1. Introduction
As an important part of the earth’s space environment, the ionosphere can reflect, refract, scatter, and absorb electromagnetic waves. Therefore, the investigation of the ionosphere is of far-reaching significance to space weather and high-frequency radio communications. As is well known, ground-based ionospheric OIS is one of the main ways of sounding the ionosphere, with the advantages of large detecting range, easy networking, and good practicability. It has always been an interesting topic in ionospheric sounding [
1,
2,
3,
4]. It should be of great significance to improve the quality and range resolution of OIS ionograms to observe the ionosphere more accurately and finely, such as the internal fine structure of different sporadic E-layers (Es) and the spread F-layers [
5,
6,
7,
8].
At present, the methods of improving the quality and range resolution of OIS ionograms can be mainly divided into two categories. (1) Hardware equipment-based, for instance, improving the transmitting power to suppress interference and noise better, as well as increasing the signal bandwidth of the system to improve the range resolution [
9,
10,
11]. However, this means that higher requirements of the hardware and cost will be put forward. At the same time, the larger bandwidth often leads to a poorer sensitivity. It is clearly not particularly suitable for the existing hardware system designed in this paper. (2) Software- and algorithm-based, such as the wavelet image processing method [
12], wavelet objective projection filter method [
13,
14], autoregressive interpolation method [
15], and so on. However, due to the large spatial scale, the time-varying spatial distribution, and the internal relative movement of the ionosphere and the resulting complexity, imaging algorithms to improve the range resolution of the OIS ionograms have not been widely considered and applied. In this paper, the Capon HRRP algorithm, which is often used for the detection of aircraft, ships, buildings, and other hard targets [
16,
17,
18,
19,
20], is first applied to OIS ionogram imaging. Then, the ESB adaptive beamforming technology is also combined to process the OIS signals and reconstruct the ionograms. The implementation process is mainly divided into two steps. First, after the I/Q data of multiple channels is collected by the Wuhan Multi-channel Ionospheric Sounding System (WMISS) [
21,
22], the ESB adaptive beamforming algorithm is used to synthesize the data of multiple channels, gather the signal energy of each channel and suppress interference and noise. Then, considering that the ionosphere is a soft target that moves slowly, the Capon HRRP algorithm [
23,
24] is used to improve its range resolution. The experimental results show that the quality of the OIS ionogram is significantly improved. In particular, using the Capon HRRP algorithm, the range resolution is improved, so the fine structure and spatiotemporal changes inside the ionosphere can be observed more precisely. This means that the traditional signal processing technology of OIS still has great room for improvement and application value, which will also be of great significance to the high-precision spatiotemporal observation of the ionosphere in the future.
This paper is roughly divided into seven parts:
Section 1. Introduction, which mainly introduces the research background and briefly describes the outline of the problem and our solution;
Section 2. WMISS description and introduction;
Section 3. Method and data processing flow, in which the. methods of solving the problem and whole data processing flow are described in general;
Section 4. ESB algorithm, which describes the principle of ESB adaptive beamforming algorithm;
Section 5. High-resolution principle of range profile, which mainly introduces the principle of Capon HRRP algorithm and how to use it in our scheme;
Section 6. Results and discussion;
Section 7. Conclusions.
2. WMISS Description and Introduction
The original baseband data of OIS comes from WMISS, which is a multifunctional sounding system for the ionosphere. WMISS is mainly composed of three modules: the transmitting module, the receiving module, and the time-frequency synchronization module. The transmitting module is mainly responsible for the transmission of the signal, and the transmitted signal is modulated by pseudo-random two-phase coding. For the OIS of ionosphere, a 16-bit completely complementary code (CCC) is used as the modulation form of the transmitted signal, to make full use of the excellent correlation characteristics of CCC and obtain high gain [
21]. The width
tp of each code chip is 25.6 μs, which means that the bandwidth of the transmitted signal is 39.0625 kHz. The transmitting antenna is an inverted V antenna with a frame height of about 8 m, and the transmitting peak power is 200 W.
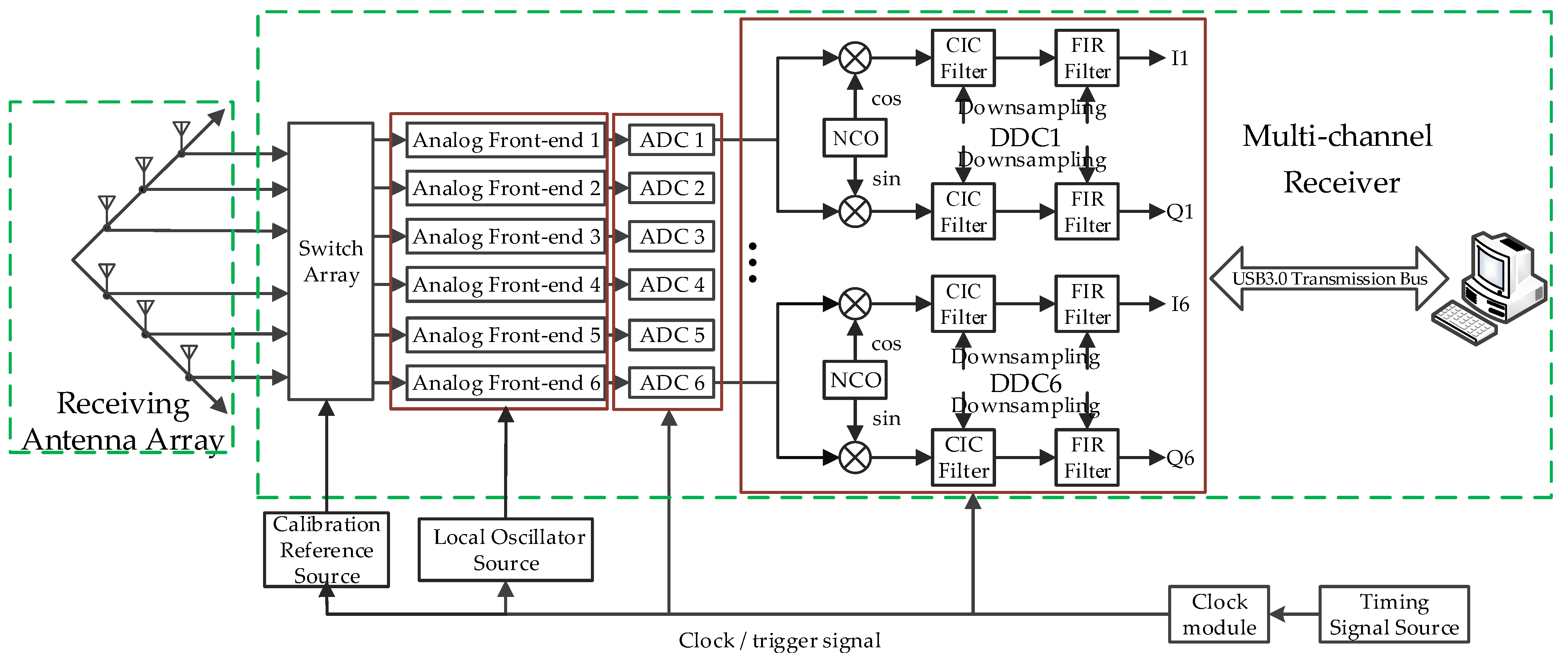
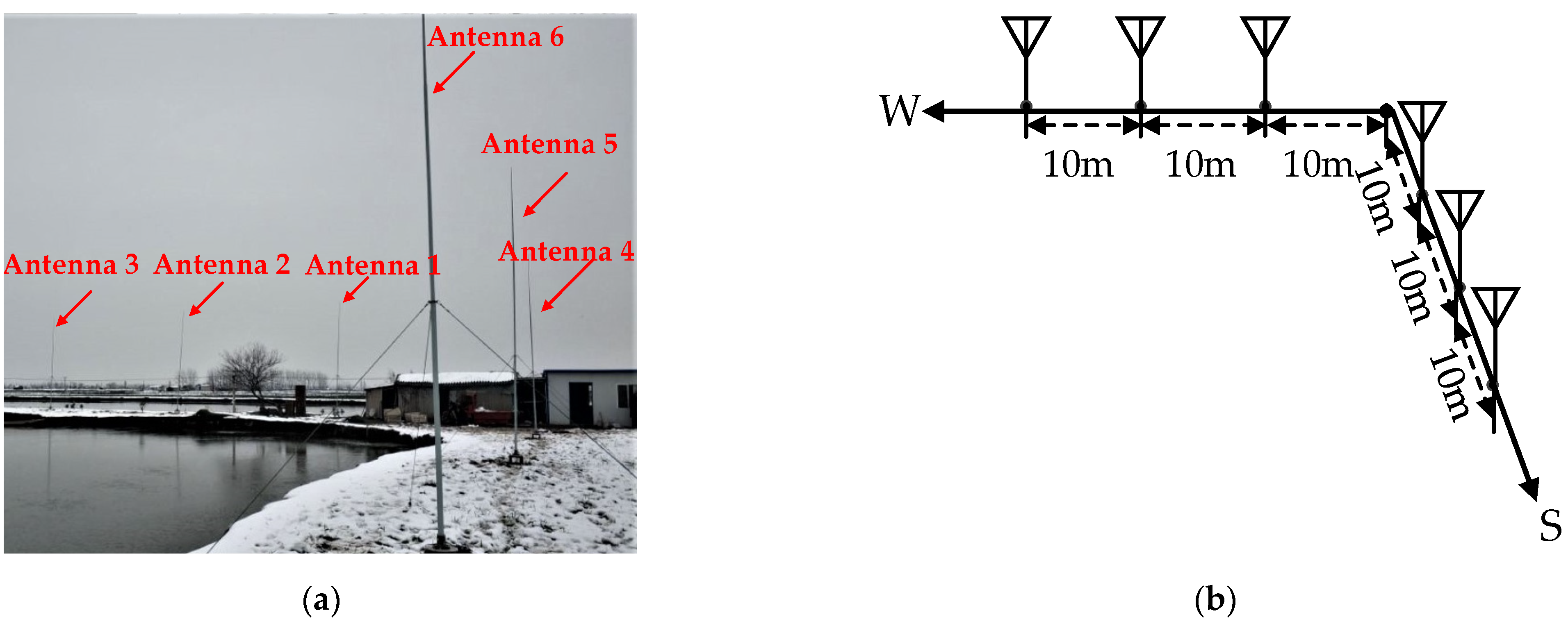
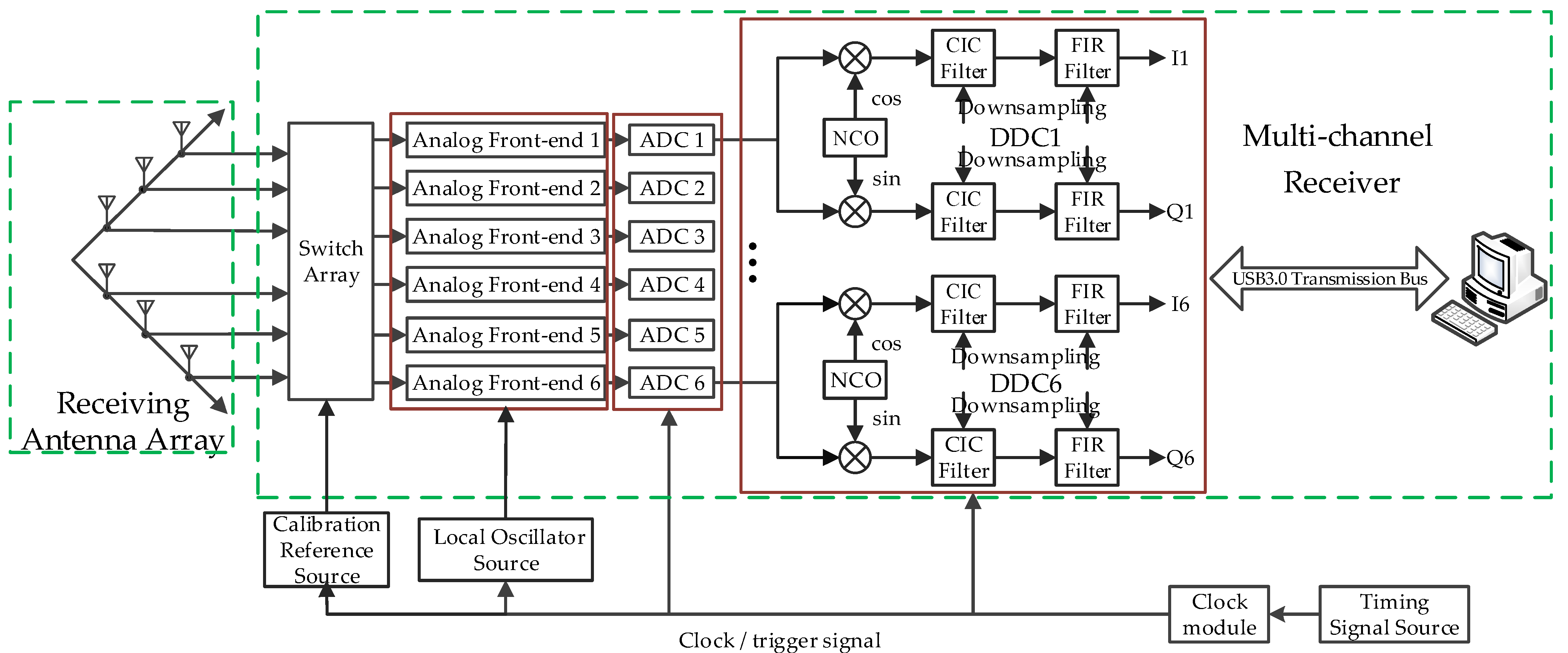
The receiving module is the core of the WMISS system, which is mainly composed of a receiving antenna array and a multi-channel receiver. Its structure diagram is shown in
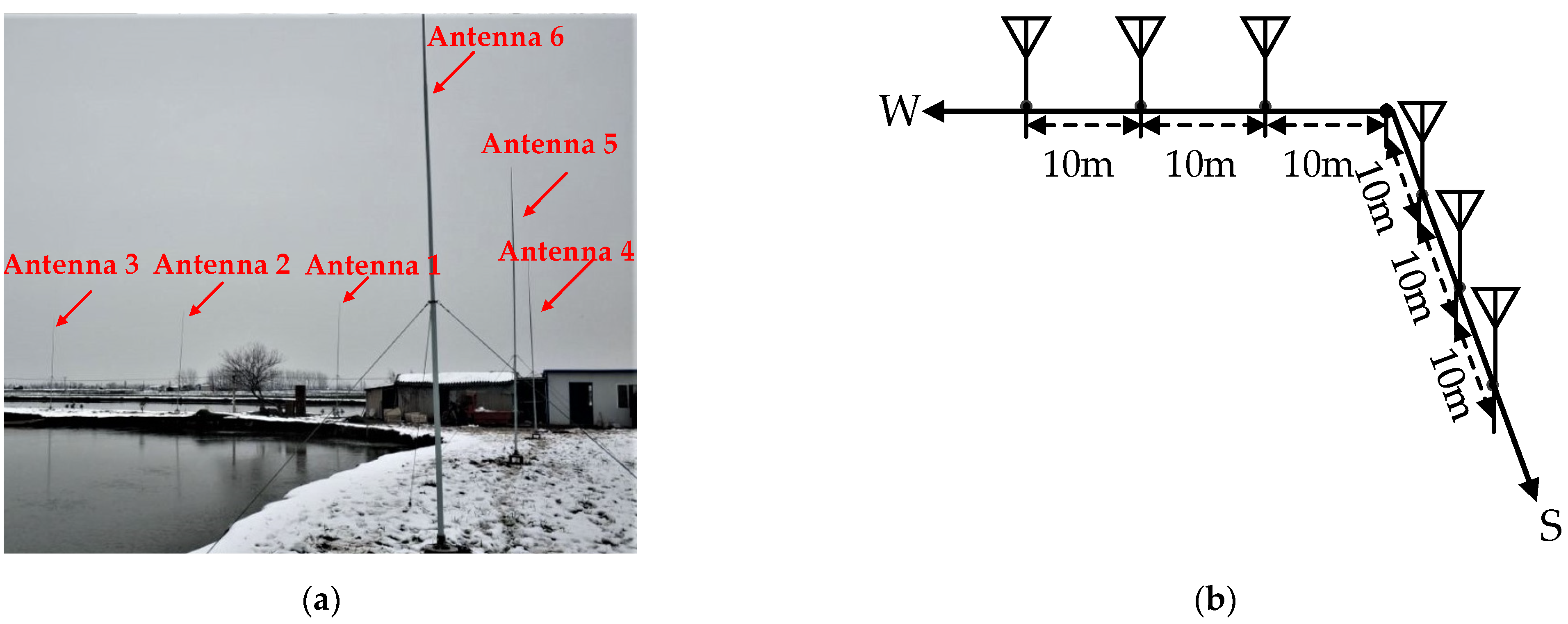
Figure 1. The receiving antenna is a compact “L-shaped” array, composed of 6 monopole antennas with a height of 6 m. The distance between adjacent antennas is 10 m, the actual scene and layout of the site of the “L-shape” array is shown in
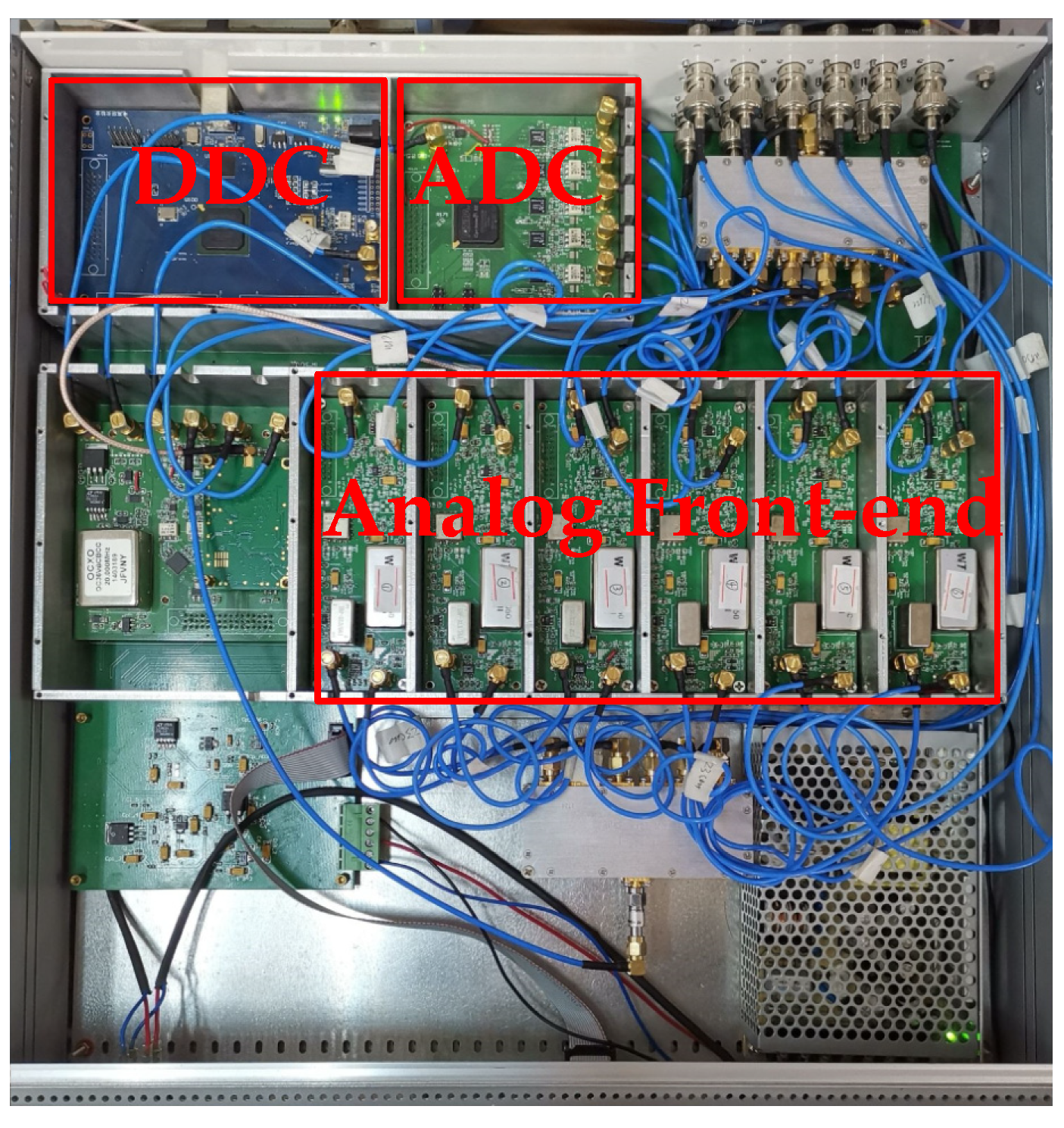
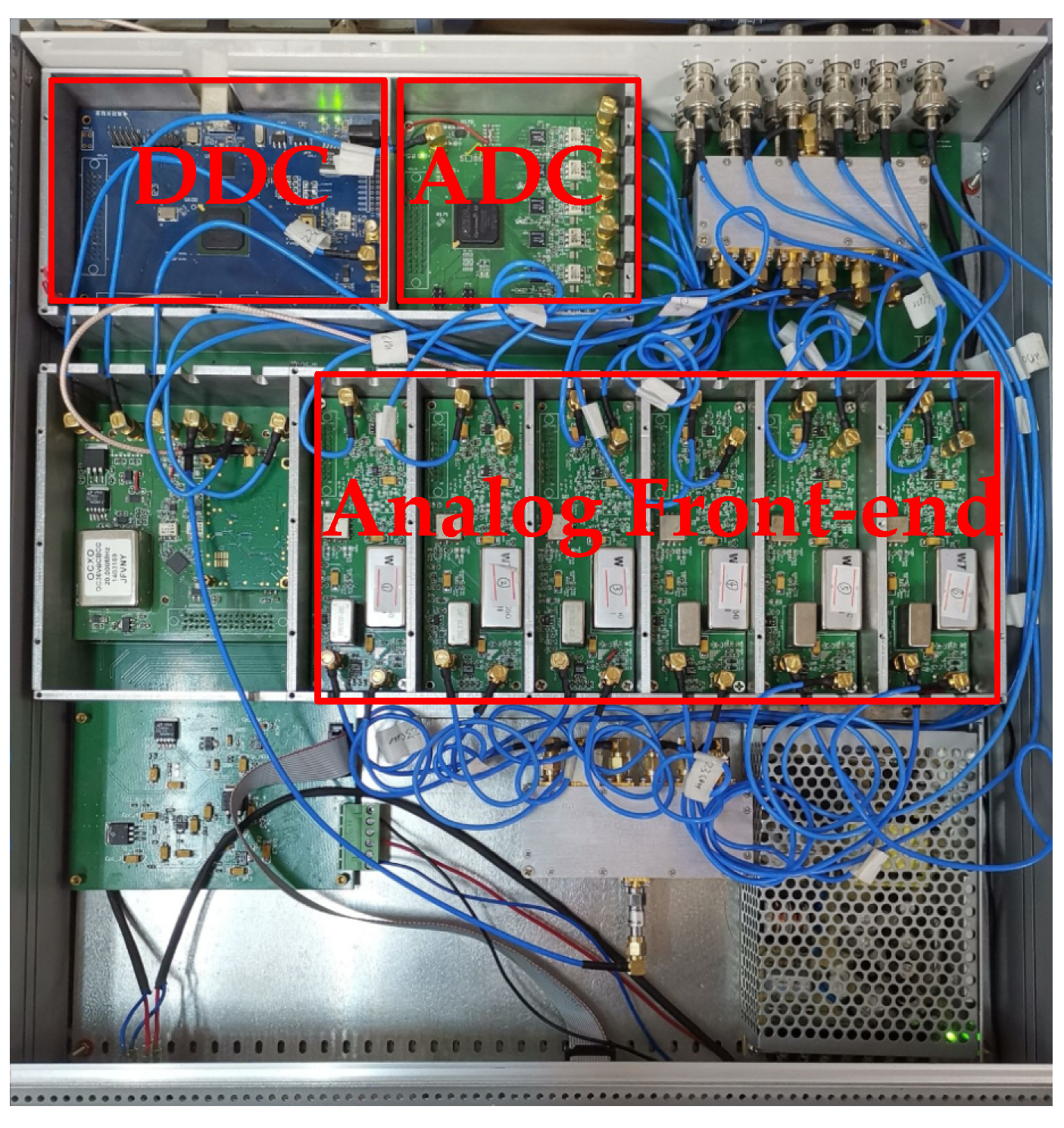
Figure 2. The received signal of each channel is mixed after preselection filtering to obtain an intermediate frequency signal, which is amplified to an appropriate magnitude after narrowband filtering in the analog front-ends, respectively. Then, it is sampled with high-performance analog/digital (A/D) converters, and the resulting signal is digitally mixed with a quadrature signal generated by a Numerically Controlled Oscillator (NCO), and then filtered by cascaded integrator–comb (CIC) filter and finite impulse response (FIR) filter. The baseband I/Q data stream can be obtained after filtering and decimation. Finally, the baseband I/Q data are uploaded through the USB3.0 transmission bus, and the next step of correlation operation and pulse compression processing is conducted. The signal processing part of the indoor equipment of the receiving module is shown in
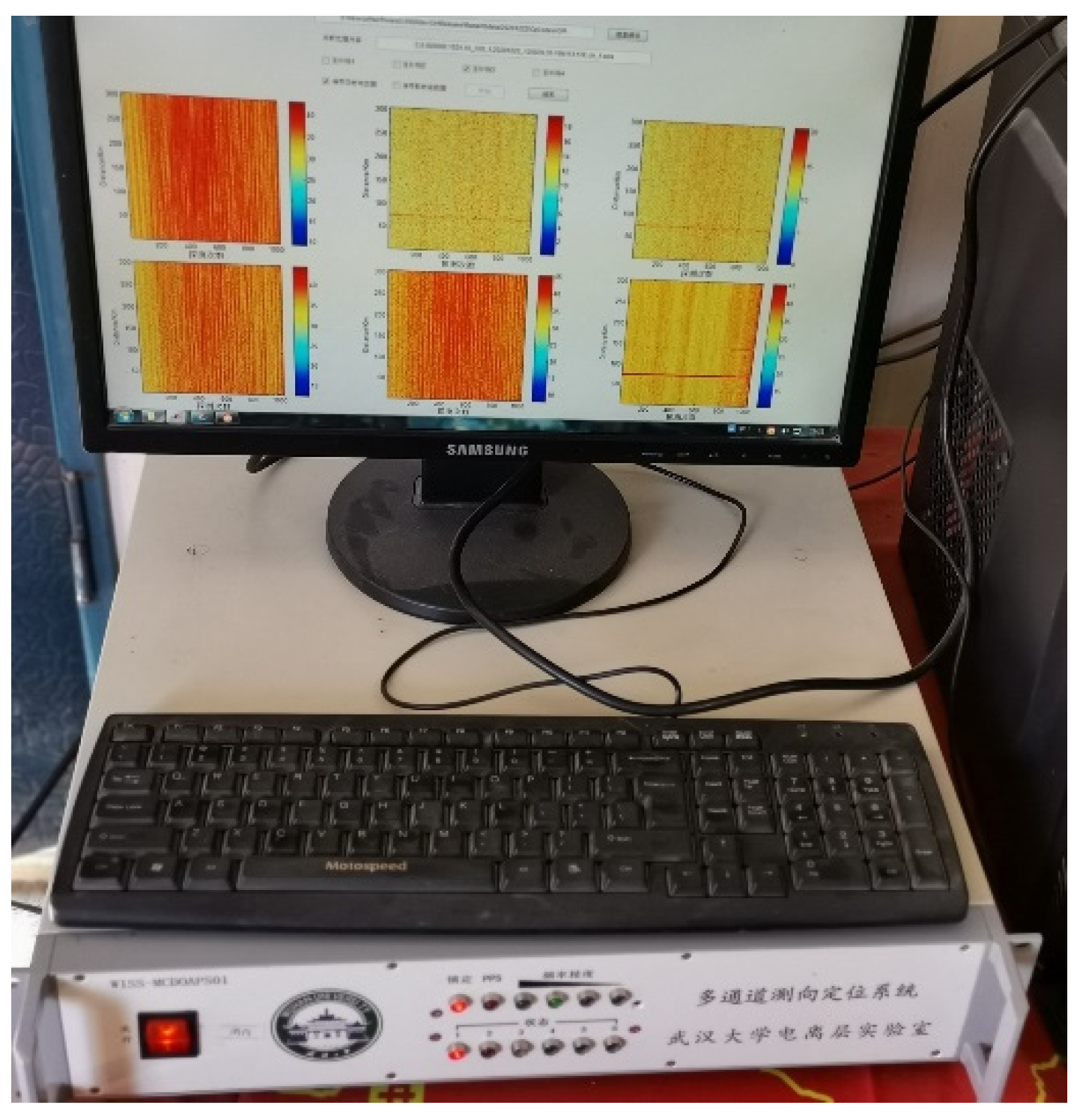
Figure 3. Each hardware submodule is independently encapsulated in the aluminum alloy frame, which is conducive to electromagnetic shielding between components. In the multi-channel analog front-end, each analog channel is arranged in parallel, and the adjacent channels are also isolated by an aluminum alloy frame to prevent the mutual crosstalk of electromagnetic signals. Moreover, after the local oscillator source of WMISS is sampled by A/D, it is mixed with the received signal of each channel after a one-to-six power divider (WMISS has six independent channels) to ensure the consistency of the local oscillator source of each channel. At the same time, the connection and internal wiring of each analog channel in the six channels of WMISS use equal-length wires. Finally, in order to ensure that the six channels are phase-coherent, a calibration reference source is introduced, and the amplitude and phase difference between the channels are compared and compensated in the subsequent array signal processing in the upper computer. In addition, the control part of the upper computer is shown in
Figure 4, which is mainly responsible for the analysis and storage of data, and downloading instructions and various sounding parameters to the hardware platform of WMISS.
The time–frequency synchronization module provides the operating clock for the entire system and can correct the output frequency of the frequency source in real-time. Furthermore, it ensures the time–frequency synchronization between the transceiver stations.
The main parameters of WMISS are shown in
Table 1 below.
3. Method and Data Processing Flow
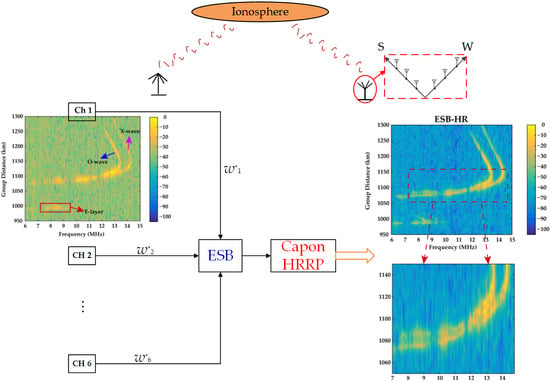
For the scheme designed in this paper, it mainly includes two aspects: Firstly, using ESB adaptive beamforming technology to gather the energy of multiple channels of WMISS, and suppress interference and noise. Through ESB beamforming, the SNR of the echo is significantly improved, and the quality of the OIS ionogram is greatly improved. However, limited by the bandwidth of the short-wave transmitted signal, the original range resolution of the transmitted signal is limited, which limits the further precision observation of the fine structure differences and the temporal–spatial evolution process inside the ionosphere. In view of this situation, combined with the large spatial scale and internal relative movement of the ionosphere, it is a soft target moving slowly. Then, Capon HRRP technology is used to improve the range resolution, which is main innovation of this paper.
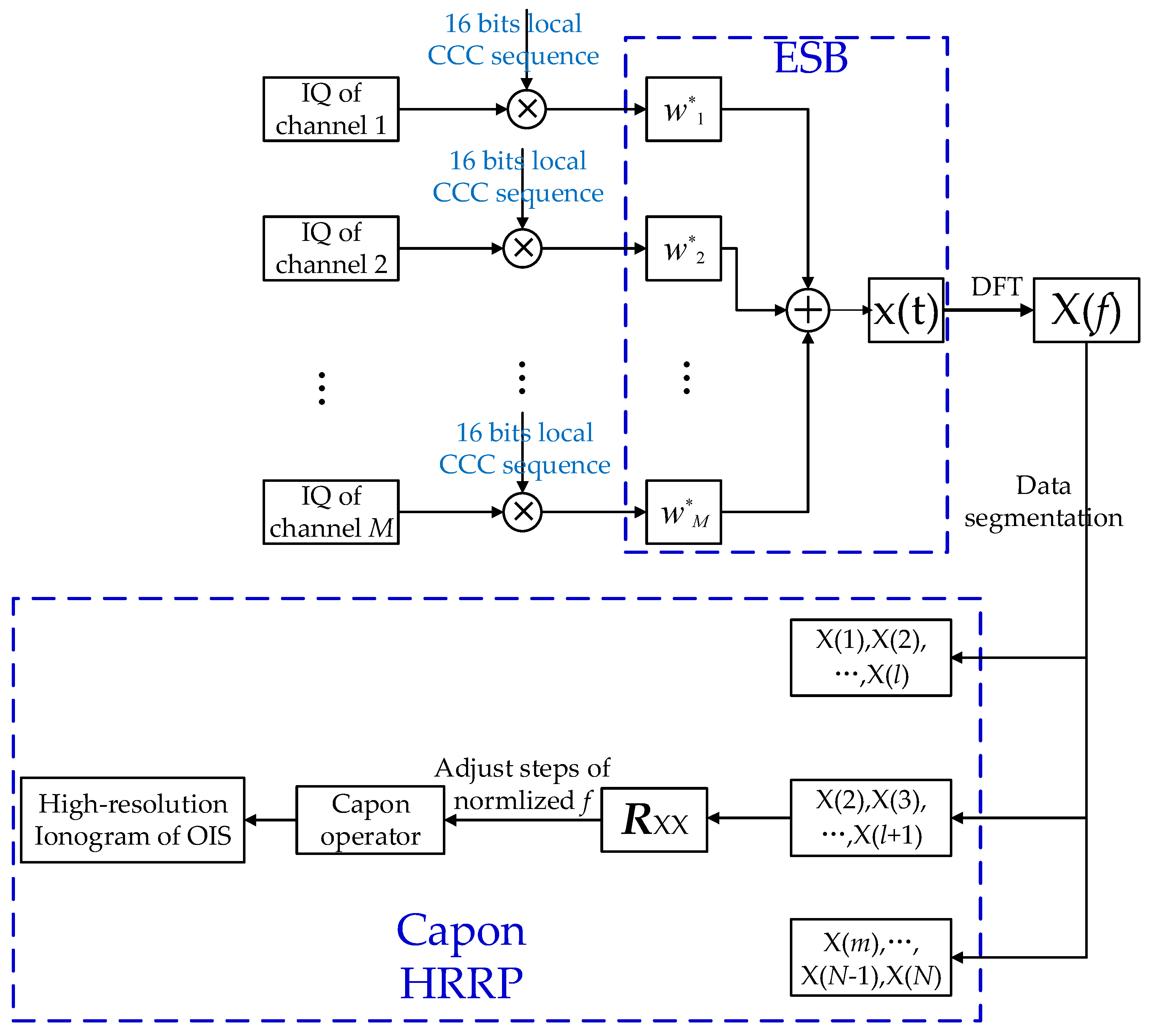
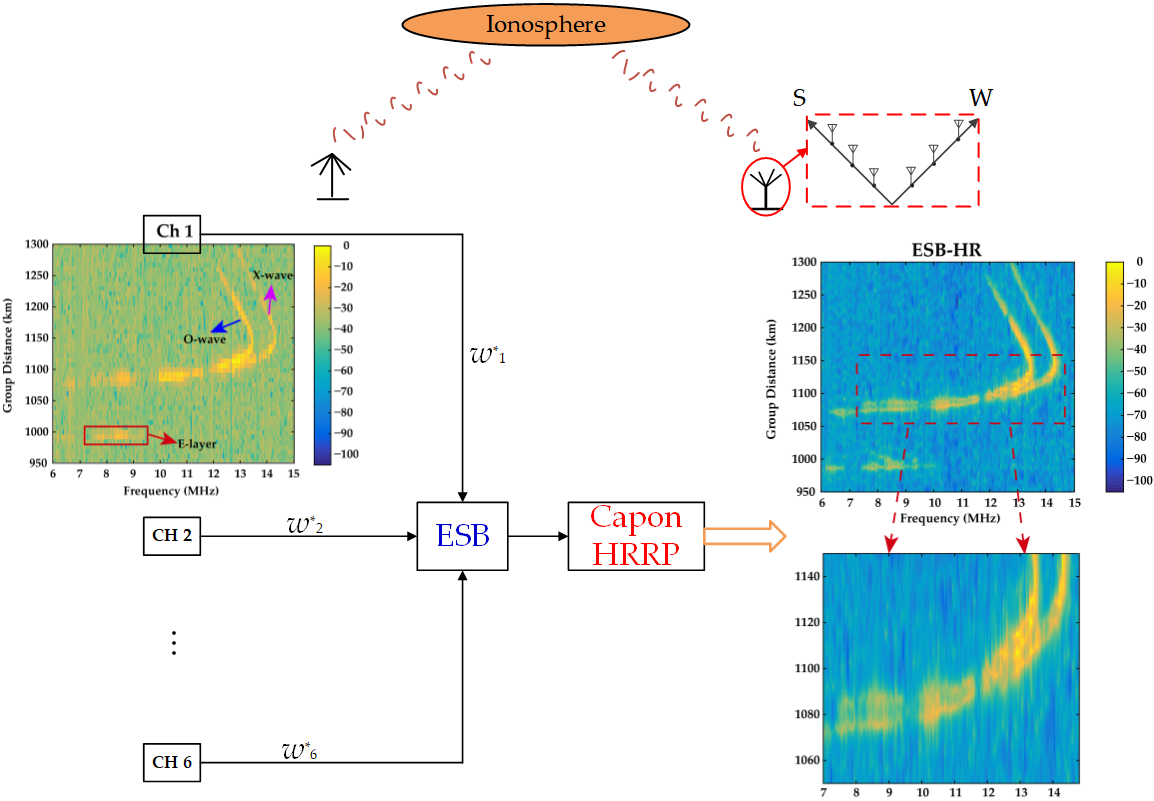
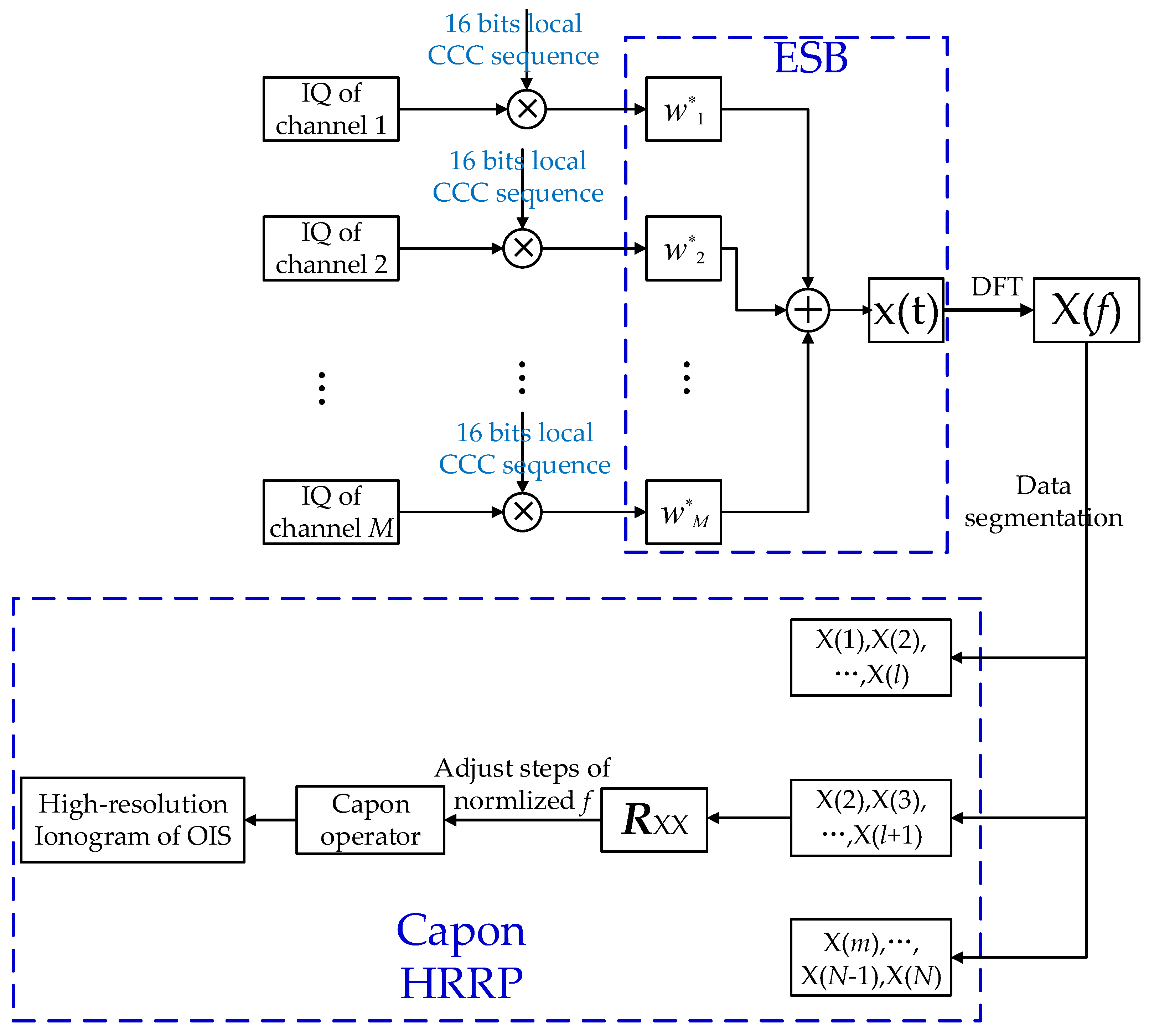
For the scheme proposed in this paper, the general data processing flow is shown in
Figure 5: when the OIS baseband I/Q data of each channel are obtained through the WMISS system, it should be cross-correlated with the corresponding local CCC sequence to obtain the imaging results for every range bin. Then, taking out the data of the same range bin of
M channels, the weighted vector
can be determined by the ESB adaptive beamforming algorithm ((
∙)* denotes conjugate in
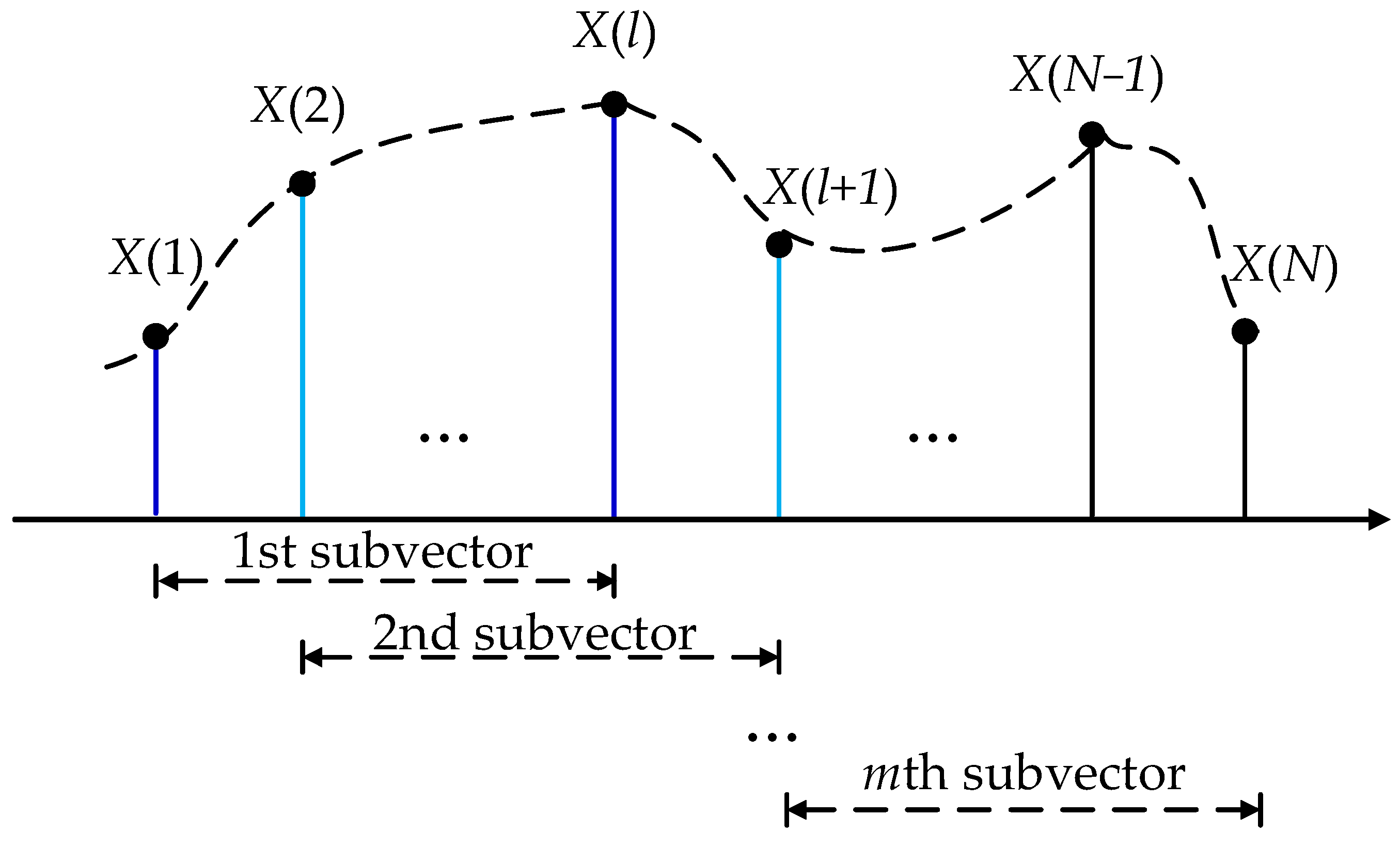
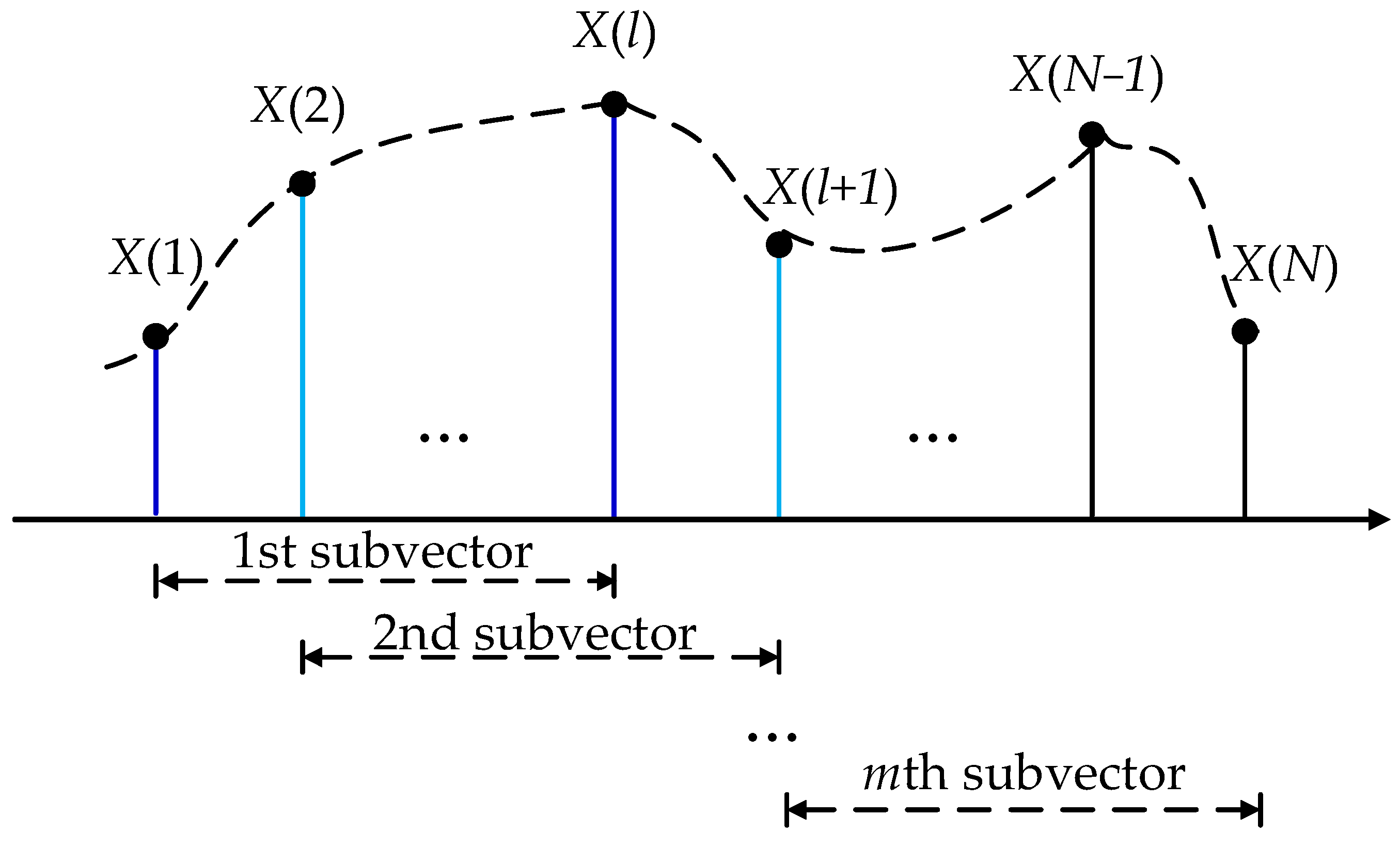
Figure 5). The synthesized signal after weighted summation can be expressed as x(t). Subsequently, discrete Fourier transform (DFT) is performed on the distance dimension of x(t) to obtain the cross energy spectrum X(f). When it is assumed that the echo signal has
N range bins, the length of X(f) is
N. Through segmenting X(f) into m staggered subvectors of length
l, and
m +
l =
N, the covariance matrix
Rxx can be constructed. According to the requirements of range resolution, the scanning step should be adjusted and the corresponding steering vector should be calculated. Finally, through using the Capon HRRP algorithm [
23,
24], the OIS ionogram of the high-resolution range profile can be reconstructed.
The ESB adaptive beamforming technology will be described in the next section, and the Capon HRRP algorithm will be described in detail in
Section 5.
4. ESB Adaptive Beamforming Technology
In this paper, ESB beamformer is used in the first step to synthesize the signals of the array optimally, as its excellent processing ability for OIS signal’s synthesis has been proved in the previous research [
21]. Its principle can be briefly described as follows.
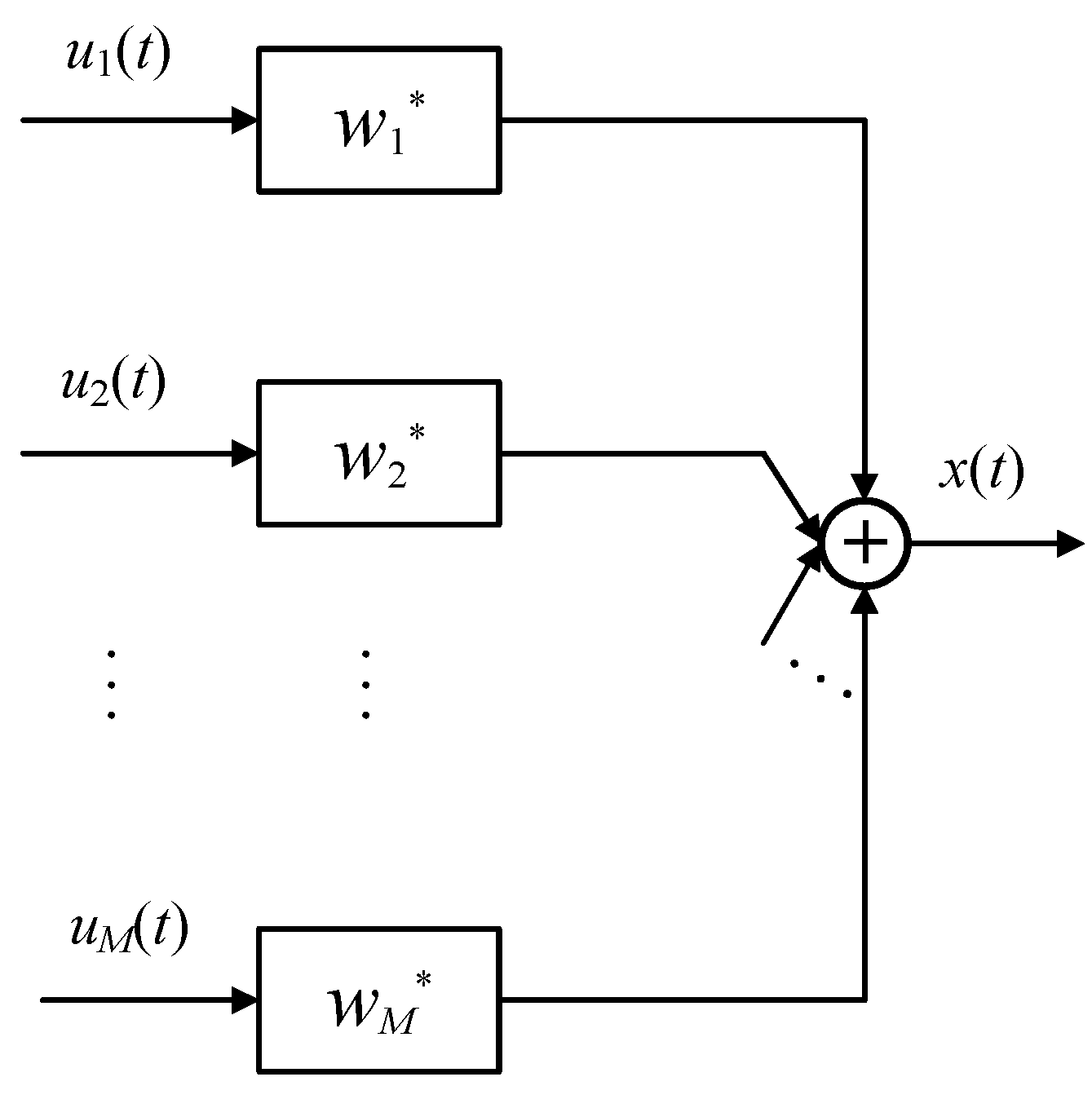
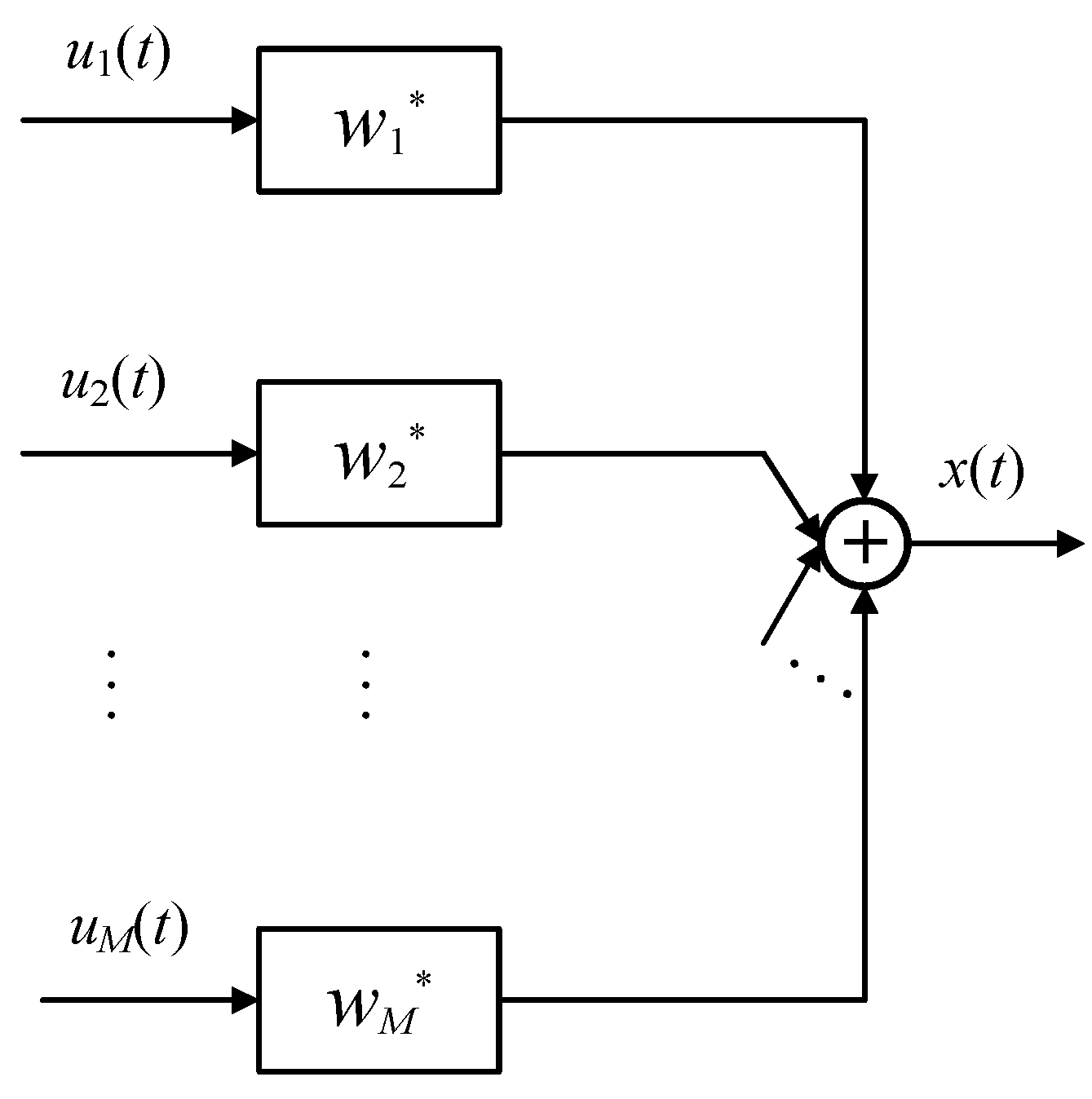
For a general beamformer as shown in
Figure 6, assuming there are
M array elements, the narrowband beamformer can be written in the form of a vector:
where
is called the weighted vector. By weighted summation of
M array elements, the output of the beamformer is:
For the most common sampling matrix inversion (SMI) adaptive beamformer, the question of the optimal
can be described as the following constrained minimization problem:
where
Ri+n represents the covariance matrix of interference plus noise, and
a0 represents the steering vector of the desired signal. In practical application, as the received data often contain the desired signal, interference, and noise at the same time, it is impossible to only estimate the covariance matrix of interference and noise
Ri+n. Under the condition that the desired signal is guaranteed to be output without distortion, minimizing the variance of the interference and noise output by the beam is equivalent to minimizing the variance of the output received echo. Therefore, the covariance matrix of the desired signal + noise + interference is generally used to replace the covariance matrix of interference + noise [
21,
25,
26]. Then, the weighted vector
can be obtained:
Assuming the number of signal sources
p <
M, the eigenvalue decomposition of
Ruu can be obtained:
In Equation (5),
is the corresponding
M eigenvalues, while their corresponding eigenvectors are
ui,
i = 1, 2, …,
M,
λs = diag{
λ1,
λ2, …,
λp},
λn = diag{
λp+1, …,
λM},
Us = [
u1,
u2, …,
up], and
Un = [
up+1,
up+2, …,
uM]. The column vectors of
Us and
Un form a signal subspace and a noise subspace, respectively. The ESB beamforming algorithm discards the component of the weighted vector in the noise subspace and only retains the component of the signal subspace. Thus, the optimal weighted vector can be calculated only based on the eigenspace [
26], that is,
Ideally, the signal subspace and noise subspace are orthogonal. Therefore, compared with
SMI beamformer,
ESB beamformer may have a better suppression effect on the noise. Previous experiments have also proved that the weighted vector obtained by the
ESB algorithm has a good noise and interference suppression effect on the premise of retaining the desired signal’s energy [
21].
6. Results and Discussion
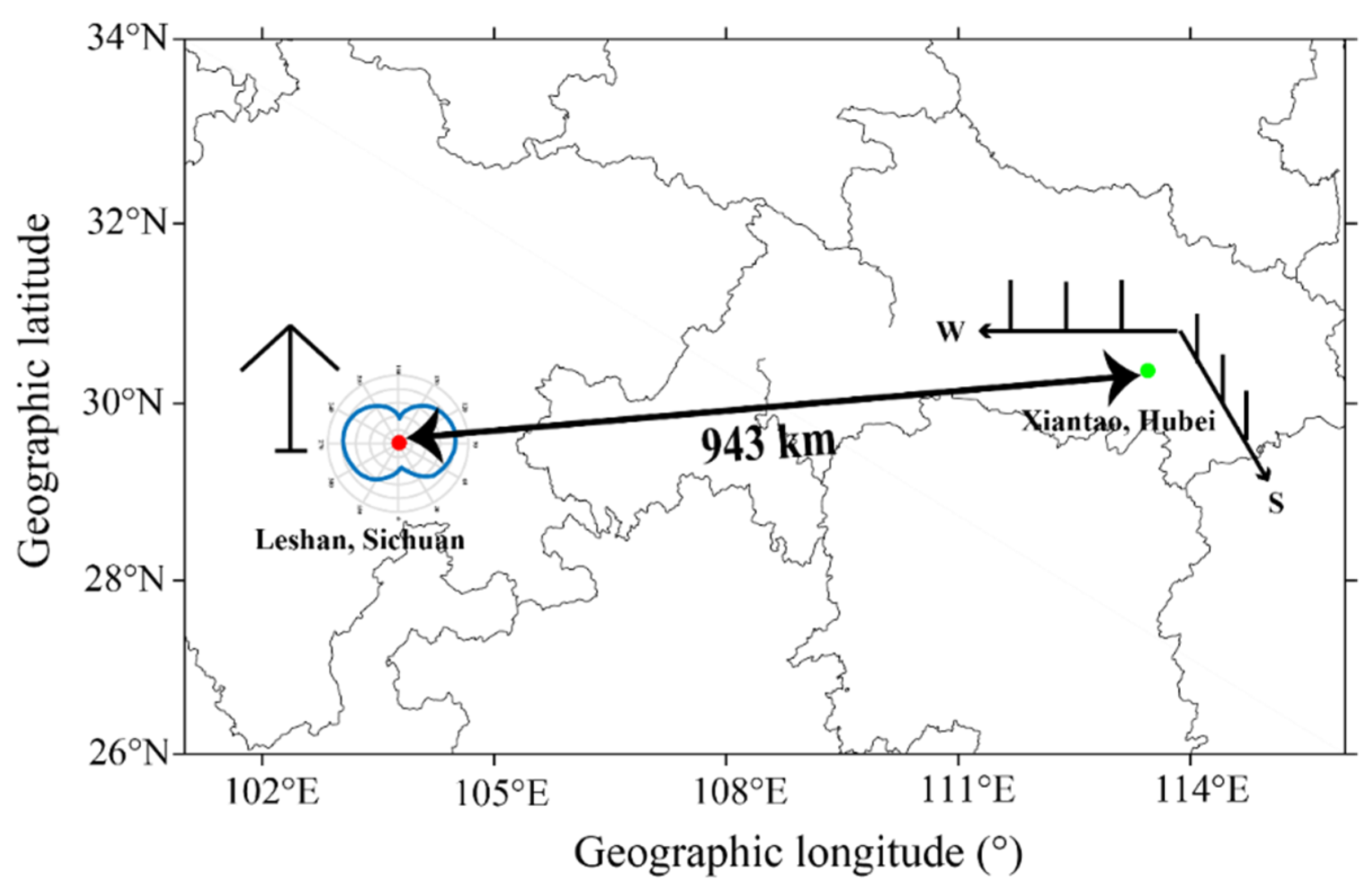
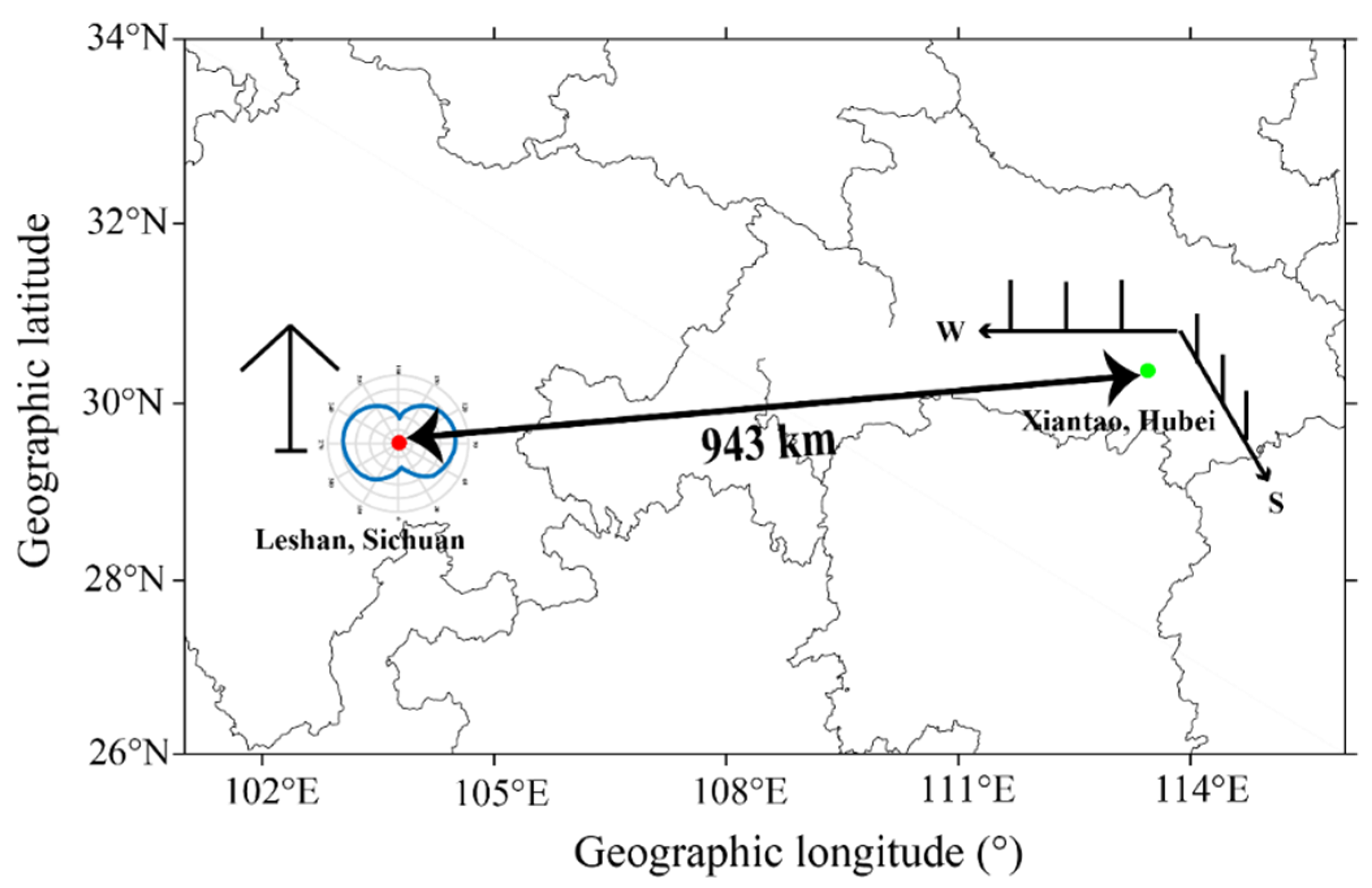
In order to verify the actual effect of the proposed scheme in this paper, the OIS signals used in this paper were transmitted from Leshan station and received by Xiantao multi-channel receiving system. The geographical location diagram of the transceiver station is shown in the
Figure 9. The distance between the transceiver stations is about 943 km.
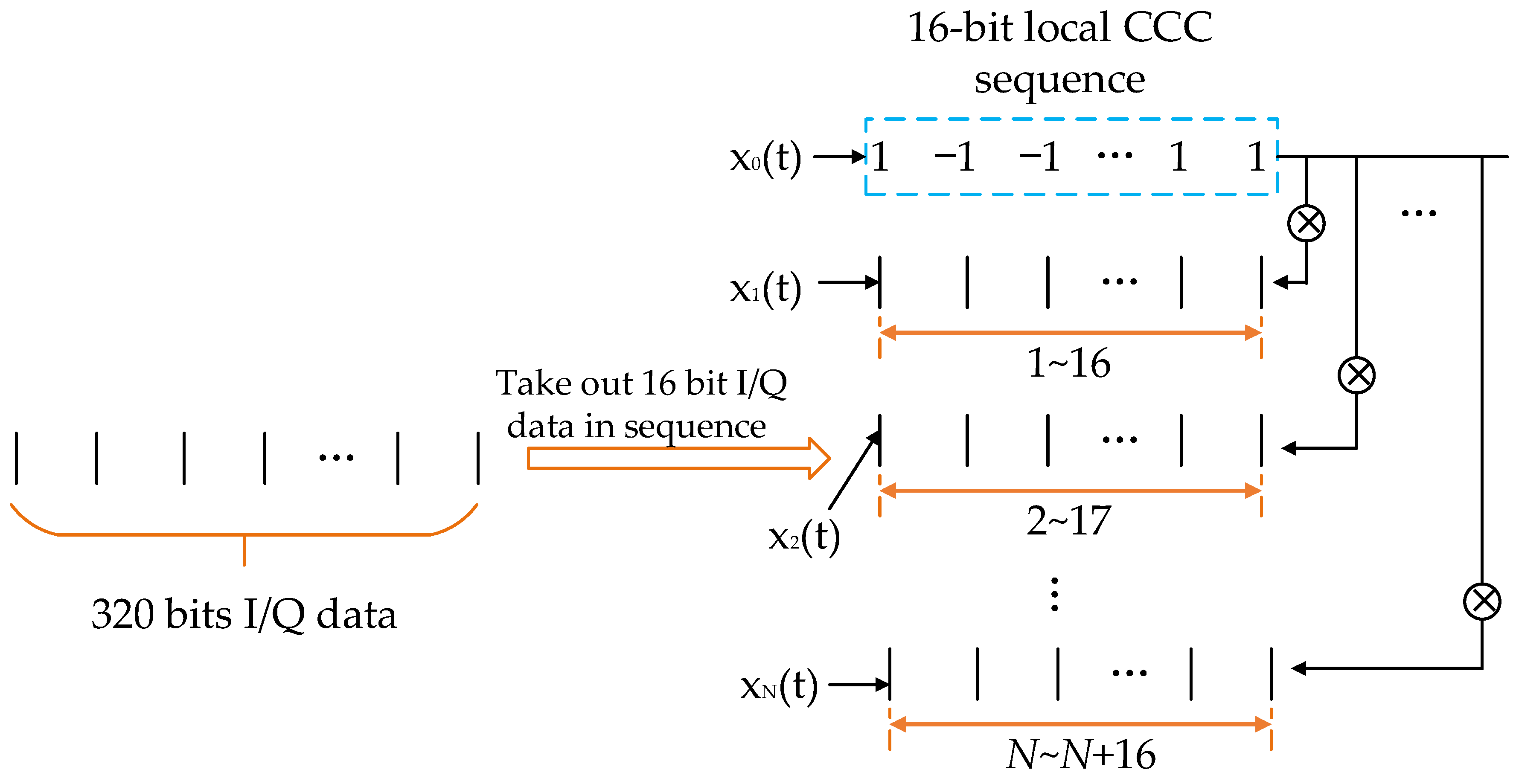
As CCC has excellent correlation characteristic and can obtain high compression gains, the transmitted signal is encoded with a 16-bit CCC sequence [
29,
30] in our experiments. The width
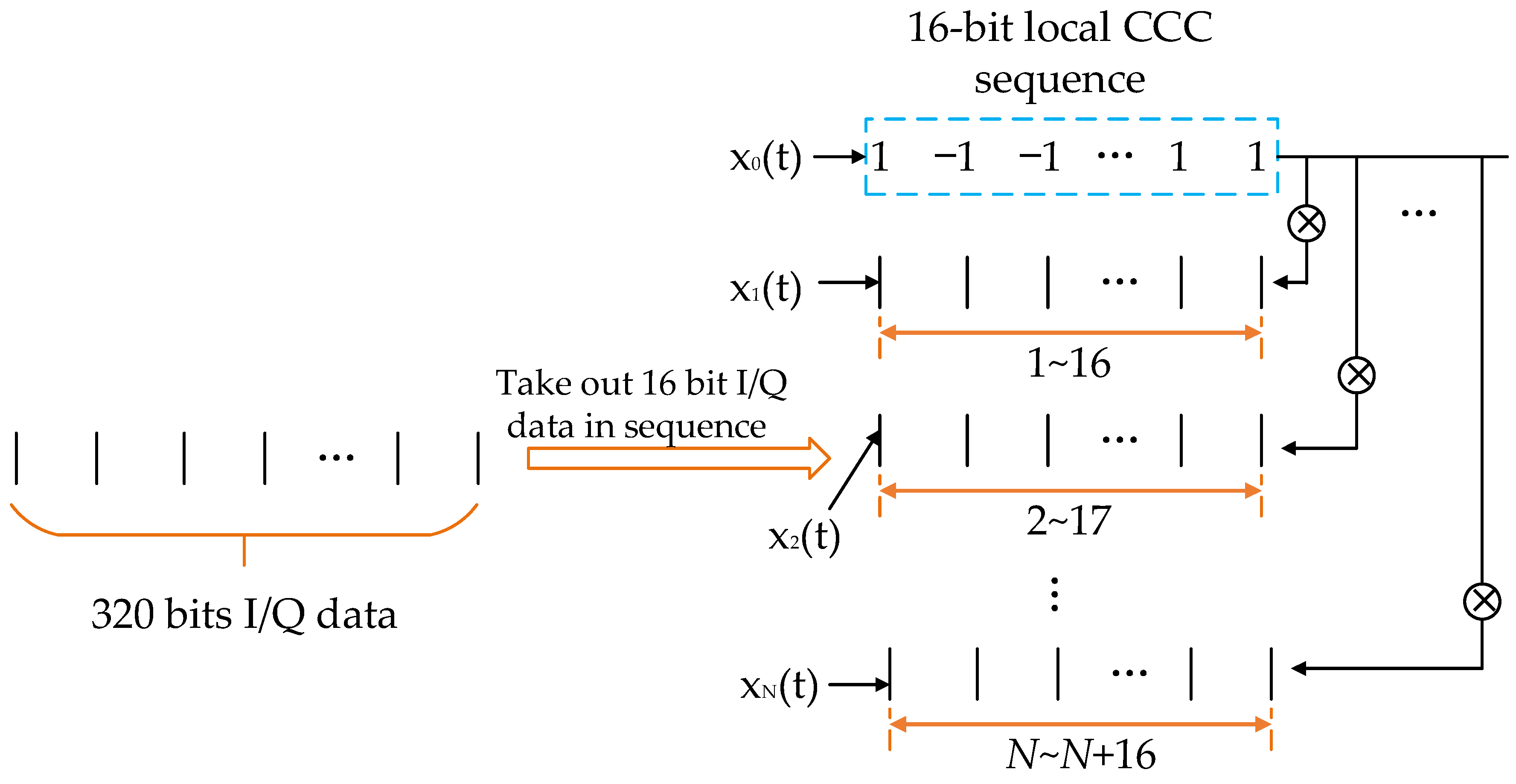
tp of each code chip is 25.6 us, so the original range resolution △R is 7.68 km, which is the size of each range bin.
The duty cycle of the transmitted signal is 5%, and it is modulated with 16-bit CCC, that is, there can be 320 range bins in one detection; namely the maximum value of N is 320.
In the experiment, the scanning step of the range spectrum is 0.768 km, while the resolution is improved by 10 times.
In the process of data segmentation of the cross spectrum X(f) and the reconstruction of the sample covariance matrix, we found that the strength of Capon spectrum is contradictory to the discrimination ability of signal through experiments. The higher the order of the covariance matrix and the smaller the number of snapshots of the segmented data, the weaker the strength of the Capon spectrum, but the stronger the discrimination ability of signal is, and vice versa. Therefore, to obtain a strong signal discrimination ability and to maintain a certain strength of the Capon spectrum, a compromise value for the order m of the covariance matrix needs to be specified. In this study, the order m is set to 128.
In order to verify the effect of the proposed scheme in this paper, we selected three sets of data at different fixed frequency points for testing and comparison: 7.6 MHz, 8.15 MHz, 11.05 MHz; in addition, we also tested a set of 6~15 MHz OIS data of swept frequency.
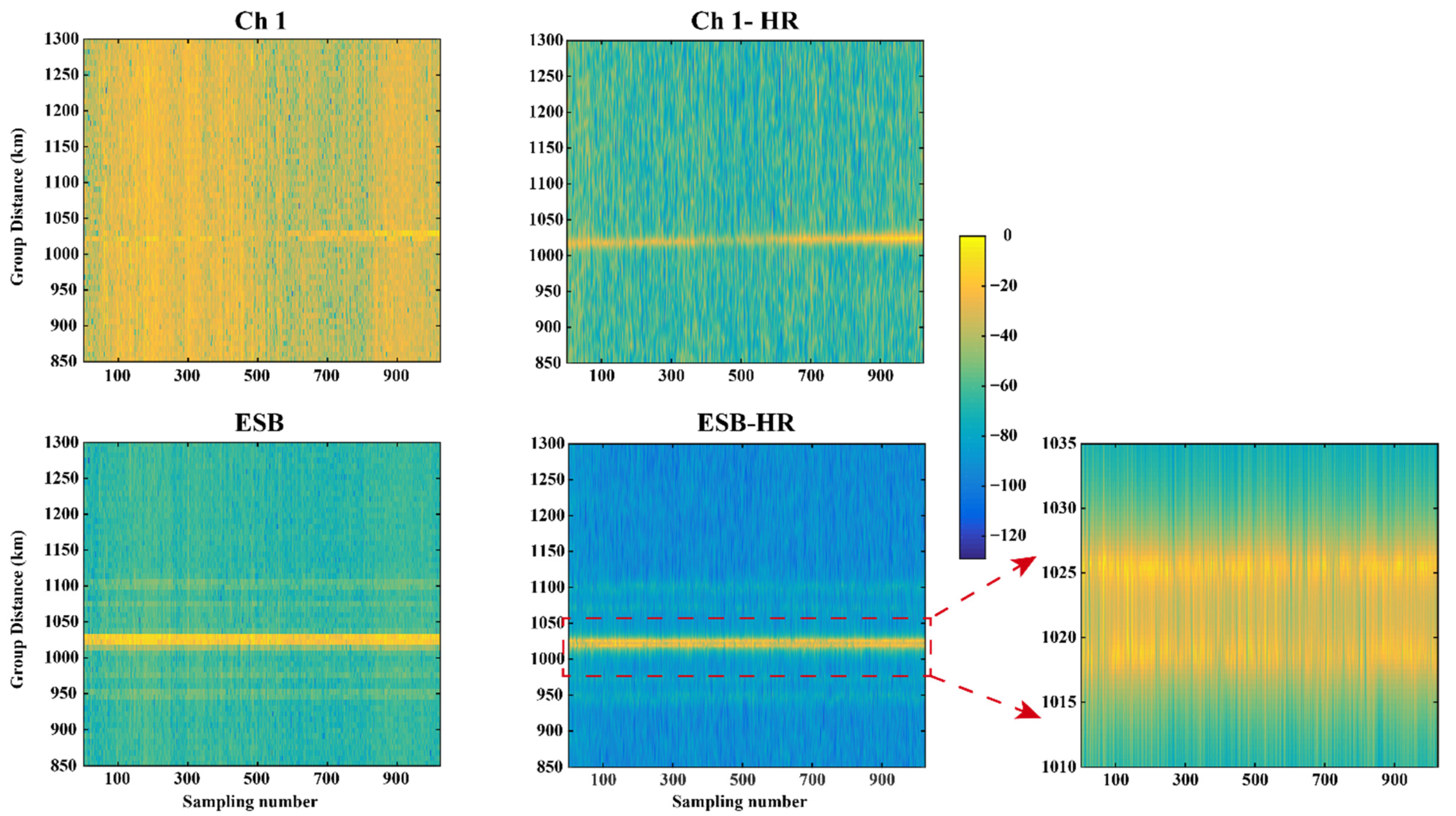
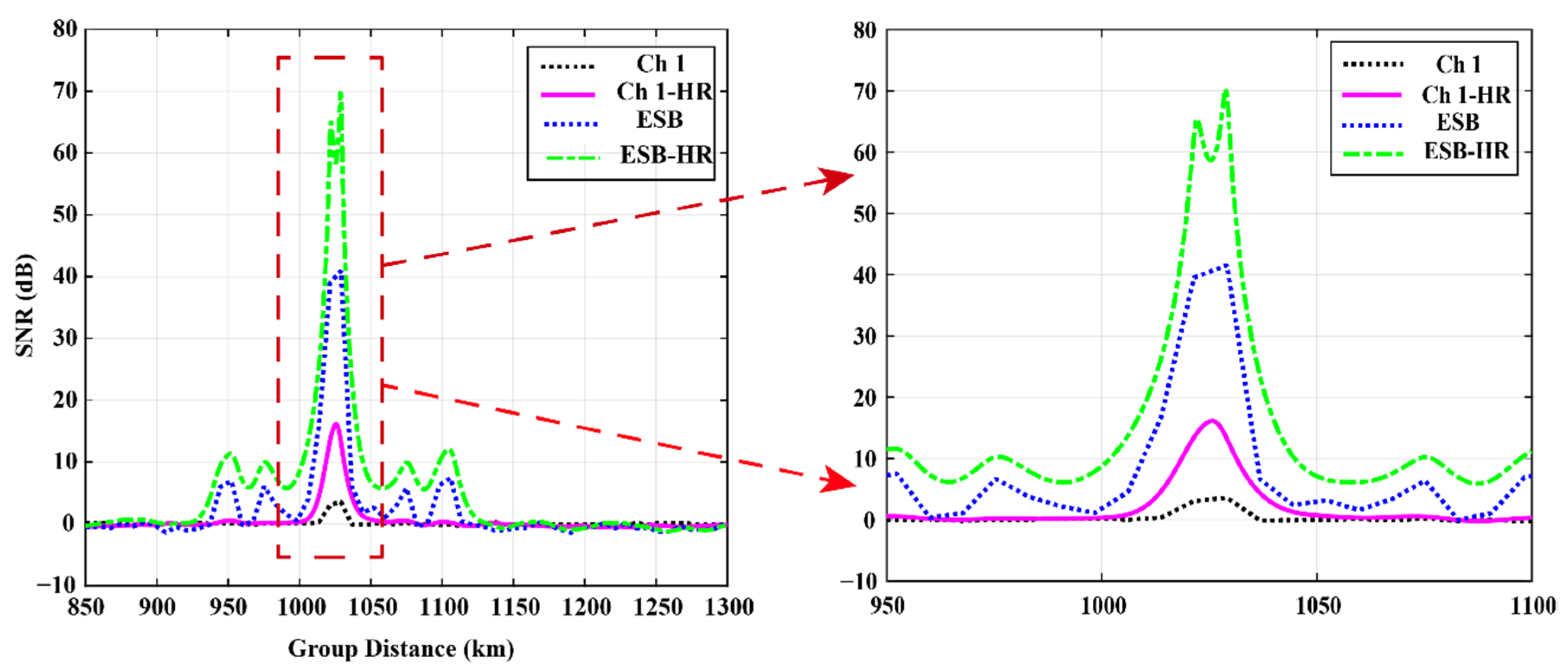
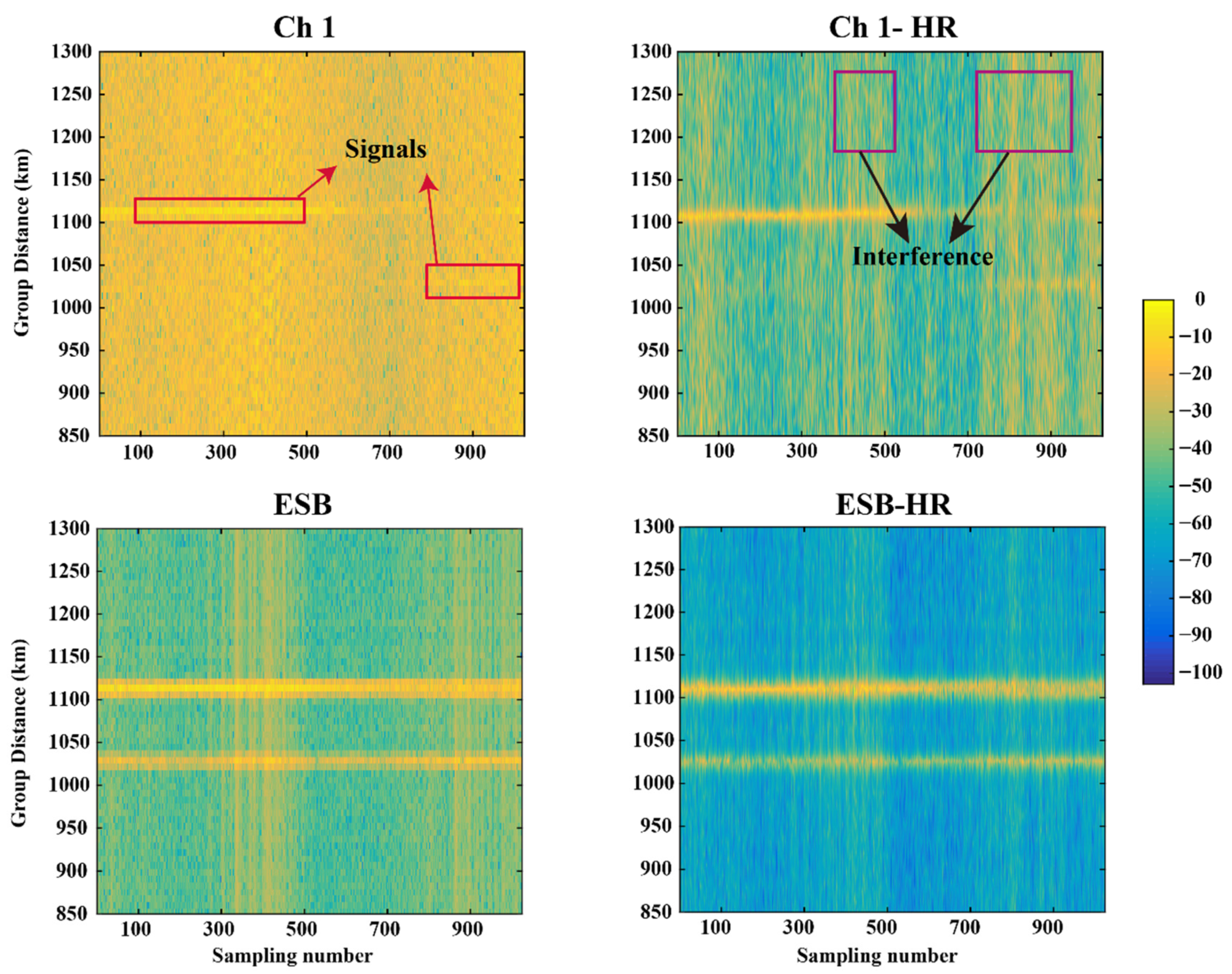
Figure 10 is the normalized ionogram of the 7.6 MHz OIS signal in different situations, this set of data was collected at 17:04:59 Beijing Time (BJT, UTC+8) on 13 January 2020; the sunrise time was 07:34:55 BJT and the sunset time was 17:10:35 BJT. Where “Ch 1” represents the OIS signal of Channel 1, “Ch 1-HR” represents that the range resolution of the OIS signal of Channel 1 is directly increased by 10 times through Capon HRRP algorithm, and “ESB” represents the signal of six channels after being processed by the ESB algorithm, ”ESB-HR” indicates that the signals of six channels are processed by Capon HRRP after ESB adaptive beamforming; the horizontal axis represents the number of sampling points of one detection, that is one range bin, and the vertical axis represents the group distance. It can be seen from the
Figure 10 that the background noise and interference of Channel 1 are mixed together, and the mixed values are about −18 dB, which is relatively high, so that the desired signals are submerged and inconspicuous. Specifically, at a group distance of about 1029 km, the desired signal is almost invisible. When the signal of Channel 1 is processed by Capon HRRP, it can be seen that the background noise can be suppressed a lot. The average value is about −27 dB, which is 9 dB lower than the background noise of Channel 1. This is because the interference and noise have no correlation with the local code, so their phase spectrum does not have linear relationship as the Equation (12) between their frequency components of cross spectrum and the local code, resulting in great suppression in the Capon spectrum estimation. However, relatively speaking, the desired signal is more significantly enhanced, and the trace becomes much clearer after the six-channel signal is processed by the ESB adaptive beamforming algorithm, and the effect is better than the signal of Channel 1 only processed with Capon HRRP algorithm. Compared with Capon HRRP algorithm, the ESB algorithm has better suppression effect on interference and noise under the certain conditions. Moreover, when the synthesized signal by the ESB algorithm is processed by the Capon HRRP algorithm, it can be seen that the interference is almost suppressed, the background noise is significantly reduced, to only about −65 dB. In addition, some regions where the desired signal is very weak or even completely overwhelmed by interference and noise becomes much clearer. Furthermore, more details can be observed, such as the widening or compression of the group distance of the received signal and the fluctuation of echo energy. It will be very helpful for research on the fine structure and the spatial–temporal evolution process inside the ionosphere.
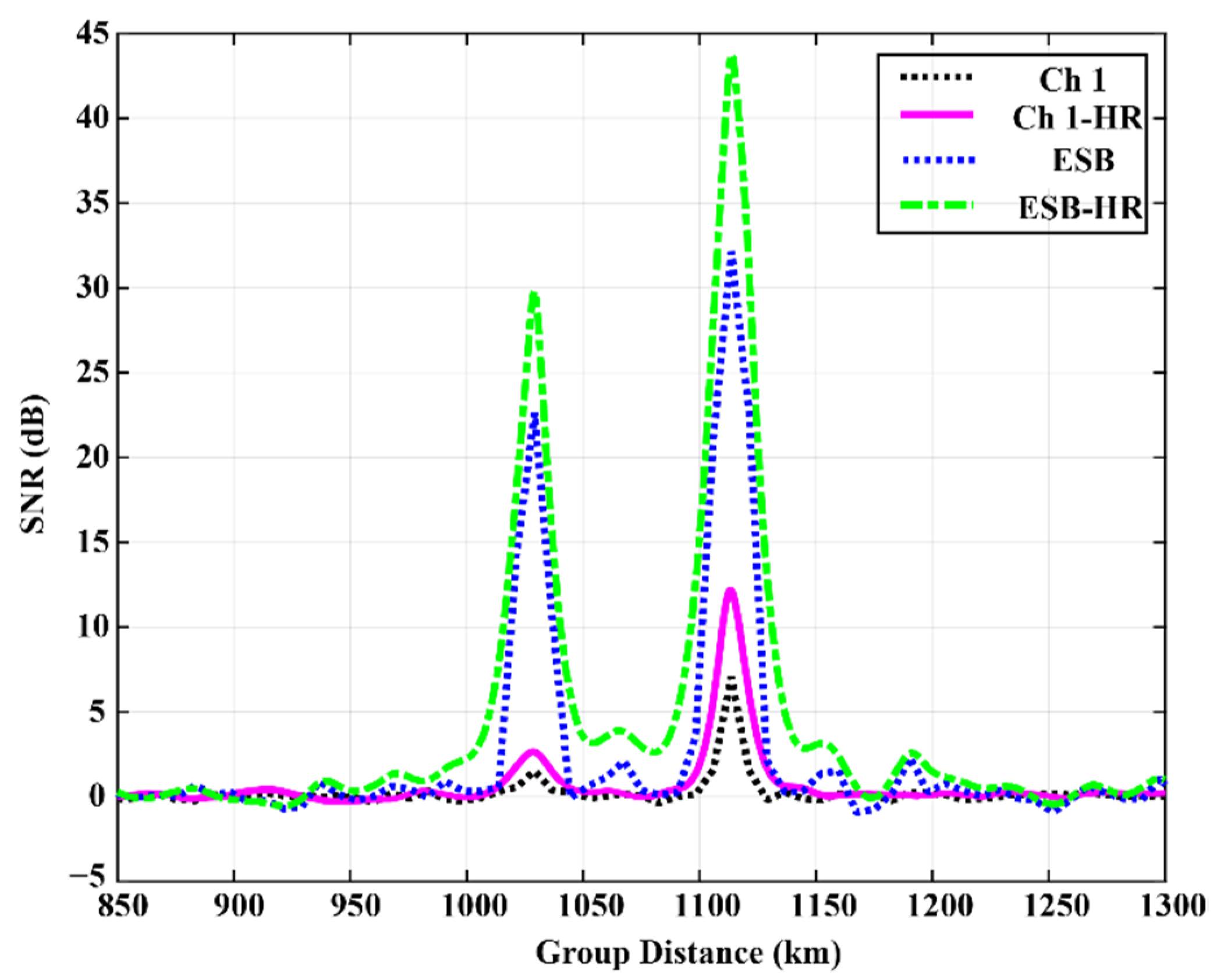
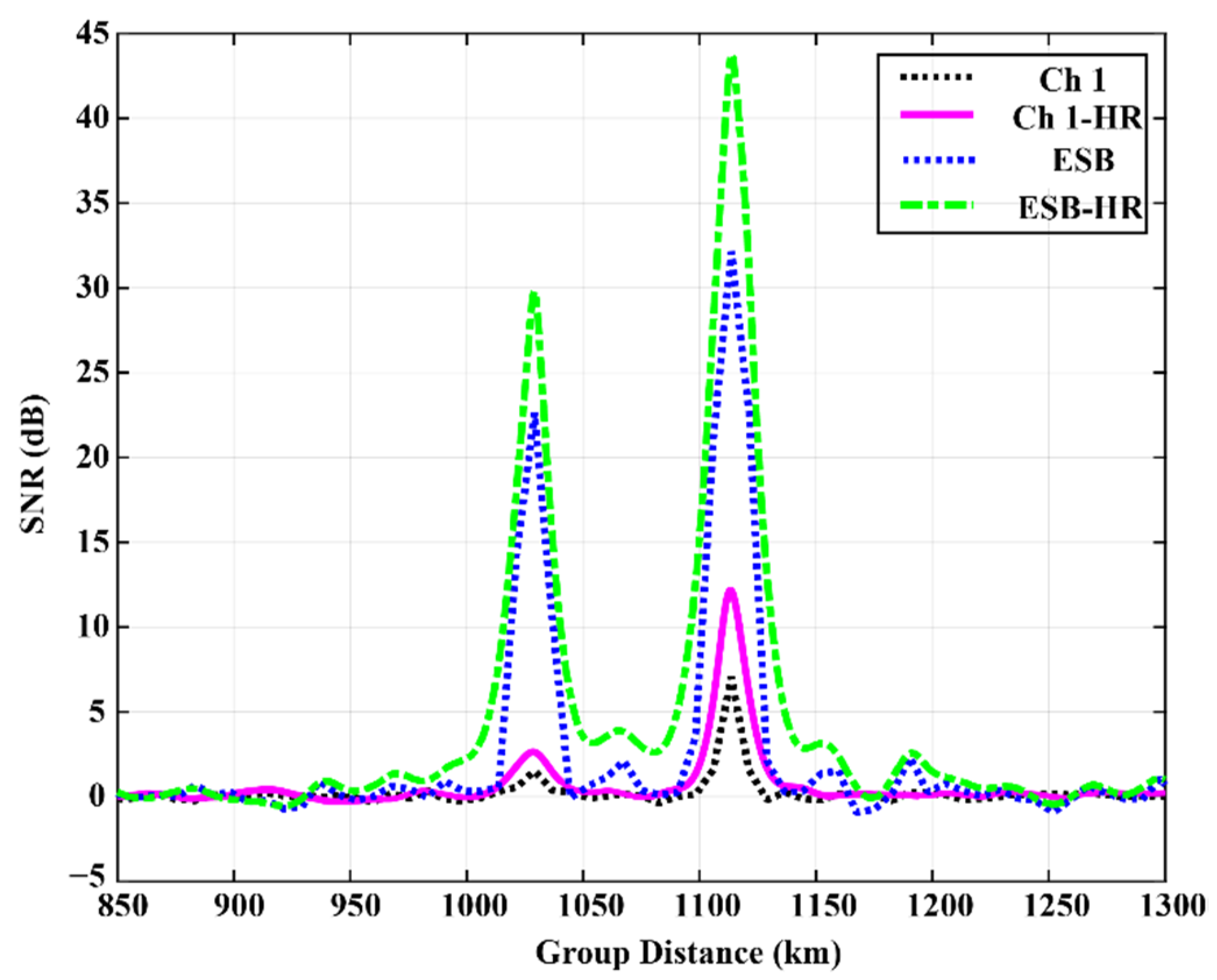
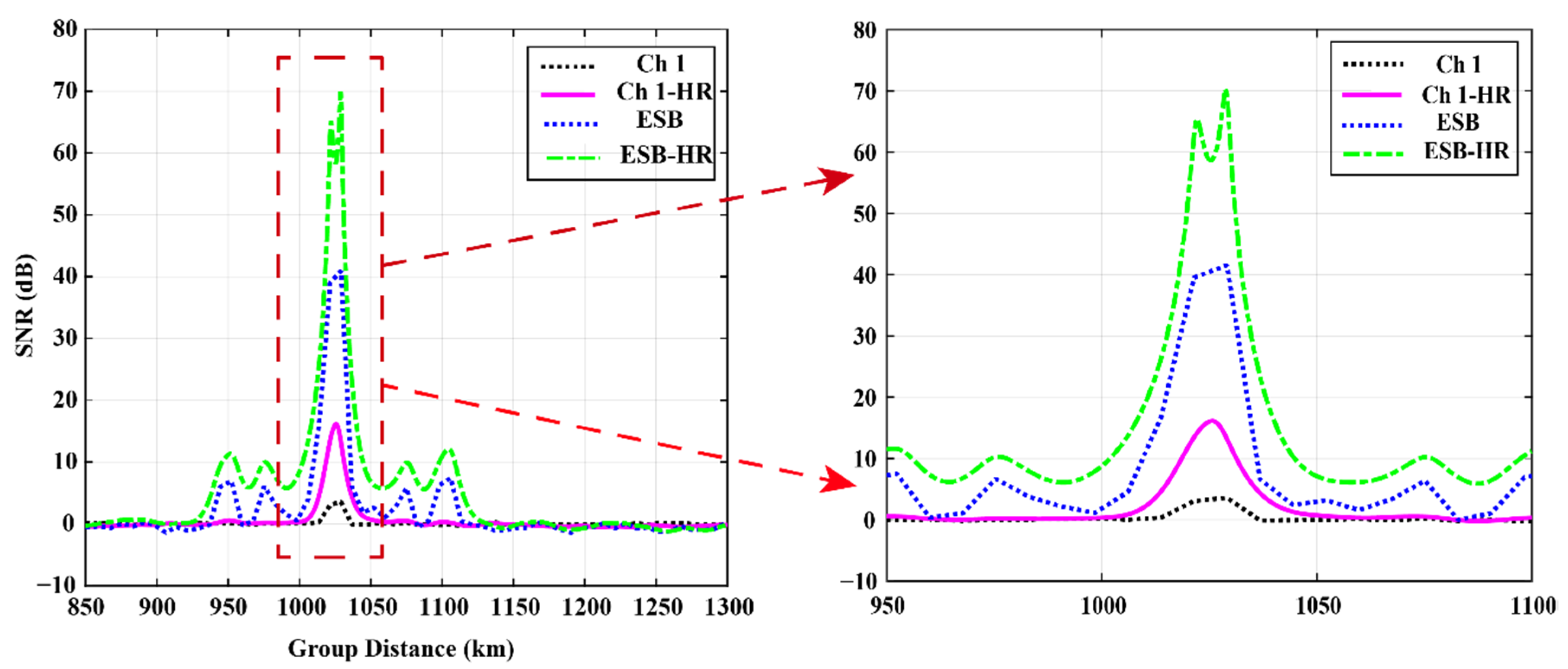
In order to reflect the improvement of SNR more intuitively, the background noise of each ionogram is set as a benchmark. Then, their SNRs can be compared more clearly, as shown in the following
Figure 11.
It can be seen from
Figure 11, compared with the echo signal of Ch 1, the SNR of ESB-HR at the group distance of 1029 km is improved by 28.28 dB, and by 36.62 dB at 1114 km. The improvement of SNR is obvious.
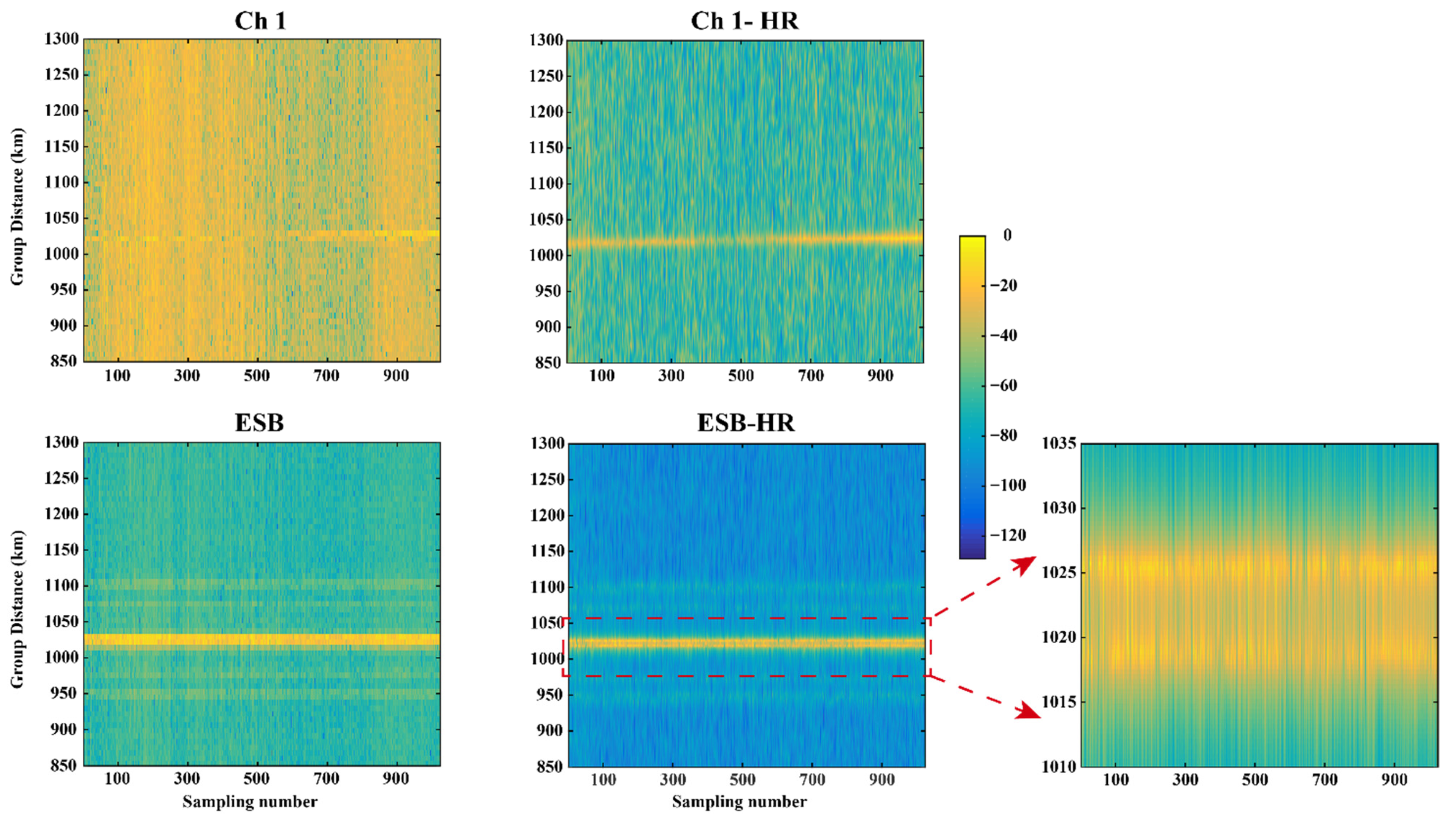
Moreover, a group of 11.05 MHz data is also tested this was collected at 13:08:59 BJT on 15 January 2020; the sunrise time was 07:34:16 BJT and the sunset time is 17:12:43 BJT.
Figure 12 is the OIS ionogram of the 11.05 MHz echo signal, according to the formula of the earth’s great circle distance and curvature radius, it can be known that this echo comes from the Es-layer. It can be clearly seen that the SNR is increased, and the interference and noise are suppressed, so the trace of the echo signal is clearly visible. And the ionogram quality is greatly improved. Furthermore, it also should be noted that the echo signal was synthesized by ESB algorithm, and then the range resolution was increased by 10 times, not only is the SNR significantly improved, but also the details of the echo signal are more abundant and comprehensive. The stratification of the Es-layer can be clearly seen from the ionogram of ESB-HR, while the stratification cannot be observed from the ionogram of Ch 1. When a single imaging result is taken, as shown in
Figure 13, it can be observed more clearly.
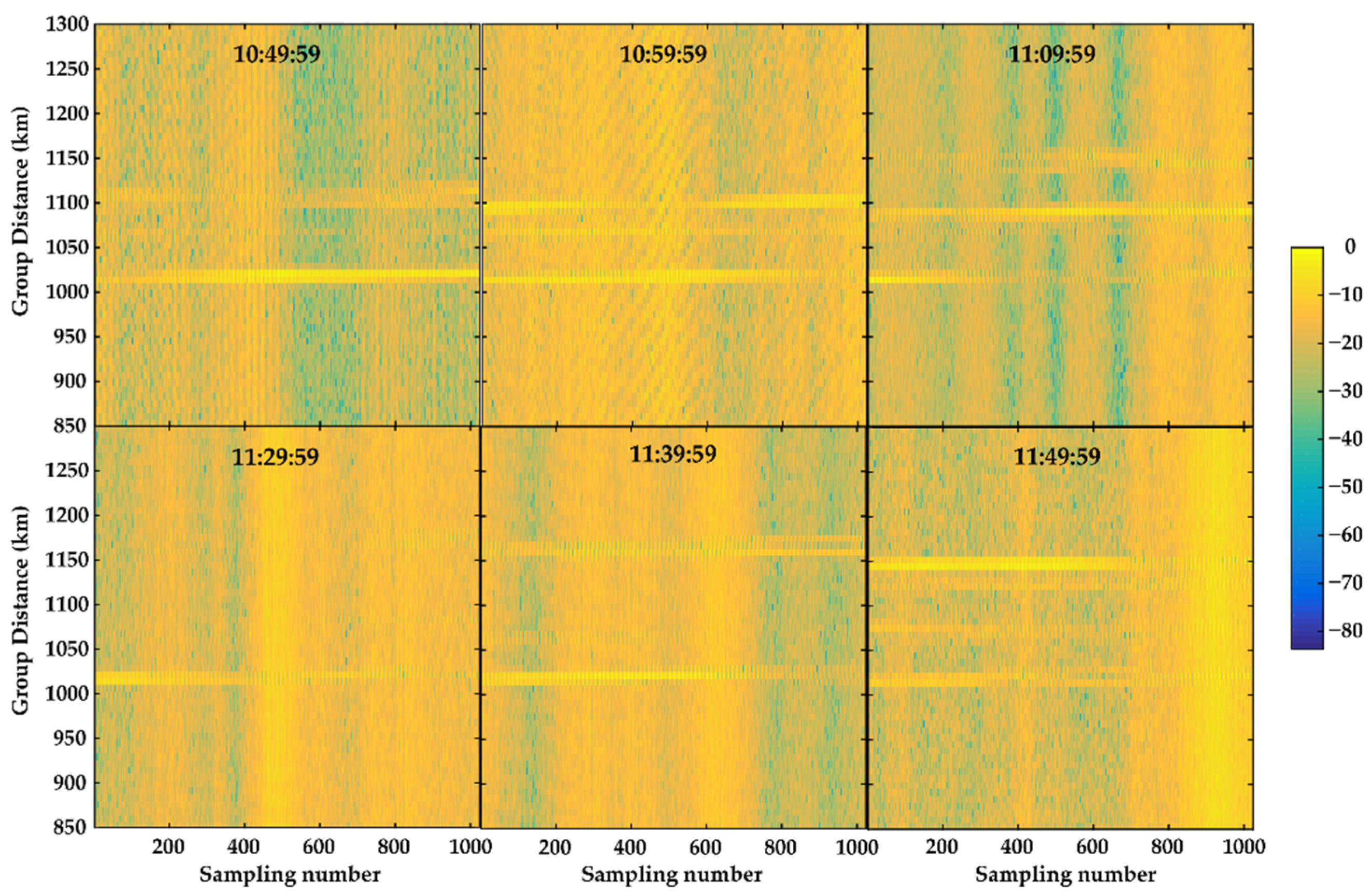
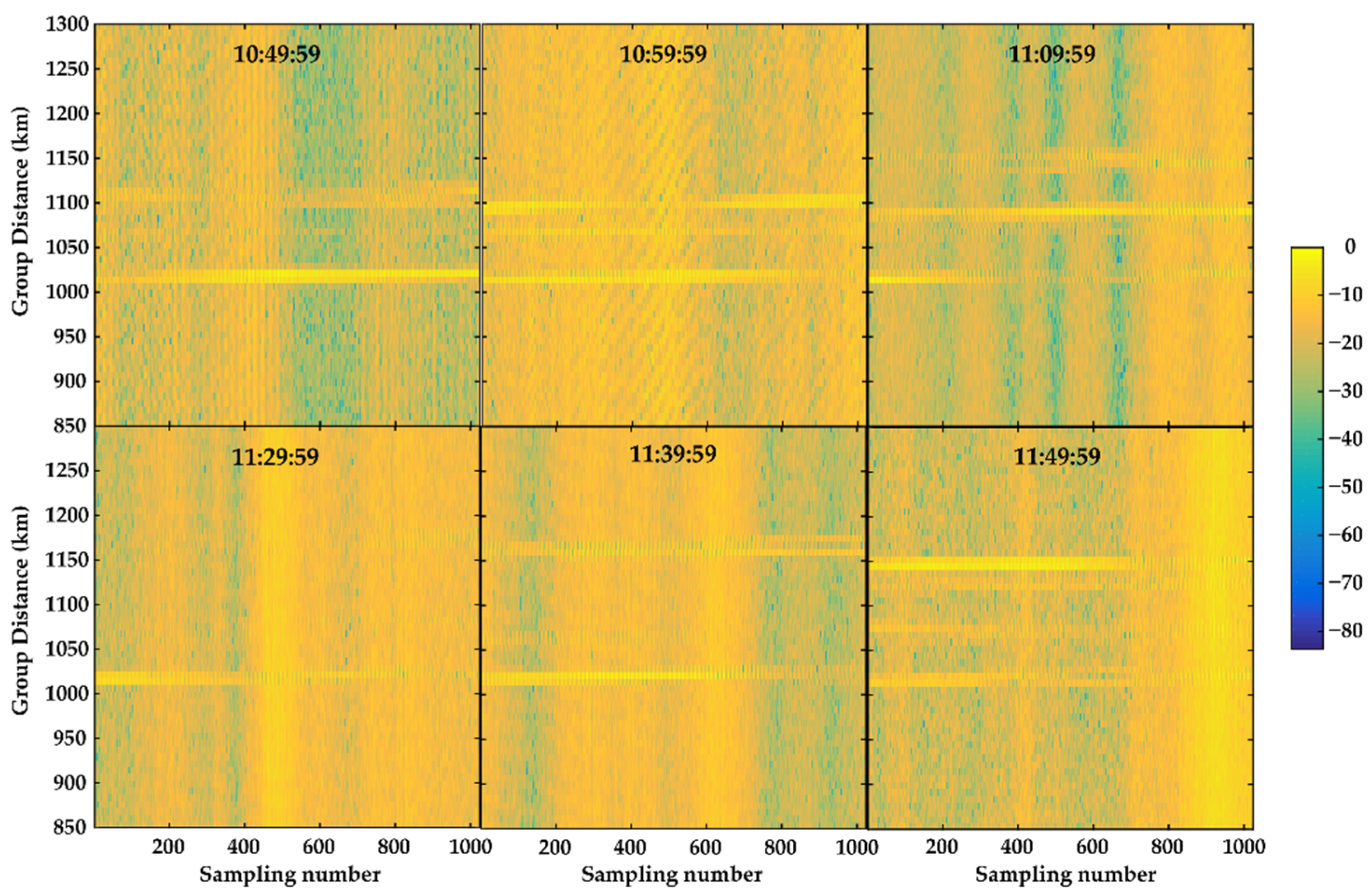
In addition, the movement of the ionosphere can also be monitored after improving the range resolution. As shown in
Figure 14, the frequency is 8.15 MHz, from 10:49:59 to 11:49:59 BJT on 18 January 2020; the sunrise time is 07:33:01 BJT and the sunset time is 17:16:01 BJT.
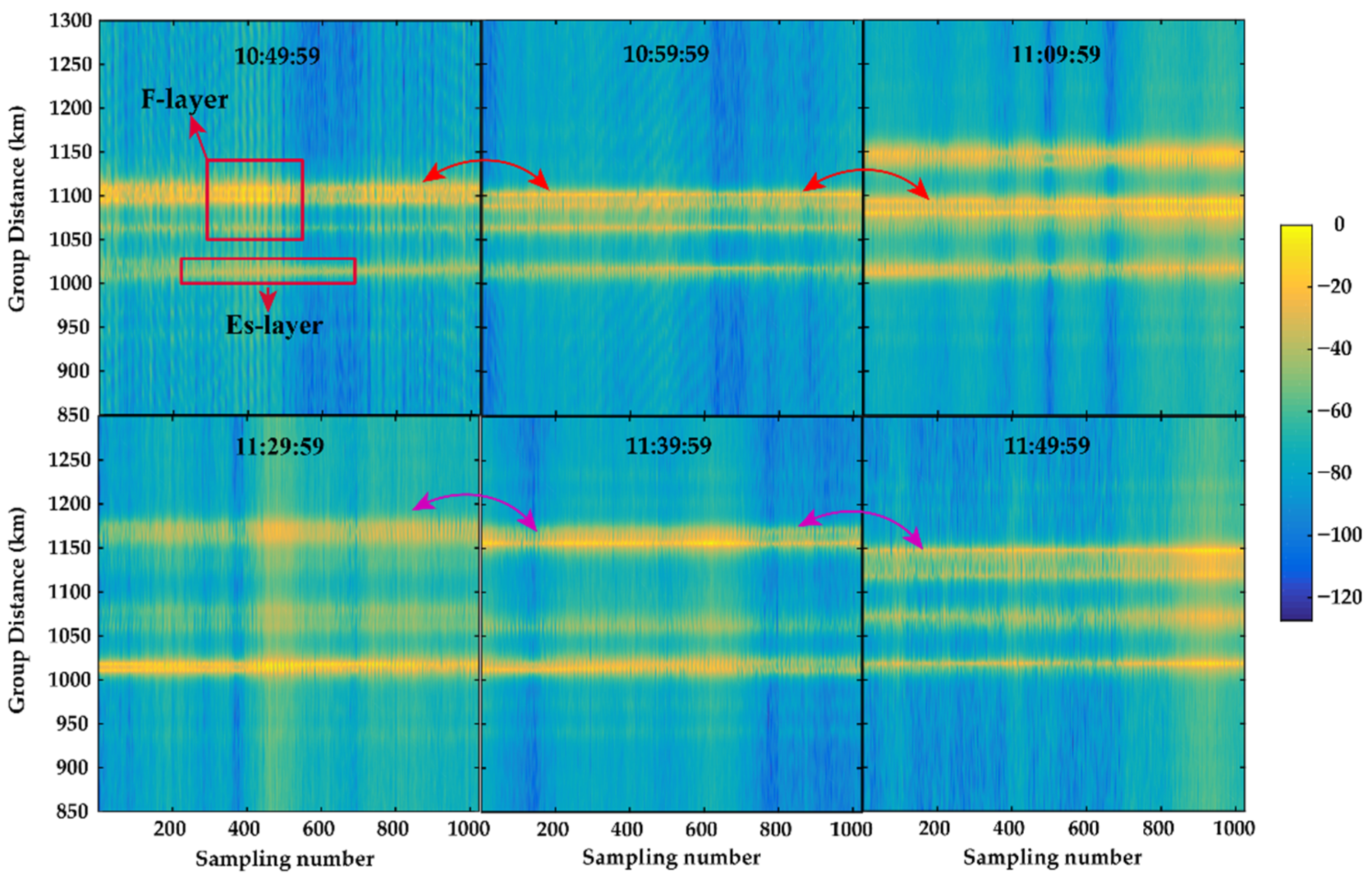
Figure 14 shows the OIS ionograms of a single channel at different times. As the ionogram quality and the range resolution is so poor, the traces can only be roughly identified, but the layered structures and finer movement process are difficult to describe. However, the ionogram quality can be significantly improved through the ESB and Capon HRRP algorithm. It can be noticed from
Figure 15 that during the period of 10:49:59–11:09:59 BJT, even the movement speed of some layered or internal structure of the F-layer can be roughly estimated. Obviously, it benefits from the improvement of the range resolution and ionogram quality. It also means that the structure and movement inside the ionosphere can be observed more finely, and its evolution process can be monitored in real-time.
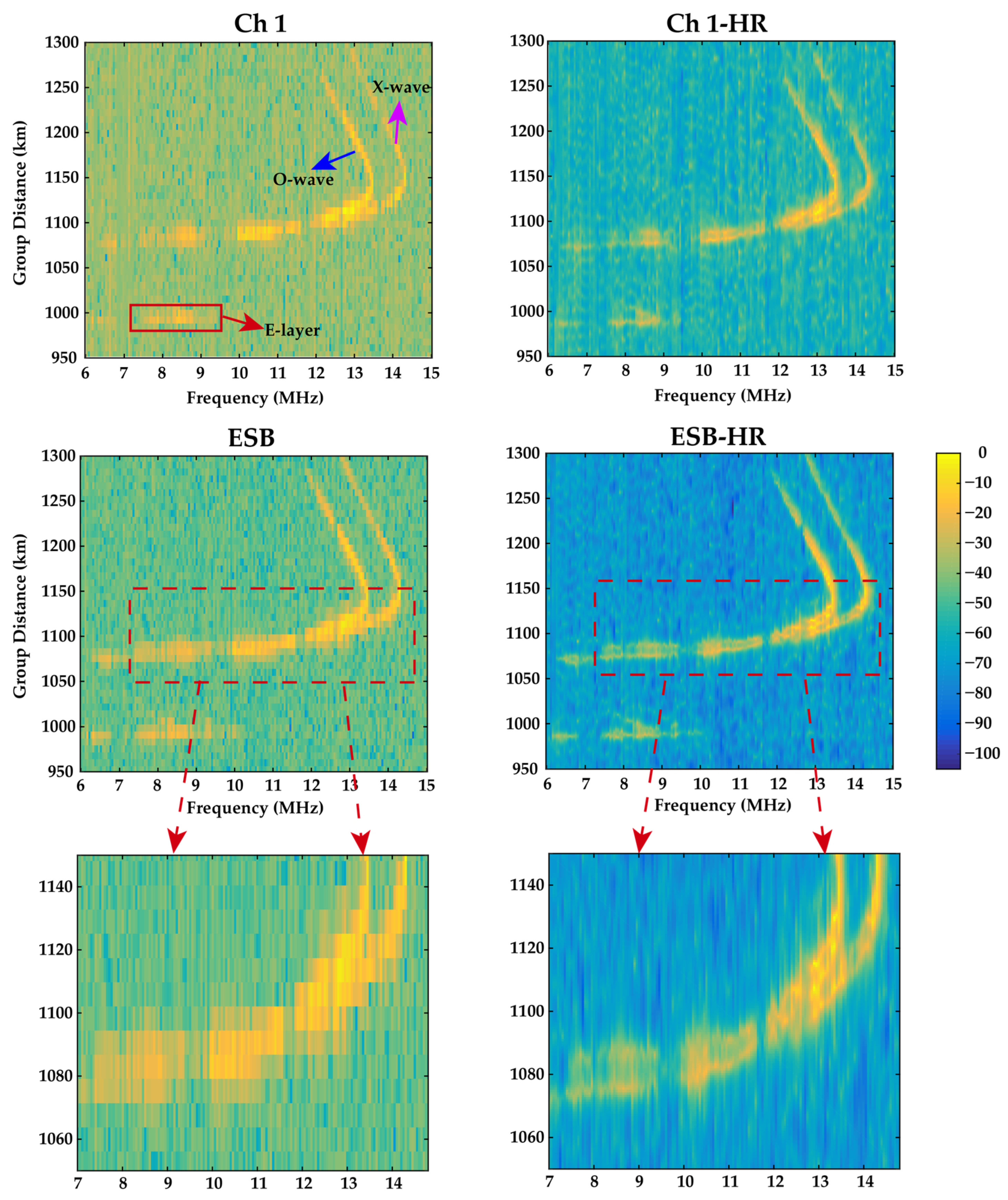
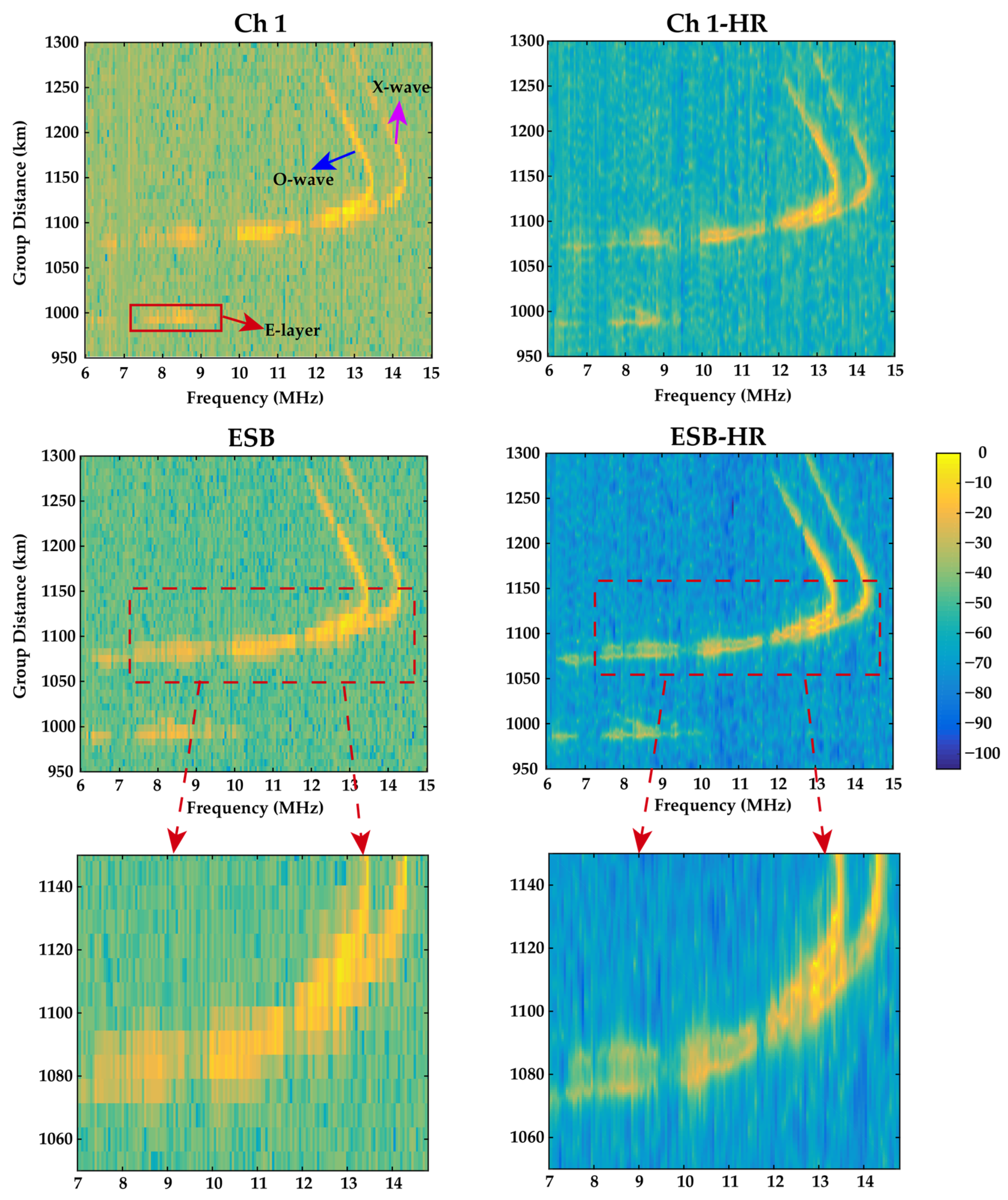
Figure 16 is the swept frequency OIS ionogram of 6~15 MHz, it comes from 12:24:59 BJT on 3 April 2021; the sunrise time is 05:55:08 BJT and the sunset time is 18:40:13 BJT. It can be seen from
Figure 16 that the SNR of the echo signal has been improved to a certain extent only through Capon HRRP, and the echo trace also has some improvement. The echo trace is much clearer and more continuous after ESB algorithm processing. For example, the echo of the E-layer, which is almost invisible in Channel 1, become clearer after being processed by the ESB algorithm. However, the separation process of O-wave and X-wave in the F2-layer is not obvious at this condition. After the joint processing of ESB and Capon HRRP, it can be seen from the ionogram that the separation process of O-wave and X-wave is obvious in both the high-angle wave and low-angle wave part. The separation process is more obvious and the trace of the echo becomes narrower, which has the potential to reflect the change process of the ionosphere more accurately. At the same time, it is also very conducive to the accurate interpretation of the group distance, MUF, and other parameters.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}