
Coral Reef Benthos Classification Using Data from a Short-Range Multispectral Sensor



Abstract
1. Introduction
2. Materials and Methods
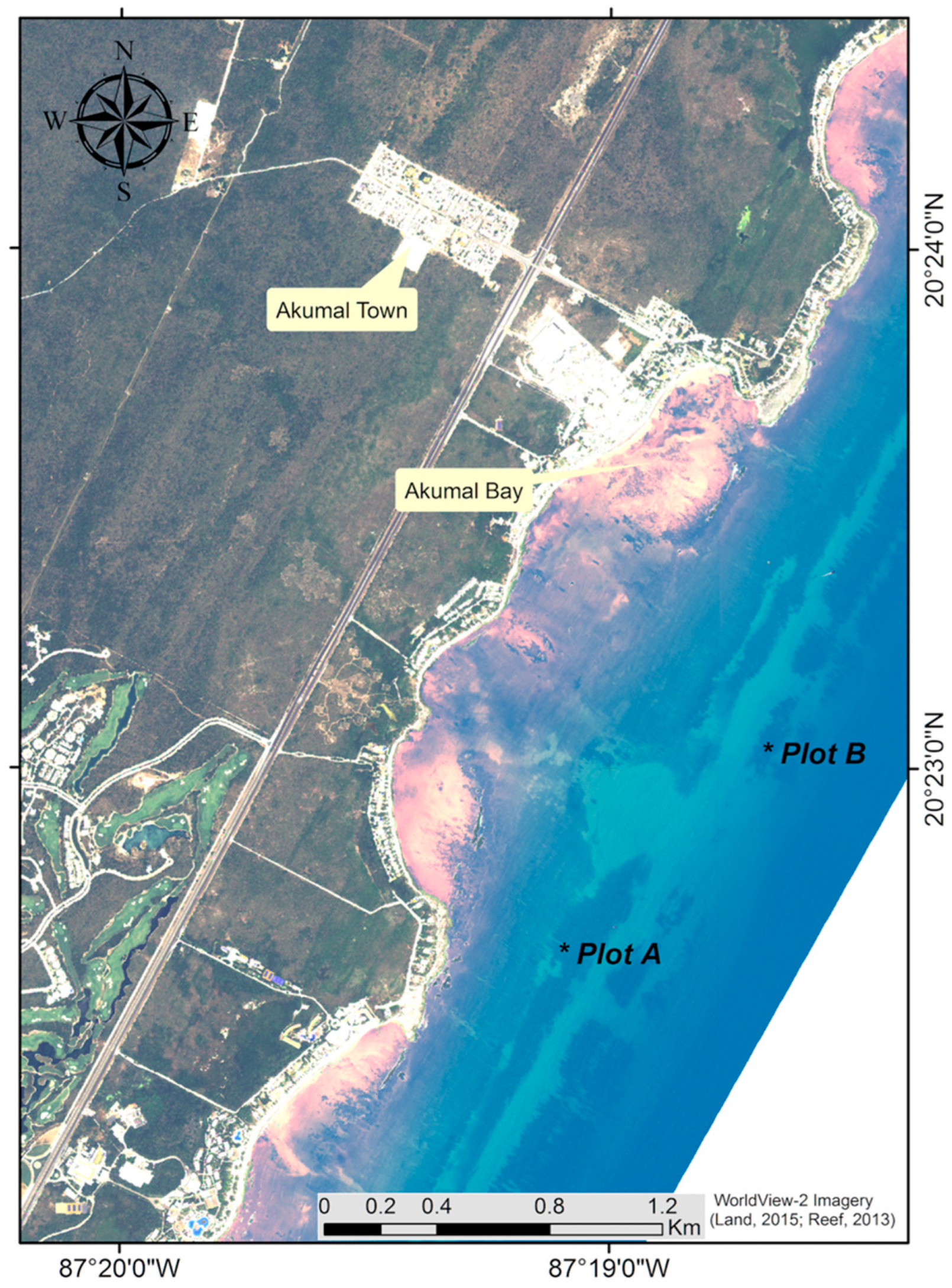
2.1. Study Area
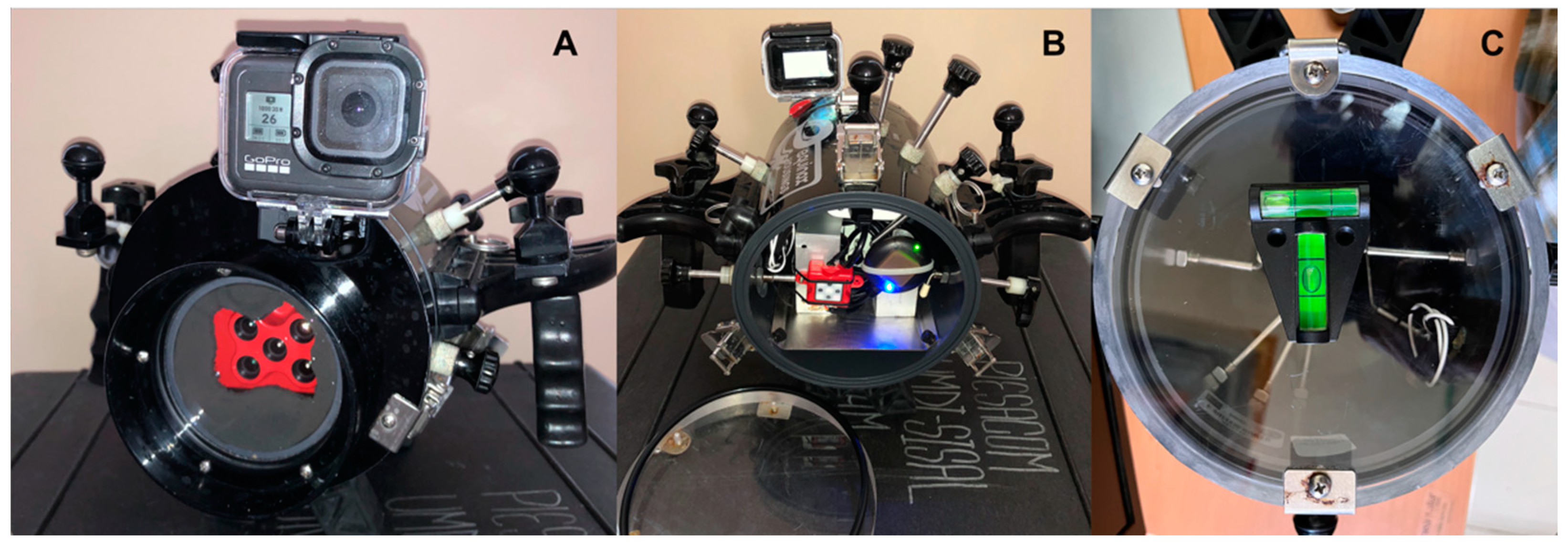
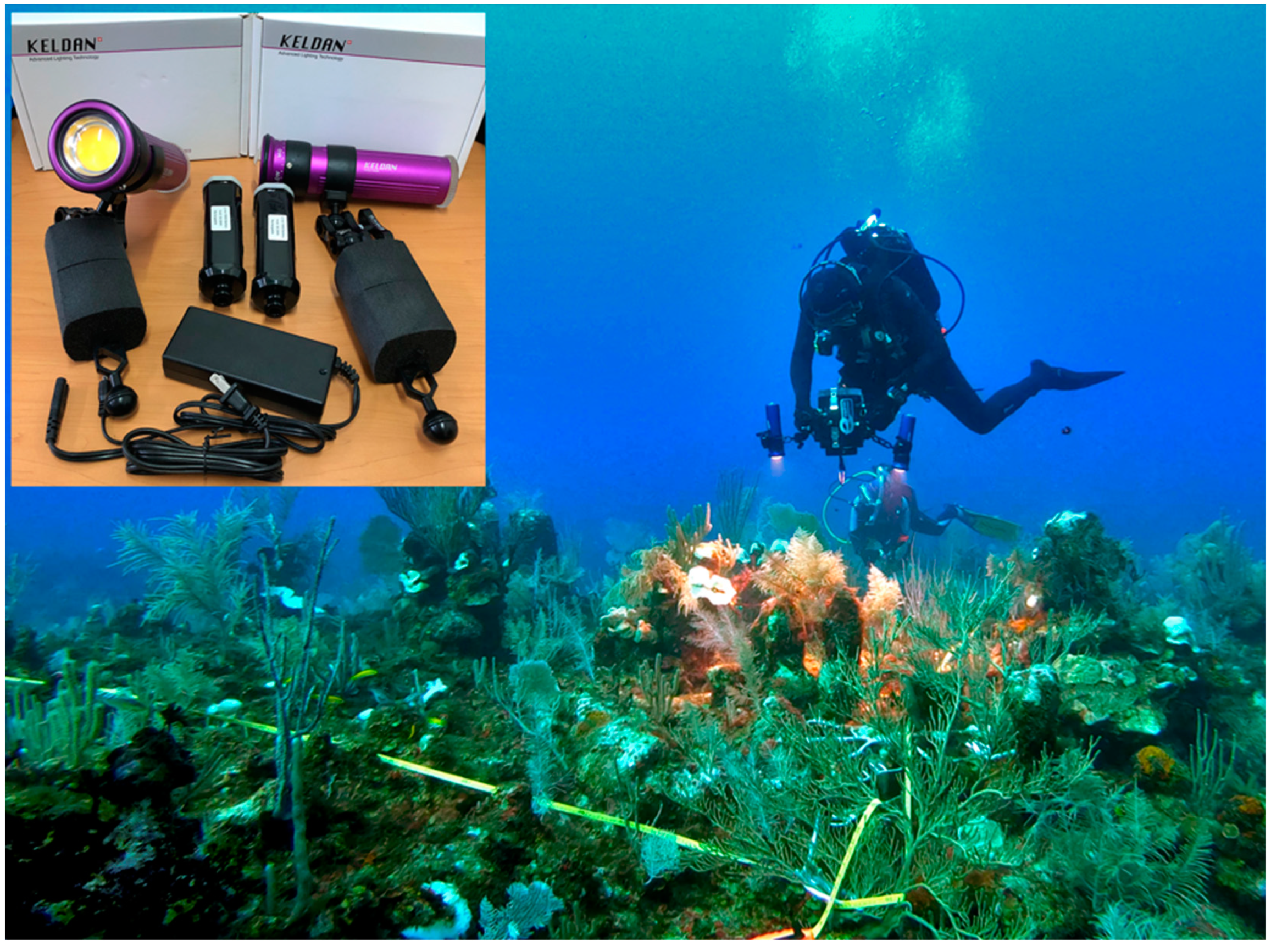
2.2. Field Equipment
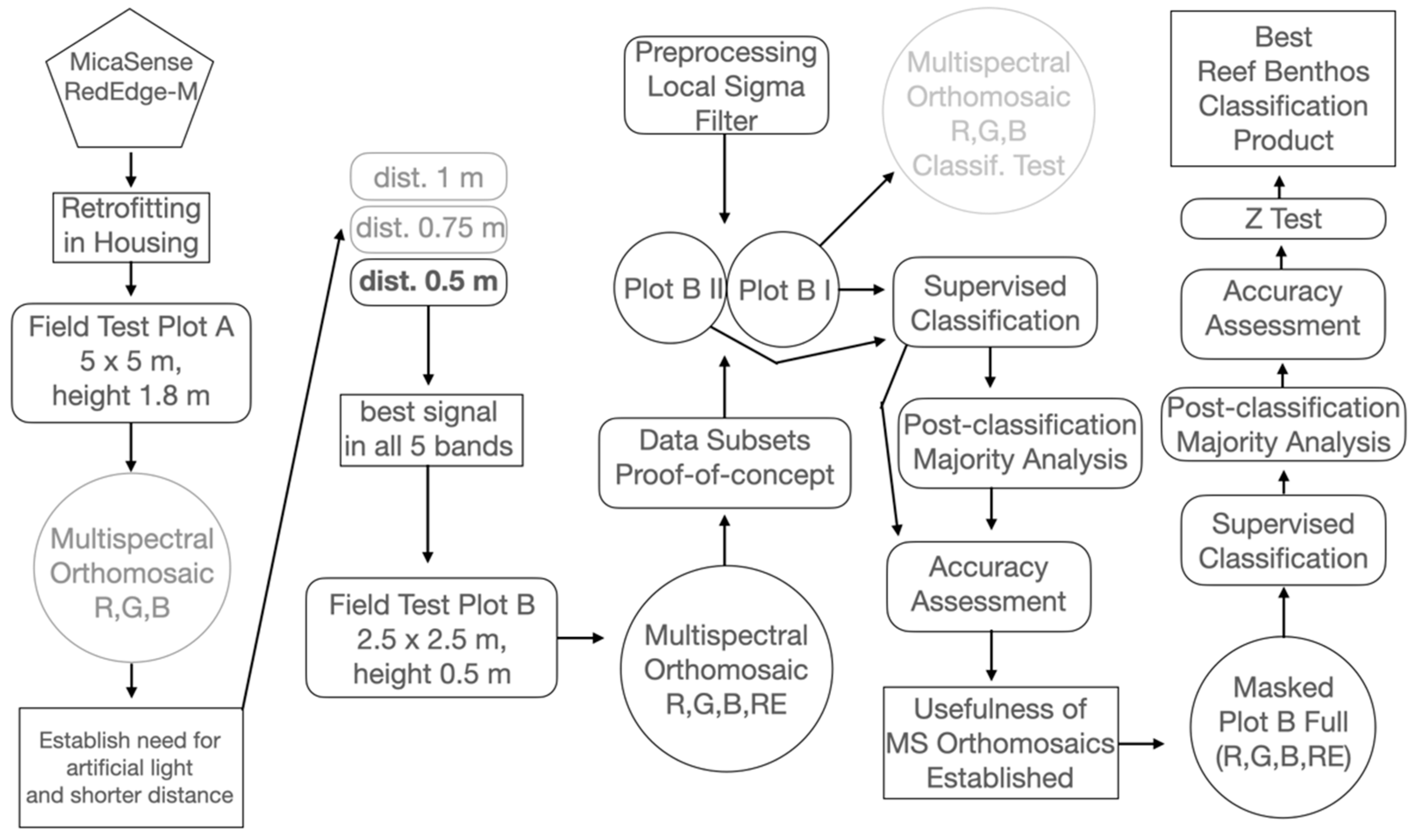
2.3. Field Tests
2.4. Orthomosaic Generation
- (1)
- A camera calibration file was created for each band of the sensor, following the MetaShape manual [45], and then the parameters in these files were applied to the imported multispectral imagery datasets.
- (2)
- The reflectance of these multispectral images was calibrated manually using the images of the CRP, and its reflectance values corresponding to each band (included in the CRP).
- (3)
- The primary channel was set to band 2 (green) since it provides the best visual contrast for these underwater images.
- (4)
- Metasahape workflow was followed using these settings: Image alignment (highest accuracy, generic preselection, excluding stationary tie points—useful for excluding suspended particles from the alignment process); build dense cloud (quality ultra-high, depth filtering moderate and calculating point confidence), dense cloud filter by confidence (range 0–2); build mesh (source data: dense cloud; surface type: height field; face count: high; interpolation enabled), and build orthomosaic using mesh as surface, and mosaic blending mode, also enabling hole filling.
- (5)
- The resulting orthomosaics (16-bit) were transformed to normalized reflectance (0–1 value range), creating new bands in the Raster Transform/Raster Calculator tool where bands are divided by the normalization factor of 32,768 [46], and exporting the resulting composite image as TIFF, selecting the index value in the raster transform field.
2.5. Artificial Ilumination Test
2.6. Orthomosaic Preprocessing
2.7. Supervised Classification
3. Results
3.1. Field Tests
3.1.1. Sensor Backfitting and Dry-Land Imagery Capture Test
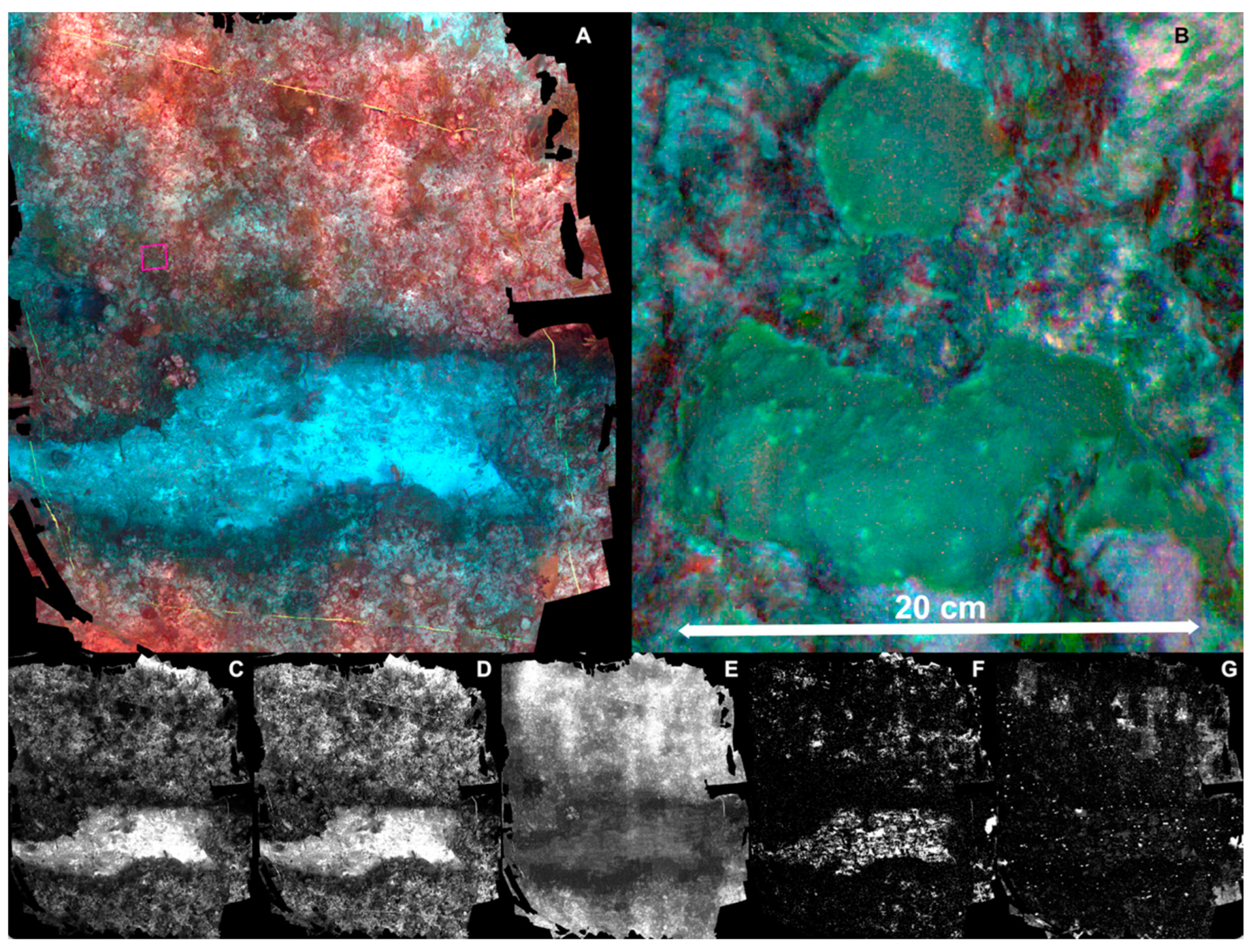
3.1.2. Underwater Orthomosaic Plot A
3.1.3. Artificial Lighting Test
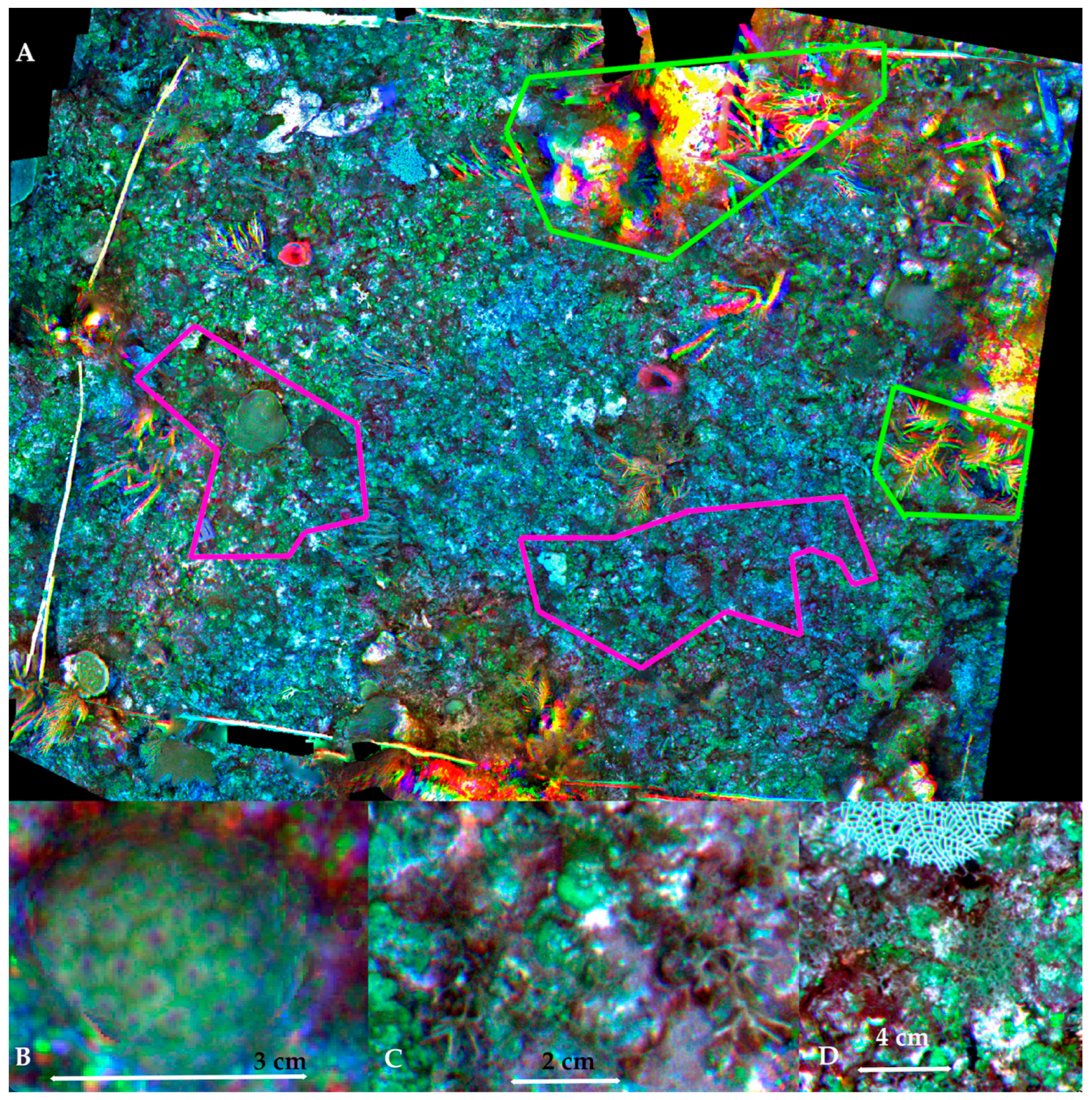
3.1.4. Underwater Orthomosaic Plot B
3.2. Supervised Classification
4. Discussion
4.1. RedEdge-M Underwater Operational Limitations
4.2. Artificial Illumination
4.3. Spatial Coherence of Multispectral Orthomosaics
4.4. Spectral Accuracy of Multispectral Orthomosaics
4.5. Additional Spectral and Spatial Caveats
4.6. Multispectral Orthomosaic Classification Accuracy and Implications
4.7. Comparison with Hyperspectral Approaches
4.8. What Can Be Learned from Other Digital Photogrammetry Approaches?
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hedley, J.D.; Roelfsema, C.M.; Chollett, I.; Harborne, A.R.; Heron, S.F.; Weeks, S.; Skirving, W.J.; Strong, A.E.; Eakin, C.M.; Christensen, T.R.L.; et al. Remote Sensing of Coral Reefs for Monitoring and Management: A Review. Remote Sens. 2016, 8, 118. [Google Scholar] [CrossRef]
- Lang, J.C. Status of Coral Reefs in the Western Atlantic: Results of Initial Surveys, Atlantic and Gulf Rapid Reef Assessment (Agrra) Program. Atoll Res. Bull. 2003, 496. [Google Scholar] [CrossRef]
- Gleason, A.C.R.; Reid, R.P.; Voss, K.J. Automated classification of underwater multispectral imagery for coral reef monitoring. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 Septerber–4 October 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Gleason, A.C.R.; Gracias, N.; Lirman, D.; Gintert, B.E.; Smith, T.B.; Dick, M.C.; Reid, R.P. Landscape video mosaic from a mesophotic coral reef. Coral Reefs 2009, 29, 253. [Google Scholar] [CrossRef]
- Lirman, D.; Gracias, N.; Gintert, B.E.; Gleason, A.C.R.; Reid, R.P.; Negahdaripour, S.; Kramer, P. Development and application of a video-mosaic survey technology to document the status of coral reef communities. Environ. Monit. Assess. 2006, 125, 59–73. [Google Scholar] [CrossRef]
- Gintert, B.; Gracias, N.; Gleason, A.; Lirman, D.; Dick, M.; Kramer, P.; Reid, P.R. Second-Generation Landscape Mosaics of Coral. In Proceedings of the 11th International Coral Reef Symposium, Fort Lauderdale, FL, USA, 7–11 July 2008; pp. 577–581. [Google Scholar]
- Gintert, B.; Gracias, N.; Gleason, A.; Lirman, D.; Dick, M.; Kramer, P.; Reid, P.R. Third-Generation Underwater Landscape Mosaics for Coral Reef Mapping and Monitoring. In Proceedings of the 12th International Coral Reef Symposium, Cairns, Australia, 9–13 July 2012. 5A Remote Sensing of Reef Environments. [Google Scholar]
- Lirman, D.; Gracias, N.; Gintert, B.; Gleason, A.; Deangelo, G.; Dick, M.; Martinez, E.; Reid, P.R. Damage and recovery assessment of vessel grounding injuries on coral reef habitats by use of georeferenced landscape video mosaics. Limn. Oceanogr. Methods 2010, 8, 88–97. [Google Scholar] [CrossRef]
- Gleason, A.; Lirman, D.; Gracias, N.; Moore TGriffin, S.; Gonzalez, M.; Gintert, B. Damage Assessment of Vessel Grounding Injuries on Coral Reef Habitats Using Underwater Landscape Mosaics. In Proceedings of the 63rd Gulf and Caribbean Fisheries Institute, San Juan, Puerto Rico, 1–5 November 2010; pp. 125–129. [Google Scholar]
- Shihavuddin, A.; Gracias, N.; Garcia, R.; Gleason, A.C.R.; Gintert, B. Image-Based Coral Reef Classification and Thematic Mapping. Remote Sens. 2013, 5, 1809–1841. [Google Scholar] [CrossRef]
- Figueira, W.; Ferrari, R.; Weatherby, E.; Porter, A.; Hawes, S.; Byrne, M. Accuracy and Precision of Habitat Structural Complexity Metrics Derived from Underwater Photogrammetry. Remote Sens. 2015, 7, 16883–16900. [Google Scholar] [CrossRef]
- Edwards, C.B.; Eynaud, Y.; Williams, G.J.; Pedersen, N.E.; Zgliczynski, B.J.; Gleason, A.C.R.; Smith, J.E.; Sandin, S.A. Large-area imaging reveals biologically driven non-random spatial patterns of corals at a remote reef. Coral Reefs 2017, 36, 1291–1305. [Google Scholar] [CrossRef]
- Ferrari, R.; Lachs, L.; Pygas, D.R.; Humanes, A.; Sommer, B.; Figueira, W.F.; Edwards, A.J.; Bythell, J.C.; Guest, J.R. Photogrammetry as a tool to improve ecosystem restoration. Trends Ecol. Evol. 2021, 36, 1093–1101. [Google Scholar] [CrossRef]
- Hernández-Landa, R.C.; Barrera-Falcon, E.; Rioja-Nieto, R. Size-frequency distribution of coral assemblages in insular shallow reefs of the Mexican Caribbean using underwater photogrammetry. PeerJ 2020, 8, e8957. [Google Scholar] [CrossRef]
- Barrera-Falcon, E.; Rioja-Nieto, R.; Hernández-Landa, R.C.; Torres-Irineo, E. Comparison of Standard Caribbean Coral Reef Monitoring Protocols and Underwater Digital Photogrammetry to Characterize Hard Coral Species Composition, Abundance and Cover. Front. Mar. Sci. 2021, 8, 722569. [Google Scholar] [CrossRef]
- Yuval, M.; Alonso, I.; Eyal, G.; Tchernov, D.; Loya, Y.; Murillo, A.C.; Treibitz, T. Repeatable Semantic Reef-Mapping through Photogrammetry and Label-Augmentation. Remote Sens. 2022, 13, 659. [Google Scholar] [CrossRef]
- Mumby, P.J.; Green, E.P.; Edwards, A.J.; Clark, C.D. Coral reef habitat-mapping: How much detail can remote sensing provide? Mar. Biol. 1997, 130, 193–202. [Google Scholar] [CrossRef]
- Andréfoüet, S.; Kramer, P.; Torres-Pulliza, D.; Joyce, K.E.; Hochberg, E.J.; Garza-Perez, R.; Mumby, P.J.; Riegl, B.; Yamano, H.; White, W.H.; et al. Multi-sites evaluation of IKONOS data for classification of tropical coral reef environments. Remote Sens. Environ. 2003, 88, 128–143. [Google Scholar] [CrossRef]
- Stumpf, R.; Holderied, K.; Sinclair, M. Determination of water depth with high resolution satellite image over variable bottom types. Limnol Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Mellin, C.; Andréfouët, S.; Ponton, D. Spatial predictability of juvenile fish species richness and abundance in a coral reef environment. Coral Reefs 2007, 26, 895–907. [Google Scholar] [CrossRef]
- Pittman, S.J.; Christensen, J.D.; Caldow, C.; Menza, C.; Monaco, M.E. Predictive mapping of fish species richness across shallow-water seascapes in the Caribbean. Ecol. Model. 2007, 204, 9–21. [Google Scholar] [CrossRef]
- Hogrefe, K.R.; Wright, D.J.; Hochberg, E. Derivation and Integration of Shallow-Water Bathymetry: Implications for Coastal Terrain Modeling and Subsequent Analyses. Mar. Geodesy 2008, 31, 299–317. [Google Scholar] [CrossRef]
- Knudby, A.; LeDrew, E.; Brenning, A. Predictive mapping of reef fish species richness, diversity and biomass in Zanzibar using IKONOS imagery and machine-learning techniques. Remote Sens. Environ. 2010, 114, 1230–1241. [Google Scholar] [CrossRef]
- Knudby, A.; Roelfsema, C.; Lyons, M.; Phinn, S.; Jupiter, S. Mapping fish community variables by integrating field and satellite data, object-based image analysis and modeling in a traditional Fijian fisheries management area. Remote Sens. 2011, 3, 460–483. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for map- ping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Maritorena, S. Remote sensing of the water attenuation in coral reefs: A case study in French Polynesia. Int. J. Remote Sens. 1996, 17, 155–166. [Google Scholar] [CrossRef]
- Mumby, P.; Clark, C.; Green, E.P.; Edwards, A.J. Benefits of water column correction and contextual editing for mapping coral reefs. Int. J. Remote Sens. 1998, 19, 203–210. [Google Scholar] [CrossRef]
- Goodman, J.A.; Purkis, S.J.; Phinn, S.R. Coral Reef Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Holden, H.; LeDrew, E. Hyperspectral identification of coral reef features. Int. J. Remote Sens. 1999, 20, 2545–2563. [Google Scholar] [CrossRef]
- Chennu, A.; Färber, P.; De’Ath, G.; De Beer, D.; Fabricius, K.E. A diver-operated hyperspectral imaging and topographic surveying system for automated mapping of benthic habitats. Sci. Rep. 2017, 7, 7122. [Google Scholar] [CrossRef]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters—A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Summers, N.; Johnsen, G.; Mogstad, A.; Løvås, H.; Fragoso, G.; Berge, J. Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System. Remote Sens. 2022, 14, 1325. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Atkinson, M.J.; Apprill, A. Spectral reflectance of coral. Coral Reefs 2003, 23, 84–95. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, H.; Chen, Y.; Riaz, W.; Yang, P.; Song, H.; Shen, Y.; Zhan, S.; Huang, H.; Wang, H.; et al. Color restoration method for underwater objects based on multispectral images. In OCEANS 2016—Shanghai; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Guo, Y.; Song, H.; Liu, H.; Wei, H.; Yang, P.; Zhan, S.; Wang, H.; Huang, H.; Liao, N.; Mu, Q.; et al. Model-based restoration of underwater spectral images captured with narrowband filters. Opt. Express 2016, 24, 13101–13120. [Google Scholar] [CrossRef]
- Yang, P.; Guo, Y.; Wei, H.; Dan, S.; Song, H.; Zhang, Y.; Wu, C.; Shentu, Y.; Liu, H.; Huang, H.; et al. Method for spectral restoration of underwater images: Theory and application. Infrared Laser Eng. 2017, 45, 323001. [Google Scholar] [CrossRef]
- Wei, H.; Guo, Y.; Yang, P.; Song, H.; Liu, H.; Zhang, Y. Underwater multispectral imaging: The influences of color filters on the estimation of underwater light attenuation. In OCEANS 2017—Aberdeen; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Wu, C.; Shentu, Y.C.; Wu, C.; Guo, Y.; Zhang, Y.; Wei, H.; Yang, P.; Huang, H.; Song, H. Development of an underwater multispectral imaging system based on narrowband color filters. In OCEANS 2018 MTS/IEEE Charleston; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- MicaSense. MicaSense RedEdge-M Multispectral Camera, User Manual Rev 0.1, 47 pag. 2017. Available online: https://support.micasense.com/hc/en-us/articles/215261448-RedEdge-User-Manual-PDF-Legacy (accessed on 30 October 2022).
- Pedersen, N.E.; Edwards, C.B.; Eynaud, Y.; Gleason, A.C.R.; Smith, J.E.; Sandin, S.A. The influence of habitat and adults on the spatial distribution of juvenile corals. Ecography 2019, 42, 1703–1713. [Google Scholar] [CrossRef]
- Agisoft. Agisoft Metashape User Manual Professional Edition, Version 1.7, 179 pag. 2022. Available online: https://www.agisoft.com/pdf/metashape_1_7_en.pdf (accessed on 30 October 2022).
- Agisoft. MicaSense RedEdge MX Processing Workflow (Including Reflectance Calibration) in Agisoft Metashape Professional. 2022. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000148780-micasense-rededge-mx-processing-workflow-including-reflectance-calibration-in-agisoft-metashape-pro (accessed on 30 October 2022).
- Eliason, E.M.; McEwen, A.S. Adaptive Box Filters for Removal of Random Noise from Digital Images. Photogramm. Eng. Remote Sens. 1990, 56, 453. [Google Scholar]
- Exelis. ENVI-Help, ROI Separability, Exelis Visual Information Solutions. 2015. Available online: https://www.l3harrisgeospatial.com/docs/regionofinteresttool.html#ROISeparability (accessed on 30 October 2022).
- Congalton, R.S. A Review of Assessing the Accuracy of Classifications of Remotely Sensed Data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Ma, Z.K.; Redmond, R.L. Tau-coefficients for accuracy assessment of classification of remote-sensing data. Photogramm. Eng. Remote Sens. 1995, 61, 435–439. [Google Scholar]
- Keldan. Underwater Video Light VIDEO 8X 13000lm CRI92 Operating Instructions. Keldan Gmbh Switzerland. 2017. Available online: https://keldanlights.com/cms/upload/_products/Compact_Lights/Video_8X_13000lm_CRI92/pdf/Video8X_13000lm_CRI92_Operating_Instructions_english.pdf (accessed on 30 October 2022).
- Steiner, A. Understanding the Basics of Underwater Lighting, Ocean News. 2013. Available online: https://www.deepsea.com/understanding-the-basics-of-underwater-lighting/ (accessed on 1 October 2022).
- Jaffe, J.S. Computer modeling and the design of optimal underwater Imaging Systems. IEEE J. Ocean. Eng. 1990, 15, 2. [Google Scholar] [CrossRef]
- Jaffe, J.S.; Moore, K.D.; McLean, J.; Strand, M.P. Underwater optical imaging: Status and prospects. Oceanography 2001, 3, 64–75. [Google Scholar] [CrossRef]
- Frontera, F.; Smith, M.J.; Marsh, S. Preliminary investigation into the geometric calibration of the micasense rededge-m multispectral camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 17–22. [Google Scholar] [CrossRef]
- Lucas, M.Q.; Goodman, J. Linking Coral Reef Remote Sensing and Field Ecology: It’s a Matter of Scale. J. Mar. Sci. Eng. 2014, 3, 1–20. [Google Scholar] [CrossRef]
- Duntley, S.Q. Light in the Sea. J. Opt. Soc. Am. 1963, 53, 214–233. [Google Scholar] [CrossRef]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. Remote Sensing Handbook for Tropical Coastal Management. In Coastal Management Sourcebooks 3; Edwards, A.J., Ed.; UNESCO: Paris, France, 2000; 316p. [Google Scholar]
- MicaSense. Knowledge Base “What does RedEdge’s Downwelling Light Sensor (DLS) Do for My Data?”. 2022. Available online: https://support.micasense.com/hc/en-us/articles/219901327-What-does-RedEdge-s-Downwelling-Light-Sensor-DLS-do-for-my-data- (accessed on 23 September 2022).
- MicaSense. Knowledge Base “Downwelling Light Sensor (DLS) Basics”. 2022. Available online: https://support.micasense.com/hc/en-us/articles/115002782008-Downwelling-Light-Sensor-DLS-Basics (accessed on 23 September 2022).
- MicaSense. Knowledge Base “Using Panels and/or DLS in Post-Processing”. 2022. Available online: https://support.micasense.com/hc/en-us/articles/360025336894-Using-Panels-and-or-DLS-in-Post-Processing (accessed on 23 September 2022).
- Gracias, N.; Negahdaripour, S.; Neumann, L.; Prados, R.; Garcia, R. A motion compensated filtering approach to remove sunlight flicker in shallow water images. In OCEANS 2008; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Healthy Reefs Initiative. 2022. Available online: https://www.healthyreefs.org/cms/healthy-reef-indicators/ (accessed on 30 October 2022).
- Rashid, A.R.; Chennu, A. A Trillion Coral Reef Colors: Deeply Annotated Underwater Hyperspectral Images for Automated Classification and Habitat Mapping. Data 2020, 5, 19. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Atkinson, M.J. Spectral discrimination of coral reef benthic communities. Coral Reefs 2000, 19, 164–171. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Atkinson, M.J. Capabilities of remote sensors to classify coral, algae, and sand as pure and mixed spectra. Remote Sens. Environ. 2003, 85, 174–189. [Google Scholar] [CrossRef]
- Runyan, H.; Petrovic, V.; Edwards, C.B.; Pedersen, N.; Alcantar, E.; Kuester, F.; Sandin, S.A. Automated 2D, 2.5D, and 3D Segmentation of Coral Reef Pointclouds and Orthoprojections. Front. Robot. AI 2022, 9, 884317. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number | Band Name | Center Wavelength (nm) | Bandwidth FWHM (nm) |
|---|---|---|---|
| 1 | Blue | 475 | 20 |
| 2 | Green | 560 | 20 |
| 3 | Red | 668 | 10 |
| 4 | Near IR | 840 | 40 |
| 5 | Red edge | 717 | 10 |
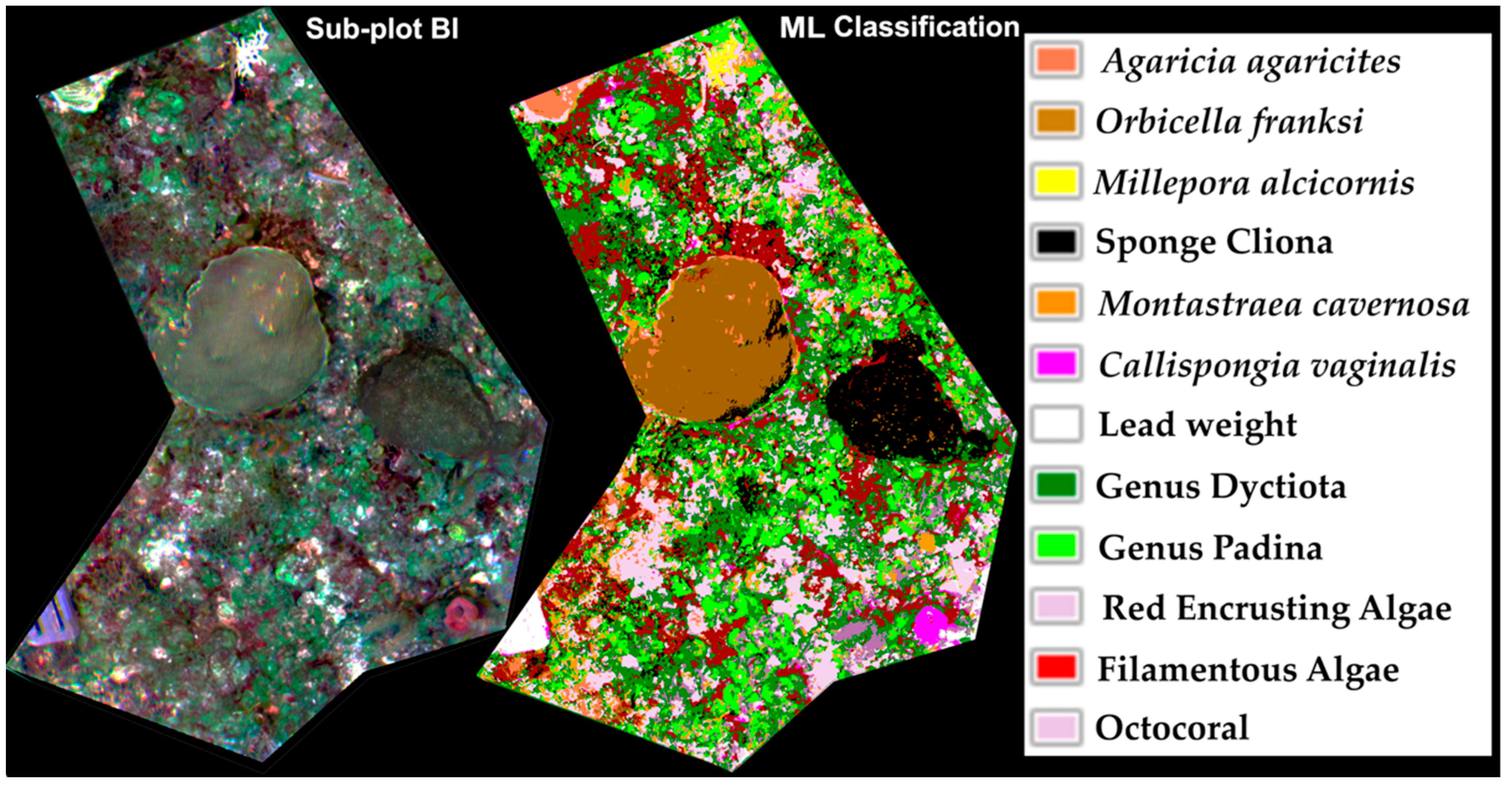
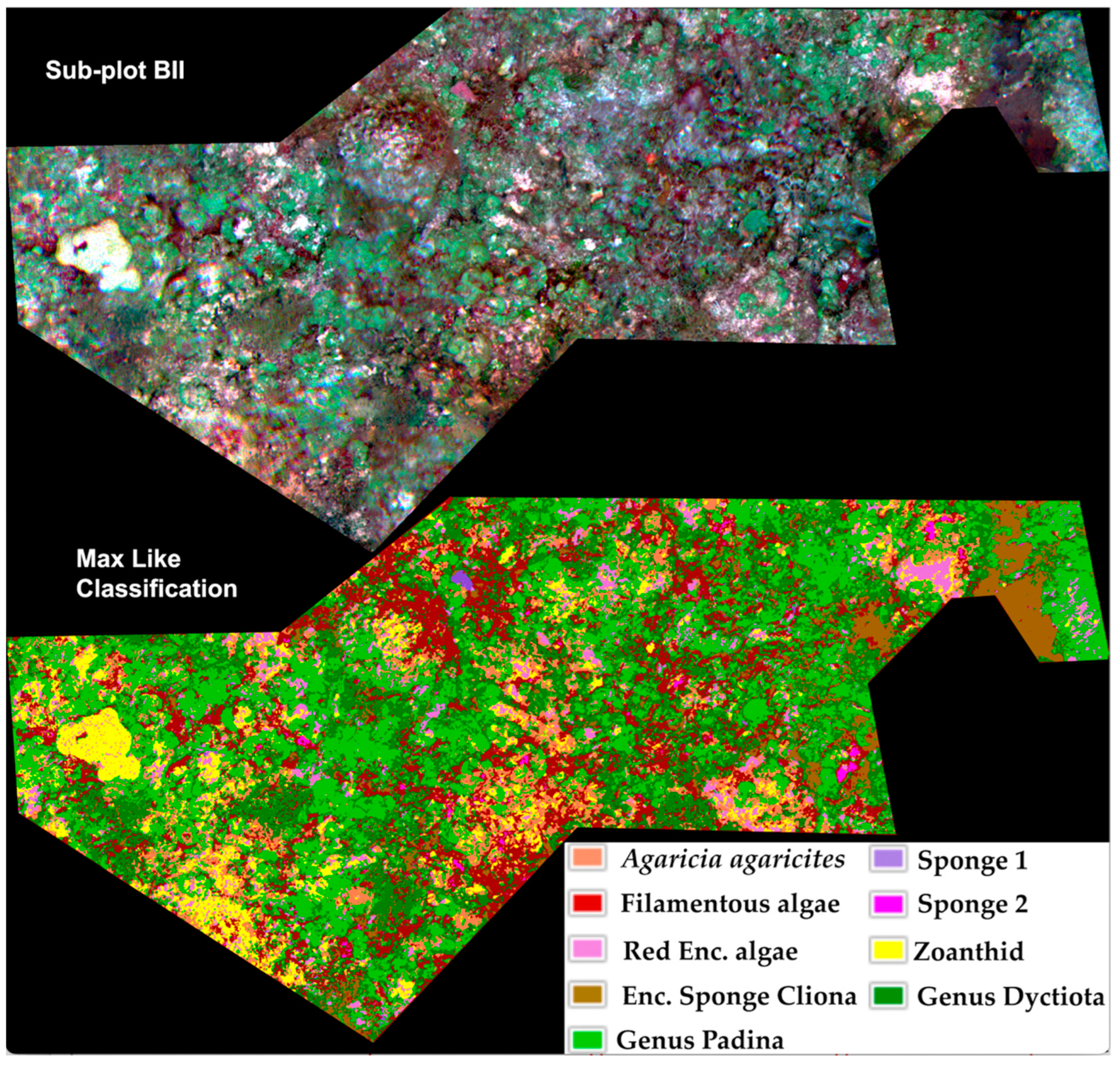
| Class | Classes Plot B I | Classes Plot BII |
|---|---|---|
| 1 | Coral Agaricia agaricites | Coral Agaricia agaricites |
| 2 | Coral Orbicella franksi | NP |
| 3 | Encrusting Sponge Cliona Tenius | Encrusting Sponge Cliona Tenius |
| 4 | Fire Coral Millepora alcicornis | NP |
| 5 | Coral Montastraea cavernosa | NP |
| 6 | Sponge Callispongia vaginalis | NP |
| 7 | Lead weight | NP |
| 8 | Algae Genus Dyctiota | Algae Genus Dyctiota |
| 9 | Algae Genus Padina | Algae Genus Padina |
| 10 | Red Encrusting Algae | Red Encrusting Algae |
| 11 | Filamentous Algae | Filamentous Algae |
| 12 | Octocoral | NP |
| 13 | NP | Encrusting Sponge 1 |
| 14 | NP | Encrusting Sponge 2 |
| 15 | NP | Zoanthid Palythoa caribeorum |
| Original | LSF 9-Pixels | ||||||
|---|---|---|---|---|---|---|---|
| Subplot | SCA | OA | Kappa | Tau | OA | Kappa | Tau |
| B I RGBRE 12 classes | SVM | 79.00% | 0.77 | 0.77 | 81.64% | 0.79 | 0.80 |
| ML | 79.86% | 0.78 | 0.78 | 79.86% | 0.78 | 0.78 | |
| Mh | 64.97% | 0.61 | 0.62 | 67.26% | 0.64 | 0.64 | |
| BI RGB | SVM | - | - | - | 67.18% | 0.63 | 0.64 |
| 12 classes | ML | - | - | - | 64.12% | 0.60 | 0.61 |
| B I RGBRE 12 cl/Postcl | SVM | - | - | - | 82.97% | 0.81 | 0.81 |
| ML | - | - | - | 84.37% | 0.83 | 0.83 | |
| Mh | - | - | - | 69.30% | 0.66 | 0.67 | |
| B II RGBRE | ML | 70.15% | 0.65 | 0.66 | 72.29% | 0.68 | 0.68 |
| 9 classes | SVM | 68.80% | 0.64 | 0.64 | 70.17% | 0.65 | 0.66 |
| B II RGBRE | ML | - | - | - | 78.86% | 0.74 | 0.76 |
| 9 c/Postcl | SVM | - | - | - | 73.84% | 0.69 | 0.70 |
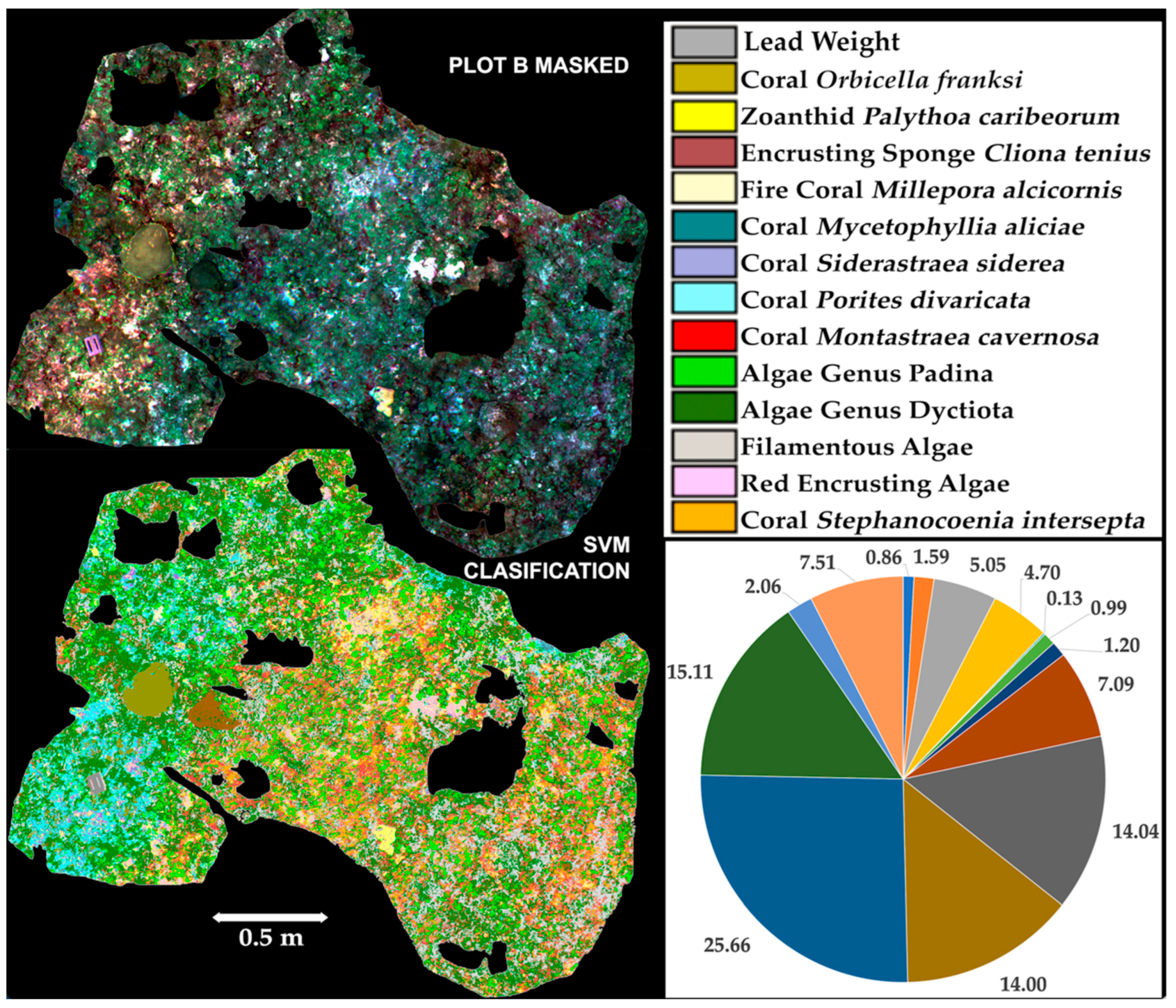
| Class | Name | Cover Percentage (%) |
|---|---|---|
| 1 | Lead weight | 0.86 |
| 2 | Coral Orbicella franksi | 1.59 |
| 3 | Zoanthid Palythoa caribeorum | 5.05 |
| 4 | Encrusting Sponge Cliona tenius | 4.70 |
| 5 | Fire Coral Millepora alcicornis | 0.13 |
| 6 | Coral Mycetophyllia aliciae | 0.99 |
| 7 | Coral Siderastraea siderea | 1.20 |
| 8 | Coral Porites divaricata | 7.09 |
| 9 | Coral Montastraea cavernosa | 14.04 |
| 10 | Algae Genus Padina | 14.00 |
| 11 | Algae Genus Dyctiota | 25.66 |
| 12 | Filamentous Algae | 15.11 |
| 13 | Red Encrusting Algae | 2.06 |
| 14 | Coral Stephanocoenia intersepta | 7.51 |
| Algorithms | Overall Accuracy | Kappa Coefficient | Tau Coefficient |
|---|---|---|---|
| Maximum likelihood | 82.46% | 0.81 | 0.81 |
| Neural net | 70.40% | 0.67 | 0.68 |
| SVM | 82.77% | 0.81 | 0.81 |
| Classification Comparison | Z |
|---|---|
| Maximum likelihood vs. neural net | 0.79 |
| Maximum likelihood vs. SVM | 0.022 |
| Neural net vs. SVM | 0.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garza-Pérez, J.R.; Barrón-Coronel, F. Coral Reef Benthos Classification Using Data from a Short-Range Multispectral Sensor. Remote Sens. 2022, 14, 5782. https://doi.org/10.3390/rs14225782
Garza-Pérez JR, Barrón-Coronel F. Coral Reef Benthos Classification Using Data from a Short-Range Multispectral Sensor. Remote Sensing. 2022; 14(22):5782. https://doi.org/10.3390/rs14225782
Chicago/Turabian StyleGarza-Pérez, Joaquín Rodrigo, and Frida Barrón-Coronel. 2022. "Coral Reef Benthos Classification Using Data from a Short-Range Multispectral Sensor" Remote Sensing 14, no. 22: 5782. https://doi.org/10.3390/rs14225782
APA StyleGarza-Pérez, J. R., & Barrón-Coronel, F. (2022). Coral Reef Benthos Classification Using Data from a Short-Range Multispectral Sensor. Remote Sensing, 14(22), 5782. https://doi.org/10.3390/rs14225782