1. Introduction
By estimations, there are over 35 million miles of utility pipes in the US alone [
1]. Many of these pipes date back to the 1800s and have deteriorated, creating both an environmental and human safety concern [
2]. Unfortunately, reliable ground truth maps are frequently absent or incomplete for this old infrastructure. Over the past several decades, many sensing modalities, such ground penetrating radar (GPR), low-frequency electromagnetic fields, and hydro-vacuum excavation [
3,
4,
5], have been developed, each with its own benefits and drawbacks. For example, on one hand, GPR allows for non-invasive above-ground sensing of subsurface metallic and non-metallic structure detection, but it is limited by the geological environment and short penetration distance [
6,
7]. On the other hand, although low-frequency electromagnetic sensors are relatively immune to the geological noise, their detection depth is limited due to the secondary magnetic fields sharp decay. To overcome these mentioned limitations, currently, several techniques that require direct access to the utility, such as clamp induction and direct connection, are used in practice. While these techniques require access to the utilities, hydro-vacuum excavation has become increasingly popular. Invasive excavation methods are widely considered an extremely accurate technique for identification. However, it is also one of the least economical, with the hydro-vacuum rental alone costing over USD 2000/day [
5]. Thus, there is need for a fast, cost-effective, non-invasive sensing technology that does not require direct access to utilities for detecting and mapping aging underground infrastructures.
Much of the technology discussed in this paper has been studied previously. The problem has been looked at theoretically, and, for a handheld sensor, has been shown to work experimentally through different approaches [
2,
8,
9,
10,
11,
12,
13,
14,
15]. Most recently, in [
2] a new, handheld, triaxial, magnetic field gradiometer was introduced. However, in this paper, we assess the feasibility and applicability of using a drone-based LCS to detect, locate, and map underground metallic utilities, such as thin wires and pipes. In this paper, the system’s hardware and its integration to a UAS system are outlined and supplemented with the formulation of LCS theory and numerical and experimental data, as well as forward and inverse EMI models used for estimating the depth and orientation of targets.
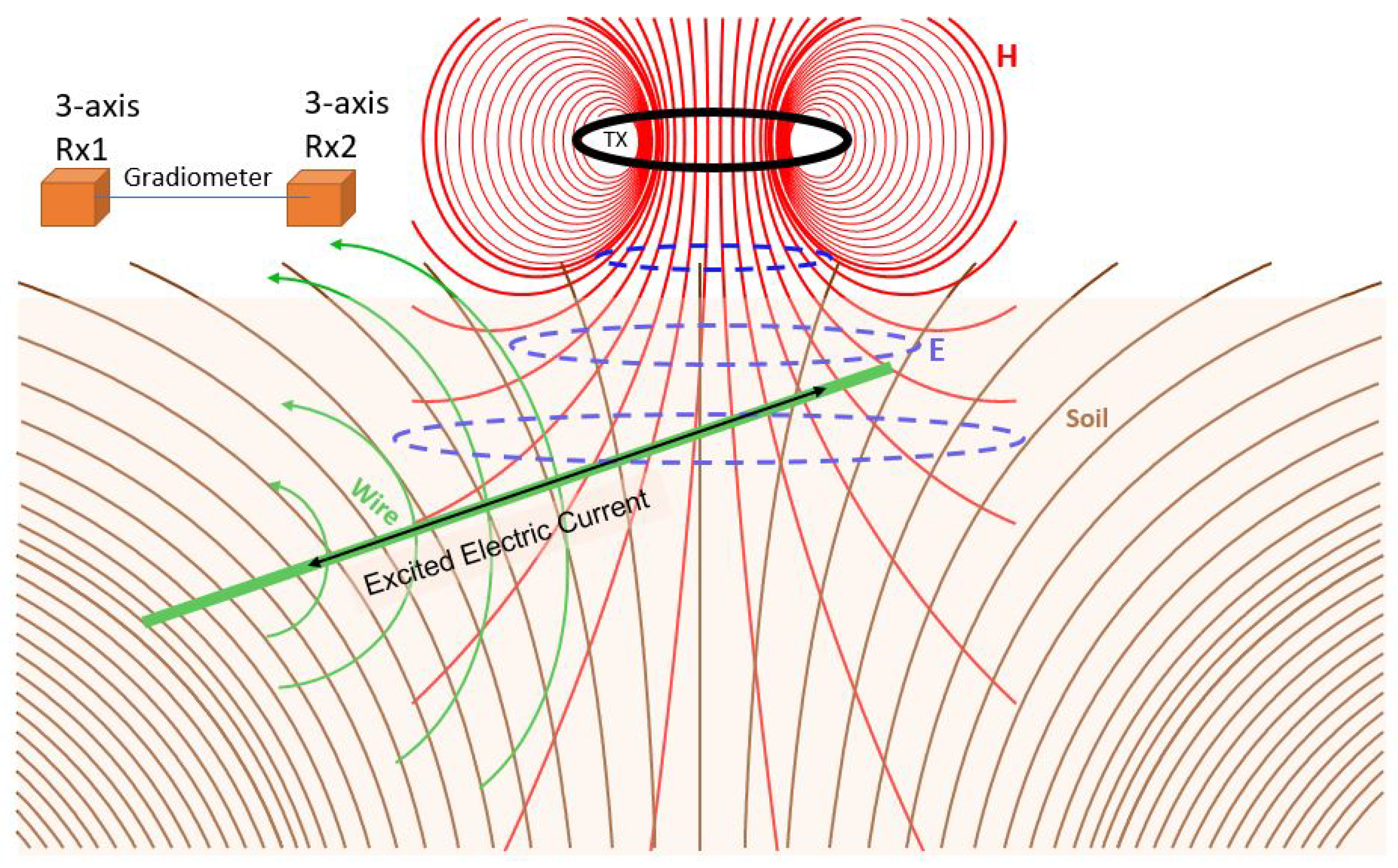
Our lightweight LCS system, with large standoff detection capabilities, is an ideal candidate to combine with a UAS for detecting and locating underground infrastructures. The LCS operates in the frequency range of 50 kHz–2 MHz, and uses an active transmitter current loop, i.e., a magnetic dipole, and/or signal of opportunity within our frequency of interest (such as AM radio stations) to produce a primary electric field parallel to the target’s main axis. As a result, the primary electric field excites a linear current on a target. This sensing technique has been proposed theoretically in [
14] and showed that a small active transmitter current loops provide enough primary electric field for long linear conductors depth to 8 m [
2]. There are many advantages to mounting the LCS gradiometer sensor to a UAS, such as reducing the time, cost, and effort needed to collect high-fidelity data over large areas compared to operating the system in a hand-carried mode; operating over challenging conditions such as topographic elevation changes, crevasses, and unstable, bumpy, or rocky terrain.
In the past, our group has demonstrated the ability to successfully develop lightweight EMI sensors capable of successfully detecting multiple targets while utilized on a UAS [
16], most notably, a sensor that is used for detection and classification of unexploded ordnances (UXO) and a second sensor that was developed for sensing soil conductivity. Both of these systems are shown mid-flight in
Figure 1.
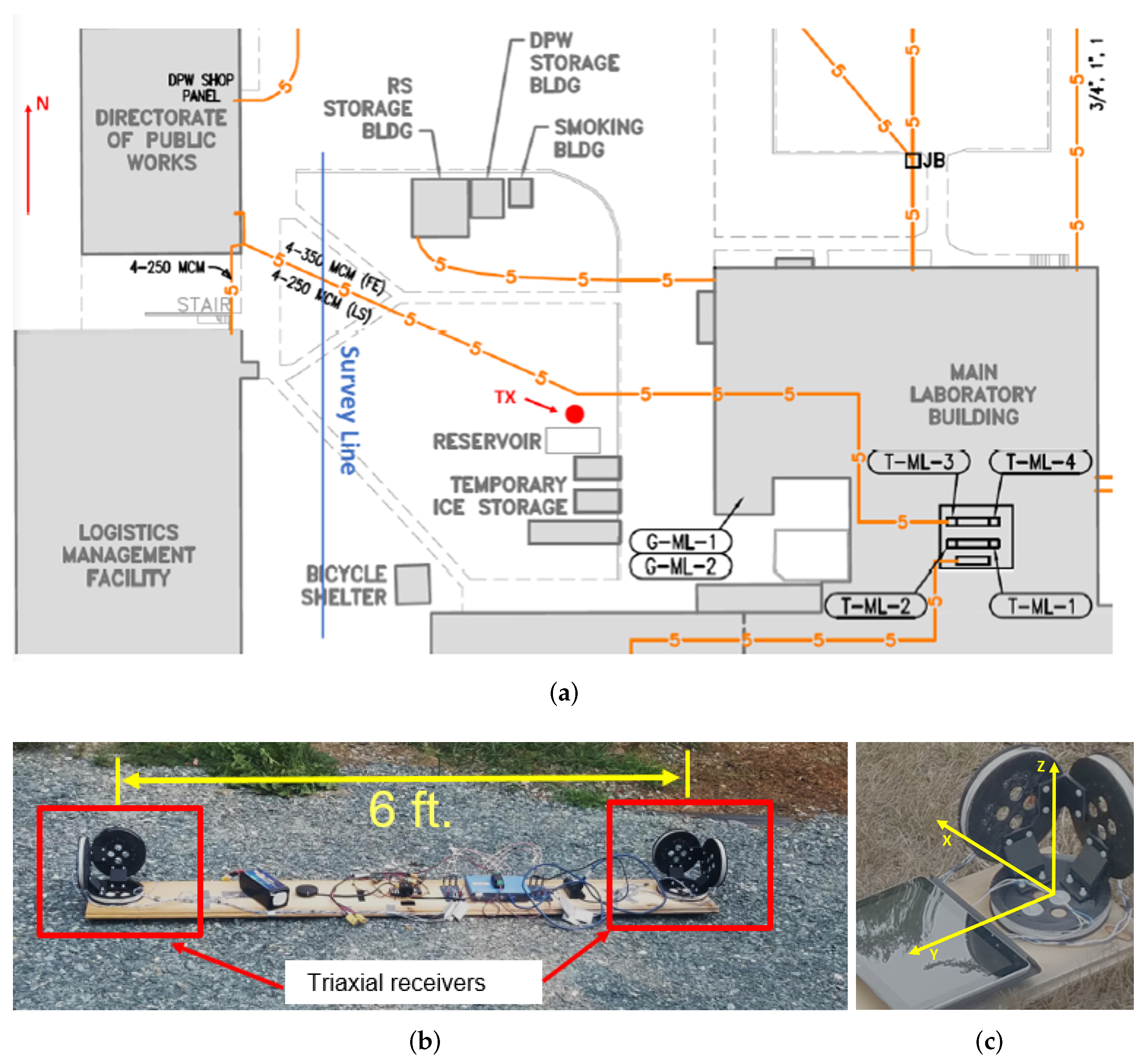
Originally, the LCS triaxial magnetic field gradiometer was designed, built, and tested for improving subsurface wire(s) detection and localization, as well as for estimating its depth and orientation. The gradiometer consists of a pair of triaxial sensors (that are three 15 cm diameter coils oriented along x, y, and z axes) placed 1.68 m apart along the y axis—see
Figure 2. The setup can measure the Cartesian magnetic field components (
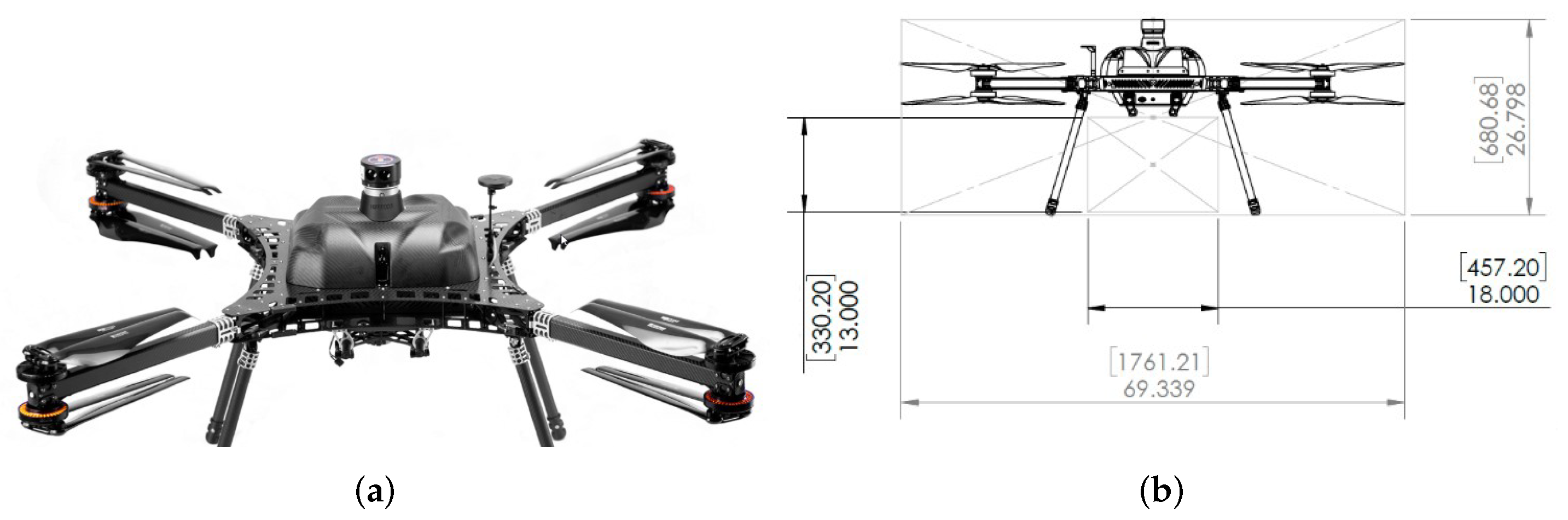
). Together, the two sets of triaxial receivers measure the vector magnetic field gradients in the x, y, and z directions. The data are acquired using an eight-channel 4000 series picoscope at 10 MSps. Due to its lightweight and superior standoff detection depth, the system was adapted to a UAS. The sensor is mounted to the Harris Aerial HX8, which is an octorotor configuration UAS with a primarily carbon fiber and aluminum frame with a payload capacity of approximately 8 kg (17.6 lbs). The HX8 can be seen in
Figure 3.
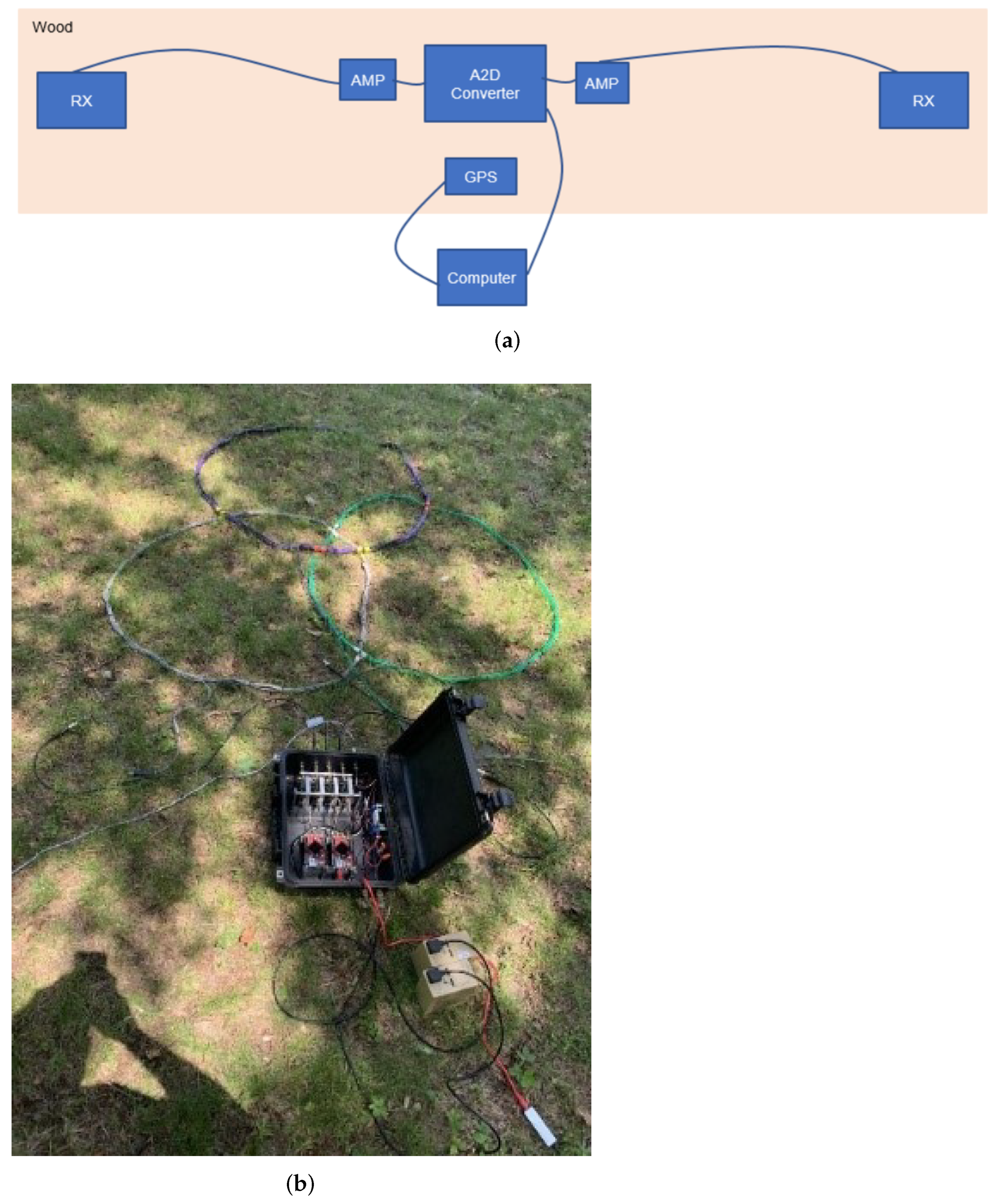
In the current configuration, all electronics are mounted on a single wooden board. A 3D rendering of the sensor with suspension hooks and dimensions measurements is shown in
Figure 2. The sensor weight is approximately 14 lbs, which is well within the aircraft’s payload maximum. The electromagnetic signals due to the UAS motors and high currents are mitigated by separating a distance between the UAS and the sensor, as suggested in [
17]. Namely, to eliminate noise the sensor is suspended beneath the UAS using tethers of 12 feet. The four individual tethers are used to minimize pendulum swinging effects. Custom-made crossbeams are fixed to the landing gear of the UAS. The crossbeams provide tether points between the sensor platform and UAS. The sensor is powered by its own six-cell lithium polymer battery, producing a nominal 24 V. The battery provides an approximate run time of 30 min. A 3D-rendered model of the LCS triaxial gradiometer sensor mounted on the UAS mounted is shown on
Figure 2.
As discussed above, there are many advantages to mounting subsurface sensors onto a UAS. However, there are several drawbacks to be considered as well. The most obvious drawback is operating the system in an environment not well suited for flying, such as a heavily urbanized or wooded area. A hand-carried or an unmanned ground vehicle mounted sensor might be more appropriate for such an environment. A secondary drawback of a UAS-mounted sensor is the standoff distance. With a UAS there are serious limitations and considerations that must be accounted for when determining how close the sensor will be to the ground. These considerations often require the sensor to maintain a larger standoff distance from the ground than a system that is hand-carried or mounted to an unmanned ground vehicle.
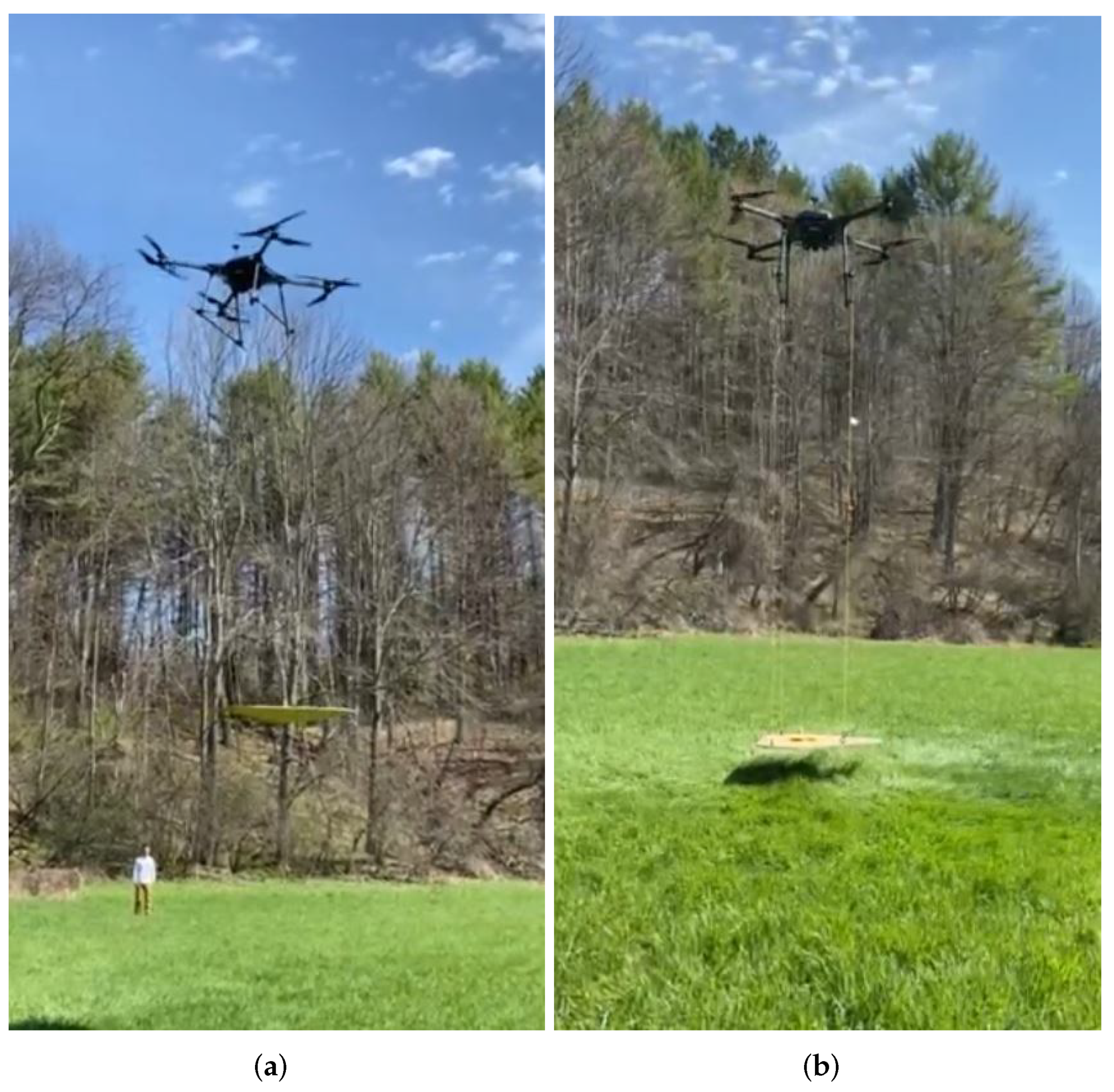
Determining the standoff required by the UAS for safe maneuvering is difficult to pinpoint. Moving while maintaining a low altitude becomes complicated, especially when the surface elevation changes or there are obstructions such as rocks. In order to study this, we built a mock platform of our sensor made entirely of plywood and foam. The platform was used to test the drone’s ability to hover at low altitudes as the weight of the payload changed. Testing was completed with just the mock platform at 10 lbs, then an additional 2.5 lbs, and finally an additional 5 lbs. The testing is shown in
Figure 4 and incorporated both maneuverability and low-altitude hovering. Based on this testing, we speculate that for ideal conditions (flat terrain), we should be able to fly around while maintaining a standoff of approximately 1.5 m. However, as a survey site becomes increasingly more complex, the more conservative our standoff distance will need to be.
4. Results
This section shows experimental and numerical data of the LCS for different linear conductors placed under different environmental conditions. It was proven to be able to reliably detect and invert for key parameters for these scenarios. Our first data collection, shown in
Figure 13, was over the top of an environment that had both concrete and grass. The gradiometer sensor was hand-carried over a pair of buried power cables multiple times. An active transmitter current loop, operating at 200 kHz, was used to excite the targets.
Figure 13a shows a heat map of the detection data collected as a function of the system’s GPS movements. With red correlating to a large increase in signal, a target is detected for each survey line. Although the system allows to estimate the target’s orientation by collecting data along multiple lines, collecting each additional survey line data increases time, effort, cost, and potential safety concerns, which, in return, makes the system impractical.
Figure 13b shows a plot of the magnitude data for all six receivers, that is, one triaxial receiver, set one, with components
(shown in red) and a second triaxial receiver, set two, with components
(shown in blue). The green line plots the magnitude of the front RX subtracted by the magnitude of the back RX.
Shown in
Figure 14 is our second data collection. This location was over the top of a wet grassy environment. Multiple thin 18 AWG wires were laid out parallel to each other approximately 2 m apart. Each wire was a different length. The simultaneous transmitter current loops from
Figure 12b were used to excite the targets. Once again, the gradiometer sensor was hand-carried multiple times over the wires by two users. As can be seen from
Figure 14b, the survey line crossed the wires at different angles. In order to take advantage of the live time data acquisition, a display was mounted on top of the system.
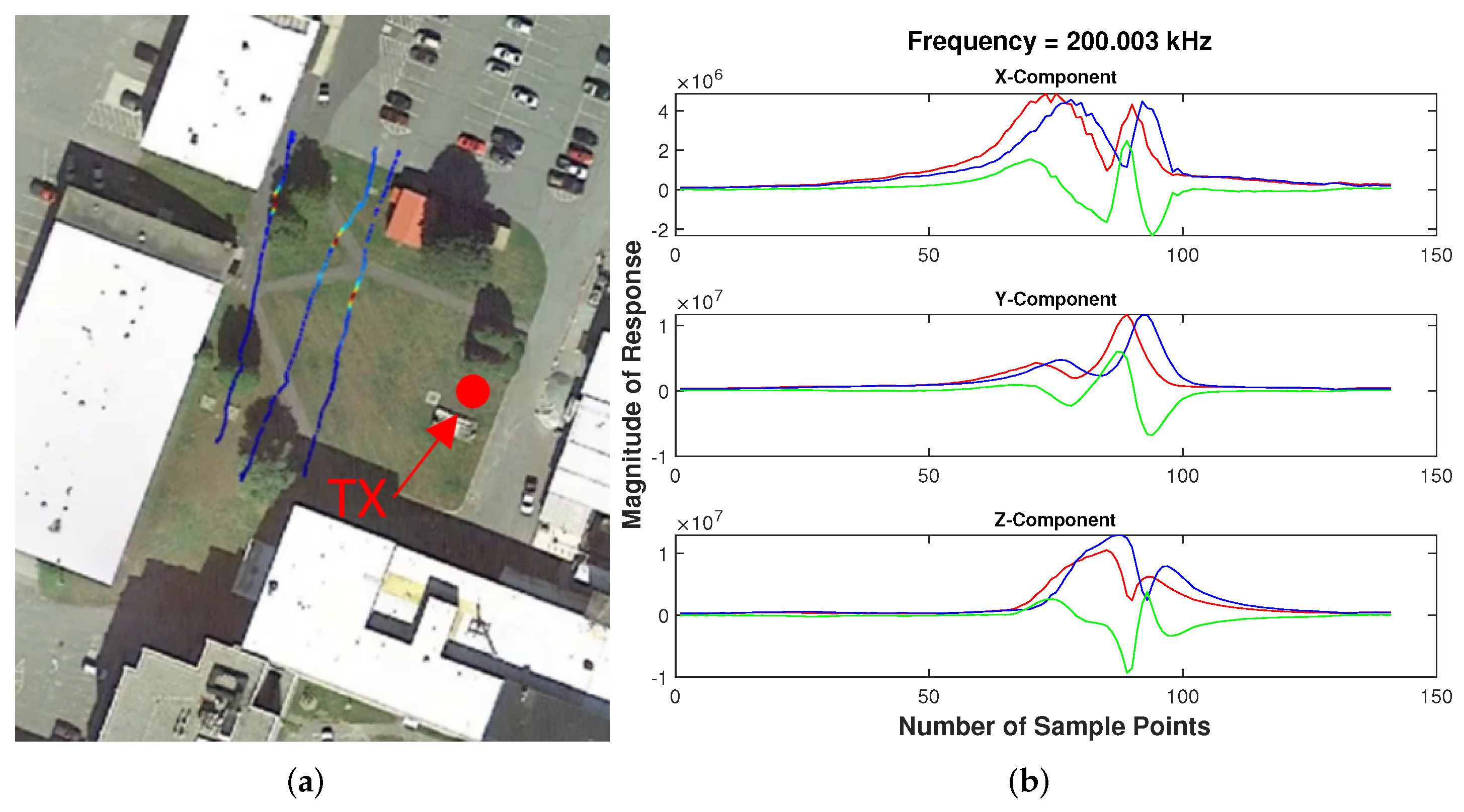
Our third data collection site was completed over the top of a concrete environment.
Figure 15a shows an overhead view of the survey sight. For this figure, the blue line shows the survey line in which the sensor was carried. The red dot shows the approximate location of the 200 kHz TX coil. During this data collection, the gradiometer sensor was carried over a utility pipe that was buried in concrete. Similar to the system shown in
Figure 12b, a single-coil field-portable magnetic dipole operating at 200 kHz was able to excite the target. Furthermore, in addition to the vertical magnetic dipole (transmitter current loop), the target was excited by existing EM fields. In this instance, two AM radio stations operated at 1390 kHz and 1270 kHz. The detection for both AM radio stations were extremely similar. Results for 1390 kHz are shown in
Figure 15b. For this figure, red and blue lines show the response from the front and back RX, respectively. The green line plots the magnitude of the front RX subtracted by the magnitude of the back RX. Results for all three Cartesian coordinates are shown, with a clear detection of a utility pipe seen. Both AM radio towers were located within a radius of the target of approximately 10–12 miles. These EM fields were selected through the same algorithm that was discussed earlier in
Section 3.2. It should be noted that the results plotted in
Figure 15b do appear to be more noisy than results obtained via the active TX coil. However, a clear detection of a utility pipe can still be seen, and data were shown to be consistent with the active TX coil.
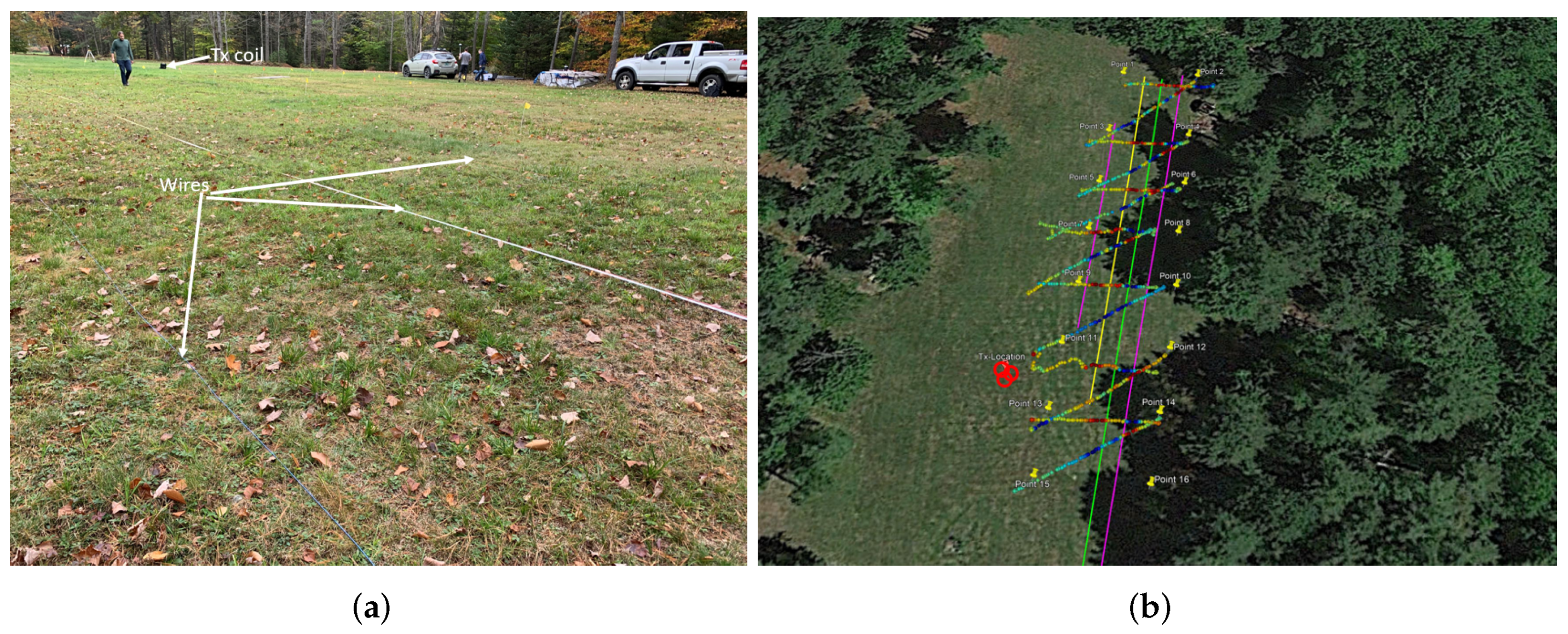
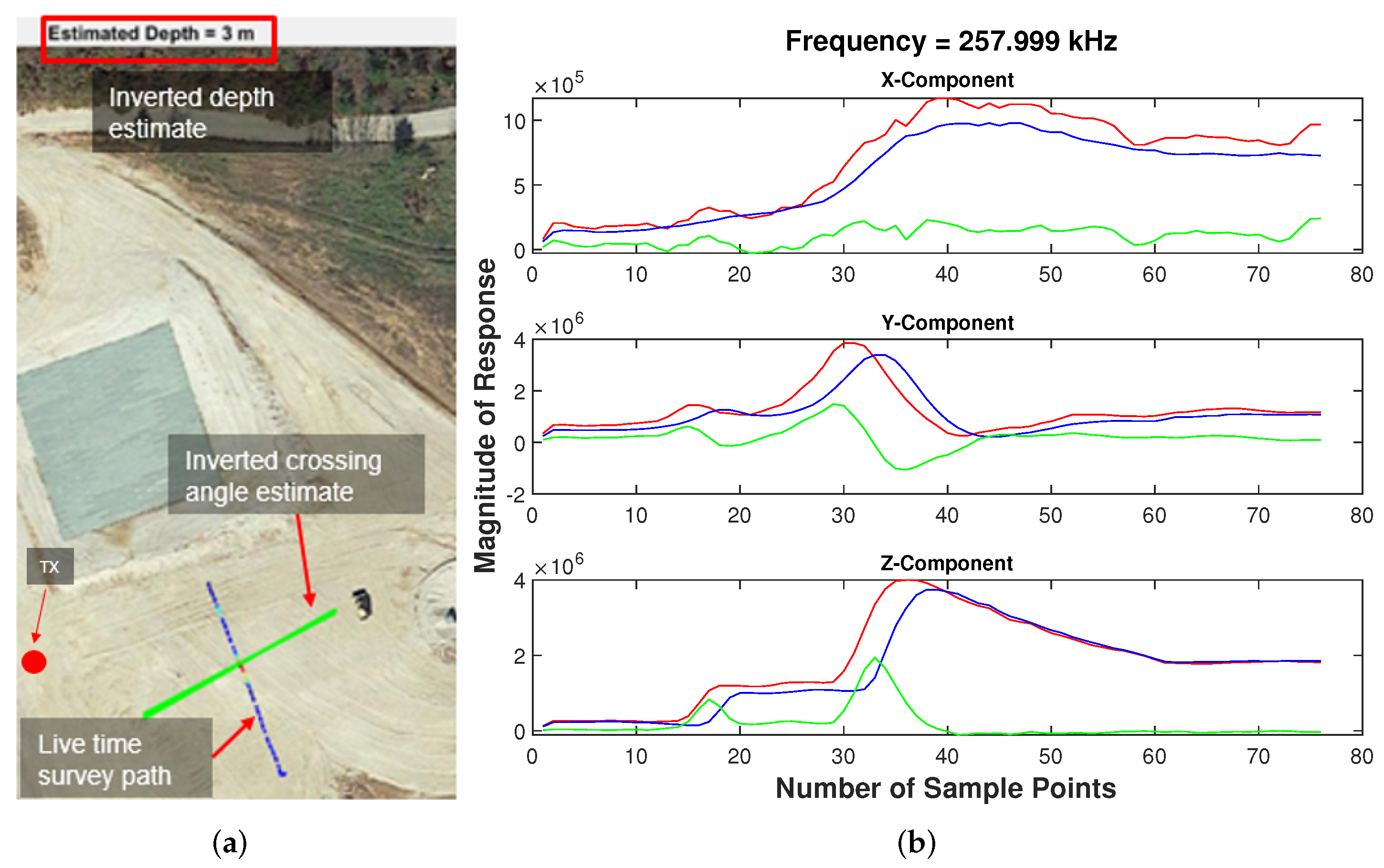
The fourth collection site was a dry, grass-free environment. The gradiometer system was carried over two buried wires that were spaced several meters apart. Once again, the simultaneous vertical magnetic dipole transmitter, shown in
Figure 12b, was used to excite the targets.
Figure 16a shows an overhead view of the fourth survey site. In this figure, the real-time detection heat map shows the survey line where the sensor was carried. The data were inverted using single and multi-wire inversion algorithms described in [
2]. Inverted estimated crossing angle of the buried wire using a single wire inversion code is shown with a green line in
Figure 16a. Inverted estimated depth of the buried wire was 3 m and this is shown at the top of the photograph. Both the crossing angle and depth inversions were found to be consistent with known ground truth. Data for the three frequencies transmitted by our vertical magnetic dipole were collected during a single survey line. Detection plots for the three frequencies, 66.7 kHz, 158 kHz, and 258 kHz, look extremely similar. Results for 258 kHz are shown in
Figure 16b. Results for all three Cartesian coordinates are shown with a clear detection of the target seen. Red and blue lines plot the response from the front and back RX, respectively. The green line plots the magnitude of the front RX subtracted by the magnitude of the back RX. For each frequency, the data were used to invert for an estimated depth and crossing angle. Both of these parameters were found to be consistent with known ground truth.
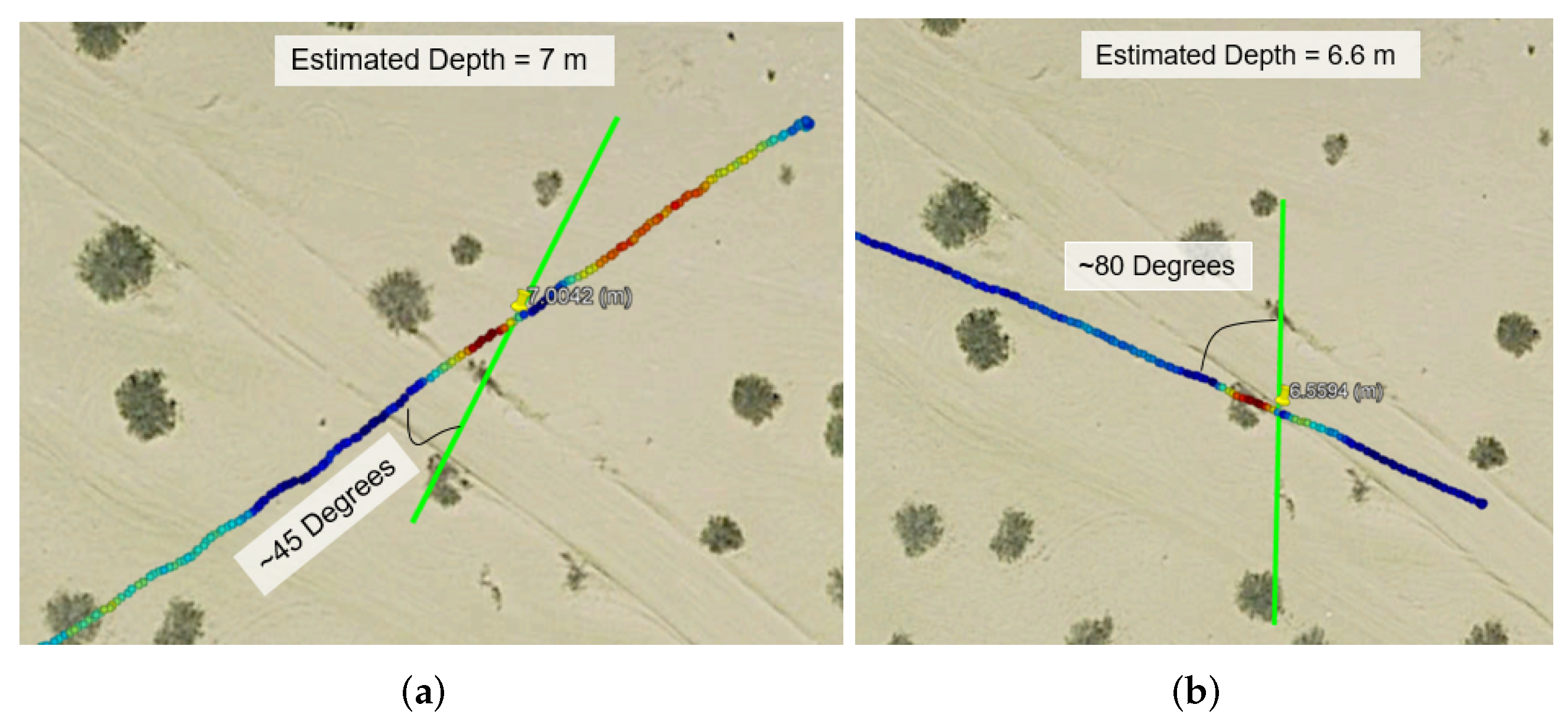
Testing was also completed in order to quantify how well the inversion was able to handle crossing a target at different angles. An extension cord was buried approximately 6–8 m deep. The gradiometer sensor was carried over the same target at multiple angles. That is, the survey line taken changed but the location of the target did not. The detection, inverted orientation, and inverted depth are shown in
Figure 17 at both 45
and 80
. By comparing the two figures, it can be seen that both survey lines produced similar inversion depth estimates and inversion orientation estimates. Both of these inversion estimates are within 10
of each other. Results were found to be consistent with known ground truth, which is approximately the average of the two inversion results.
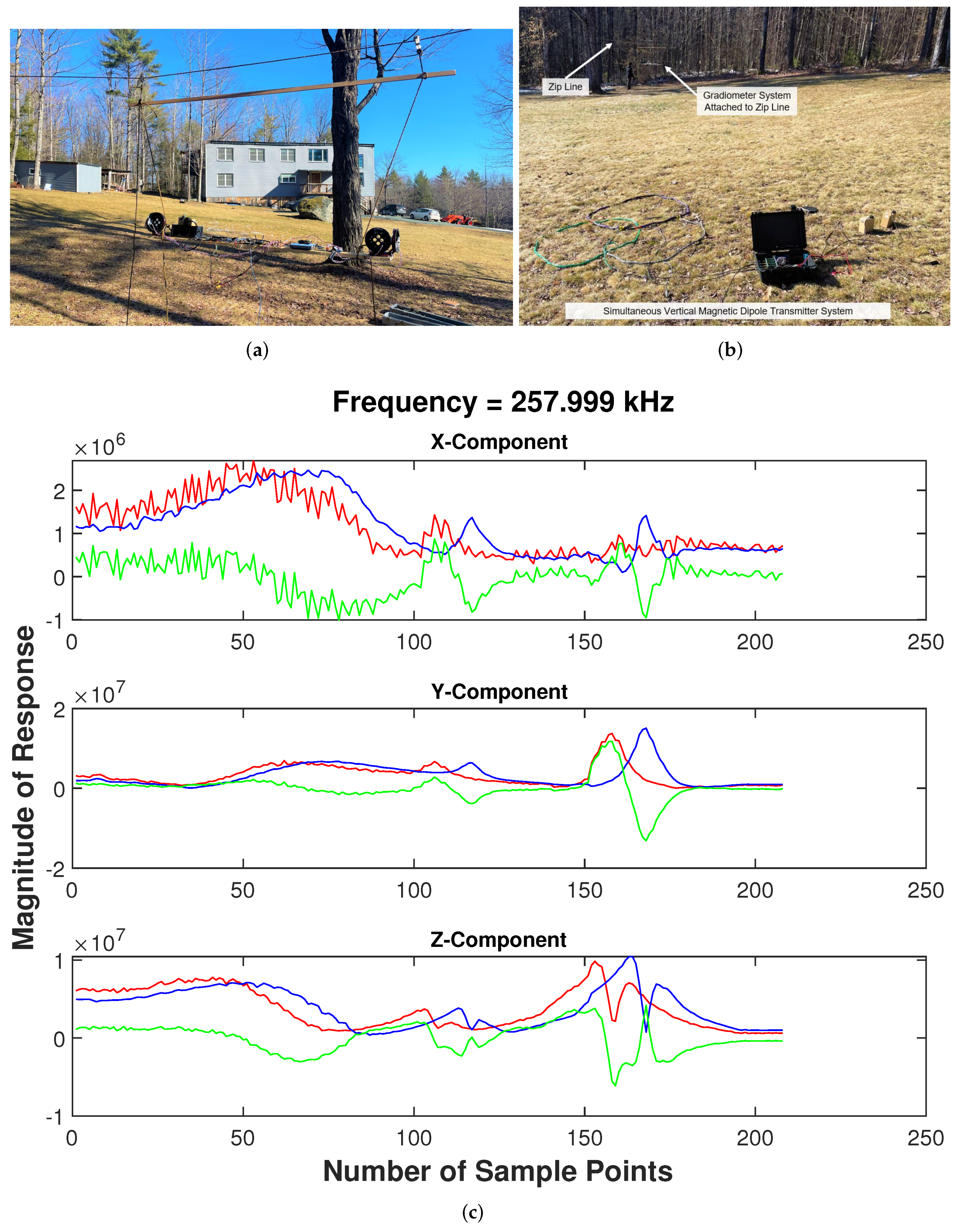
The triaxial LCS gradiometer sensor was tested extensively in hand-carry modes. The results demonstrated feasibility of the LCS for detection and mapping deep targets without direct access to the target. The LCS data processing algorithms are able to invert key parameters such as depth and orientation targets. In order to further validate applicability of the system on UAS as a first step, the gradiometer sensor was mounted on a zip line and it conducted data collection. The zip line requires no human interaction to operate as intended. Photographs of the gradiometer sensor attached to a constructed zip line are shown in
Figure 18. The placement and setup of the vertical magnetic dipole transmitter system are shown in the foreground of
Figure 18b with the zip line in the background. The gradiometer system is attached to the zip line in this figure.
Representative data are shown in
Figure 18c. Data for the three frequencies transmitted by our vertical magnetic dipole system were collected during a single survey line. Detection plots for the three frequencies, 66.7 kHz, 158 kHz, and 258 kHz, look extremely similar. Therefore, only results for 258 kHz are shown in
Figure 18c. For this figure, red and blue lines show the response from the front and back RX, respectively. The green line plots the magnitude of the front RX subtracted by the magnitude of the back RX. Results for all three Cartesian coordinates are shown. These data show three distinct rises above the noise. The rise farthest to the right is an electrical power line buried in the soil. The rise seen in the middle of the data is a 230 ft extension cord lying on the ground.
5. Discussion
Preliminary studies demonstrated that the LCS can detect and map deeply buried underground infrastructures, and the system is adaptable to UAS. There are many advantages to mounting the system onto a drone as opposed to hand-carrying it. First, by adapting our sensor to be deployed via UAS, the time and effort needed to collect data over large areas is significantly lower than what is required for a hand-carried system. Second, the UAS-based system will reduce time, effort, and cost associated with data collection over large areas. Third, operating the hand-carried system over challenging terrain is difficult, and in some extreme situations, impossible. A UAS-deployed system allows traversing these areas to be not only possible, but significantly safer as well. Any safety concerns that would be associated with the rough terrain would pose virtually no threat to a UAS-mounted system. However, one potential factor that could limit the UAS-based LCS operation could be the standoff distance of the sensor.
Therefore, to better understand the impact that increased standoff distances have, modeled EM signals from a buried wire using the thin-wire MOM numerical model code were studied [
24]. For analysis, we introduced the signal-to-transmitter ratio (STR), which is a similar metric to signal-to-noise ratio (SNR). As discussed in
Section 3 and shown in
Figure 7, the total measured signal is a sum of the primary field (transmitter), secondary field (target), and soil. For LCS application, our goal is to maximize the secondary field from the target and to minimize contribution from the primary field and response from soil.
We define the
to be a ratio of signal power such that [
13]:
where
the signal measured from the secondary field (target) and
the signal measured from the primary field (transmitter).
It might be assumed that STR can be changed by altering the gain of the transmitter or receiver coils. However, since the magnitude of the response from the secondary field (target) is proportional to the magnitude of the primary field (transmitter), this is an incorrect assumption. Therefore, although it is easy to change the gain of either the transmitter or receiver coils, the STR will remain the same and is dependent on other properties [
13]. These properties include the geometric layout, such as target length, depth, and orientation, as well as excitation frequency, transmitter location, and soil conductivity.
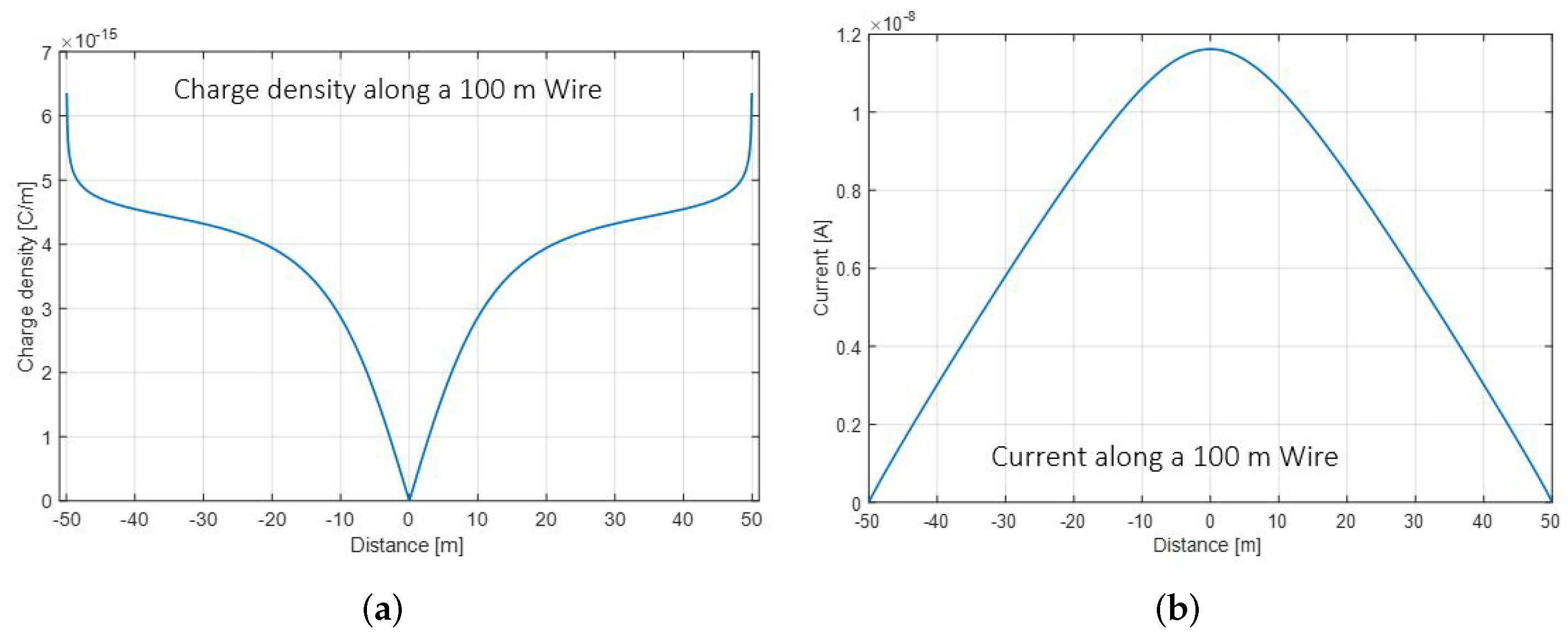
The numerical calculations were performed for a target of 1 m deep, 100 m in length, an excitation frequency of 100 kHz, a soil conductivity of 1 mS/m, and a transmitter standoff of 10 m in both the
x and
y directions, with a survey line that is perpendicular to the target. This geometry is extremely close to what is shown in
Figure 10. However, in this scenario, the target is buried 1 m deep as opposed to 8 m. Additionally, the distance in the
z-
between the survey path and buried target is varying.
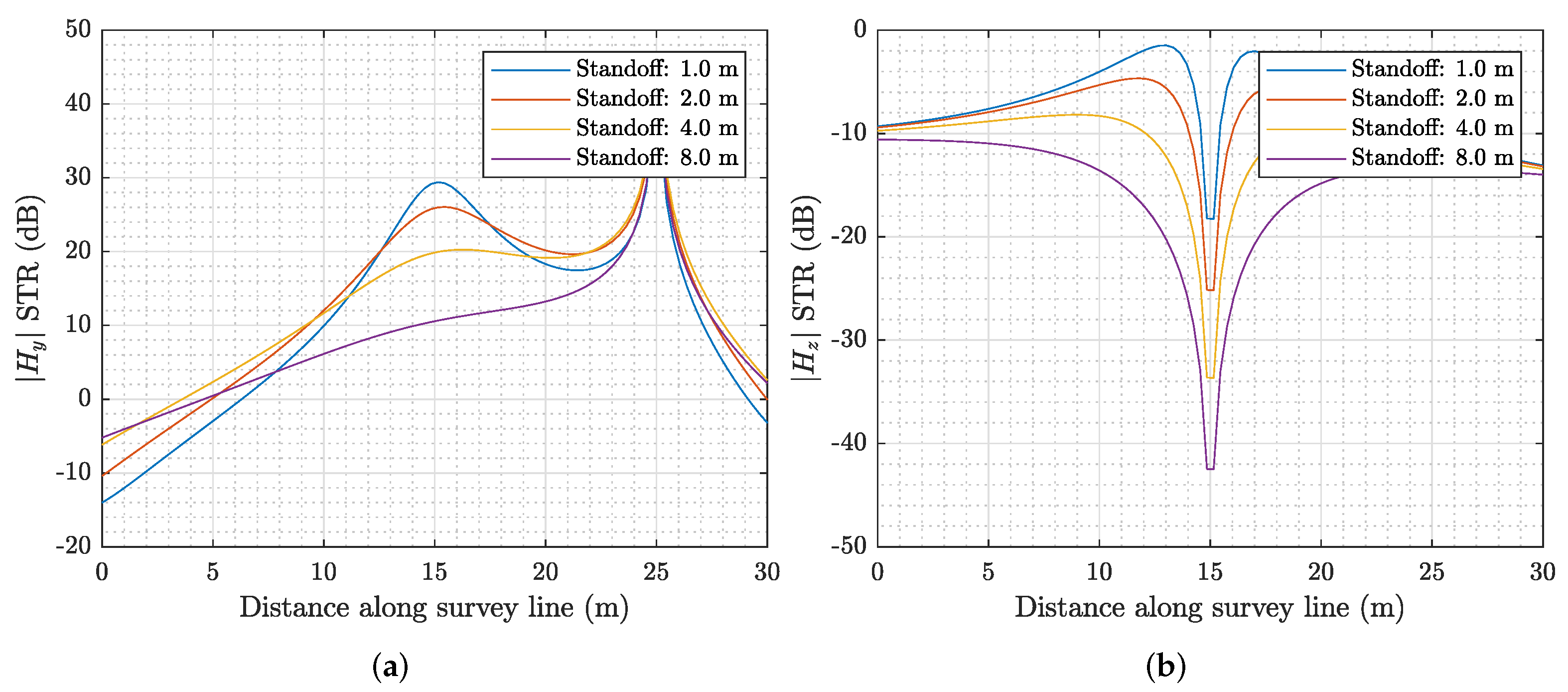
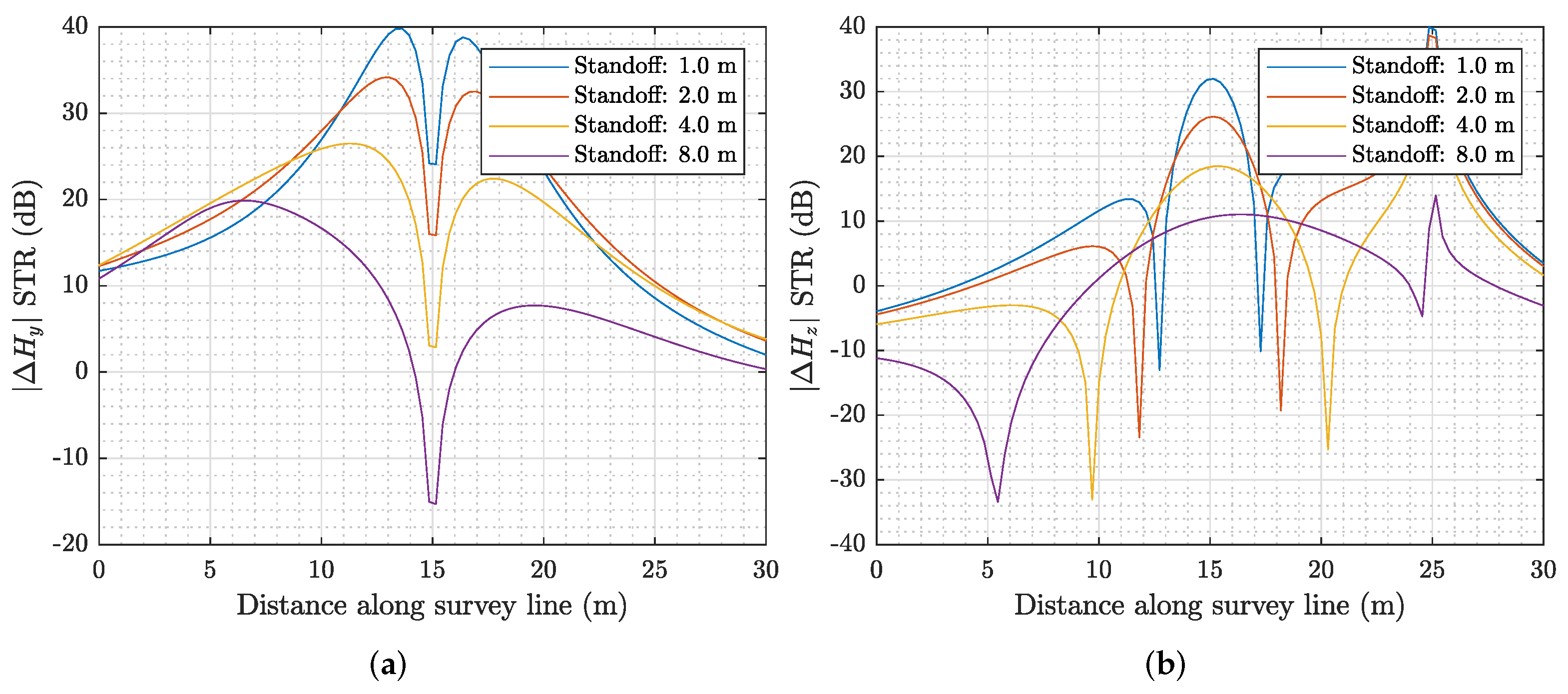
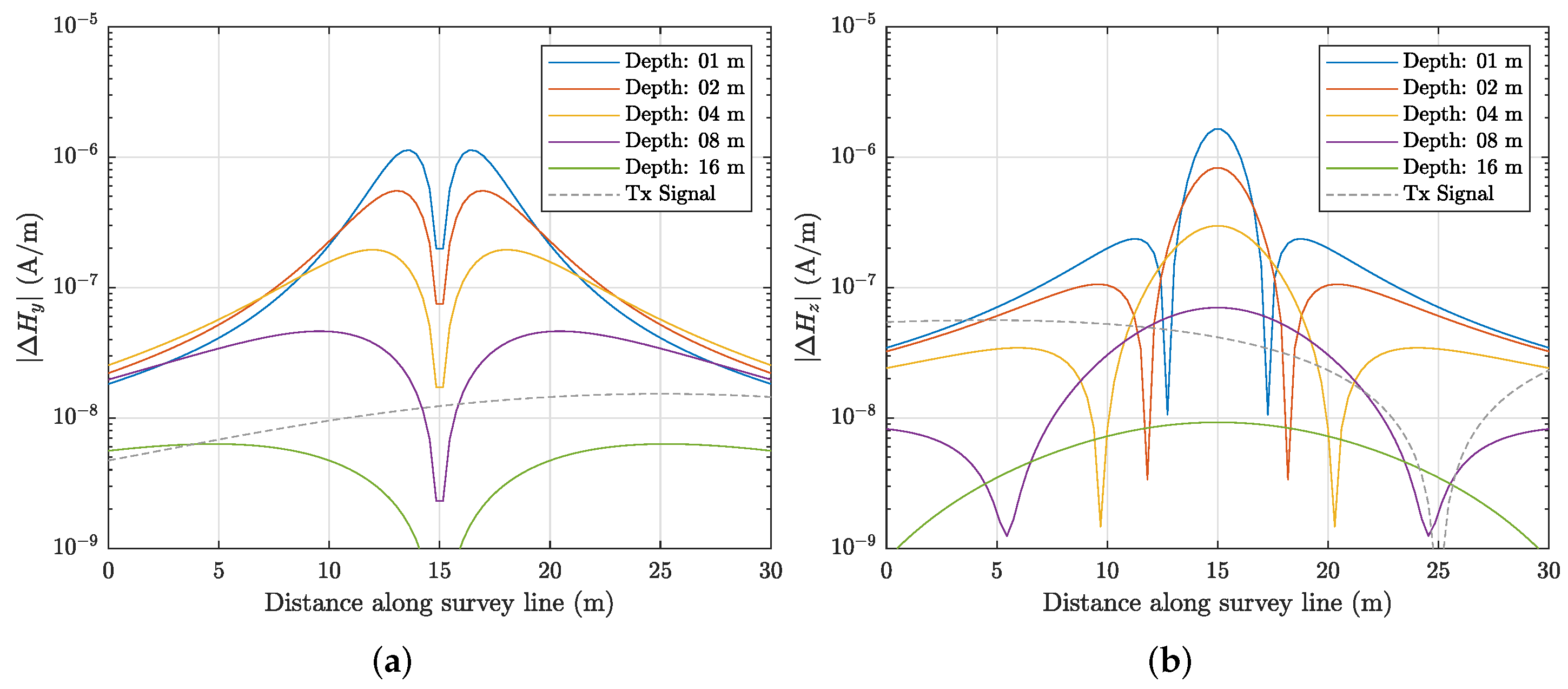
Figure 19 and
Figure 20 plot the STR results of the
and
component as a function of sensor standoff distance.
Figure 19 is the absolute signal, whereas
Figure 20 is the gradiometer (difference) signal. The standoff distances range from 1 m to 8 m. The standoff distance refers to the height at which the sensor is above the ground. On the other hand, the depth of the target below the soil does not change and remains fixed at 1 m. The STR value that is needed such that a target can be detected is discussed in [
13]. The analysis concludes that although the concept should be examined in more detail, it is reasonable to believe that an STR around 10 dB will equate to feasible detection of a target and 20 dB equates to very easy detection of a target. From
Figure 20 we can see that our largest STR occurs for the
component. A sufficiently large area of this STR signal occurs above 20 dB for three of the four standoff distances modeled. Standoff distances of 1 m, 2 m, and 4 m all fit this criteria. An 8 m standoff does not fit this criteria, although the signal level is well within the 10–20 dB range.
6. Conclusions
In this paper, we investigated the feasibility of using a linear current sensing (LCS) technique integrated on an unmanned aerial system (UAS) for detecting and mapping underground infrastructures fast and cost-effectively. The theoretical bases of EMI sensing modalities along with supporting data are presented. A surrogate LCS platform was built and attached to the drone. The system was tested to assess the drone’s ability to hover at low altitudes at different payload weight. The studies demonstrated that the drone can carry and hover the LCS at low altitude, and can provide high-fidelity data to fully characterize subsurface infrastructure.
The numerical studies were performed for a long buried wire. The gradients of the total magnetic fields were analyzed for different standoff distances. These numerical results, along with the carried drone’s maneuverability testing, illustrate the feasibility of using an LCS technique integrated on UAS for detecting and mapping underground infrastructures fast and cost-effectively.
There are many advantages to mounting the LCS gradiometer sensor to a UAS, such as reducing the time and effort needed to collect high-fidelity data over large areas compared to operating the system in a hand carried mode; operating over challenging conditions such as topographic elevation changes, crevasses, and unstable, bumpy, or rocky terrain. In order to fully uncover the pros and cons of the LCS gradiometer sensor mounted on a UAS, in the future work, we will collect and analyze actual LCS data over buried infrastructure at different elevations and different flight speeds.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}