2.1. Pinhole Model and Image Distorition Compensation: Background Theory
The pinhole camera model considers a central projection using the optical center of the camera and an image plane (that is perpendicular to the camera’s optical axis [
6]). This model represents every 3D world point P (expressed by world coordinates
,
,
) by the intersection between the image plane and the camera ray line that connects the optical center with the world point P (this intersection is called the image point). The pinhole camera projection can be described by the following linear model:
K is the calibration matrix [
7], defined as follows:
and
represent, respectively, the focal length and the focal length affected by the compression effect in the ν axis expressed in pixels.
and
are the coordinates of the principal point, which is normally a few pixels displaced from the image center, with the origin in the upper left corner.
is the skew coefficient between the x and y axis. This latter parameter is very often 0. The focal length can also be expressed in metric terms (e.g., mm instead of pixels) considering the following expressions:
and
are, respectively, the image width and length expressed in pixels,
is the width and
the length of the camera sensor expressed in world units (e.g., mm). Usually,
and
have the same value, although they may differ due to several reasons such as flaws in the digital camera sensor or when the lens compresses a widescreen scene into a standard-sized sensor. In this paper, we will assume that
=
and
=
. R and T in (1) are the rotation and translation matrices of the camera, respectively, in relation to the world coordinate system. These include the extrinsic parameters which define the so-called “camera pose”. R is defined, in this case, by the angles around the axes (X, Y, and Z) of the World Coordinate System needed for rotating the image coordinate system axes in order to get them coincident (or parallel) with the world coordinate system axes. In the case of rotation around the X axis by an angle θ
x, the rotation matrix R
x is given by (5) [
7]:
Rotations by θ
y and θ
z about the Y and Z axes can be written as:
A rotation R about any arbitrary axis can be written in terms of successive rotations about the X, Y, and finally Z axes, using the matrix multiplication shown in (8). In this formulation θ
x, θ
y and θ
z are the Euler angles.
T is expressed by a 3-dimensional vector that defines the position of the camera against the origin of the world coordinate system. Scaling does not take place in the definition of the camera pose. Enlarging the focal length or sensor size provides the scaling.
The pinhole model does not consider that real lenses may produce several different non-linear distortions. The major defects in cameras is radial distortion, caused by light refraction differences along with the spherical shape of the lens [
8]. Other distortions, like the tangential distortion, which is generated when the lens is not parallel to the imaging sensor or when several component lenses are not aligned over the same axis, have minor relevance in quality objectives and are not relevant for this study. The radial distortions can usually be classified as either barrel distortions or pincushion distortions, which are quadratic, meaning they increase as the square of the distance from the center. Removing a distortion means obtaining an undistorted image point, which can be considered as projected by an ideal pinhole camera, from a distorted image point. The correction can take place by taking into consideration radial distortion coefficients, which are specific to the lens under analysis. Please refer to other studies for a complete description of this well-known process [
3,
8]. Finally, it is necessary to underline that the radial shift of coordinates modifies only the distance of every pixel from the image center. Thus, to sensibly reduce processing time, it is possible to remove the distortion of only specific pixels [
8] without necessarily performing the correction of the entire image.
2.2. Target Height Estimation Using Gimballed Cameras Mounted in UAVs
The camera is usually fitted into steerable gimbals, which may have the freedom to move around one, two or even three axes (which would be formalistically called one-gimbal, two-gimbal or three-gimbal configurations, [
9]). In those cases where the gimbal has limited degrees of freedom, further steering capacity for the camera must be provided by the UAV itself via flight rotations. The parameters required for the transformation from the world coordinate system to the camera coordinate system (extrinsic parameters) can be obtained from positioning measurements (latitude, longitude, and elevation) and Euler angles (yaw, pitch, and roll). Regular GPS receivers, which are not subject to enhancements such as differential positioning, may be affected by a relevant positional error, especially in elevation. On the other hand, the orientation angles are measured by sensitive gyroscopes, which usually have a reasonably good relative accuracy [
10]. Positioning systems, gyroscopes, and accelerometers are used by the IMU (Inertial Measurement Unit) which are essential components for the guidance and control of UAVs [
9]. The camera can be oriented to have the target centered in the image plane, this is a common practice in UAV operations because usually supported by dedicated detection and tracking algorithms [
11]. Each still image acquired by the UAV is usually accompanied by a set of camera and UAV flight information, stored as metadata. The amount of information stored varies from system to system. Advanced imaging equipment may provide a complete set of metadata in KLV (Key-Length-Value) format in accordance with MISB (Motion Imagery Standards Board) standards [
12]. Lightweight UAVs available in the regular market are not always fitted with such advanced devices but, very often, are capable to store a minimum set of metadata, which includes onboard positioning coordinates, flight orientation, and camera orientation.
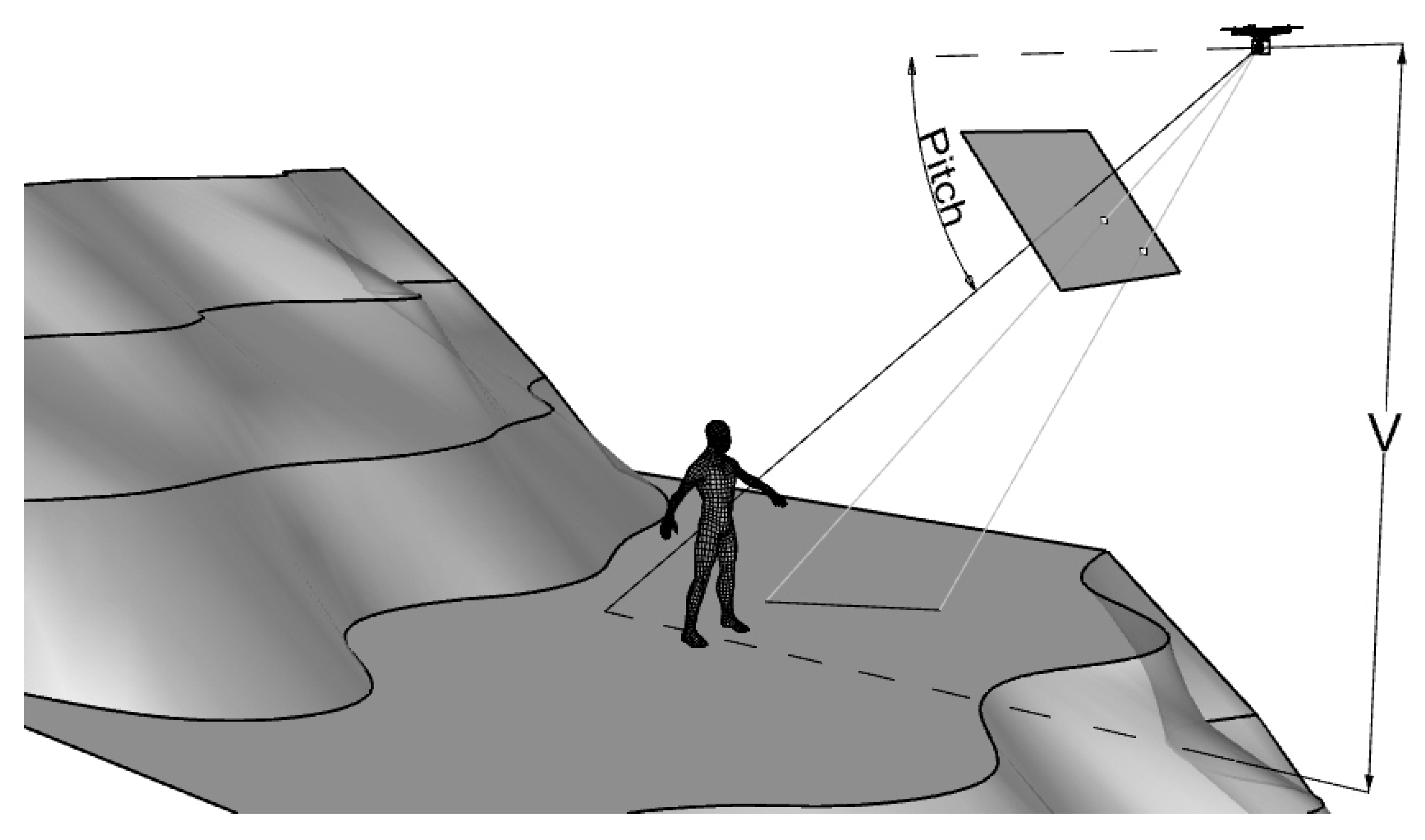
Estimating the height of a vertical target using a pinhole model and how it can be performed considering the case of UAV has been already treated in [
3]. The camera must be centered on the target. The procedure requires the following parameters: camera-to-target distance, focal length, Pitch angle, pixels spanning upward from the image principal point
and downward
(which are respectively the distance of the undistorted image coordinates from the center of the points representing the top and the bottom of the target, the exact center of the image can therefore be an arbitrary pointing along with the target). The camera-to-target distance can be expressed by either horizontal distance (H) or vertical relative distance (V) in function of the Pitch angle, see
Figure 1. With the mentioned parameters available, the height of the target can be estimated using simple trigonometric calculations, whose detailed description can be found in [
3].
If the coordinates of the target and the coordinates of the aerial camera are known, then H and V are also known. Unfortunately, this theoretical approach does not work practically because of the low positional accuracy of the drones and the uncertainty in the position of a moving target like a human.
The next section describes a novel method to retrieve the height difference between the target and the camera center (V), considering only a horizontal distance between two points visible in the image.
2.3. Approach to Retrieve Height Difference between the Target and the Camera Center
As discussed in the previous section, the estimation of the target height requires to know the relative vertical position of the UAV regarding the target. Theoretically, this can be easily done by subtracting the elevation of the UAV and the elevation of the point where the target is. In urban areas, it is often possible to find the exact altitude of the target (the elevation of squares or streets is often well known). The problem lies in the accuracy related to the position of the UAVs: consumer-level aircraft do not reach a sufficient level of accuracy for the scope of estimating the target height (e.g., Phantom 4 PRO used in this research has a vertical uncertainty of ±0.5). It is here proposed a novel approach to retrieve V using only the horizontal distance between two points visible in the image. No need for GPS coordinates or other geospatial information, just a regular length expressed in meters.
Figure 2 shows the concept: the ground distance between two points visible in the image should be available (the coordinates of the points on the ground are not needed). This length can be of any dimension (if it is recognizable in the image) and oriented in any spatial direction, but it must be planar and at the same elevation as the target. Therefore, it should be either close to a target located in an uneven area or even farther, if the target is in a flat area (e.g., an open square). The parameter V, which represents, in this case, the height difference between the horizontal plane where the length lies and the center of the camera can be calculated by only knowing the image coordinates of the points, pitch and roll of the camera, and ground distance between the two points. No other info is required. This very limited amount of information is enough to calculate V because, as shown in
Figure 1, it is not necessary to handle real-world coordinates: a local coordinate system with the origin arbitrarily located in the camera center and oriented is enough.
To explain how V can be calculated, let us assume that the camera is in an initial state comparable to the inertial frame (θ
x = θ
y = θ
z = 0, see
Section 2.1) with the origin of the local coordinate system in the camera center. The center point of the image plane c has image coordinates equal to
and
but, considering the local system defined above, the coordinates (x
c, y
c, z
c) of this point would be (see
Figure 3):
where
is the focal length expressed in pixels.
Let us now consider a generic point p in the image plane of coordinates
and
. The coordinates (x
p, y
p, z
p) of this point in the local system can be retrieved as follow:
We want now to define the position of the point p in the local coordinate systems after the rotations defined by Euler angles. As shown in
Figure 1 and
Figure 2, the θ
z (yaw angle) is always equal to zero. Thus, the position of the point p remains unchanged, as well as the orientation of the image plane and the position of the center c. The rotation of the coordinates of the point p due to Pitch (θ
y) can be then calculated using R
y (see Equation (6) and
Figure 3a,b).
The coordinates of the point p′ after rotation due to pitch (x′
p, y′
p, z′
p) can be then calculated as follow:
Similarly, it is possible to retrieve the coordinates of the image center c′ after Pitch rotation (x′c, y′c, z′c).
It is now necessary to apply the rotation due to Roll angle (θ
x) to finally determine the position of the point p″ in the defined local coordinate system after the necessary camera rotations. However, in this case, it is not possible to simply multiply the coordinates of the point p′ by the matrix R
x (see Equation (5)) because the axis along with the Roll rotation takes place (O-c′) is no longer aligned with the axis of the local coordinate system (see
Figure 3c). In this case, it is necessary to apply a rotation along the axis O-c′ using the following sequence of rotations T (see [
13] and [
14] for further details):
where:
The coordinates of the point p″ (see
Figure 3c) are therefore given as:
Let us now consider
Figure 4, where a and b are image points whose coordinates in the local coordinates system are (x
a, y
a, z
a) and (x
b, y
b, z
b)—these coordinates can be defined according to the procedure described above. The plane
, in analogy with
Figure 2, is the horizontal surface where the target lies. The point O, as extensively discussed, is the camera center which is considered here as the origin of the local coordinate system (0, 0, 0). The point Z, that lies on the plane
, is defined by the coordinates (0, 0,
)—
is the height of the camera from the plane
. A and B are points lying on the plane
. Their coordinates are not known but as already pointed out, the distance AB is a known parameter that needs to be converted in pixels.
We remind that the plane
, can be expressed by the following parametric equation:
where c and d are coefficients belonging to
, and the points A and B can be given as follow:
where
and
are scalar coefficients,
(x
a, y
a, z
a), and
(x
b, y
b, z
b). The goal of this approach is to calculate
, which is the value required to calculate the height of the target (expressed with the symbol V in
Figure 2), by knowing the distance AB, beside camera Pitch, Roll, image coordinates of the points a and b and intrinsic camera parameters.
We propose the following approach to retrieve the value of .
Let us consider another horizontal plane
passing for one of the two points in the image plane, let’s say the point a in this case (see
Figure 5a).
The point Z1 has coordinates equal to (0, 0,
) but
is equal to
, since the point Z1 and the point a are lying on the same horizontal plane
. Therefore, the parametric equation of the plane
is given as follows:
As seen before, c and d are coefficients belonging to .
Let’s now consider the point b’ (intersection of the vector
and the plane
, see
Figure 5b). The coordinates of this point can be calculated as follow:
Since the point b′ and the point a are lying in the same horizontal plane we can state that:
And so, we can retrieve the parameter
Now that the scalar coefficient
is known, the coordinates of the point b′ can be calculated and used to retrieve the distance a-b′ (
and
are equal and therefore not considered in the equation below):
The triangle a-b′-Z1 and the triangle A-B-
are homologous (see
Figure 5c,d). Considering that Z1 = (0, 0,
and Z = (0, 0,
we can therefore say that
Since AB is a known parameter and we managed to retrieve ab′ in the Equation (29), we can now finally calculate . This value, as mentioned already, can be used to calculate the height of the target.
2.4. Uncertainty Analysis
In this section, we analyze the error associated with the calculation of V taking into consideration the possible uncertainty of the parameters involved in the calculation. After this, the error generated in the calculation of V will be considered in the estimation of the target height.
Assuming an accurate correction of the distortion, the major source of relevant error may come from the pixel counting, the length of the straight line on the ground, and the pitch angle. To better analyze how the error may vary, 15 cases with different camera orientations (pitch values equal to 20, 25, 39.1, 45, and 60), distance of the line from the center of the image, and ground lengths were created using a spreadsheet. These cases (artificially created) gave us the possibility to have full control over all the parameters in order to isolate and analyze each uncertainty and calculate their combination. The results of this analysis are reported in
Table 1.
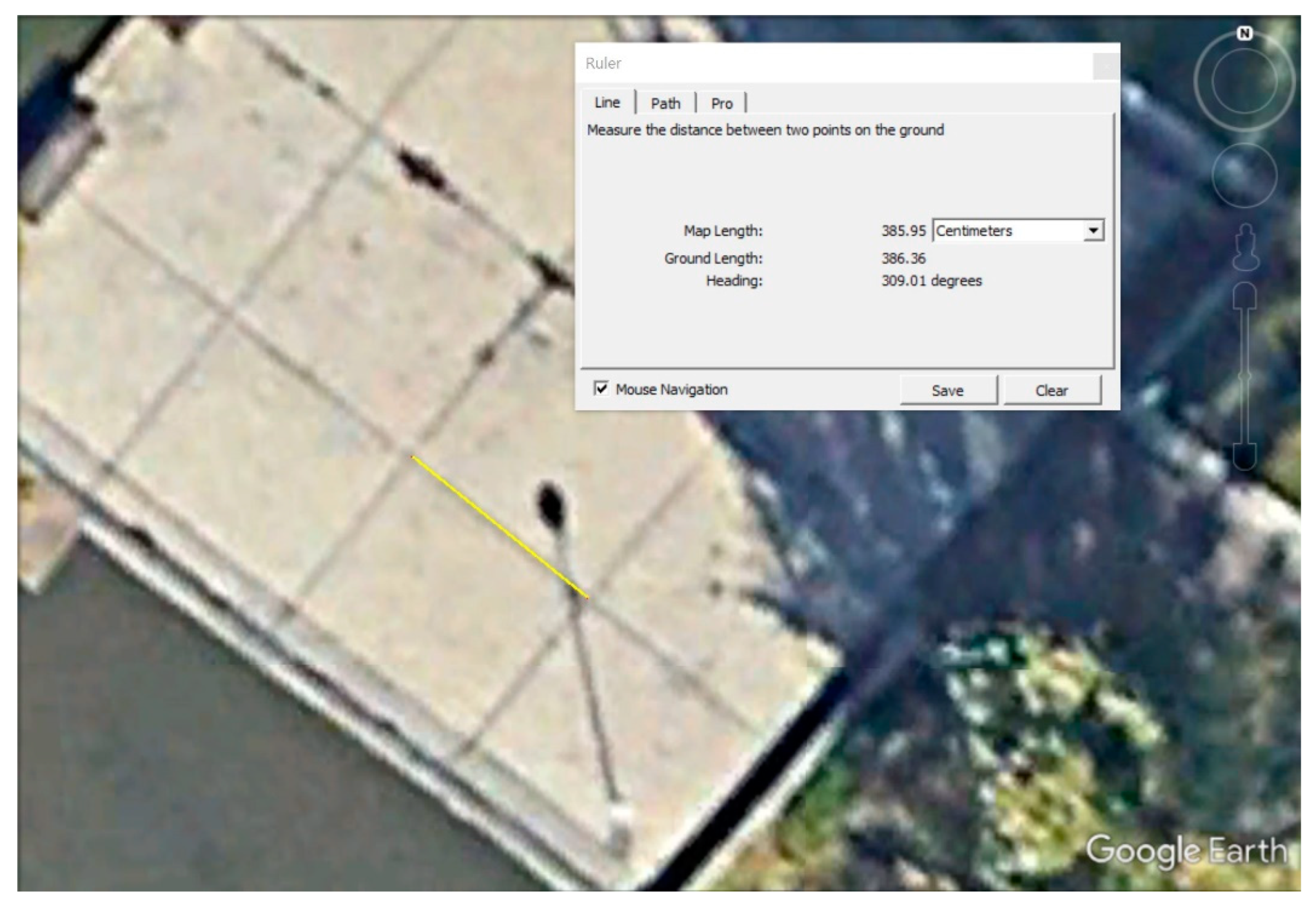
It was considered an error of ±1 pixel associated with the coordinates of the image point as well as ±1 pixel for the coordinates of the image point b. Regarding the accuracy related to the length of the line on the ground, three scenarios were considered: ±0.01 m, which is considered the case of measures accurately taken on the ground with a measuring tape; ±0.05 m, which is considered the case when the measures are taken on the ground with a measuring tape but we are less confident regarding their quality; ±0.50 m, which is the indicative value when the measure is not taken directly on the ground, but it is directly obtained from ortho-imagery or other sources like Google Earth [
15]. Finally, an uncertainty of ±0.50° associated with the Pitch angles was deemed appropriate. The uncertainty associated with pixel position and error associated with ground length were combined considering the error propagation law:
where
denotes the error;
is the real V;
is the calculated vertical camera-to-target distance when the length has the indicated uncertainty (0.01 m, 0.05 m and 0.5 m respectively);
is the uncertainty associated with the position of the image points a and b (1 pixel for a and 1 pixel for b, 2 pixels in total);
.is the uncertainty associated with the pitch angle (± 0.50°).
Table 1 also reports the calculation of V considering the mentioned uncertainties and the derived statistical error. Please note that for the three statistical errors (when length uncertainty is 1 cm, 5 cm, and 50 cm), the pixel uncertainty and pitch uncertainty would remain always the same.
The “Statistical error considering the uncertainty of Pitch angle” in
Table 1 shows that the impact of error associated with the Pitch angle is rather relevant, in some cases comparable to a ground length error of 50 cm. This error increases substantially for low angles and when the distance from the ground is higher (i.e., higher V). While it would be reasonable to expect a systematic error in the measurement of the Pitch angle (especially when using consumer-level drones), the tests conducted did not often show errors clearly linked to erroneous pitch. However, this may randomly happen, and it should be taken into due consideration (see the next section for further analysis in this regard). A possible explanation might be that air surveillance is usually conducted in manual mode and the drone is usually hovering when a picture is taken to keep the target in the center. This approach might let the IMU stabilize and collect accurate pitch values (just a supposition that needs to be confirmed).
Considering the above, it is interesting to analyze the behavior of the statistical error considering only the other two variables (pixels and accuracy of the ground distance’s length), which is indicated as “Statistical error without the uncertainty of Pitch angle” in
Table 1. The line from the image center (Defined as Euclidian distance from the center of the line to the center of the image), ground length, length of the line in pixels) against the statistical error were plotted against this error (see
Figure 6). It can be noted that the error increases when the real V and Pitch are increasing (
Figure 6a,b), while the error decreases with ground length (
Figure 6c) and, apparently, it does not have a clear pattern when considering the distance from the center (
Figure 6d). The most interesting plot is the length in pixels vs. statistical error (1 cm,
Figure 6e), which shows a clear pattern: a length in pixels smaller than 100 results in a larger error, above 100 the error gets smaller and after 300 pixels it is constantly below 0.7 cm. The same behavior is also observed when the length in pixels is plotted against the statistical error (5 cm,
Figure 6f): values of length (in pixels) smaller than 100 show a larger error, above 100 the error gets smaller and after 300 pixels the error is constantly below 0.7 cm. The same behavior is also shown for the 50 cm error (
Figure 6g), but in this case, as expected, after 300 pixel-length the error does not get below 62 cm, while it reaches 13 cm for a length of almost 4000 pixels. To give an idea, a line of 70 cm on the ground generates a line of 300 pixels in the image plane when the UAV is at 3 m with a Pitch of 39 deg, while a line of 25 m is needed when the UAV is at 40 m.
Let us now consider the uncertainty associated with the estimation of the target’s height. As seen for the case above, a spreadsheet can be used to generate artificially 20 cases with a random position of the UAV looking at a vertical target (e.g., a pole) of 1.80 m. We can have full control over all the parameters to isolate and analyze each uncertainty associated with pixels and V. The position of the UAV with respect to the target ranges from 5 m to 50 m (horizontal distance from the target) and the camera pitch angle ranges between 5 deg to 75 deg. Two cases were considered: uncertainty associated with V equal to 0.05 m and uncertainty associated with V equal to 0.1 m. In both cases, the statistical error was generated considering an uncertainty of ±1 pixel in the counting of the pixels spanning the feature from the center to the bottom and ±1 pixel from the center to the top (2 pixels in total) and the uncertainty related to pitch (±0.50°). The statistical error was calculated considering Equation (30). However, taking into account the hypothesis that the error associated with the Pitch angle is not systematic, a statistical error considering Pitch uncertainty and without Pitch uncertainty was calculated. The results of this analysis are reported in
Table 2. First, it is possible to appreciate that the Pitch error may prevent very accurate estimation, especially for low Pitch values and longer distances to the target. When the pitch error is not present, the error in the estimation of the target height will be 0.03 cm maximum V uncertainty of 5 cm, and 0.05 m maximum when the uncertainty of V is 0.1 m.
Let us now analyze the overall uncertainty in practical terms. According to the graphs in
Figure 6, if we know the ground length of the line with an uncertainty of 0.01 m (i.e., measured on the ground), then any line with a length bigger than 250 pixels in the image plane could be used to estimate the height with an uncertainty of less than 0.03 m. If the uncertainty of the ground length is 0.05 m, then any line with length bigger than 300 pixels in the image plane could be used to estimate the height with an uncertainty of less than 0.05 m. Even if the uncertainty of ground length would be 0.5 m, it would be still possible to estimate the height of the target with reasonable accuracy (less than 5 cm) if the length of the line in pixels is longer than 4800 pixels. All this without considering the impact of the Pitch error. However, assuming once again that we may have a random error in the measurement of the Pitch angle, acquiring multiple images may mitigate its impact, as shown in the following section.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}