
Cross-Comparison between Sun-Synchronized and Geostationary Satellite-Derived Land Surface Temperature: A Case Study in Hong Kong





Abstract
:
1. Introduction
2. Study Area and Data
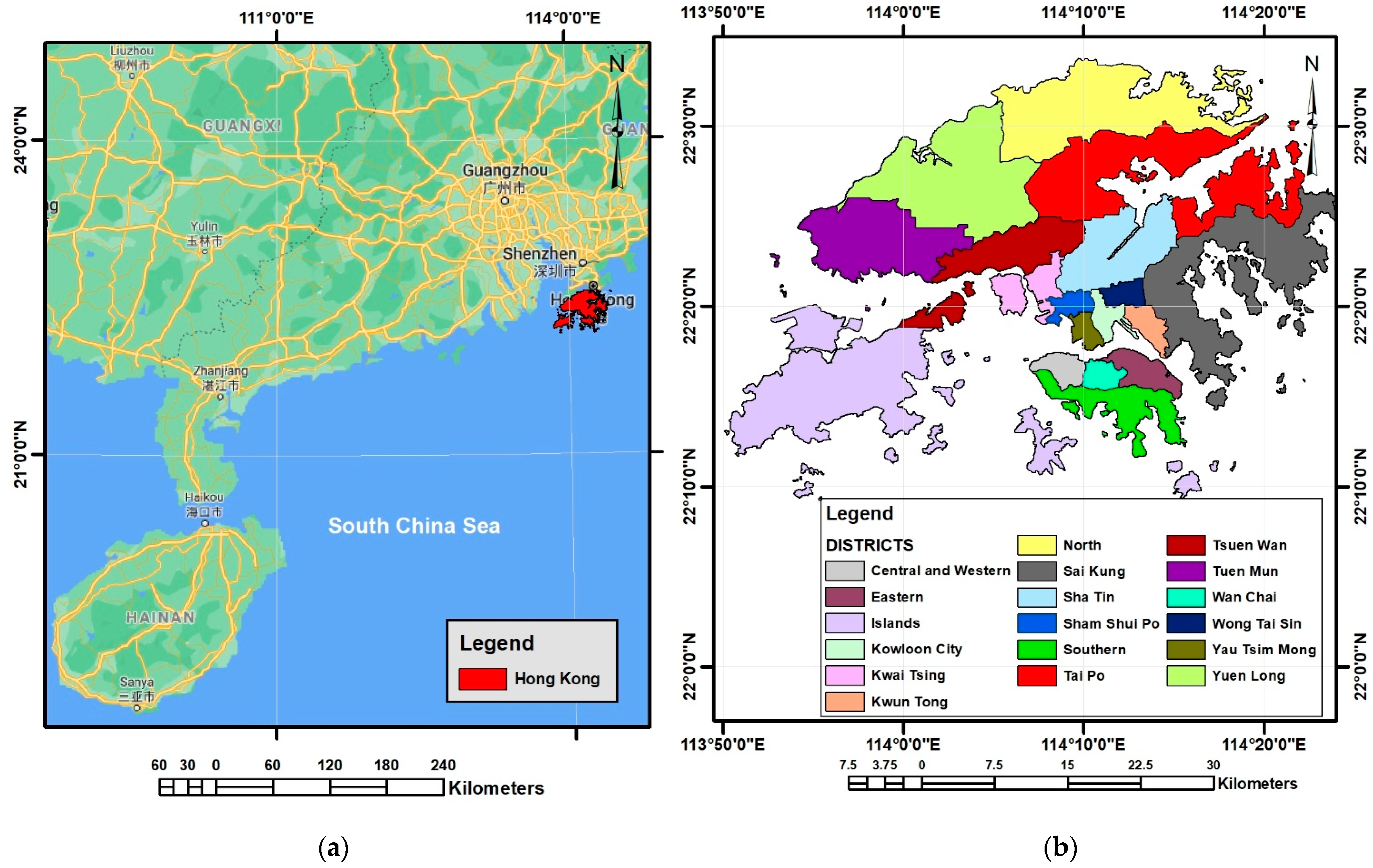
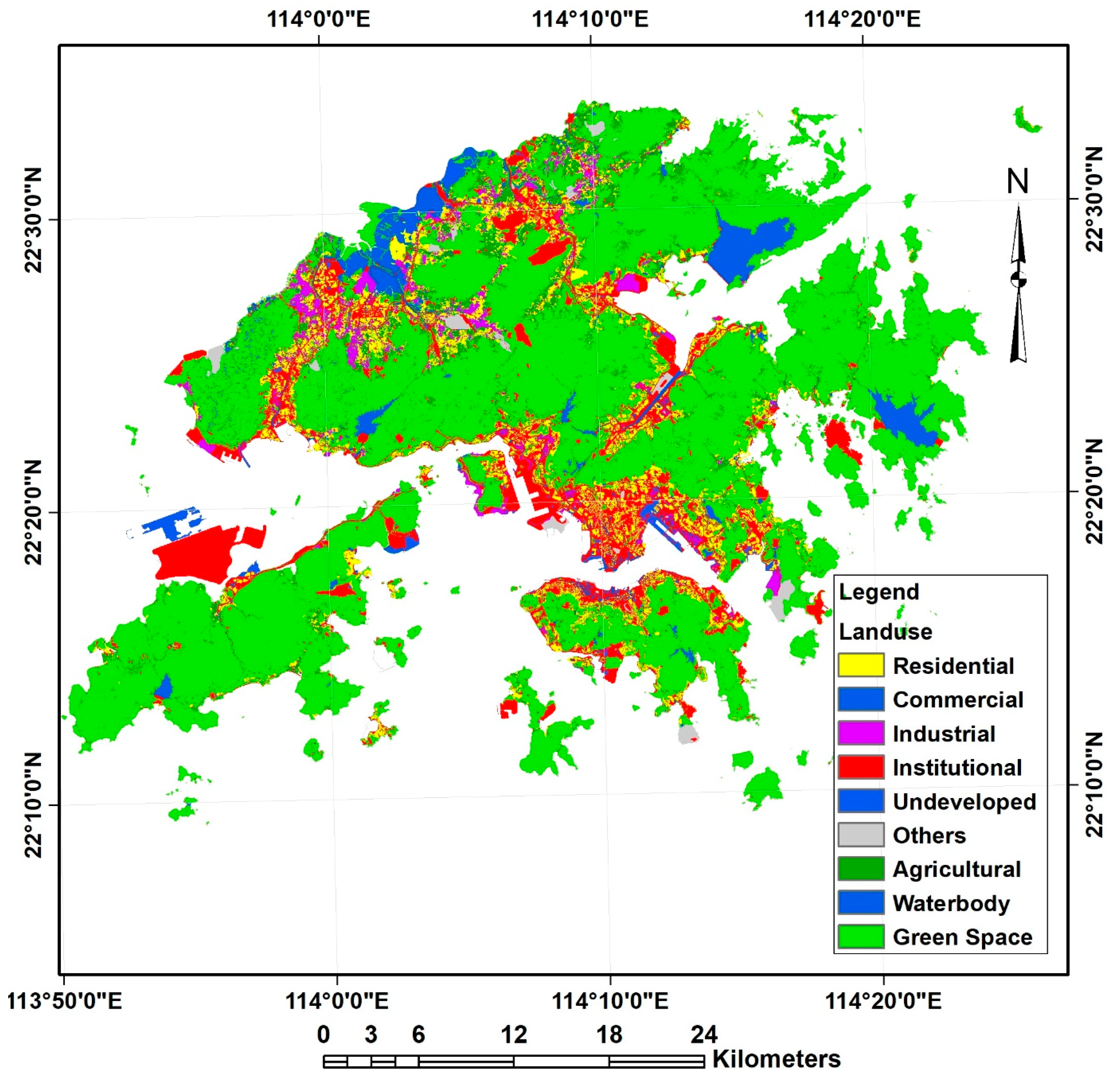
2.1. Study Area
2.2. Data
2.2.1. Landsat-8 Satellite Data
2.2.2. Sentinel-3 SLSTR Data
2.2.3. Himawari-8 Satellite Data
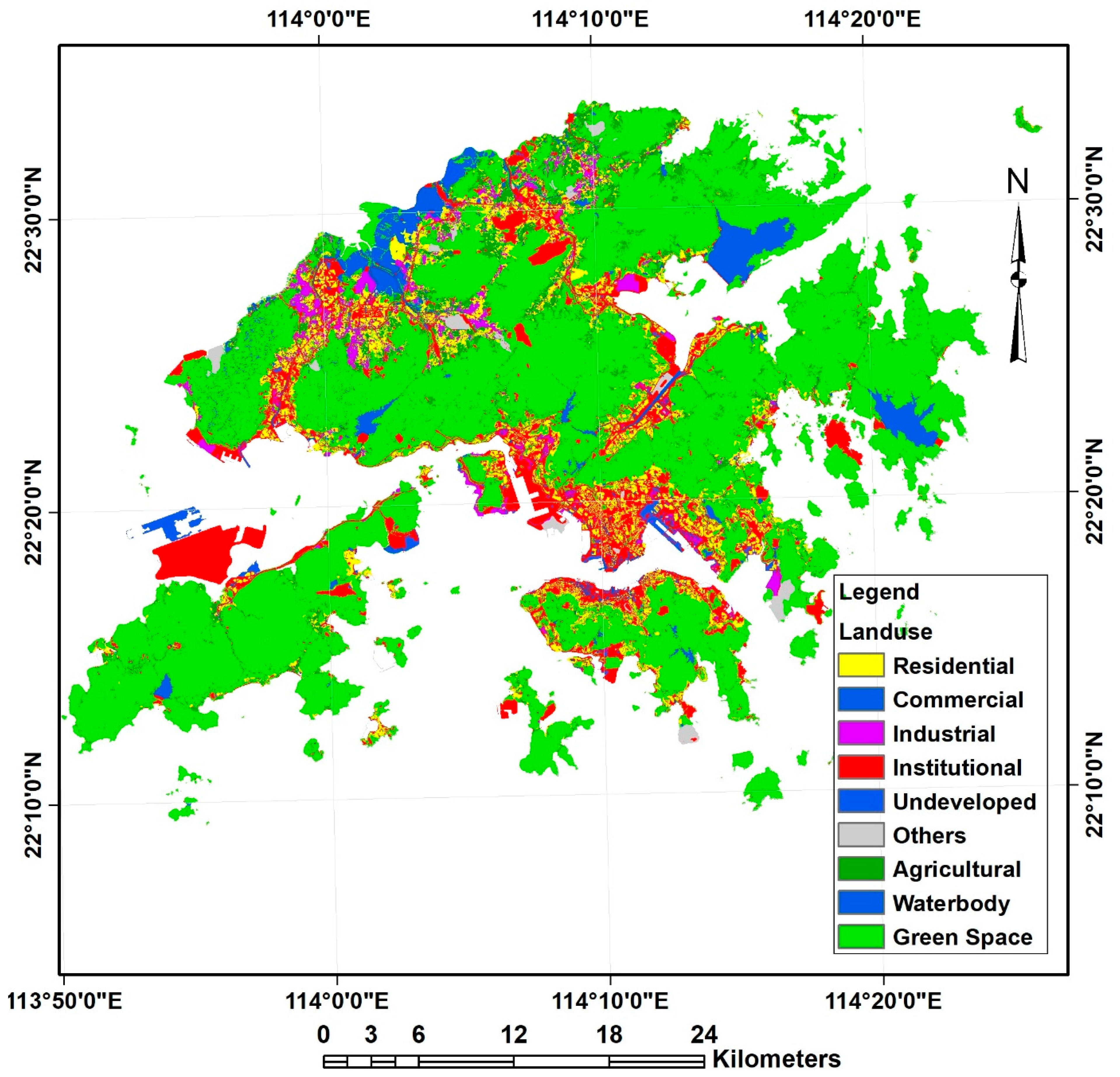
2.2.4. Land Use Data
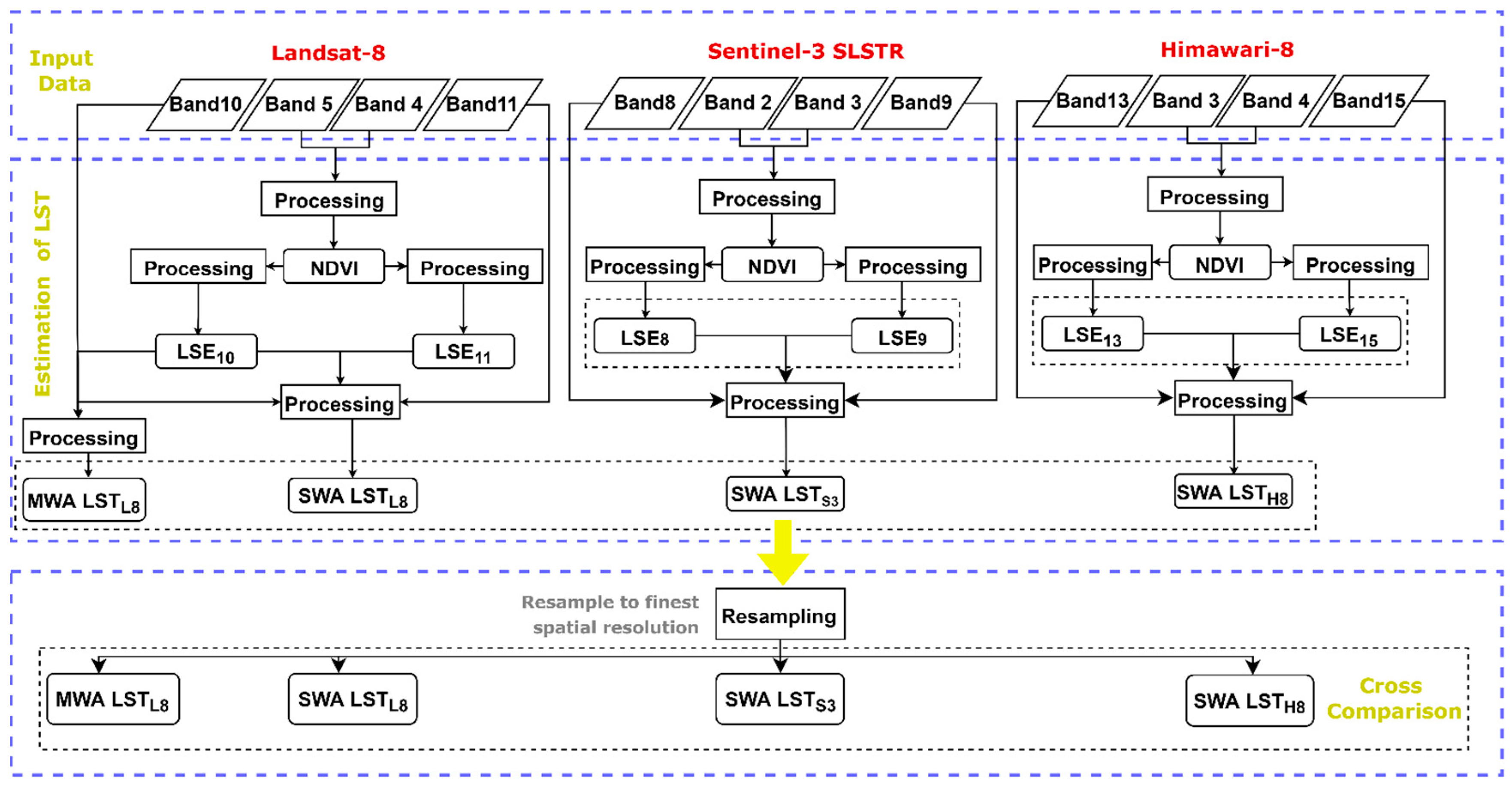
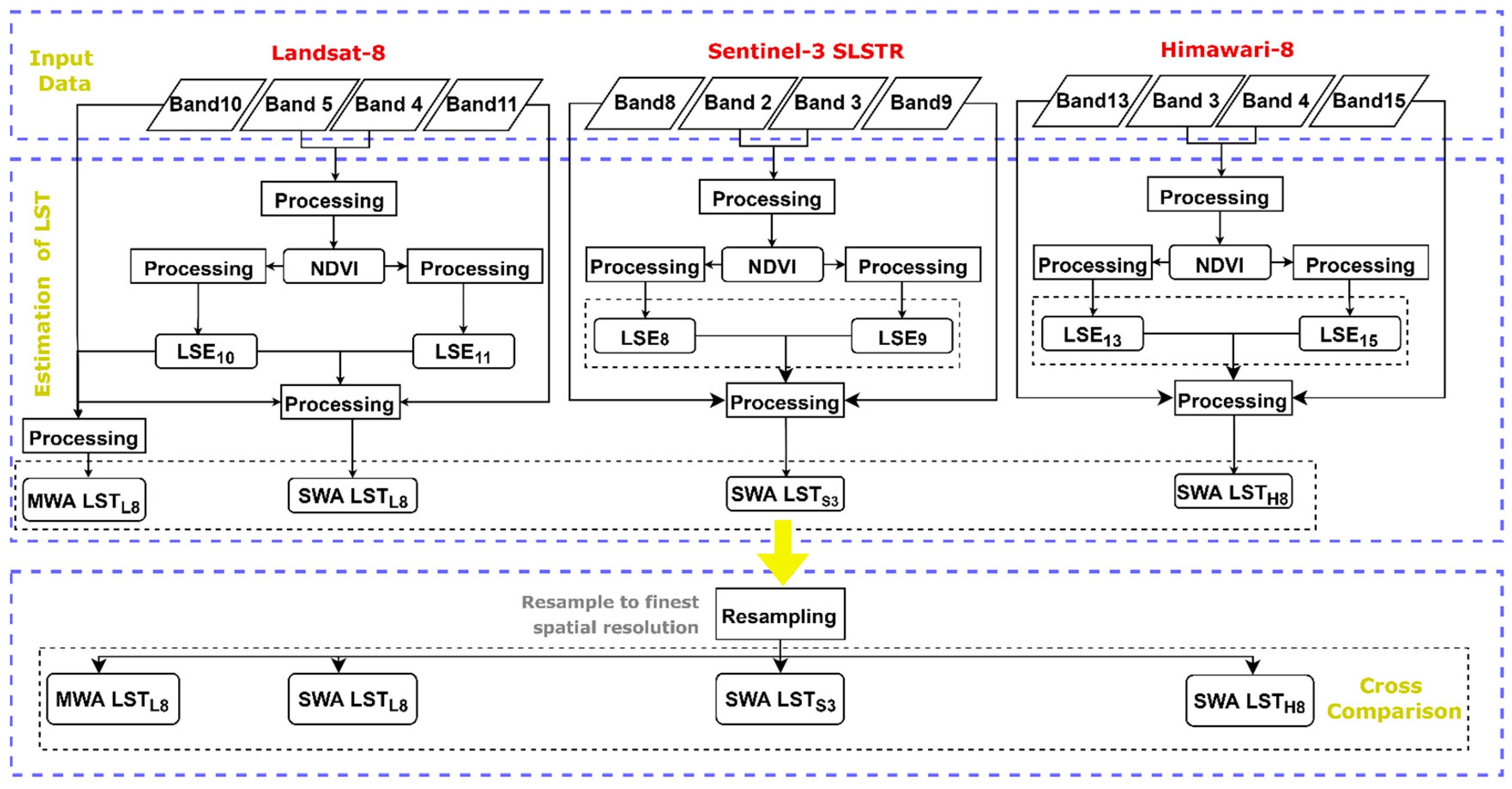
3. Methodology
3.1. Estimation of LST from Satellite Data
3.1.1. LST Retrieval from Landsat-8
- Mono-Window Algorithm
- Split-Window Algorithm
- Calculating Land Surface Emissivity
3.1.2. LST Retrieval from Sentinel-3 SLSTR
3.1.3. LST Retrieval from Himawari-8
3.2. Cross-Comparison of LSTs from Satellite Data
4. Results
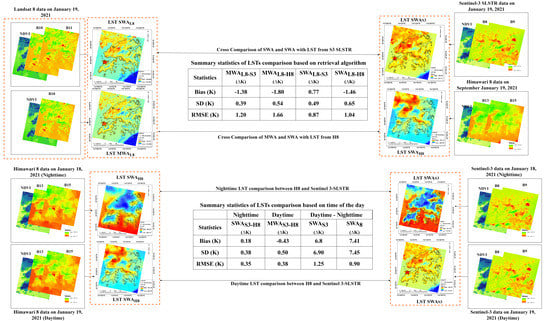
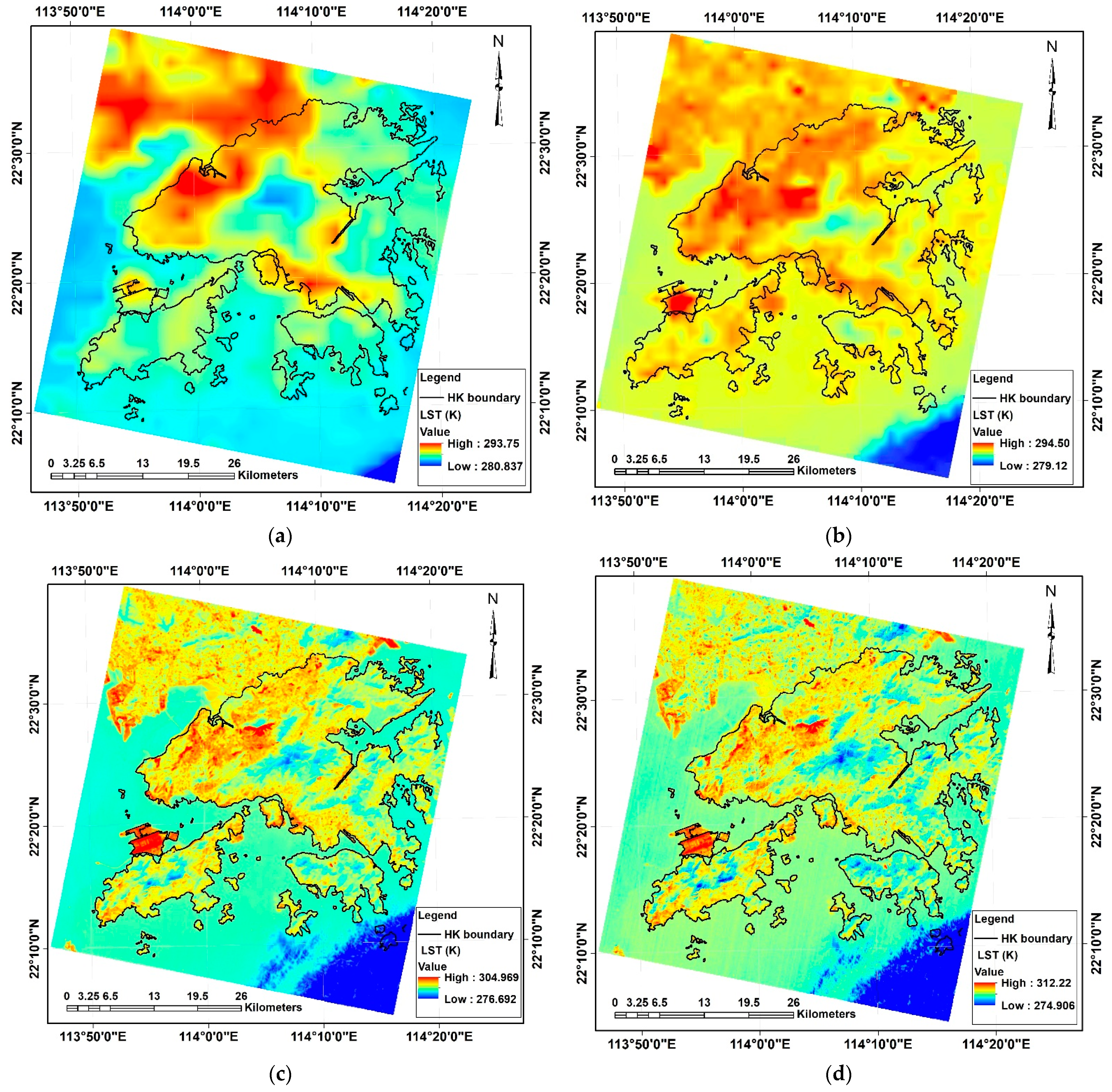
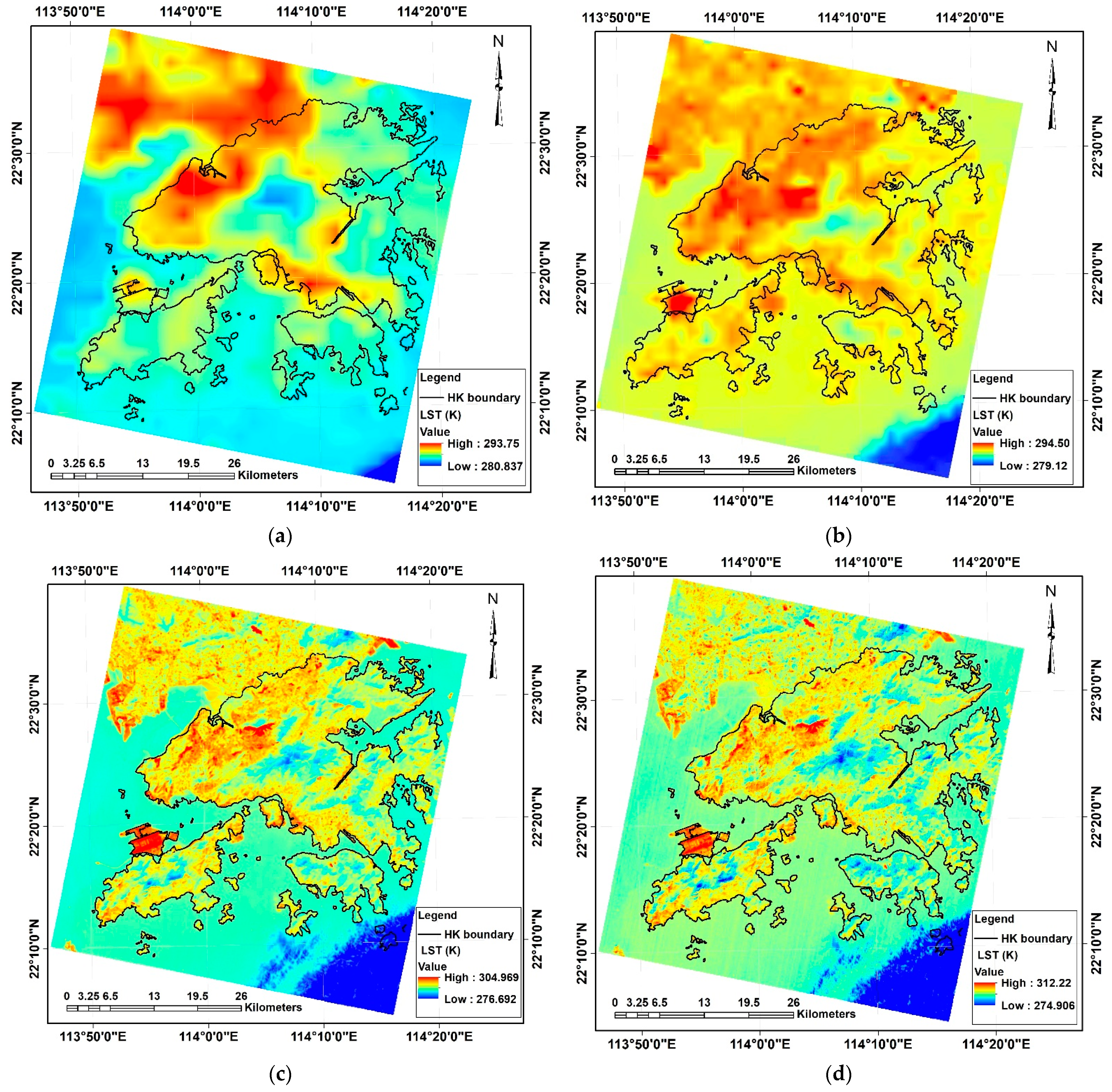
4.1. Comparison of Remotely Sensed LSTs Retrieved Using Different Retrieval Algoritims
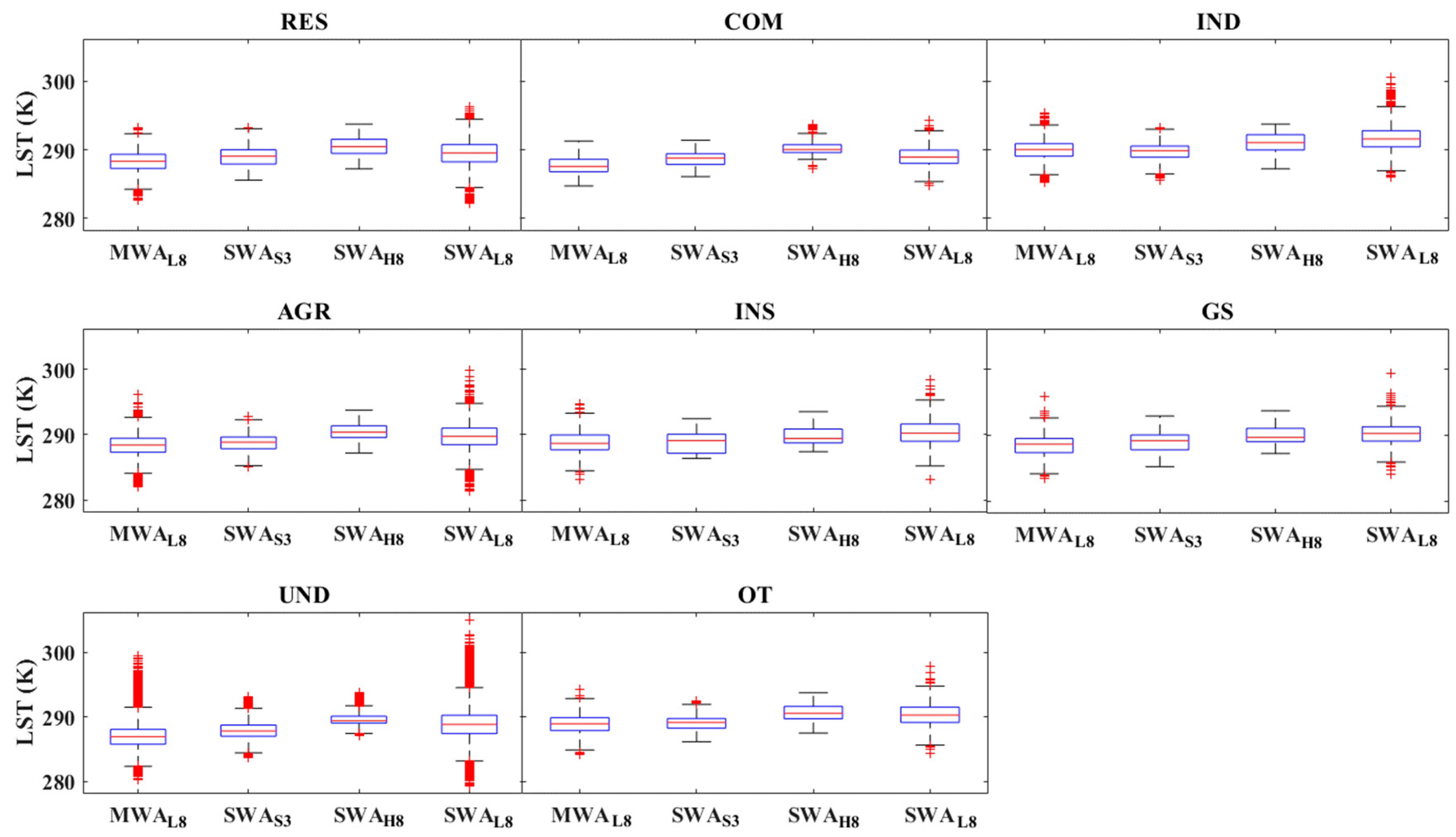
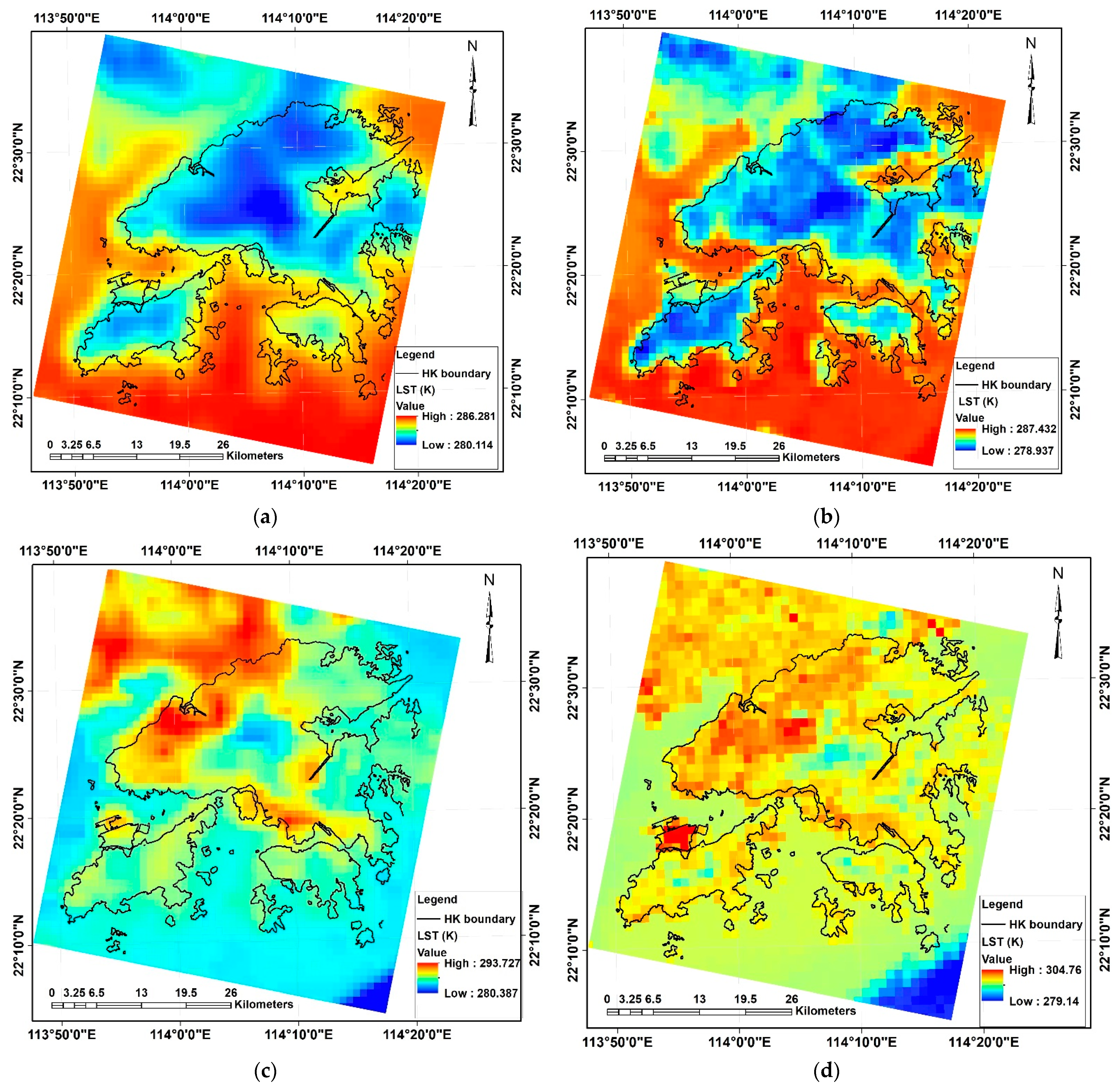
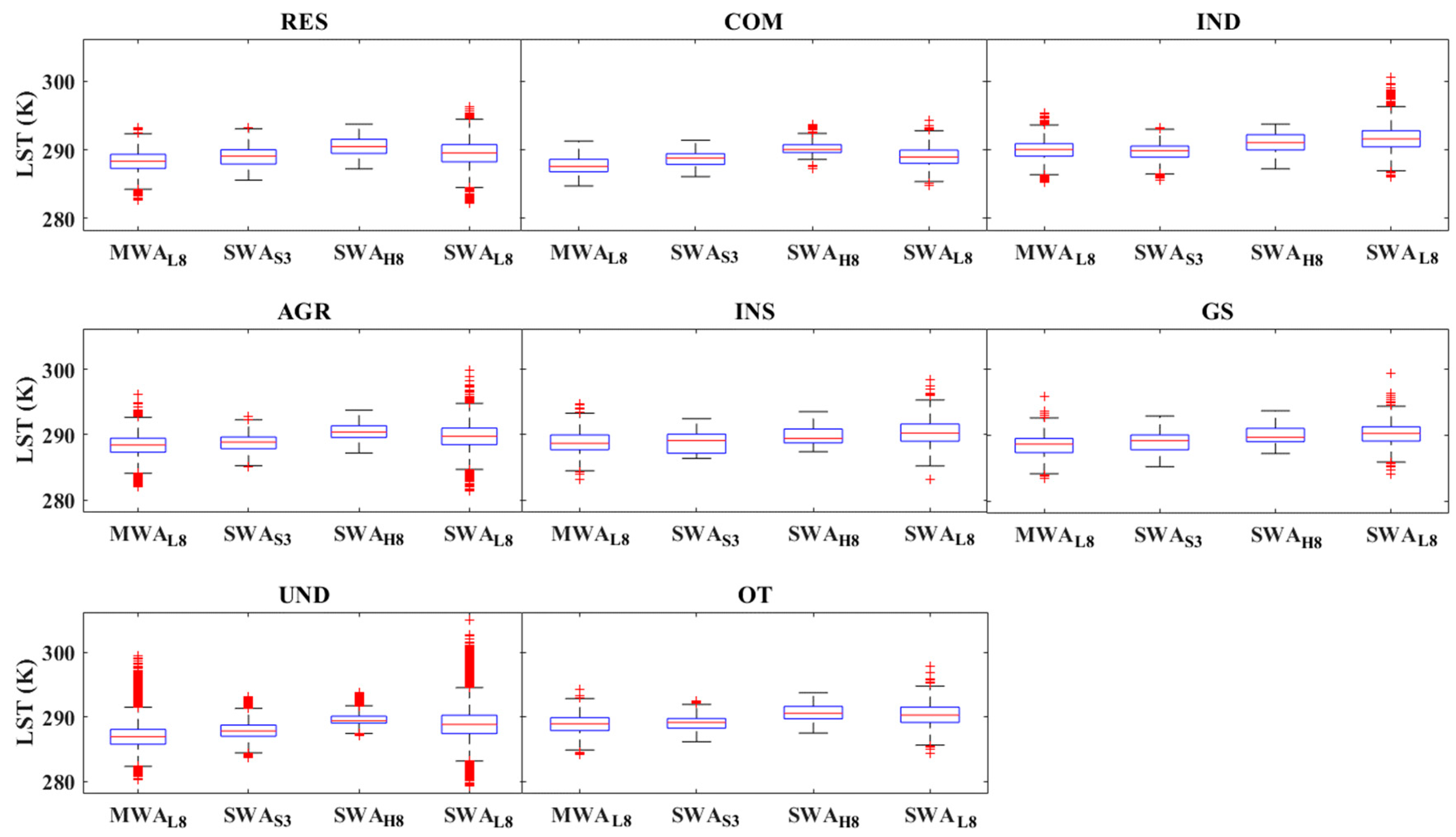
4.2. Cross-Comparison between Remotely Sensed LST during Daytime and Nightime
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Duan, S.B.; Li, Z.L. Intercomparison of Operational Land Surface Temperature Products Derived From MSG-SEVIRI and Terra/Aqua-MODIS Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4163–4170. [Google Scholar] [CrossRef]
- Quan, J.; Zhan, W.; Ma, T.; Du, Y.; Guo, Z.; Qin, B. An integrated model for generating hourly Landsat-like land surface temperatures over heterogeneous landscapes. Remote Sens. Environ. 2018, 206, 403–423. [Google Scholar] [CrossRef]
- Sun, D.; Yu, Y.; Yang, H.; Fang, L.; Liu, Q.; Shi, J. A case study for intercomparison of land surface temperature retrieved from GOES and MODIS. Int. J. Digit. Earth 2014, 8, 476–494. [Google Scholar] [CrossRef]
- Liu, Y.; Hiyama, T.; Yamaguchi, Y. Scaling of land surface temperature using satellite data: A case examination on ASTER and MODIS products over a heterogeneous terrain area. Remote Sens. Environ. 2006, 105, 115–128. [Google Scholar] [CrossRef]
- Neteler, M. Estimating Daily Land Surface Temperatures in Mountainous Environments by Reconstructed MODIS LST Data. Remote Sens. 2010, 2, 333–351. [Google Scholar] [CrossRef]
- Januar, T.W.; Lin, T.H.; Huang, C.Y.; Chang, K.-E. Modifying an Image Fusion Approach for High Spatiotemporal LST Retrieval in Surface Dryness and Evapotranspiration Estimations. Remote Sens. 2020, 12, 498. [Google Scholar] [CrossRef]
- Li, Z.L.; Tang, B.H.; Wu, H.; Ren, H.; Yan, G.; Wan, Z.; Trigo, I.F.; Sobrino, J.A. Satellite-derived land surface temperature: Current status and perspectives. Remote Sens. Environ. 2013, 131, 14–37. [Google Scholar] [CrossRef]
- Inamdar, A.K.; French, A.; Hook, S.; Vaughan, G.; Luckett, W. Land surface temperature retrieval at high spatial and temporal resolutions over the southwestern United States. J. Geophys. Res. Atmos. 2008, 113, D7. [Google Scholar] [CrossRef]
- Sun, D.; Pinker, R.T. Estimation of land surface temperature from a Geostationary Operational Environmental Satellite (GOES-8). J. Geophys. Res. Atmos. 2003, 108, D11. [Google Scholar] [CrossRef]
- Mao, Q.; Peng, J.; Wang, Y. Resolution Enhancement of Remotely Sensed Land Surface Temperature: Current Status and Perspectives. Remote Sens. 2021, 13, 1306. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Oltra-Carrió, R.; Sòria, G.; Bianchi, R.; Paganini, M. Impact of spatial resolution and satellite overpass time on evaluation of the surface urban heat island effects. Remote Sens. Environ. 2012, 117, 50–56. [Google Scholar] [CrossRef]
- Kim, M.; Cho, K.; Kim, H.; Kim, Y. Spatiotemporal Fusion of High Resolution Land Surface Temperature Using Thermal Sharpened Images from Regression-Based Urban Indices. ISPRS Annals Photogramm. Remote Sens. Spat. Inf. Sci. 2020, V-3-2020, 247–254. [Google Scholar] [CrossRef]
- Bai, Y.; Wong, M.S.; Shi, W.Z.; Wu, L.X.; Qin, K. Advancing of land surface temperature retrieval using extreme learning machine and spatio-temporal adaptive data fusion algorithm. Remote Sens. 2015, 7, 4424–4441. [Google Scholar] [CrossRef]
- Wang, F.; Qin, Z.; Song, C.; Tu, L.; Karnieli, A.; Zhao, S. An improved mono-window algorithm for land surface temperature retrieval from Landsat 8 thermal infrared sensor data. Remote Sens. 2015, 7, 4268–4289. [Google Scholar] [CrossRef]
- Mancino, G.; Ferrara, A.; Padula, A.; Nolè, A. Cross-Comparison between Landsat 8 (OLI) and Landsat 7 (ETM+) Derived Vegetation Indices in a Mediterranean Environment. Remote Sens. 2020, 12, 291. [Google Scholar] [CrossRef]
- Martínez-Beltrán, C.; Jochum, M.A.O.; Calera, A.; Meliá, J. Multisensor comparison of NDVI for a semi-arid environment in Spain. Int. J. Remote Sens. 2019, 30, 1355–1384. [Google Scholar] [CrossRef]
- García-Santos, V.; Cuxart, J.; Martínez-Villagrasa, D.; Jiménez, M.A.; Simó, G. Comparison of three methods for estimating land surface temperature from landsat 8-tirs sensor data. Remote Sens. 2018, 10, 1450. [Google Scholar] [CrossRef]
- Jee, J.B.; Lee, K.T.; Choi, Y.J. Analysis of land surface temperature from MODIS and Landsat satellites using by AWS temperature in capital area. Korean J. Remote Sens. 2014, 30, 315–329. [Google Scholar] [CrossRef]
- Yu, X.; Guo, X.; Wu, Z. Land Surface Temperature Retrieval from Landsat 8 TIRS—Comparison between Radiative Transfer Equation-Based Method, Split Window Algorithm and Single Channel Method. Remote Sens. 2014, 6, 9829–9852. [Google Scholar] [CrossRef] [Green Version]
- Feng, T.; Xu, N. Satellite-Based Monitoring of Annual Coastal Reclamation in Shenzhen and Hong Kong since the 21st Century: A Comparative Study. J. Mar. Sci. Eng. 2021, 9, 48. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y. Urban Heat Island Analysis Using the Landsat TM Data and ASTER Data: A Case Study in Hong Kong. Remote Sens. 2011, 3, 1535–1552. [Google Scholar] [CrossRef]
- Wong, M.S.; Peng, F.; Zou, B.; Shi, W.Z.; Wilson, G.J. Spatially Analyzing the Inequity of the Hong Kong Urban Heat Island by Socio-Demographic Characteristics. Int. J. Environ. Res. Public Health 2016, 13, 317. [Google Scholar] [CrossRef]
- Shi, Y.; Ren, C.; Cai, M.; Lau, K.K.; Lee, T.C.; Wong, W.K. Assessing spatial variability of extreme hot weather conditions in Hong Kong: A land use regression approach. Environ. Res. 2019, 171, 403–415. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Lisha, Y.; Houyin, L. Climatic impacts on energy consumption: Intensive and extensive margins. Energy Econ. 2018, 71, 332–343. [Google Scholar] [CrossRef]
- Zhou, D.; Xiao, J.; Bonafoni, S.; Berger, C.; Deilami, K.; Zhou, Y.; Frolking, S.; Yao, R.; Qiao, Z.; Sobrino, J. Satellite Remote Sensing of Surface Urban Heat Islands: Progress, Challenges, and Perspectives. Remote Sens. 2018, 11, 48. [Google Scholar] [CrossRef]
- Moussavi, M.; Pope, A.; Halberstadt, A.; Trusel, L.; Cioffi, L.; Abdalati, W. Antarctic Supraglacial Lake Detection Using Landsat 8 and Sentinel-2 Imagery: Towards Continental Generation of Lake Volumes. Remote Sens. 2020, 12, 134. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Ishikawa, H.; Oku, Y.; Hu, Z. An Algorithm for Land Surface Temperature Retrieval Using Three Thermal Infrared Bands of Himawari-8. J. Meteorol. Soc. Japan 2018, 96B, 59–76. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Hirohiko, I. Thermal land surface emissivity for retrieving land surface temperature from Himawari-8. J. Meteorol. Soc. Japan 2018, 96B, 43–58. [Google Scholar] [CrossRef]
- United States Geological Survey. Available online: https://glovis.usgs.gov/app?fullscreen=1 (accessed on 4 August 2021).
- Pérez-Planells, L.; Niclòs, R.; Puchades, J.; Coll, C.; Göttsche, F.M.; Valiente, J.A.; Valor, E.; Galve, J.M. Validation of Sentinel-3 SLSTR Land Surface Temperature Retrieved by the Operational Product and Comparison with Explicitly Emissivity-Dependent Algorithms. Remote Sens. 2021, 13, 2228. [Google Scholar] [CrossRef]
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 3 March 2022).
- Choi, Y.Y.; Suh, M.S. Development of Himawari-8/Advanced Himawari Imager (AHI) Land Surface Temperature Retrieval Algorithm. Remote Sens. 2018, 10, 2013. [Google Scholar] [CrossRef]
- Stephens, L.; Fuller, D.; Boivin, N.; Rick, T.; Gauthier, N.; Kay, A.; Marwick, B.; Armstrong, C.G.; Barton, C.M.; Denham, T. Archaeological assessment reveals Earth’s early transformation through land use. Science 2019, 365, 897–902. [Google Scholar] [CrossRef] [PubMed]
- Shirahata, L.M.; Iizuka, K.; Yusupujiang, A.; Rinawan, F.R.; Bhattarai, R.; Dong, X. Production of global land cover data–GLCNMO2013. J. Geogr. Geol. 2017, 9, 1–15. [Google Scholar]
- Hong Kong Planning Department. (1 January 2021) Raster Grids on Land Utilization. Available online: https://data.gov.hk/en-data/dataset/hk-pland-pland1-land-utilization-in-hong-kong-raster-grid (accessed on 9 May 2022).
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping urban land use by using Landsat images and open social data. Remote Sens. 2016, 8, 151–169. [Google Scholar] [CrossRef]
- Avdan, U.; Jovanovska, G. Algorithm for Automated Mapping of Land Surface Temperature Using LANDSAT 8 Satellite Data. J. Sens. 2016, 2016, 1480307. [Google Scholar] [CrossRef]
- Rozenstein, O.; Qin, Z.; Derimian, Y.; Karnieli, A. Derivation of land surface temperature for Landsat-8 TIRS using a split window algorithm. Sensors 2014, 14, 5768–5780. [Google Scholar] [CrossRef]
- Sekertekin, A.; Bonafoni, S. Land Surface Temperature Retrieval from Landsat 5, 7, and 8 over Rural Areas: Assessment of Different Retrieval Algorithms and Emissivity Models and Toolbox Implementation. Remote Sens. 2020, 12, 294. [Google Scholar] [CrossRef]
- Jin, M.; Li, J.; Wang, C.; Shang, R. A Practical Split-Window Algorithm for Retrieving Land Surface Temperature from Landsat-8 Data and a Case Study of an Urban Area in China. Remote Sens. 2015, 7, 4371–4390. [Google Scholar] [CrossRef]
- Yang, J.; Wong, M.S.; Menenti, M.; Nichol, J. Study of the geometry effect on land surface temperature retrieval in urban environment. ISPRS J. Photogramm. Remote Sens. 2015, 109, 77–87. [Google Scholar] [CrossRef]
- Sobrino, J.; Raissouni, N.; Li, Z.L. A comparative study of land surface emissivity retrieval from NOAA data. Remote Sens. Environ. 2001, 75, 256–266. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jiménez-Muñoz, J.C.; Paolini, L. Land surface temperature retrieval from LANDSAT TM 5. Remote Sens. 2004, 90, 434–440. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jimenez-Munoz, J.C.; Soria, G.; Romaguera, M.; Guanter, L.; Moreno, J.; Plaza, A.; Martinez, P. Land Surface Emissivity Retrieval from Different VNIR and TIR Sensors. IEEE Trans. Geosci. Remote Sens. 2008, 46, 316–327. [Google Scholar] [CrossRef]
- Hafeez, S.; Wong, M.S.; Abbas, S.; Jiang, G. Assessing the Potential of Geostationary Himawari-8 for Mapping Surface Total Suspended Solids and Its Diurnal Changes. Remote Sens. 2021, 13, 336. [Google Scholar] [CrossRef]
- Atitar, M.; Sobrino, J.A. A split-window algorithm for estimating LST from Meteosat 9 data: Test and comparison with in-situ data and MODIS LSTs. IEEE Geosci. Remote Sens. Lett. 2008, 6, 122–126. [Google Scholar] [CrossRef]
- Wu, P.; Shen, H.; Zhang, L.; Göttsche, F.M. Integrated fusion of multi-scale polar-orbiting and geostationary satellite observations for the mapping of high spatial and temporal resolution land surface temperature. Remote Sens. Environ. 2014, 156, 169–181. [Google Scholar] [CrossRef]
- Hazaymeh, K.; Hassan, Q.K. Fusion of MODIS and Landsat-8 surface temperature images: A new approach. PLoS ONE 2015, 10, e0117755. [Google Scholar]
- Bolton, D.K.; Gray, J.M.; Melaas, E.K.; Moon, M.; Eklundh, L.; Friedl, M.A. Continental-scale land surface phenology from harmonized Landsat 8 and Sentinel-2 imagery. Remote Sens. Environ. 2020, 240, 111685. [Google Scholar] [CrossRef]
- Lu, Y.; Yue, W.; Huang, Y. Effects of Land Use on Land Surface Temperature: A Case Study of Wuhan, China. Int. J. Environ. Res. Public Health 2021, 18, 9987. [Google Scholar] [CrossRef] [PubMed]
- Awuh, M.E.; Japhets, P.O.; Officha, M.C.; Okolie, A.O.; Enete, I.C. A correlation analysis of the relationship between land use and land cover/land surface temperature in Abuja Municipal, FCT, Nigeria. J. Geogr. Inf. Syst. 2019, 11, 44. [Google Scholar] [CrossRef]
- Trigo, I.F.; Isabel, T.M.; Folke, O.; Ewa, K. An assessment of remotely sensed land surface temperature. J. Geophys. Res. Atmos. 2008, 113, D17. [Google Scholar] [CrossRef]
- Hu, T.; Liu, Q.; Du, Y.; Li, H.; Wang, H.; Cao, B. Analysis of the land surface temperature scaling problem: A case study of airborne and satellite data over the Heihe Basin. Remote Sens. 2015, 7, 6489–6509. [Google Scholar] [CrossRef]
- Guillevic, P.C.; Biard, J.C.; Hulley, G.C.; Privette, J.L.; Hook, S.J.; Olioso, A.; Göttsche, F.M.; Radocinski, R.; Román, M.O.; Yu, Y.; et al. Validation of Land Surface Temperature products derived from the Visible Infrared Imaging Radiometer Suite (VIIRS) using ground-based and heritage satellite measurements. Remote Sens. Environ. 2014, 154, 19–37. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Data | Date | Overpass Time | Period |
|---|---|---|---|
| Landsat 8 | 19 January 2021 | 10:52 am | daytime |
| Sentinel-3 SLSTR | 18 January 2021 | 10:48 pm | nighttime |
| 19 January 2021 | 10:48 am | daytime | |
| Himawari-8 | 18 January 2021 | 10:50 pm | nighttime |
| 19 January 2021 | 10:50 am | daytime |
| S/N | LUHK Class (Abbreviation) | Percentage (%) |
|---|---|---|
| 1 | Residential (RES) | 7.082 |
| 2 | Commercial (COM) | 0.42 |
| 3 | Industrial (IND) | 2.40 |
| 4 | Institutional (INS) | 12.56 |
| 5 | Agricultural (AGR) | 4.41 |
| 6 | Green Space (GS) | 65.73 |
| 7 | Undeveloped (UND) | 1.78 |
| 8 | Waterbody (WB) | 4.21 |
| 9 | Others (OT) | 1.41 |
| Total Land Surface coverage | 100.00 | |
| Model | Water Vapor Range | Equation |
|---|---|---|
| Mid-latitude summer region | 0.2–3.0 g/cm2 | |
| TIR Bands | T Range (°C) | A | B(K) |
|---|---|---|---|
| Band 10 | −10–20 | 0.4087 | −55.58 |
| 20–50 | 0.4464 | −66.61 | |
| Band 11 | −10–20 | 0.4442 | −59.85 |
| 20–50 | 0.4831 | −71.23 |
| ε for Water | ε for Vegetation | ε for Non-Vegetation | |
|---|---|---|---|
| TIR—band 10 | 0.991 | 0.984 | 0.964 |
| TIR—band 11 | 0.986 | 0.980 | 0.970 |
| Coefficient | Value |
|---|---|
| −0.51 | |
| −0.053 | |
| −0.180 | |
| 2.13 | |
| 0.377 | |
| 71.4 | |
| −10.04 | |
| −5.9 |
| Conditions | C0 | C1 | C2 | C3 | C4 | C5 | |
|---|---|---|---|---|---|---|---|
| Moist | 67.1857 | 0.7448 | 2.07 | 1.096 | 63.061 | −75.1606 | |
| Day | Normal | 8.926 | 0.9651 | 0.9364 | −0.1385 | 56.8638 | −63.8708 |
| Dry | 15.3567 | 0.9461 | 1.1996 | −1.411 | 48.5137 | −68.3093 | |
| Moist | 44.5826 | 0.8205 | 2.0427 | 1.6411 | 58.5399 | −59.1371 | |
| Night | Normal | 12.1778 | 0.9535 | 0.9278 | −0.095 | 51.2696 | −51.8349 |
| Dry | 20.3004 | 0.9279 | 1.0879 | −1.4883 | 47.2503 | −61.7212 |
| Band | SZA (°) | ||||||
|---|---|---|---|---|---|---|---|
| 0 | 10 | 20 | 30 | 40 | 50 | 60 | |
| 13 | 0.0104 | 0.0115 | 0.0125 | 0.0136 | 0.0147 | 0.0155 | 0.0161 |
| 14 | 0.0104 | 0.0109 | 0.0114 | 0.0119 | 0.0124 | 0.0128 | 0.0131 |
| 15 | 0.0089 | 0.0092 | 0.0096 | 0.0099 | 0.0102 | 0.0106 | 0.0108 |
| LUHK Class | MWAL8 (K) | SWAS3 (K) | SWAH8 (K) | MWAL8-S3 (∆K) | MWAL8-H8 (∆K) | SWAL8 (K) | SWAL8-S3 (∆K) | SWAL8-H8 (∆K) |
|---|---|---|---|---|---|---|---|---|
| RES | 288.26 | 289.96 | 290.41 | −1.70 | −2.15 | 289.5 | −0.46 | −0.91 |
| COM | 287.88 | 289.53 | 290.4 | −1.65 | −2.52 | 289.04 | −0.49 | −1.36 |
| IND | 289.76 | 290.68 | 290.98 | −0.92 | −1.22 | 291.42 | 0.34 | 0.24 |
| AGR | 288.68 | 290.01 | 290.33 | −1.33 | −1.65 | 290.08 | 0.07 | −0.25 |
| INS | 288.77 | 289.8 | 289.86 | −1.03 | −1.09 | 290.46 | 0.26 | 0.2 |
| GS | 288.21 | 289.91 | 290.03 | −1.70 | −1.82 | 289.95 | 0.04 | −0.08 |
| UND | 287.1 | 288.9 | 289.55 | −1.8 | −2.45 | 289.02 | 0.12 | −0.53 |
| OT | 289.12 | 290 | 290.65 | −0.88 | −1.53 | 290.65 | 0.65 | 0 |
| Bias (K) | −1.38 | −1.80 | 0.77 | −1.46 | ||||
| SD (K) | 0.39 | 0.54 | 0.49 | 0.65 | ||||
| RMSE (K) | 1.20 | 1.66 | 0.87 | 1.04 |
| LUHK Class | Nighttime | Daytime | Daytime–Nighttime | |||||
|---|---|---|---|---|---|---|---|---|
| SWAS3 (K) | SWAH8 (K) | SWAS3-H8 (∆K) | SWAS3 (K) | SWAH8 (K) | SWAS3-H8 (∆K) | SWAS3 (∆K) | SWA-H8 (∆K) | |
| RES | 283.27 | 282.77 | 0.5 | 289.96 | 290.41 | −0.45 | 6.69 | 7.64 |
| COM | 284.97 | 284.24 | 0.73 | 289.53 | 290.4 | −0.87 | 4.56 | 6.16 |
| IND | 282.75 | 282.59 | 0.16 | 290.68 | 290.98 | −0.3 | 8.2 | 8.66 |
| AGR | 281.81 | 281.67 | 0.14 | 290.01 | 290.33 | −0.32 | 7.93 | 8.39 |
| INS | 283.12 | 282.9 | 0.22 | 289.8 | 289.86 | −0.06 | 6.68 | 6.96 |
| GS | 282.46 | 282.48 | −0.02 | 289.91 | 290.03 | −0.12 | 7.45 | 7.55 |
| UND | 283.46 | 283.25 | 0.21 | 288.9 | 289.55 | −0.65 | 5.44 | 6.3 |
| OT | 282.59 | 283.06 | −0.47 | 290 | 290.65 | −0.65 | 7.41 | 7.59 |
| Bias (K) | 0.18 | −0.43 | 6.8 | 7.41 | ||||
| SD (K) | 0.38 | 0.50 | 6.90 | 7.45 | ||||
| RMSE (K) | 0.35 | 0.38 | 1.25 | 0.90 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adeniran, I.A.; Zhu, R.; Yang, J.; Zhu, X.; Wong, M.S. Cross-Comparison between Sun-Synchronized and Geostationary Satellite-Derived Land Surface Temperature: A Case Study in Hong Kong. Remote Sens. 2022, 14, 4444. https://doi.org/10.3390/rs14184444
Adeniran IA, Zhu R, Yang J, Zhu X, Wong MS. Cross-Comparison between Sun-Synchronized and Geostationary Satellite-Derived Land Surface Temperature: A Case Study in Hong Kong. Remote Sensing. 2022; 14(18):4444. https://doi.org/10.3390/rs14184444
Chicago/Turabian StyleAdeniran, Ibrahim Ademola, Rui Zhu, Jinxin Yang, Xiaolin Zhu, and Man Sing Wong. 2022. "Cross-Comparison between Sun-Synchronized and Geostationary Satellite-Derived Land Surface Temperature: A Case Study in Hong Kong" Remote Sensing 14, no. 18: 4444. https://doi.org/10.3390/rs14184444
APA StyleAdeniran, I. A., Zhu, R., Yang, J., Zhu, X., & Wong, M. S. (2022). Cross-Comparison between Sun-Synchronized and Geostationary Satellite-Derived Land Surface Temperature: A Case Study in Hong Kong. Remote Sensing, 14(18), 4444. https://doi.org/10.3390/rs14184444