


A Beacons Selection Method under Random Interference for Indoor Positioning
Abstract
:
1. Introduction
- (1)
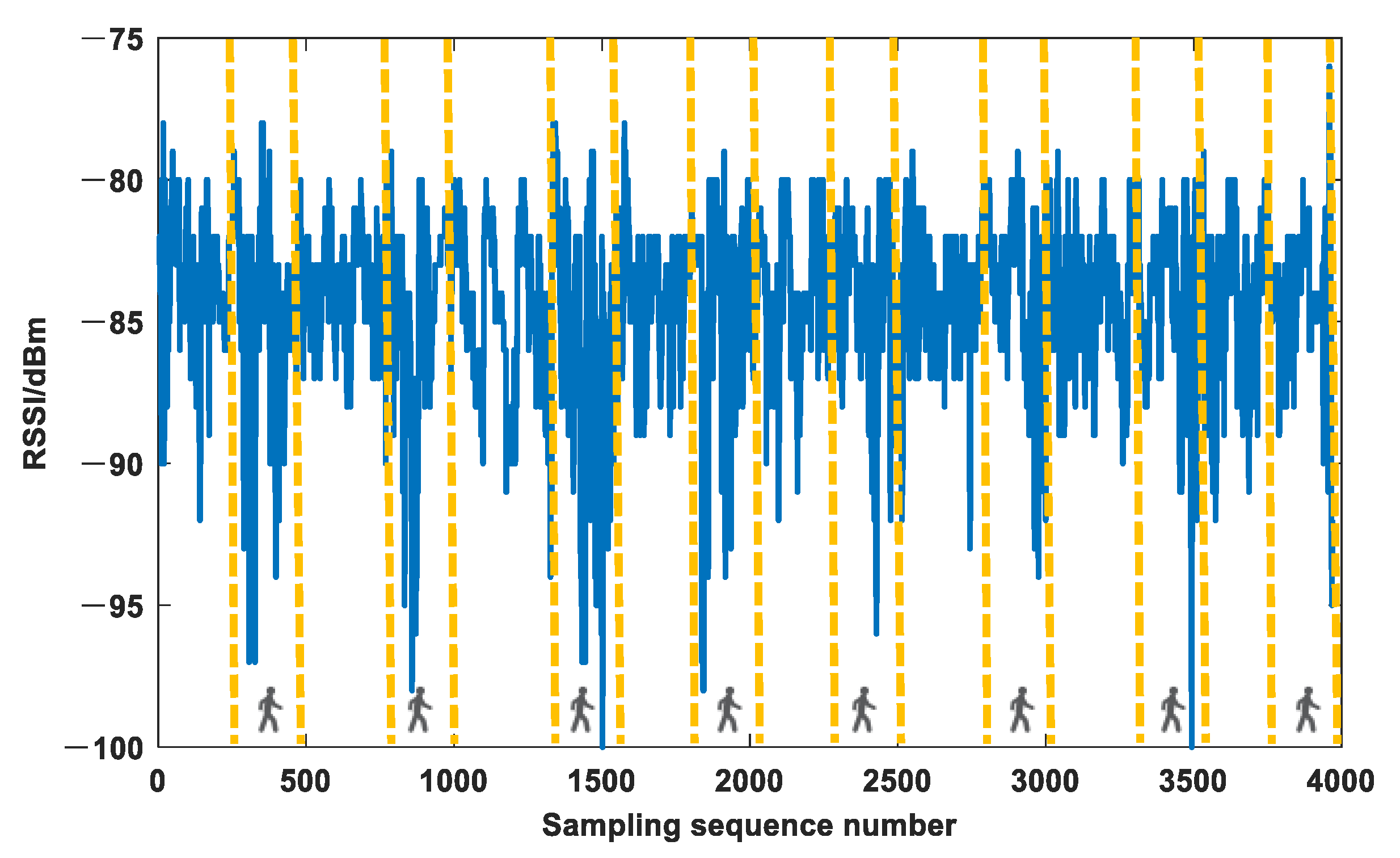
- the effect of pedestrian random walking on real-time indoor positioning was verified;
- (2)
- a fast and real-time Beacons selection method was proposed and verified.
2. Materials and Methods
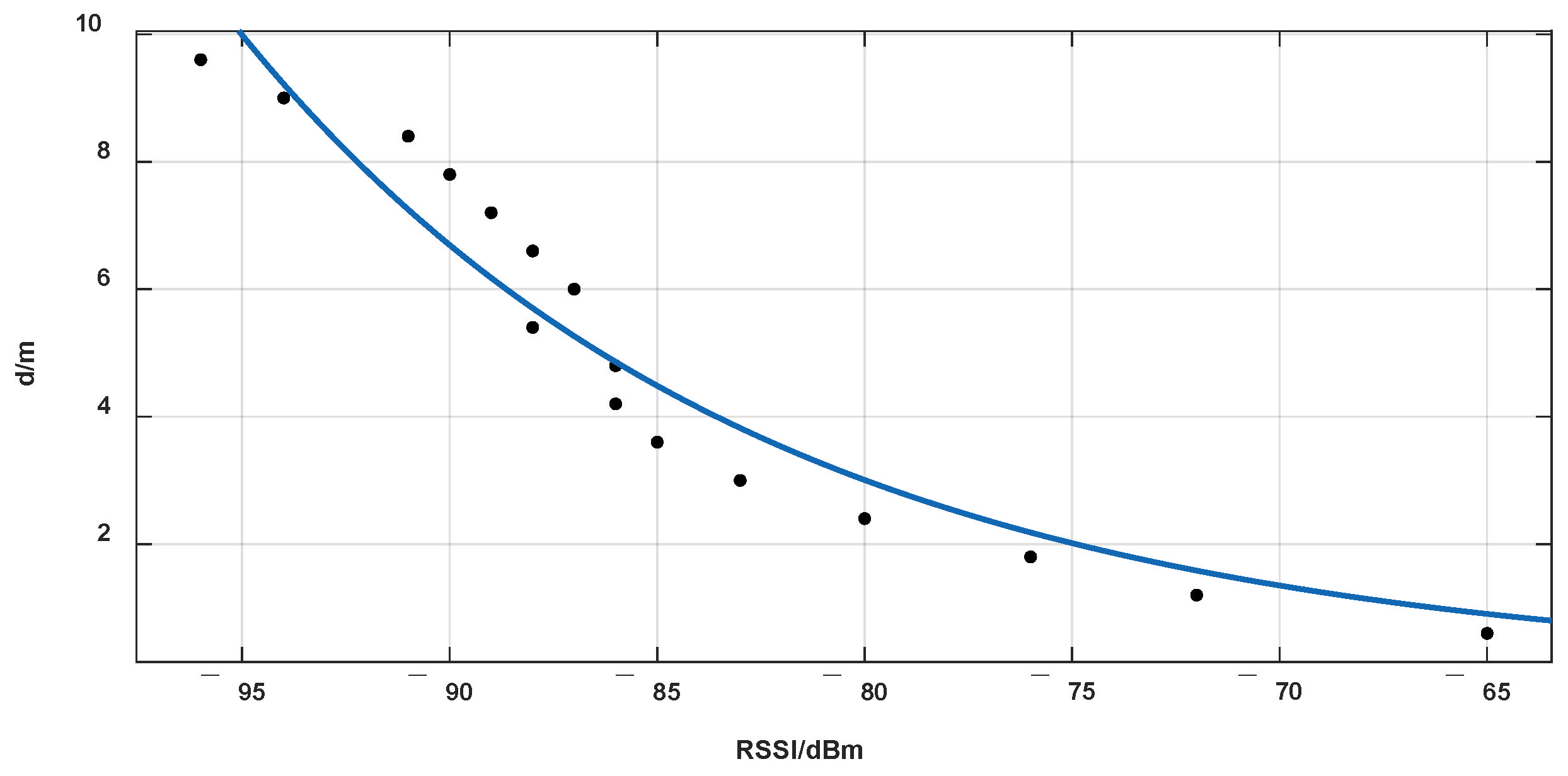
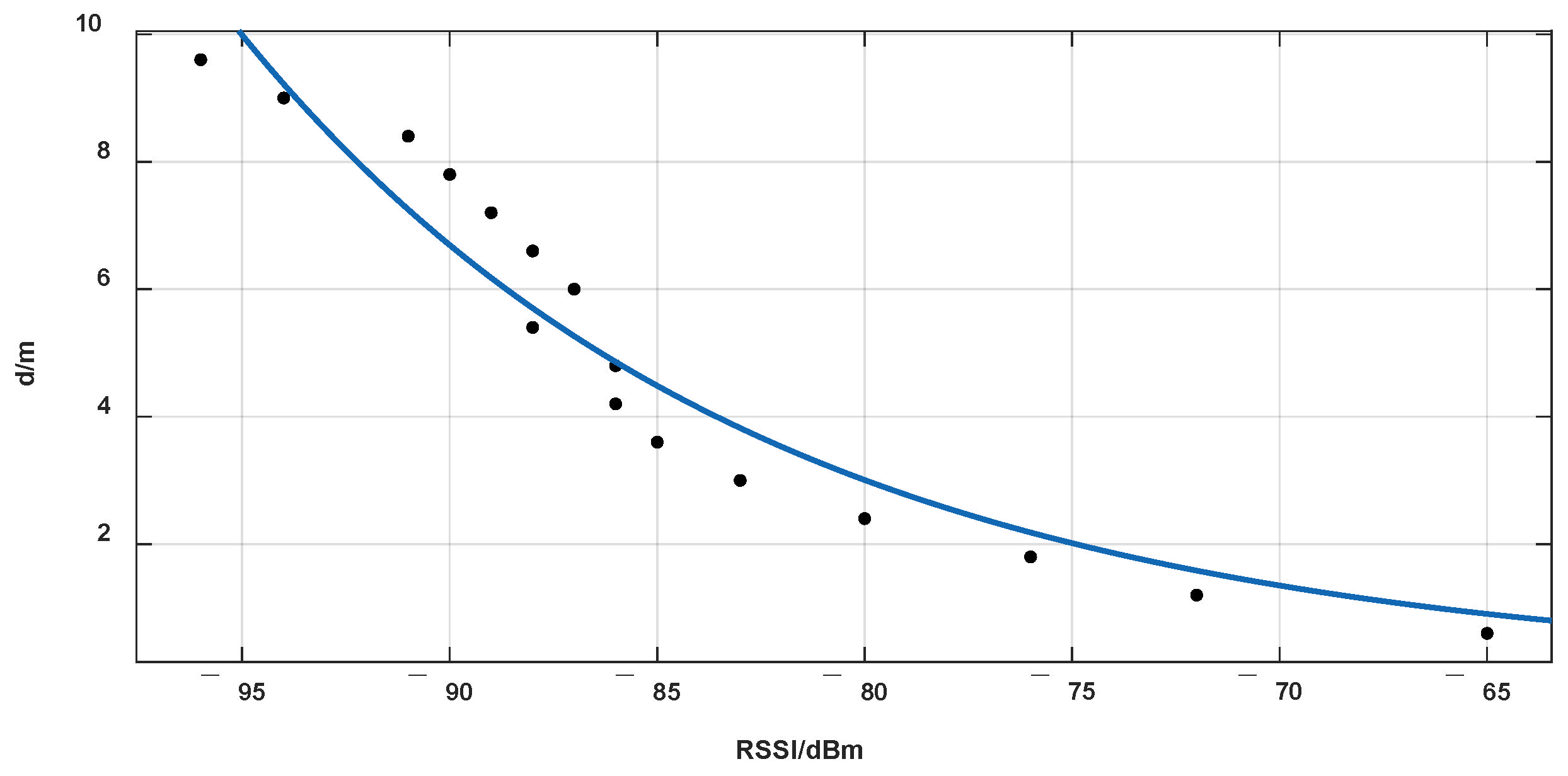
2.1. Indoor Positioning Based on BLE Technology and RSSI
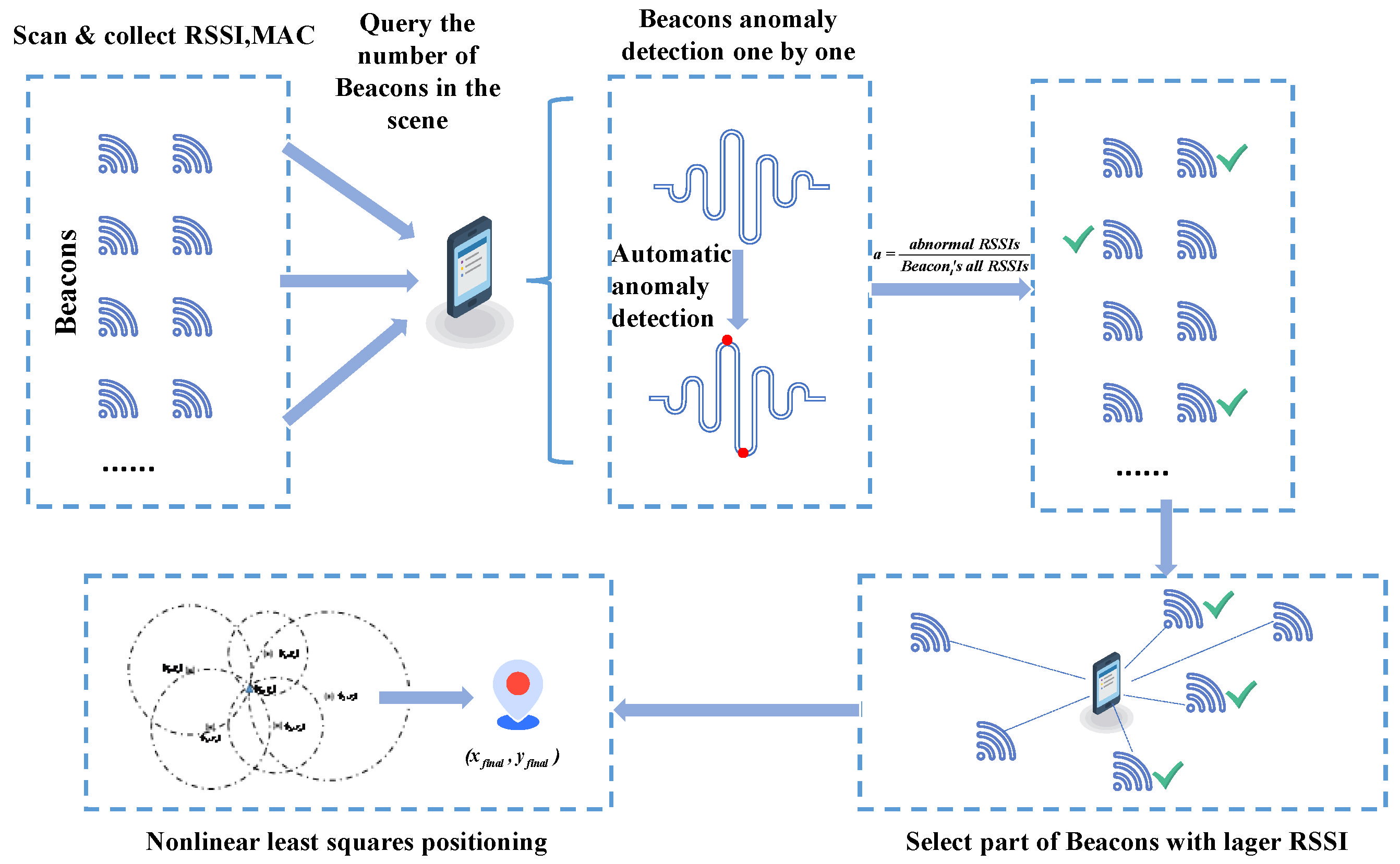
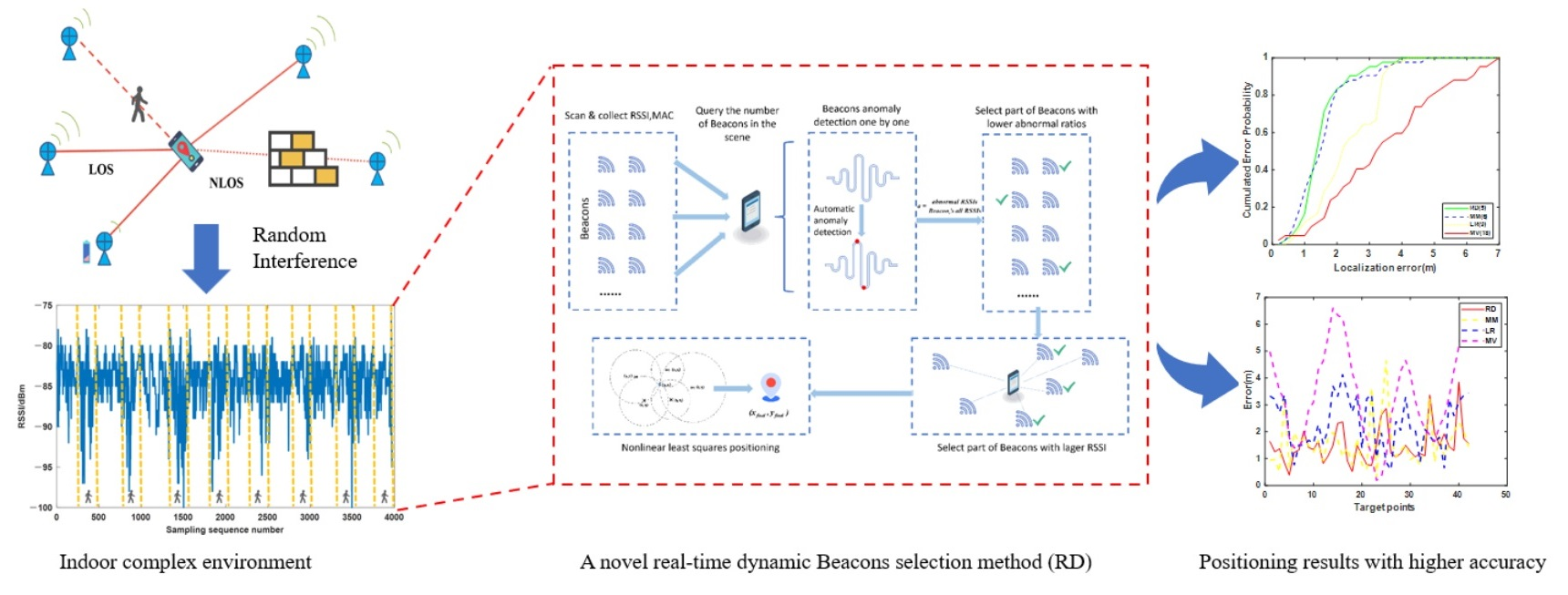
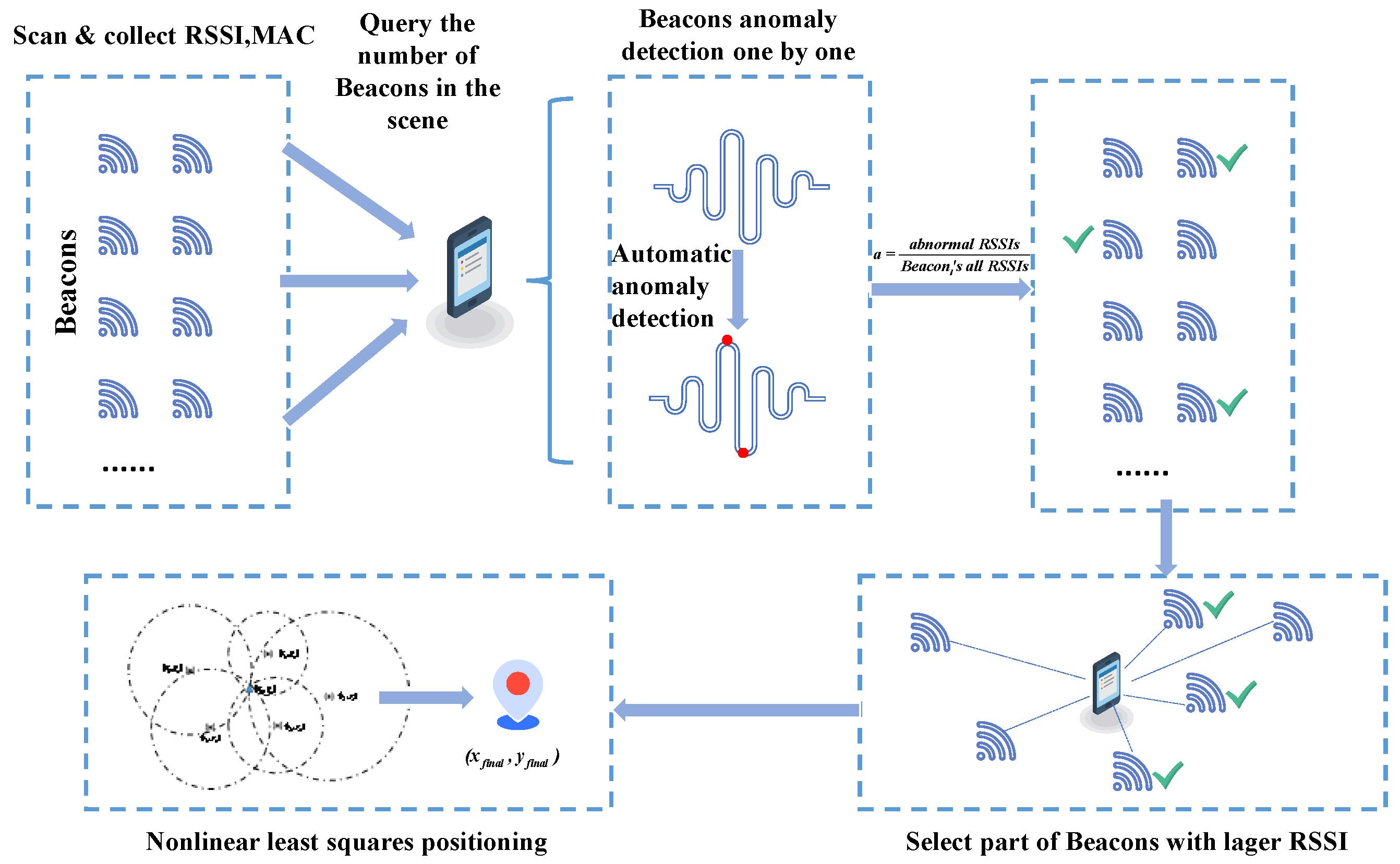
2.2. Signal Real-Time Anomaly Detection and Beacons Selection
| Algorithm 1 Beacons selection based on isolation forest |
| Require: RSSI signals and MACs by Beacons. |
Ensure: Beacons are real coordinates.
|
- (A)
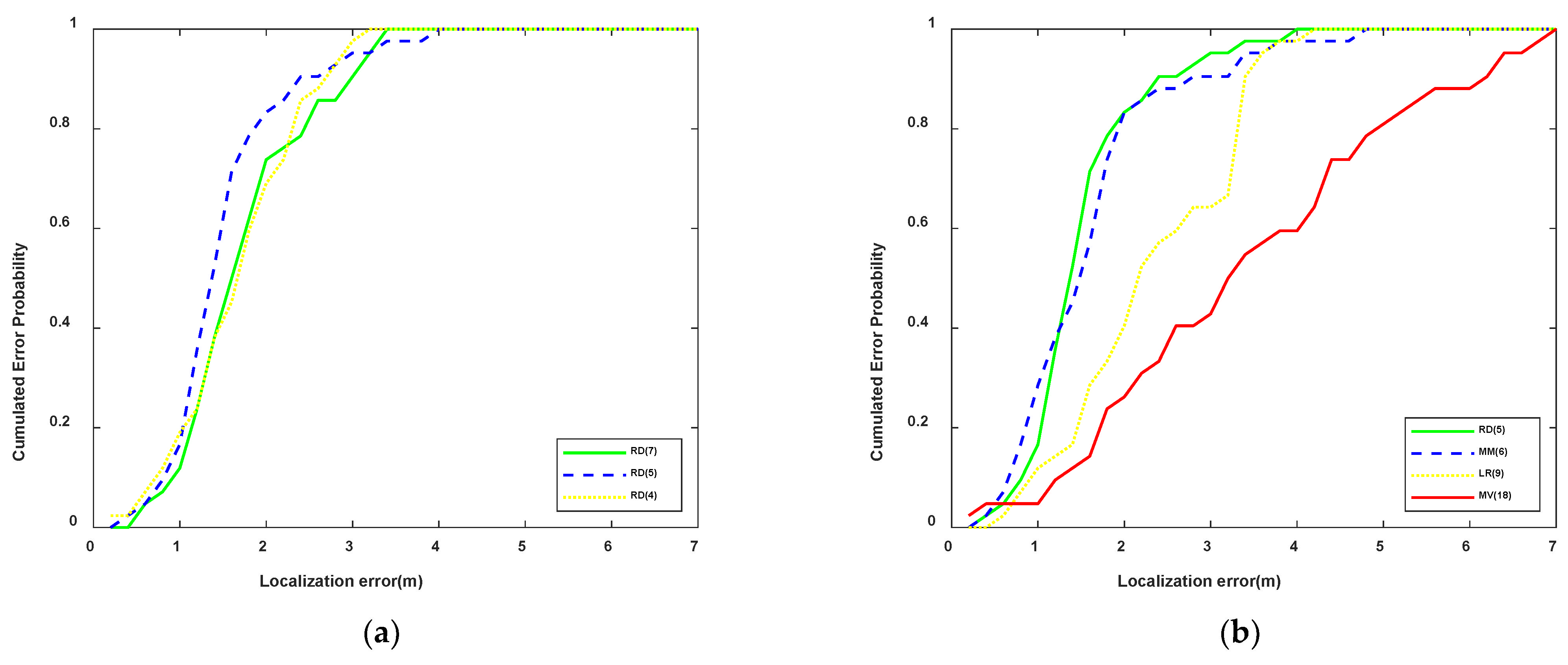
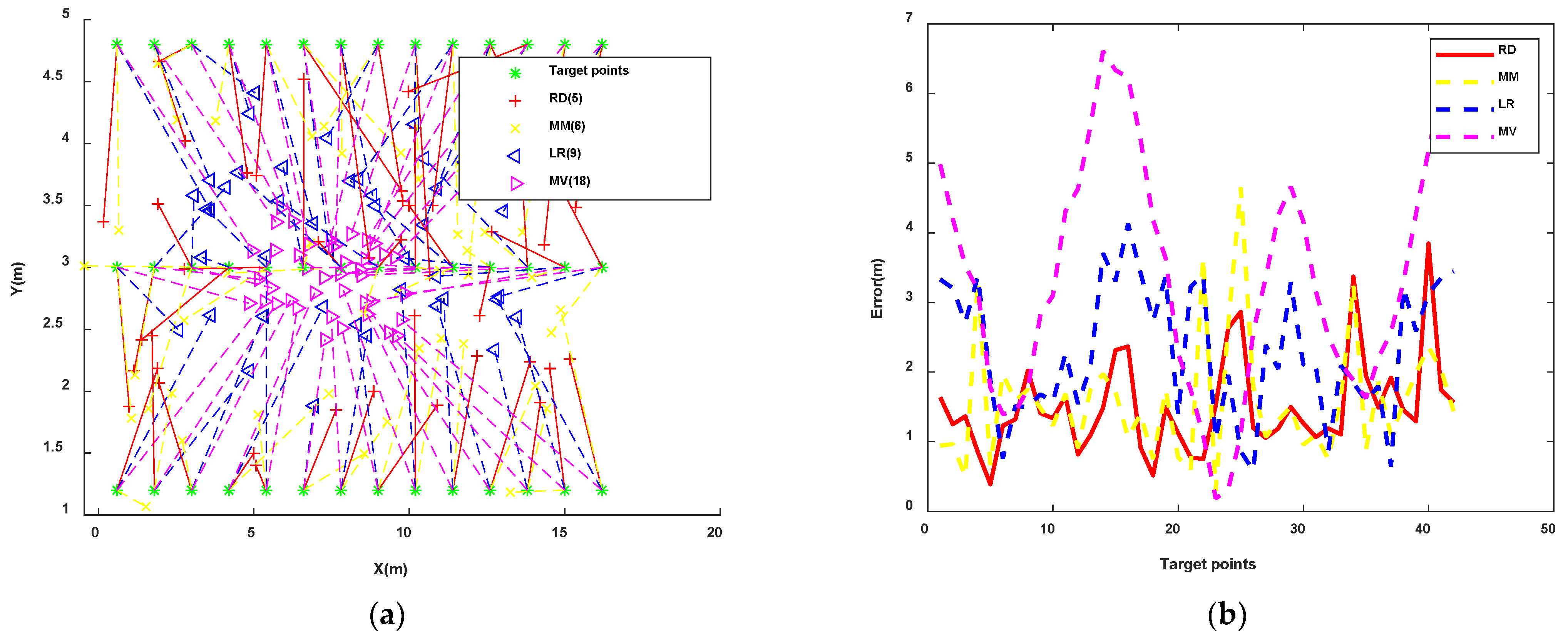
- Max Mean RSSI (MM): Beacons selection based on the mean maximum RSSI over a period of time.
- (B)
- Loss Rate (LR): The basic idea of the LR method is that we should choose the Beacons with the lowest RSSI loss rate within a period of time. It can be calculated by Beacon transmit frequency and acquisition time. It can be expressed as Equation (11):where, represents the th Beacon, represents the maximum number of RSSIs that can be received during this period, and represents the actual number of RSSIs received by this Beacon.
- (C)
- Minimum Variance (MV): Use the collected RSSI variance as the basis for selecting Beacons.
3. Experiment and Discussion
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Hegarty, C.J.; Chatre, E. Evolution of the Global Navigation Satellite System (GNSS). Proc. IEEE 2008, 96, 1902–1917. [Google Scholar] [CrossRef]
- Asaad, S.M.; Maghdid, H.S. A Comprehensive Review of Indoor/Outdoor Localization Solutions in IoT era: Research Challenges and Future Perspectives. Comput. Netw. 2022, 212, 109041. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A Meta-Review of Indoor Positioning Systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [PubMed]
- Vanclooster, A.; Van de Weghe, N.; De Maeyer, P. Integrating Indoor and Outdoor Spaces for Pedestrian Navigation Guidance: A Review. Trans. GIS 2016, 20, 491–525. [Google Scholar] [CrossRef]
- Yang, C.C.; Shao, H.R. WiFi-Based Indoor Positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Chen, X.; Li, H.; Zhou, C.Y.; Liu, X.; Wu, D.; Dudek, G. Fidora: Robust WiFi-Based Indoor Localization via Unsupervised Domain Adaptation. IEEE Internet Things J. 2022, 9, 9872–9888. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location Fingerprinting with Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Aranda, F.J.; Parralejo, F.; Alvarez, F.J.; Paredes, J.A. Performance analysis of fingerprinting indoor positioning methods with BLE. Expert Syst. Appl. 2022, 202, 117095. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Li, J.; Shao, Z.P.; Zhang, H. Robust UWB Indoor Localization for NLOS Scenes via Learning Spatial-Temporal Features. IEEE Sens. J. 2022, 22, 7990–8000. [Google Scholar] [CrossRef]
- Rogel, N.; Raphaeli, D.; Bialer, O. Time of Arrival and Angle of Arrival Estimation Algorithm in Dense Multipath. IEEE Trans. Signal Process. 2021, 69, 5907–5919. [Google Scholar] [CrossRef]
- He, J.J.; So, H.C. A Hybrid TDOA-Fingerprinting-Based Localization System for LTE Network. IEEE Sens. J. 2020, 20, 13653–13665. [Google Scholar] [CrossRef]
- Ye, H.Y.; Yang, B.; Long, Z.Q.; Dai, C.H. A Method of Indoor Positioning by Signal Fitting and PDDA Algorithm Using BLE AOA Device. IEEE Sens. J. 2022, 22, 7877–7887. [Google Scholar] [CrossRef]
- Wu, S.X.; Huang, W.X.; Li, M.; Xu, K. A Novel RSSI Fingerprint Positioning Method Based on Virtual AP and Convolutional Neural Network. IEEE Sens. J. 2022, 22, 6898–6909. [Google Scholar] [CrossRef]
- Yang, B.; Guo, L.Y.; Guo, R.J.; Zhao, M.M.; Zhao, T.T. A Novel Trilateration Algorithm for RSSI-Based Indoor Localization. IEEE Sens. J. 2020, 20, 8164–8172. [Google Scholar] [CrossRef]
- Shang, S.; Wang, L.X. Overview of WIFI fingerprinting-based indoor positioning. IET Commun. 2022, 16, 725–733. [Google Scholar] [CrossRef]
- Xue, W.X.; Yu, K.G.; Li, Q.Q.; Zhou, B.D.; Zhu, J.S.; Chen, Y.W.; Qiu, W.N.; Hua, X.H.; Ma, W.; Chen, Z.P. Eight-Diagram Based Access Point Selection Algorithm for Indoor Localization. IEEE Trans. Veh. Technol. 2020, 69, 13196–13205. [Google Scholar] [CrossRef]
- Zhang, W.; Yu, K.G.; Wang, W.X.; Li, X.M. A Self-Adaptive AP Selection Algorithm Based on Multiobjective Optimization for Indoor WiFi Positioning. IEEE Internet Things J. 2021, 8, 1406–1416. [Google Scholar] [CrossRef]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U. WLAN location determination via clustering and probability distributions. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications (Percom 2003), Washington, DC, USA, 23–26 March 2003; pp. 143–150. [Google Scholar] [CrossRef]
- Li, J.H.; Gao, X.X.; Hu, Z.Y.; Wang, H.J.; Cao, T.; Yu, L. Indoor Localization Method Based on Regional Division with IFCM. Electronics 2019, 8, 559. [Google Scholar] [CrossRef]
- Li, C.G.; Huang, H.; Liao, B.W. An Improved Fingerprint Algorithm with Access Point Selection and Reference Point Selection Strategies for Indoor Positioning. J. Navig. 2020, 73, 1182–1201. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Yang, Q.; Yin, J.; Chai, X.Y. Power-efficient access-point selection for indoor location estimation. IEEE Trans. Knowl. Data Eng. 2006, 18, 877–888. [Google Scholar] [CrossRef]
- Laitinen, E.; Lohan, E.S. On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning. Sensors 2016, 16, 737. [Google Scholar] [CrossRef]
- Deng, Z.A.; Ma, L.; Xu, Y.B. Intelligent AP Selection for Indoor Positioning in Wireless Local Area Network. In Proceedings of the 2011 6th International Icst Conference on Communications and Networking in China (Chinacom), Harbin, China, 17–19 August 2011; pp. 257–261. [Google Scholar]
- Cui, X.R.; Wang, M.Y.; Li, J.; Ji, M.Q.; Yang, J.; Liu, J.H.; Huang, T.P.; Chen, H.H. Indoor Wi-Fi Positioning Algorithm Based on Location Fingerprint. Mobile Netw. Appl. 2021, 26, 146–155. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Z.K.; Xia, W.C.; Ni, Y.Y.; Zhao, H.T. Weighted Adaptive KNN Algorithm with Historical Information Fusion for Fingerprint Positioning. IEEE Wirel. Commun. Lett. 2022, 11, 1002–1006. [Google Scholar] [CrossRef]
- Fang, S.H.; Lin, T.N. Principal Component Localization in Indoor WLAN Environments. IEEE. Trans. Mob. Comput. 2012, 11, 100–110. [Google Scholar] [CrossRef]
- Guo, Y.; Zheng, J.Z.; Zhu, W.Z.; Xiang, G.Q.; Di, S.N. iBeacon Indoor Positioning Method Combined with Real-Time Anomaly Rate to Determine Weight Matrix. Sensors 2021, 21, 120. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation-Based Anomaly Detection. Acm Trans. Knowl. Discov. Data 2012, 6, 1–39. [Google Scholar] [CrossRef]
- Li, X.R. RSS-based location estimation with unknown pathloss model. IEEE Trans. Wirel. Commun. 2006, 5, 3626–3633. [Google Scholar] [CrossRef]
- Gratton, S.; Lawless, A.S.; Nichols, N.K. Approximate Gauss-Newton methods for nonlinear least squares problems. SIAM J. Optim. 2007, 18, 106–132. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
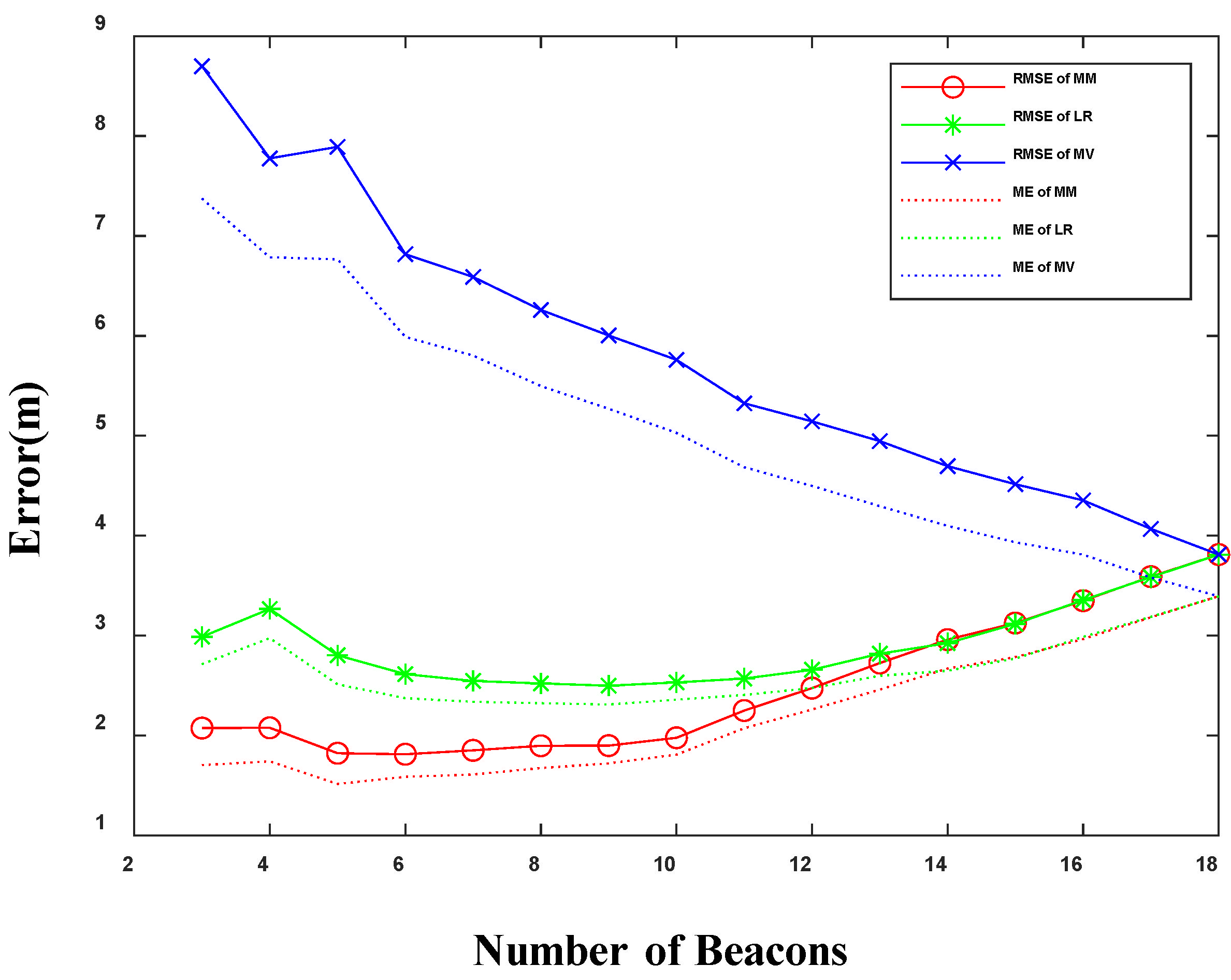
| Errors (m) | 3Beacons | 4Beacons | 5Beacons | 6Beacons | 7Beacons | 8Beacons | 9Beacons | 10Beacons |
| RMSE (MM) | 2.07 | 2.08 | 1.82 | 1.81 | 1.85 | 1.90 | 1.90 | 1.98 |
| RMSE (LR) | 2.99 | 3.27 | 2.80 | 2.61 | 2.55 | 2.52 | 2.50 | 2.53 |
| RMSE (MV) | 8.70 | 7.78 | 7.89 | 6.82 | 6.59 | 6.26 | 6.00 | 5.76 |
| ME (MM) | 1.70 | 1.74 | 1.51 | 1.59 | 1.61 | 1.67 | 1.72 | 1.81 |
| ME (LR) | 2.71 | 2.97 | 2.51 | 2.37 | 2.34 | 2.32 | 2.31 | 2.36 |
| ME (MV) | 7.37 | 6.79 | 6.77 | 5.99 | 5.80 | 5.50 | 5.27 | 5.03 |
| Errors (m) | 11Beacons | 12Beacons | 13Beacons | 14Beacons | 15Beacons | 16Beacons | 17Beacons | 18Beacons |
| RMSE (MM) | 2.25 | 2.47 | 2.72 | 2.96 | 3.13 | 3.35 | 3.59 | 3.81 |
| RMSE (LR) | 2.57 | 2.66 | 2.82 | 2.92 | 3.12 | 3.35 | 3.59 | 3.81 |
| RMSE (MV) | 5.32 | 5.14 | 4.95 | 4.70 | 4.51 | 4.35 | 4.07 | 3.81 |
| ME (MM) | 2.07 | 2.26 | 2.46 | 2.67 | 2.78 | 2.96 | 3.18 | 3.39 |
| ME (LR) | 2.41 | 2.47 | 2.60 | 2.65 | 2.77 | 2.99 | 3.19 | 3.39 |
| ME (MV) | 4.68 | 4.50 | 4.29 | 4.10 | 3.93 | 3.81 | 3.58 | 3.39 |
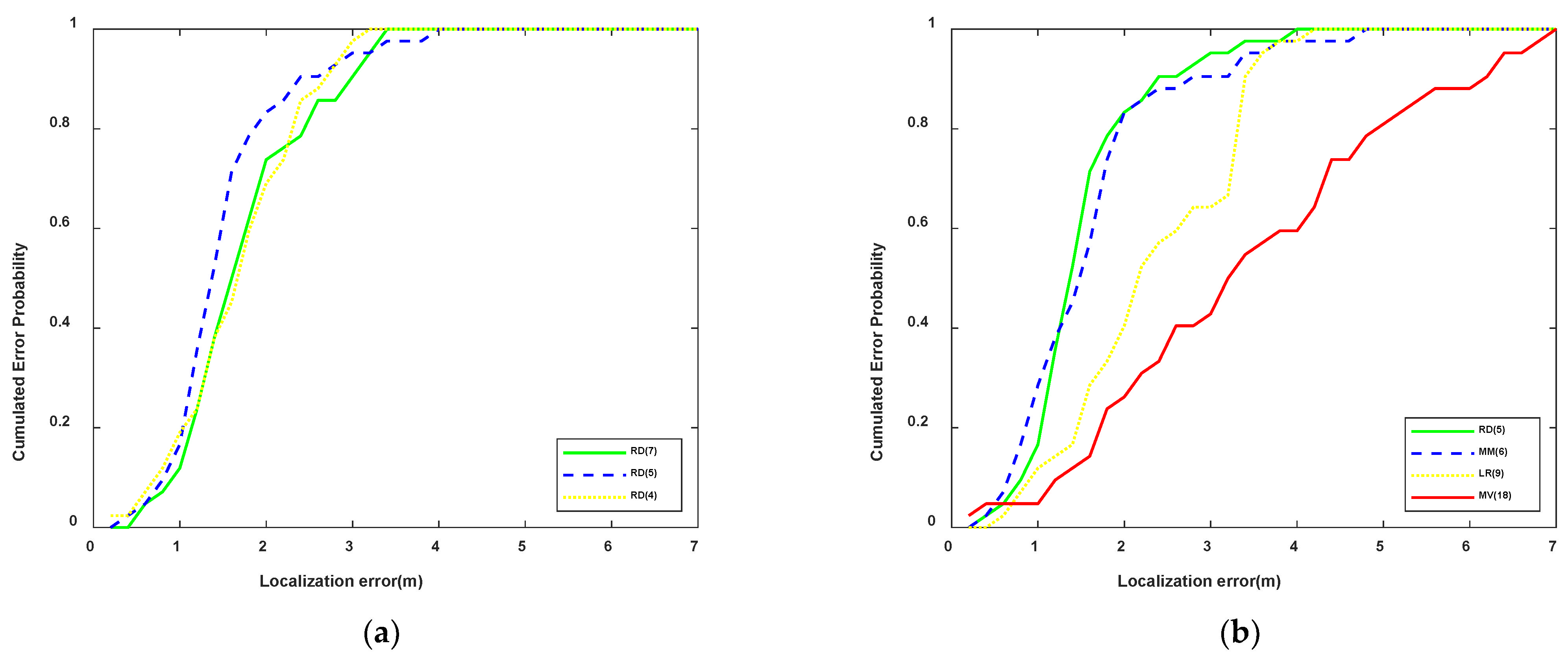
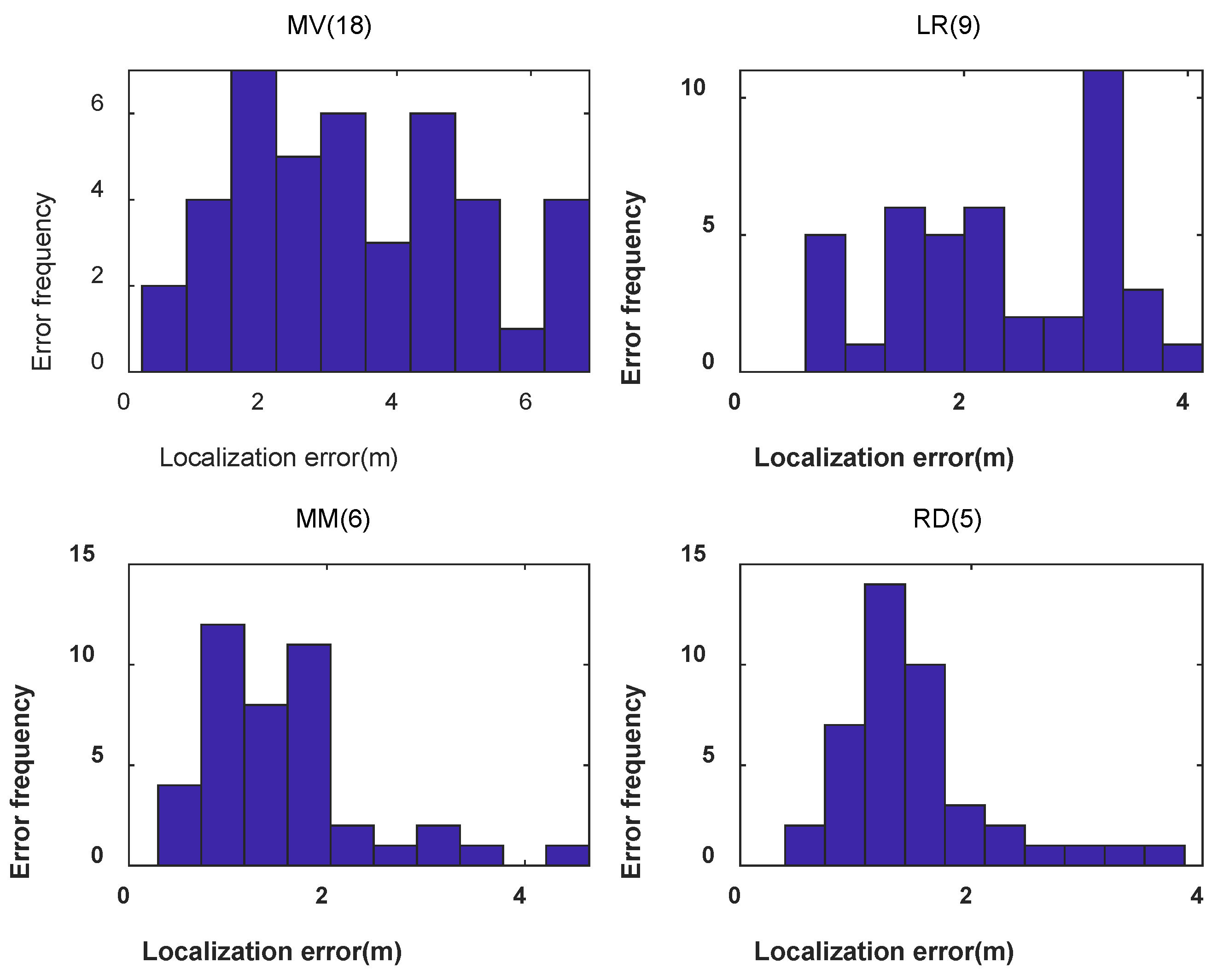
| Errors (m) | RMSE | ME |
|---|---|---|
| MM (Beacons = 6) | 1.81 | 1.59 |
| LR (Beacons = 9) | 2.50 | 2.31 |
| MV (Beacons = 18) | 3.81 | 3.39 |
| RD (Beacons = 7 (60%, 60%)) | 1.88 | 1.73 |
| RD (Beacons = 5 (50%, 50%)) | 1.66 | 1.51 |
| RD (Beacons = 4 (40%, 40%)) | 1.82 | 1.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zheng, J.; Di, S.; Xiang, G.; Guo, F. A Beacons Selection Method under Random Interference for Indoor Positioning. Remote Sens. 2022, 14, 4323. https://doi.org/10.3390/rs14174323
Guo Y, Zheng J, Di S, Xiang G, Guo F. A Beacons Selection Method under Random Interference for Indoor Positioning. Remote Sensing. 2022; 14(17):4323. https://doi.org/10.3390/rs14174323
Chicago/Turabian StyleGuo, Yu, Jiazhu Zheng, Shaoning Di, Guiqiu Xiang, and Fei Guo. 2022. "A Beacons Selection Method under Random Interference for Indoor Positioning" Remote Sensing 14, no. 17: 4323. https://doi.org/10.3390/rs14174323
APA StyleGuo, Y., Zheng, J., Di, S., Xiang, G., & Guo, F. (2022). A Beacons Selection Method under Random Interference for Indoor Positioning. Remote Sensing, 14(17), 4323. https://doi.org/10.3390/rs14174323