
An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR


Abstract
:1. Introduction
2. Raw Data Generation
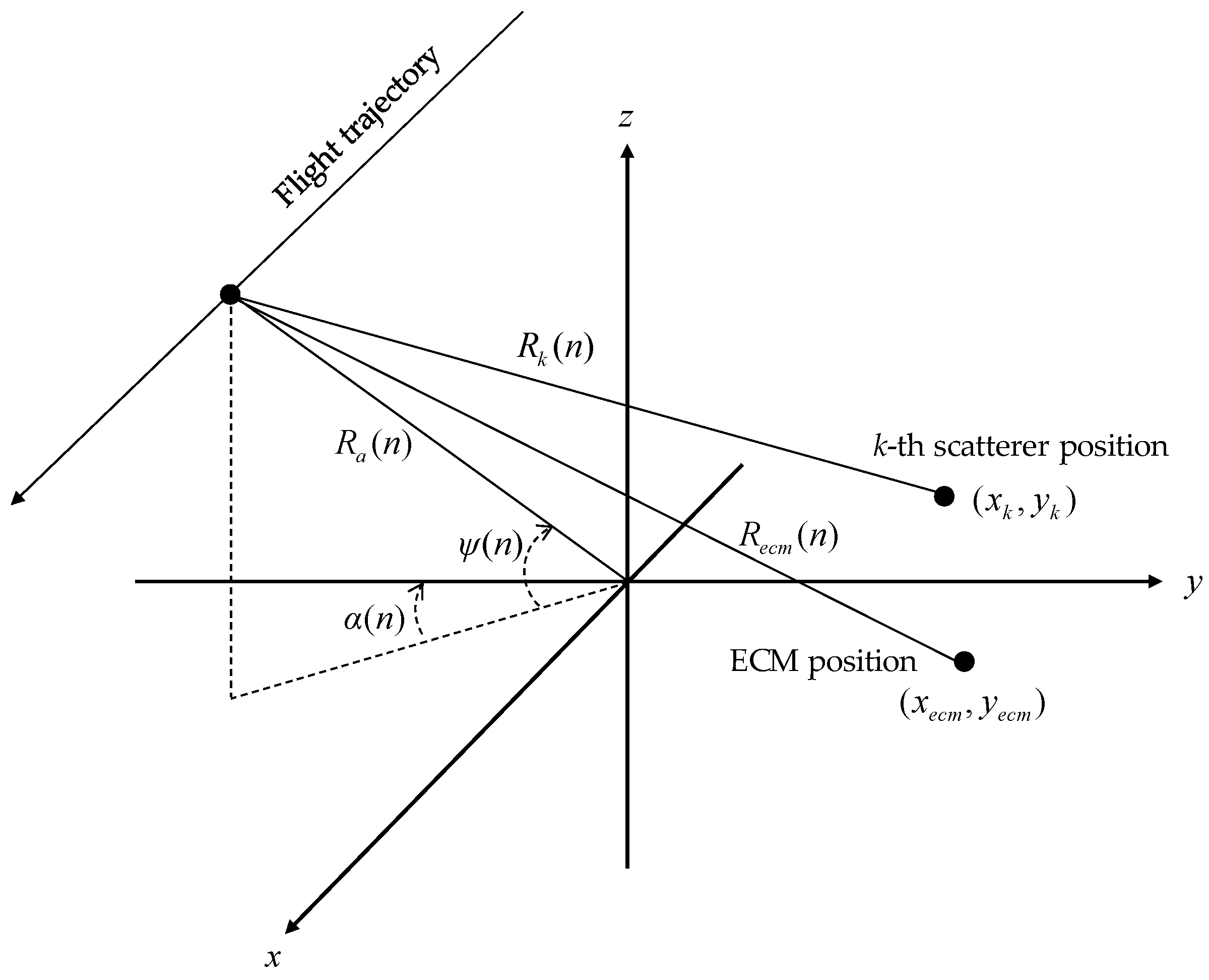
2.1. Reflected Echo Signal
2.1.1. Derivation of the Reflected Echo Signal Model
2.1.2. Generation of the Reflectivity Map
2.2. Jamming Signal
2.2.1. Received Jamming Signal Model
- 2.
- False target jamming (FTJ): FTJ is a type of deceptive jamming used to generate the false targets in an arbitrary position in SAR images [46,47,48,49,50]. To generate the false targets, the received jamming signal should have a similar form to the signals reflected from real scatterers, which can be achieved through the following equation:
2.2.2. Jamming Equivalent Sigma Zero
2.3. Signal Received from SAR Antenna
3. Signal Processing
3.1. Pulse Compression
3.2. Image Formation
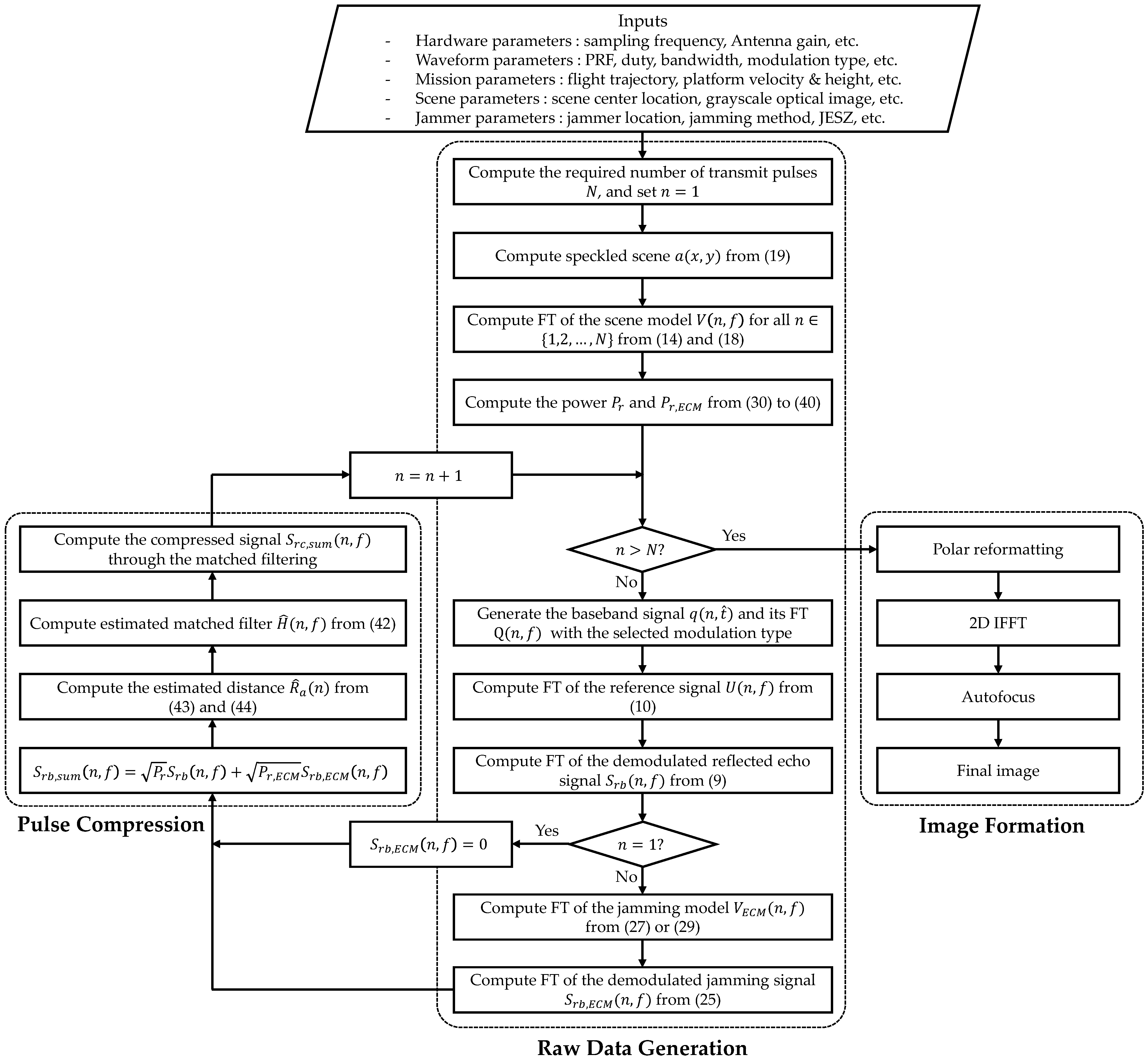
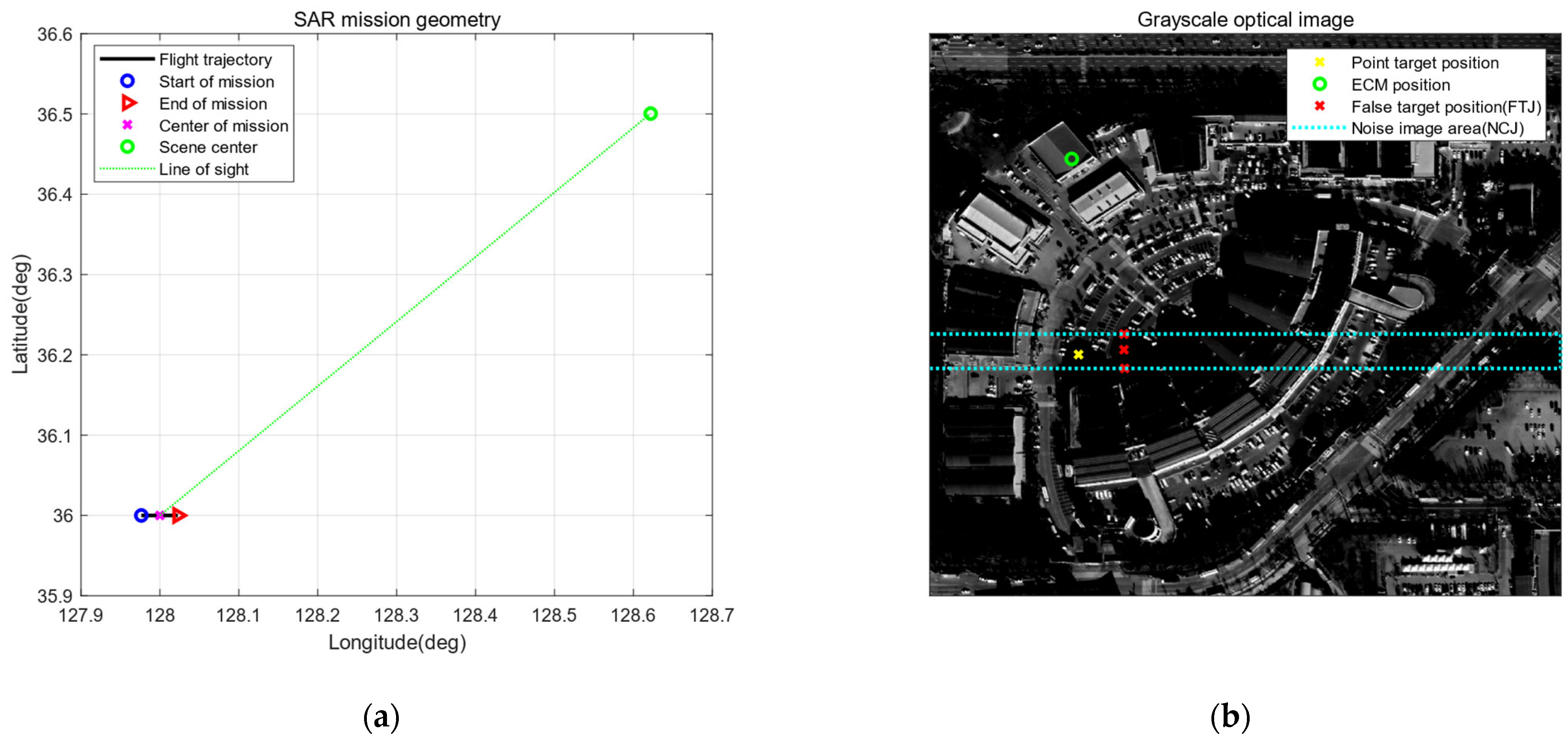
4. Simulator Structure and Simulation Results
4.1. Inputs for the Simulator
4.2. Raw Data Generation and Pulse Compression
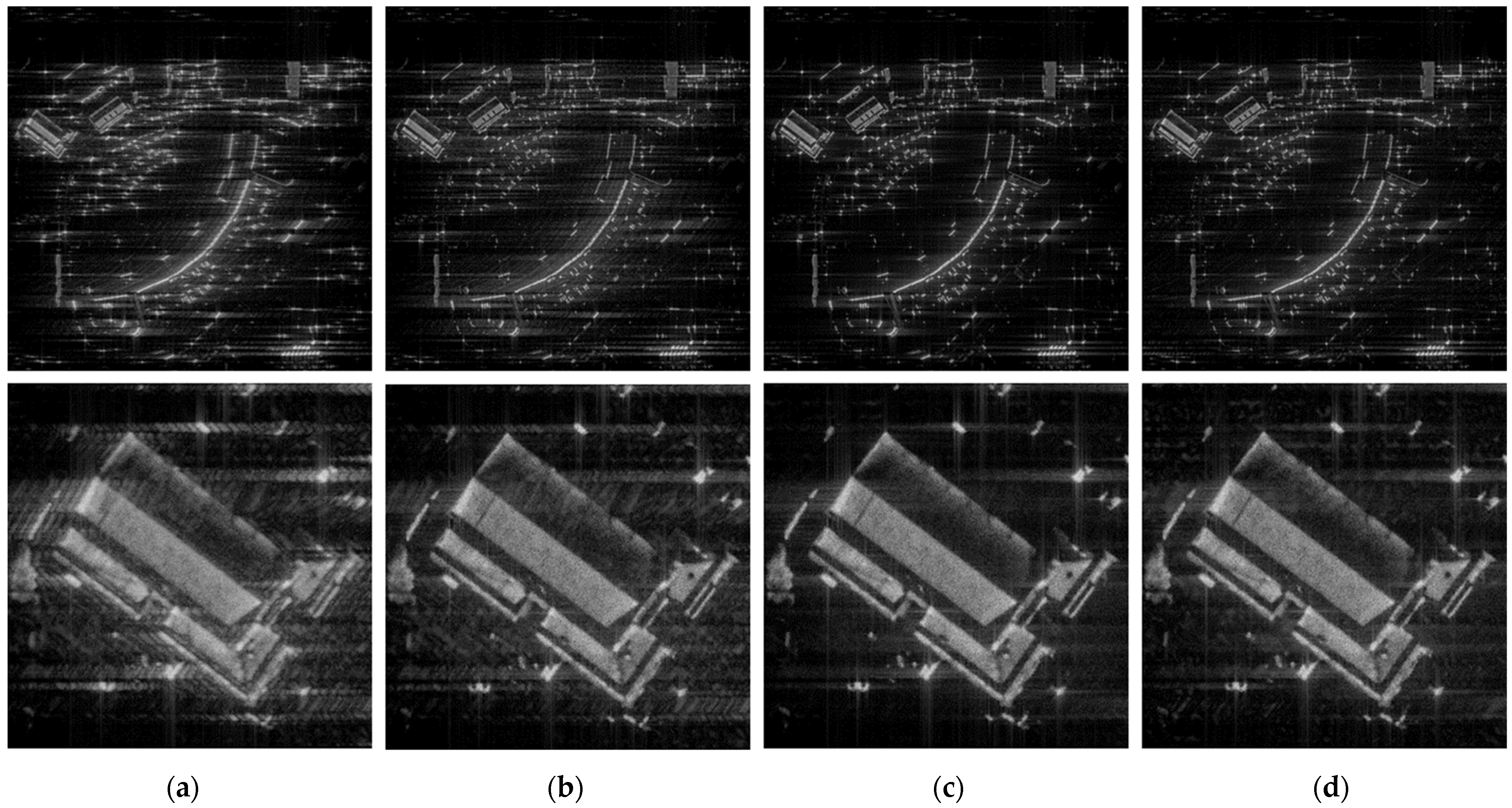
4.3. Image Formation
4.3.1. Images with Motion Measurement Errors
4.3.2. Images with the Jamming Signals
4.3.3. Discussion of the Simulation Results concerning the JESZ
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Jansing, E.D. Introduction to Synthetic Aperture Radar: Concepts and Practice; McGraw-Hill Education: New York, NY, USA, 2021. [Google Scholar]
- Oliver, C.; Quegan, S. Understanding Synthetic Aperture Radar Images; SciTech Publishing: Noida, India, 2004. [Google Scholar]
- Franceschetti, G.; Iodice, A.; Migliaccio, M.; Riccio, D. A novel across-track SAR interferometry simulator. IEEE Trans. Geosci. Remote Sens. 1998, 36, 950–962. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, C.; Li, W.; Hu, W.; Wang, P.; Li, H. A Deep Collaborative Computing Based SAR Raw Data Simulation on Multiple CPU/GPU Platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 387–399. [Google Scholar] [CrossRef]
- Zhang, F.; Yao, X.; Tang, H.; Yin, Q.; Hu, Y.; Lei, B. Multiple Mode SAR Raw Data Simulation and Parallel Acceleration for Gaofen-3 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2115–2126. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, C.; Li, W.; Hu, W.; Wang, P. Accelerating Time-Domain SAR Raw Data Simulation for Large Areas Using Multi-GPUs. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3956–3966. [Google Scholar] [CrossRef]
- Li, Z.X.; Su, D.D.; Zhu, H.J.; Li, W.; Zhang, F.; Li, R.R. A fast synthetic aperture radar raw data simulation using cloud computing. Sensors 2017, 17, 113. [Google Scholar] [CrossRef]
- Rahmanizadeh, A.; Amini, J. An integrated method for simulation of synthetic aperture radar (SAR) raw data in moving target detection. Remote Sens. 2017, 9, 1009. [Google Scholar] [CrossRef]
- Guo, Z.; Fu, Z.; Chang, J.; Wu, L.; Li, N. A Novel High-Squint Spotlight SAR Raw Data Simulation Scheme in 2-D Frequency Domain. Remote Sens. 2022, 14, 651. [Google Scholar] [CrossRef]
- Franceschetti, G.; Migliaccio, M.; Riccio, D.; Gilda, S. SARAS: A synthetic aperture radar (SAR) raw signal simulator. IEEE Trans. Geosci. Remote Sens. 1992, 30, 110–123. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Z.; Deng, Y. Squint spotlight SAR raw signal simulation in the frequency domain using optical principles. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2208–2215. [Google Scholar] [CrossRef]
- Luo, Y.; Song, H.; Wang, R.; Deng, Y.; Zheng, S. An accurate and efficient extended scene simulator for FMCW SAR with static and moving targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1672–1676. [Google Scholar]
- Khwaja, A.; Ferro-Famil, L.; Pottier, E. SAR raw data generation using inverse SAR image formation algorithms. In Proceedings of the IEEE International Symposium on Geoscience Remote Sensing, Denver, CO, USA, 31 July 2006. [Google Scholar]
- Khwaja, A.S.; Ferro-Famil, L.; Pottier, E. Efficient SAR raw data generation for anisotropic urban scenes based on inverse processing. IEEE Geosci. Remote Sens. Lett. 2009, 6, 757–761. [Google Scholar] [CrossRef]
- Liu, B.; He, Y. SAR Raw Data Simulation for Ocean Scenes Using Inverse Omega-K Algorithm. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6151–6169. [Google Scholar] [CrossRef]
- Deng, B.; Qing, Y.; Li, H.W.X.; Li, Y. Inverse frequency scaling algorithm (IFSA) for SAR raw data simulation. In Proceedings of the International Conference on Signal Processing Systems (ICSPS), Dalian, China, 5–7 July 2010; pp. 317–320. [Google Scholar]
- Eldhuset, K. High resolution spaceborne INSAR simulation with extended scenes. In Proceedings of the IEE Proceedings-Radar, Sonar and Navigation, Cincinnati, OH, USA, 25 July 2005; Volume 152, pp. 53–57. [Google Scholar]
- Duysak, H.; Yiğit, E. Investigation of the performance of different wavelet-based fusions of SAR and optical images using Sentinel-1 and Sentinel-2 datasets. Int. J. Eng. Geosci. 2022, 7, 81–90. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Phase gradient autofocus-A robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X. SAR minimum-entropy autofocus using an adaptive-order polynomial model. IEEE Geosci. Remote Sens. Lett. 2006, 3, 512–516. [Google Scholar] [CrossRef]
- Zeng, T.; Wang, R.; Li, F. SAR Image Autofocus Utilizing Minimum-Entropy Criterion. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1552–1556. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X.; Zhou, Z. Minimum-entropy phase adjustment for ISAR. IEEE Proc. Radar Sonar Navig. 2004, 151, 203–209. [Google Scholar] [CrossRef]
- Huang, X.; Ji, K.; Leng, X.; Dong, G.; Xing, X. Refocusing Moving Ship Targets in SAR Images Based on Fast Minimum Entropy Phase Compensation. Sensors 2019, 19, 1154. [Google Scholar] [CrossRef]
- Onhon, N.O.; Cetin, M. A sparsity-driven approach for joint SAR imaging and phase error correction. IEEE Trans. Image Process. 2012, 21, 2075–2088. [Google Scholar] [CrossRef]
- Ugur, S.; Arikan, O. SAR image reconstruction and autofocus by compressed sensing. Digit. Signal Process. 2012, 22, 923–932. [Google Scholar] [CrossRef]
- Kang, M.S.; Kim, K.T. Compressive sensing based SAR imaging and autofocus using improved Tikhonov regularization. IEEE Sens. J. 2019, 19, 5529–5540. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, L.; Bi, G.; Li, S.; Yang, L.; Zhang, H. Structured sparsity-driven autofocus algorithm for high-resolution radar imagery. Signal Proc. 2016, 125, 376–388. [Google Scholar] [CrossRef]
- Lee, H.; Jung, C.S.; Kim, K.W. Feature Preserving Autofocus Algorithm for Phase Error Correction of SAR Images. Sensors 2021, 21, 2370. [Google Scholar] [CrossRef]
- Lang, D.M. Range Sidelobe Response from the Use of Polyphase Signals in Spotlight Synthetic Aperture Radar; Naval Postgraduate School: Monterey, CA, USA, 2015. [Google Scholar]
- Wagner, Z.A. Investigation of Frequency Agility for LPI-SAR Waveforms; Naval Postgraduate School: Monterey, CA, USA, 2018. [Google Scholar]
- Yu, X.; Fu, Y.; Nie, L.; Zhao, G.; Zhang, W. A waveform with low intercept probability for OFDM SAR. In Proceedings of the IEEE Progress in Electromagnetics Research Symposium (PIERS), Shanghai, China, 8–11 August 2016; pp. 2054–2058. [Google Scholar]
- Garmatyuk, D.S.; Narayanan, R.M. ECCM capabilities of an ultrawideband bandlimited random noise imaging radar. IEEE Trans. Aerosp. Electron. Syst. 2002, 28, 1243–1255. [Google Scholar] [CrossRef]
- Tarchi, D.; Lukin, K.; Fortuny-Guasch, J.; Mogyla, A.; Vyplavin, P.; Sieber, A. SAR Imaging with Noise Radar. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1214–1225. [Google Scholar] [CrossRef]
- Wei, L.; Lin, Y.; Xu, G. A new method of phase-perturbed LFM chirp signals for SAR ECCM. In Proceedings of the China International SAR Symposium, Shanghai, China, 10–12 October 2018; pp. 1–4. [Google Scholar]
- Hossain, M.A.; Elshafiey, I.; Alkanhal, M.A.; Mabrouk, A. Anti-jamming capabilities of UWB-OFDM SAR. In Proceedings of the 2011 8th European Radar Conference, Manchester, UK, 12–14 October 2011; pp. 313–316. [Google Scholar]
- Feng, X.; Xu, X. ECCM performance analysis of chaotic coded orthogonal frequency division multiplexing (COFDM) SAR. In Proceedings of the SPIE, Orlando, FL, USA, 21 June 2011; pp. 80211K-1–80211K-9. [Google Scholar]
- Chunrui, Y.; Xile, M.; Yongsheng, Z.; Zhen, D.; Diannong, L. Multichannel SAR ECCM based on Fast-time STAP and Pulse diversity. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 921–924. [Google Scholar]
- Schuerger, J.; Garmatyuk, D. Multifrequency OFDM SAR in presence of deception jamming. EURASIP J. Adv. Signal Processing 2010, 2010, 451851. [Google Scholar] [CrossRef]
- Sounekh, M. SAR-ECCM using phase-perturbed LFM chirp signals and DRFM repeat jammer penalization. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 191–204. [Google Scholar] [CrossRef]
- Huang, H.; Zhou, Y.; Jiang, W.; Huang, Z. A new time-delay echo jamming style to SAR. In Proceedings of the 2nd International Conference on Signal Processing Systems, Dalian, China, 5–7 October 2010; Volume 3, pp. V3-14–V3-17. [Google Scholar]
- Bo, L. Simulation study of noise convolution jamming countering to SAR. In Proceedings of the 2010 International Conference on Computer Design and Applications, Qinhuangdao, China, 25–27 June 2010; Volume 4, pp. V4-130–V4-133. [Google Scholar]
- Wei, Y.; Hang, R.; Shuxian, Z.; Li, Y. Study of noise jamming based on convolution modulation to SAR. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; pp. 169–172. [Google Scholar]
- Ammar, M.; Hassan, H.; Abdel-Latif, M.; Elgamel, S.A. Performance evaluation of SAR in presence of multiplicative noise jamming. In Proceedings of the 2017 34th National Radio Science Conference (NRSC), Alexandria, Egypt, 13–16 March 2017; pp. 213–220. [Google Scholar]
- Chang, X.; Dong, C. A Barrage Noise Jamming Method Based on Two Transponders Against Three Channel SAR GMTI. IEEE Access. 2019, 7, 18755–18763. [Google Scholar] [CrossRef]
- Feng, Z.; Bo, Z.; Mingliang, T.; Xueru, B.; Bo, C.; Guangcai, S. A Large scene deceptive jamming method for space-borne SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4486–4495. [Google Scholar] [CrossRef]
- Yang, K.; Ye, W.; Ma, F.; Li, G.; Tong, Q. A Large-Scene Deceptive Jamming Method for Space-Borne SAR Based on Time-Delay and Frequency-Shift with Template Segmentation. Remote Sens. 2020, 12, 53. [Google Scholar] [CrossRef]
- Bo, Z.; Feng, Z.; Zheng, B. Deception jamming for squint SAR based on multiple receivers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3988–3998. [Google Scholar]
- Bo, Z.; Lei, H.; Jian, L.; Maliang, L.; Jinwei, W. Deceptive SAR jamming based on 1-bit sampling and time-varying thresholds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 939–950. [Google Scholar]
- Qingyang, S.; Ting, S.; Kaibor, Y.; Wenxian, Y. Efficient deceptive jamming method of static and moving targets against SAR. IEEE Sens. J. 2018, 18, 3601–3618. [Google Scholar]
- Ruan, H.; Ye, W.; Yin, C.; Zhang, S. Wide band noise interference suppression for SAR with dechirping and eigensubspace filtering. In Proceedings of the 2010 International Conference on Intelligent Control and Information Processing, Dalian, China, 13–15 August 2010; pp. 39–42. [Google Scholar]
- Harness, R.S.; Budge, M.C. A study on SAR noise jamming and false target insertion. In Proceedings of the IEEE SOUTHEASTCON 2014, Lexington, KY, USA, 13–16 March 2014; pp. 1–8. [Google Scholar]
- Doerry, A. Performance Limits for Synthetic Aperture Radar, 2nd ed.; Sandia Nat. Lab.: Albuquerque, NM, USA, 2006. [Google Scholar]
- Collins, M.J.; Allan, J.M. Modeling and simulation of SAR image texture. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3530–3546. [Google Scholar] [CrossRef]
- Yue, D.X.; Xu, F.; Frery, A.C.; Jin, Y.Q. SAR Image Statistical Modeling Part I: Single-Pixel Statistical Models. IEEE Geosci. Remote. Sens. Mag. 2021, 9, 82–114. [Google Scholar] [CrossRef]
- Kim, T.J.; Fellerhoff, J.R.; Kohler, S.M. An Integrated Navigation System Using GPS Carrier Phase for Real-Time Airborne/Synthetic Aperture Radar (SAR). J. Inst. Navig. 2001, 48, 13–24. [Google Scholar] [CrossRef]
- Fang, J.C.; Gong, X.L. Predictive iterated Kalman filter for INS/GPS integration and its application to SAR motion compensation. IEEE Trans. Instrum. Meas. 2010, 59, 909–915. [Google Scholar] [CrossRef]
- Park, Y.; Park, Y.B.; Jung, J.; Shin, H.S.; Park, C.G. Novel Motion Sensing Algorithm for Improving SAR Imaging by Parametric Error Modeling. Int. J. Aeronaut. Space Sci. 2019, 20, 761–767. [Google Scholar] [CrossRef]
- Song, J.W.; Park, C.G. INS/GPS Integrated Smoothing Algorithm for Synthetic Aperture Radar Motion Compensation Using an Extended Kalman Filter with a Position Damping Loop. Int. J. Aeronaut. Space Sci. 2017, 18, 118–128. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | ||
|---|---|---|---|
| Hardware | Radar | Sampling frequency | 360 MHz |
| Antenna transmission gain | 35 dB | ||
| Effective area of the receiving antenna | 0.1427 m2 | ||
| Radar transmission loss | 3.5 dB | ||
| Navigation | Sampling frequency | 200 Hz | |
| Horizontal position error () | 1.2 m | ||
| Vertical position error () | 1.9 m | ||
| Velocity error () | 0.03 m/s | ||
| Waveform | Center frequency | 10 GHz | |
| PRF | 375.4 Hz | ||
| Duty cycle | 13% | ||
| Bandwidth | 360 MHz | ||
| Peak power | 10 kW | ||
| Modulation type | Noise | ||
| SAR mission | Slant range | 80 km | |
| Squint angle | 45 deg | ||
| Platform velocity | 570 kts | ||
| SAT | 14.24 s | ||
| 2-way atmospheric loss | 3.16 dB | ||
| Scene | Reflectivity of the brightest area of the input image | 30 dB | |
| Reflectivity of the inserted point target | 30 dB, 10 dB, −10 dB, −20 dB | ||
| Jammer | JESZ | −20 dB | |
| Jamming method | NCJ/FTJ | ||
| Autofocus Algorithm | Number of Iterations | Image Quality | Azimuth IRF | |||
|---|---|---|---|---|---|---|
| Contrast | Entropy | Resolution (m) | PSLR (dB) | ISLR (dB) | ||
| No motion error | - | 6.79 | 12.05 | 0.47 | −32.11 | −26.33 |
| No autofocus | - | 4.68 | 12.50 | 0.58 | −4.96 | −3.52 |
| PGA | 4 | 5.63 | 12.11 | 0.47 | −27.77 | −24.70 |
| ME | 32 | 6.18 | 12.08 | 0.47 | −18.75 | −18.43 |
| FPA | 8 | 5.97 | 12.08 | 0.47 | −28.84 | −25.69 |
| Reflectivity of the Point Target (dB) * | Measured SJR (dB) | Measured JESZ (dB) | Desired JESZ (dB) |
|---|---|---|---|
| 30 | 49.34 | −19.34 | −20 |
| 10 | 29.43 | −19.43 | −20 |
| −10 | 9.60 | −19.60 | −20 |
| −20 | N/A | N/A | −20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kim, K.-W. An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR. Remote Sens. 2022, 14, 3897. https://doi.org/10.3390/rs14163897
Lee H, Kim K-W. An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR. Remote Sensing. 2022; 14(16):3897. https://doi.org/10.3390/rs14163897
Chicago/Turabian StyleLee, Haemin, and Ki-Wan Kim. 2022. "An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR" Remote Sensing 14, no. 16: 3897. https://doi.org/10.3390/rs14163897
APA StyleLee, H., & Kim, K.-W. (2022). An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR. Remote Sensing, 14(16), 3897. https://doi.org/10.3390/rs14163897