
A Novel Method of Monitoring Surface Subsidence Law Based on Probability Integral Model Combined with Active and Passive Remote Sensing Data


Abstract
:1. Introduction
2. Materials and Methods
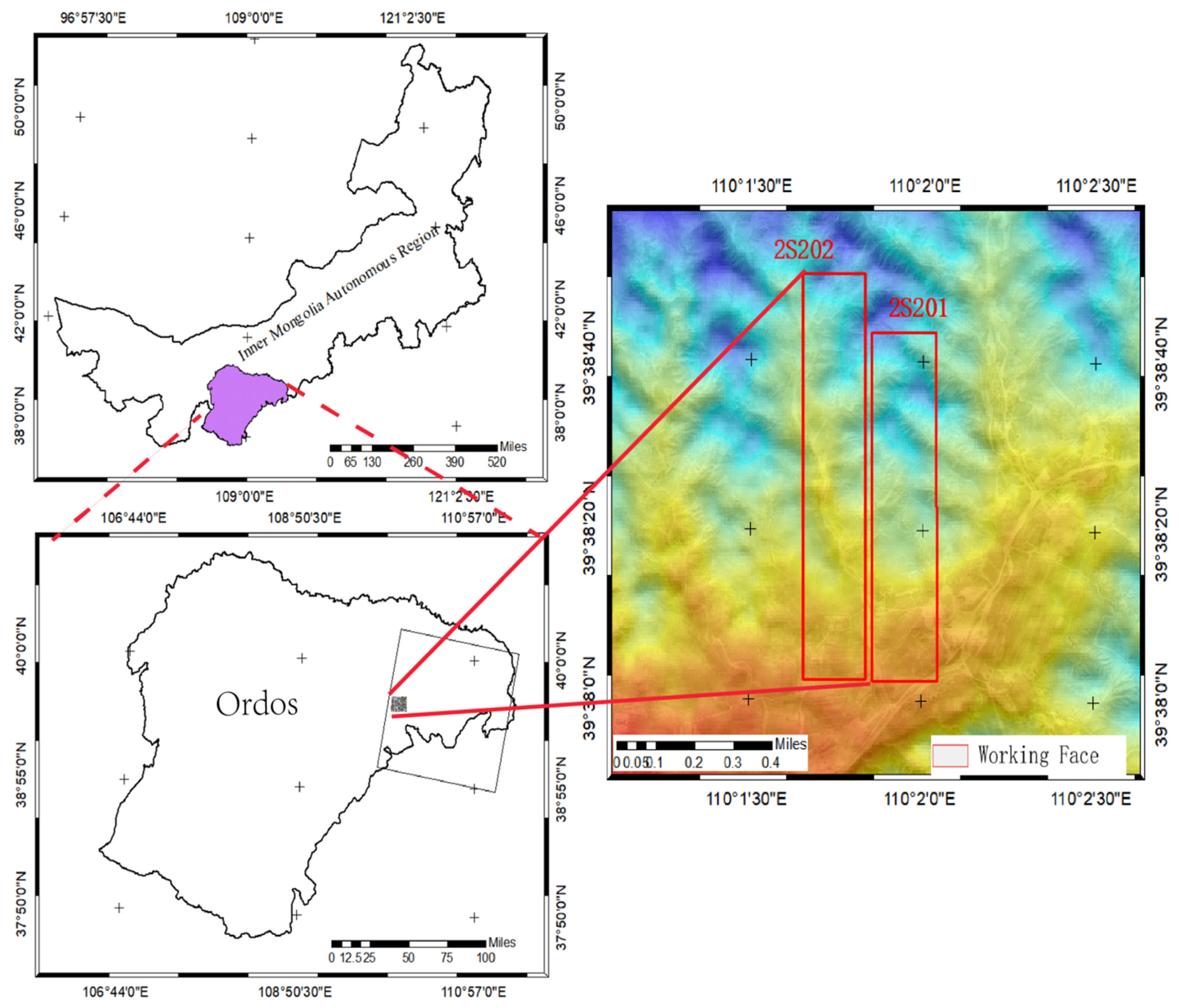
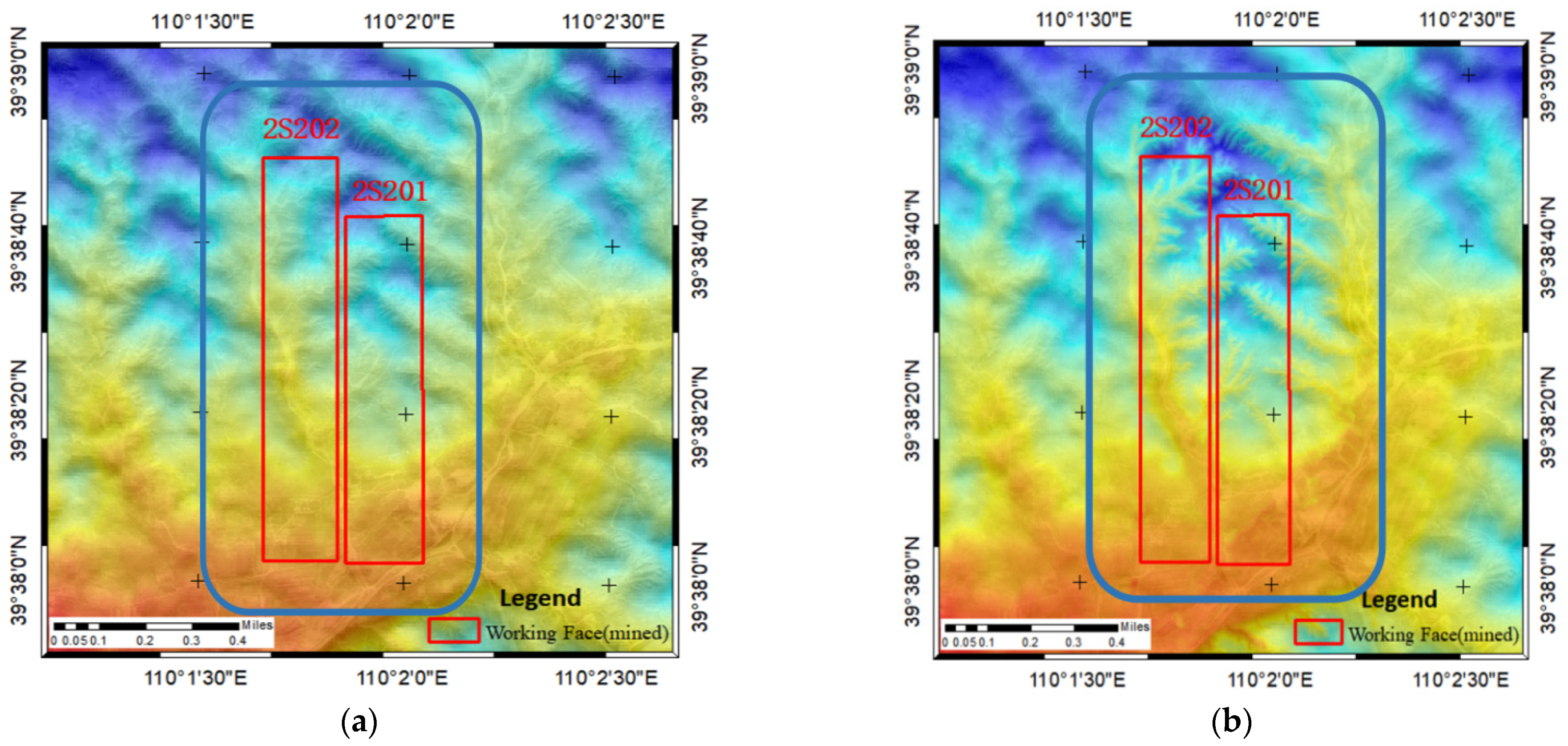
2.1. Study Area and Data
2.2. Probability Integration Method
2.3. Geometry Principle
2.4. UAV Subsidence Monitoring
2.5. Data Fusion Method
3. Results
3.1. Data Fusion Result
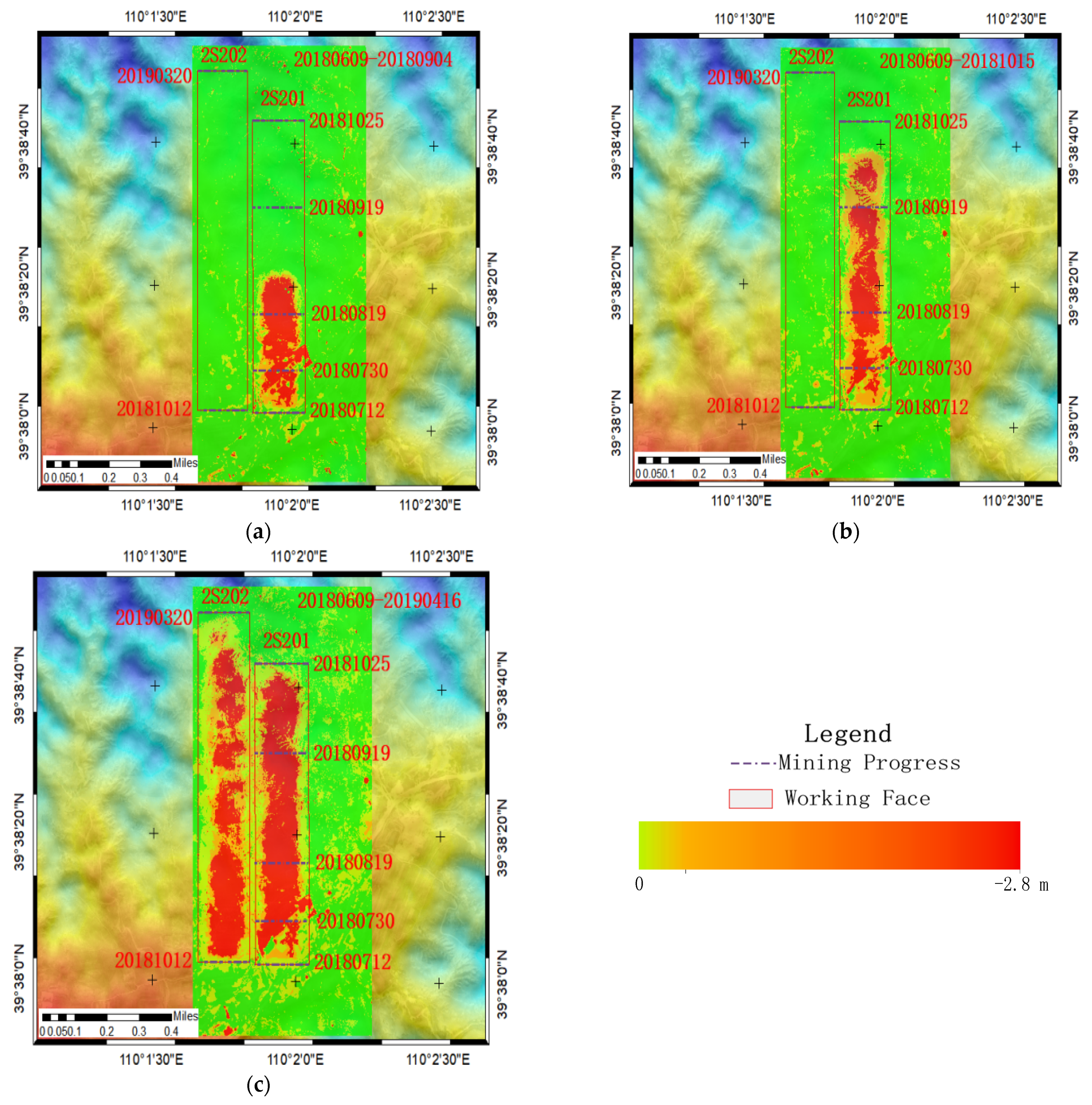
3.2. UAV and InSAR Result
4. Discussion
4.1. Comparative Analysis of Data from InSAR, UAV, and GNSS
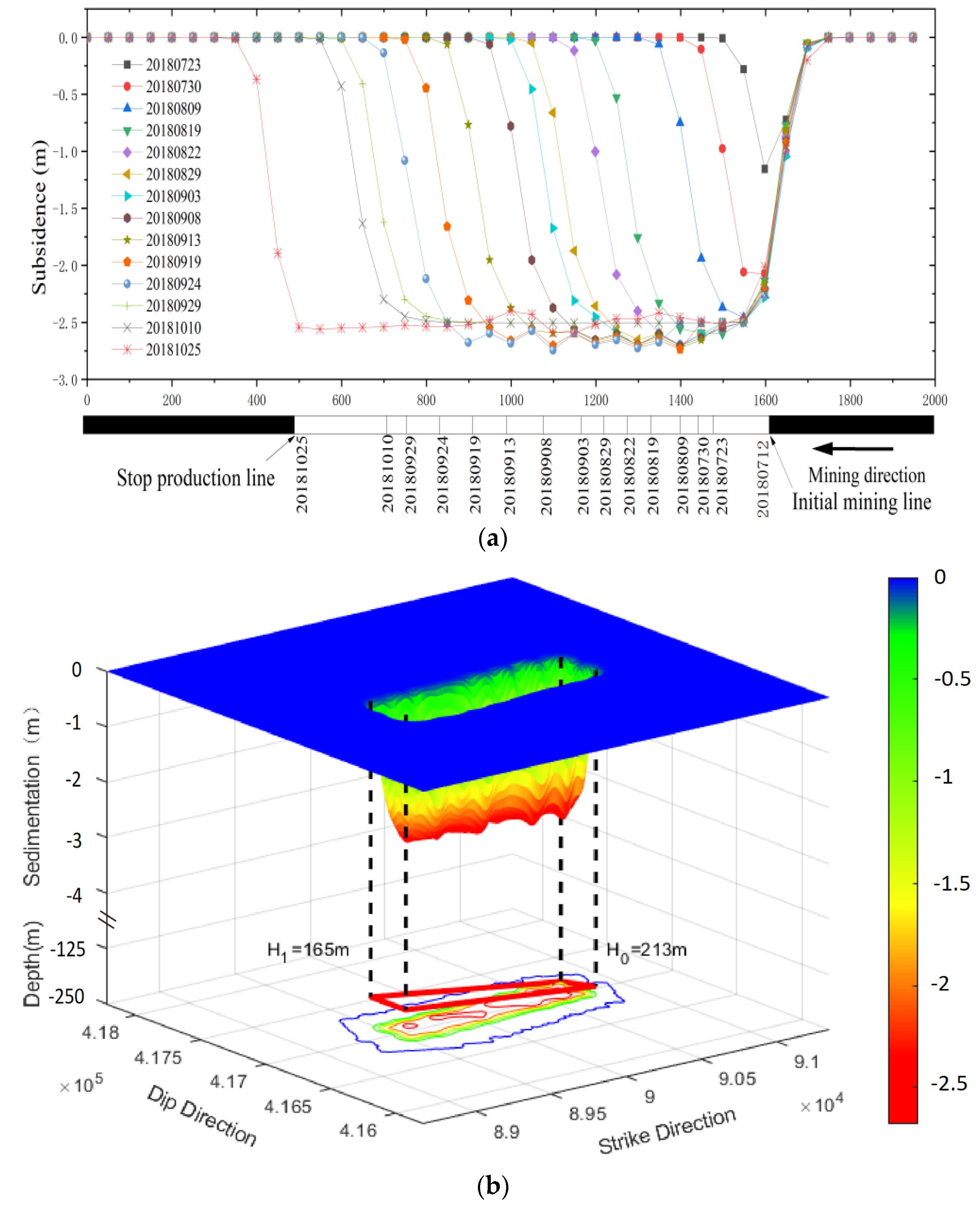
4.2. Analysis of Observation Method and Subsidence Law
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.Z.; Yu, J.H.; Zhang, W.Z. Spatial pattern and governance model of coal mining subsidence area in China. J. Nat. Resour. 2019, 34, 867–880. [Google Scholar]
- Rui, W.; Shuang, W.; Kan, W.; Huang, S.Q.; Wu, R.J.; Liu, B.; Diao, X.P. Estimation and Spatial Analysis of Heavy Metals in Metal Tailing Pond based on Improved PLS with Multiple Factors. IEEE Access 2021, 9, 64880–64894. [Google Scholar] [CrossRef]
- Jung, H.C.; Kim, S.W.; Jung, H.S.; Min, K.D.; Won, J.S. Satellite observation of coal mining subsidence by persistent scatterer analysis. Eng. Geol. 2007, 92, 1–13. [Google Scholar] [CrossRef]
- Tao, Q.X.; Liu, G.L.; Liu, W.K. Analysis of capabilities of L and C-band SAR data to monitor mining-induced subsidence. Diqiu Wuli Xuebao 2012, 55, 3681–3689. [Google Scholar]
- DeNovellis, V.; Castaldo, R.; DeLuca, C.; Pepe, S.; Zinno, I.; Casu, F.; Solaro, G. Source modelling of the 2015 Wolf volcano (Galápagos) eruption inferred from Sentinel 1-A DInSAR deformation maps and pre-eruptive ENVISAT time series. J. Volcanol. Geotherm. Res. 2017, 344, 246–256. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Zhu, J.; Yi, H.; Feng, G.; Hu, J.; Papst, M. Locating and defining underground goaf caused by coal mining from space-borne SAR interferometry. ISPRS J. Photogramm. Remote Sens. 2018, 135, 112–126. [Google Scholar] [CrossRef]
- Zhou, D.W.; Qi, L.Z.; Zhang, D.M.; Zhou, B.H.; Guo, L.L. Unmanned aerial vehicle (UAV) photogrammetry technology for dynamic mining subsidence monitoring and parameter inversion: A case study in China. IEEE Access 2020, 8, 16372–16386. [Google Scholar]
- Wegmuller, U.; Strozzi, T.; Werner, C.; Wiesmann, A.; Benecke, N.; Spreckels, V. Monitoring of mining-induced surface deformation in the Ruhrgebiet (Germany) with SAR interferometry. In Proceedings of the IGARSS 2000, IEEE 2000 International Geoscience and Remote Sensing Symposium, Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No. 00CH37120), Honolulu, HI, USA, 24–28 July 2000; Volume 6, pp. 2771–2773. [Google Scholar]
- Gabriel, A.K.; Goldstein, R.M.; Zebker, H.A. Mapping small elevation changes over large areas: Differential radar interferometry. J. Geophys. Res. Solid Earth 1989, 94, 9183–9191. [Google Scholar] [CrossRef]
- Chul, J.H.; Min, K.D. Observing coal mining subsidence from JERS-1 permanent scatterer analysis. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, IGARSS’05, Seoul, Korea, 29 July 2005; Volume 7, pp. 4578–4581. [Google Scholar]
- Przyłucka, M.; Herrera, G.; Graniczny, M.; Colombo, D.; Béjar-Pizarro, M. Combination of conventional and advanced DInSAR to monitor very fast mining subsidence with TerraSAR-X data: Bytom City (Poland). Remote Sens. 2015, 7, 5300–5328. [Google Scholar] [CrossRef] [Green Version]
- Akcin, H.; Kutoglu, H.S.; Kemaldere, H.; Deguchi, T.; Koksal, E. Monitoring subsidence effects in the urban area of Zonguldak Hardcoal Basin of Turkey by InSAR-GIS integration. Nat. Hazards Earth Syst. Sci. 2010, 10, 1807–1814. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, X.; Lu, Z. Modeling PSInSAR time series without phase unwrapping. IEEE Trans. Geosci. Remote Sens. 2010, 49, 547–556. [Google Scholar] [CrossRef]
- Abdikan, S.; Arıkan, M.; Sanli, F.B.; Cakir, Z. Monitoring of coal mining subsidence in peri-urban area of Zonguldak city (NW Turkey) with persistent scatterer interferometry using ALOS-PALSAR. Environ. Earth Sci. 2014, 71, 4081–4089. [Google Scholar] [CrossRef]
- Bateson, L.; Cigna, F.; Boon, D.; Sowter, A. The application of the Intermittent SBAS (ISBAS) InSAR method to the South Wales Coalfield, UK. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E.A. small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, L.; Ding, X.; Hu, J.; Liang, H. Investigation of slow-moving landslides from ALOS/PALSAR images with TCPInSAR: A case study of Oso, USA. Remote Sens. 2015, 7, 72–88. [Google Scholar] [CrossRef]
- Zhang, L.; Sun, Q.; Hu, J. Potential of TCPInSAR in Monitoring Linear Infrastructure with a Small Dataset of SAR Images: Application of the Donghai Bridge, China. Appl. Sci. 2018, 8, 425. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhang, J.; Wu, H.; Lu, Z.; Guangtong, S. Monitoring of urban subsidence with SAR interferometric point target analysis: A case study in Suzhou, China. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 812–818. [Google Scholar] [CrossRef]
- Niu, Y.C.; Zhao, Q.; Zhang, W.; Zhu, C.; Yang, Z.L. Research on CR-based offset technique for mining deformation monitoring. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2893–2896. [Google Scholar]
- Wang, L.; Deng, K.; Zheng, M. Research on ground deformation monitoring method in mining areas using the probability integral model fusion D-InSAR, sub-band InSAR and offset-tracking. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101981. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, H.; Wang, L. Monitoring of surface deformation in a low coherence area using distributed scatterers InSAR: Case study in the Xiaolangdi Basin of the Yellow River, China. Bull. Eng. Geol. Environ. 2021, 80, 25–39. [Google Scholar] [CrossRef]
- Michel, R.; Avouac, J.P.; Taboury, J. Measuring ground displacements from SAR amplitude images:Application to the Landers earthquake. Geophys. Res. Lett. 1999, 26, 875–878. [Google Scholar] [CrossRef] [Green Version]
- Strozzi, T.; Kouraev, A.; Wiesmann, A.; Wegmüller, U.; Sharov, A.; Werner, C. Estimation of Arctic glacier motion with satellite L-band SAR data. Remote Sens. Environ. 2008, 112, 636–645. [Google Scholar] [CrossRef]
- Zhao, C.; Lu, Z.; Zhang, Q. Time-series deformation monitoring over mining regions with SAR intensity-based offset measurements. Remote Sens. Lett. 2013, 4, 436–445. [Google Scholar] [CrossRef]
- Fan, H.; Gao, X.; Yang, J.; Deng, K.; Yu, Y. Monitoring mining subsidence using a combination of phase-stacking and offset-tracking methods. Remote Sens. 2015, 7, 9166–9183. [Google Scholar] [CrossRef] [Green Version]
- Fan, H.D.; Cheng, D.; Deng, K.Z.; Chen, B.Q.; Zhu, C.G. Subsidence monitoring using D-InSAR and probability integral prediction modelling in deep mining areas. Surv. Rev. 2015, 47, 438–445. [Google Scholar] [CrossRef]
- Wang, L.Y.; Deng, K.Z.; Fan, H.D.; Zhou, F.P. Monitoring of large-scale deformation in mining areas using sub-band InSAR and the probability integral fusion method. Int. J. Remote Sens. 2019, 40, 2602–2622. [Google Scholar] [CrossRef]
- Fuquan, T.; Zuxi, C.; Hanying, W. Application of GPS/InSAR fusion technology in dynamic monitoring of mining subsidence in western mining areas. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; pp. 2420–2423. [Google Scholar]
- Zhou, W.; Zhang, W.; Yang, X.; Wu, W. An Improved GNSS and InSAR Fusion Method for Monitoring the 3D Deformation of a Mining Area. IEEE Access 2021, 9, 155839–155850. [Google Scholar] [CrossRef]
- Mukherjee, S.; Zimmer, A.; Sun, X.; Ghuman, P.; Cheng, I. An Unsupervised Generative Neural Approach for InSAR Phase Filtering and Coherence Estimation. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1971–1975. [Google Scholar] [CrossRef]
- Hlotov, V.; Hunina, A.; Siejka, Z. Accuracy investigation of creating orthophotomaps based on images obtained by applying Trimble-UX5 UAV. Rep. Geod. Geoinform. 2017, 103, 106–118. [Google Scholar] [CrossRef] [Green Version]
- Kratzsch, H. Mining subsidence engineering. Environ. Geol. Water Sci. 1986, 8, 133–136. [Google Scholar] [CrossRef]
- Whittaker, B.N.; Reddish, D.J. Subsidence: Occurrence, Prediction and Control. Dev. Geotech. Eng. 1989, 56, 528. [Google Scholar]
- Li, G.; Yang, Q. Prediction of mining subsidence in shallow coal seam. Math. Probl. Eng. 2020, 2020, 7956947. [Google Scholar]
- Lian, X.; Zhang, Y.; Yuan, H.; Wang, C.; Guo, J.; Liu, J. Law of Movement of Discontinuous Deformation of Strata and Ground with a Thick Loess Layer and Thin Bedrock in Long Wall Mining. Appl. Sci. 2020, 10, 2874. [Google Scholar] [CrossRef] [Green Version]
- Sillerico, E.; Marchamalo, M.; Rejas, J.G.; Martínez, R. La técnica DInSAR:bases y aplicación a la medición de subsidencias del terreno en la construcción. Inf. Construcción 2010, 62, 47–53. [Google Scholar] [CrossRef]
- He, X.F.; He, M. The InSAR Pair-to-Ground Observation Data Processing Method; Science Press: Beijing, China, 2012. [Google Scholar]
- Pham, H.T.; Marshall, L.; Johnson, F.; Sharma, A. A method for combining SRTM DEM and ASTER GDEM2 to improve topography estimation in regions without reference data. Remote Sens. Environ. 2018, 210, 229–241. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing:A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Farr, T.G.; Kobrick, M. Shuttle radar topography mission produces a wealth of data. Eos Trans. 2000, 81, 583–585. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | UAV | Camera | Course Overlap% | Lateral Overlap% | Row Height | Collection Date |
|---|---|---|---|---|---|---|
| 1 | Trimble UX5 | SONY A5100 | 80 | 80 | 23 | 9 June 18 |
| 2 | 4 September 18 | |||||
| 3 | 16 October 18 | |||||
| 4 | 16 April 19 |
| No. | Product | Beam Model | Polarization | Resolution/(m) | Acquisition Date | Pixel Center | Mean Incident Angle (°) |
|---|---|---|---|---|---|---|---|
| (Rng × Az) | Lat-Lng (°) | ||||||
| 1 | SLC | Wide Multi-look Fine | HH | 2.6 × 2.4 | 9 June 18 | 39.5841–110.5944 | 35.2230 |
| 2 | 27 July 18 | 39.5852–110.5950 | 35.2232 | ||||
| 3 | 20 August 18 | 39.5851–110.5961 | 35.2224 | ||||
| 4 | 24 November 18 | 39.591–110.5977 | 35.2128 | ||||
| 5 | 11 January 19 | 39.5892–110.5969 | 35.2129 | ||||
| 6 | 4 February 19 | 39.5627–110.5903 | 35.2124 | ||||
| 7 | 28 February 19 | 39.5729–110.5952 | 35.2165 | ||||
| 8 | 24 March 19 | 39.5899–110.5995 | 35.2207 | ||||
| 9 | 17 April 19 | 39.5880–110.5955 | 35.2223 |
| No. | InSAR (m) | UAV (m) | Fusion (m) | GNSS (m) | InSAR/GNSS (m) | UAV/GNSS (m) | Fusion/GNSS (m) |
|---|---|---|---|---|---|---|---|
| 1 | −0.051 | −0.042 | −0.187 | −0.174 | −0.123 | −0.132 | 0.013 |
| 2 | −0.062 | −1.158 | −1.409 | −1.304 | −1.242 | −0.146 | 0.105 |
| 3 | −0.106 | −1.297 | −1.495 | −1.388 | −1.282 | −0.091 | 0.107 |
| 4 | −0.152 | −2.52 | −2.628 | −2.542 | −2.39 | −0.022 | 0.086 |
| 5 | −0.098 | −0.096 | −0.154 | −0.111 | −0.013 | −0.015 | 0.043 |
| 6 | −0.113 | −0.475 | −0.561 | −0.507 | −0.394 | −0.032 | 0.054 |
| 7 | −0.034 | −0.091 | −0.156 | −0.077 | −0.043 | 0.014 | 0.079 |
| 8 | −0.131 | −0.01 | −0.284 | −0.164 | −0.033 | −0.154 | 0.12 |
| 9 | −0.178 | −2.131 | −2.529 | −2.323 | −2.145 | −0.192 | 0.206 |
| 10 | −0.150 | −2.646 | −2.724 | −2.668 | −2.518 | −0.022 | 0.056 |
| 11 | −0.047 | −1.817 | −1.925 | −1.857 | −1.81 | −0.04 | 0.068 |
| 12 | −0.087 | −1.235 | −1.291 | −1.146 | −1.059 | 0.089 | 0.145 |
| Medium Error | 1.426 | 0.099 | 0.103 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wu, K.; He, Q.; He, Y.; Gu, Y.; Wu, S. A Novel Method of Monitoring Surface Subsidence Law Based on Probability Integral Model Combined with Active and Passive Remote Sensing Data. Remote Sens. 2022, 14, 299. https://doi.org/10.3390/rs14020299
Wang R, Wu K, He Q, He Y, Gu Y, Wu S. A Novel Method of Monitoring Surface Subsidence Law Based on Probability Integral Model Combined with Active and Passive Remote Sensing Data. Remote Sensing. 2022; 14(2):299. https://doi.org/10.3390/rs14020299
Chicago/Turabian StyleWang, Rui, Kan Wu, Qimin He, Yibo He, Yuanyuan Gu, and Shuang Wu. 2022. "A Novel Method of Monitoring Surface Subsidence Law Based on Probability Integral Model Combined with Active and Passive Remote Sensing Data" Remote Sensing 14, no. 2: 299. https://doi.org/10.3390/rs14020299
APA StyleWang, R., Wu, K., He, Q., He, Y., Gu, Y., & Wu, S. (2022). A Novel Method of Monitoring Surface Subsidence Law Based on Probability Integral Model Combined with Active and Passive Remote Sensing Data. Remote Sensing, 14(2), 299. https://doi.org/10.3390/rs14020299