

ExtractEO, a Pipeline for Disaster Extent Mapping in the Context of Emergency Management


Abstract

1. Introduction
2. Materials and Methods
2.1. Data
- the availability of the satellites (they can be used for other purposes, such as military),
- the overflight feasibility analysis (which depends on satellite orbit and agility),
- the cloud cover over the scene at the acquisition time for optical data.
2.2. Objectives
2.3. ExtractEO Architecture
2.3.1. EOReader
- the algorithm (and its developer) can focus on its core tasks (such as extraction), without needing to account for the sensor characteristics (how to load a band, which band corresponds to which band number, etc.),
- the addition of a new sensor is effortless and requires no algorithm modification,
- maintenance is simplified and the code quality is significantly improved,
- testing is simplified, as the sensor-related parts are tested in the EOReader library.

2.3.2. ExtractEO Generic Workflow
2.3.3. ExtractEO SaaS
- Area of Interest
- Start date
- End data
- Extraction resolution
- Minimum mapping unit
- Visualization stack (true color, false color, SWIR)
- Visualization resolution
2.4. Fully Automated End-to-End Chains
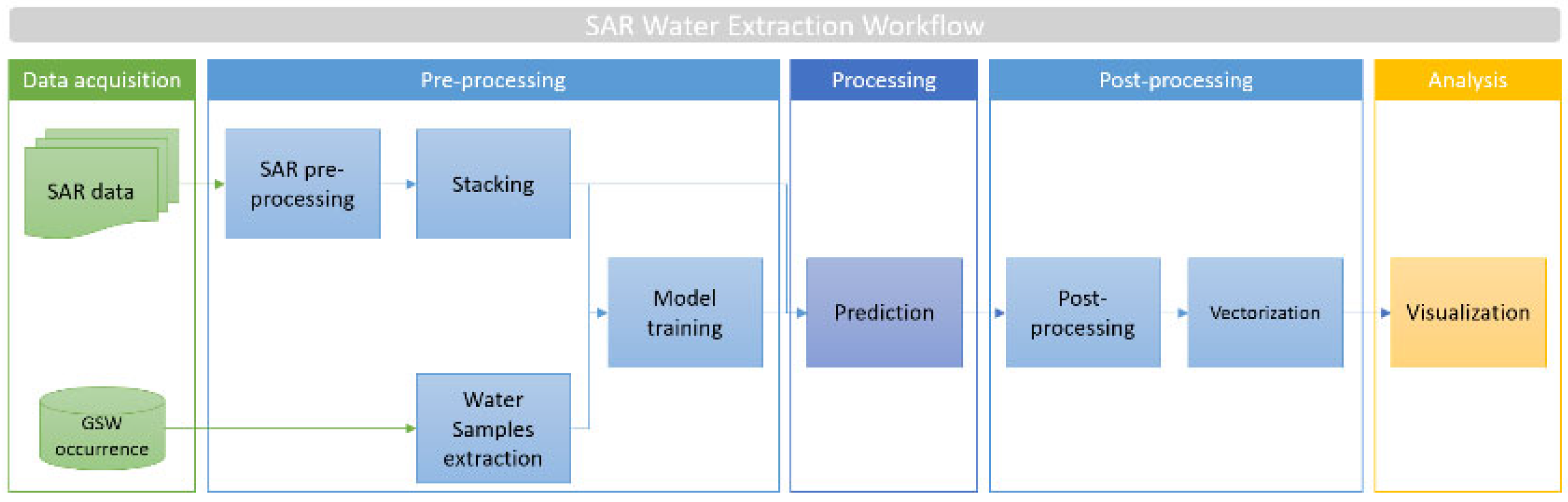
2.4.1. Flood and Water Body Mapping Pipeline
- Data Acquisition
- Optical data download through EEO (Sentinel-2/3, Landsat-5/7/8/9) or other sources;
- GSW occurrence product download over the area covered by the optical data;
- Pre-processing
- Spectral index computation derived from the optical data: MNDWI, AWEInsh, AWEIsh, WI [18];
- Stack relevant spectral indices and bands for training;
- Cloud extraction from the optical data;
- Water sample generation from the GSW, using an occurrence value (which is relatively low for flood mapping and high for water body mapping);Water samples are filtered using the cloud mask generated by EEO, and the indices are computed to remove outliers and filter the training samples to the hydrological reality of the image (water extent, resolution);
- Training, using the Multi-Layer Perceptron classifier by default. After internal trials, this algorithm appears to be the most reliable classifier for water detection on big stacks. However, the training method can be chosen among other classifiers that are implemented, such as Random Forest or Support Vector Machine, for project needs;
- Processing
- Prediction of a trained model over a stacked image;
- Post-processing
- Slope and hillshade thresholds derived from HR DEMs are applied to refine the water extraction (post-processing);
- Mosaicking of the results coming from several tiles with the same date and projection;
- Minimum mapping unit (MMU) sieving to remove small features and fill holes;
- Vectorization step in all classic formats, including GeoJSON, ESRI Shapefile, or Keyhole Markup Language (KML);
- Visualization
- A second stack may be included in the output folder with a separate stack of bands/indices, with a different resolution than the training/predicted stack, and used only for visualization purposes. This step is relevant when large areas are covered with the need to decrease the resolution in order to display and navigate quickly with the optical data as a background.
2.4.2. Burnt Area Mapping Pipeline
- Data Acquisition—the burnt areas are derived from a change detection method by processing both post- and pre-event images;
- Processing:
- Two models based on the pre- and post-NBR (Normalized Burn Ratio) and BAI (Burned Area Index) indices are computed to derive a potentially burnt area mask.
- Then, zonal statistic operations are applied and features are filtered to reduce false positives using NIR and SWIR post-event bands, and the NBR and BAI for Sentinel-2 [21] indices;
- Post-processing
- Mosaicking of the results coming from tiles with the same date and projection;
- Minimum mapping unit (MMU) sieving to remove small features and fill holes;
- Vectorization step in all classic formats, including GeoJSON, ESRI Shapefile, or Keyhole Markup Language (KML).
3. Results
3.1. Event Delineation Masks
3.2. Megadisaster Mapping
- Download of the 51 × 2 S2 tiles (pre and post-event);
- Burnt area detection at 20 m resolution;
- Cloud detection at 20 m resolution;
- Minimum Mapping Unit application (1 ha);
- Image stack and mosaicking for visualization and validation;
- Vectorization of the burnt areas and clouds.
3.3. Water Surface Time-Series
4. Discussion and Research for the Future
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Allenbach, B.; Andreoli, R.; Battiston, S.; Bestault, C.; Clandillon, S.; Fellah, K.; Henry, J.-B.; Meyer, C.; Scius, H.; Tholey, N.; et al. Rapid EO disaster mapping service: Added value, feedback and perspectives after 4 years of charter actions. In Proceedings of the IGARSS ’05, 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; pp. 4373–4378. [Google Scholar] [CrossRef]
- Maxant, J.; Proy, C.; Fontannaz, D.; Clandillon, S.; Allenbach, B.; Yésou, H.; Battiston, S.; Uribe, C.; De Fraipont, P. Contribution of Pleiades-HR imagery for disaster damage mapping: Initial feedback over Asia, Africa, Europe or the Caribbean. In Proceedings of the 33th EARSeL Symposium, Matera, Italy, 3–6 June 2013. [Google Scholar]
- Huber, C.; Battiston, S.; Yésou, H.; Tinel, C.; Laurens, A.; Studer, M. Synergy of VHR pleiades data and SWIR spectral bands for flood detection and impact assessment in urban areas: Case of Krymsk, Russian Federation, in July 2012. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4538–4541. [Google Scholar] [CrossRef]
- Herve, Y.; Francesco, S.; Nadine, T.; Antonios, M.; Stephen, C.; Claire, H.; Mathias, S.; de Paul, F. Adressing emergency flood mapping and monitoring of inland water bodies with Sentinel 1-2. Expectative and perspectives. Paper conference. In Proceedings of the Living Planet Symposium 2013, Edinburgh, UK, 9–13 September 2013; Volume ESA SP-722. [Google Scholar]
- Giraud, H.; Allenbach, B.; Tholey, N.; Battiston, S.; Đệ, P.; Proy, C.; Fontannaz, D. More than fifteen years of experience in natural disaster mapping in the context of emergency management support. In Proceedings of the IGARSS 2014-2014 IEEE International Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2709–2711. [Google Scholar] [CrossRef]
- Nadine, T.; Stephen, C.; Lucia, L.; Jérôme, M.; Stéphanie, B.; Hervé, Y. Exploitation of Sentinel-1 Data for Flood Mapping and Monitoring within the Framework of the Copernicus Emergency Core and Downstream Services. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5393–5396. [Google Scholar] [CrossRef]
- De Groeve, T. Chapter 16—Knowledge-Based Crisis and Emergency Management. In Science for Policy Handbook; Elsevier: Amsterdam, The Netherlands, 2020; pp. 182–194. [Google Scholar]
- About the ESA Charter Mapper. 2020. Available online: https://docs.charter.uat.esaportal.eu/about/ (accessed on 16 September 2022).
- Generation of the Global Flood Monitoring Product Output Layers. Available online: https://extwiki.eodc.eu/GFM/PDD/GFMoutputLayers (accessed on 16 September 2022).
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Cao, S.; Tupas, M.; Roth, F.; Navacchi, C.; Melzer, T.; Freeman, V.; Wagner, W. Satellite-Based Flood Mapping through Bayesian Inference from a Sentinel-1 SAR Datacube. Remote Sens. 2022, 14, 3673. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Squicciarino, G.; Fiori, E.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M.; Puca, S. An Automatic Processing Chain for Near Real-Time Mapping of Burned Forest Areas Using Sentinel-2 Data. Remote Sens. 2020, 12, 674. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- ESA Data Access Portfolio. Available online: https://spacedata.copernicus.eu/documents/20126/0/DAP+Release+phase2+V2_8.pdf/82297817-2b96-d3de-c397-776292336434 (accessed on 19 May 2022).
- EOReader. Available online: https://github.com/sertit/eoreader (accessed on 19 May 2022).
- EOReader Spectral Band Mapping. Available online: https://eoreader.readthedocs.io/en/latest/optical.html (accessed on 14 June 2022).
- ExtractEO SaaS. Available online: https://extracteo.sertit.unistra.fr/ (accessed on 19 May 2022).
- EOReader Indices. Available online: https://eoreader.readthedocs.io/en/latest/api/eoreader.bands.indices.html (accessed on 14 June 2022).
- Martinis, S.; Clandillon, S.; Plank, S.; Twele, A.; Huber, C.; Caspard, M.; Maxant, J.; Cao, W.; Haouet, S.; Fuchs, E.M. ASAPTERRA—Advancing SAR and Optical Methods for Rapid Mapping. Project Report. 2017. Available online: https://elib.dlr.de/110776/1/ASAPTERRA_FinalReport_2017.pdf (accessed on 8 June 2022).
- IWG-SEM Fire Mapping Guidelines. Available online: https://wiki.iwg-sem.org/index.php/Fire_mapping_guidelines (accessed on 18 May 2022).
- Huang, H.; Roy, D.P.; Boschetti, L.; Zhang, H.K.; Yan, L.; Kumar, S.S.; Gomez-Dans, J.; Li, J. Separability analysis of Sentinel-2A multi-spectral instrument (MSI) data for burned area discrimination. Remote Sens. 2016, 8, 873. [Google Scholar] [CrossRef]
- Target Threshold Critical Success Index of 70–80% for Copernicus Global Flood Monitoring Product. Available online: https://extwiki.eodc.eu/GFM/PUM/UserRequirements. (accessed on 14 June 2022).
- CEMS-RM Product Specifications. Available online: https://emergency.copernicus.eu/mapping/ems/rapid-mapping-portfolio (accessed on 5 September 2022).
- Crétaux, J.-F.; Merchant, C.J.; Duguay, C.; Simis, S.; Calmettes, B.; Bergé-Nguyen, M.; Wu, Y.; Zhang, D.; Carrea, L.; Liu, X.; et al. ESA Lakes Climate Change Initiative (Lakes_Cci): Lake Products; Version 1.0; Centre for Environmental Data Analysis: Oxford, UK, 2020. [Google Scholar] [CrossRef]
- Adrian, R.; O’Reilly, C.M.; Zagarese, H.; Baines, S.B.; Hessen, D.O.; Keller, W.; Livingstone, D.M.; Sommaruga, R.; Straile, D.; Van Donk, E.; et al. Lakes as sentinels of climate change. Limnol. Oceanogr. 2009, 54, 2283–2297. [Google Scholar] [CrossRef] [PubMed]
- Yalikun, T.; Raimond, C.; Nagorngar, A.K.; Zakinet, D.; Schuster, M.; Sylvestre, F. Chapitre 5. Variabilité des crues et des paysages du lac Fitri depuis les grandes sécheresses des années 1970–1980. In Le Tchad des Lacs; IRD Editions: Marseille, France, 2019. [Google Scholar]
- Raimond, C.; Yalikun, T.; Cretaux, J.F.; Bergé-Nguyen, M.; Schuster, M.; Sylvestre, F. Anticipating the Evolution of the Fitri Lake System: Temporalities of an Overflowing Flood and Its Socio-Ecological Consequences. In Proceedings of the EGU General Assembly 2021, Online, 19–30 April 2021. EGU21-14459. [Google Scholar] [CrossRef]
- ArcGIS Story Map on the Fitri Lake Water Extent. Available online: https://storymaps.arcgis.com/stories/4cb5291dbc8f4a75b7254546b11058ee (accessed on 18 May 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constellation | Instrument | Product Type/Processing Level |
|---|---|---|
| L1C | ||
| Sentinel-2 | MSI | L2A |
| Theia | ||
| Sentinel-3 | OLCI | EFR |
| SLSTR | RBT | |
| Landsat 1–5 | MSS | L1 |
| Landsat 4–5 | TM | |
| Landsat 7 | ETM | |
| Landsat 8–9 | OLI + TIRS | |
| PlanetScope | PS2, PS2-SD, PSB-SD | L1B, L3B Collect Ortho |
| SkySat | SkySat Camera | |
| Pleiades-Neo | Pleiades-Neo Imager | SEN, PRJ, ORT |
| Pleiades SPOT-6/7 | HiRI NAOMI | |
| Vision-1 | Vision-1 optical sensor | PRJ, ORTP |
| WorldView-1 WorldView-2 WorldView-3 WorldView-4 QuickBird-2 GeoEye-1 | WV60 WV110 WV110 SpaceView-110 BGIS-2000 GIS | Standard, Ortho |
| Constellation | Product Type |
|---|---|
| COSMO-Skymed 1st GEN COSMO-Skymed 2nd GEN | SCS, DGM, GEC, GTC |
| ICEYE | SLC, GRD |
| RADARSAT-2 | SLC, SGF, SGX, SCN, SCW, SCF, SCS, SSG, SPG |
| RADARSAT-Constellation Mission | SLC, GRD, GRC, GCC, GCD |
| Sentinel-1 | SLC, GRD |
| SAOCOM | SLC, ID, GEC, GTC |
| TerraSAR-X, TanDEM-X, PAZ SAR | SSC, MGD, GEC, EEC |
| CEMS-RM Product | EO Data (GSD, Area) | Processing Time * | CSI | F1 Score | Precision | Recall |
|---|---|---|---|---|---|---|
| EMSR567: Floods in Queensland, Australia in 2022 AOI 14NOWRA | COSMO-Skymed (3 m, 1634 km²) | 20 min | 0.95 | 0.97 | 0.96 | 0.98 |
| EMSR564: Tropical Cyclone Batsirai in Madagascar in 2022 AOI 01TSIRIBIHINA | RadarSat-2 SLC (5 m, 15,207 km²) | 31 min | 0.79 | 0.88 | 0.93 | 0.84 |
| EMSR564: Tropical Cyclone Batsirai in Madagascar in 2022 AOI 05NOSYVARIKA | WorldView-2 (0.5 m, 36 km²) | 1 min | 0.72 | 0.84 | 0.87 | 0.81 |
| EMSR561: Floods in Malawi in 2022 AOI 03NSANJE | COSMO-Skymed (5 m, 1334 km²) | 7 min | 0.95 | 0.98 | 0.98 | 0.97 |
| EMSR559: Flood in Madagascar in 2022 AOI 03ANTANANARIVO | Pléiades (0.5 m, 665 km²) | 19 min | 0.65 | 0.79 | 0.91 | 0.69 |
| EMSR545: Wildfire in Andalusia, Spain, in 2021 AOI 01JUBRIQUE | Sentinel-2 (10 m, 15,393 km²) | 4 min | 0.92 | 0.96 | 0.93 | 0.99 |
| EMSR542: Forest fire in Lavrio, Eastern Attica, Greece, in 2021 AOI 01LAVRIO | Sentinel-2 (10 m, 951 km²) | 3 min | 0.91 | 0.95 | 0.93 | 0.98 |
| EMSR541: Fire in Var, France, in 2021 AOI 01GONFARON | Sentinel-2 (10 m, 23,003 km²) | 6 min | 0.85 | 0.92 | 0.87 | 0.98 |
| EMSR535: Wildfires in Albania, in 2021 AOI 02MUNELLES | Sentinel-2 (10 m, 12,034 km²) | 3 min | 0.73 | 0.84 | 0.89 | 0.79 |
| EMSR526: Fire in Rhodes island, North Aegean District, Greece, in 2021 AOI 01PSINTHOS | Sentinel-2 (10 m, 10,553 km²) | 3 min | 0.82 | 0.90 | 0.94 | 0.87 |
| EMSR523: Fire in Sardegna region, Italy, in 2021 AOI 07MACOMER | Sentinel-2 (10 m, 11,659 km²) | 3 min | 0.82 | 0.90 | 0.94 | 0.86 |
| EMSR492: Flood in Landes, France, in 2021 AOI 01MONT-DE-MARSAN | Sentinel-1 (10 m, 42,534 km²) | 20 min | 0.81 | 0.89 | 0.89 | 0.90 |
| EMSR479: Flood in Tabasco, Mexico, in 2021 AOI 02VILLAHERMOSA | Sentinel-2 (10 m, 29,021 km²) | 21 min | 0.69 | 0.82 | 0.80 | 0.84 |
| Event | AOI Size (km²) | EO Data | Processing Time * | Outputs |
|---|---|---|---|---|
| Mega-fire Australia 2019 (EMSR408) | 315,000 | Sentinel-2 51 × 2 tiles 78 Gb | 1h00 | Burnt areas (20 m) Cloudy areas (20 m) Post-event image mosaic (100 m) |
| Mega-flood Thailand/Cambodia 2019 | 115,000 | Sentinel-2 25 tiles 15 Gb | 1h04 | Water surfaces (20 m) Cloudy areas (20 m) Post-event image mosaic (100 m) |
| Mega-flood Sweden 2020 (EMSR427) | 150,000 | Sentinel-1 4 images 4 Gb | 0h47 | Water surfaces (20 m) Post-event image (100 m) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maxant, J.; Braun, R.; Caspard, M.; Clandillon, S. ExtractEO, a Pipeline for Disaster Extent Mapping in the Context of Emergency Management. Remote Sens. 2022, 14, 5253. https://doi.org/10.3390/rs14205253
Maxant J, Braun R, Caspard M, Clandillon S. ExtractEO, a Pipeline for Disaster Extent Mapping in the Context of Emergency Management. Remote Sensing. 2022; 14(20):5253. https://doi.org/10.3390/rs14205253
Chicago/Turabian StyleMaxant, Jérôme, Rémi Braun, Mathilde Caspard, and Stephen Clandillon. 2022. "ExtractEO, a Pipeline for Disaster Extent Mapping in the Context of Emergency Management" Remote Sensing 14, no. 20: 5253. https://doi.org/10.3390/rs14205253
APA StyleMaxant, J., Braun, R., Caspard, M., & Clandillon, S. (2022). ExtractEO, a Pipeline for Disaster Extent Mapping in the Context of Emergency Management. Remote Sensing, 14(20), 5253. https://doi.org/10.3390/rs14205253