1. Introduction
Radar is a highly robust and reliable sensor for automotive applications [
1]. First, automotive radars measure the relative distance, velocity, and angle of targets through time delay and phase shift of radio signals, and therefore can perform well in adverse weather conditions. Second, automotive radars operate in the millimeter wave band and have a large bandwidth; hence, a high range resolution of 3 cm can be achieved [
2]. In addition, the radar system is both simple and effective, using linear frequency-modulated continuous wave (FMCW) technology [
3]. Therefore, automotive FMCW radar has the advantageous benefits of small size, light weight, and low power consumption, and is widely used in self-driving vehicle applications [
4].
Active signal transmission is one of the advantages of radar; however, it can cause serious interference problems with neighboring radars [
5,
6,
7]. Similar to non-homogeneous clutter [
8,
9], radar target detection performance is degraded by incoherent interference. The interference probability can be reduced by alternating the parameters of radar waveforms [
10]. Although different FMCW radars use different parameters, incoherent interference can occur when the spectrum of the interfering signal overlaps the transmitted wave of the radar under test. The incoherent interference produces strong noise and even ghost targets. Consequently, suppressing the incoherent interference in radar images is one of the most pressing issues for automotive FMCW radars.
Although the mitigation of incoherent interference remains an open problem, several interference mitigation approaches have been proposed. The first type of approach aims to design radar waveforms to overcome the drawbacks of FMCW radar with a fixed time–frequency relationship. Orthogonal pseudo-random noise waveforms can be designed to reduce the probability of interference [
11,
12]. Phase-modulated continuous wave (PMCW) [
5] and phase-coded frequency-modulated continuous wave (PC-FMCW) [
13] approaches have been successively proposed to avoid interference with FMCW radars. However, mutual interference can nevertheless appear between PMCW and FMCW radars.
In order to be applicable to FMCW radar images, signal post-processing techniques have been used to develop interference suppression methods [
14]. Brooker [
15] deals with interference by inverse cosine windowing and substituting zeros for the high-amplitude transient. Before removal of transient interference by substituting zeros over the period of interference, accurate interference detection is required in order to determine the location of the interference. Neemat et al. [
16] first used image processing techniques to detect interference in the short-time Fourier transform (STFT) domain, then carried out beat signal model parameters estimation analysis using autoregression in the STFT. Finally, they replaced suppressed beat–frequency frames with linear-predicted interpolated ones. Jung et al. [
17] applied an order statistics–constant false alarm rate (OS-CFAR) algorithm to identify the interference regions. Then, the Kalman filter was used to estimate the state and predict the signals in the interference region. After filtering of the signal, large peaks in the time domain beat signal were reduced and the target signal was estimated. Wang et al. [
18] first cut out the interference-contaminated region of the received signal, then interpolated the signal samples in the cutout segment using the matrix-pencil method.
Unlike the above-mentioned methods of zeroing or reconstructing the signal for interference-contaminated areas, processing of the entire received signal is another technical route to interference suppression. Lee et al. [
19] considered the low-intensity target signal as the noise component to be removed and the high-intensity pulse-like interference signal as the signal to be retained. Using a wavelet transform and thresholding the wavelet coefficients of the low-pass filter output, they were able to extract the pulse-like interference signal. Afterwards, the interference signal was subtracted from the original low-pass filter output to generate the desired target signals. The beat frequencies of real targets always present a positive frequency, whereas only the noise and the interference are in the negative half of the frequency spectrum. Thus, Jin and Cao [
20] calculated the power of the negative frequency as a reference of interference and fed the positive frequency and negative frequency components into the primary and reference channel, respectively, of an adaptive noise canceler (ANC). Wu et al. [
21] proposed an iterative modified threshold method based on empirical mode decomposition (IMT-EMD) for interference suppression in FMCW automotive radars, and applied the consecutive mean square error algorithm to determine the interference-dominated components after decomposing. Specifically, the interference problem can be considered as the sum of two component signals, i.e., the target signal plus the interfering signal. Therefore, interference reduction can be achieved by separating the interfering signal from the received signal. From this perspective, [
22] developed an interference mitigation technique to successfully separate the interference from the received signal in the tunable Q-factor wavelet transform domain. Uysal [
23] applied morphological component analysis (MCA) [
24] theory to decompose the received signal into interference and target signals. Rock et al. [
25] evaluated a convolution neural network (CNN)-based method for carrying out interference reduction on real FMCW radar measurements by combining real measurements with simulated interference in order to obtain input–output data suitable for training their CNN model.
In summary, the incoherent interference problem is a pressing problem in automotive FMCW radars that considerably negates the inherent advantages of radar by decreasing the detection probability and reliability of sensors. Although this challenge has been investigated and several aforementioned approaches have been developed in this field, there remains a need for an efficient solution that can help to mitigate the strong interference in radar images. The contributions of this work to this problem can be summarized as follows:
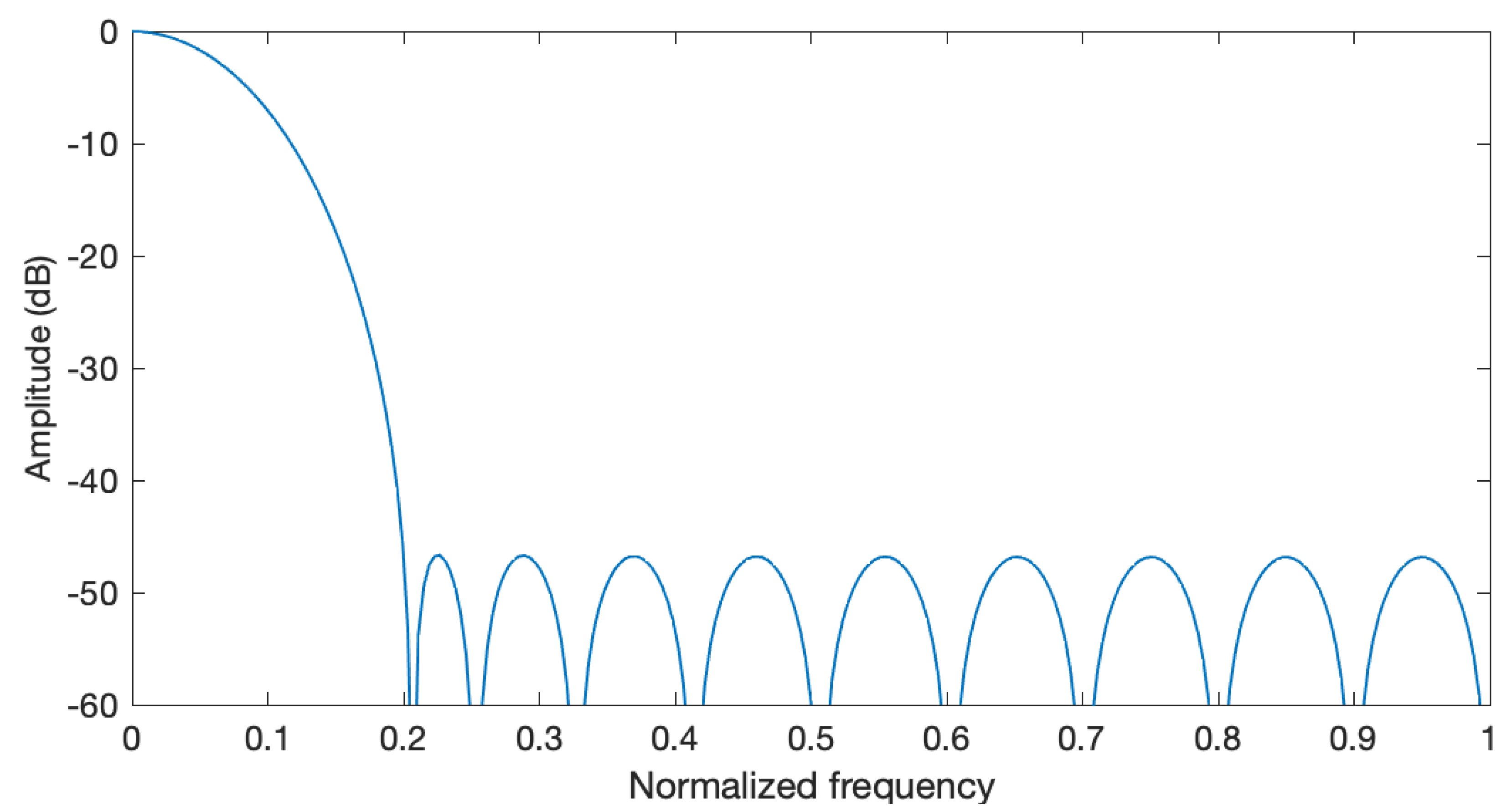
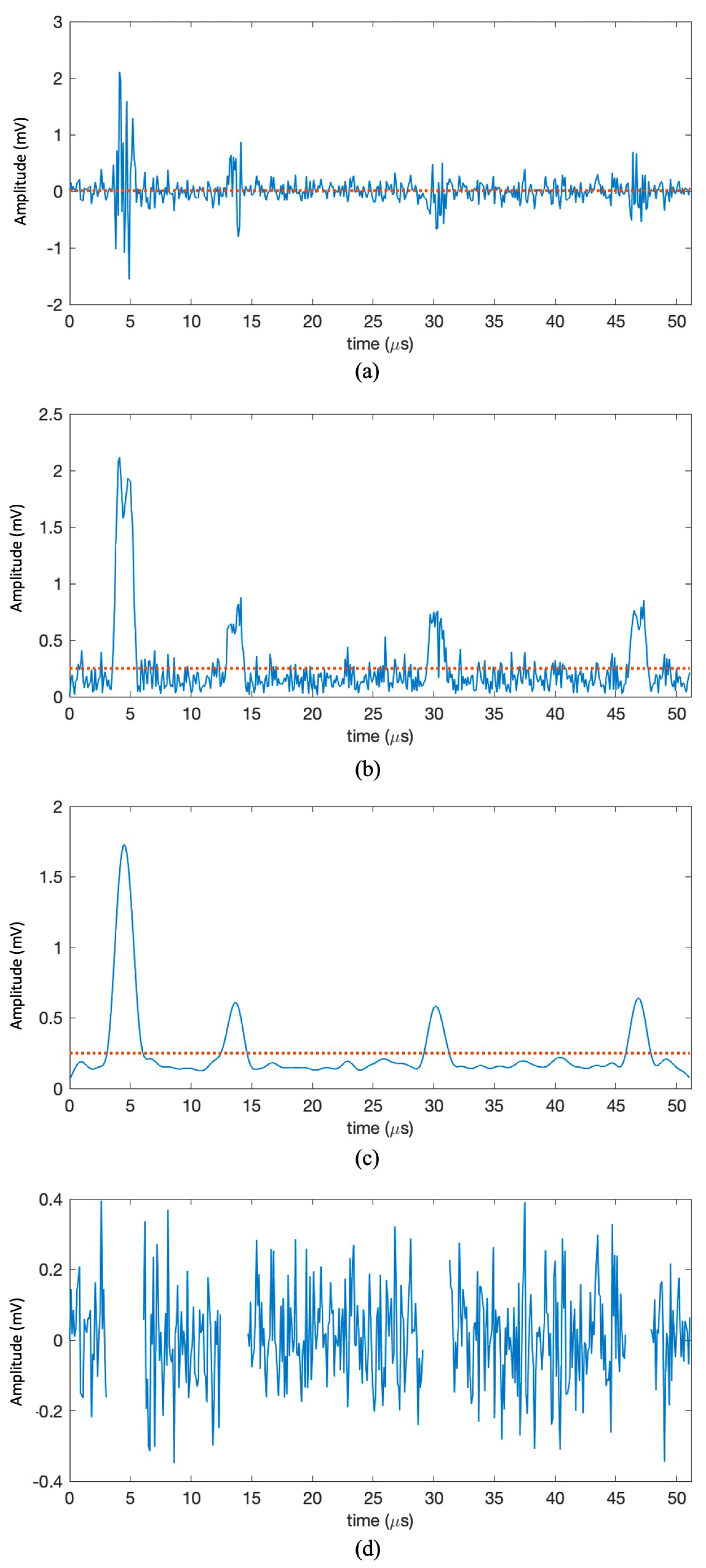
A simple yet effective interference detection technique using a low-pass filter is presented, and the presence of interference is further determined from the statistics of the output envelope of this filter. In this way, the results of interference detection can indicate the presence or absence of interference. We propose an interference mitigation algorithm that cannot be started in the absence of interference, which significantly increases real-time processing performance.
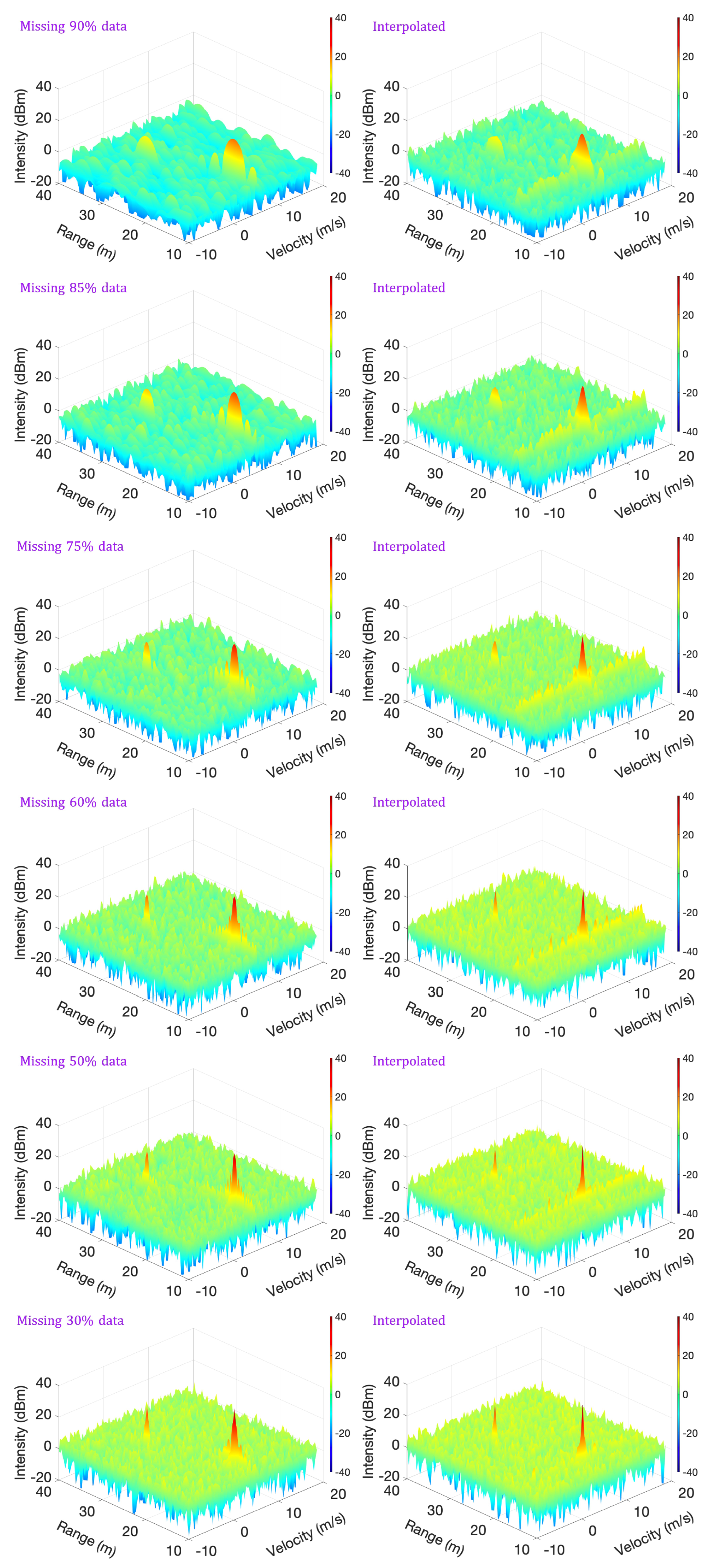
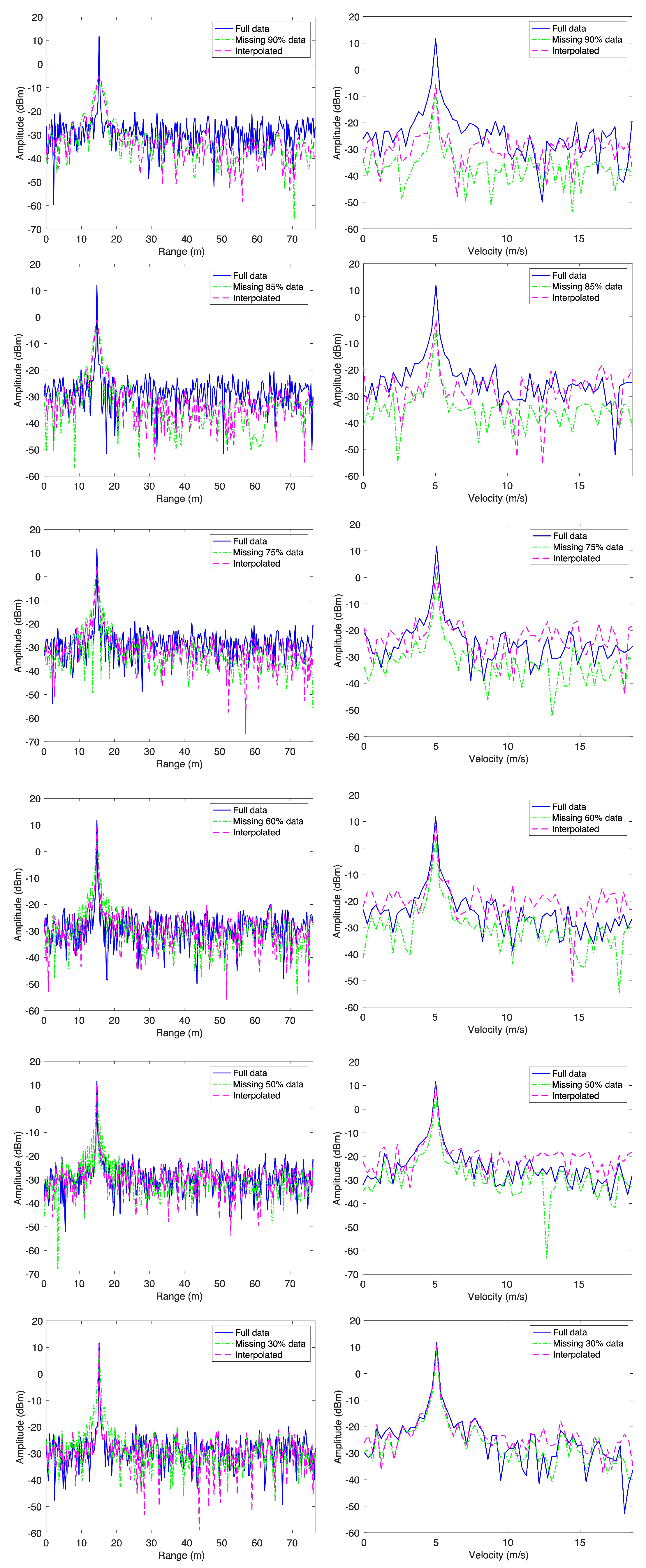
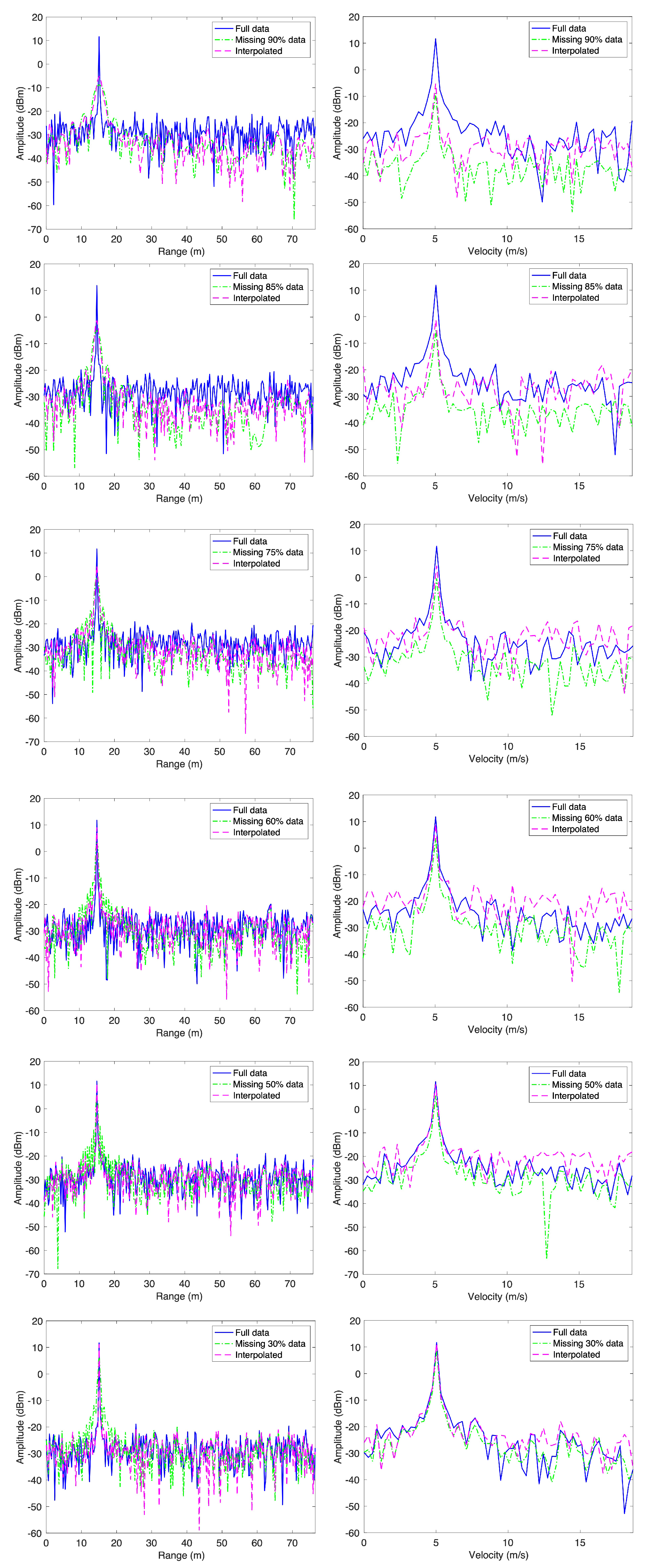
A sparsity model is presented to reduce the incoherent interference by considering the interference regions as missing data. Using L1 norm-regularized least squares, an alternating direction method of multipliers (ADMM)-based technique is been derived to restore the radar echoes.
In several comparison experiments, dynamic incoherent interference is generated; the case of dynamic interference is much closer to the real-world self-driving situation. In experiments with dynamic interference signals, the comparative performance of different algorithms is comprehensively evaluated and the potential use of the algorithms in real roads is further analyzed.
In addition, both the wavelet-based [
19] and the MCA-based [
23] methods are improved when using our proposed interference envelop detection approach.
Our extensive experiments demonstrate that the proposed method significantly outperforms the state-of-the-art methods on both simulated and real radar interference mitigation tasks.
The rest of this paper is outlined as follows.
Section 2 introduces the formulations related to the incoherent interference between FMCW radars.
Section 3 proposes detection and mitigation of incoherent interference.
Section 4 demonstrates the extensive measurements used to compare the proposed techniques with state-of-the-art methods.
Section 5 discusses sparsity-based methods, algorithm complexity, and the impact on performance of interference regions that lead to missing data components. Finally, we present our conclusions in
Section 6.
2. Incoherent Interference
According to recommendations by the International Telecommunication Union (ITU), most automotive radars currently operate within the 76–81 GHz bandwidth with FMCW signals [
26]. The transmitted radar signal
can be written as follows:
where
t is time,
is the amplitude of the transmitted signal,
is the center frequency of the radar, and
is the chirp rate. Suppose a vehicle at a distance
R meters from the radar is driving at a speed
v m/s; then, the corresponding radar echo is described as
where
is the amplitude of the echo, the delay time
, and
c is the velocity of light.
After the dechirp operation, the received signal is expressed as
where
is the amplitude of the received signal and
is the phase that includes the target Doppler information. The frequency of the target signal with respect to time
t is further derived as
If the neighboring radars and the radar under test have the same transmit waveform, then coherent interference may appear; false targets are generated when this type of interference signal enters the radar receiver baseband. Fortunately, this kind of interference is very unlikely to happen because the phase noise between the radar under test and interfering radars is not correlated. The transmitted signal of a neighboring radar is formulated as
where
is the time offset with the radar under test as the reference,
is the amplitude,
is the center frequency, and
is the chirp rate for the neighboring radar.
When the transmitted signal of the neighboring radar passes through the receiver of the radar under test, the interfering signal after dechirping is
where
and
are the amplitude and residual phase of the interfering signal, respectively. According to the above equation, the frequency of the interfering signal with respect to time
t is
It can be seen that the above interfering signal is a linear FM signal, which is called incoherent interference. The part of the interfering signal with a frequency below half of the radar receiver sampling frequency is fully sampled, and the rest above it is undersampled.
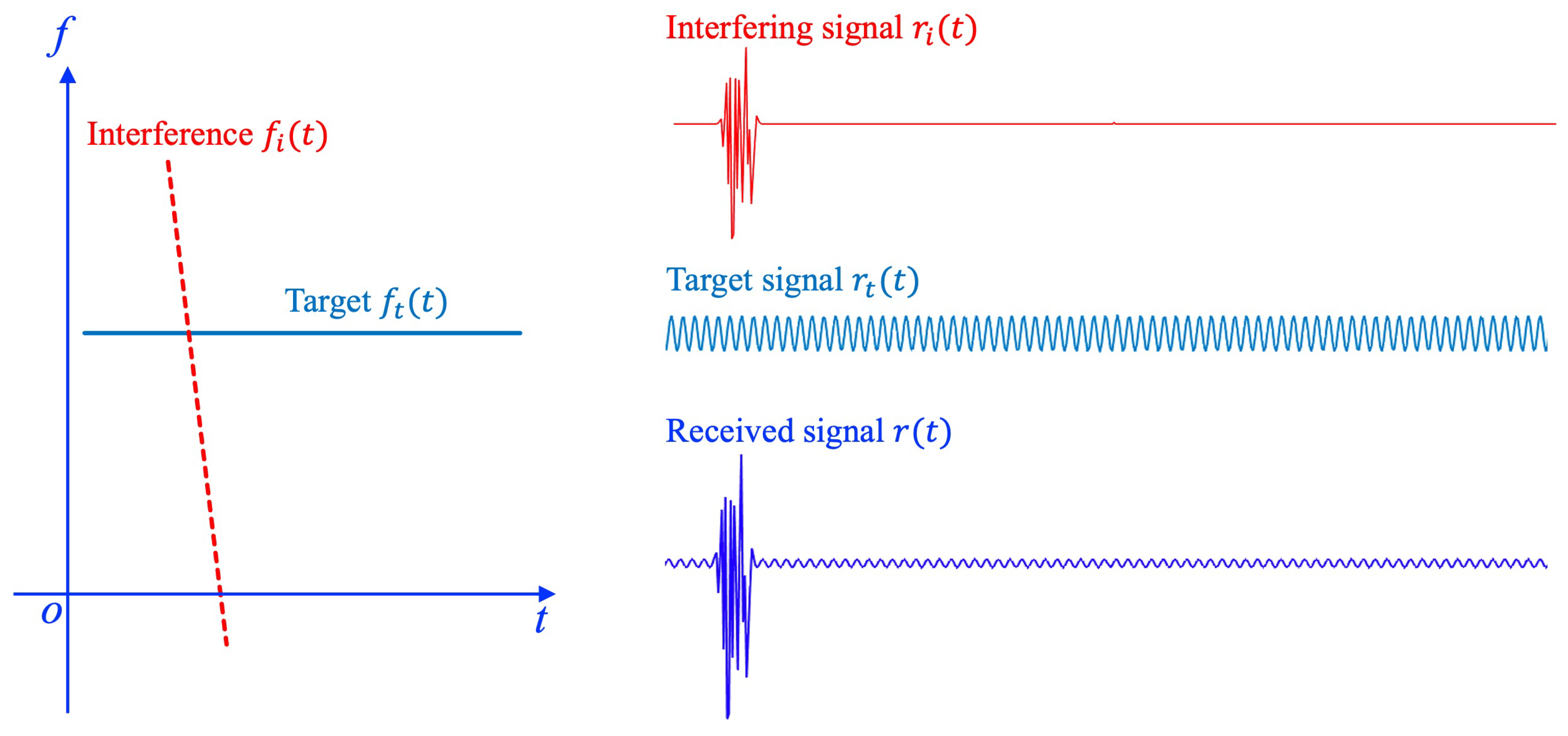
The total received signal can be considered as the sum of the target signal and the interfering signal, that is,
, as shown in
Figure 1. It is worth mentioning that the power of the target signal is proportional to
while the amplitude of the interference is proportional to
, where
a is a factor that describes the multi-path transmission of the interfering signal and
is the distance between the interfering radar and the radar under test. Low-intensity incoherent interference signals have little effect on radar performance, and only raise the noise floor. In this work, the intensity of the interfering signal is considered to be stronger than that of the target signal, which makes it difficult to suppress the interference. Therefore,
.
4. Validation Experiments
In the following experiments, the proposed technique is compared with three state-of-the-art methods. The first approach is one of the simplest ubiquitous signal processing methods, substituting zeros for the interference regions [
15]. The second one represents a more advanced signal processing method using a three-level Haar wavelet with the hard thresholding approach [
19]. The final comparison is a sparsity-based MCA method that uses DFT and STFT bases to separate the interfering and target signals, respectively [
23]. In the following comparison experiments, the parameters of the wavelet-based and MCA-based methods are set according to references [
19] and [
23], respectively.
Furthermore, both the wavelet-based [
19] and MCA-based [
23] methods are improved using the proposed interference envelop detection. Specifically, based on the results of our proposed interference envelope detection method, only the signals in the interference regions are replaced by the outputs of the wavelet and MCA methods.
The comparisons are divided into three groups: stationary interference experiments, dynamic interference experiments, and real radar interference experiments. The first two types of experiments are implemented by simulations. In the following experiments, both the radar under test and the interfering radar are static and the targets are moving. For the stationary interference experiments, the timing between the victim and interfering radars is synchronized, and the jamming appears in the same area of the received signal. In practice, timing synchronization between radars rarely occurs due to relative motion between the radar under test and the interfering radar, making dynamic interference common. As a result, interference appears in different regions in the received signal of the radar under test. Due to the constraints of the experimental conditions, the radar senors in the described experiments are static; however, the timing between the victim and interfering radars is set asynchronously in order to simulate dynamic interference.
Additionally, thermal noise is added to the simulated signals. The power of the noise was calculated as , where is Boltzman’s constant, is the noise temperature, and B is the bandwidth of the radar receiver.
In the case of one-dimensional signals, the signal to interference plus noise ratio (SINR) is used to objectively evaluate the performance of interference suppression. However, for two-dimensional radar images, the radar target is focused through two dimensional range and Doppler domains. Therefore, the peak intensity of the target to interference plus noise ratio (PTINR) is defined here as an objective evaluation index for interference mitigation. Using the peak intensity of the focused target, the PTINR is defined as
where
is the peak intensity (power) of the focused target and
is the power of the interference.
In addition, the subjective evaluation of radar images is mainly based on the quality of the focused target, sidelobes of the focused target, noise floor level, and residual interference distribution as comparative details.
4.1. Simulations
Table 1 provides the simulation parameters for the incoherent interference experiments. Two interfering sources are developed with different start frequencies and chirp rates. The distances of the two interfering sources are 30 m and 50 m from the radar under test, respectively. All the radar sensors are active at the same time. The RCS is 1 m
and 3 m
for two radar targets at 15 m and 30 m, respectively. The target located at 15 m is moving at 5 m/s, while the other target is static. As shown in
Figure 6, there are four interference regions present in the received signal.
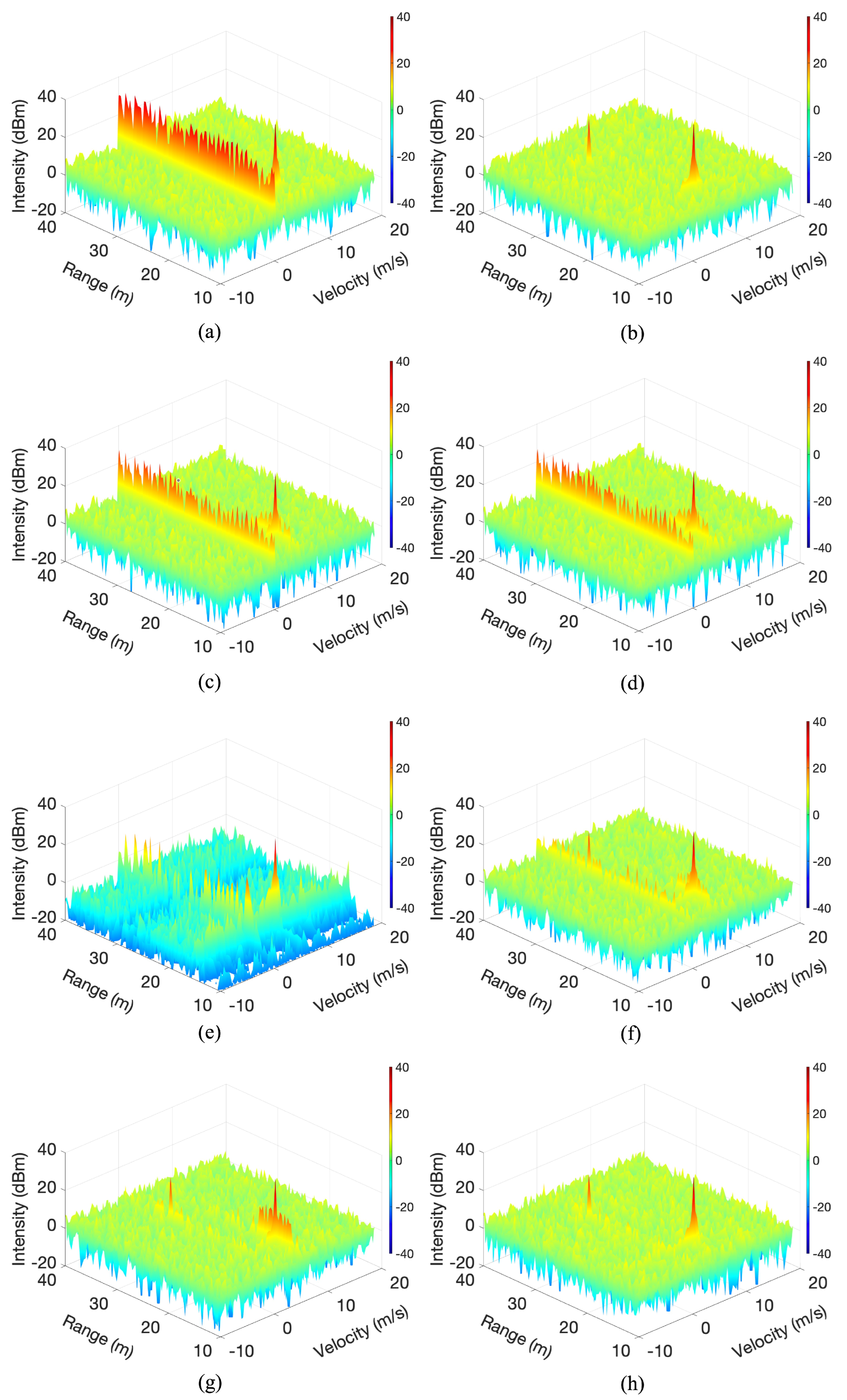
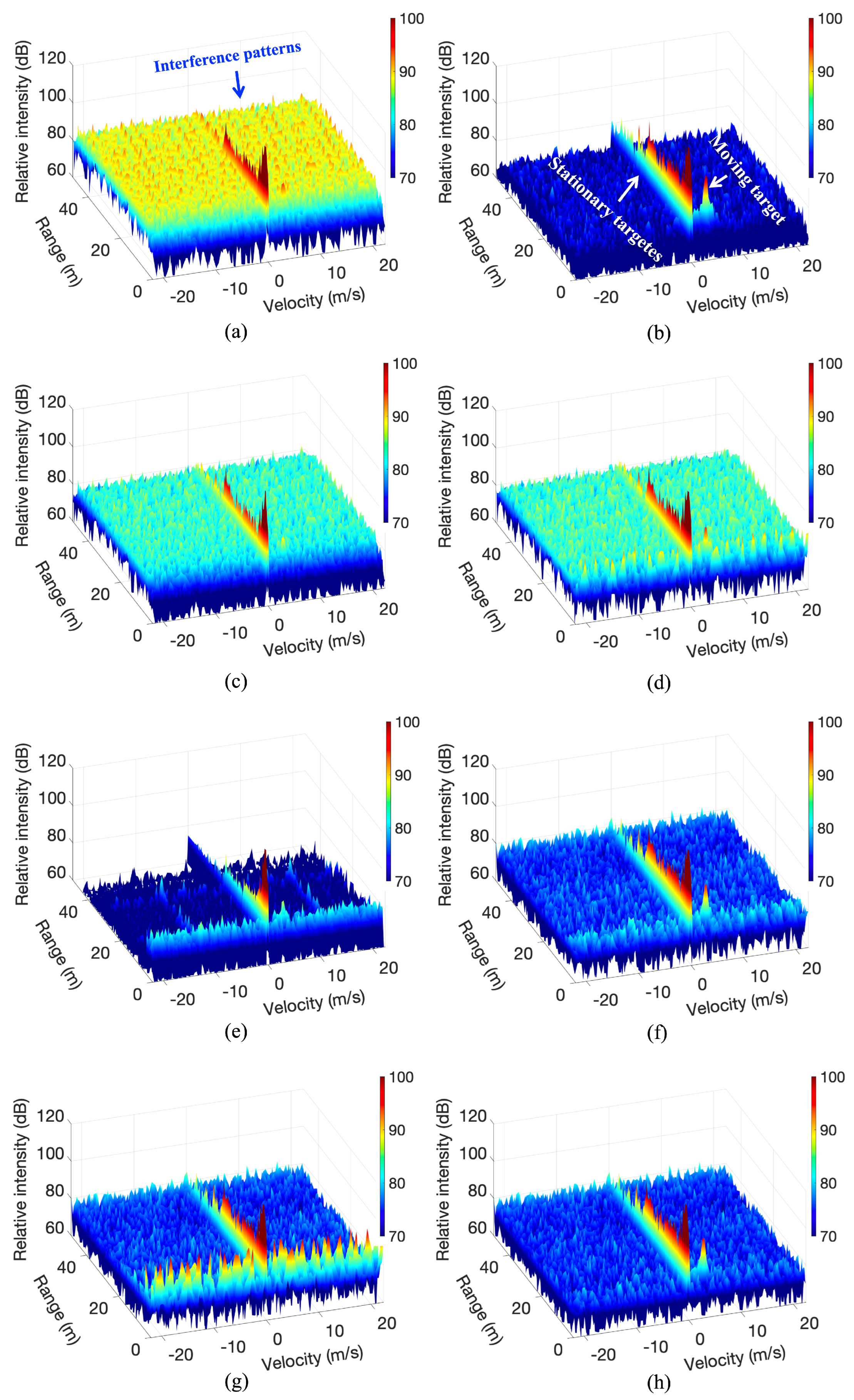
Figure 7 illustrates the comparative stationary interference experiments. According to
Figure 7a, the stationary interference is distributed on the axis of zero velocity of the focused image, causing the second target to be completely swamped by the large amount of strong noise generated on this axis. Traditional signal processing-based methods such as the ANC and wavelet-based methods are able to suppress the interfering signal to a certain extent. However, the interfering signal is much stronger than the target signal, making it difficult to suppress the interference by traditional signal processing methods, as shown in the plots.
Figure 7c illustrates that the wavelet-based approach has difficulty suppressing this strong interference. Using the proposed interference envelope method, the improved wavelet-based method does not perform better; see
Figure 7d. This means that the reference regions have not been successfully recovered. Although the MCA method provides slightly better results (
Figure 7e), there is a considerable amount of interference energy left in the zero velocity axis, resulting in failure to detect the second radar target. After introducing the proposed interference envelope detection method to improve the MCA method, both targets are successfully recovered and the interference signal energy is more effectively eliminated, as shown in
Figure 7f.
Figure 7g shows that the simple zero-setting method avoids the interfering signal. However, due to the loss of the target signal in the interfering regions, it leads to strong sidelobes in the focused image. According to
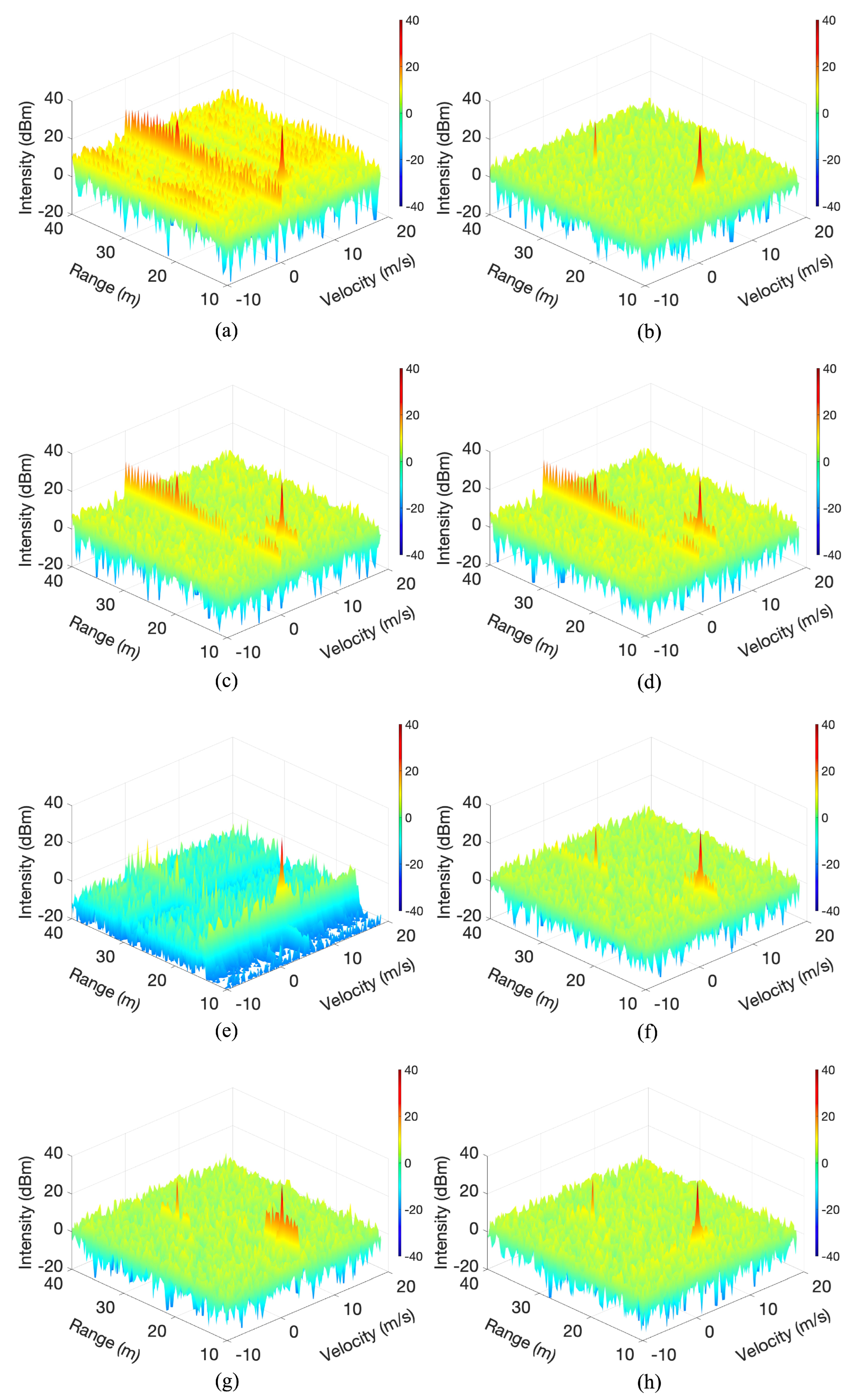
Figure 7h, the proposed method produces a promising focused image that is very close to the ground truth. In many real-world vehicle scenarios, the primary and interfering radars have relative motion, producing dynamic interference. Compared with stationary interference, the interference energy from dynamic interference is distributed in different areas on the focused image; see
Figure 8a. As the interference energy is distributed in different regions of the image, the interference intensity is relatively lower, and the different interference suppression algorithms consequently have better performance for dynamic interference suppression, as shown in
Figure 8. Similarly, the proposed interference envelope detection approach greatly improves the performance of the MCA method; see
Figure 8f. Again, as illustrated in
Figure 8h, the proposed approach produces the most focused radar image.
Comparisons of object evaluation were conducted as well. The results are reported in
Table 2. The larger PTINRs along with the absence of ghost targets indicate the better suppression performance of the associated method. The proposed method has the best performance index in the simulated experiments. Because the static target appears on the zero velocity line axis of the focused image, and is therefore covered by strong interference energy, its PTINR value is −6.1 dB. The wavelet-based method and MCA-based method have limited improvement on this index, while the proposed method can realize an improvement of up to 19.1 dB, a total improvement of 25.2 dB, which is beneficial for subsequent target detection and tracking.
4.2. Real Radar Field Experiments
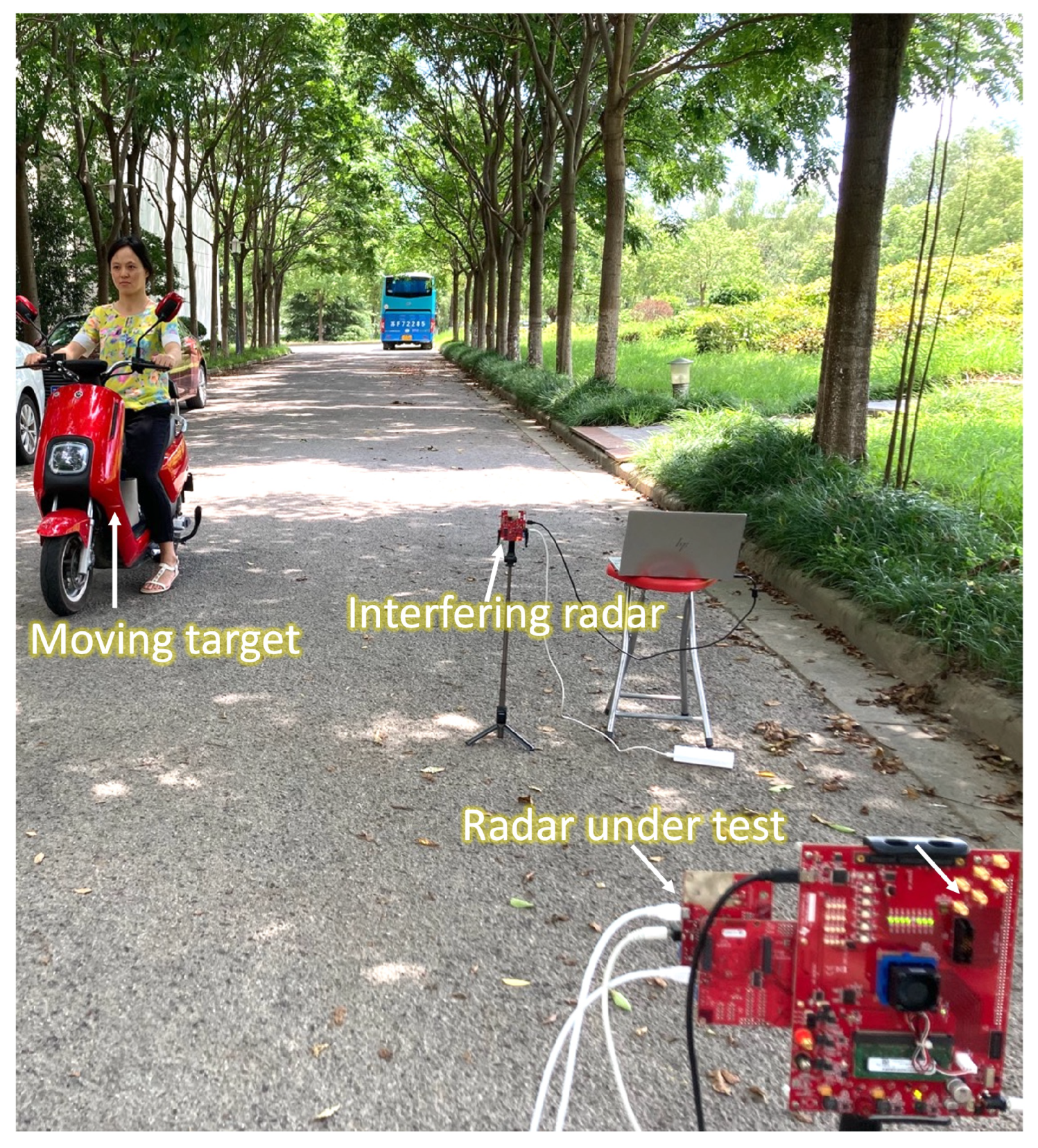
As shown in
Figure 9, real radar interference experiments were conducted using two Texas Instruments AWR1642 mm wave radars and an electric bicycle traveling at approximately 5 m/s forward or backward relative to the radar under test. The distance of the interfering radar was 4 m. The experiment parameters are presented in
Table 3.
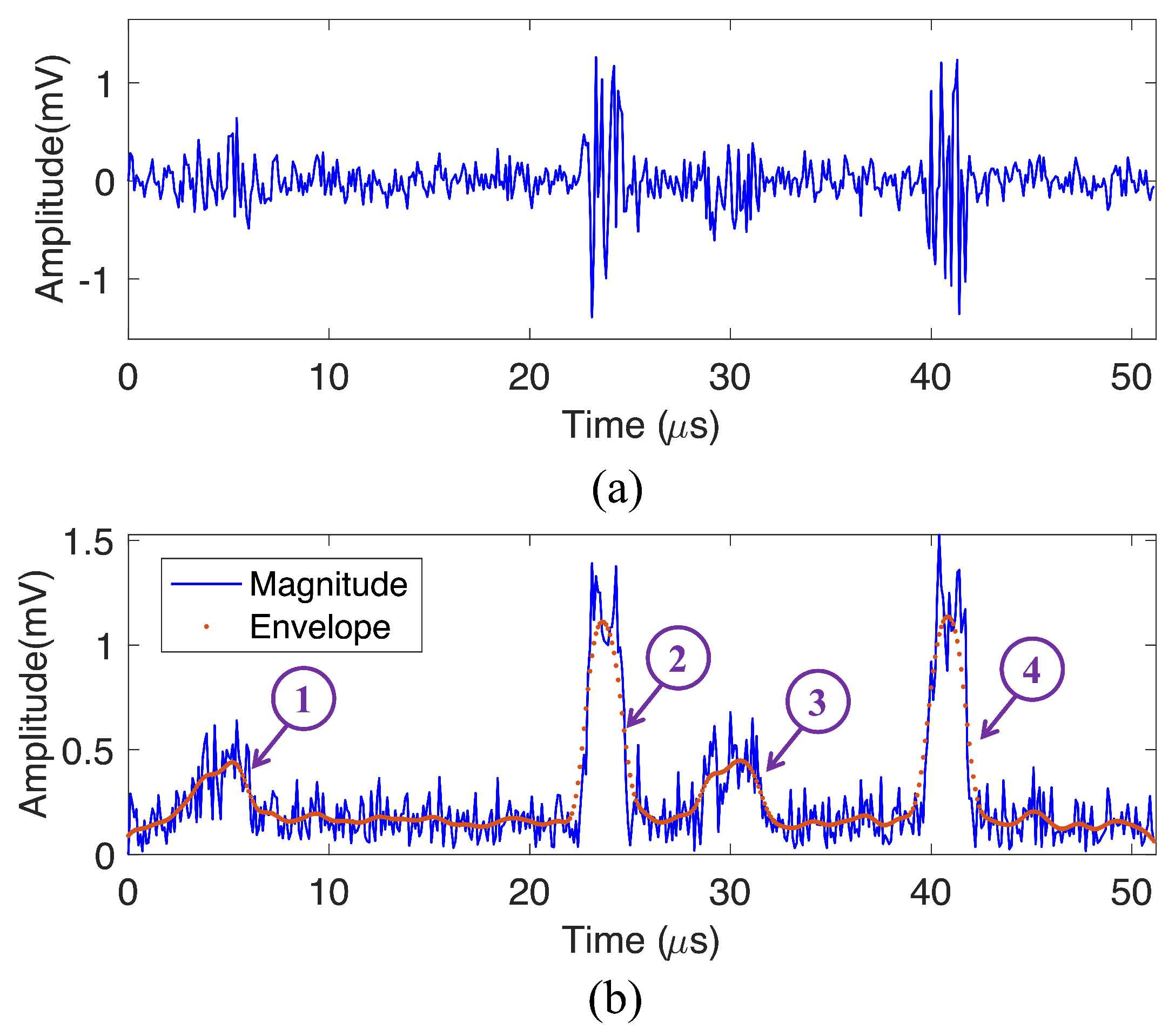
Figure 10 demonstrates the collected radar data with strong interference. The signal of the sine wave in the plot is the radar target signal, and the signal that changes suddenly and quickly with high intensity is the interfering signal. This coincides with the theoretical derivation in
Section 2.
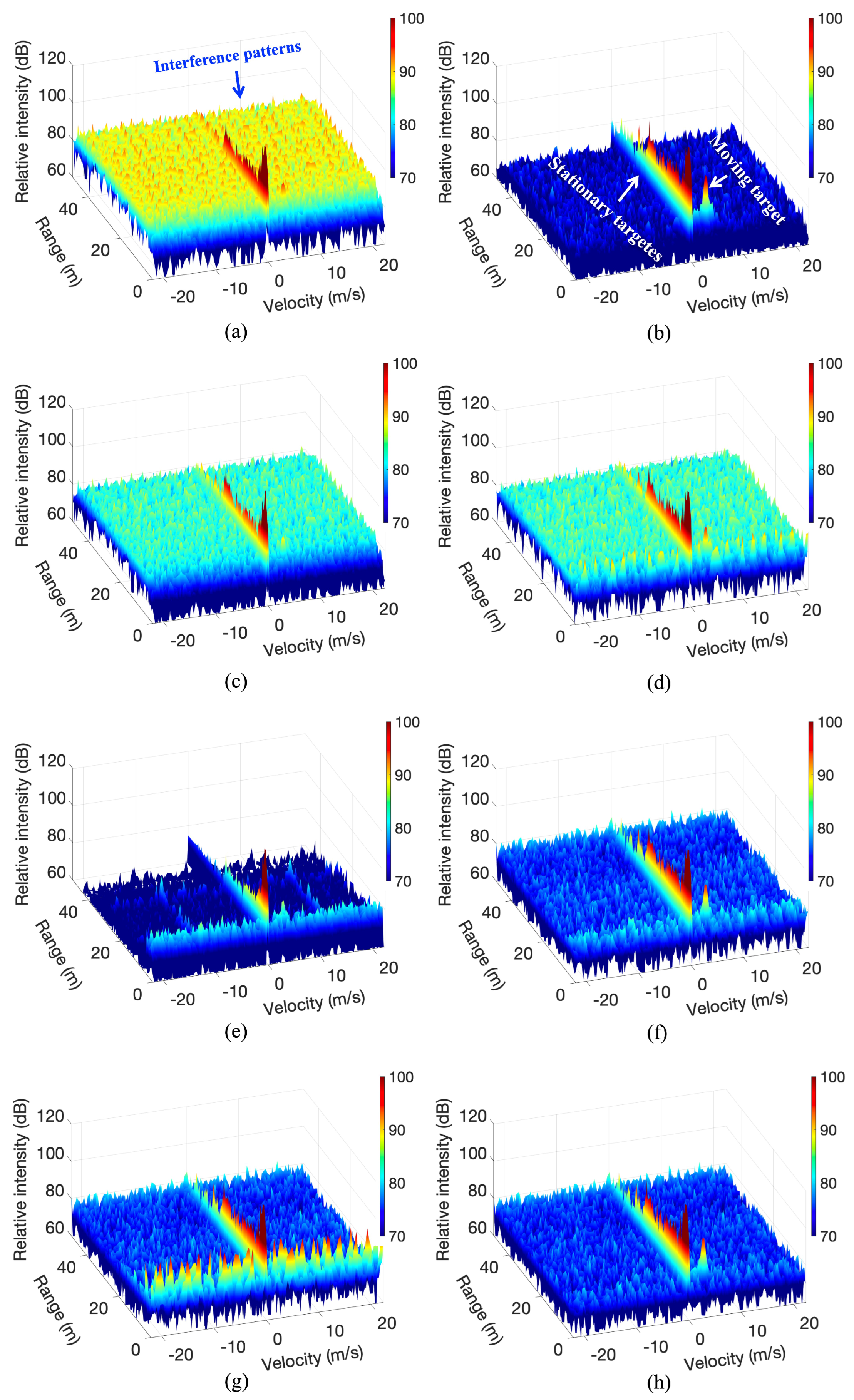
Figure 11 presents the comparison results of the real radar interference experiments. The stationary targets are distributed on the axis of zero velocity of the focused image, however the moving target is not visible due to strong interference. Compared to the other approaches, the proposed method has the best performance. As shown in
Figure 11a, the strong interference energy is distributed over the focused radar image. The main reason for this is that the interfering signal does not repeat at the same location in each received signal with dynamic interference. Compared to the simulated results, the zeroing method produces stronger sidelobes on the focused image, which leads to difficulty in distinguishing between real moving targets; see
Figure 11g. The evaluation results reported in
Table 4 indicate that the proposed method has the best performance index in the real radar experiments.
6. Conclusions
In this paper, an effective and feasible interference suppression technique is proposed for the currently important and challenging issue of incoherent interference between automotive FMCW radars. A detailed derivation of the processing of incoherent interference signals is presented. A precise interference envelope detection method is proposed based on a well-designed low-pass filter. This method can avoid interference suppression in cases where the signal is received without interference, thereby reducing the required amount of computation. This work considered the interference problem as a missing radar data problem; the radar target signal is superimposed in complex sinusoidal waves with good sparse characteristics in the DFT domain. Thus, the radar target signal polluted by the incoherent interference can be successfully recovered based on the L1 norm least squares method. Using the proposed method, the radar target can be perfectly focused even in cases of strong interference. Moreover, two current state-of-the-art methods, namely, the wavelet-based and MCA-based methods, are improved when using the proposed interference envelope detection method. Extensive experiments demonstrate the promising performance of the proposed techniques.
This work shows the effectiveness of suppressing interference in the range and Doppler domains. However, this work does have limitations; in particular, it does not investigate interference in spatial multi-channel data. Our future work will focus on interference reduction for spatial multi-channel radar data.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}