
Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites

 ,
,  ,
,  ,
,  ,
,  , and
, and
Abstract
1. Introduction
- (1)
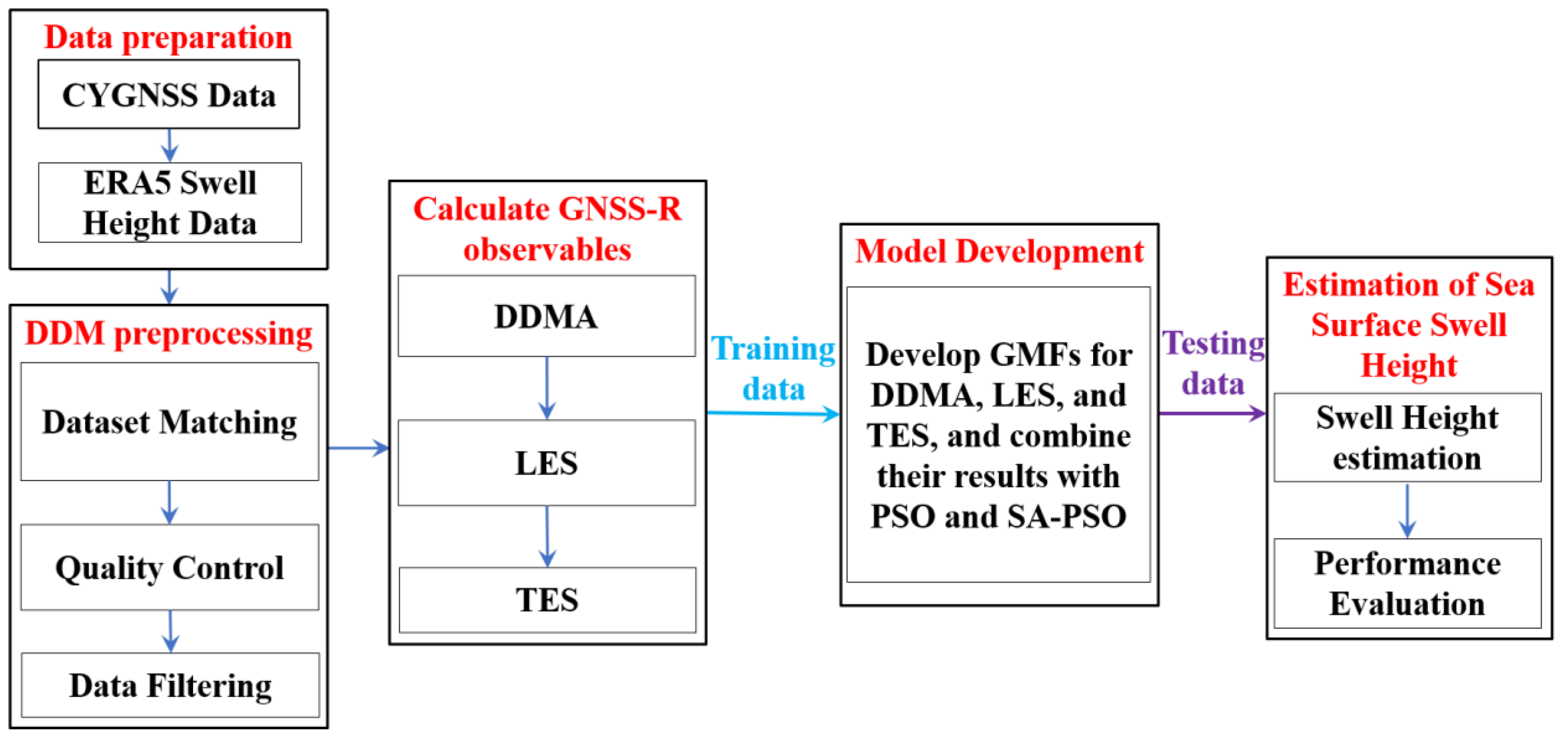
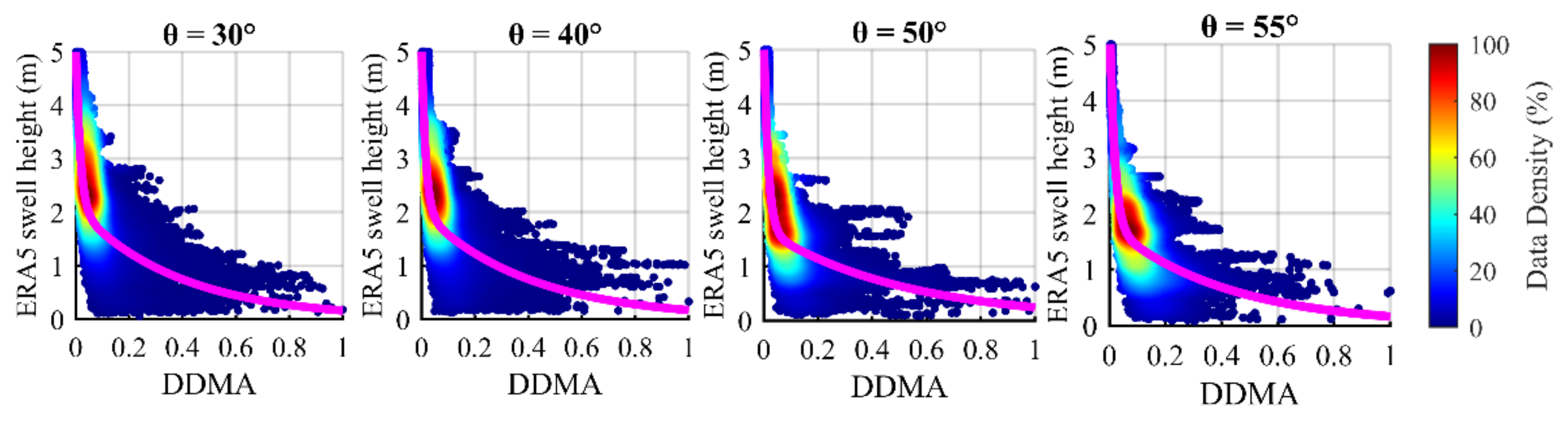
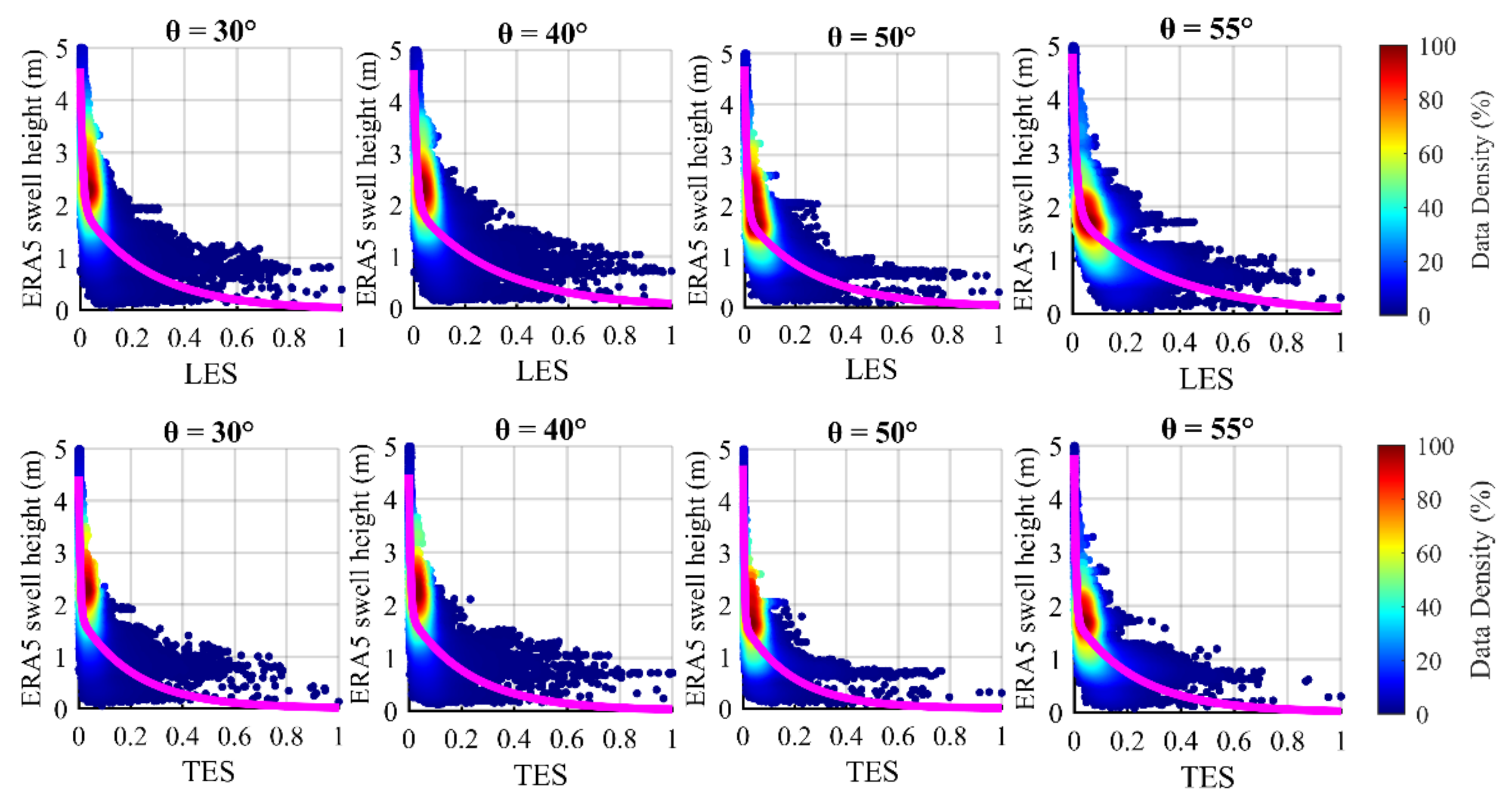
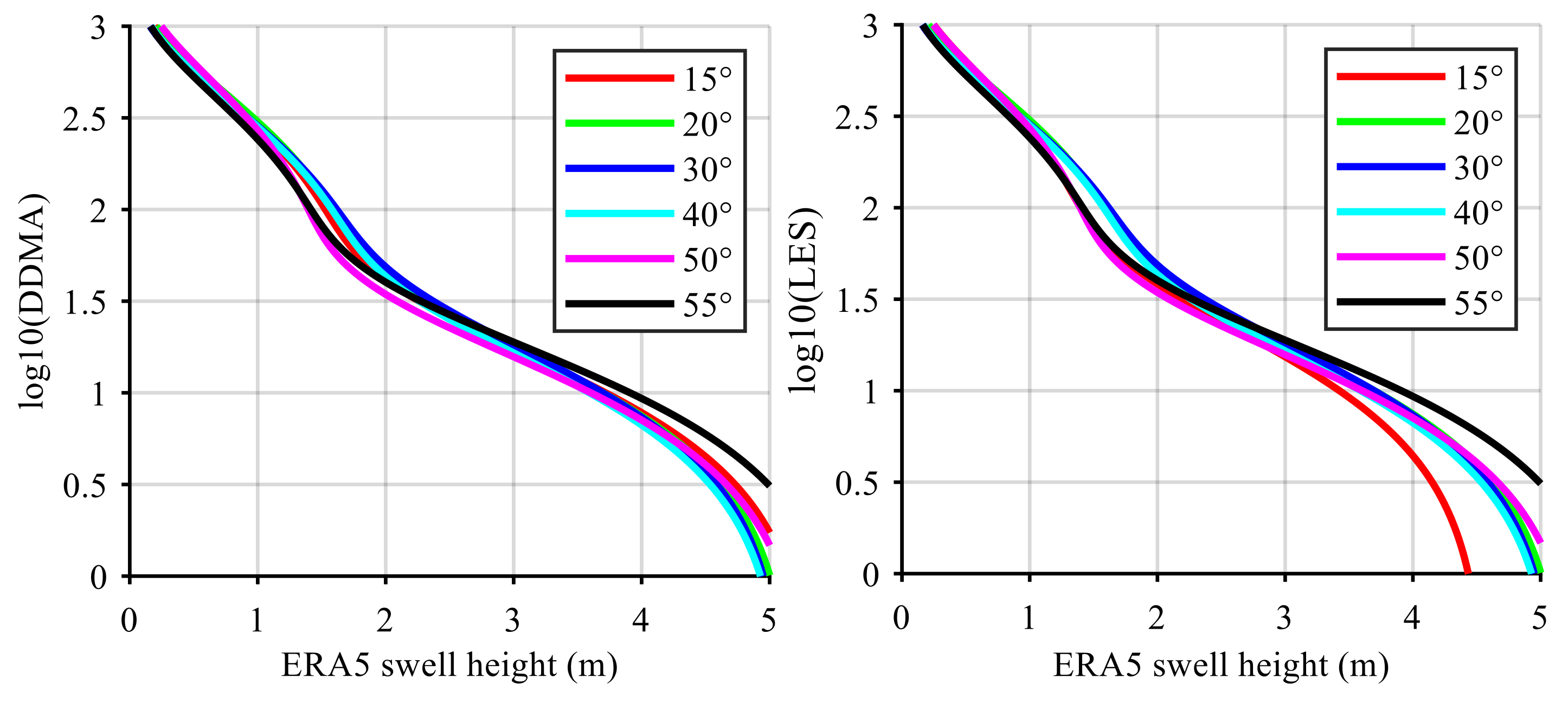
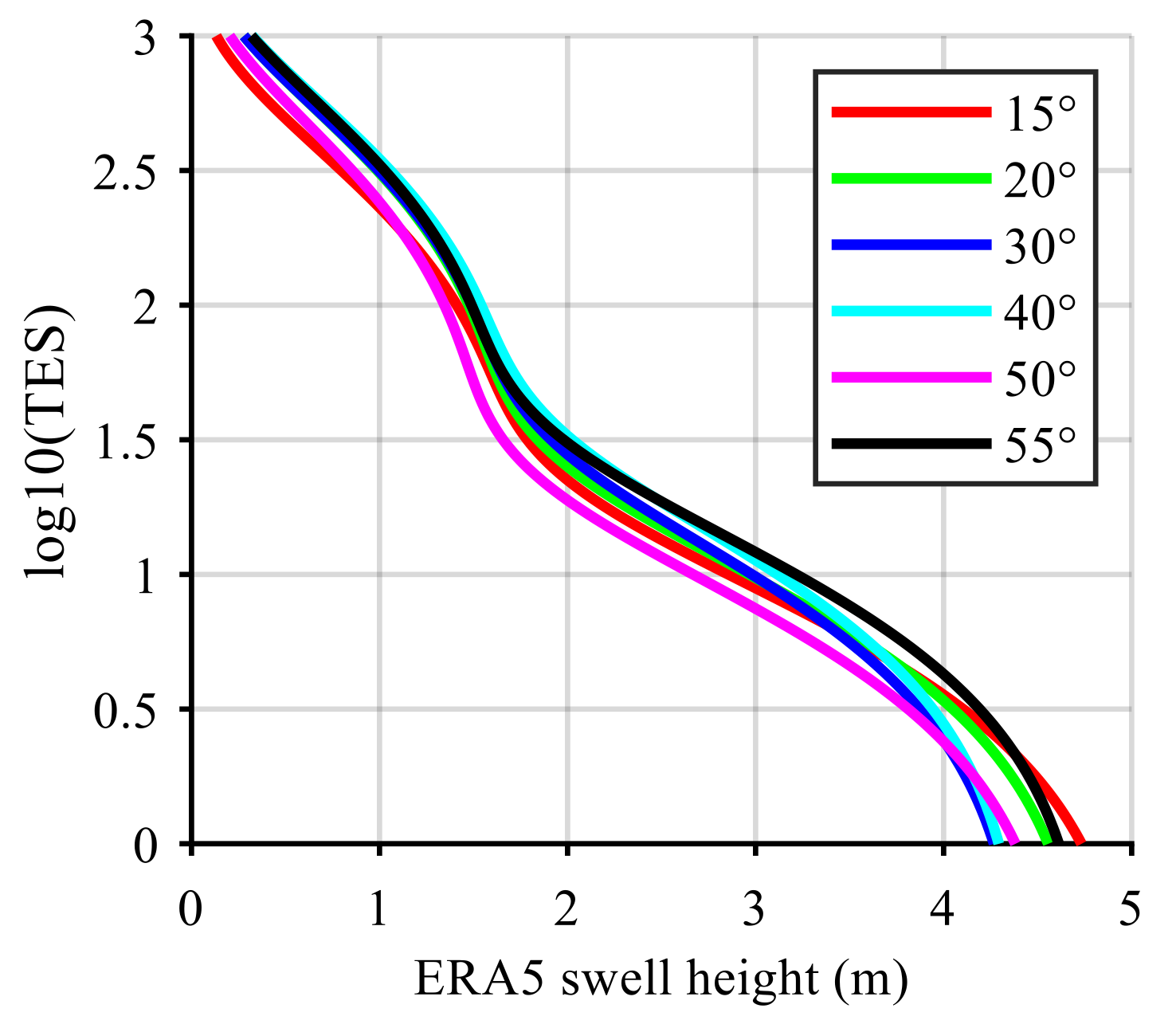
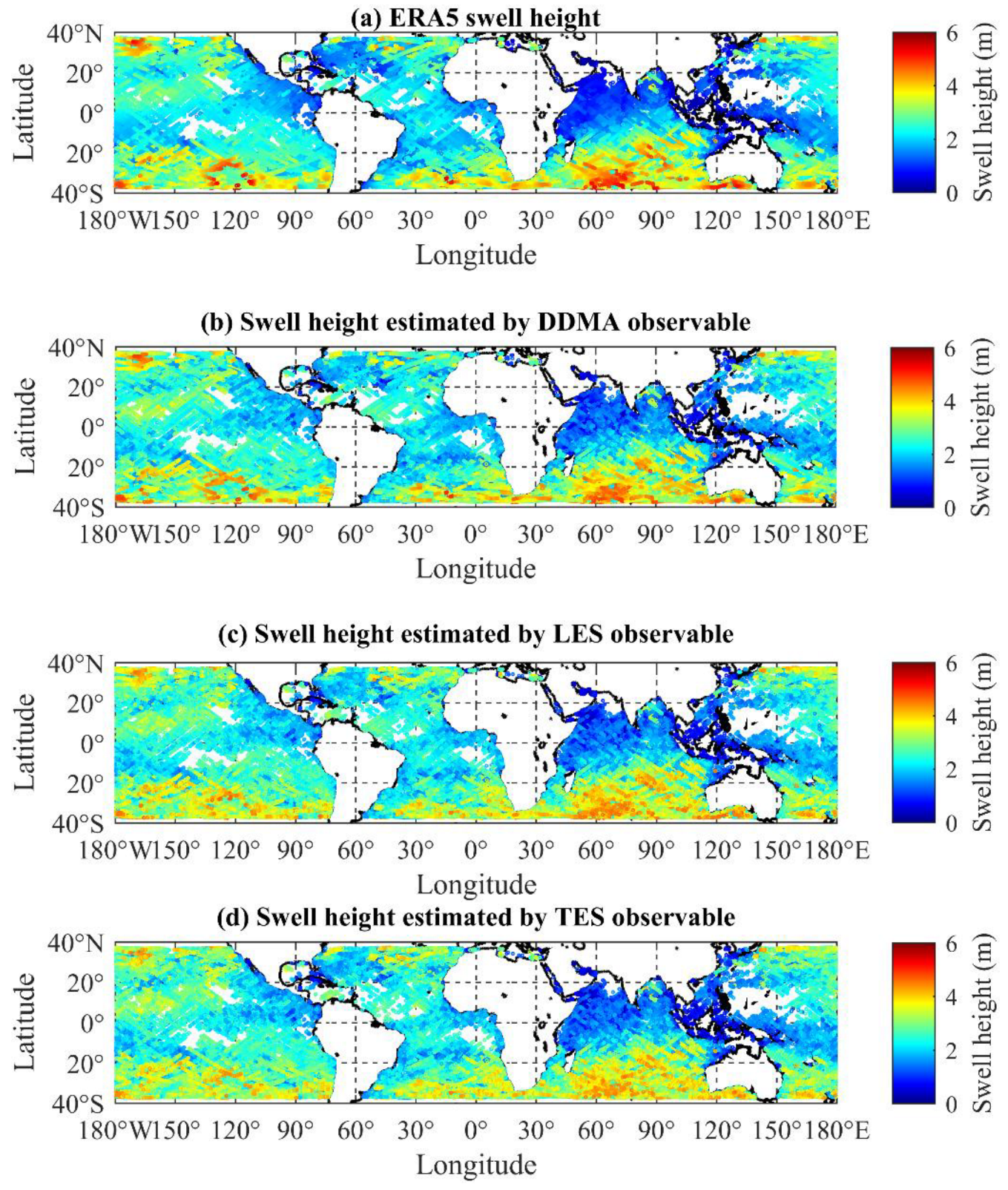
- Three GNSS-R observables extracted from DDM were introduced and used for swell height estimation, i.e., delay-Doppler map average (DDMA), the leading edge slope (LES) of the integrated delay waveform (IDW), and the trailing edge slope (TES) of the IDW.
- (2)
- Based on these three GNSS-R observables, empirical models were developed for retrieving swell height.
- (3)
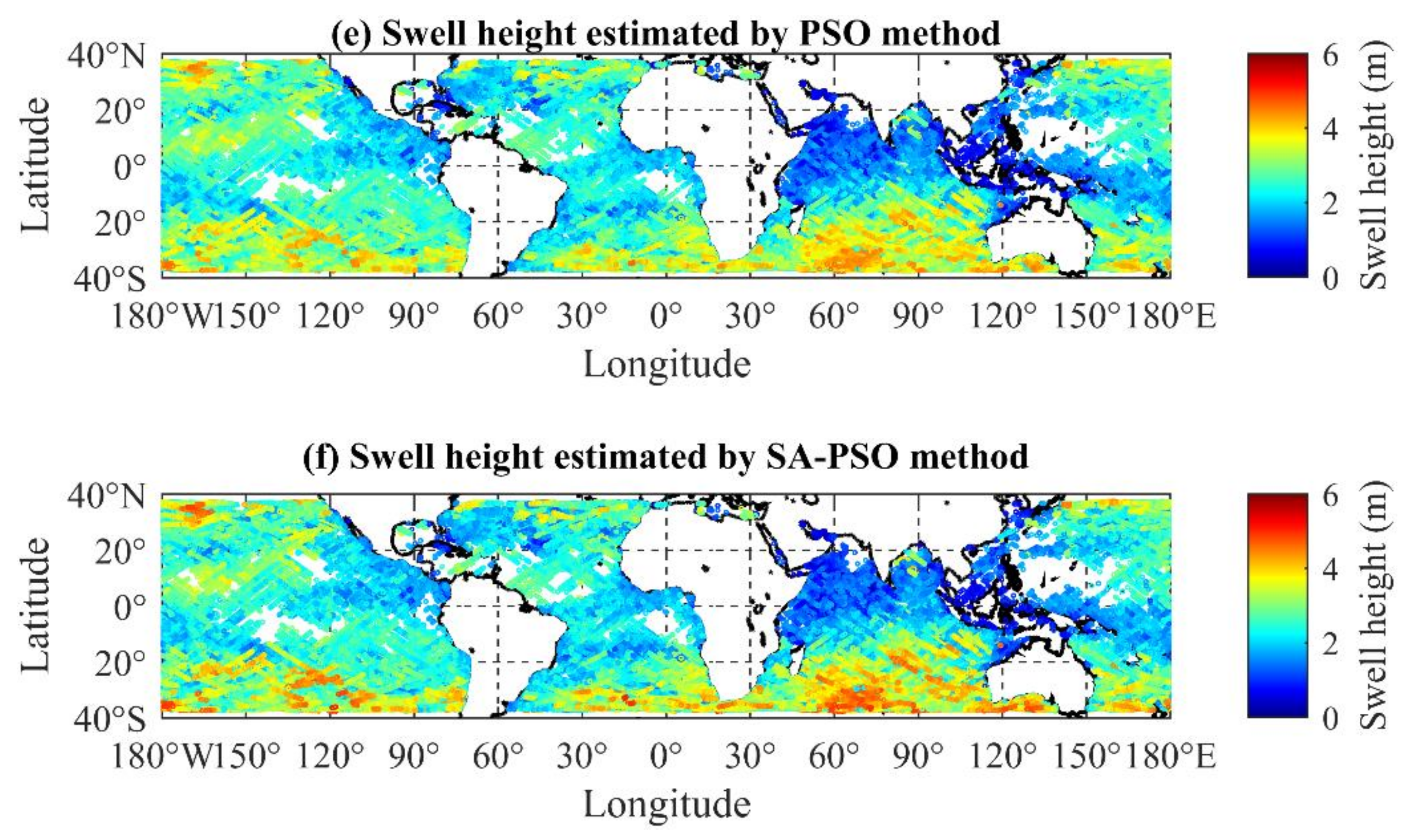
- Particle swarm optimization (PSO) was exploited to establish a combined model to enhance the swell height estimation performance.
- (4)
- The problem of local optimal solutions often occurs in the PSO algorithm. To overcome the problem and further increase the measurement accuracy, we proposed a SA-PSO algorithm that combines simulated annealing and PSO.
2. Dataset Description and Data Processing
2.1. Data
2.2. Data Quality Control
- (a)
- The observables must be positive, while the Nan values need to be discarded.
- (b)
- When the star tracker is unable to track due to solar contamination, the measurements taken are discarded.
- (c)
- The uncertainty of the bistatic radar cross section (BRCS) is below 1.
- (d)
- The nano star tracker attitude status is set to 0; it shows that the nano star tracker attitude status is “OK”.
- (e)
- When the absolute value of spacecraft roll is greater than 30 degrees, the yaw is greater than 5 degrees, and the pitch is greater than 10 degrees, the measurement values are discarded.
- (f)
- The observables from GPS IIF satellites are removed, because accurate information on the transmitter antenna gain pattern of GPS satellites was not available.
- (g)
- The DDM data with the range corrected gain (RCG) figure of merit (FOM) for the DDM (prn_fig_of_merit) less than 0 are discarded.
- (h)
- The observation data with the receive antenna gain (sp_rx_gain) in the direction of the specular reflection point less than 0 dBi are discarded.
- (i)
- In order to reduce land effects and modeling error, observations with specular reflection points greater than 25 km from land were selected.
- (j)
- Observable data range is defined as 38°N–38°S in the latitude.
- (k)
- For more descriptions, see the CYGNSS L1 V3.0 users’ guide and data dictionary, which can be found on the Web site (https://podaac-tools.jpl.nasa.gov/drive/files/allData/cygnss/L1/docs/148-0346-8_L1_v3.0_netCDF_Data_Dictionary.xlsx (accessed on 1 January 2022)).
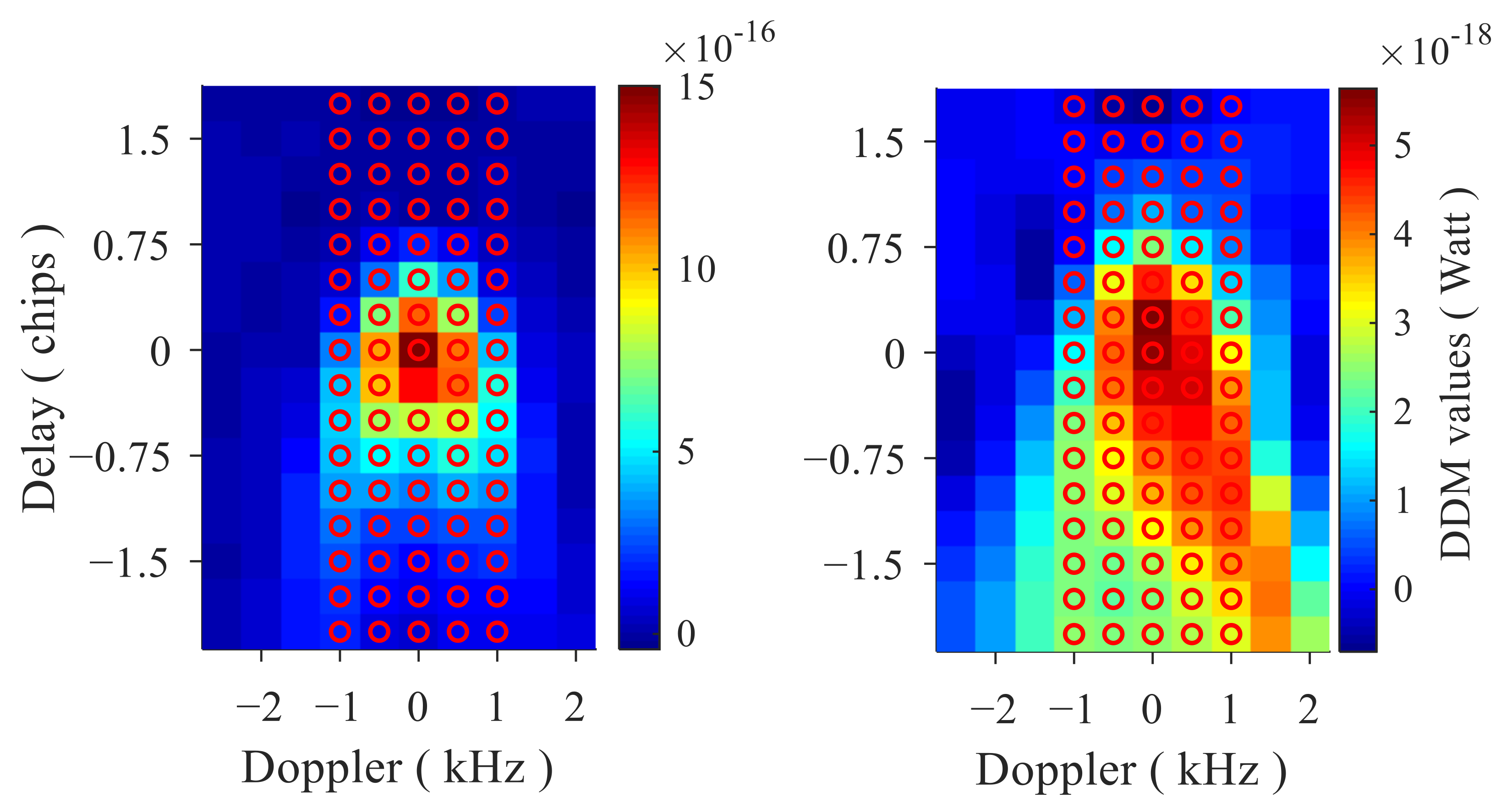
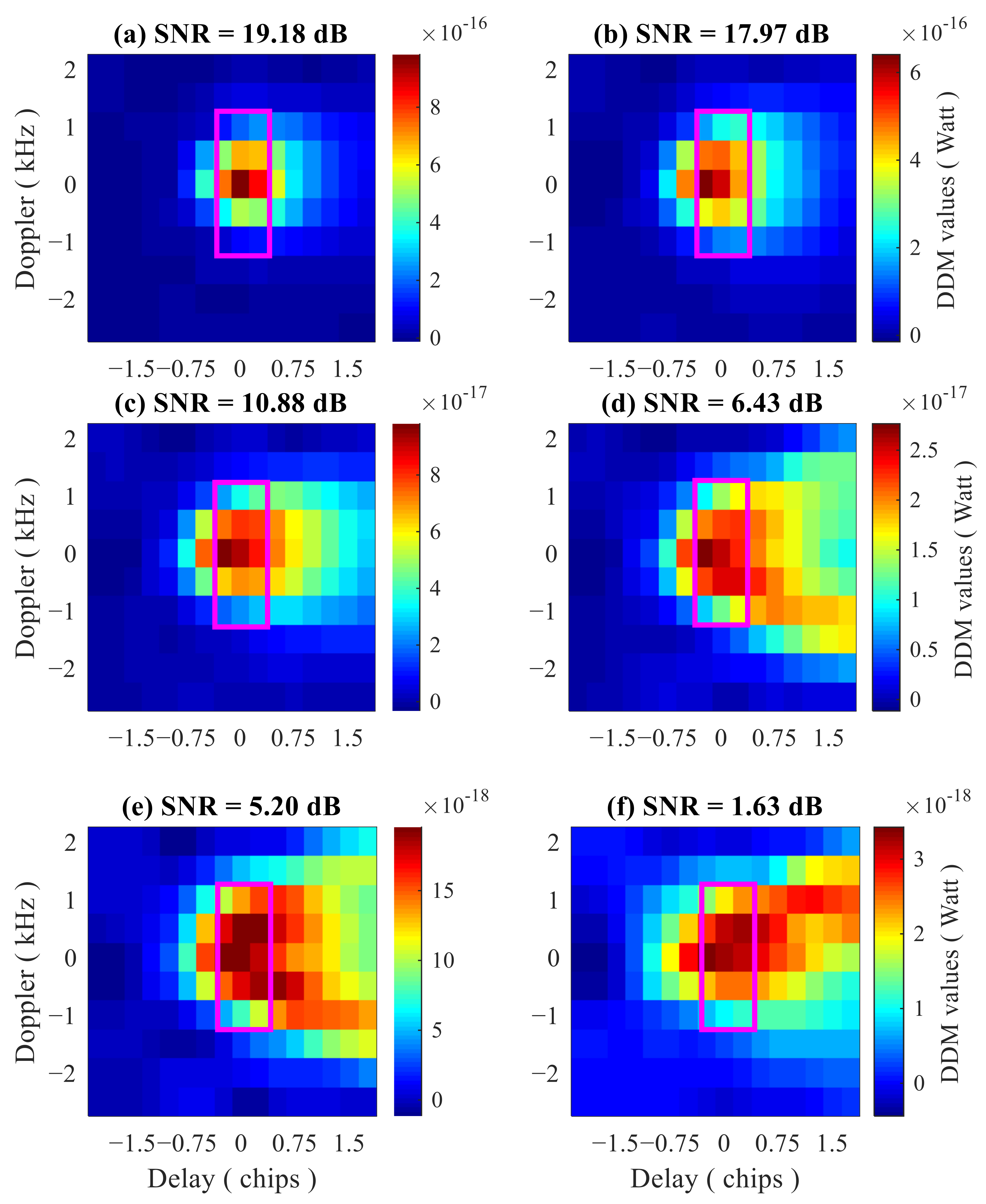
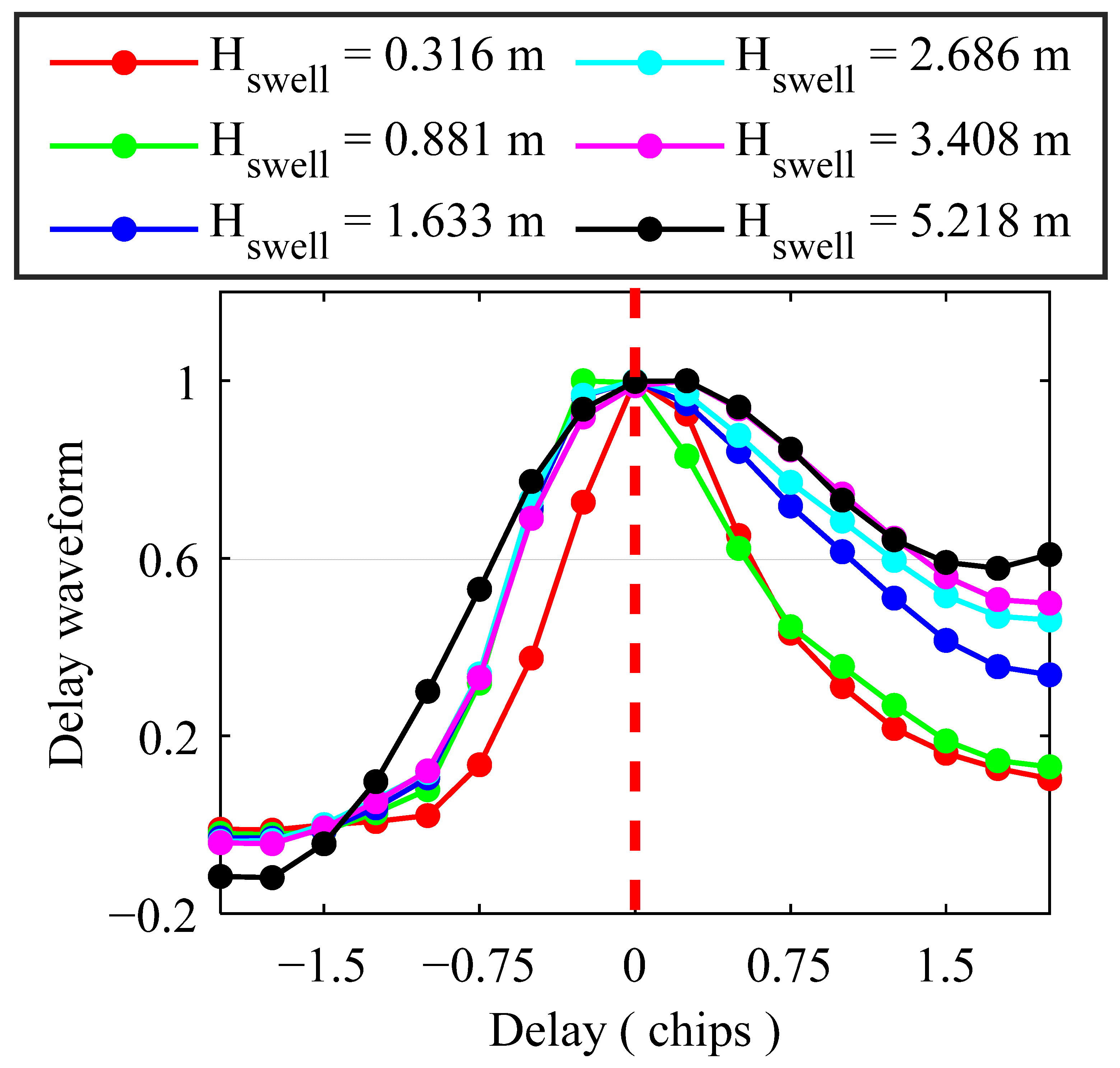
2.3. Spaceborne GNSS-R DDM and Integral Delay Waveforms
2.4. Definition of GNSS-R Observables
3. Model Construction
3.1. Basic Description
3.2. Modeling Based on Individual Observables
3.3. Modeling Based on PSO Method
3.4. Modeling Based on Combination of Simulated Annealing and Particle Swarm Optimization (SA-PSO) Algorithm
4. Model Performance Evaluation
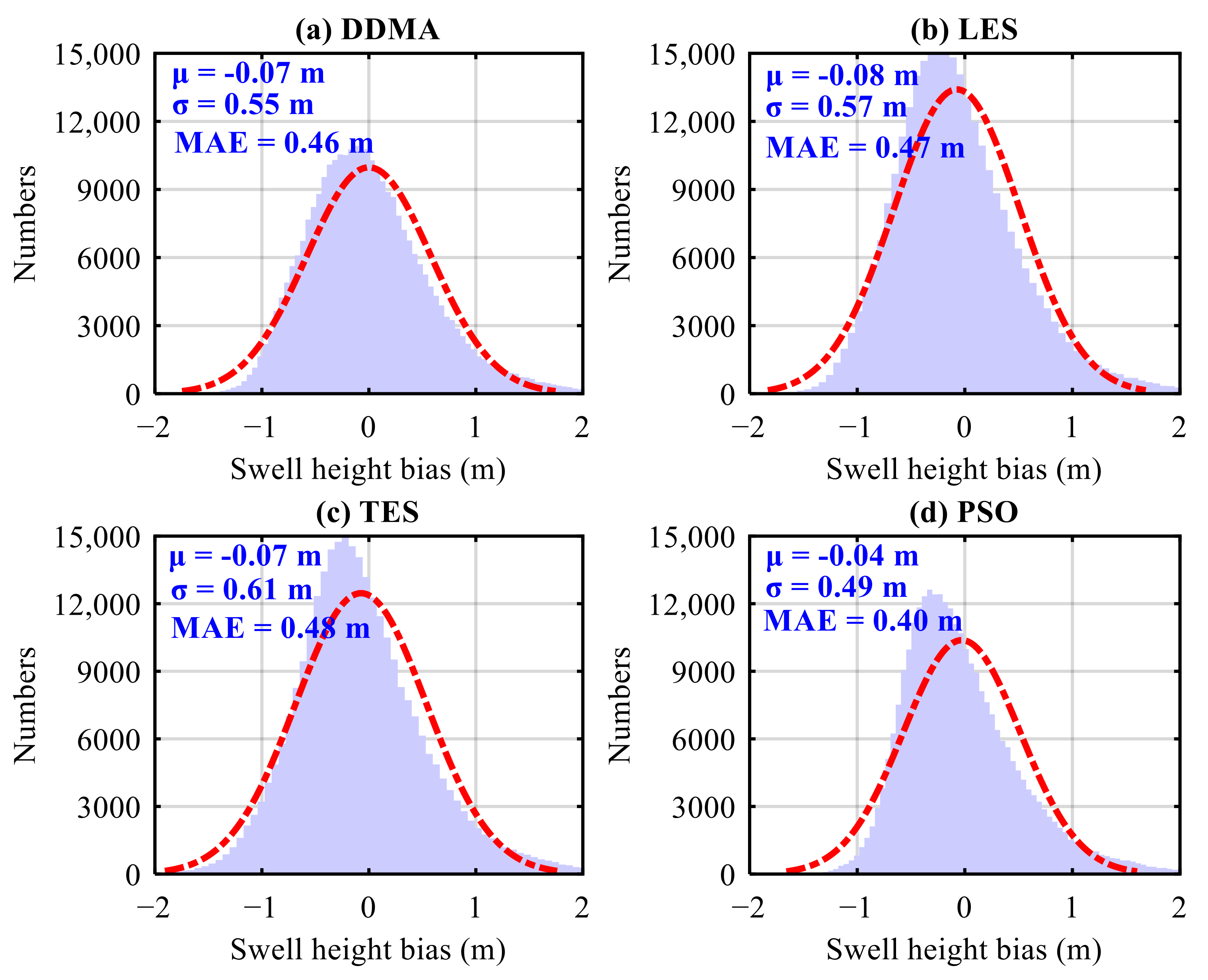
4.1. Performance Evaluation Index
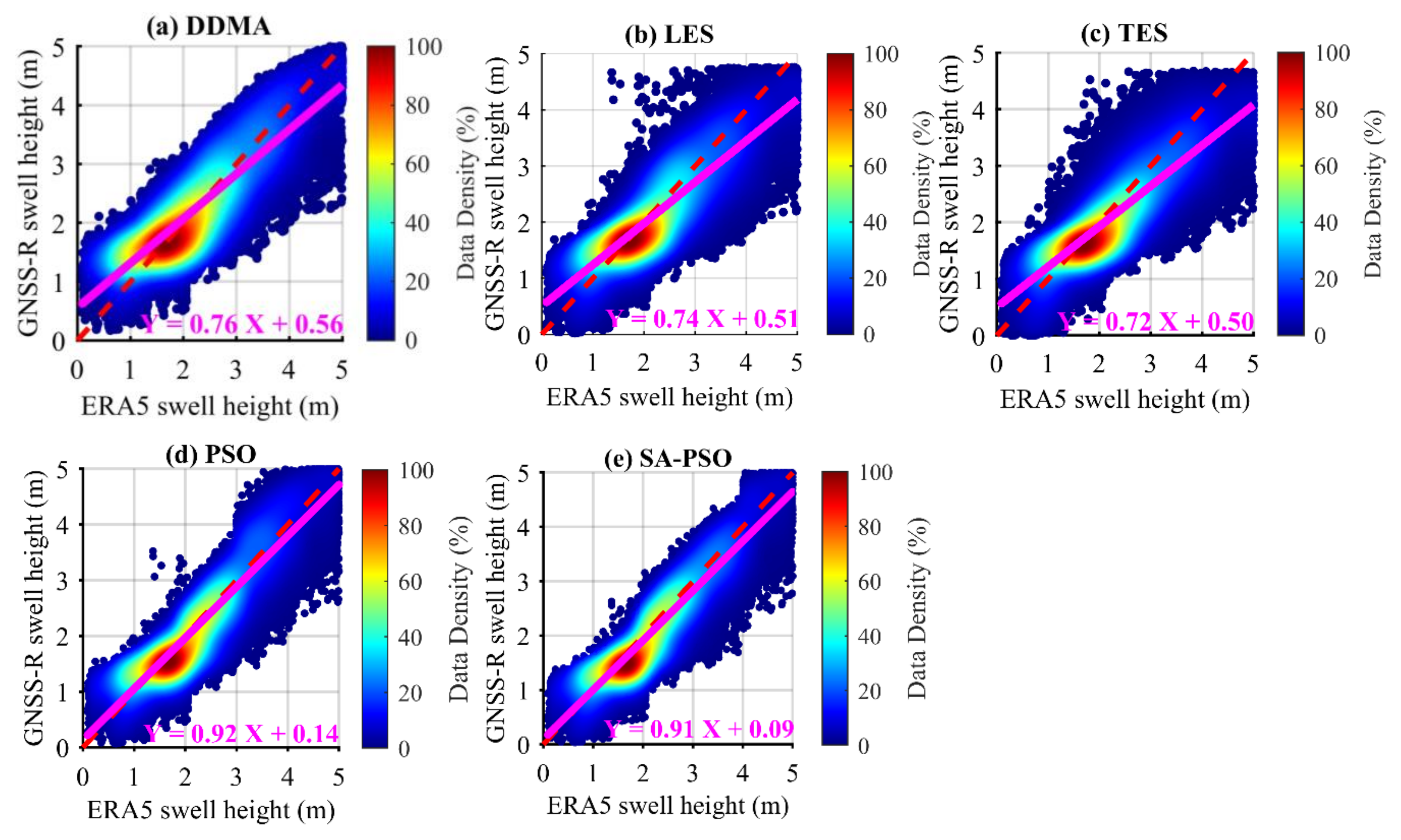
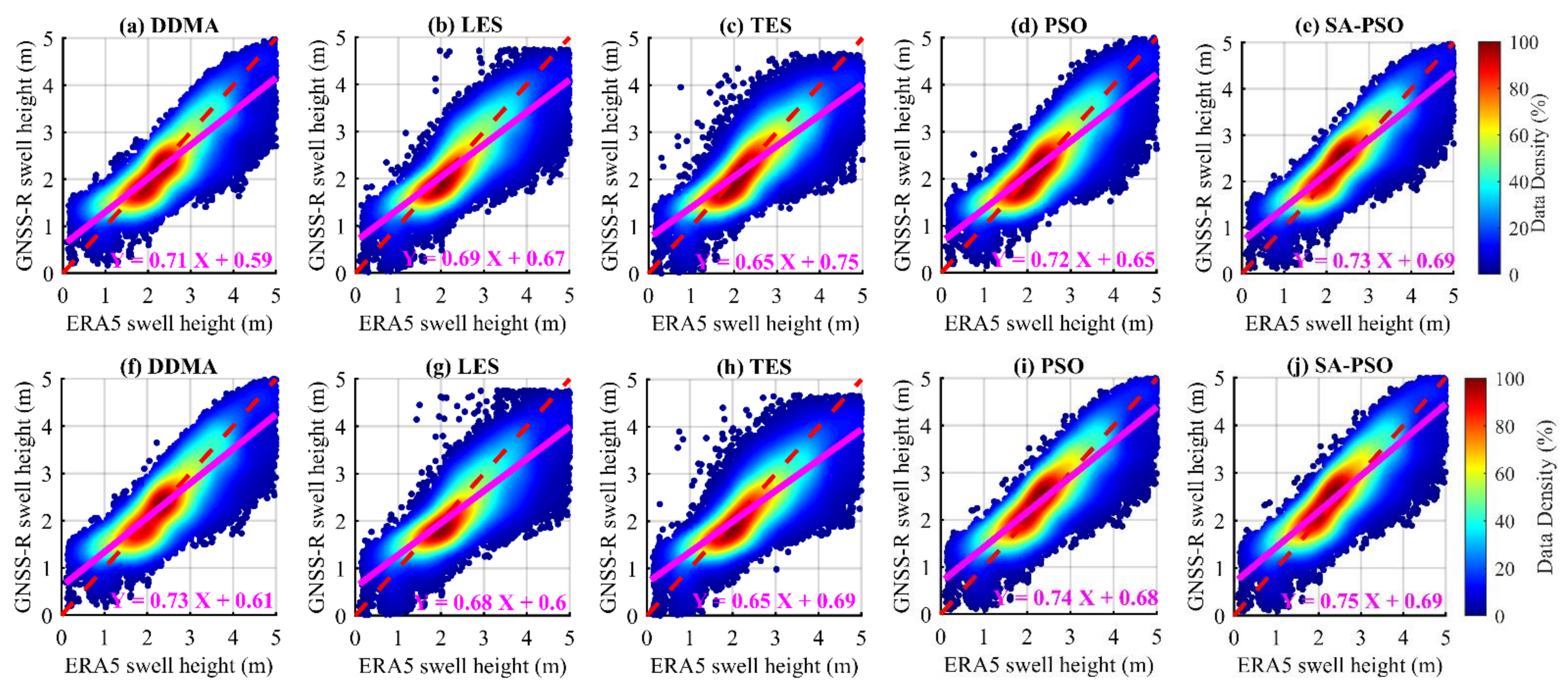
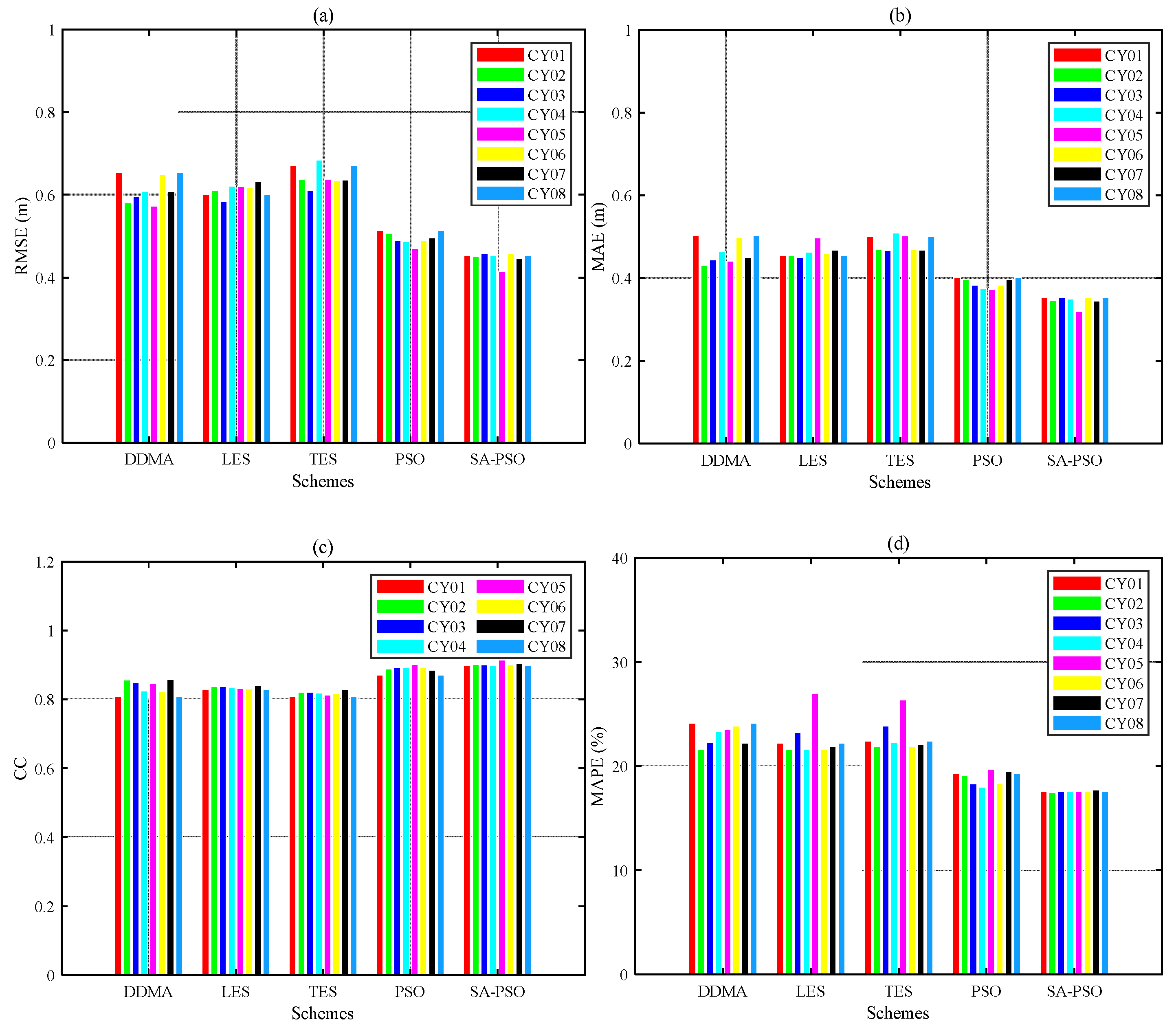
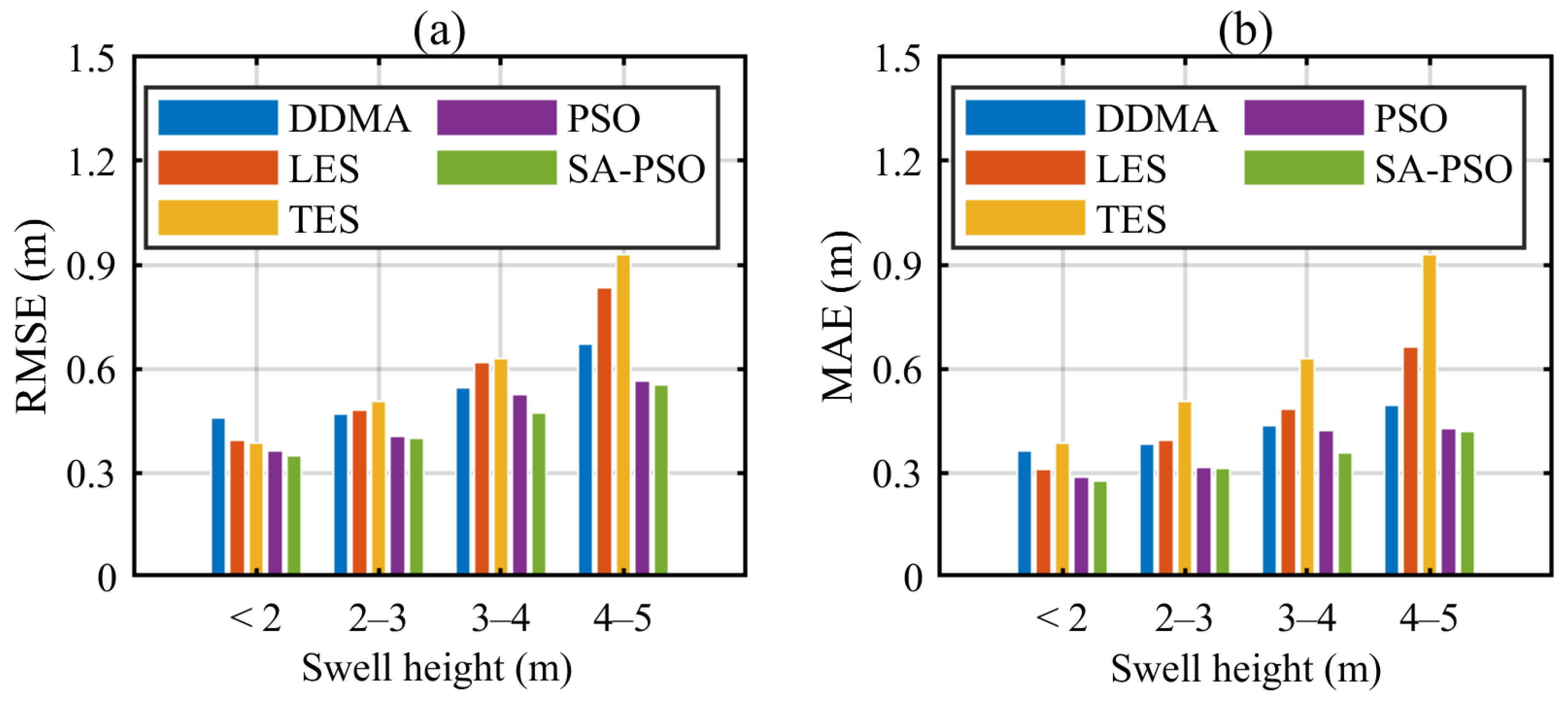
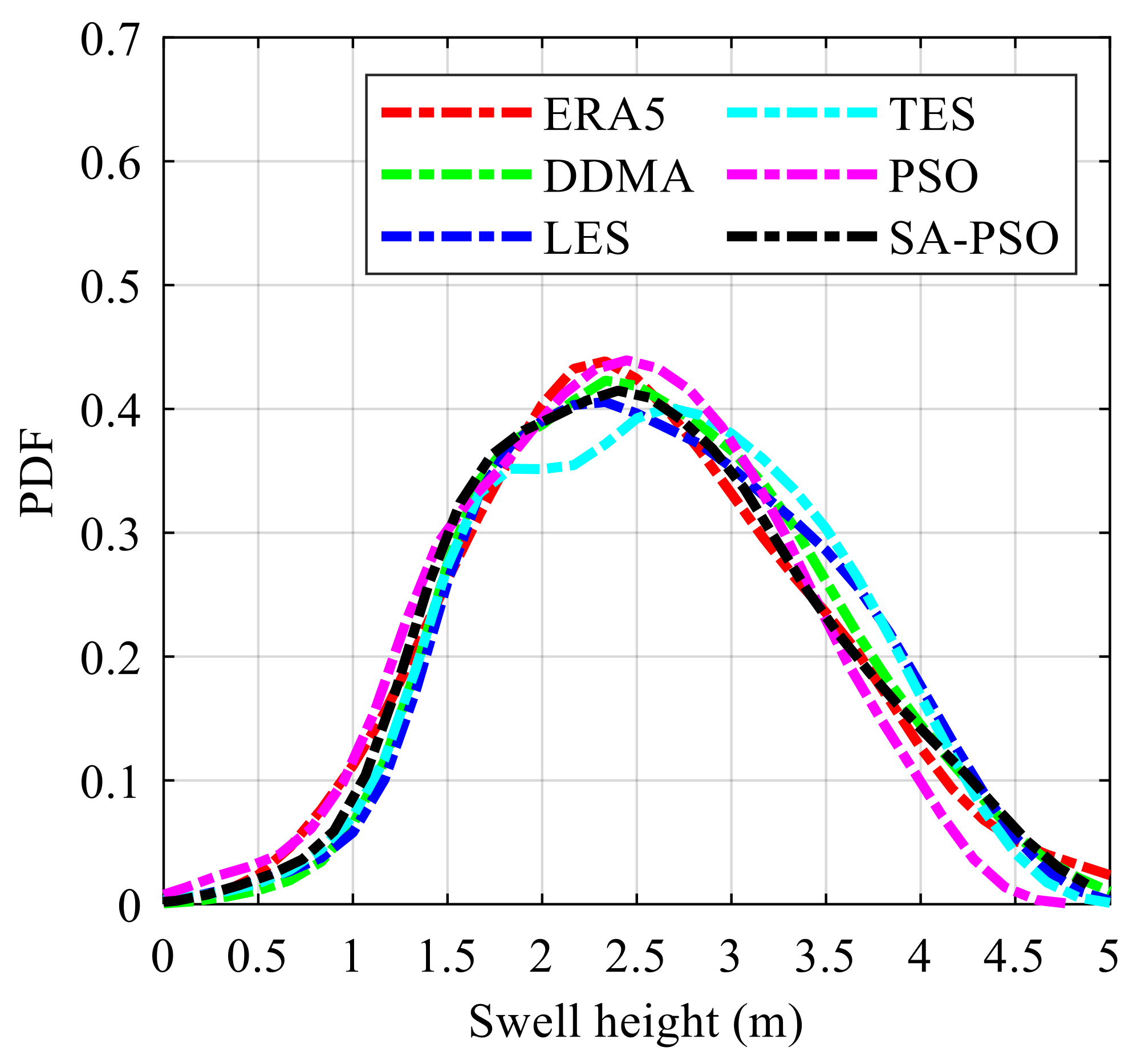
4.2. Results for PSO, SA-PSO, and Other Three Estimates
4.3. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, W.; Forget, P.; Guan, C. Inversion and assessment of swell waveheights from HF radar spectra in the Iroise Sea. Ocean Dyn. 2016, 66, 527–538. [Google Scholar] [CrossRef]
- Albuquerque, J.; Antolínez, J.A.; Rueda, A.; Méndez, F.J.; Coco, G. Directional correction of modeled sea and swell wave heights using satellite altimeter data. Ocean Model. 2018, 131, 103–114. [Google Scholar] [CrossRef]
- Mognard, N.M. Swell in the Pacific Ocean observed by SEASAT radar altimeter. Mar. Geodesy 1984, 8, 183–210. [Google Scholar] [CrossRef]
- Mognard, N.M.; Campbell, W.J.; Brossier, C. World Ocean mean monthly waves, swell, and surface winds for July through October 1978 from SEASAT radar altimeter data. Mar. Geodesy 1984, 8, 159–181. [Google Scholar] [CrossRef]
- Li, X.M. A new insight from space into swell propagation and crossing in the global oceans. Geophys. Res. Lett. 2016, 43, 5202–5209. [Google Scholar] [CrossRef]
- Altiparmaki, O.; Kleinherenbrink, M.; Naeije, M.; Slobbe, C.; Visser, P. SAR Altimetry Data as a New Source for Swell Monitoring. Geophys. Res. Lett. 2022, 49, e2021GL096224. [Google Scholar] [CrossRef]
- Wang, H.; Mouche, A.; Husson, R.; Chapron, B. Indian Ocean Crossing Swells: New Insights from “Fireworks” Perspective Using Envisat Advanced Synthetic Aperture Radar. Remote Sens. 2021, 13, 670. [Google Scholar] [CrossRef]
- Wang, H.; Mouche, A.; Husson, R.; Grouazel, A.; Chapron, B.; Yang, J. Assessment of Ocean Swell Height Observations from Sentinel-1A/B Wave Mode against Buoy in Situ and Modeling Hindcasts. Remote Sens. 2022, 14, 862. [Google Scholar] [CrossRef]
- Wang, H.; Mouche, A.; Husson, R.; Chapron, B. Dynamic validation of ocean swell derived from Sentinel-1 wave mode against buoys. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3223–3226. [Google Scholar]
- Ardhuin, F.; Rogers, E.; Babanin, A.V.; Filipot, J.-F.; Magne, R.; Roland, A.; Van Der Westhuysen, A.; Queffeulou, P.; Lefevre, J.-M.; Aouf, L.; et al. Semiempirical Dissipation Source Functions for Ocean Waves. Part I: Definition, Calibration, and Validation. J. Phys. Oceanogr. 2010, 40, 1917–1941. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D. Methods for the extraction of long-period ocean wave parameters from narrow beam HF radar sea echo. Radio Sci. 1980, 15, 843–853. [Google Scholar] [CrossRef]
- Lipa, B.J.; Barrick, D.E.; Maresca, J.W., Jr. HF radar measurements of long ocean waves. J. Geophys. Res. Oceans 1981, 86, 4089–4102. [Google Scholar] [CrossRef]
- Bathgate, J.S.; Heron, M.L.; Prytz, A. A Method of Swell-Wave Parameter Extraction from HF Ocean Surface Radar Spectra. IEEE J. Ocean. Eng. 2006, 31, 812–818. [Google Scholar] [CrossRef]
- Shen, C.; Gill, E.; Huang, W. Extraction of swell parameters from simulated noisy HF radar signals. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Alattabi, Z.R.; Cahl, D.; Voulgaris, G. Swell and Wind Wave Inversion Using a Single Very High Frequency (VHF) Radar. J. Atmos. Ocean. Technol. 2019, 36, 987–1013. [Google Scholar] [CrossRef]
- Al-Attabi, Z.R.; Voulgaris, G.; Conley, D.C. Evaluation and Validation of HF Radar Swell and Wind wave Inversion Method. J. Atmos. Ocean. Technol. 2021, 38, 1747–1775. [Google Scholar] [CrossRef]
- Liu, X.; Huang, W.; Gill, E.W. Estimation of Significant Wave Height From X-Band Marine Radar Images Based on Ensemble Empirical Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1740–1744. [Google Scholar] [CrossRef]
- Liu, X.; Huang, W.; Gill, E.W. Wave Height Estimation from Shipborne X-Band Nautical Radar Images. J. Sens. 2016, 2016, 1078053. [Google Scholar] [CrossRef]
- Wu, L.-C.; Doong, D.-J.; Lai, J.-W. Influences of Nononshore Winds on Significant Wave Height Estimations Using Coastal X-Band Radar Images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4202111. [Google Scholar] [CrossRef]
- Huang, W.; Liu, X.; Gill, E.W. Ocean Wind and Wave Measurements Using X-Band Marine Radar: A Comprehensive Review. Remote Sens. 2017, 9, 1261. [Google Scholar] [CrossRef]
- Hammond, M.L.; Foti, G.; Gommenginger, C.; Srokosz, M. Temporal variability of GNSS-Reflectometry Ocean wind speed retrieval performance during the UK TechDemoSat-1 mission. Remote Sens. Environ. 2020, 242, 111744. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S. Bayesian Wind Speed Estimation Conditioned on Significant Wave Height for GNSS-R Ocean Observations. J. Atmos. Ocean. Technol. 2017, 34, 1193–1202. [Google Scholar] [CrossRef]
- Li, W.; Rius, A.; Fabra, F.; Cardellach, E.; Ribo, S.; Martin-Neira, M. Revisiting the GNSS-R Waveform Statistics and Its Impact on Altimetric Retrievals. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2854–2871. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R Sea Ice Detection Using Delay-Doppler Maps: First Results from the U.K. TechDemoSat-1 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Yu, K. Weak Tsunami Detection Using GNSS-R-Based Sea Surface Height Measurement. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1363–1375. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Zavorotny, V.U.; Wickert, J.; Reich, S. Can GNSS Reflectometry Detect Precipitation Over Oceans? Geophys. Res. Lett. 2018, 45, 12585–12592. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. Sea Surface Rainfall Detection and Intensity Retrieval Based on GNSS-Reflectometry Data From the CYGNSS Mission. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5802015. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Han, S.; Qian, N.; Lin, Y.; Wang, J. Retrieval of Sea Surface Rainfall Intensity Using Spaceborne GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5803116. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Ni, J.; Yan, Q.; Han, S.; Wang, J.; Wang, C. Machine learning-based methods for sea surface rainfall detection from CYGNSS delay-doppler maps. GPS Solut. 2022, 26, 132. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Jales, P.; Unwin, M.; Shaw, A.; Robertson, C.; Roselló, J. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission. Geophys. Res. Lett. 2015, 42, 5435–5441. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S. Wind Speed Retrieval Algorithm for the Cyclone Global Navigation Satellite System (CYGNSS) Mission. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4419–4432. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea Surface Wind Speed Retrieval from the First Chinese GNSS-R Mission: Technique and Preliminary Results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Fernandez, L.; Perez, A.; Ruiz-De-Azua, J.A.; Park, H.; Camps, A.; Domínguez, B.C.; Pastena, M. In-Orbit Validation of the FMPL-2 Instrument—The GNSS-R and L-Band Microwave Radiometer Payload of the FSSCat Mission. Remote Sens. 2021, 13, 121. [Google Scholar] [CrossRef]
- Yang, G.; Bai, W.; Wang, J.; Hu, X.; Zhang, P.; Sun, Y.; Xu, N.; Zhai, X.; Xiao, X.; Xia, J.; et al. FY3E GNOS II GNSS Reflectometry: Mission Review and First Results. Remote Sens. 2022, 14, 988. [Google Scholar] [CrossRef]
- Peng, Q.; Jin, S. Significant Wave Height Estimation from Space-Borne Cyclone-GNSS Reflectometry. Remote Sens. 2019, 11, 584. [Google Scholar] [CrossRef]
- Yang, S.; Jin, S.; Jia, Y.; Ye, M. Significant Wave Height Estimation from Joint CYGNSS DDMA and LES Observations. Sensors 2021, 21, 6123. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. Significant Wave Height Retrieval Method Based on Spaceborne GNSS Reflectometry. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1503705. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. A New Integrated Method of CYGNSS DDMA and LES Measurements for Significant Wave Height estimation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1505605. [Google Scholar] [CrossRef]
- Wang, F.; Yang, D.; Yang, L. Retrieval and Assessment of Significant Wave Height from CYGNSS Mission Using Neural Network. Remote Sens. 2022, 14, 3666. [Google Scholar] [CrossRef]
- Yu, K.; Han, S.; Bu, J.; An, Y.; Zhou, Z.; Wang, C.; Tabibi, S.; Cheong, J.W. Spaceborne GNSS Reflectometry. Remote Sens. 2022, 14, 1605. [Google Scholar] [CrossRef]
- Hwang, P.A.; Ocampo-Torres, F.; Nava, H.G. Wind Sea and Swell Separation of 1D Wave Spectrum by a Spectrum Integration Method. J. Atmos. Ocean. Technol. 2012, 29, 116–128. [Google Scholar] [CrossRef]
- Guo, W.; Du, H.; Cheong, J.W.; Southwell, B.J.; Dempster, A.G. GNSS-R Wind Speed Retrieval of Sea Surface Based on Particle Swarm Optimization Algorithm. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4202414. [Google Scholar] [CrossRef]
- Ruf, C.S.; Balasubramaniam, R. Development of the CYGNSS Geophysical Model Function for Wind Speed. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 66–77. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Arnold, C.; Weigel, T.; Ruf, C.; Wickert, J. GNSS reflectometry global ocean wind speed using deep learning: Development and assessment of CyGNSSnet. Remote Sens. Environ. 2022, 269, 112801. [Google Scholar] [CrossRef]
- Zavorotny, V.; Voronovich, A. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S.; Jales, P.; Gommenginger, C. Spaceborne GNSS-R Minimum Variance Wind Speed Estimator. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6829–6843. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Holt, B.; Jaruwatanadilok, S.; Podest, E.; Cavanaugh, K.C. An Arctic Sea ice multi-step classification based on GNSS-R data from the TDS-1 mission. Remote Sens. Environ. 2019, 230, 111202. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Zhu, Y.; Qian, N.; Chang, J. Developing and Testing Models for Sea Surface Wind Speed Estimation with GNSS-R Delay Doppler Maps and Delay Waveforms. Remote Sens. 2020, 12, 3760. [Google Scholar] [CrossRef]
- Semedo, A.; Suselj, K.; Rutgersson, A.; Sterl, A. A Global View on the Wind Sea and Swell Climate and Variability from ERA-40. J. Clim. 2011, 24, 1461–1479. [Google Scholar] [CrossRef]
- Reinking, J.; Roggenbuck, O.; Even-Tzur, G. Estimating Wave Direction Using Terrestrial GNSS Reflectometry. Remote Sens. 2019, 11, 1027. [Google Scholar] [CrossRef]
- Wang, X.; He, X.; Shi, J.; Chen, S.; Niu, Z. Estimating Sea level, wind direction, significant wave height, and wave peak period using a geodetic GNSS receiver. Remote Sens. Environ. 2022, 279, 113135. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | RMSE (m) | MAE (m) | CC | MAPE (%) |
|---|---|---|---|---|
| DDMA | 0.51 | 0.40 | 0.87 | 26.04 |
| LES | 0.53 | 0.40 | 0.87 | 23.42 |
| TES | 0.56 | 0.42 | 0.86 | 22.99 |
| PSO | 0.42 | 0.32 | 0.91 | 20.53 |
| SA-PSO | 0.39 | 0.30 | 0.92 | 18.98 |
| RMSE | MAE | CC | MAPE | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Methods | DDMA | LES | TES | DDMA | LES | TES | DDMA | LES | TES | DDMA | LES | TES |
| PSO | 19.57 | 19.73 | 24.02 | 16.80 | 16.64 | 20.44 | 6.25 | 6.43 | 8.49 | 18.70 | 16.92 | 17.65 |
| SA-PSO | 26.73 | 26.87 | 30.78 | 25.42 | 25.28 | 28.68 | 8.06 | 8.24 | 10.34 | 24.15 | 22.49 | 23.17 |
| ERA5 | DDMA | LES | TES | PSO | SA-PSO | |
|---|---|---|---|---|---|---|
| Mean swell height (m) | 2.61 | 2.60 | 2.68 | 2.69 | 2.68 | 2.63 |
| Standard deviation (m) | 0.88 | 0.85 | 0.87 | 0.87 | 0.86 | 0.82 |
| SA-PSO Method Swell Height vs. ERA5 Swell Height | SA-PSO Method Swell Height vs. ERA5 SWH (Hs) | |||||||
|---|---|---|---|---|---|---|---|---|
| RMSE (m) | MAE (m) | CC | MAPE (%) | RMSE (m) | MAE (m) | CC | MAPE (%) | |
| CY01 | 0.45 | 0.35 | 0.89 | 17.57 | 0.70 | 0.51 | 0.72 | 30.97 |
| CY02 | 0.45 | 0.35 | 0.90 | 17.44 | 0.71 | 0.52 | 0.72 | 31.54 |
| CY03 | 0.45 | 0.35 | 0.90 | 17.43 | 0.67 | 0.51 | 0.73 | 31.11 |
| CY04 | 0.45 | 0.35 | 0.90 | 17.44 | 0.69 | 0.52 | 0.72 | 31.48 |
| CY05 | 0.41 | 0.32 | 0.91 | 17.56 | 0.67 | 0.51 | 0.73 | 31.33 |
| CY06 | 0.46 | 0.35 | 0.90 | 17.58 | 0.72 | 0.53 | 0.70 | 31.76 |
| CY07 | 0.45 | 0.34 | 0.90 | 17.72 | 0.69 | 0.51 | 0.73 | 31.14 |
| CY08 | 0.45 | 0.35 | 0.89 | 17.57 | 0.68 | 0.51 | 0.72 | 30.68 |
| Eight CYGNSS | 0.39 | 0.30 | 0.92 | 18.98 | 0.58 | 0.40 | 0.81 | 25.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bu, J.; Yu, K.; Park, H.; Huang, W.; Han, S.; Yan, Q.; Qian, N.; Lin, Y. Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites. Remote Sens. 2022, 14, 4634. https://doi.org/10.3390/rs14184634
Bu J, Yu K, Park H, Huang W, Han S, Yan Q, Qian N, Lin Y. Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites. Remote Sensing. 2022; 14(18):4634. https://doi.org/10.3390/rs14184634
Chicago/Turabian StyleBu, Jinwei, Kegen Yu, Hyuk Park, Weimin Huang, Shuai Han, Qingyun Yan, Nijia Qian, and Yiruo Lin. 2022. "Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites" Remote Sensing 14, no. 18: 4634. https://doi.org/10.3390/rs14184634
APA StyleBu, J., Yu, K., Park, H., Huang, W., Han, S., Yan, Q., Qian, N., & Lin, Y. (2022). Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites. Remote Sensing, 14(18), 4634. https://doi.org/10.3390/rs14184634