 4.836 | 1.416 | 5.039 | - |
| Robust | 0.188 | 0.113 | 0.266 | 0.219 | 0.345 | 74 | |
| Lifting ratio | 65.6% | 91.3% | 94.5% | 84.5% | 93.1% | - | |
| S2 | Conventional | 9.644 | 4.08 | 6.244 | 10.471 | 12.192 | - |
| Robust | 0.234 | 0.123 | 0.361 | 0.264 | 0.448 | 236 | |
| Lifting ratio | 97.6% | 97.0% | 94.2% | 97.5% | 96.3% | - | |
| S3 | Conventional | 1.634 | 0.498 | 0.82 | 1.708 | 1.895 | - |
| Robust | 0.108 | 0.186 | 0.177 | 0.215 | 0.279 | 134 | |
| Lifting ratio | 93.4% | 62.7% | 78.4% | 87.4% | 85.3% | - | |
| Baseline Code | Solution Mode | RMS | Planar Accuracy m | Overall Accuracy/m | Convergence Time/s | ||
|---|---|---|---|---|---|---|---|
| E/m | N/m | U/m | |||||
| S1 | Conventional | 0.579 | 0.785 | 1.084 | 0.975 | 1.458 | 417 |
| Robust | 0.365 | 0.374 | 0.611 | 0.523 | 0.804 | 119 | |
| Lifting ratio | 36.9% | 52.4% | 43.6% | 46.4% | 44.8% | 71.5% | |
| S2 | Conventional | 0.136 | 0.227 | 0.178 | 0.265 | 0.319 | 211 |
| Robust | 0.077 | 0.149 | 0.121 | 0.168 | 0.207 | 54 | |
| Lifting ratio | 43.4% | 34.4% | 32.0% | 36.6% | 35.2% | 74.4% | |
| S3 | Conventional | 0.161 | 0.091 | 0.26 | 0.185 | 0.319 | 415 |
| Robust | 0.104 | 0.058 | 0.198 | 0.119 | 0.231 | 288 | |
| Lifting ratio | 35.4% | 36.3% | 23.8% | 35.7% | 27.6% | 30.6% | |
| Content | Method |
|---|---|
| Solution mode | GPS (L1) + GLO (R1) + GAL (E1) + BDS-3 (B1I) |
| Ephemeris | Broadcast ephemeris |
| Ionospheric model | Klobuchar |
| Tropospheric model | Saastamoinen |
| Stochastic model | Altitude angle and uncertainty |
| Parameter estimation model | Robust adaptive Kalman filtering |
| Content | Method |
| Pretreatment rules | ELE < 15°, SNR < 20 dB, Uncertainty > 0.1 |
| Baseline Code | Solution Mode | RMS | Planar Accuracy/m | Overall Accuracy/m | ||
|---|---|---|---|---|---|---|
| E/m | N/m | U/m | ||||
| D1 | Conventional | 1.765 | 1.443 | 2.173 | 2.28 | 3.15 |
| Robust adaptation | 0.828 | 1.22 | 1.851 | 1.474 | 2.085 | |
| Lifting ratio | 53.1% | 15.5% | 14.8% | 35.4% | 33.8% | |
| D2 | Conventional | 0.458 | 0.549 | 1.034 | 0.715 | 1.257 |
| Robust adaptation | 0.345 | 0.285 | 0.944 | 0.447 | 1.045 | |
| Lifting ratio | 24.7% | 48.1% | 8.7% | 37.5% | 16.9% | |
| D3 | Conventional | 0.637 | 0.656 | 2.067 | 0.914 | 2.26 |
| Robust adaptation | 0.603 | 0.49 | 1.679 | 0.777 | 1.85 | |
| Lifting ratio | 5.3% | 25.3% | 18.8% | 15.0% | 18.1% | |
| Baseline Code | Solution Mode | RMS | Planar Accuracy /m | Overall Accuracy/m | ||
|---|---|---|---|---|---|---|
| E/m | N/m | U/m | ||||
| D1 | Conventional | 2.979 | 1.875 | 3.835 | 3.521 | 5.206 |
| Robust adaptation | 0.712 | 1.204 | 1.286 | 1.399 | 1.900 | |
| Lifting ratio | 76.1% | 35.8% | 66.5% | 60.3% | 63.5% | |
| D2 | Conventional | 0.186 | 0.590 | 0.797 | 0.619 | 1.009 |
| Robust adaptation | 0.101 | 0.268 | 0.554 | 0.286 | 0.624 | |
| Lifting ratio | 45.6% | 54.6% | 30.5% | 53.7% | 38.2% | |
| D3 | Conventional | 0.342 | 0.380 | 1.786 | 0.511 | 1.858 |
| Robust adaptation | 0.169 | 0.113 | 1.428 | 0.203 | 1.443 | |
| Lifting ratio | 50.7% | 70.4% | 20.0% | 60.3% | 22.4% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Mi, J.; Xu, Y.; Li, B.; Jiang, D.; Liu, W. A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone. Remote Sens. 2022, 14, 6388. https://doi.org/10.3390/rs14246388
Li Y, Mi J, Xu Y, Li B, Jiang D, Liu W. A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone. Remote Sensing. 2022; 14(24):6388. https://doi.org/10.3390/rs14246388
Chicago/Turabian StyleLi, Yuxing, Jinzhong Mi, Yantian Xu, Bo Li, Dingxuan Jiang, and Weifeng Liu. 2022. "A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone" Remote Sensing 14, no. 24: 6388. https://doi.org/10.3390/rs14246388
APA StyleLi, Y., Mi, J., Xu, Y., Li, B., Jiang, D., & Liu, W. (2022). A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone. Remote Sensing, 14(24), 6388. https://doi.org/10.3390/rs14246388