
Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar




Abstract
:
1. Introduction
2. Signal Model and Conventional 3D-STAP Methods
2.1. Signal Model for SBEWR
2.2. A Brief Review on Conventional 3D-STAP Methods
3. Nonstationary Clutter Analysis for SBEWR
3.1. 3D Distribution of Non-Stationary Clutter for SBEWR
3.2. Differences in Nonstationary Clutter between SBEWR and AEWR
3.2.1. Non-Stationarity of the Mainlobe Clutter in the Elevation Dimension
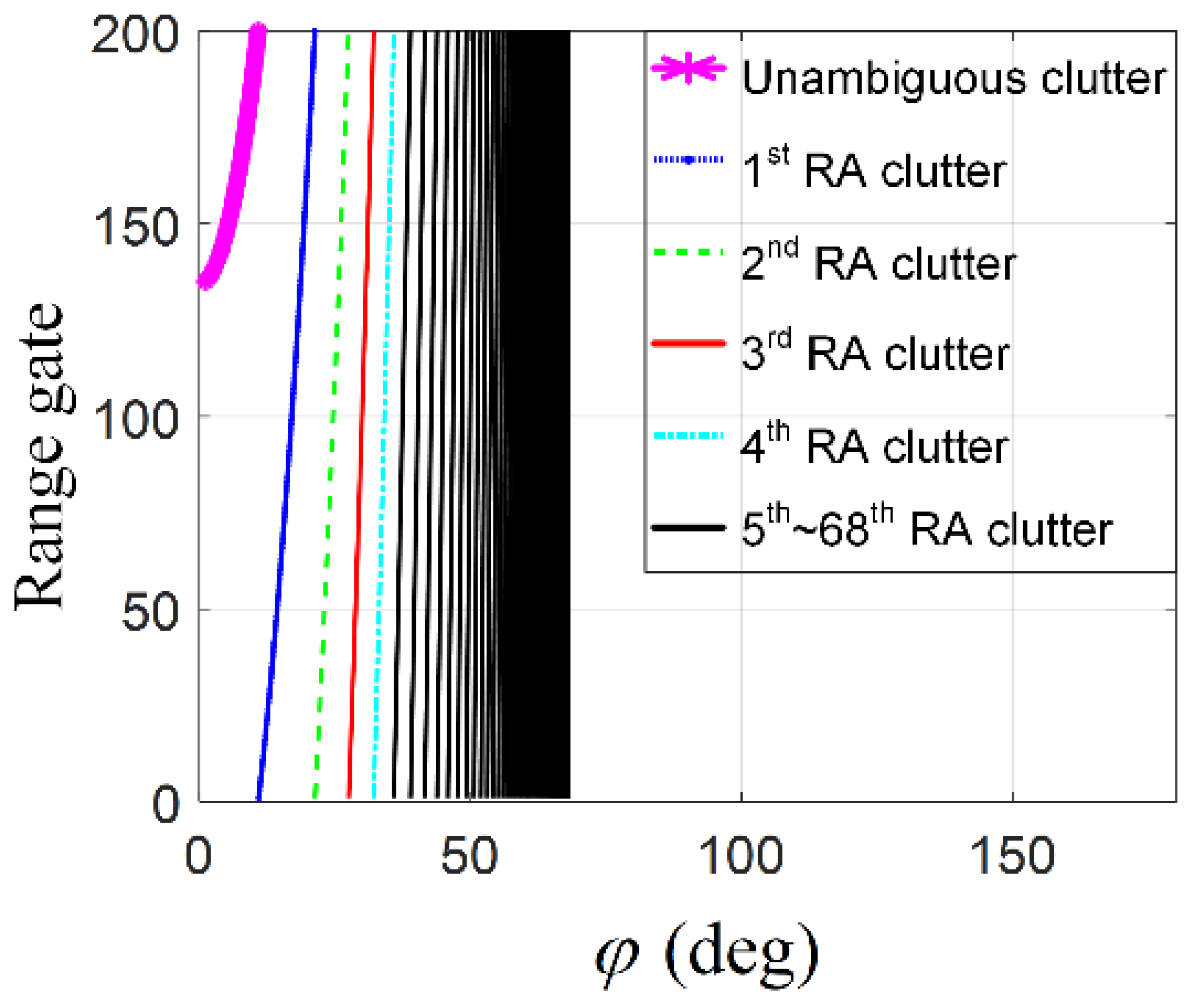
3.2.2. Doppler Distributions of Different RA Components in One Range Gate
3.2.3. Clutter Degrees of Freedom (DOFs) in the Elevation Dimension
4. Proposed Dimension-Reduced Structures for 3D-STAP Methods
4.1. 3D-SDB
4.2. 3D-GMB
4.3. 3D-SS-DDL
5. Further Analysis and Discussion
5.1. Suitable Plans for 3D-SDB and 3D-GMB for SBEWR
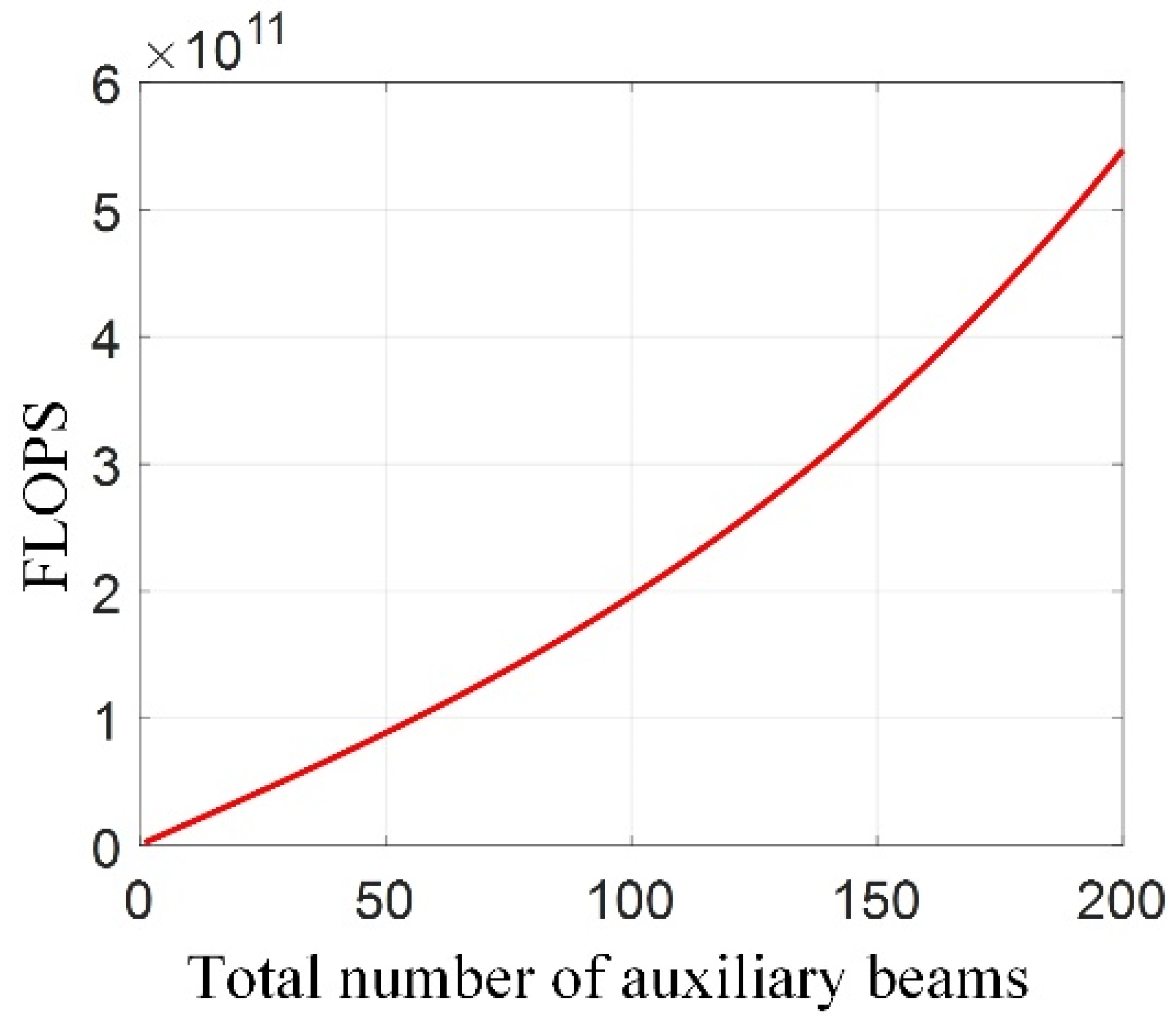
5.2. Computational Complexity Analysis
5.3. A Limitation of the 3D-STAP Methods
6. Simulation Experiments
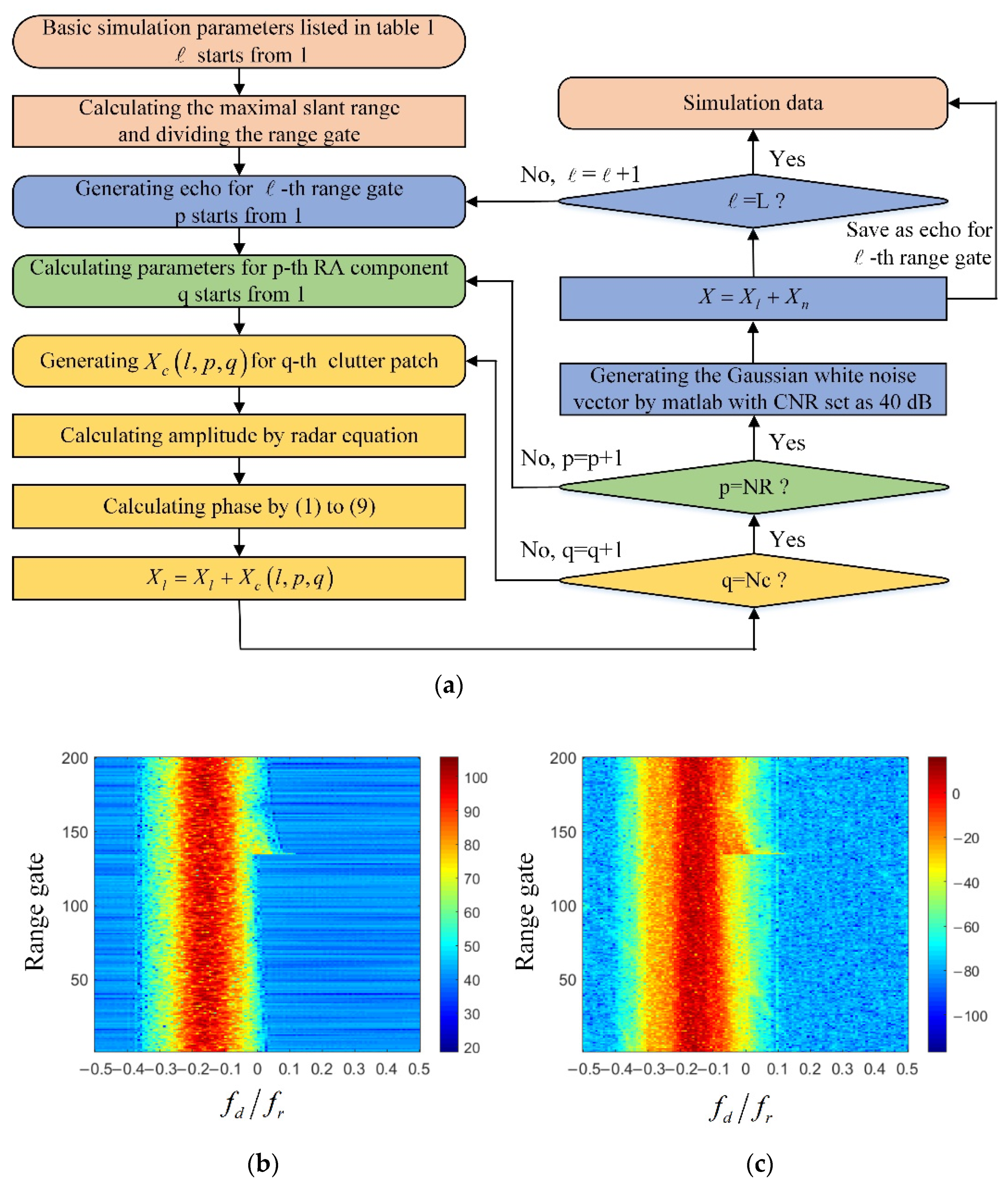
6.1. Data Description
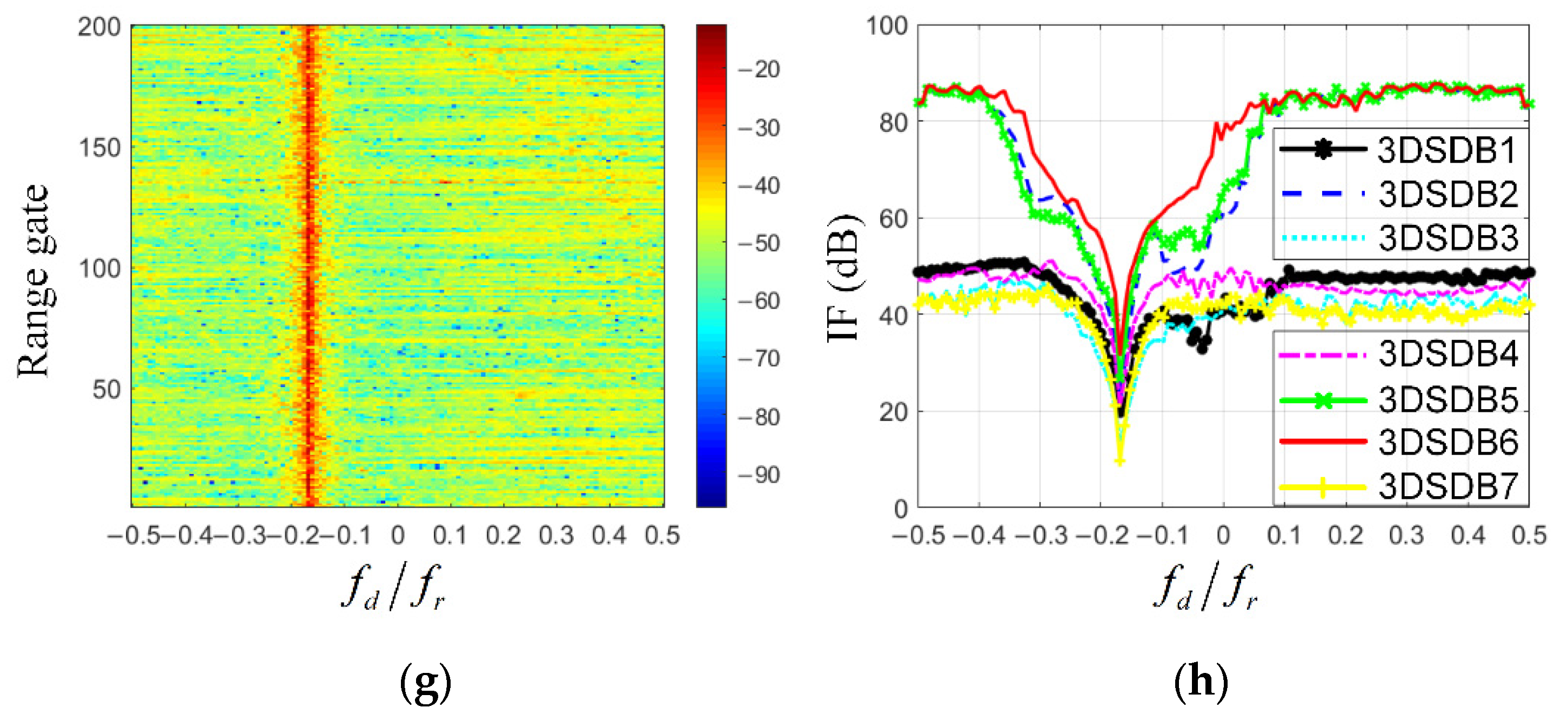
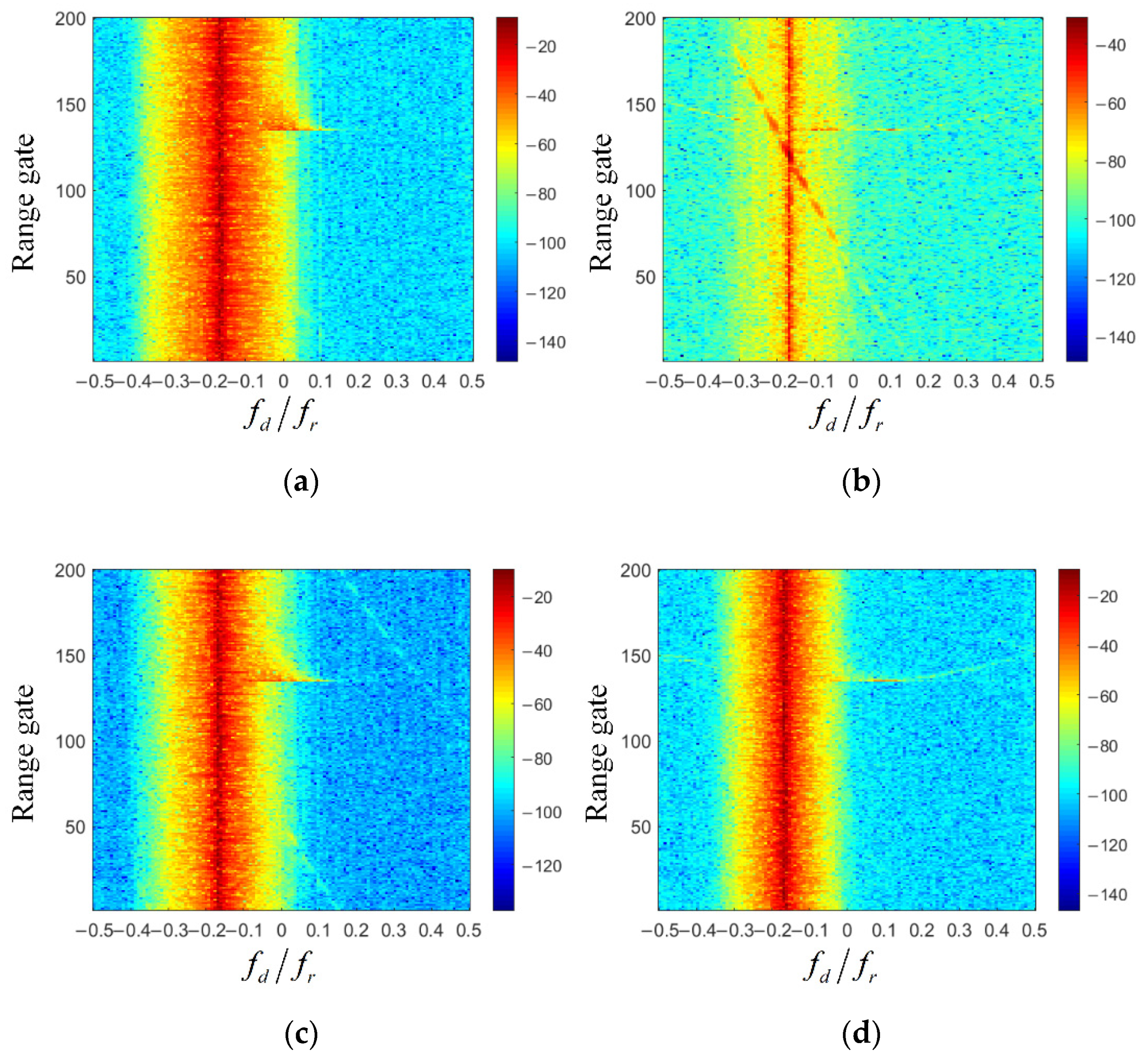
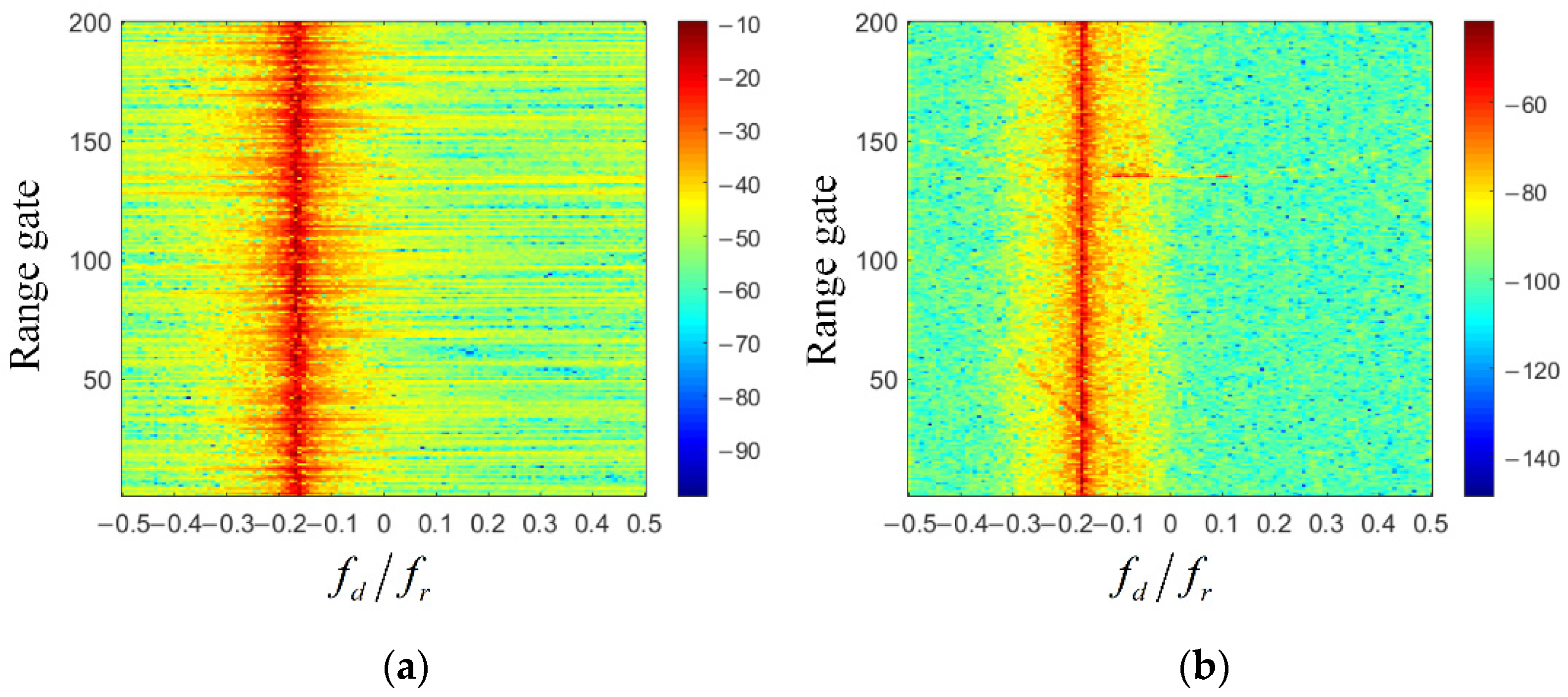
6.2. Experiment 1: Performance Analysis of Seven Structures for 3D-SDB
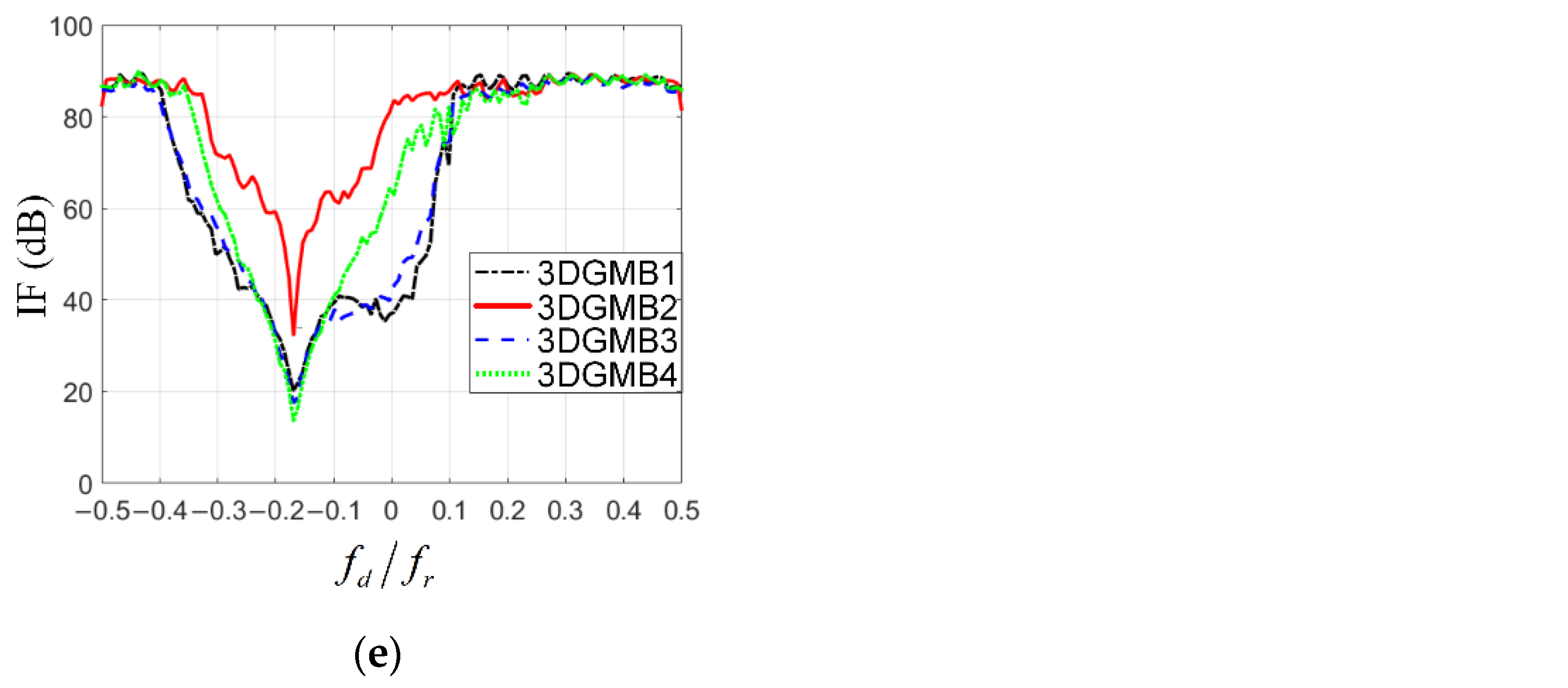
6.3. Experiment 2: Performance Analysis of the Four Structures for 3D-GMB
6.4. Experiment 3: Performance Analysis for 3D-SS-DDL
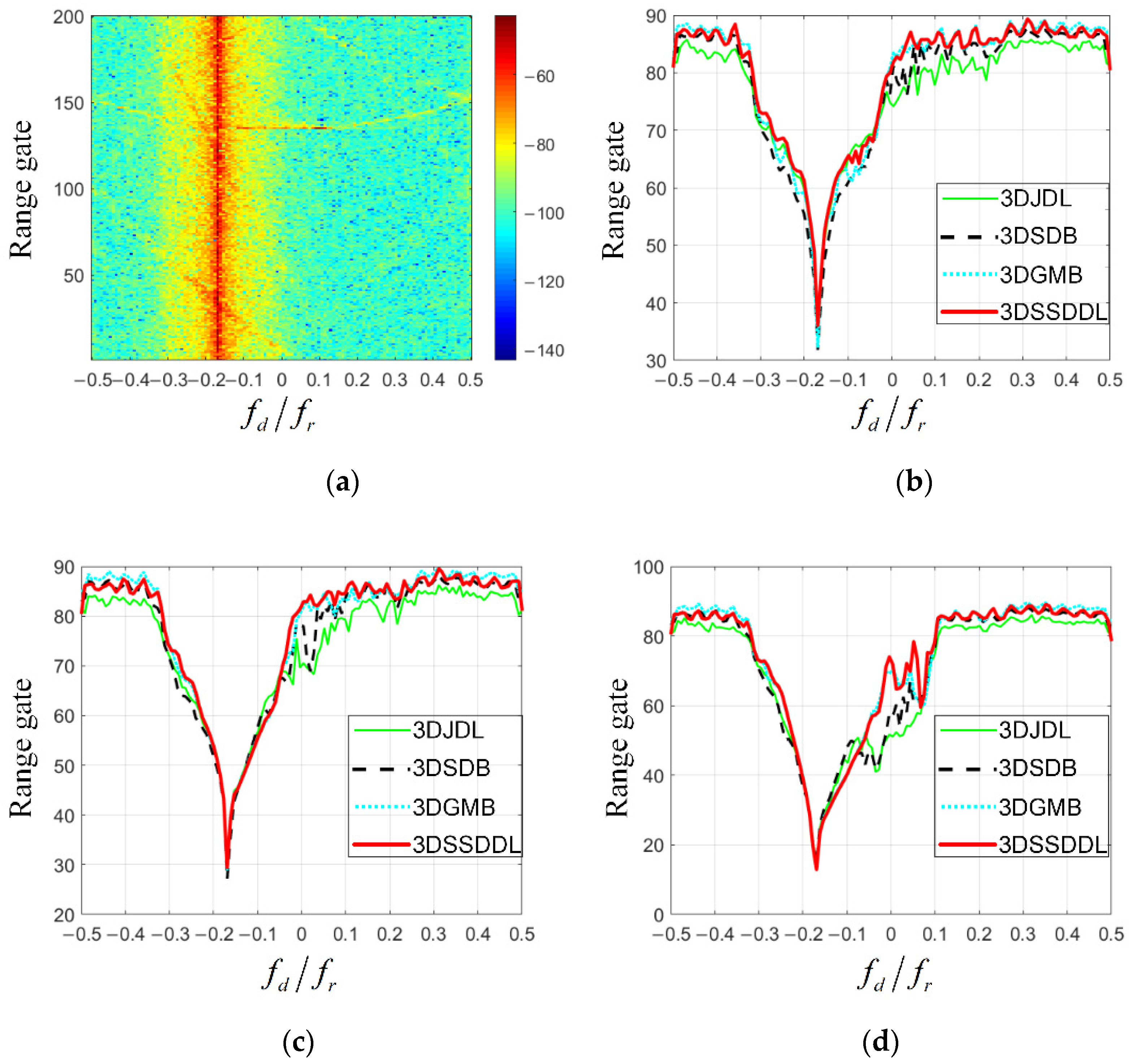
6.5. Experiment 4: Performance Comparison among the 3D-JDL and Three Proposed Methods
6.6. Experiment 5: Computational Complexity Comparison
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, H.; Liao, G.; Xu, J.; Lan, L. An Efficient Maritime Target Joint Detection and Imaging Method with Airborne ISAR System. Remote Sens. 2022, 14, 193. [Google Scholar] [CrossRef]
- Li, Y.; Huo, T.; Yang, C.; Wang, T.; Wang, J.; Li, B. An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR. Remote Sens. 2022, 14, 210. [Google Scholar] [CrossRef]
- Han, J.; Cao, Y.; Wu, W.; Wang, Y.; Yeo, T.-S.; Liu, S.; Wang, F. Robust GMTI Scheme for Highly Squinted Hypersonic Vehicle-Borne Multichannel SAR in Dive Mode. Remote Sens. 2021, 13, 4431. [Google Scholar] [CrossRef]
- Li, K.; Mangiat, S.; Zulch, P.; Pillai, U. Clutter Impacts on Space Based Radar GMTI: A Global Perspective. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 18 June 2007; pp. 1–15. [Google Scholar]
- Brennan, L.; Reed, L. Theory of Adaptive Radar. IEEE Trans. Aerosp. Elect. Syst. 1973, 9, 237–252. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing, 3rd ed.; IET: London, UK, 2006; pp. 159–177. [Google Scholar]
- Guerci, J. Space-Time Adaptive Processing for Radar, 2nd ed.; Artech House: London, UK, 2014; pp. 115–170. [Google Scholar]
- Melvin, W. A stap over view. IEEE Trans. Aerosp. Elect. Syst. 2004, 19, 19–35. [Google Scholar] [CrossRef]
- Borsari, G. Mitigating effects on stap processing caused by an inclined array. In Proceedings of the 1998 IEEE Radar Conference, Dallas, TX, USA, 11–14 May 1998; pp. 135–140. [Google Scholar]
- Himed, B.; Zhang, Y.; Hajjari, A. Stap with angle-Doppler compensation for bistatic airborne radars. In Proceedings of the 2002 IEEE Radar Conference, Long Beach, CA, USA, 25 April 2002; pp. 311–317. [Google Scholar]
- Jia, F.; He, Z.; Li, J.; Qian, J. Adaptive angle-Doppler compensation in airborne phased radar for planar array. In Proceedings of the 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1585–1588. [Google Scholar]
- Lapierre, F.; Verly, J.; Van Droogenbroeck, M. New solutions to the problem of range dependence in bistatic STAP radars. In Proceedings of the 2003 IEEE Radar Conference, Huntsville, AL, USA, 8 May 2003; pp. 452–459. [Google Scholar]
- Wu, J.; Wang, T.; Meng, X.; Bao, Z. Clutter suppression for airborne nonsidelooking radar using ERCB-STAP algorithm. IET Radar Sonar Navig. 2010, 4, 497–506. [Google Scholar] [CrossRef]
- Shen, M.; Meng, X.; Zhang, L. Efficient adaptive approach for airborne radar short-range clutter suppression. IET Radar Sonar Navig. 2012, 6, 900–904. [Google Scholar] [CrossRef]
- Wang, Z.; Xie, W.; Duan, K.; Gao, F.; Wang, Y. Short-range clutter suppression based on subspace projection preprocessing for airborne radar. In Proceedings of the 2016 CIE International Conference on Radar, Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Hale, T.; Temple, M.; Raquet, J.; Oxley, M.; Wicks, M. Localized three-dimensional adaptive spatial-temporal processing for airborne radar. In Proceedings of the RADAR 2002, Edinburgh, UK, 15–17 October 2002; pp. 191–195. [Google Scholar]
- Duan, K.; Xu, H.; Yuan, H.; Xie, H.; Wang, Y. Reduced-DOF Three-Dimensional STAP via Subarray Synthesis for Nonsidelooking Planar Array Airborne Radar. IEEE Trans. Aerosp. Elect. Syst. 2020, 56, 3311–3325. [Google Scholar] [CrossRef]
- Reed, I.; Mallett, J.; Brennan, L. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Elect. Syst. 1974, 10, 853–863. [Google Scholar] [CrossRef]
- Pillai, S.; Himed, B.; Li, K. Effect of earth’s rotation and range foldover on space-based radar performance. IEEE Trans. Aerosp. Elect. Syst. 2006, 42, 917–932. [Google Scholar] [CrossRef]
- Brown, R.; Schneible, R.; Wicks, M.; Wang, H.; Zhang, Y. STAP for clutter suppression with sum and difference beams. IEEE Trans. Aerosp. Elect. Syst. 2000, 36, 634–646. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, J.; Bao, Z.; Peng, Y. Robust space-time adaptive processing for airborne radar in nonhomogeneous clutter environments. IEEE Trans. Aerosp. Elect. Syst. 2003, 39, 70–81. [Google Scholar] [CrossRef]
- Wang, H. Space-Time Processing for Airborne Radar; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Raphael Hunger. Floating Point Operations in Matrix-Vector Calculus. Available online: http://mediatum.ub.tum.de/doc/625604/625604.pdf (accessed on 1 September 2007).
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; MIT Lincoln Lab: Lexington, MA, USA, 1994. [Google Scholar]
- Wang, H.; Cai, L. On adaptive spatial-temporal processing for airborne surveillance radar systems. IEEE Trans. Aerosp. Elect. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]
- Lin, Y.; Wu, N. Space Based Early Warning Radar; National Defense Industry Press: Beijing, China, 2018; pp. 12–13. [Google Scholar]
- Pillai, S.; Himed, B.; Li, K. Orthogonal pulsing schemes for improved target detection in space based radar. In Proceedings of the 2005 IEEE Aerospace Conference, Big Sky, MT, USA, 5 March 2005; pp. 2180–2189. [Google Scholar]
- Pillai, S.; Himed, B.; Li, K. Waveform diversity for space based radar. In Proceedings of the 2004 International Waveform Diversity & Design Conference, Edinburgh, UK, 8 November 2004; pp. 1–5. [Google Scholar]
- Pillai, S.; Himed, B.; Li, K. Space Based Radar: Theory and Applications; McGraw-Hill: New York, NY, USA, 2008; pp. 215–295. [Google Scholar]
- Chen, J.; Huang, P.; Huo, L.; Yang, D.; Li, S.; Shao, F.; Liu, X. A Beam Position Design Algorithm for Space-Based Early Warning Radar. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11 July 2021; pp. 5016–5019. [Google Scholar]
- Lv, W.; Li, W. The Simulation of the Detecting Ability of Space-Based Early-Warning System with the Effect of Interference. In Proceedings of the 2011 International Conference of Information Technology, Computer Engineering and Management Sciences, Nanjing, China, 24 September 2011; pp. 88–91. [Google Scholar]
- Huang, P.; Zou, Z.; Xia, X.; Liu, X.; Liao, G.; Xin, Z. Multichannel Sea Clutter Modeling for Spaceborne Early Warning Radar and Clutter Suppression Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8349–8366. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | AEWR | SBEWR |
|---|---|---|
| Height of platform | 8 km | 500 km |
| Maximum of slant range | 368.9 km | 2573.5 km |
| Beam steering in elevation | 89 deg | 30 deg |
| Velocity of platform | 150 m/s | 7606 m/s |
| Crab angle | 30 deg | 3.77 deg |
| Range resolution | 150 m | 150 m |
| Pulse repetition frequency | 5000 Hz | 5000 Hz |
| Carrier frequency | 2.5 GHz | 0.5 GHz |
| Pulse number | 32 | 128 |
| Elevation array number | 8 | 16 |
| Azimuth array number | 16 | 256 |
| Operations | FLOPS |
|---|---|
| Filter and CCM estimation | |
| Inverse of CCM | |
| Calculation of optimal weight | |
| Adaptive filter |
| Methods | FLOPS |
|---|---|
| 3D-JDL (5 × 5 × 5) | |
| 3D-SDB (5 × 2 × 5) | |
| 3D-GMB ((9 + 3) × 3) | |
| 3D-SS ((16 + 8) × 128) | |
| 3D-SS-DDL ((16 + 8) × 3) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Chen, W.; Zhang, T.; Xing, M.; Wang, Y. Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar. Remote Sens. 2022, 14, 4011. https://doi.org/10.3390/rs14164011
Wang Z, Chen W, Zhang T, Xing M, Wang Y. Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar. Remote Sensing. 2022; 14(16):4011. https://doi.org/10.3390/rs14164011
Chicago/Turabian StyleWang, Zhihao, Wei Chen, Tianfu Zhang, Mengdao Xing, and Yongliang Wang. 2022. "Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar" Remote Sensing 14, no. 16: 4011. https://doi.org/10.3390/rs14164011
APA StyleWang, Z., Chen, W., Zhang, T., Xing, M., & Wang, Y. (2022). Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar. Remote Sensing, 14(16), 4011. https://doi.org/10.3390/rs14164011