Abstract
The prior zenith hydrostatic delay (ZHD) is an essential parameter for the Global Navigation Satellite System (GNSS) and very long baseline interferometry (VLBI) high-precision data processing. Meanwhile, the precise ZHD facilitates the separation of the high-precision zenith wet delay (ZWD) to derive precipitable water vapor (PWV). This paper analyzes the temporal variations in the residuals between GPT3 ZHD and reference ZHD from radiosonde (RS) sites, and a calibrated GPT3 (CGPT3) model is proposed for the site-specific ZHD estimation in the Chinese mainland and its surrounding areas based on the annual, semi-annual, and diurnal variations in residuals. Based on the validation using modeling RS data, the mean absolute error (MAE) and root mean square (RMS) of the CGPT3 model are 7.3 and 9.6 mm, respectively. The validation with RS ZHD not involved in the modeling suggests that the MAE and RMS of the CGPT3 model are 7.9 and 10.2 mm, respectively. These results show improvements of 16.8%/16.8% and 14.3%/13.6%, respectively, compared with the MAE and RMS of the GPT3 model and the newly proposed model (GTrop). In addition, the CGPT3 model has excellent spatial and temporal stability in the study area.
1. Introduction
The delay and bending of signals of microwave-based space geodetic techniques such as Global Navigation Satellite System (GNSS) and very-long baseline interferometry (VLBI), propagating through the troposphere due to the nonvacuum conditions, are known as tropospheric delays [1]. These delays may be modeled by mapping the sum of the zenith hydrostatic delay (ZHD) and zenith wet delay (ZWD) to the slant direction of signals [1]. Accurate prior ZHD is significant in GNSS/VLBI data processing. The improvement of its accuracy is conducive to improving the positioning accuracy of GNSS and precise baseline determination of VLBI [2,3,4]. Besides, precipitable water vapor (PWV) monitoring and GNSS/VLBI precise solutions (positions, orbits, clocks/baselines) require an accurate ZHD to separate the ZWD [5,6,7]. A potential technique for real-time, continuous, and high spatial resolution PWV detection is also made available by the widespread deployment of continuously operating reference station (CORS) systems. Therefore, high-precision prior ZHD is also very important for PWV monitoring.
By physical principles, several researchers have accurately calculated ZHD using observed pressure or temperature and other meteorological parameters [8,9]. However, the application of these models is greatly limited, as most permanently installed GNSS sites cannot collect high-quality collocated meteorological parameters. A series of empirical models have been developed to address this problem, including the UNB series model [10,11], the TropGrid series model [12,13], and the Global Pressure and Temperature (GPT) series model [14,15,16,17]. Collins and Langley [10] established UNB1–4 by employing standard atmosphere supplements to extract the annual mean and annual amplitude of atmospheric parameters (temperature, pressure, water vapor pressure, temperature vertical decline rate, water vapor pressure vertical lapse rate) and subsequent storage in a table with a latitude interval of 15°. These models are capable of estimating tropospheric parameters such as ZHD. The reanalysis data provided by the National Centers for Environmental Prediction (NCEP) were used to fit the annual and daily variation coefficients of meteorological parameters to address the poor spatial resolution of the UNB series. Then, the TropGrid and TropGrid2 models that can calculate ZHD were proposed using the coefficients, which are stored in 1° by 1° grids [12,13]. These models improve the spatial resolution, neglecting the semi-annual variation of ZHD. Boehm et al. [14] calculated the annual variation parameters of pressure and temperature using the ERA-40 data provided by the European Centre for Medium-Range Weather Forecasts (ECMWF) to represent the coefficients by 9th-order and 9-degree spherical harmonic function, and subsequently proposed the GPT model. Lagler et al. [15] improved the pressure height correction method by adding a semi-annual variation term, optimizing the means of pressure height correction, and extending the horizontal resolution of GPT to 5° × 5° to establish the GPT2 model. Böhm et al. [16] further improved the GPT2 model and constructed the global pressure and temperature 2 wet model (GPT2w) with 1° × 1° and 5° × 5° horizontal resolution by adding two output parameters (e.g., water vapor decrease factor and weighted mean temperature). The most recent version of the GPT series model is the GPT3 model. As the meteorological parameters are the same in the GPT3 and GPT2w models, both these models have comparable accuracy in estimating ZHD, with a global average RMS of 15.5 mm [18] and an accuracy of 10.4 mm in China [19]. The GPT3 model is a highly effective, empirical, tropospheric model that has been adopted worldwide [20,21].
The quality of ZHDs of the empirical models over regions with sufficient dense data is higher, while those over areas with sparse observations and highly variable topography are deficient [22]. The global RMS of ZHD of the GPT3 model is 2.0 mm [23], while the regional RMS is about 22.51 mm at the higher latitudes, about 16.50 mm at the mid-latitudes, and about 5.77 mm at the lower latitudes [24]. Cao et al. [25] validated the GPT3 ZHD using the ZHD derived from radiosonde (RS) sites with a regional accuracy of 10.1 mm in China. The accuracy of GPT3 ZHD considerably varies regionally, with a significant loss in accuracy observed over specific regions. Therefore, further increasing the accuracy of the GPT3 ZHD remains a research point in GNSS positioning/navigation, VLBI-based precise trajectory determination, and GNSS meteorology, especially for regional areas.
The geography of the Chinese mainland is extremely diverse, which is high in the west and low in the east. In addition, the spatial variation of climate is significant in China. Both result in complex temporal and spatial variations in tropospheric parameters [26,27,28], making ZHD modeling challenging. In addition, the region has a vast GNSS market [29], and the expansion of the BeiDou system’s global network has resulted in a considerable increase in the number of GNSS and BeiDou system users. However, few previous studies have focused on comprehensively evaluating and refining the performance of GPT3 in China. The present study compared the time variation of residuals between GPT3 ZHD and RS ZHD and developed a site-specific calibration model (CGPT3) considering the annual, semi-annual, and diurnal variations in GPT3 ZHD residuals in China. The CGPT3 model’s performance has been modified in a promising way to offer higher-precision ZHD in the typical range of certain sites or co-location in comparison with GPT3.
2. Study Area and Data
2.1. Study Area
The study area covers the enormous terrain of the whole Chinese mainland and is located between 15°N–55°N and 70°E–135°E (see Figure 1). The area includes both mid- and low-latitude regions with diverse climates, strong land–sea interaction, and complex spatiotemporal variability in tropospheric information [30,31]. The region also has a relatively large GNSS market. GNSS and BeiDou users are increasing as the system’s global network has become fully operational. The performance of GNSS positioning and meteorological applications in this region can be enhanced by providing high-precision ZHD. Therefore, this area is selected for the validation and modification of the GPT3 model.
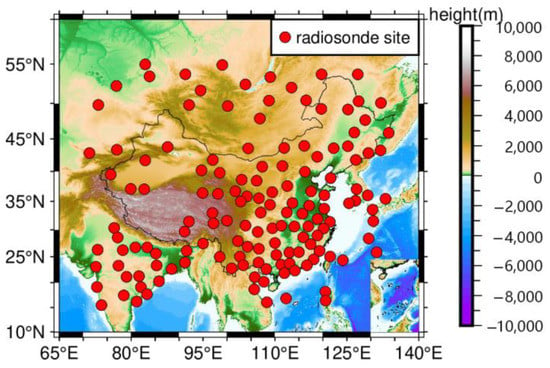
Figure 1.
Distribution of the study area and the selected radiosonde sites.
2.2. Dataset
Radio sounding detects meteorological parameters such as air pressure, temperature, wind speed, relative humidity, and potential by releasing a balloon loaded with meteorological sensors, including the ground to about 30 km above the ground. It is commonly used to validate other observations and models [31,32,33]. Since ZHD can be determined with in situ pressure observations in mm-level accuracy [7,34,35] using the Saastamoinen model [9], the bottom-level pressure data from 148 RS sites with a temporal resolution of 12 h (0:00 and 12:00 UTC) from 2013 to 2017 were collected for modeling and validation. To obtain reliable ZHD observations, the interquartile range (IQR) [36] was employed to eliminate the gross errors of the ZHD time series. The gross error in the ZHD time series was removed by establishing the periodic model (whose formula is referred to in Zhao et al.’s work [37]) at each site. Data from 2013 to 2016 were used for internal accuracy validation, where internal accuracy validation is the degree of fit of the model and represents the accuracy of the new model at the modeling site, and external accuracy validation used data from 2017, where external accuracy is the term used to test the correctness of the model at the site and can show applicability. The distribution of all the selected sites (marked with red dots) is shown in Figure 1.
3. Methods
3.1. Retrieval of ZHD
The accuracy of ZHD is related to the atmospheric pressure and based on the measured pressure. The accuracy of ZHD obtained by Saastamoinen’s model [9] can reach millimeter accuracy [7,34,35]. The Saastamoinen model optimized by Davis et al. [1] is as follows:
where denotes the atmospheric pressure (hPa), denotes the latitude, and denotes the geodetic height (km).
3.2. GPT3 Model
In GPT3 models, the pressure is estimated from the modified Julian day, latitude, longitude, and geodetic height based on the meteorological grid parameters, and ZHD is estimated from the Saastamoinen model. The formula for calculating the meteorological parameters of GPT3 at the grid is as follows [17]:
where is the meteorological parameter (pressure, temperature, temperature lapse rate, mean temperature weighted with the water vapor, etc.), is the day of the year, is the mean value, and (,) and (,) are the annual amplitudes and semi-annual amplitudes, respectively. The GPT3 model provides two versions with the horizontal resolution of 1° × 1° and 5° × 5°, with accuracy at the former being higher than that at the latter [21]. Hence, this paper used the 1° × 1° version for modeling and comparison.
3.3. GTrop Model
The empirical model GTrop by Sun et al. [38] is a recently released ZHD model with open-source code developed to compute ZHD based on the long-term/annual/semi-annual ZHD variations and the optimized height-correction approach. In this paper, the GTrop model was used as a comparative model. The model equation is as follows:
where (i = 1~12) denotes model coefficients, denotes the year, and and denote the target height (km) and grid height (km), respectively. These coefficients were stored in a regular 1° grid.
3.4. Performance Validation Metrics
The performance of the models was validated with the mean absolute error (MAE) and the root mean square (RMS). The specific formulas are as follows:
where is the model estimated ZHD, is the reference value, and is the total number of ZHDs.
3.5. Variations of GPT3 ZHD Residuals
The fast Fourier transform (FFT) is an efficient algorithm of the discrete Fourier transform normally applied for the analysis of the periodicity of time series [39]. Firstly, the seasonal variation was assessed by applying FFT to the residuals from RS ZHD and GPT3 ZHD of 148 sites during 2013–2016. The power spectrums of these residuals in four typical sites are shown in Figure 2. These four sites are located in the eastern (DALIAN), central (JIUQUAN), northern (BAGDARIN), and southern (XICHANG) parts of the study area, respectively. The horizontal line in the figure represents the significance test threshold, which was set at a threshold of 95% of the peak values to indicate the significance of the peak. These four sites showed two significant peaks at 182.625 and 365.250 days, and three of them exceeded the significance test thresholds, indicating semi-annual and annual variation in residuals for these three sites. The peak variation of the 365.250-day is greater than that of the 182.625-day at the JIUQUAN sites, while the peak variation of the 182.625-day is greater than that of the 365.250-day at the BAGDARIN site. These findings indicate annual and semi-annual variations in signals at different sites, and the various types of variations at the 148 sites are listed in Table 1. The number of sites with annual and semi-annual variations reached 68.9% and 60.8%, respectively, and 39.2% of sites had both annual and semi-annual variations. Previous studies have shown that when the data meet the requirements of higher resolution, these higher-resolution variations are taken into account by the model, and the higher accuracy the model achieves [32,40,41]. In this context, the present study proposes considering the annual and semi-annual variations of the residuals during their calibration. Further, the signal-to-noise ratio of the diurnal signals was improved by setting a high-pass filter to filter out the residuals’ seasonal variation. Please note that due to the 12 h sampling of RS, the FFT diurnal signals represent the sum of all the signals with frequencies ≤1 day, including the diurnal one. Then, an FFT analysis was executed on the residual signal, and the power spectrums of the diurnal signal of the ZHD residuals at the four sites are shown on the right panels in Figure 2. Three sites showed significant peaks at 1.0 days, with JIUQUAN and XICHANG showing the strongest diurnal fluctuation in residuals. The statistics of sites exhibiting diurnal variations are also listed in Table 1, and the percentage of sites with observed diurnal variation was 42.6%. Similarly, the percentage of sites with annual and semi-annual variations was 39.2%, and that with annual/semi-annual/diurnal variations was 18.2%. The distribution of sites with different types of variations is illustrated in Figure 3. It can be seen that variations of residuals have specific regional features with at least one type of period variation at each site, except for a few sites in the northern and eastern regions. The explanation might have to do with the smaller amplitudes of annual, semi-annual, and diurnal variation in the northern region and the influence of the ocean on the western Pacific coast climate [42].
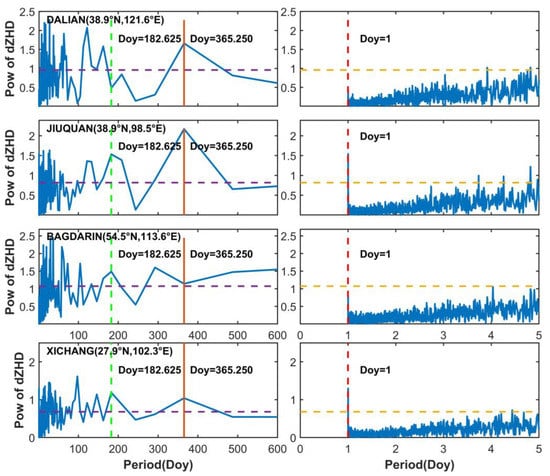
Figure 2.
Power (Pow) spectrums of residuals in DALIAN, JIUQUAN, BAGDARIN, and XICHANG sites. DOY is the day of the year.

Table 1.
The statistics chart of variation types.
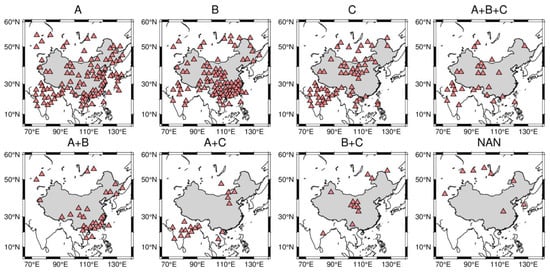
Figure 3.
Distribution of sites with different types of variations.
Although the periodic characteristics of the different regions varied slightly, the overall degrees of annual, semi-annual, and diurnal variations in the GPT3 ZHD residuals in the study area were significant, and these residual variations were all considered for accurately modeling at all stations. Even though semi-diurnal variations may also be present in the residuals of GPT3 ZHD, their inclusion in the model was not found due to the 12 h temporal resolution of RS ZHD, and the increase in parameters will lead to a longer fitting time and may result in accuracy loss. Therefore, the semi-diurnal variation was not considered while building the residual calibration model.
3.6. Specific Site Calibration Model for GPT3 ZHD
According to the analysis of variations from the GPT3 ZHD residuals, the variations in residuals (dZHD) were characterized using Equation (7):
where is UTC, is the annual mean value of , , , and are the amplitudes of the annual, semi-annual, and diurnal variations, and , , and are the initial phases of the annual, semi-annual, and diurnal variations, respectively.
The (i = 1~6) was fitted and solved using the residuals at 148 specific sites from 2013 to 2016 by the least squares method. Further, a calibrated GPT3 ZHD model was constructed for the specific sites and named CGPT3, as:
where denotes the ZHD derived from CGPT3, denotes the ZHD derived from the GPT3 model, and the is derived from Equation (7).
When using this model to estimate ZHD at specific RS sites and the sites within areas for the co-location, the criterion for co-location is that the horizontal distances in latitudinal and longitudinal directions are less than 30 km, and the vertical difference in height is less than 100 m between the RS site and the interesting site [43].
4. Results
4.1. Validation of Internal Accuracy
After fitting the dZHD from GPT3 and RS from 2013 to 2016 by the least squares method through Equation (7), the CGPT3 ZHD obtained by combining GPT3 ZHD was tested for accuracy based on RS ZHD, which is the internal accuracy. It can be used to check the reasonableness of the modeling. The internal accuracy of the model was validated using RS ZHD from 2013 to 2016. The MAE and RMS of both CGPT3 and GPT3 models are shown in Table 2. The CGPT3 MAE ranged from 0.8 to 16.4 mm with an average of 7.3 mm, which shows a 17.0% improvement compared to the GPT3 model. Similarly, the CGPT3 RMS varied from 1.9 to 21.4 mm, showing an improvement compared to GPT3 RMS, which ranged from 2.0 to 54.5 mm. In addition, the mean RMS was 9.6 mm, which is 1.7 mm (15.0%) less than the GPT3 model. It can be inferred from the above findings that compared to the GPT3 ZHD, the CGPT3 ZHD agrees more consistently with the reference data.
Table 2.
Accuracy of ZHD derived from GPT3 and CGPT3 models for 148 sites from 2013 to 2016.
The performance of the CGPT3 model is graphically analyzed in Figure 4, which illustrates the MAE and RMS of the CGPT3 model and GPT3 model at each site. As shown in Figure 4, at most sites, the CGPT3 MAE varied from 1 to 10 mm, while the GPT3 MAE was over 10 mm. Except for a few sites in the northwest, the CGPT3 RMS ranged between 1.9 and 21.4 mm, with CGPT3 RMS values within 15 mm at most sites. In contrast, the maximum value of GPT3 ZHD was over 50 mm. In conclusion, the CGPT3 model is consistently superior to GPT3.
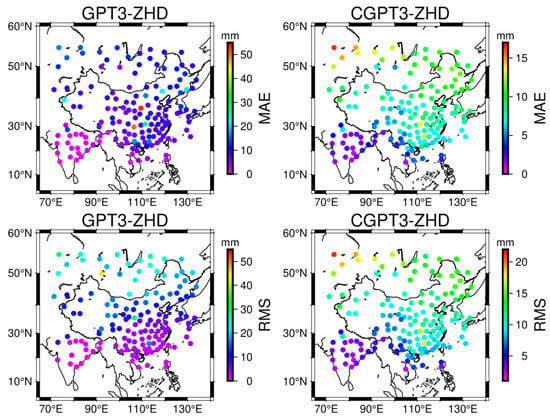
Figure 4.
Distribution of MAE and RMS from the ZHD derived from GPT3 and CGPT3 models validated by modeling data (left—GPT3, right—CGPT3).
4.2. Validation of External Accuracy
The accuracy of the model was tested using data that were not involved in the modeling to obtain the accuracy of external conformity, i.e., external accuracy. It reflects the applicability of the model. The CGPT3 model, which was not used in the modeling, was validated for external accuracy using the 2017 RS ZHD and compared with the GPT3 and GTrop models. Due to the significant data loss from some sites, a total of 140 sites were selected, where at least 120 days of observations could be found in 2017. As illustrated in Table 3, the MAE of CGPT3 ranged from 1.9 to 27.9 mm, with an average of 7.9 mm, which is 1.6 mm less than both GPT3 and GTrop models. Moreover, the RMS ranged from 3.1 to 32.9 mm, which is more stable than the GPT3 (3.1 to 52.5 mm) and GTrop (3.1 to 52.2 mm) models. The 1.7 and 1.6 mm reductions from the GPT3 and GTrop models were represented by the mean RMS of 10.2 mm. The statistical results indicate that the MAE and RMS were improved by 16.8%/16.8% and 14.3%/13.6%, respectively, when compared to the GPT3 and GTrop models. In conclusion, the CGPT3 model has the best overall accuracy. According to Boehm [44], if the cutoff elevation angle is low, such as 5°, and the error of hydrostatic zenith delay is then mapped with the wrong mapping function (wet and hydrostatic mapping functions’ errors are both considered), a proportional relation of approximately 0.12 between the resulting GNSS height error and the ZHD error can be found. In this case, the maximum MAE of GPT3/Gtrop ZHD of 51.5/51.2 mm corresponded to the resulting GNSS height error of approximately 6.2 mm, while the CGPT3 ZHD had the maximum MAE of 27.9 mm, which corresponded to the resulting GNSS station height error of approximately 3.3 mm. This means the CGPT3 would achieve the maximum precision improvements in 2.9 mm (45.7%) for GNSS height estimation in comparison to the GPT3/GTrop model. Moreover, the average precision improvements of the CGPT3 model for GNSS height estimation were approximately 17% compared to GPT3 and GTrop models.
Table 3.
Accuracy of ZHD derived from GPT3, GTrop, and CGPT3 models at 140 sites in 2017.
As the models’ ZHD accuracy is associated with latitude and height [9], the latitude was divided into eight sections (from 15° to 55° with an interval of 5°) for the analysis of variations in MAE and RMS, which are shown in Figure 5a,b. The three sets of MAE/RMS trends were generally consistent in all the models, and MAE and RMS steadily increased with the increasing latitude. However, among the three models, the CGPT3 model exhibited the least scatter of all three components without any abrupt increases. Moreover, the MAE ranged from 3 to 12 mm, with a maximum RMS not exceeding 16 mm. The improvement rates of the absolute values of MAE and RMS of CGPT3 in comparison with the GPT3 and GTrop models at the different latitudes are shown in Figure 5c,d. Additionally, compared to GPT3 and GTrop models, the accuracy metrics of the CGPT3 model were enhanced at most latitudes, where the rates of improvement in MAE and RMS reached up to 30%.
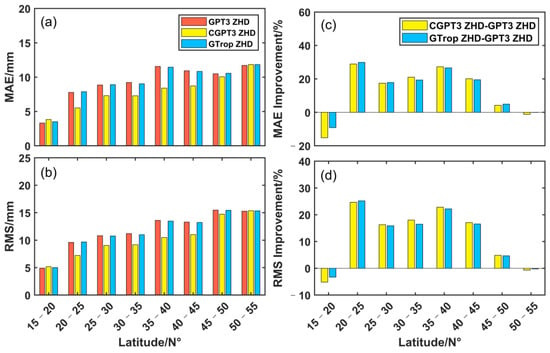
Figure 5.
Variation of MAE and RMS with latitude (a,b) and improvement rates of the absolute values of MAE and RMS (c,d) of ZHD derived from the three models.
The variations in MAE and RMS with height for the three models are shown in Figure 6. The MAE and RMS of the three models increased with height within 1 km and decreased over 1 km, with the CGPT3 model showing better performance among the three models. The improvement in MAE and RMS of CGPT3 models in comparison with the other two models was significant, and the improvement rates are shown in Figure 6c,d. Within 0.1~5.5 km, MAE and RMS were improved by 10%~30% as compared to the GTrop model. This improvement in accuracy would be beneficial to acquiring more accurate ZHDs in China, where the height varies greatly and is high in the west and low in the east.
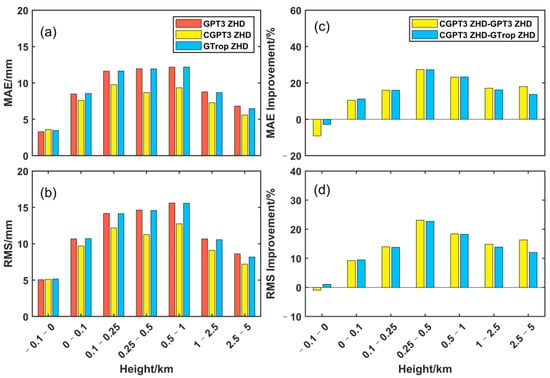
Figure 6.
Variation of MAE and RMS with height (a,b) and improvement rates of the absolute values of MAE and RMS (c,d) of ZHD derived from the three models.
The spatial daily mean MAE and RMS of the three models were computed to better estimate the performance of the models in different seasons (see Figure 7). The MAE and RMS trends of the three models have a significant agreement between the MAE/RMS. However, among the four seasons, the MAE/RMS of the CGPT3 model was the smallest, indicating its best performance in monitoring ZHD compared to the other two models. This ascendancy should be due to the CGPT3 model considering the diurnal variation of the GPT3 ZHD residuals, so it can better capture the diurnal variation of ZHD. Figure 8 displays the time series of the CGPT3-/GPT3-/GTrop- and RS-derived ZHD at four representative locations in 2017 to demonstrate the superiority in the accuracy of the CGPT3 model results from accounting for the diurnal variations in the GPT3 ZHD residuals. The four sites were selected from the eastern (HOTAN), western (FUKUOKA), southern (VINH), and northern (KRASNYJCHIKOJ) parts of the study area. ZHD is somewhat influenced by altitude and ocean [38,42], so the western HOTAN site, located on the Qinghai-Tibetan plateau within mainland China, and the FUKUOKA site in the coastal area were selected. VINH and KRASNYJCHIKOJ are located at low and mid–high latitudes, respectively, where VINH is in the tropics with more precipitation and abundant water vapor content, while KRASNYJCHIKOJ is located in the interior of the continent with a temperate continental climate and lower precipitation. The GTrop and CGPT3 models were better able to depict the overall RS trend since the GPT3 ZHD at the HOTAN locations is larger than the RS ZHD. In particular, the CGPT3 ZHD curve had a more extensive range of variation than other ZHD curves, making it better able to display ZHD variation other than the annual and semi-annual variation and display the best RS ZHD agreement. The ZHD of CGPT3/GPT3/GTrop of the other three sites had good agreement with the general trend of RS ZHD. However, the range of variation was significantly larger in CGPT3 ZHD and captured the variation of ZHD frequency better than the annual and semi-annual variations. This is because, unlike the other two models, CGPT3 simulates the diurnal variations of ZHD residuals of GPT3 ZHD, in addition to the annual and semi-annual variation. Overall, the CGPT3 model outperformed the other two models and was more stable throughout the entire year of 2017.
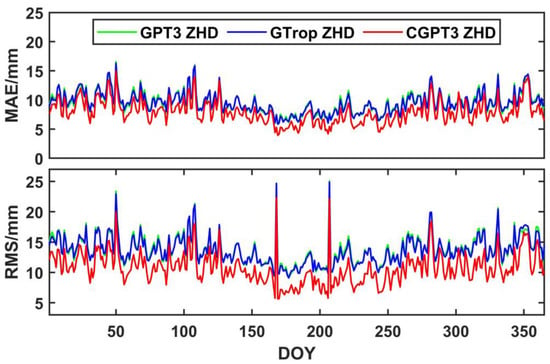
Figure 7.
Daily average MAE and RMS variation of ZHD derived from the three models.
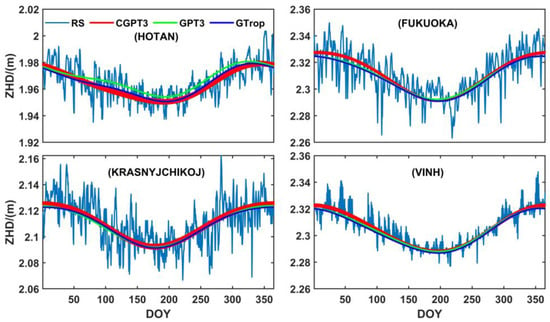
Figure 8.
ZHD sequence of the three models and RS at HOTAN, FUKUOKA, KRASNYJCHIKOJ, and VINH sites in 2017.
5. Conclusions and Outlook
The present paper used FFT to analyze the time series of the GPT3 ZHD residuals in the Chinese mainland and its surrounding areas and assessed the annual, semi-annual, and diurnal variations in the residuals. Further, a specific site-calibrated model named CGPT3 was developed for GPT3 ZHD. The validation based on modeling data showed that the MAE and RMS of the CGPT3 models were 7.3 and 9.6 mm, respectively, which represent improvements of 17.0% and 15.0%, respectively, in comparison with GPT3 models. The verification using the data not used in the modeling indicated that the MAE and RMS of CGPT3 were 7.9 and 10.2 mm, respectively. Moreover, the CGPT3 model MAE and RMS were optimized by 16.8%/16.8% and 13.6%/14.3%, respectively, in comparison to the approved GPT3 model and the recently announced GTrop model, showing significant improvements in accuracy. The analysis of the spatiotemporal characteristics of the accuracy also showed that the new model has more prominent accuracy advantages and better stability across the range of spatiotemporal domains. In summary, the CGPT3 outperformed the other two models and can be applied to provide ZHD for both GNSS/VLBI postprocessing and GNSS PWV inversion at specific sites and the sites within areas for the co-location. In the follow-up research, the clarified model parameters will attempt to be stored in the form of a grid to develop a new model that can be used in the region for any location in the study area.
Author Contributions
Conceptualization, J.L.; methodology, J.L.; software, F.L.; validation, J.L. and F.L.; formal analysis, J.L. and F.L.; investigation, F.L.; resources, J.L., L.L., L.H., L.Z. and H.H.; data curation, J.L. and F.L.; writing—original draft preparation, J.L. and F.L.; writing—review and editing, L.L., L.H., L.Z. and H.H.; visualization, F.L.; supervision, L.L., L.H., L.Z. and H.H.; project administration, L.L.; funding acquisition, L.L. and H.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Guangxi Natural Science Foundation of China (2020GXNSFBA297145), the Foundation of Guilin University of Technology (GUTQDJJ6616032), Guangxi Key Laboratory of Spatial Information and Geomatics (21-238-21-05), the National Natural Science Foundation of China (42064002, 41864002, 42004025, 42074035), and the Innovative Training Program Foundation (202210596015, 202210596402).
Data Availability Statement
Radiosonde data can be downloaded from the Integrated Global Radiosonde Archive (IGRA) at https://www.ncei.noaa.gov/pub/data/igra/ (accessed on 12 December 2021). The MATLAB source code of the GPT3 and GTrop models can be found at https://vmf.geo.tuwien.ac.at/codes/ and https://github.com/sun1753814280/GTrop (accessed on 14 October 2021 and 2 February 2022 ), respectively.
Acknowledgments
The authors would like to thank the Integrated Global Radiosonde Archive (IGRA) for providing radiosonde data (https://www.ncei.noaa.gov/pub/data/igra/ (accessed on 12 December 2021)). We also thank Zhangyu Sun for providing the MATLAB source code of the GTrop model at https://github.com/sun1753814280/GTrop (accessed on 2 February 2022), as well as the VMF Data Server for providing the GPT3 model (https://vmf.geo.tuwien.ac.at/codes/ (accessed on 14 October 2021)).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by Radio Interferometry: Effects of Atmospheric Modeling Errors on Estimates of Baseline Length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Lu, C.; Li, X.; Zus, F.; Heinkelmann, R.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Improving BeiDou Real-Time Precise Point Positioning with Numerical Weather Models. J. Geod. 2017, 91, 1019–1029. [Google Scholar] [CrossRef]
- Rahimi, Z.; Mohd Shafri, H.Z.; Othman, F.; Norman, M. Effect of Tropospheric Models on Derived Precipitable Water Vapor over Southeast Asia. J. Atmos. Sol. Terr. Phys. 2017, 157–158, 55–66. [Google Scholar] [CrossRef]
- Tregoning, P.; Herring, T.A. Impact of a Priori Zenith Hydrostatic Delay Errors on GPS Estimates of Station Heights and Zenith Total Delays. Geophys. Res. Lett. 2006, 33, L23303. [Google Scholar] [CrossRef]
- Arief, S.; Heki, K. GNSS Meteorology for Disastrous Rainfalls in 2017–2019 Summer in SW Japan: A New Approach Utilizing Atmospheric Delay Gradients. Front. Earth Sci. 2020, 8, 182. [Google Scholar] [CrossRef]
- Hordyniec, P.; Bosy, J.; Rohm, W. Assessment of Errors in Precipitable Water Data Derived from Global Navigation Satellite System Observations. J. Atmos. Sol. Terr. Phys. 2015, 129, 69–77. [Google Scholar] [CrossRef]
- Singh, D.; Ghosh, J.; Kashyap, D. Development of a Site-Specific ZHD Model Using Radiosonde Data. Acta Geod. Geophys. Hung. 2012, 47, 90–100. [Google Scholar] [CrossRef]
- Hopfield, H.S. Tropospheric Effect on Electromagnetically Measured Range: Prediction from Surface Weather Data. Radio Sci. 1971, 6, 357–367. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the Theory of Atmospheric Refraction. Bull. Geod. 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Collins, J.P.; Langley, R.B. A Tropospheric Delay Model for the User of the Wide Area Augmentation System; Final Contract Report for Nav Canada, Department of Geodesy and Geomatics Engineering Technical Report No. 187; University of New Brunswick: Fredericton, NB, Canada, 1997. [Google Scholar]
- Leandro, R.F.; Langley, R.B.; Santos, M.C. UNB3m_pack: A Neutral Atmosphere Delay Package for Radiometric Space Techniques. GPS Solut. 2008, 12, 65–70. [Google Scholar] [CrossRef]
- Krueger, E.; Schueler, T.; Arbesser-Rastburg, B. The Standard Tropospheric Correction Model for the European Satellite Navigation System Galileo. Proc. General Assembly URSI. 2005, 23–29. [Google Scholar]
- Schüler, T. The TropGrid2 Standard Tropospheric Correction Model. GPS Solut. 2014, 18, 123–131. [Google Scholar] [CrossRef]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short Note: A Global Model of Pressure and Temperature for Geodetic Applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Lagler, K.; Schindelegger, M.; Böhm, J.; Krásná, H.; Nilsson, T. GPT2: Empirical Slant Delay Model for Radio Space Geodetic Techniques. Geophys. Res. Lett. 2013, 40, 1069–1073. [Google Scholar] [CrossRef]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an Improved Empirical Model for Slant Delays in the Troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined Discrete and Empirical Troposphere Mapping Functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Li, L.; Wu, S.; Zhang, K.; Wang, X.; Li, W.; Shen, Z.; Zhu, D.; He, Q.; Wan, M. A New Zenith Hydrostatic Delay Model for Real-Time Retrievals of GNSS-PWV. Atmos. Meas. Tech. 2021, 14, 6379–6394. [Google Scholar] [CrossRef]
- Yang, F.; Guo, J.; Li, J.; Zhang, C.; Chen, M. Assessment of the Troposphere Products Derived From VMF Data Server With ERA5 and IGS Data Over China. Earth Space Sci. 2021, 8, e2021EA001815. [Google Scholar] [CrossRef]
- Kim, E.-H.; Lee, E.; Lee, S.-W.; Lee, Y.H. Characteristics and Effects of Ground-Based GNSS Zenith Total Delay Observation Errors in the Convective-Scale Model. J. Meteorol. Soc. Jpn. 2019, 97, 1009–1021. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Wang, A.; Ding, J.; Zhang, Y. SHAtropE—A Regional Gridded ZTD Model for China and the Surrounding Areas. Remote Sens. 2020, 12, 165. [Google Scholar] [CrossRef]
- Yu, C.; Li, Z.; Blewitt, G. Global Comparisons of ERA5 and the Operational HRES Tropospheric Delay and Water Vapor Products With GPS and MODIS. Earth Space Sci. 2021, 8, e2020EA001417. [Google Scholar] [CrossRef]
- Mao, J.; Wang, Q.; Liang, Y.; Cui, T. A New Simplified Zenith Tropospheric Delay Model for Real-Time GNSS Applications. GPS Solut. 2021, 25, 43. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; He, C.; Cheng, Y.; Li, X. Determination of Zenith Hydrostatic Delay and Its Impact on GNSS-Derived Integrated Water Vapor. Atmos. Meas. Tech. 2017, 10, 2807–2820. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, B.; Li, J.; Yao, Y.; Liu, L.; Ran, Q.; Xiong, Z. A Regional Model for Predicting Tropospheric Delay and Weighted Mean Temperature in China Based on GRAPES_MESO Forecasting Products. Remote Sens. 2021, 13, 2644. [Google Scholar] [CrossRef]
- Wang, H.S.; Shi, C.; Cao, Y.C. Analysis of Regional Distribution and Change of Tropospheric Delay. AMM 2014, 577, 1189–1192. [Google Scholar] [CrossRef]
- Huang, L.; Wang, X.; Xiong, S.; Li, J.; Liu, L.; Mo, Z.; Fu, B.; He, H. High-Precision GNSS PWV Retrieval Using Dense GNSS Sites and in-Situ Meteorological Observations for the Evaluation of MERRA-2 and ERA5 Reanalysis Products over China. Atmos. Res. 2022, 276, 106247. [Google Scholar] [CrossRef]
- Huang, L.; Zhu, G.; Liu, L.; Chen, H.; Jiang, W. A Global Grid Model for the Correction of the Vertical Zenith Total Delay Based on a Sliding Window Algorithm. GPS Solut. 2021, 25, 98. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. A Comprehensive Evaluation and Analysis of the Performance of Multiple Tropospheric Models in China Region. IEEE Trans. Geosci. Remote Sens. 2016, 54, 663–678. [Google Scholar] [CrossRef]
- Chen, P.; Ma, Y.; Liu, H.; Zheng, N. A New Global Tropospheric Delay Model Considering the Spatiotemporal Variation Characteristics of ZTD With Altitude Coefficient. Earth Space Sci. 2020, 7, e2019EA000888. [Google Scholar] [CrossRef]
- Zhang, W.; Lou, Y.; Cao, Y.; Liang, H.; Shi, C.; Huang, J.; Liu, W.; Zhang, Y.; Fan, B. Corrections of Radiosonde-Based Precipitable Water Using Ground-Based GPS and Applications on Historical Radiosonde Data Over China. J. Geophys. Res. Atmos. 2019, 124, 3208–3222. [Google Scholar] [CrossRef]
- Li, T.; Wang, L.; Chen, R.; Fu, W.; Xu, B.; Jiang, P.; Liu, J.; Zhou, H.; Han, Y. Refining the Empirical Global Pressure and Temperature Model with the ERA5 Reanalysis and Radiosonde Data. J. Geod. 2021, 95, 31. [Google Scholar] [CrossRef]
- Miranda, P.M.A.; Mateus, P. Improved GNSS Water Vapor Tomography With Modified Mapping Functions. Geophys. Res. Lett. 2022, 49, e2022GL100140. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System. J. Geophys. Res. 1992, 97, 15787. [Google Scholar] [CrossRef]
- Vedel, H.; Mogensen, K.S.; Huang, X.-Y. Calculation of Zenith Delays from Meteorological Data Comparison of NWP Model, Radiosonde and GPS Delays. Phys. Chem. Earth Part A Solid Earth Geod. 2001, 26, 497–502. [Google Scholar] [CrossRef]
- Xie, W.; Huang, G.; Fu, W.; Shu, B.; Cui, B.; Li, M.; Yue, F. A Quality Control Method Based on Improved IQR for Estimating Multi-GNSS Real-Time Satellite Clock Offset. Measurement 2022, 201, 111695. [Google Scholar] [CrossRef]
- Zhao, Q.; Ma, X.; Yao, W.; Liu, Y.; Yao, Y. A Drought Monitoring Method Based on Precipitable Water Vapor and Precipitation. J. Clim. 2020, 33, 10727–10741. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, B.; Yao, Y. A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017. Remote Sens. 2019, 11, 1893. [Google Scholar] [CrossRef]
- Dilmaghani, S.; Henry, I.C.; Soonthornnonda, P.; Christensen, E.R.; Henry, R.C. Harmonic Analysis of Environmental Time Series with Missing Data or Irregular Sample Spacing. Environ. Sci. Technol. 2007, 41, 7030–7038. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Yao, Y. A New Method for Vertical Stratification of Zenith Tropospheric Delay. Adv. Space Res. 2019, 63, 2857–2866. [Google Scholar] [CrossRef]
- Li, J.; Zhang, B.; Yao, Y.; Liu, L.; Sun, Z.; Yan, X. A Refined Regional Model for Estimating Pressure, Temperature, and Water Vapor Pressure for Geodetic Applications in China. Remote Sens. 2020, 12, 1713. [Google Scholar] [CrossRef]
- Jin, S.; Park, J.-U.; Cho, J.-H.; Park, P.-H. Seasonal Variability of GPS-Derived Zenith Tropospheric Delay (1994–2006) and Climate Implications. J. Geophys. Res. 2007, 112, D09110. [Google Scholar] [CrossRef]
- Du, Z.; Zhao, Q.; Yao, W.; Yao, Y. Improved GPT2w (IGPT2w) Model for Site Specific Zenith Tropospheric Delay Estimation in China. J. Atmos. Sol. Terr. Phys. 2020, 198, 105202. [Google Scholar] [CrossRef]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere Mapping Functions for GPS and Very Long Baseline Interferometry from European Centre for Medium-Range Weather Forecasts Operational Analysis Data: TROPOSPHERE MAPPING FUNCTIONS FROM ECMWF. J. Geophys. Res. 2006, 111, B02406. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).